Phân tích hệ thống điều khiển hồi tiếp | Tiểu luận Điều khiển học
Trong thế kỷ 21, việc áp dụng các phương pháp điều khiển tự động đã trở thành một phần không thể thiếu trong nhiều lĩnh vực công nghiệp và kỹ thuật. Từ các hệ thống tự động hóa trong sản xuất công nghiệp đến các thiết bị thông minh trong cuộc sống hàng ngày, điều khiển chính là trái tim của sự tự động hóa và tiến bộ công nghệ. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Môn: Điều khiển học 1 tài liệu
Trường: Trường Đại học Văn Lang 1.5 K tài liệu
Tác giả:












Preview text:
TRƯỜNG ĐẠI HỌC VĂN LANG KHOA KỸ THUẬT Ô TÔ TIỂU LUẬN
MÔN HỌC: ĐIỀU KHIỂN HỌC ĐỀ TÀI
PHÂN TÍCH HỆ THỐNG ĐIỀU KHIỂN HỒI TIẾP GV: ThS Trần Minh Kết
Người thực hiện: Lê Huỳnh Bảo Huy
Tp. Hồ Chí Minh, ngày 21 tháng 7 năm 2024 MỤC LỤC
LỜI MỞ ĐẦU.................................................................................................................... 2
CHƯƠNG 1: CƠ SỞ LÝ THUYẾT...................................................................................3
I. TRÌNH BÀY CƠ SỞ LÝ THUYẾT VỀ ĐIỀU KHIỂN TỰ ĐỘNG?.........................3
1.1. Giới thiệu chủ đề.................................................................................................3
1.2. Cơ sở lý thuyết....................................................................................................4
1.3. PHÂN TÍCH VÀ ỨNG DỤNG.........................................................................11
1.4. Thách thức và hướng phát triển.........................................................................15
CHƯƠNG 2: PHÂN TÍCH HỆ THỐNG ĐIỀU KHIỂN HỒI TIẾP?...............................16
2.1. Giới thiệu hệ thống...........................................................................................16
2.2. Phân tích động học hệ thống.............................................................................18
2.3. Thiết kế bộ điều khiển......................................................................................19
2.4. Đánh giá và tối ưu hóa hệ thống.......................................................................23
CHƯƠNG 3: ỨNG DỤNG THỰC TẾ CỦA LÝ THUYẾT ĐIỀU KHIỂN TỰ ĐỘNG
TRÊN Ô TÔ..................................................................................................................... 27
3.1. Giới thiệu ứng dụng.......................................................................................... 27
3.2. Phân tích hệ thống điều khiển ABS..................................................................28
3.3. Kết quả và thách thức.......................................................................................30
CHƯƠNG 4: KẾT LUẬN................................................................................................32
Tài liệu tham khảo............................................................................................................ 34 1 LỜI MỞ ĐẦU
Trong thế kỷ 21, việc áp dụng các phương pháp điều khiển tự động đã trở thành
một phần không thể thiếu trong nhiều lĩnh vực công nghiệp và kỹ thuật. Từ các hệ thống
tự động hóa trong sản xuất công nghiệp đến các thiết bị thông minh trong cuộc sống hàng
ngày, điều khiển chính là trái tim của sự tự động hóa và tiến bộ công nghệ.
Bộ môn điều khiển học không chỉ là nền tảng lý thuyết vững chắc mà còn là một
bước đệm quan trọng giúp sinh viên áp dụng kiến thức vào thực tiễn. Trải qua môn học
này, chúng ta sẽ cùng nhau khám phá từng khía cạnh của hệ thống điều khiển, từ lý
thuyết cơ bản nhưng quan trọng đến các ứng dụng thực tế phức tạp.
Trong quá trình học tập và tìm hiểu môn Điều khiển học, chúng em đã nhận được
rất nhiều sự quan tâm, giúp đỡ, hưỡng dẫn tâm huyết và tận tình của thầy Trần Minh Kết.
Thầy đã giúp chúng em tích lũy thêm nhiều kiến thức về môn học này để có thể hoàn
thành được bài tiểu luận này. Trong quá trình làm bài khó tránh khỏi những thiếu sót. Do
đó, chúng em kính mong nhận được những lời góp ý của thầy để bài tiểu luận của chúng
em ngày càng hoàn thiện hơn. Em xin chân thành cảm ơn! 2
CHƯƠNG 1: CƠ SỞ LÝ THUYẾT
I. TRÌNH BÀY CƠ SỞ LÝ THUYẾT VỀ ĐIỀU KHIỂN TỰ ĐỘNG?
1.1. Giới thiệu chủ đề.
- Điều khiển tự động là một lĩnh vực khoa học và kỹ thuật liên quan đến việc
điều khiển các hệ thống mà không cần đến sự can thiệp của con người. Nó dựa trên việc
sử dụng các thiết bị và công nghệ để thu thập thông tin về trạng thái của hệ thống và điều
chỉnh các tham số để đạt được hiệu quả tối ưu trong quá trình vận hành.
Công nghệ kỹ thuật điều khiển – tự động hoá
- Điều khiển tự động được ứng dụng trong nhiều lĩnh vực như công nghiệp sản
xuất, hàng không vũ trụ, ô tô, và robot. Sự phát triển của điều khiển tự động đã giúp tối
ưu hóa quy trình sản xuất, cải thiện độ chính xác và độ tin cậy của các hệ thống, đồng
thời giảm thiểu rủi ro cho con người. 3
1.2. Cơ sở lý thuyết.
- Khái niệm: Hệ thống điều khiển là một hệ thống được thiết kế để điều khiển và
quản lý các quá trình và hoạt động trong một hệ thống tự động. Nó bao gồm các thành
phần cơ học, điện tử, và phần mềm để thu thập thông tin từ môi trường, xử lý dữ liệu và
điều khiển các thiết bị và máy móc.
Hệ thống điều khiển học
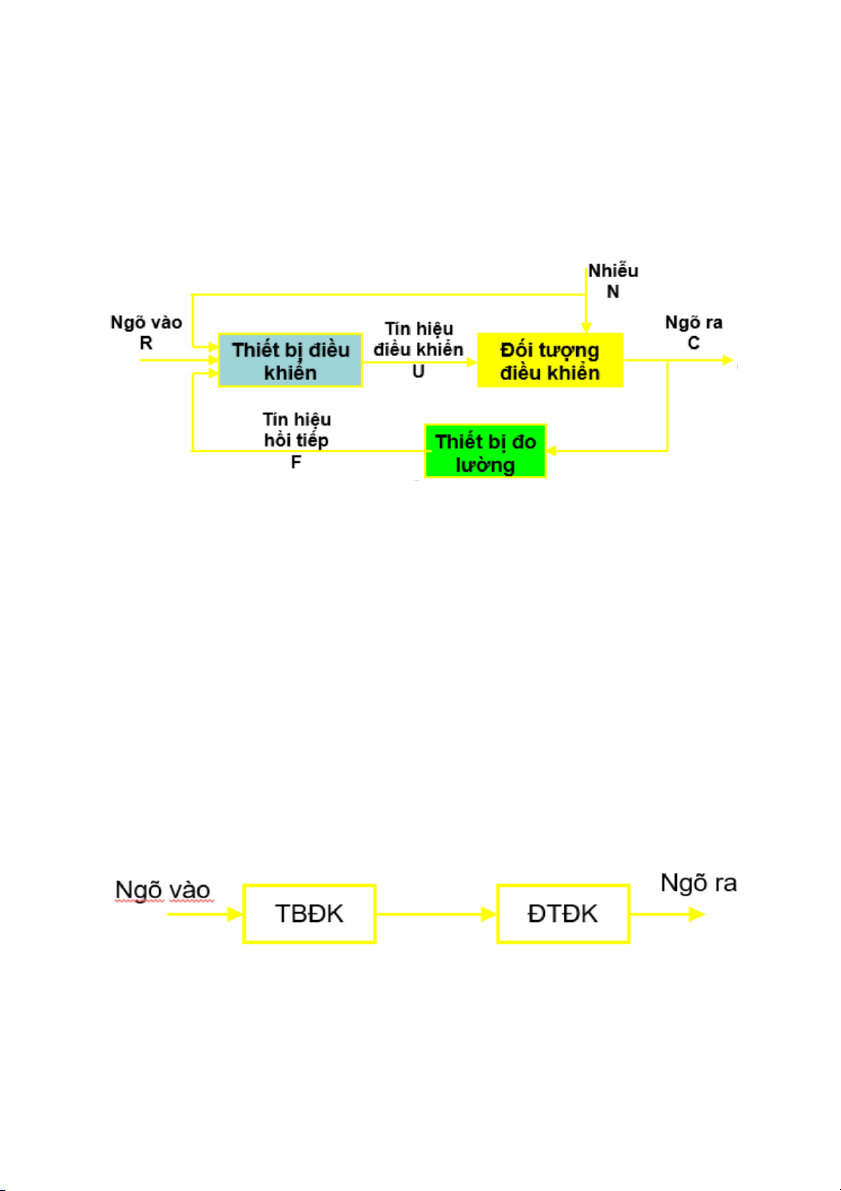
- Hệ thống điều khiển: Là tập hợp các phần tử và thiết bị phối hợp với nhau để
điều khiển một quá trình hoặc hệ thống.
- Đầu vào (Input): Tín hiệu hoặc dữ liệu đưa vào hệ thống để tạo ra phản ứng mong muốn.
- Đầu ra (Output): Tín hiệu hoặc dữ liệu mà hệ thống sản xuất ra.
- Phản hồi (Feedback): Tín hiệu từ đầu ra được đưa trở lại đầu vào để điều
chỉnh hành vi của hệ thống.
+ Hệ thống điều khiển hở: Không có tín hiệu phản hồi từ ngõ ra về thiết bị điều khiển
Hệ thống điều khiển hở 4
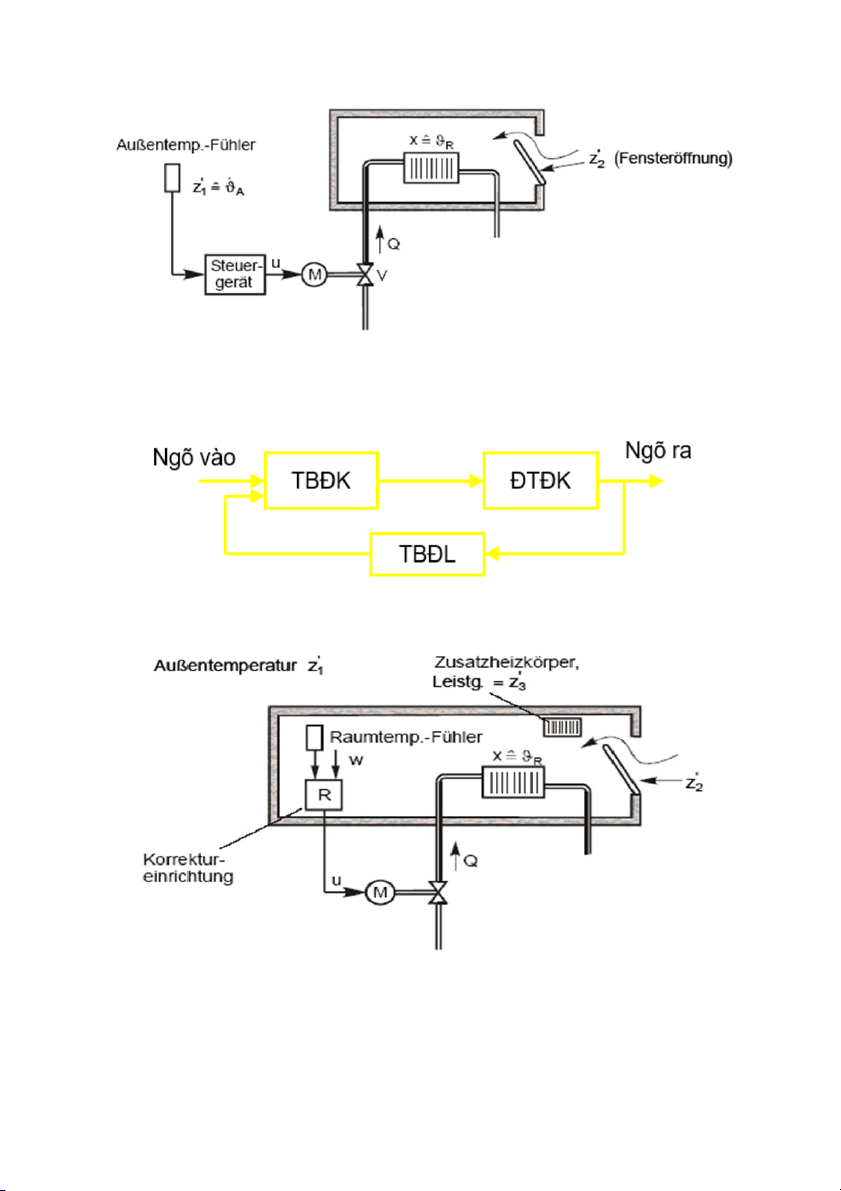
Hệ thống điều chỉnh nhiệt độ trong phòng
+ Hệ thống điều khiển kín: Có tín hiệu phản hồi từ ngõ ra về thiết bị điều khiển. -
Nguyên lý: Hệ thống
Hệ thống điều khiển kín
điều khiển là một phần
quan trọng trong các quá trình tự động hóa và kiểm soát. Nó có vai trò quan trọng trong
việc duy trì và điều khiển quá trình để đảm bảo hoạt động ổn định và hiệu quả. Nguyên lý 5
hoạt động của hệ thống điều khiển dựa trên việc thu thập thông tin từ môi trường, xử lý
dữ liệu và đưa ra các tín hiệu điều khiển để điều chỉnh hoạt động của các thiết bị và quá trình.
+ Phát hiện sai số (Error Detection): Bộ điều khiển nhận tín hiệu phản hồi từ
cảm biến và so sánh nó với giá trị mong muốn để tính toán lỗi.
+ Điều chỉnh đầu vào (Input Adjustment): Bộ điều khiển dựa trên tín hiệu lỗi
để điều chỉnh đầu vào nhằm giảm sai số.
+ Phản hồi liên tục (Continuous Feedback): Quá trình này diễn ra liên tục,
đảm bảo rằng đầu ra của hệ thống duy trì gần với giá trị mong muốn.
- Phân tích và ứng dụng.
+ Hệ thống liên tục: Hệ thống liên tục được mô tả bằng phương trình vi phân.
+ Hệ thống rời rạc: Hệ thống rời rạc được mô tả bằng phương trình sai phân.
+ Hệ thống tuyến tính: Hệ thống được mô tả bởi hệ phương trình vi phân/ sai phân tuyến tính.
+ Hệ thống phi tuyến: Hệ thống mô tả bởi hệ phương trình vi phân/sai phân phi tuyến.
+ Hệ thống bất biến theo thời gian: Hệ số của phương trình vi phân/sai phân
mô tả hệ thống không đổi.
+ Hệ thống biến đổi theo thời gian: Hệ số của phương trình vi phân/sai phân
mô tả hệ thống thay đổi theo thời gian.
+ Hệ thống một ngõ vào – một ngõ ra (hệ SISO): (Singgle Input – Single Output).
+ Hệ thống nhiều ngõ vào – nhiều ngõ ra (hệ MIMO): (Multi Input – Multi Output). 6
- Điều khiển kinh điển.
+ Mô tả toán học dùng để phân tích và thiết kế hệ thống là hàm truyền. + Đặc điểm: Đơn giản.
Áp dụng thuận lợi cho hệ thống tuyến tính bất biến một ngõ vào, một ngõ ra.
Kỹ thuật thiết kế trong miền tần số.
+ Các phương pháp phân tích và thiết kế hệ thống:
Quỹ đạo nghiệm số.
Đặc tính tần số: biểu đồ Nyquist, biểu đồ Bode.
+ Bộ điều khiển: Sớm trễ pha.
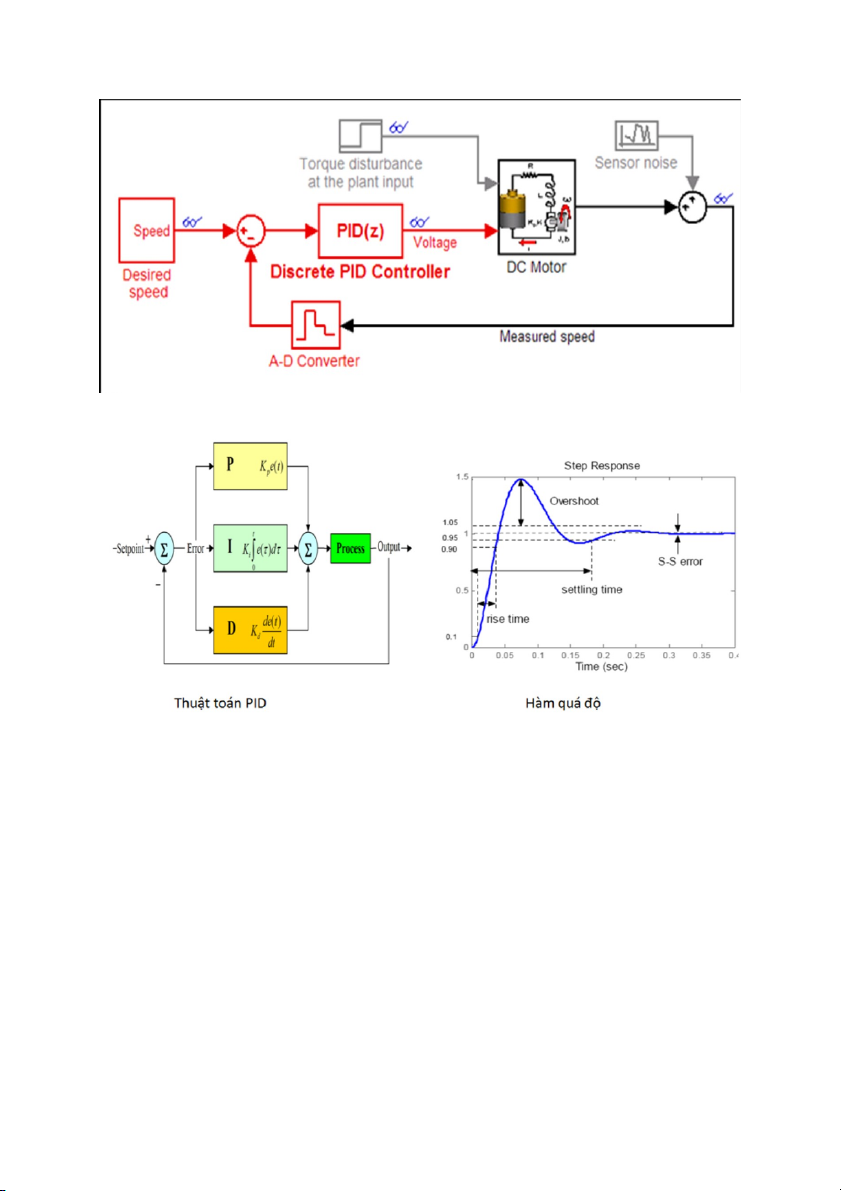
PID (Proporitional – Integral – Derivaive)
Điều khiển kinh điển 7
- Điều khiển hiện tại:
+ Mô tả toán học chủ yếu dùng để phân tích và thiết kế hệ thống là phương trình trạng thái. + Đặc điểm: 8
Có thể áp dụng cho hệ thống phi tuyến, biến đổi theo thời gian, nhiều ngõ vào, nhiều ngõ ra.
Kỹ thuật thiết kế trong miền thời gian.
+ Các phương pháp thiết kế hệ thống: Điều khiển tối ưu.
Điều khiển thích nghi.
Điều khiển bền vững. + Bộ điều khiển:
Hồi tiếp trạng thái. - Điều khiển thông minh.
+ Về nguyên tắc không cần dùng mô hình toán học để thiết kế hệ thống. + Đặc điểm:
Mô phỏng / bắt chước các hệ thống thông minh sinh học..
Bộ điều khiển có khả năng xử lý thông tin không chắc chắn, có khả năng
học, có khả năng xử lý lượng lớn thông tin.
+ Các phương pháp điều khiển thông minh:
Điều khiển mờ (Fuzzy Control).
Mạng thần kinh nhân tạo (Neural Network).
Thuật toán di truyền (Genetic Algorithm).
- Hệ thống điều khiển học bao gồm 3 phần chủ yếu:
+ Thiết bị điều khiển (TBĐK).
+ Đối tượng điều khiển (ĐTĐK). 9
+ Thiết bị đo lường và cảm biến (TBĐL). - Cảm biến.
Cảm biến là thành phần quan trọng của hệ thống điều khiển, chịu trách nhiệm thu
thập thông tin về trạng thái hoặc biến đổi trong quá trình. Cảm biến
Cảm biến có thể đo lường các thông số như nhiệt độ, áp suất, độ ẩm, vị trí, tốc độ,
v.v. và chuyển đổi chúng thành tín hiệu điện hoặc tín hiệu analog để truyền đến bộ điều khiển. - Bộ điều khiển.
Bộ điều khiển là trí thông minh của hệ thống điều khiển, có nhiệm vụ xử lý thông
tin từ cảm biến và đưa ra các quyết định điều khiển phù hợp. 10 Bộ điều khiển 11
Bộ điều khiển hoạt động dựa trên các thuật toán và luật điều khiển, sử dụng các tín
hiệu đầu vào từ cảm biến để tính toán và tạo ra các tín hiệu điều khiển để điều chỉnh hoạt động của hệ thống.
- Thiết bị điều khiển.
+ Thiết bị điều khiển là thành phần thực hiện các tác động hoặc điều chỉnh trực
tiếp đến quá trình hoạt động của hệ thống.
+ Thiết bị điều khiển có thể là các bộ điều khiển tự động, van điều khiển, động cơ
điện, đèn LED, v.v. và chịu trách nhiệm thực hiện các tín hiệu điều khiển từ bộ điều
khiển để điều chỉnh hoạt động của hệ thống.
- Các thành phần cơ bản của hệ thống điều khiển tương tác với nhau để đảm bảo
sự ổn định và điều khiển hiệu quả quá trình. Sự cân nhắc và tính toán chính xác của bộ
điều khiển dựa trên thông tin từ cảm biến giúp điều chỉnh thiết bị điều khiển phù hợp, đáp
ứng đúng yêu cầu và điều kiện của hệ thống.
1.3. PHÂN TÍCH VÀ ỨNG DỤNG.
- Giới thiệu về các ứng dụng cụ thể của điều khiển học trong ngành ô tô.
Điều khiển học có vai trò quan trọng và được ứng dụng một cách rộng rãi trong ngành ô
tô, nhằm nâng cao tính an toàn, hiệu suất và trải nghiệm người dùng.
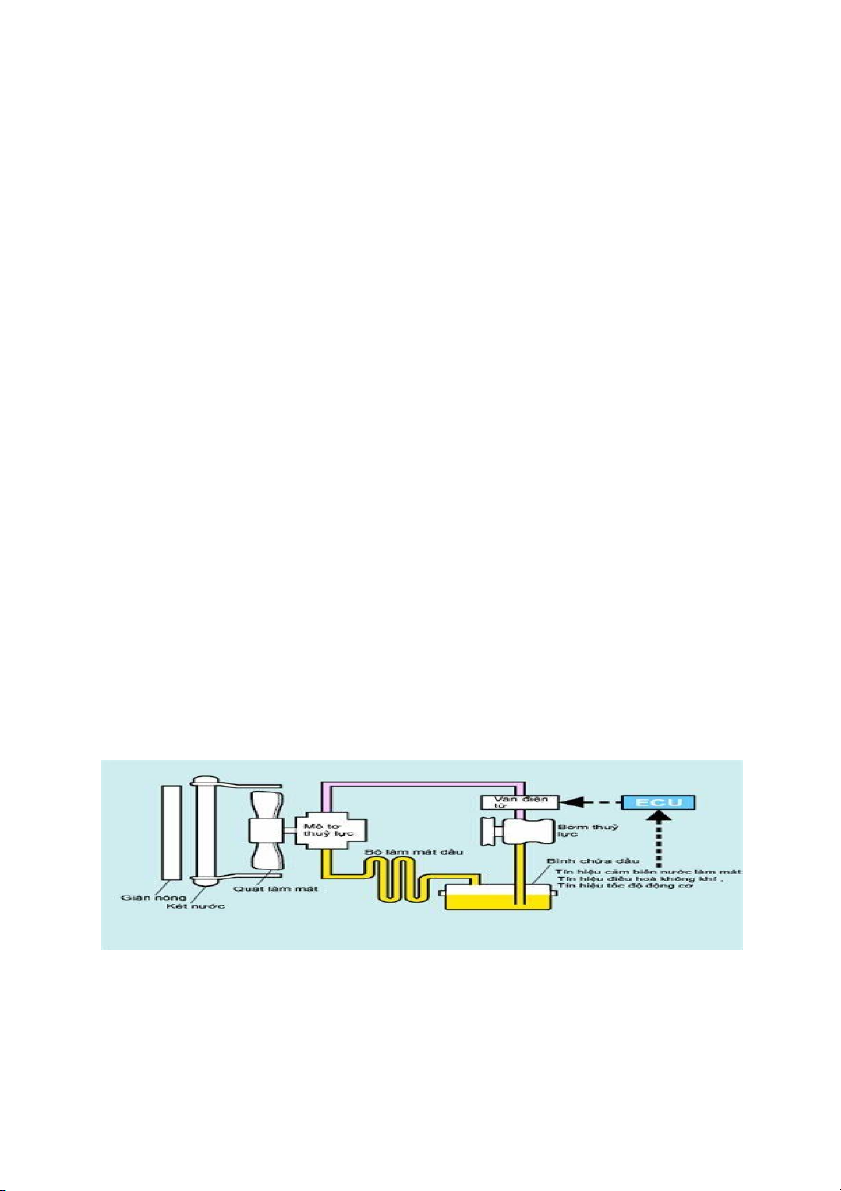
Hệ thống điều khiển động cơ (Engine Control Unit - ECU):
- Ứng dụng: Điều khiển hoạt động của động cơ, bao gồm cung cấp nhiên liệu, thời điểm
đánh lửa và kiểm soát khí thải.
- Lợi ích: Tối ưu hóa hiệu suất động cơ, giảm tiêu thụ nhiên liệu và giảm phát thải.
Hệ thống làm mát động cơ đốt trong 12
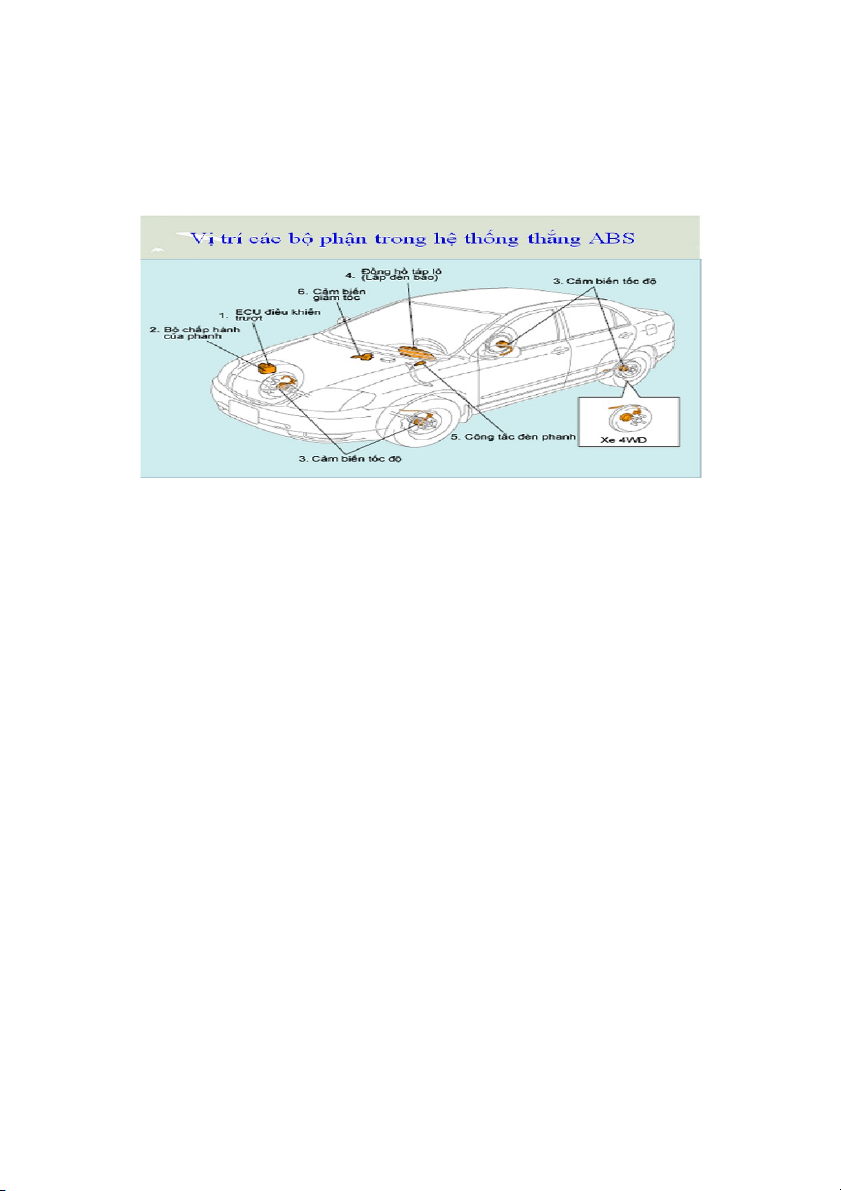
Hệ thống chống bó cứng phanh (Anti-lock Braking System - ABS):
- Ứng dụng: Điều khiển lực phanh để tránh tình trạng bánh xe bị khóa khi phanh gấp.
- Lợi ích: Cải thiện độ an toàn bằng cách giữ cho bánh xe không bị trượt, giúp tài xế duy trì kiểm soát xe.
Hệ thống chống bó cứng phanh
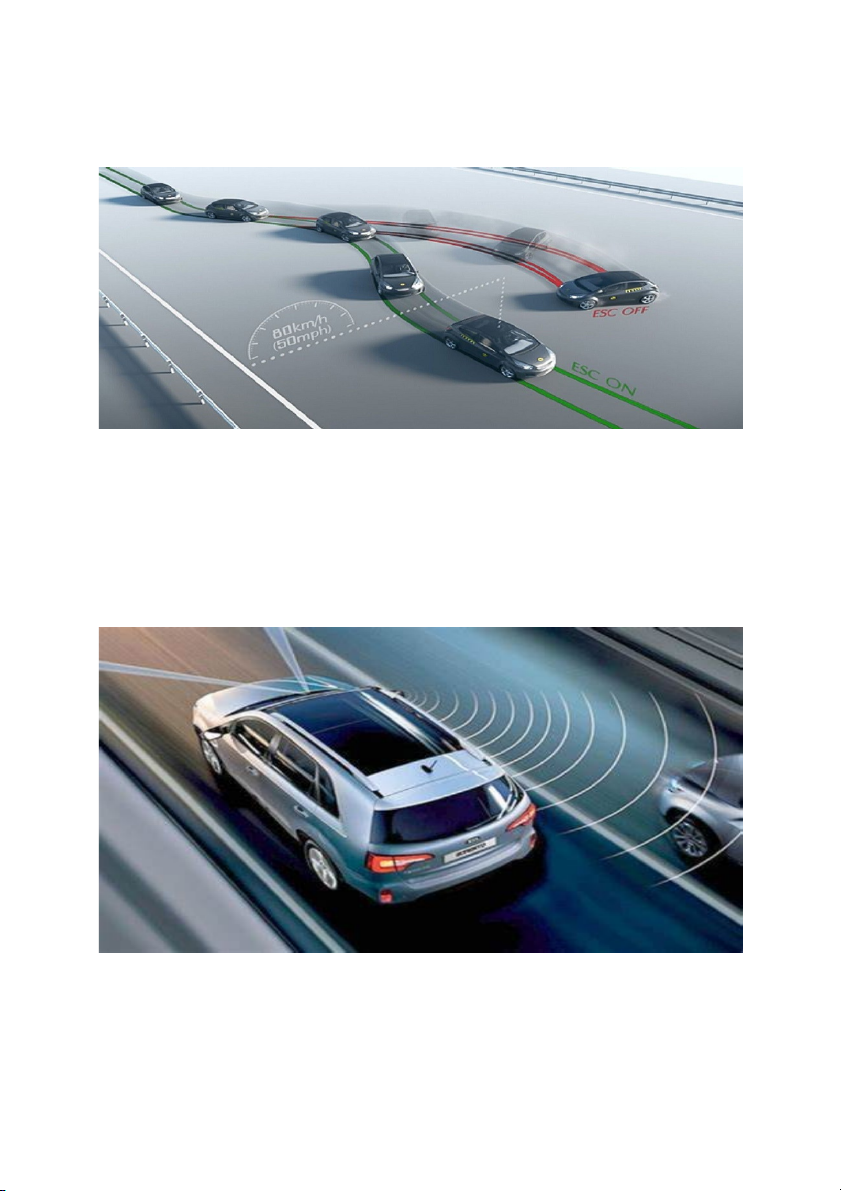
Hệ thống kiểm soát ổn định điện tử (Electronic Stability Control - ESC):
- Ứng dụng: Giúp xe duy trì ổn định bằng cách điều chỉnh lực phanh trên từng bánh xe và
điều chỉnh công suất động cơ. 13
- Lợi ích: Giảm nguy cơ mất lái, đặc biệt trong các tình huống lái khẩn cấp hoặc điều kiện đường trơn trượt.
Hệ thống kiểm soát ổn định điện tử
Hệ thống cảnh báo và duy trì làn đường (Lane Departure Warning - LDW và
Lane Keeping Assist - LKA):
- Ứng dụng: Cảnh báo tài xế khi xe lệch khỏi làn đường mà không bật tín hiệu và thực
hiện các điều chỉnh nhỏ để đưa xe trở lại làn đường.
- Lợi ích: Giảm nguy cơ tai nạn do mất tập trung hoặc buồn ngủ khi lái xe.
Hệ thống cảnh báo chệch làn và hỗ trợ duy trì làn đường 14
Hệ thống điều khiển hành trình (Cruise Control) và điều khiển hành trình
thích ứng (Adaptive Cruise Control - ACC):
- Ứng dụng: Duy trì tốc độ xe và khoảng cách an toàn với xe phía trước.
- Lợi ích: Giảm mệt mỏi cho tài xế trong các chuyến đi dài và tăng tính an toàn.
Hệ thống điều khiển hành trình
Hệ thống hỗ trợ đỗ xe (Parking Assist System):
- Ứng dụng: Sử dụng cảm biến và camera để giúp tài xế đỗ xe dễ dàng.
- Lợi ích: Giảm căng thẳng và rủi ro va chạm khi đỗ xe. 15
Hỗ trợ đỗ xe tự động
Hệ thống quản lý nhiệt (Thermal Management System):
- Ứng dụng: Điều khiển nhiệt độ trong khoang động cơ và cabin xe.
- Lợi ích: Đảm bảo hiệu suất tối ưu của động cơ và sự thoải mái cho người dùng.
Hệ thống lái tự động (Autonomous Driving Systems):
- Ứng dụng: Sử dụng các cảm biến, máy tính và thuật toán điều khiển để tự động hóa việc lái xe.
- Lợi ích: Hứa hẹn giảm thiểu tai nạn giao thông, tối ưu hóa giao thông và cung cấp sự
tiện lợi vượt trội cho người dùng.
Nhờ các ứng dụng điều khiển học, ngành ô tô đã đạt được nhiều tiến bộ vượt bậc trong
việc cải thiện độ an toàn, hiệu suất và trải nghiệm người dùng, từ đó đóng góp vào sự
phát triển của phương tiện giao thông thông minh và bền vững.
1.4. Thách thức và hướng phát triển. - Thách thức:
+ Độ tin cậy của cảm biến: Cảm biến có thể bị ảnh hưởng bởi các yếu tố môi
trường như thời tiết, ánh sáng và vật cản.
+ Phản ứng chậm: Một số hệ thống có thể phản ứng chậm, dẫn đến việc không
đạt được hiệu quả mong muốn trong các tình huống khẩn cấp.
+ Chi phí: Chi phí phát triển và tích hợp các hệ thống điều khiển tự động vẫn
còn cao, đặc biệt là với các công nghệ tiên tiến.
- Hướng phát triển:
+ Cải tiến công nghệ cảm biến: Nghiên cứu và phát triển các loại cảm biến mới
với độ chính xác và độ tin cậy cao hơn.
+ Tăng cường trí tuệ nhân tạo (AI): Sử dụng AI để cải thiện khả năng học hỏi
và thích ứng của hệ thống điều khiển, giúp hệ thống phản ứng nhanh hơn và hiệu quả 16 hơn.
+ Giảm chi phí sản xuất: Tìm kiếm các giải pháp kỹ thuật và quy trình sản xuất
mới để giảm chi phí, giúp các hệ thống điều khiển tự động trở nên phổ biến hơn.
- Đề xuất giải pháp:
+ Nghiên cứu và phát triển cảm biến tích hợp AI: Kết hợp công nghệ AI với
cảm biến để cải thiện khả năng nhận diện và phản ứng của hệ thống.
+ Tối ưu hóa thuật toán điều khiển: Phát triển các thuật toán điều khiển tối ưu
để giảm thiểu sai số và tăng hiệu quả hoạt động.
+ Hợp tác công nghiệp: Tăng cường hợp tác giữa các nhà sản xuất ô tô, các
công ty công nghệ và các cơ quan nghiên cứu để chia sẻ kiến thức và nguồn lực, từ đó
thúc đẩy sự phát triển và ứng dụng của các hệ thống điều khiển tự động. 17
CHƯƠNG 2: PHÂN TÍCH HỆ THỐNG ĐIỀU KHIỂN HỒI TIẾP?
2.1. Giới thiệu hệ thống.
Hệ thống điều khiển hồi tiếp (Closed-loop Control System) là một loại hệ thống
điều khiển trong đó một phần của đầu ra được đưa trở lại làm đầu vào để điều chỉnh hành
vi của hệ thống nhằm đạt được kết quả mong muốn. Điểm đặc trưng của hệ thống này là
khả năng tự điều chỉnh dựa trên phản hồi từ đầu ra, giúp duy trì sự ổn định và hiệu suất
của hệ thống ngay cả khi có sự thay đổi trong môi trường hoặc nhiễu loạn.
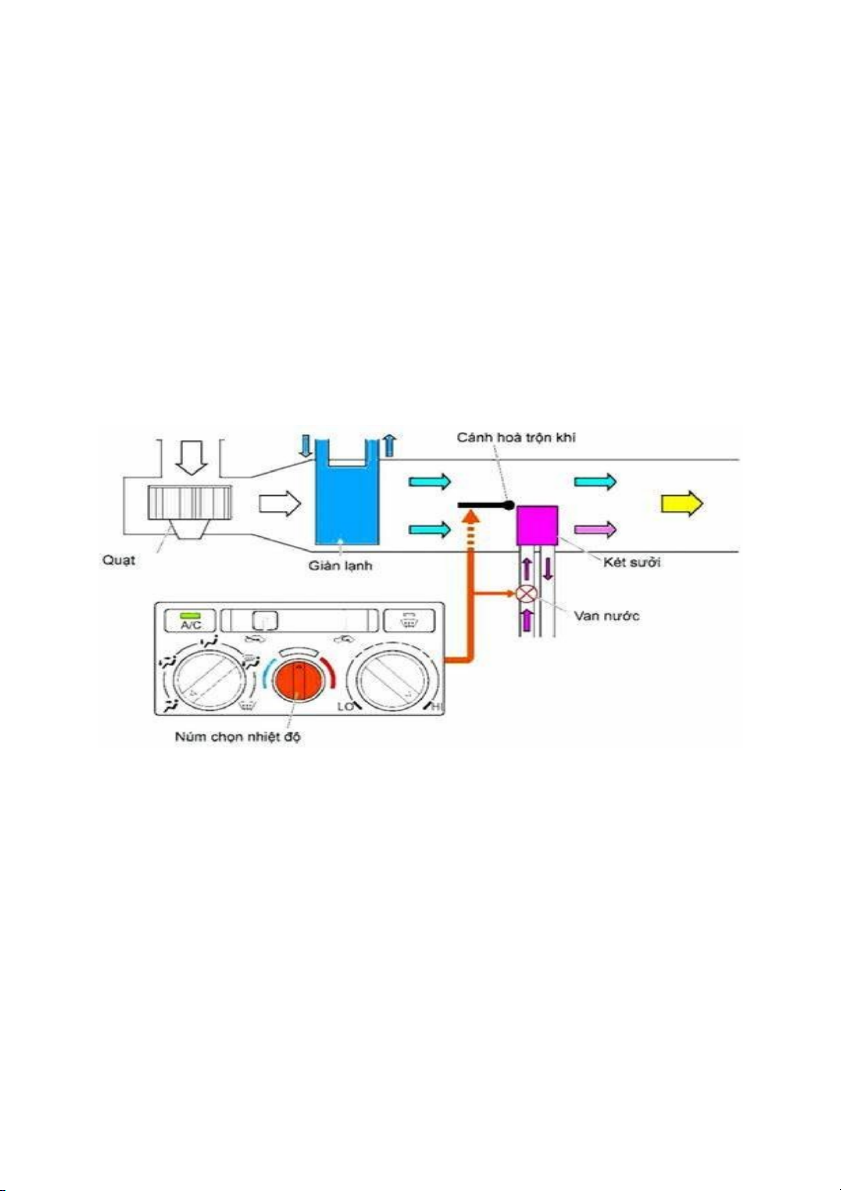
- Hệ thống điều khiển hồi tiếp được chọn: Hệ thống điều khiển nhiệt độ.
Hệ thống điều hòa không khí trên ô tô
- Bộ điều khiển (Controller):
Chức năng: So sánh nhiệt độ đo được với nhiệt độ mong muốn và tính toán sai
số, sau đó điều chỉnh tín hiệu điều khiển để giảm sai số này.
Ví dụ: Bộ điều khiển PID (Proportional-Integral-Derivative). 18
- Đối tượng điều khiển (Process):
Chức năng: Là hệ thống mà nhiệt độ của nó cần được điều khiển.
Ví dụ: Một căn phòng, lò nung, hoặc hệ thống HVAC.
- Cảm biến nhiệt độ (Temperature Sensor):
Chức năng: Đo lường nhiệt độ hiện tại của đối tượng điều khiển và gửi thông
tin này về bộ điều khiển.
Ví dụ: Cảm biến nhiệt độ kỹ thuật số hoặc analog.
- Bộ truyền động (Actuator):
Chức năng: Thực hiện các hành động điều khiển dựa trên tín hiệu từ bộ điều khiển để
thay đổi nhiệt độ của đối tượng điều khiển.
Ví dụ: Máy sưởi, máy điều hòa không khí, hoặc van điều khiển dòng nhiệt.
Sơ đồ khối của hệ thống điều khiển nhiệt độ:
- Mô tả hoạt động của hệ thống:
+ Phát hiện sai số (Error Detection):
Cảm biến nhiệt độ đo nhiệt độ hiện tại trong phòng và gửi giá trị này đến bộ điều khiển.
Bộ điều khiển so sánh nhiệt độ đo được với nhiệt độ mong muốn và tính toán sai số (difference).
+ Tạo tín hiệu điều khiển (Control Signal Generation): 19