Ứng dụng cảm biến khoảng cách lên mô hình ô tô đo đạc khoảng cách cảnh báo va chạm | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Sử dụng sóng siêu âm: Cảm biến đo khoảng cách sử dụng sóng siêu âm để đo khoảng cách bằng cách phát ra một tín hiệu sóng và đo thời gian mà sóng này mất để quay trở lại. Tài liệu được sưu tầm gồm 14 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: công nghệ kỹ thuật cơ điện tử 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:





Preview text:
lOMoAR cPSD| 58675420
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐÀO TẠO CHẤT LƯỢNG CAO
BỘ MÔN CẢM BIẾN VÀ CƠ CẤU CHẤP HÀNH BÁO CÁO CUỐI KỲ
ĐỀ TÀI : ỨNG DỤNG CẢM BIẾN KHOẢNG
CÁCH LÊN MÔ HÌNH Ô TÔ ĐO ĐẠC
KHOẢNG CÁCH CẢNH BÁO VA CHẠM GVHD : T.S Hà Lê Như Thành SVTH
: Phạm Ngọc Thái - 21146152
Nguyễn Văn Xuân Quí - 21146141 Kiều Anh Tuấn - 21146529 Năm học : 2022 – 2023
TP. HCM , tháng 5 /2023 lOMoAR cPSD| 58675420 1 MỤC LỤC
PHẦN 1 : TỔNG QUAN.............................................................................................3 1.1
Định nghĩa.......................................................................................................4
1.2 Các nguyên lý của cảm biến.............................................................................4
PHẦN 2: THỰC NGHIỆM TRÊN CẢM BIẾN ......................................................6
2.1. Giới thiệu về cảm biến......................................................................................6
2.2. Các thông số kỹ thuật.......................................................................................8
PHẦN 3: KẾT QUẢ THỰC NGHIỆM.....................................................................9
3.1. Bảng thông số thực nghiệm............................................................................10
3.2. Bảng sai số dựa trên thực nghiệm.................................................................10
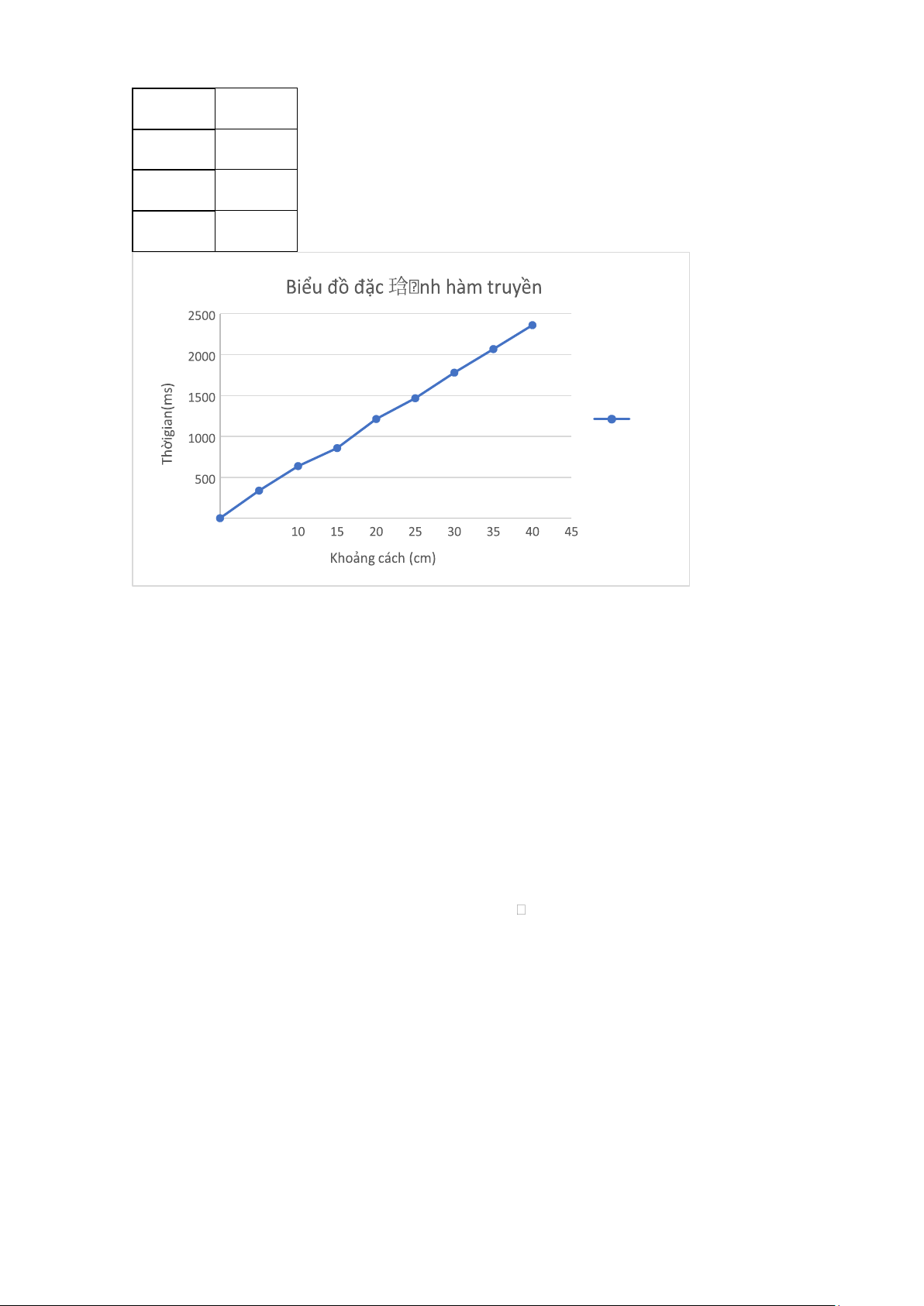
3.3. Biểu đồ đường đặc tính hàm truyền..............................................................11
PHẦN 4 : ỨNG DỤNG CẢM BIẾN.........................................................................11
4.1 Giới thiệu về mô hình ứng dụng cảm biến......................................................11
4.2 Ứng dụng của cảm biến trong mô hình...........................................................13
4.3 Thực nghiệm điều khiển...................................................................................13
PHẦN 5 : KẾT LUẬN VÀ ĐỀ XUẤT......................................................................15 5.1
Đánh giá kết quả...........................................................................................15 5.2
Đánh giá các phương pháp đo đạc..............................................................15
5.3 Phương án khắc phục sai số..........................................................................15 lOMoAR cPSD| 58675420
Phần 1 Tổng quan các nguyên lý chế tạo cảm biến cảm
biến đo khoảng cách
1. Các nguyên lý cơ bản của cảm biến đo khoảng cách 1.
Sử dụng sóng siêu âm: Cảm biến đo khoảng cách sử dụng sóng siêu âm
để đo khoảng cách bằng cách phát ra một tín hiệu sóng và đo thời gian mà sóng
này mất để quay trở lại. 2.
Sử dụng tia laser : Các cảm biến đo khoảng cách sử dụng tia laser để đo
khoảng cách. Tia laser phát ra một tia sáng và sử dụng cảm biến để đo thời gian
mà tia sáng mất để quay trở lại. lOMoAR cPSD| 58675420
Tốc độ của ánh sáng laser là khoảng 299,792,458 mét mỗi giây hoặc xấp xỉ
299,8 triệu mét mỗi giây. 3.
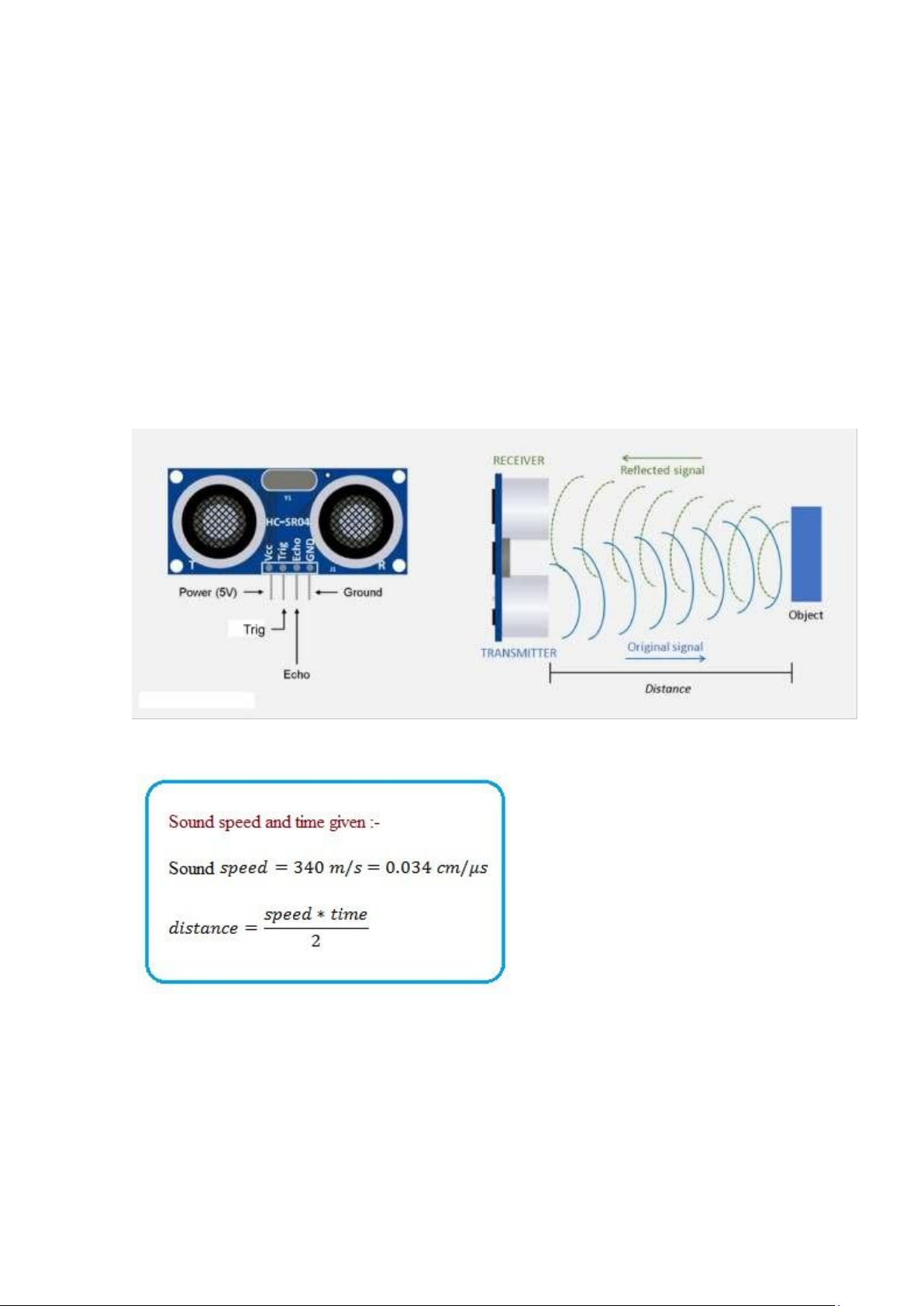
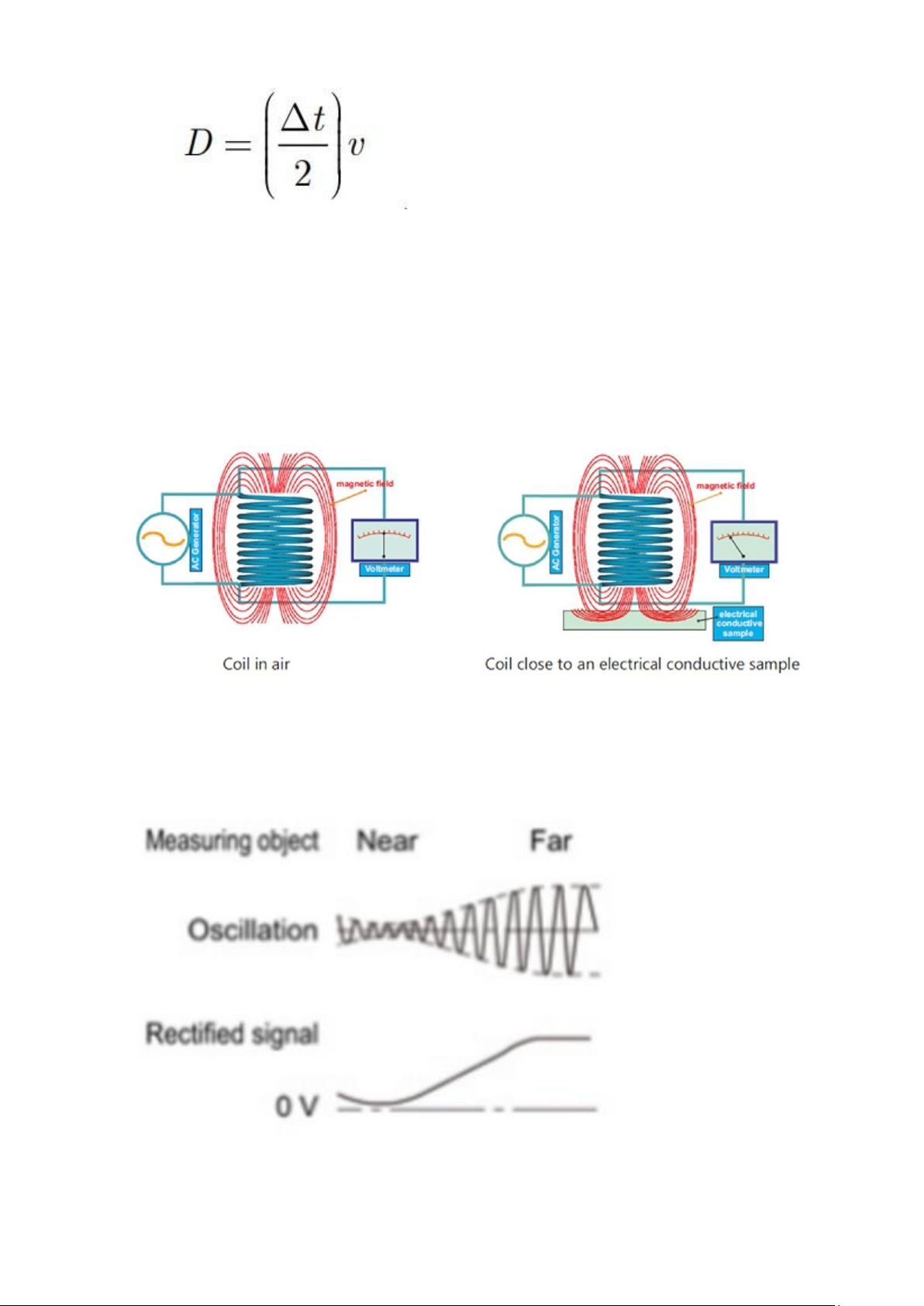
Sử dụng sự thay đổi của từ trường: cuộn dây điện từ sẽ tạo ra vùng từ
trường biến thiên nằm ở đầu cảm biến, nếu có một vật bằng kim loại nằm trong
vùng đường sức của từ trường, trong kim loại sẽ hình thành dòng điện xoáy,
dòng điện xoáy này tạo ra từ trường mới ngược với từ trường ban đầu, làm cho
biên độ dao động của từ trường giảm
Mạch trigger có nhiệm vụ giám sát biên độ dao động của từ trường, nếu có sự thay
đổi về biên độ từ trường, mạch trigger sẽ tác động đến output, làm thay đổi trạng thái ngõ ra của tải 4.
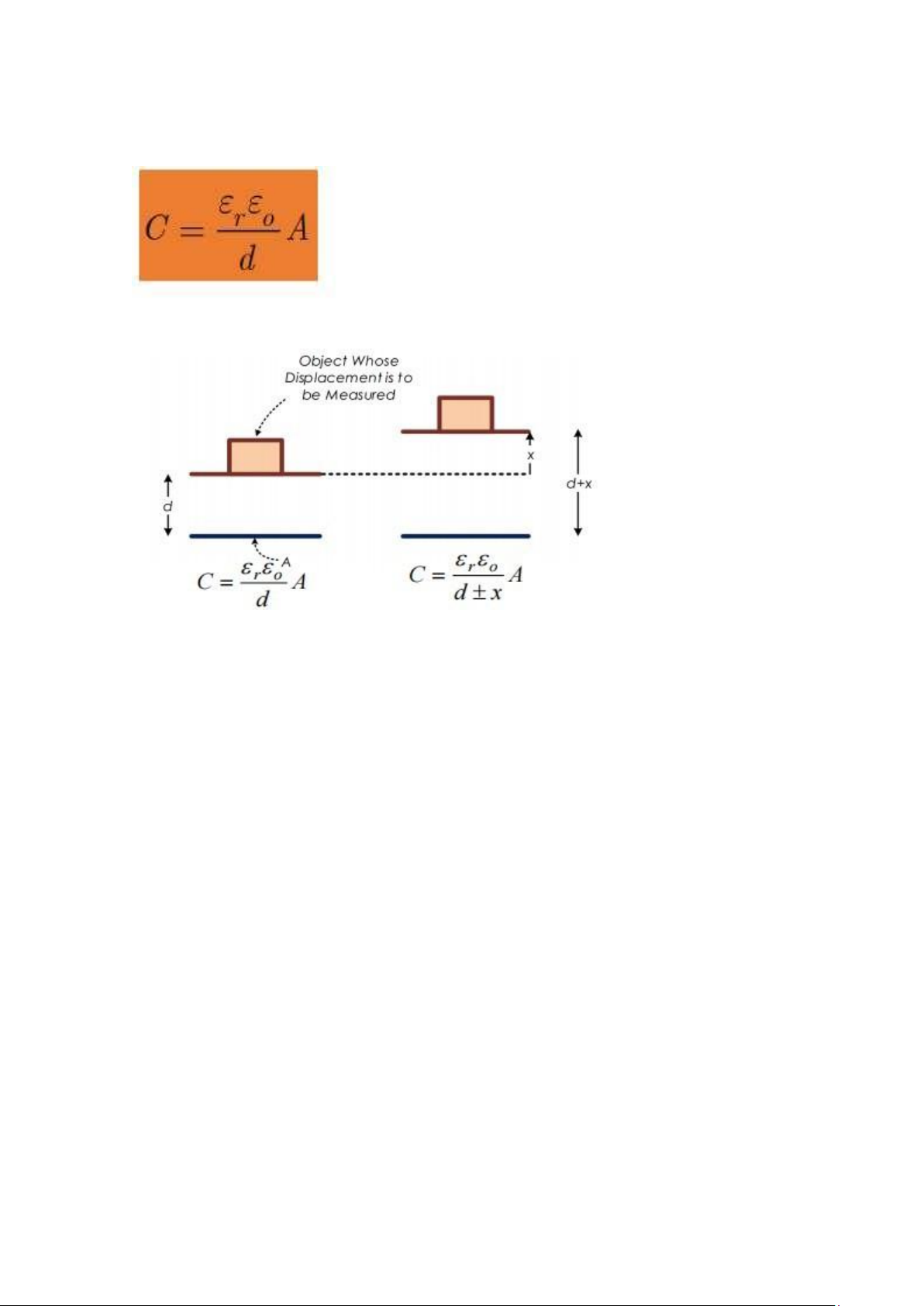
Dựa trên sự thay đổi của điện dung : nguyên lý hoạt động cơ bản của cảm
biến điện dung dựa trên việc đánh giá sự thay đổi điện dung của tụ điện. Bất kì
vật nào đi qua trong vùng nhạy của cảm biến điện dung thì điện dung của tụ lOMoAR cPSD| 58675420
điện sẽ thay đổi. Sự thay đổi điện dung này phụ thuộc vào khoảng cách, kích
thước và hằng số điện môi của vật liệu.Điện dung thay đổi thì dung kháng sẽ
thay đổi theo thì vật được phát hiện
Sự thay đổi điện dung này phụ thuộc vào khoảng cách vật tới cảm biến: Khi
khoảng cách của vật càng ra xa thì điện dung giảm đi
Các nguyên lý này đều đóng vai trò quan trọng trong việc đo khoảng cách
và các ứng dụng thực tế của các cảm biến đo khoảng cách.
PHẦN 2 : LÀM THỰC NGHIỆM TRÊN CẢM BIẾN
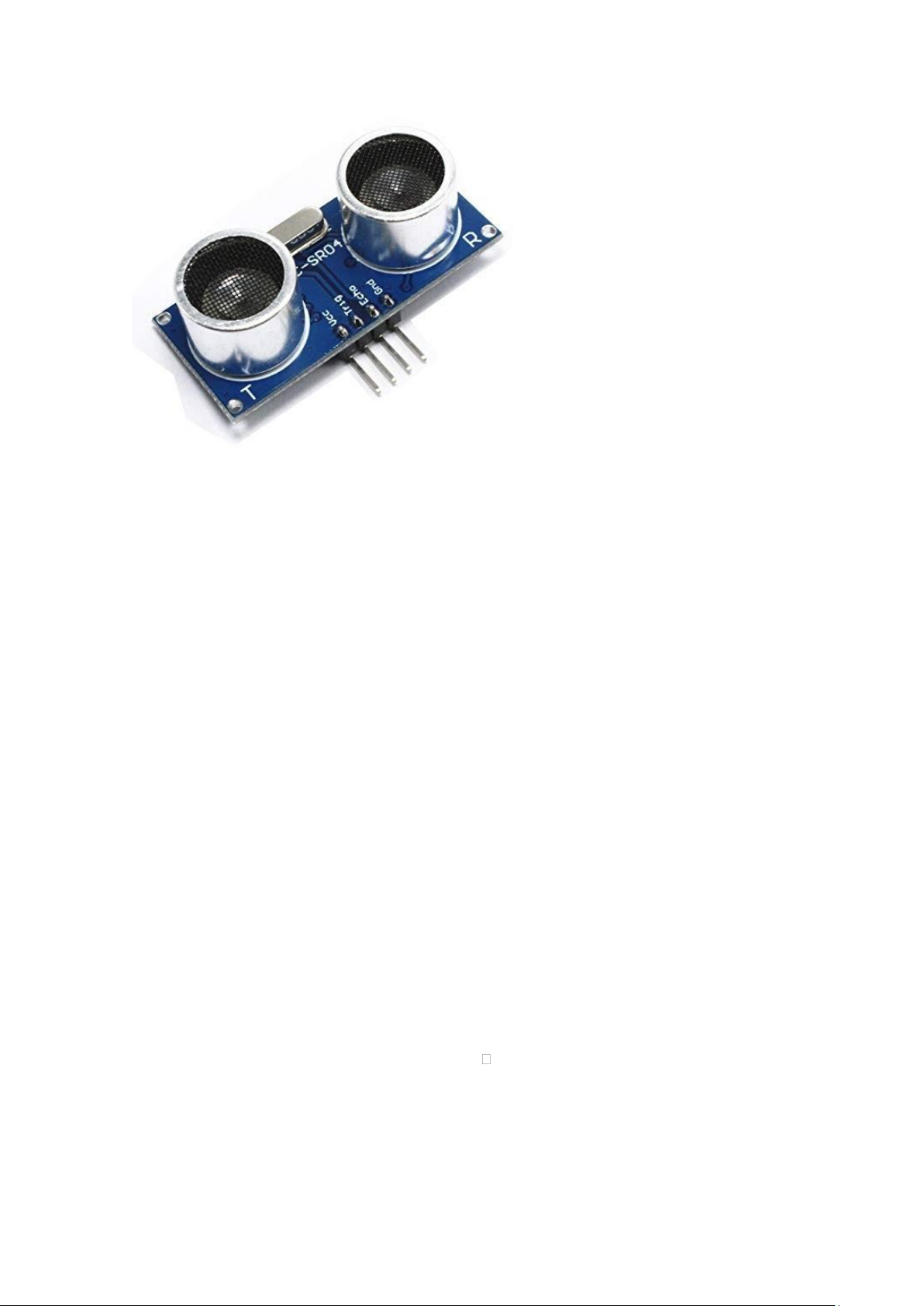
SIÊU ÂM : cảm biến siêu âm HC-SR04
2.1. Giới thiệu về cảm biến
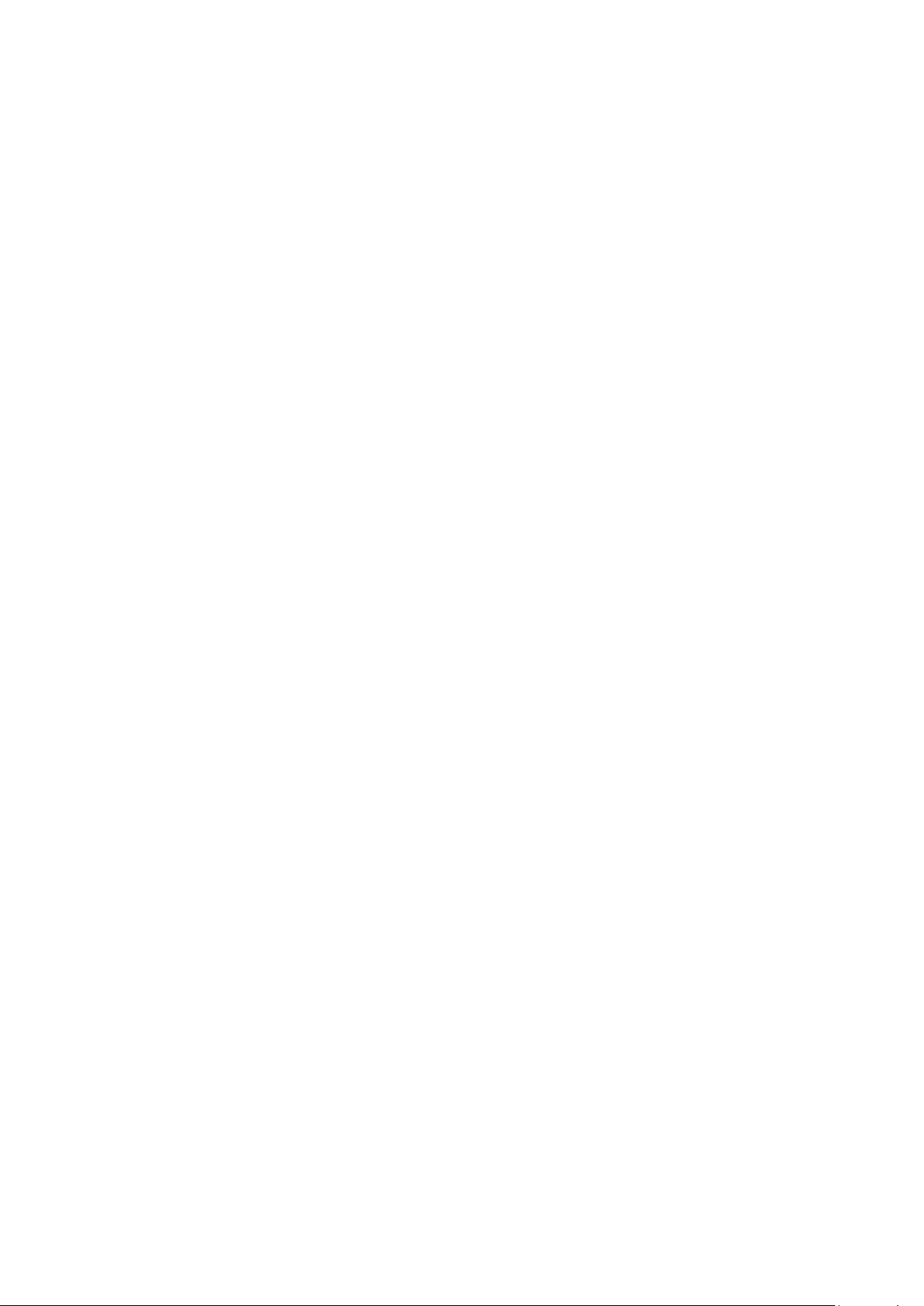
Cảm biến siêu âm HC-SR04 hoạt động dựa trên nguyên lý phát ra sóng siêu âm
và đo thời gian cho đến khi sóng phản chiếu quay trở lại.
Để đo khoảng cách bằng cảm biến siêu âm HC-SR04, ta sẽ phát 1 xung rất ngắn
(5 microSeconds) từ chân Trig. Tiếp theo, 1 xung HIGH ở chân Echo sẽ được
cảm biến tạo ra và phát đi lan truyền với tốc độ 340m/s trong không khí cho đến
khi nhận lại được sóng phản xạ ở chân này. Lúc này, độ rộng của xung sẽ bằng
với thời gian sóng siêu âm được phát từ cảm biến và phản xạ lại tính toán
khoảng cách giữa cảm biến và vật thể.
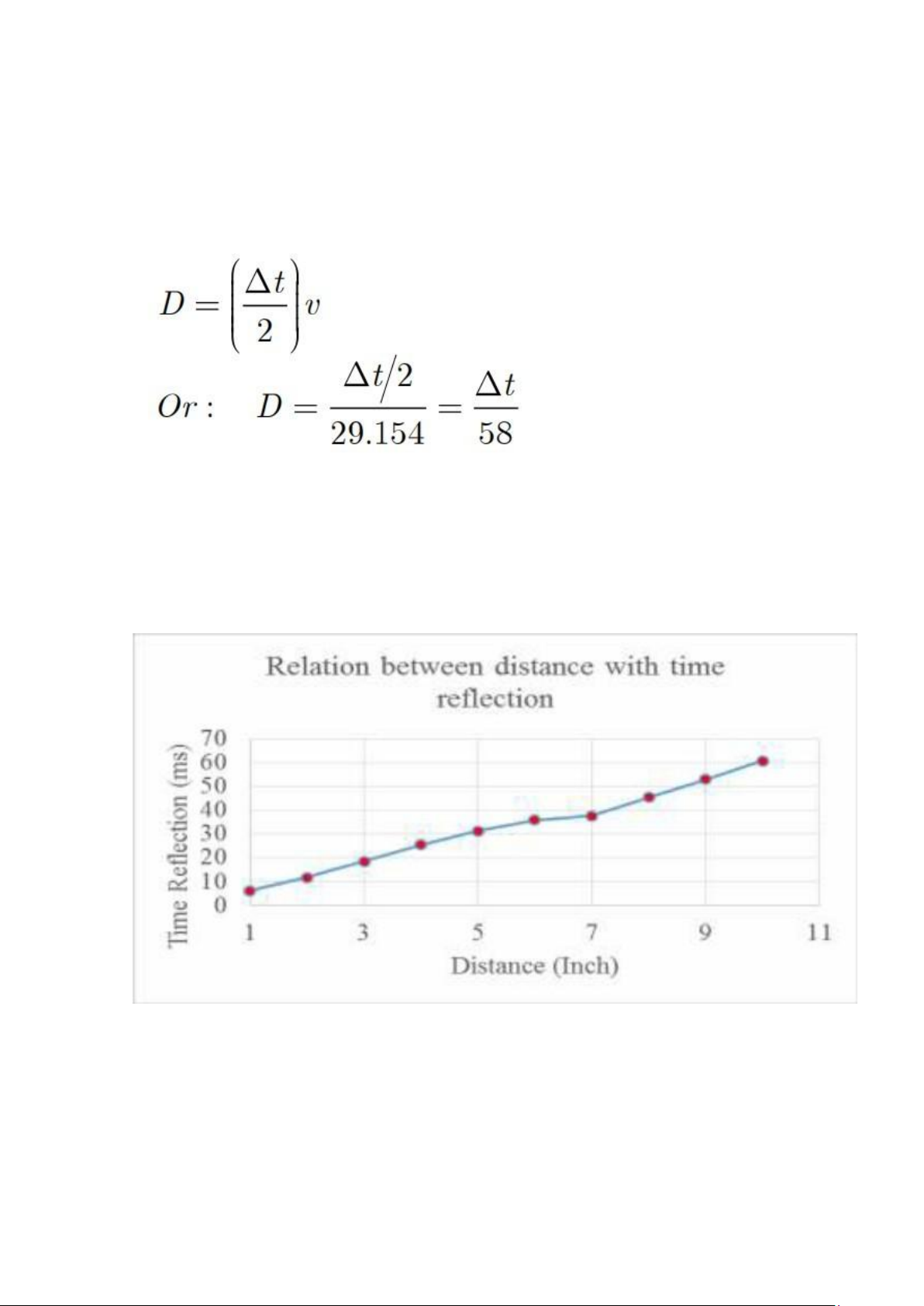
Để tính toán khoảng cách, ta có thể sử dụng công thức: lOMoAR cPSD| 58675420
Ghi chú: 343m / s = 0,0343 cm / us hoặc âm thanh sẽ
mất 29.145us để di chuyển một cm.
Do đó, chúng ta có hai phương pháp để tính toán một khoảng cách D:
- Biểu đồ mối quan hệ giữa thời gian tra về và khoảng cách
Cảm biến siêu âm có thể đo khoảng cách tuyến tính hoặc phi tuyến tùy thuộc
vào loại cảm biến. Tuy nhiên, cảm biến siêu âm đo khoảng cách tuyến tính phổ biến hơn. lOMoAR cPSD| 58675420
Tín hiệu đầu ra của cảm biến siêu âm HC-SR04 là một xung tín hiệu có độ dài
tương ứng với khoảng cách đo được. Nó là một xung tín hiệu có tần số cao, với
độ dài ở khoảng thời gian tính bằng micro giây. Cụ thể, tín hiệu đầu ra được mô tả như sau:
- Khi bạn cấu hình đúng cảm biến và kích hoạt nó, đầu ra sẽ chuyển từ mức
thấp (LOW) lên mức cao (HIGH) trong khoảng thời gian 10 micro giây.
- Sau đó, cảm biến bắt đầu phát sóng bức xạ siêu âm và chờ đợi cho đến khi
sóng siêu âm được phản xạ lại.
- Khi sóng siêu âm phản xạ trở lại, đầu ra của cảm biến sẽ chuyển từ mức
cao (HIGH) xuống mức thấp (LOW). Độ dài của tín hiệu này tương ứng
với khoảng cách đo được, và được tính bằng thời gian từ lúc
phát sóng đến lúc phát hiện sóng phản chiếu.
- Thời gian này được tính bằng micro giây và có thể được chuyển đổi sang
đơn vị khoảng cách tương ứng (thường là đơn vị cm hoặc inch) bằng cách
áp dụng công thức: khoảng cách = thời gian x vận tốc sóng âm / 2.
- Nếu không phát hiện được sóng siêu âm phản xạ trong thời gian nhất định
(thường là khoảng 38ms), cảm biến sẽ tự động chuyển đầu ra về mức thấp (LOW).
Cảm biến siêu âm thường được thiết kế với dải đo khoảng cách khác nhau, phù
hợp với các ứng dụng khác nhau. Tuy nhiên, thông thường dải đo khoảng cách
của cảm biến siêu âm nằm trong khoảng từ vài cm đến vài mét. Ví dụ, một số
cảm biến siêu âm thông dụng có dải đo khoảng cách từ 2 cm đến 450 cm.
Sai số cảm biến siêu âm đo khoảng cách phụ thuộc vào nhiều yếu tố khác nhau
như chất liệu vật thể, nhiệt độ môi trường, áp suất, độ ẩm, độ chính xác của cảm
biến và các yếu tố khác. Tuy nhiên, thông thường sai số của cảm biến siêu âm đo
khoảng cách là khoảng 1-2cm. Các công nghệ tiên tiến hơn hiện nay có thể đạt
được sai số thấp hơn nhưng thường có giá thành cao hơn.
Độ nhạy cảm biến siêu âm đo khoảng cách phụ thuộc vào nhiều yếu tố như chất
liệu, kích thước và hình dạng của đối tượng cần đo, đặc tính của cảm biến và
thông số kỹ thuật của thiết bị điều khiển. Tuy nhiên, hầu hết các biến siêu âm có
độ nhạy trong khoảng từ vài mm đến vài cm và có thể chính xác đo được
khoảng cách từ vài mm đến vài m đối với các đối tượng khác nhau. 2.2. Các thông số kỹ thuật lOMoAR cPSD| 58675420
Module cảm biến có 4 chân: •
Chân VCC: Dùng để cấp nguồn 5v •
Chân Trig: Chân digital output •
Chân Echo: Chân digital input • Chân GND: Chân 0v
Trước khi đi vào tìm hiểu các phần tiếp theo của dòng cảm biến này, chúng ta cùng điểm
qua một vài thông số kỹ thuật nổi bật của cảm biến siêu âm HC-SR04 như sau: • Model: HC-SR04 • Điện áp làm việc: 5VDC • Dòng điện: 15mA • Tần số: 40 KHZ •
Khoảng cách phát hiện: 2cm – 4m
Góc cảm biến: Không quá 15 độ. •
Độ chính xác cao: Lên đến 3mm •
Chế độ kết nối: VCC / Trig (T-Trigger) / Echo (R-Receive) / GND lOMoAR cPSD| 58675420
Phần 3 : KẾT QUẢ THỰC NGHIỆM
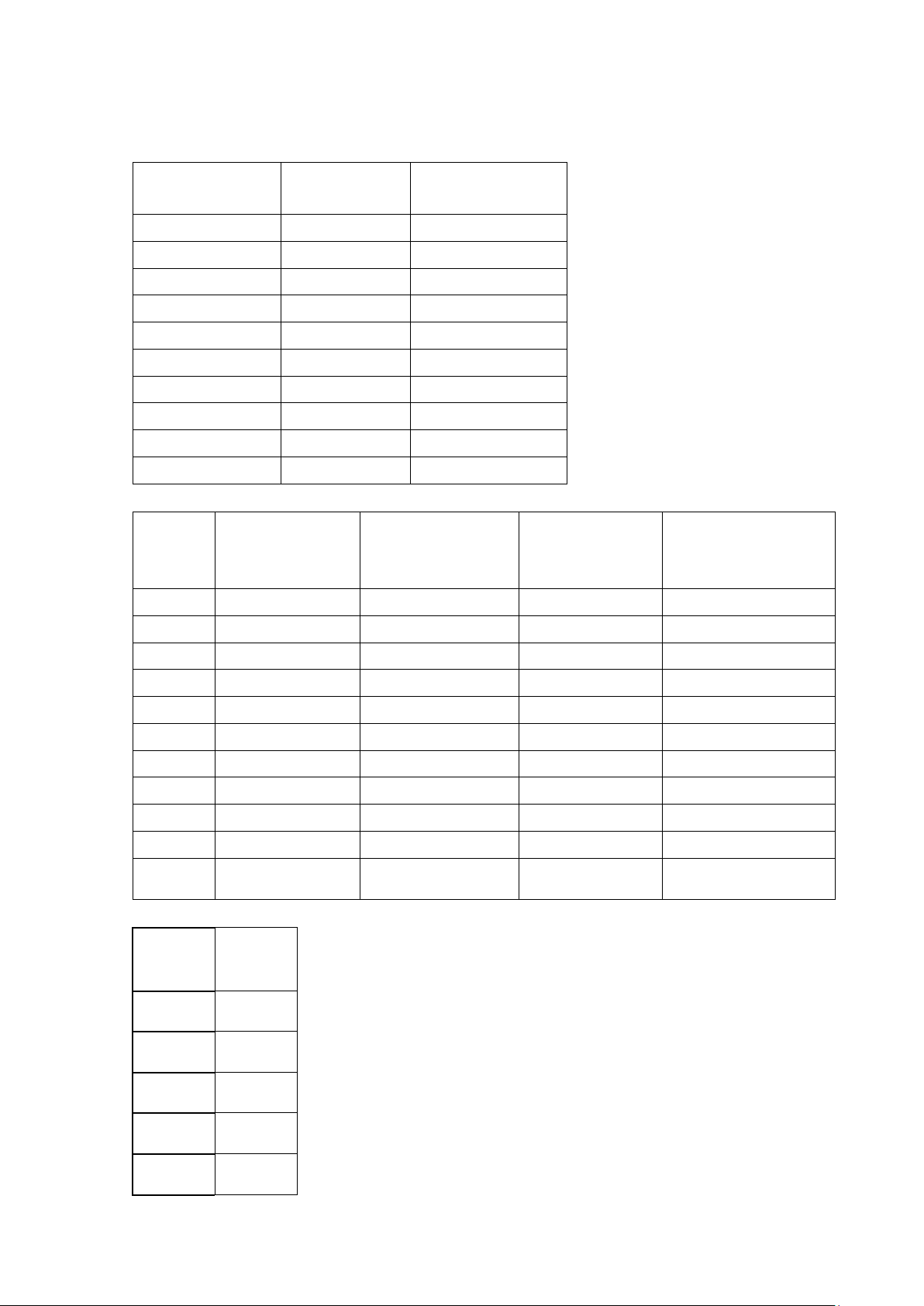
3.1. Bảng thông số thực nghiệm Các lần đo Số liệu thực Số liệu cảm biến tế (cm) đo được (cm) 1 5 4.73 2 10 9.59 3 15 14.81 4 20 19.61 5 25 24.72 6 30 29.86 7 35 34.56 8 40 39.45 9 45 44.67 10 50 49.42 3.2 Bảng sai số Các lần Số liệu cảm Số liệu thực tế
Sai số giữa các Phần trăm sai số đo biến đo được (cm) lần đo (%) (cm) 1 9.53 10 0.47 4.7 2 9.65 10 0.35 3.5 3 9.67 10 0.33 3.3 4 10.11 10 -0.11 1.1 5 9.34 10 0.66 6.6 6 9.78 10 0.22 2.2 7 9.94 10 0.06 0.6 8 10.21 10 0.21 2.1 9 9.87 10 0.13 1.3 10 9.92 10 0.08 0.8 Tổng 0.24 2.4
3.3 Biểu đồ thực nghiệm thể hiện đặc tính hàm truyền Khoảng Thời cách(cm) gian (ms) 0 0 5 337 10 637 15 857 20 1212 lOMoAR cPSD| 58675420 25 1466 30 1779 35 2067 40 2359 Series2 0 0 5
PHẦN 4 : ỨNG DỤNG CẢM BIẾN VÀO Ô TÔ ĐO KHOẢNG CÁCH
4.1 Giới thiệu về mô hình ứng dụng cảm biến
4.1.1 Cấu tạo của mô hình • Khung xe robot 3 bánh •
Arduino UNO R3 SMD chip dán (kèm cáp) •
Mạch Điều Khiển Động Cơ DC L298N Cảm Biến Siêu Âm HC- SR04 •
Đế module cảm biến siêu âm HC-SR04 •
Động cơ servo SG90 180 độ •
Hộp Pin 18650 2 cell có nắp và công tắc • Pin cell 18650 2000mAh x2 • Jack DC đực có dây •
Dây Cắm Test Board Đực Đực 30cm ( 10 sợi ) •
Dây Cắm Test Board Đực Cái 30cm ( 20 sợi ) lOMoAR cPSD| 58675420
4.1.2. Thông số chi tiết : - Khung xe :
+ Bánh xe 65mm (2 cái) + 1 bánh xe dẫn động
+ 2 Đông cơ có hộ p giảm tốc ̣ , mức điện áp hoạt đông 3 –
6Ṿ + Kích thước của khung xe 3 bánh là 220×150mm. - Arduino Uno R3
+ 2 chân Serial: 0 (RX) và 1 (TX): dùng để gửi (transmit – TX) và nhận
(receive – RX) dữ liệu TTL Serial. Arduino Uno có thể giao tiếp với thiết bị
khác thông qua 2 chân này.
+ Chân PWM (~): 3, 5, 6, 9, 10, và 11: cho phép bạn xuất ra xung PWM
với độ phân giải 8bit (giá trị từ 0 → 28-1 tương ứng với 0V → 5V)
+ LED: Có 1 LED được tích hợp trên bảng mạch và được nối vào chân D13.
Khi chân có giá trị mức cao (HIGH) thì LED sẽ sáng và LED tắt khi ở mức thấp (LOW).
+ VIN: Chân này dùng để cấp nguồn ngoài (điện áp cấp từ 7-12VDC).
+ 5V: Điện áp ra 5V (dòng điện trên mỗi chân này tối đa là 500mA).
+ 3V3: Điện áp ra 3.3V (dòng điện trên mỗi chân này tối đa là 50mA).
+ GND: Là chân mang điện cực âm trên board.
+ IOREF: Điệp áp hoạt động của vi điều khiển trên Arduino UNO và có
thể đọc điện áp trên chân IOREF. Chân IOREF không dùng để làm chân cấp nguồn.
+ 32 KB bộ nhớ Plash: trong đó bootloader chiếm 0.5KB.
+ 2 KB cho SRAM: (Static Random Access Menory): giá trị các biến khai
báo sẽ được lưu ở đây.
+ 1 KB cho EEPROM: (Electrically Eraseble Programmable Read Only
Memory): Là nơi có thể đọc và ghi dữ liệu vào đây và không bị mất dữ liệu khi mất nguồn.
+ Trên Board Arduino Uno có 14 chân Digital được sử dụng để làm chân
đầu vào và đầu ra và chúng sử dụng các hàm pinMode(), digitalWrite(),
digitalRead(). Giá trị điện áp trên mỗi chân là 5V, dòng trên mỗi chân là
20mA và bên trong có điện trở kéo lên là 20-50 ohm. Dòng tối đa trên mỗi
chân I/O không vượt quá 40mA để tránh trường hợp gây hỏng board mạch.
- Module điều khiển động cơ L298
+ Driver: L298N tích hợp hai mạch cầu H.
+ Điện áp điều khiển: +5 V ~ +35 V
+ Dòng tối đa cho mỗi cầu H là: 2A
+ Điện áp của tín hiệu điều khiển: +5 V ~ +7 V
+ Dòng của tín hiệu điều khiển: 0 ~ 36mA lOMoAR cPSD| 58675420
+ Công suất hao phí: 20W (khi nhiệt độ T = 75 ℃)
+ Nhiệt độ bảo quản: -25 ℃ ℃ ~ +130
+ 12V power, 5V power: là 2 chân cấp nguồn trực tiếp đến động cơ .
+ Power GND : là chân GND cấp nguồn cho động cơ
+ 2 Jump A enable và B enable dùng cho phép động cơ chạy hoặc dừng
+ IN1, IN2, IN3, IN4: Là 4 chân input , chức năng nhận tín hiệu từ vi
điều khiển hoặc Arduino để điều khiển động cơ
+ Output A: nối với động cơ A
- Động cơ DC giảm tốc
+ Điện áp hoạt động: 3V~ 9V DC (Hoạt động tốt nhất từ 6 – 8V)
+ Dòng không tải: 70mA (250mA MAX)
+ Mômen xoắn cực đại: 800gf cm min 1:48 (3V)
+ Tốc độ không tải: 125 Vòng/ 1 Phút (3V) (Với bánh 66mm: 26m/1p) 208 Vòng/ 1 Phút (5V) (Với bánh 66mm: 44m/1p)
- Động cơ servo SG90
+ Điện áp hoạt động: 4.8-5VDC
+ Tốc độ: 0.12 sec/ 60 deg (4.8VDC) + Lực kéo: 1.6 Kg.cm + Kích thước: 21x12x22mm
- Cảm biến siêu âm HC-SR04
+ Điện áp làm việc: 5V DC
+ Dòng điện hoạt động: 15mA
+ Tần số hoạt động: 40 KHZ
+ Khoảng cách phát hiện: 2cm - 4m
+ Tín hiệu đầu ra: mức cao 5V, mức thấp 0V.
+ Góc cảm biến: Không quá 15 độ.
+ Độ chính xác cao: Lên đến 3mm
+ Chế độ kết nối: VCC / Trig (T-Trigger) / Echo (R-Receive) / GND
4.2 Ứng dụng của cảm biến trong mô hình
- Cảm biến được gắn cùng với động cơ Servo ở đầu xe định hướng các hướng
quay để đo được khoảng cách các hướng đi để đưa ra quyết định chính xác cho xe. -
Thiết bị cảm biến siêu âm được gắn vào đầu và đuôi xe để đo khoảng cách và báo
hiệu khi xe di chuyển gần đến các vật cản. Cụ thể, khi sử dụng, thiết bị này sẽ tạo ra lOMoAR cPSD| 58675420
các tia sóng hình nón để đo khoảng cách giữa các phương tiện hoặc chướng ngại vật
đang đứng yên hay di chuyển
4.3 Thực nghiệm điều khiển
- Sử dụng vật cản và thước đo ở các mức 5cm, 10cm, 15cm, 20cm ta thu được số liệu
mà cảm biến đo được khoảng cách như sau : + 5cm :
20:45:36.862 -> Distance: 4.73cm
20:45:36.862 -> Distance: 4.73cm
20:45:36.895 -> Distance: 4.62cm
20:45:36.895 -> Distance: 4.73cm
20:45:36.928 -> Distance: 4.73cm
20:45:36.928 -> Distance: 4.73cm
20:45:36.961 -> Distance: 4.62cm
20:45:36.961 -> Distance: 4.73cm + 10cm
20:47:31.261 -> Distance:9.59cm
20:47:31.294 -> Distance:9.59cm
20:47:31.327 -> Distance: 9.42cm
20:47:31.327 -> Distance: 9.42cm
20:47:31.359-> Distance:9.59cm
20:47:31.359 -> Distance:9.47cm
20:47:31.394 -> Distance: 9.49cm
20:47:31.394-> Distance:9.59cm
20:47:31.427 -> Distance:9.59cm + 15cm
20:48:24.404-> Distance:14.69cm
20:48:24.404-> Distance:14.69cm
20:48:24.438 -> Distance: 14.69cm
20:48:24.438 -> Distance: 14.79cm
20:48:24.471 -> Distance: 14.69cm
20:48:24.504 -> Distance: 14.69cm
20:48:24.504 -> Distance: 14.69cm
20:48:24.537 -> Distance: 14.69cm
20:48:24.537 -> Distance: 14.69cm
20:48:24.570-> Distance: 14.69cm
20:48:24.570 -> Distance: 14.79cm + 20cm
20:50:35.364 -> Distance: 19.79cm
20:50:35.364 -> Distance: 19.77cm
20:50:35.397-> Distance:19.77cm
20:50:35.430 -> Distance:19.79cm
20:50:35.430 -> Distance: 19.79cm
20:50:35.463-> Distance:19.79cm
20:50:35.463-> Distance: 19.62cm
20:50:35.497 -> Distance: 19.72cm
20:50:35.497 -> Distance:19.72cm
20:50:35.531 -> Distance: 19.72cm lOMoAR cPSD| 58675420
20:50:35.563 -> Distance:19.62cm
20:50:35.563 -> Distance: 19.72cm
PHẦN 5 : KẾT LUẬN VÀ ĐỀ XUẤT
5.1 Đánh giá kết quả
- Cảm biến siêu âm được sử dụng để đo khoảng cách, chuẩn đoán hình ảnh,
đo mức nước,... với độ chính xác gần như tuyệt đối. Đặc biệt, trong lĩnh vực
ô tô, cảm biến này còn hỗ trợ người điều khiển phát hiện chướng ngại vật
và lùi xe một cách an toàn trong quá trình di chuyển hay dừng, đỗ. - Cần cải
thiện độ nhiễu tín hiệu của cảm biến siêu âm.
5.2Đánh giá các phương pháp đo đạc
- Phương pháp đo chưa chính xác - Sai số là do:
+ Lỗi phát sóng âm đo của cảm biến
+ Do địa hình đặt cảm biến
+ Do vật để cảm biến phát hiện quá nhỏ
5.3 Phương án khắc phục sai số
Điểm hạn chế của máy
Hiện tại ROBOT còn 1 số nhược điểm như:
- Độ ổn định của hệ thống chưa tốt
- Môi trường đo có nhiều vật cản nhỏ khiến nhiễu tín hiệu đưa ra không chính xác - ...
Hướng phát triển của ROBOT
- Thay cảm biến khác khi bị lỗi.
- Sử dụng bề mặt phẳng để đặt cảm biến
- Sử dụng vật đủ lớn để cảm biến đễ dàng nhận được
Tài liệu liên quan:
-

Tin học trong kỹ thuật
40 20 -

Fuzzy PID Control of a Five DOF Robot Arm: A Comprehensive Study | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
125 63 -

Improved Geometric Algorithm for Indoor Localization | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
116 58 -

Thực Tập: Trạm Đóng Nắp Tự Động Hóa | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
89 45