phân tích lý thuyết điều khiển hiện đại
nói về môn lý thuuyeet điêu khiên
Môn: Ngôn ngữ lập trình 130 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:

Preview text:
HƯỚNG DẪN DẪN CÁCH LÀM TIỂU LUẬN Chương 1 Mở đầu
Trình bày tất cả các kiến thức cơ bản về lý thuyết điều khiển phi tuyến
- Khái niệm hệ phi tuyến
- Mô hình toán học hệ thống điều khiển
- Phương pháp tổng hợp bộ điều khiển phi tuyến:
+ Phương pháp điều khiển bằng hàm Lyapunov
Ví dụ: Phương pháp điều khiển bằng hàm Lyapunov là một trong những kỹ thuật quan trọng trong
lý thuyết điều khiển, được sử dụng để phân tích và thiết kế các hệ thống điều khiển đảm bảo tính ổn định.
Để thiết kế bổ điều khiển cho hệ thống điều khiển x = f ( , x u) Ta chọn hàm Lyapnov
V= G(X) xác định dương….. …..
+Phương pháp điều khiển tối ưu LQR …….
+Phương pháp điều khiển trượt ……
+Phương pháp điều khiển thích nghi ……
Dòng cuối phần này viết 1 câu có ý:
Trong tiểu luận này sử dụng phương pháp “….” để tổng hợp bộ điều khiển cho đối tượng”….” tùy
từng đề tài tiểu luận.
Ví dụ: Trong tiểu luận này sử dụng phương điều khiển tối ưu LQR để tổng hợp bộ điều khiển cho
Lò Phản Ứng Hóa Học CSTR.
Chương 2 Tên tiểu luận “ …..” của nhóm nào thị viết vào đây
Ví dụ: Chương 2 Ứng dụng điều khiển phi tuyến cho Lò Phản Ứng Hóa Học CSTR
Trình bày chương theo cấu trúc:
- Giới thiệu về tiêu đề tiểu luận
Ví dụ “ Lò phản ứng bể khuấy liên tục (CSTR) là một thiết bị công nghiệp được sử dụng
rộng rãi trong các quá trình hóa học. Nó là một bình phản ứng trong đó các chất phản ứng được
đưa vào liên tục, trộn đều và sản phẩm được lấy ra liên tục. CSTR được sử dụng để thực hiện
các phản ứng hóa học ở quy mô công nghiệp, từ sản xuất hóa chất cơ bản đến các sản phẩm
phức tạp hơn….” Lên mạng tìm hiểu ví dụ sử dụng các công cụ AI
https://gemini.google.com/app. - Mô hình toán học.
Trình bày mô hình toán học đã cho trong đề ra của tiểu luận.
- Tổng hợp bộ điều khiển…. cho đối tượng.
Tất cả các kết quả công thức…. được trình bày trong chương này.
Chương 3. Mô phỏng và kiểm chứng kết quả “tên tiểu luận”
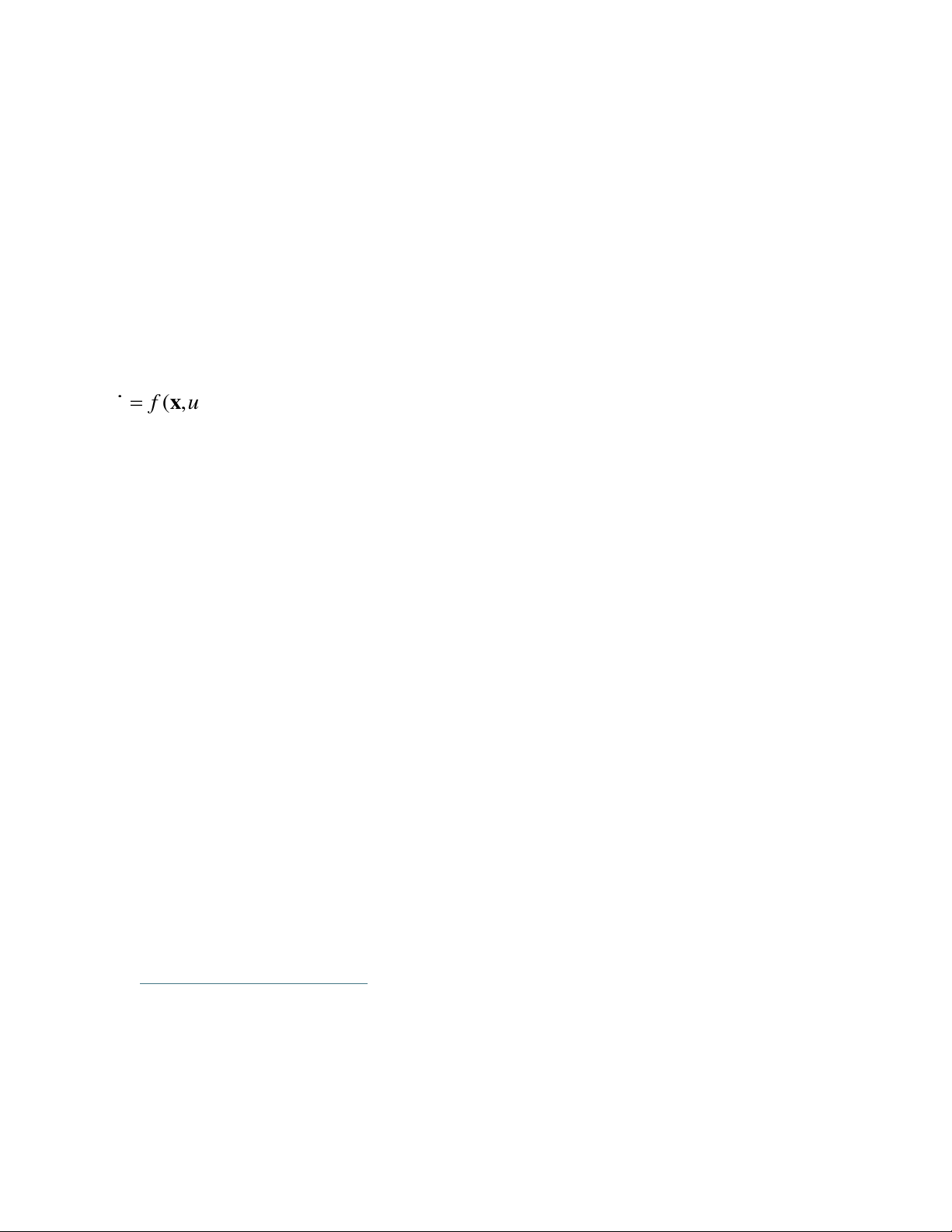
1. Sơ đồ mô phỏng matlab-simulink
Ví dụ: Sơ đồ đối tượng điều khiển matlab-simulink
Hình 1. Sơ đồ đối tượng điều khiển lò phản ứng liên tục
Sơ đồ hệ thống điều khiển matlab-simulink
Hình 2. Sơ đồ hệ thống điều khiển lò phản ứng liên tục
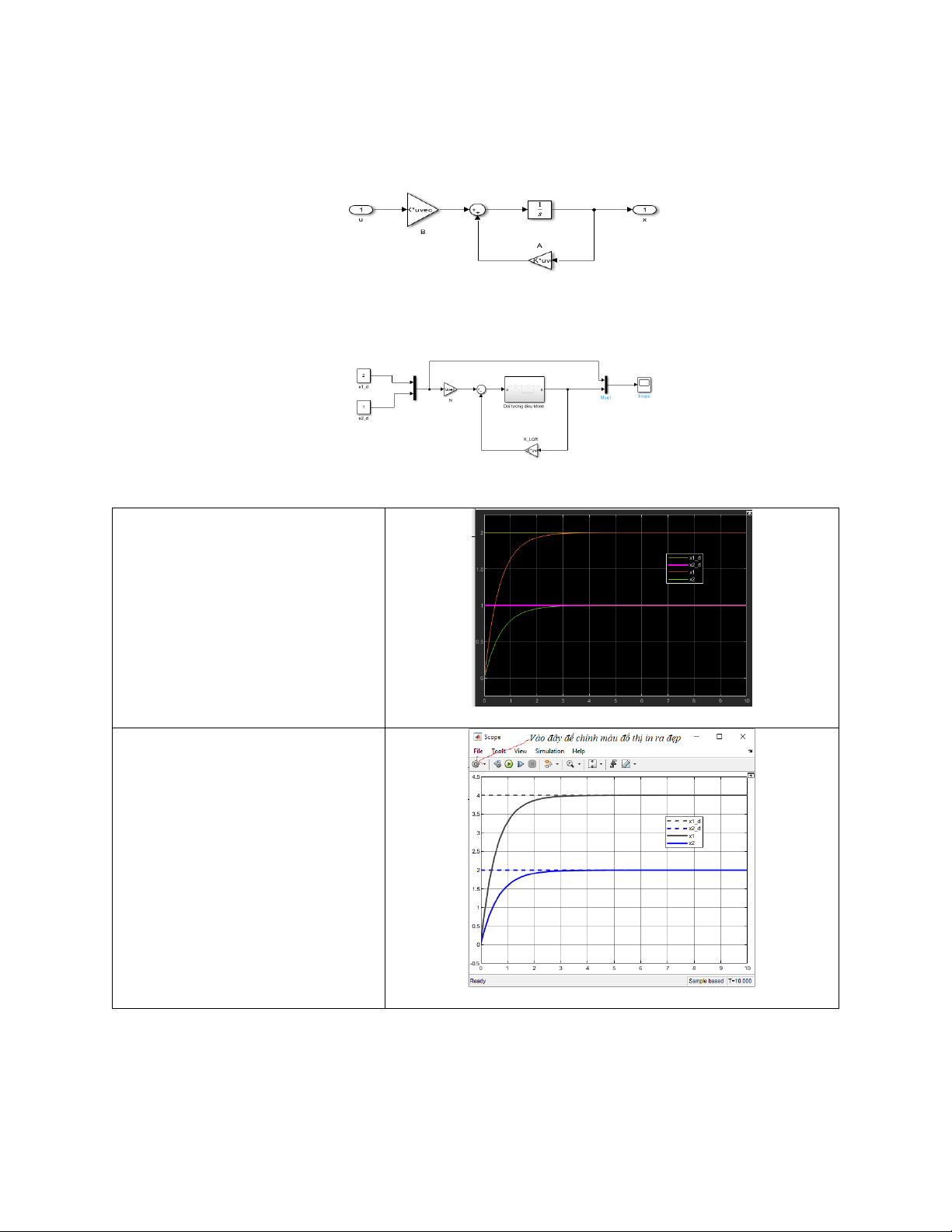
2. Kết quả các hình mô phỏng d
x x _ d 2 1 1 x = = = d d
x x _d 1 1 2
Hình 3 Kết quả bám tín hiệu đặt d
x x _ d 4 1 1 x = = = d d
x x _d 2 1 2
Hình 4 Kết quả bám tín hiệu đặt
Ít nhất 3 hình, cho ít nhất 3 tín hiệu đặt đầu vào x d
Bình luận kết quả mô phỏng ví dụ. Từ hình 3, hình 4 với bộ điều khiển LQR… ta thấy tín hiệu đầu
ra x bám chặt tín hiệu đặt mong muốn x , hệ thống có chất lượng đáp ứng yêu cầu….. d
( phần này chỉ trình bày sơ đồ, kết quả mô phỏng, không dẫn giải công thức) Phần kết luận:
Tóm tắt những việc đã làm ở trên, đánh giá hiệu quả của phương pháp, đưa ra các gợi ý cho các nghiên cứu tiếp theo.
Chú ý: Làm việc gì cũng phải đọc kỹ xem yêu cầu không thắc mắc khi chưa động não
+ Đọc kỹ các file thầy đã gửi trong nhóm
+ Mô hình toán học của mỗi tiểu luận thầy đã cho không phải xây dựng.