Bài báo cáo môn Hệ thống truyền động Servo đề tài "Mô phỏng DC servo motor"
Bài báo cáo môn Hệ thống truyền động Servo đề tài "Mô phỏng DC servo motor" của Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh với những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã học vào thực tiễn cuộc sống. Mời bạn đọc đón xem!
Môn: Mechatronic Servo System Control (SERV334029) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:

















Preview text:
lOMoARcPSD| 37054152
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA ĐÀO TẠO CHẤT LƯỢNG CAO BÁO CÁO
MÔN HỌC: HỆ THỐNG TRUYỀN ĐỘNG SERVO
Project: Mô phỏng DC servo motor
GVGD: THS. VÕ LÂM CHƯƠNG NHÓM 11: TV:Nguyễn Đặng Triều 19146284 Nguyễn Thanh Tùng 19146052 Wang Nam Trí 19146282
Tp. Hồ Chí Minh, ngày 3 tháng 12 năm 2021 1 lOMoARcPSD| 37054152 Mục lục
1. Thông số của động cơ:..............................................................................................2
2. Tải 1 ( NL = 4 , EL = 0.01):.............................................................................4 2.1
Bậc 4:.................................................................................................................4 2.2
Bậc 1:.................................................................................................................9 2.3
Bậc 2:...............................................................................................................11
3. Tải 2 ( NL = 7 , EL = 0.01 , KL=280 ):.......................................................16 3.1
Bậc 4:...............................................................................................................16 3.2
Bậc 1:...............................................................................................................20 3.3
Bậc 2:...............................................................................................................24
4. Kết luận:.................................................................................................................28 lOMoARcPSD| 37054152 1.
Thông số của động cơ: Group Series Brand 11 MT-2250-B Baldor Hình 1
Từ bảng thông số của động cơ thì ta chọn KL = 280 theo bảng sau: lOMoARcPSD| 37054152
Hình 2: Bảng thông số khớp nốai mềm thường dùng cho động cơ DC servo motor Ta có các điều kiện : JL 3≤ NL= 2≤10 NG .JM 0≤EL≤0.02
= > Để hệ servo đáp ứng nhanh và không bị dao động. 2.
Tải 1 ( NL = 4 , EL = 0.01):
- JM = 0,54 kg. cm2 = 0,54. 10−4 kg. m2 (Tìm thấy ở bảng thông số )
Với điều kiện ràng buộc ban đầu:
Chọn NL = 4 , EL = 0.01: lOMoARcPSD| 37054152
- NG = 1 (hệ số giảm tốc) Ta có: 2 = JL
. JM = 4.1. 0,54. 10−4 = 2,16. 10−4 - NL 2 => JL = NL . NG NG .JM kg . m2 - ωL = = = 1138,55 rad/s - EL = L 2√JL.KL 2.1 Bậc 4: D => DL = 0.0049 -Tốc độ cao: V
V = 600 rpm => chọn V = 63 rad/s 0
Hệ bậc 4 nên chọn : {CCPv==00,,2482 => - {KKP L { P v==CCPv.ω.ωL
KKv ==933,6111273,252 JL −4 kg . m2 - JT = JM + 2 = 2,7. 10 NG
- Kgv = Kv . JT = 0.2521 lOMoARcPSD| 37054152 a)
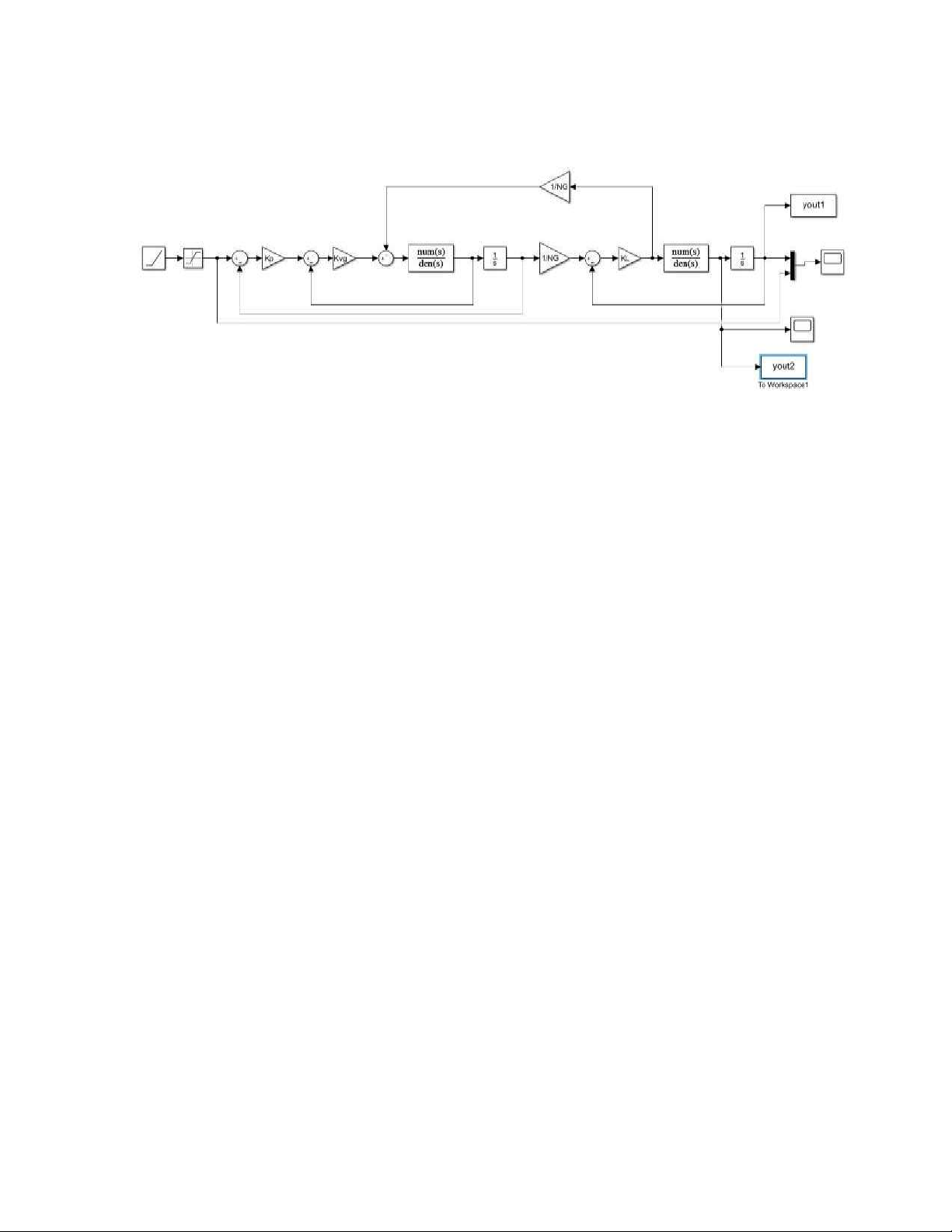
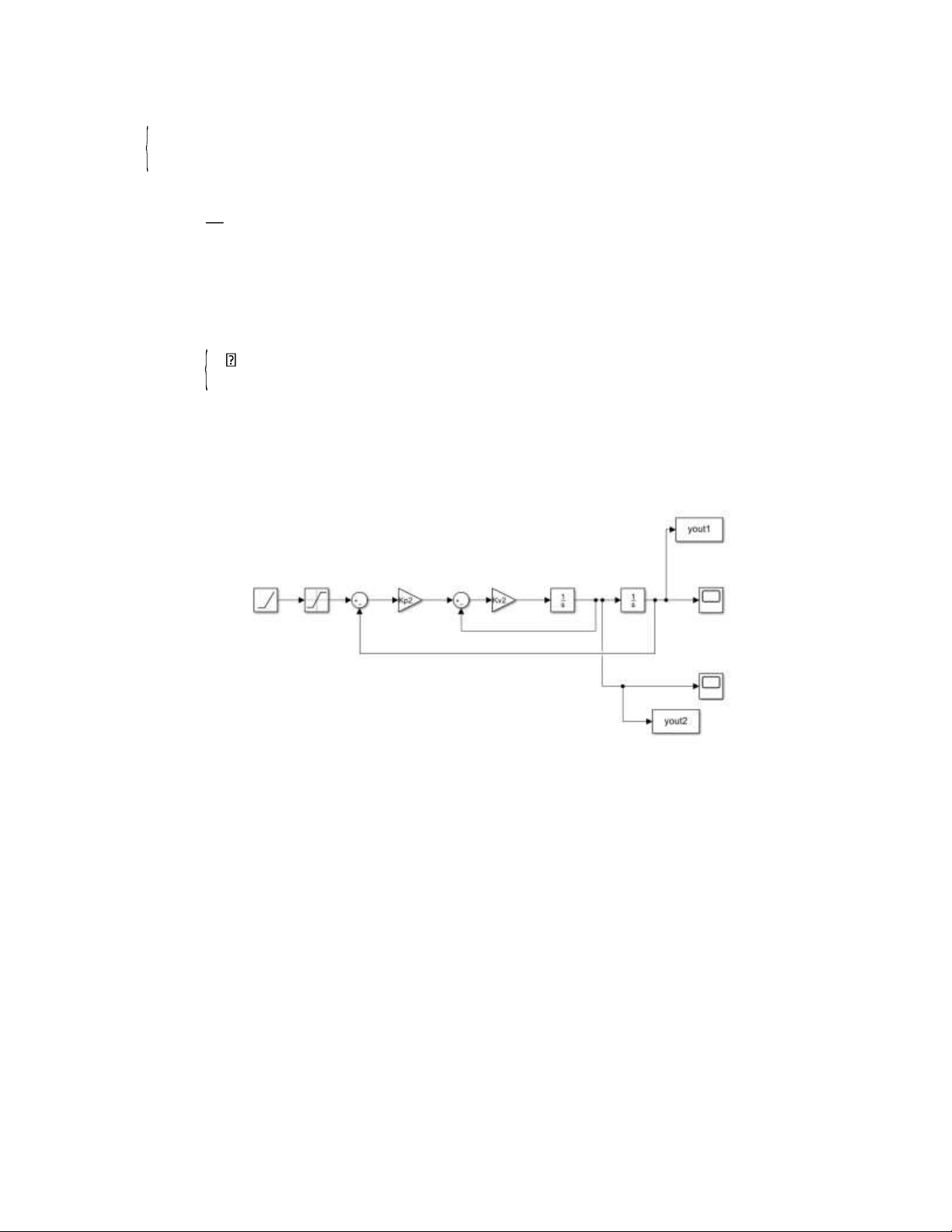
Xây dựng mô hình trên matlab Simulink
Hình 3 :Sơ đồ khối mô phỏng vị trí và vận tốc lOMoARcPSD| 37054152 b)
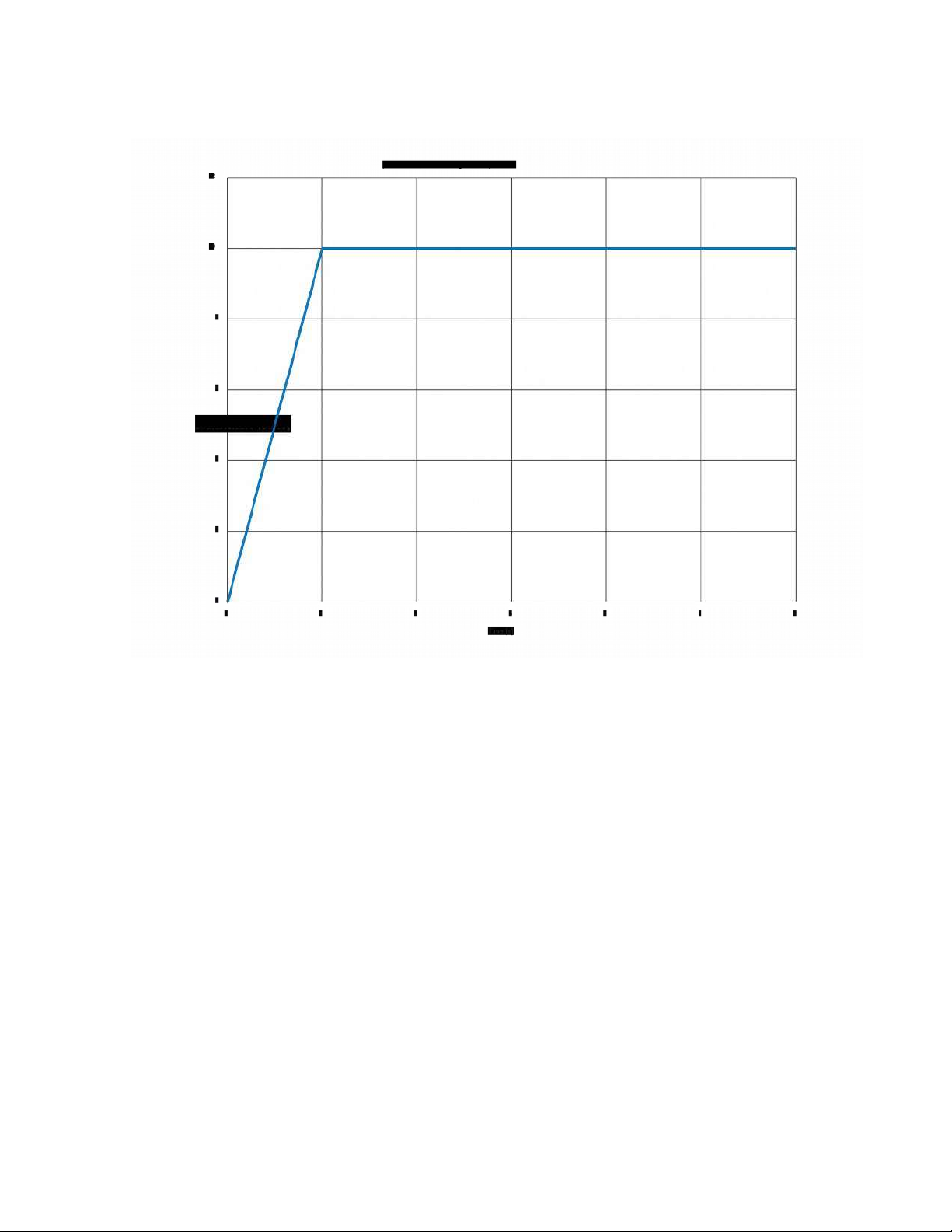
Hình ảnh sau khi được mô phỏng:
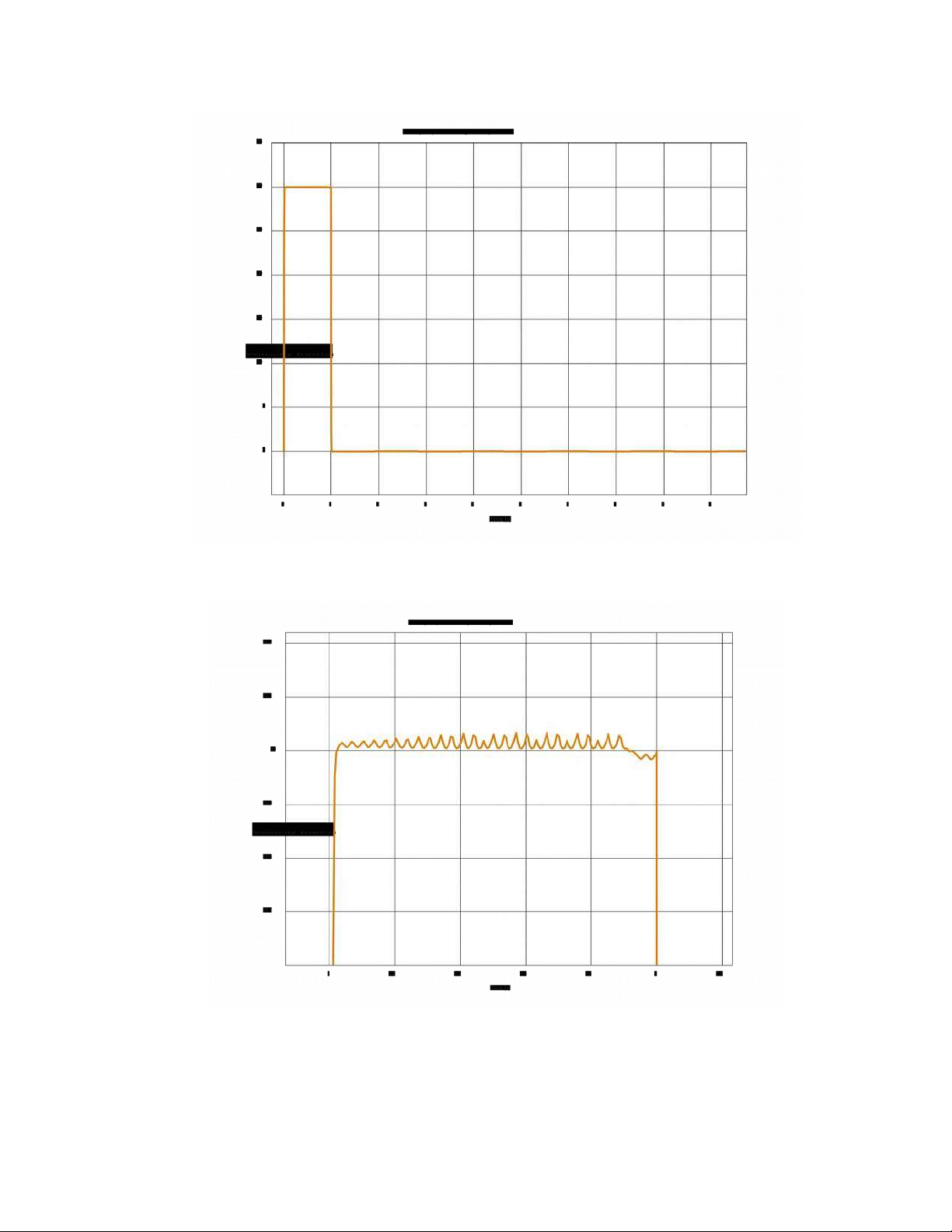
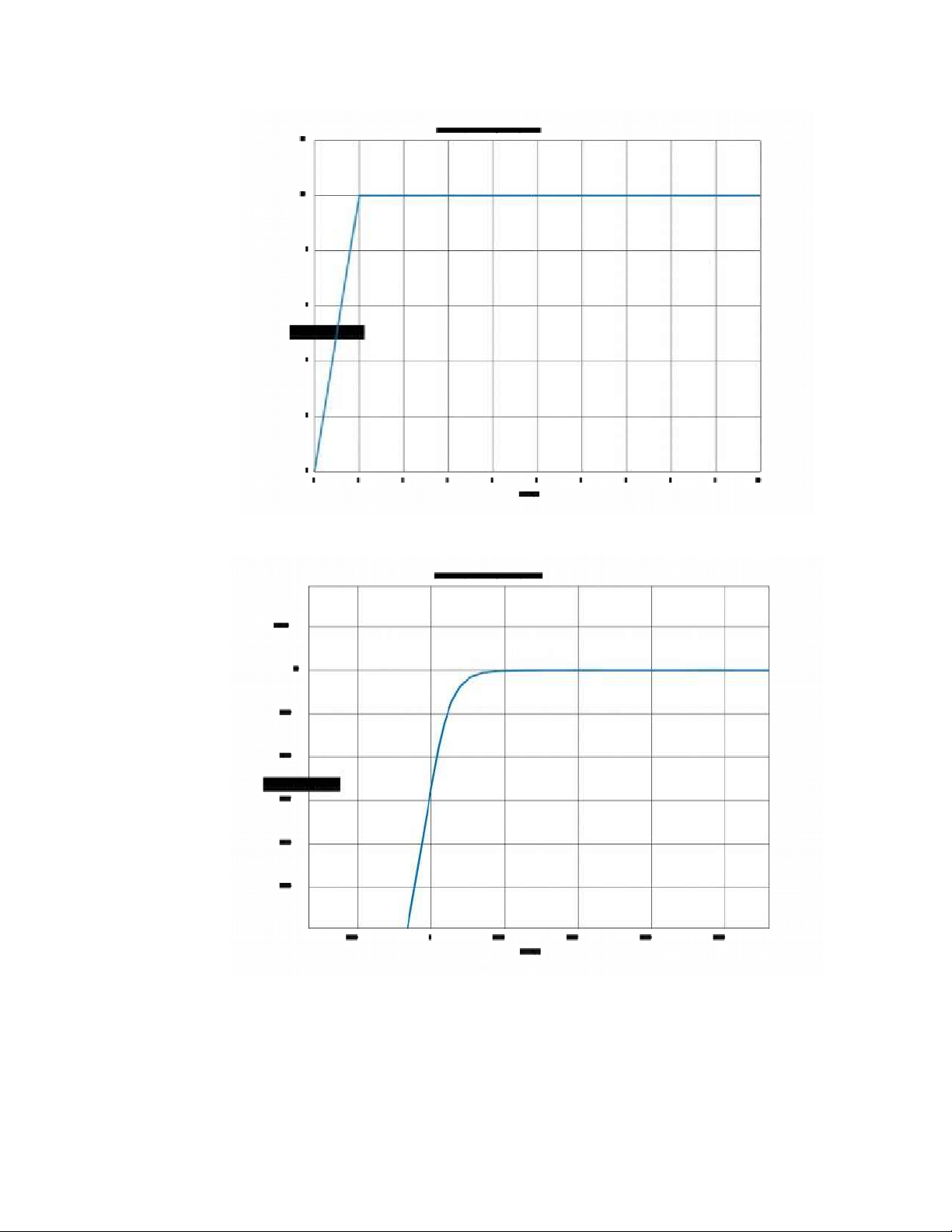
Hình 4.1: Đáp ứng ngõ ra của vị trí lOMoARcPSD| 37054152 Hình 4.2
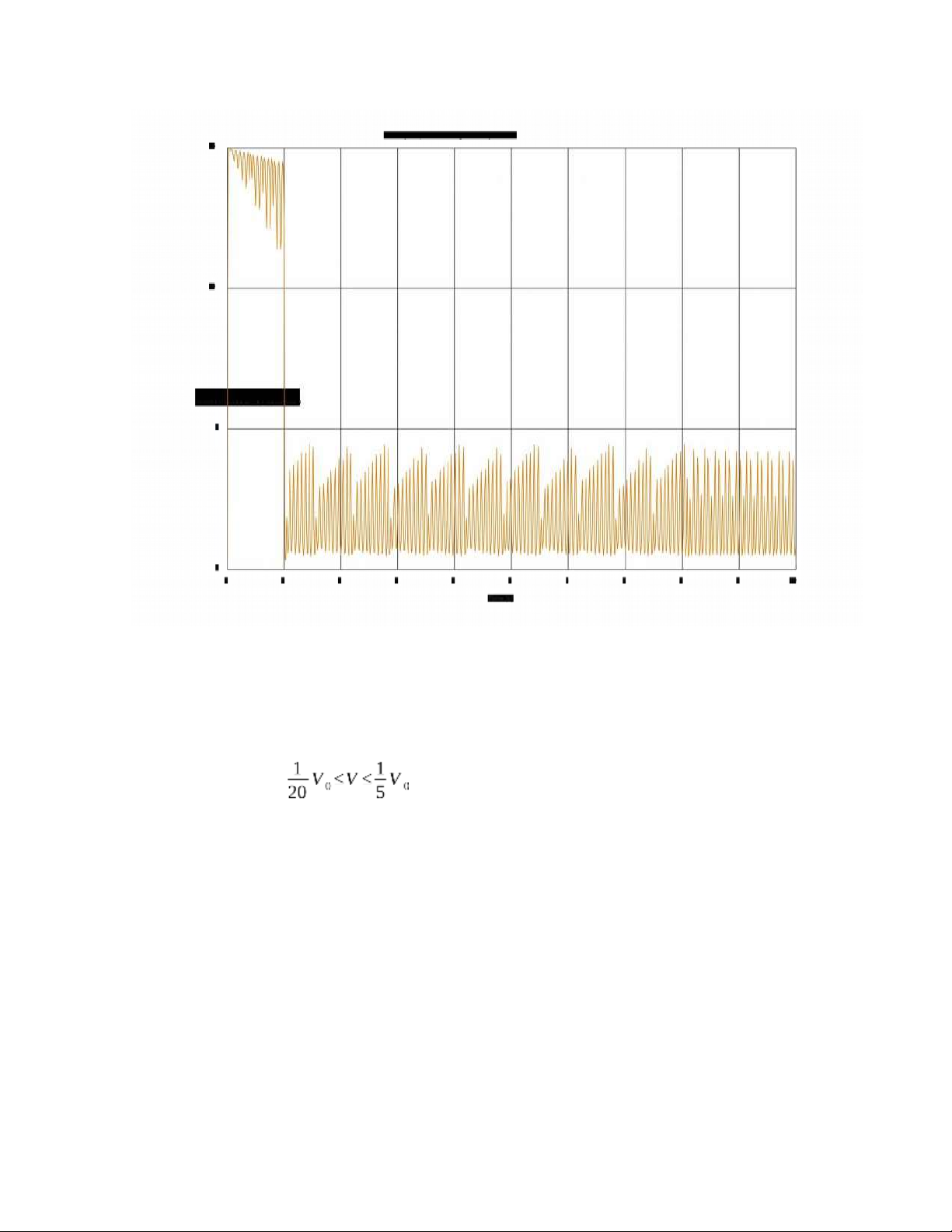
Hình 5.1: Đáp ứng ngõ ra của vận tốc lOMoARcPSD| 37054152 Hình 5.2 Hình 5.3 2.2 Bậc 1: -Tốc độ thấp:
rad/s => Chọn V = 15 rad/s lOMoARcPSD| 37054152 - ωL = = = 1138,55 rad/s
- Kp1 = ωL . Cp1 =1138,55. Cp1
Tìm Cp1 ( NL=4 ; Cp=0,24 ; Cv =0,82 ; EL = 0.01 )
b0=(1+NL).Cp.Cv=(1+4 ).0,24.0,82=0,984
b1=(1+NL).(Cv+2.Cv .Cp.EL)+2.NL. EL=4,19968 b0
- Cp1= b1=0,2343036
Kp1=1138,55.0,2343036=266,77 a)
Xây dựng mô hình mô phỏng trên matlab simulink
Hình 6: Sơ đồ khối của bậc 1 b)
Hình ảnh sau khi được mô phỏng. lOMoARcPSD| 37054152
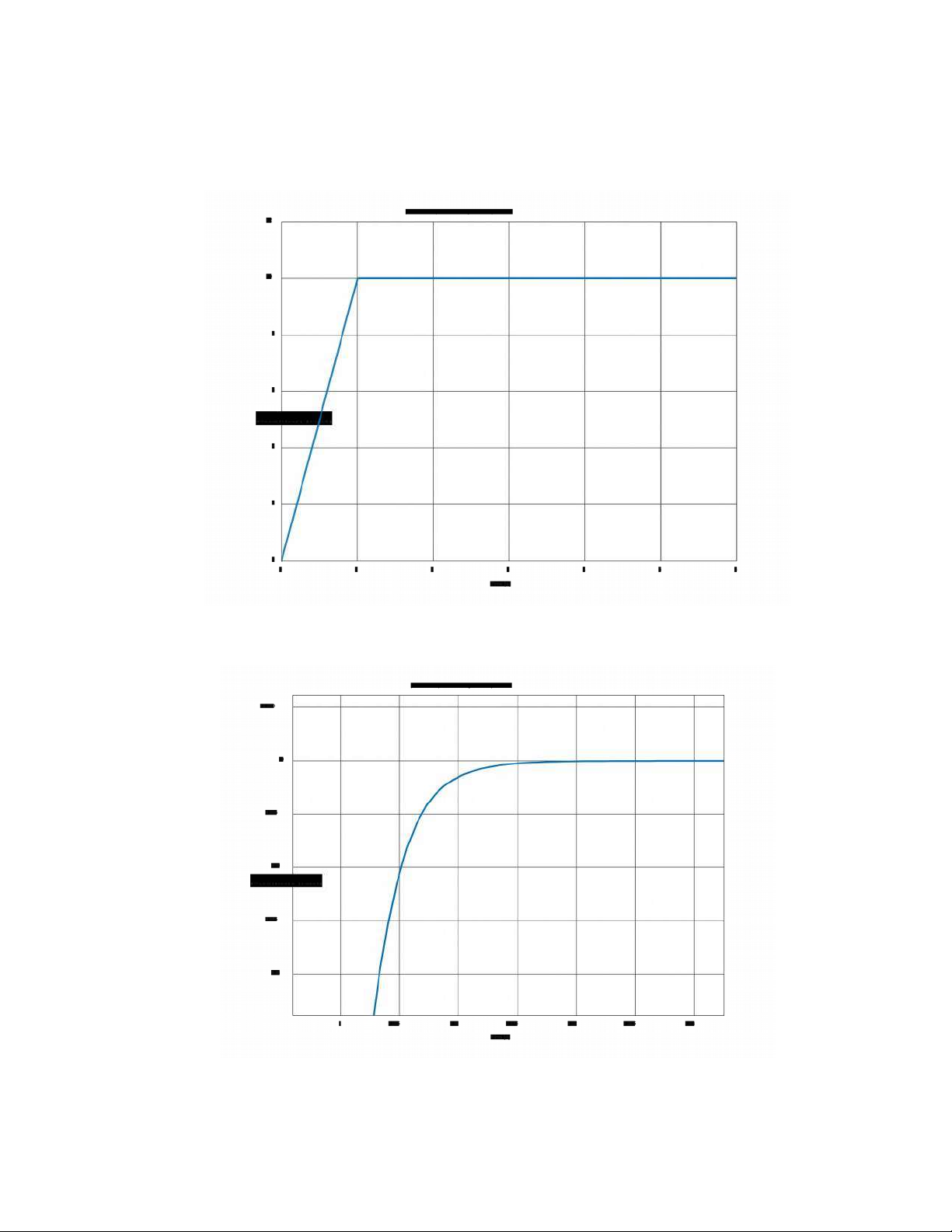
Hình 7.1: Đáp ứng của vị trí Hình 7.2 lOMoARcPSD| 37054152
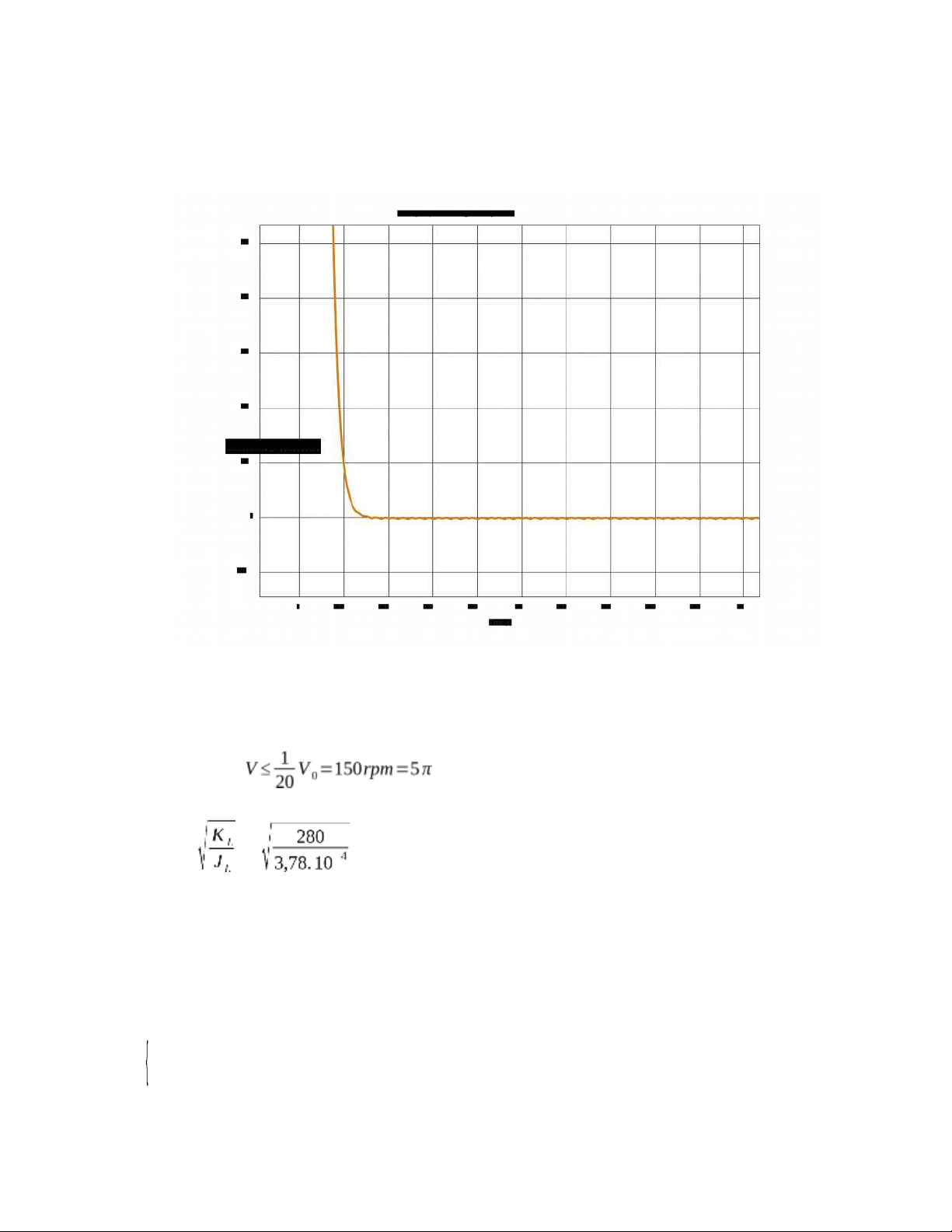
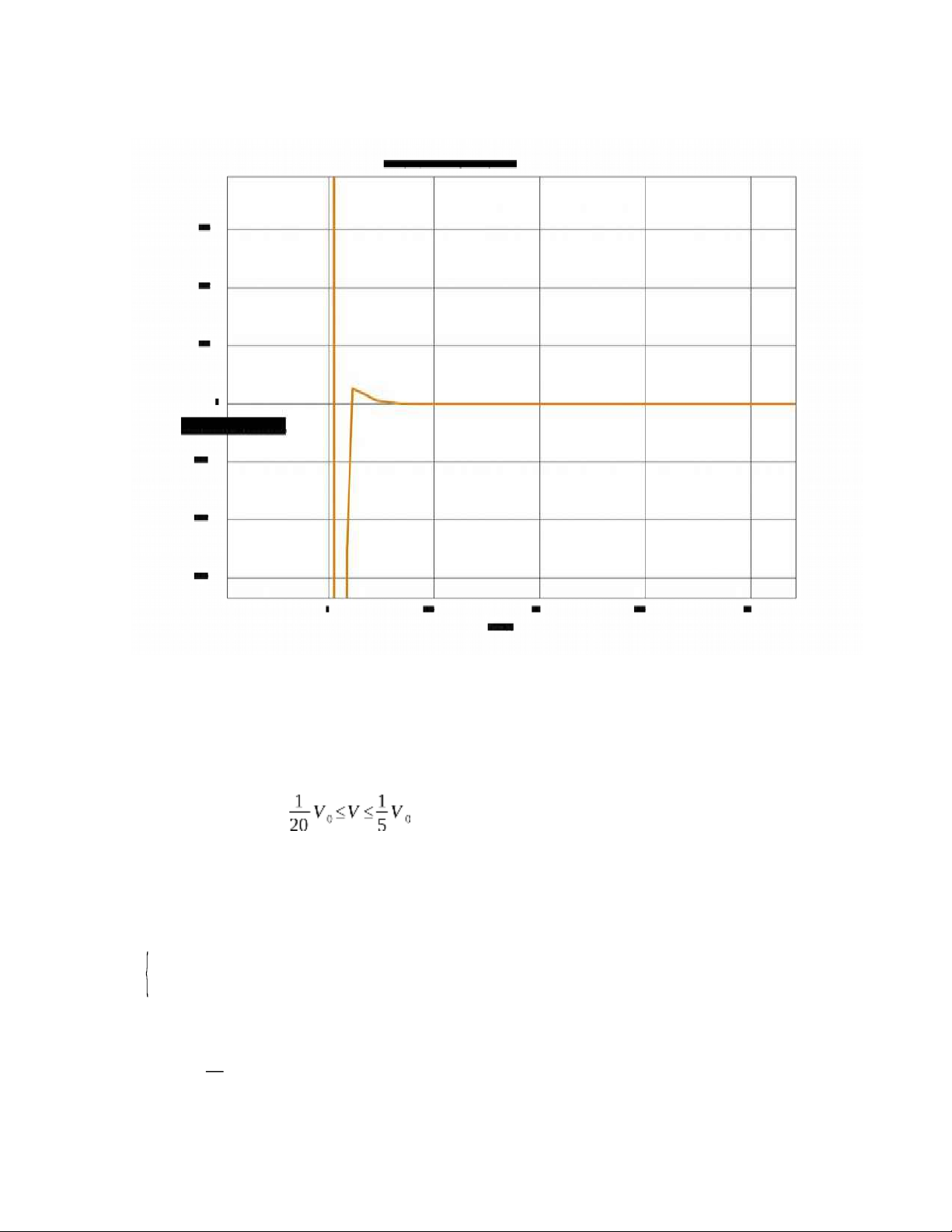
Hình 8: Đáp ứng của vận tốc 2.3 Bậc 2: Tốc độ trung bình:
=> 150 [rpm] ≤V ≤ 600 [rpm]
=> 5π ≤V ≤20 π [rad/s] => Chọn V = 30 [rad/s]
Tính toán thông số điều khiển( NL=4 ; Cp=0,24 ; Cv =0,82 ; EL = 0.01 )
{KKpv22==CCpv22.ω.ωLL với ωL = 1138,55 rad/s lOMoARcPSD| 37054152
b0=(1+NL).Cp.Cv=(1+4 ).0,24.0,82=0.984 b1=(1+NL).(Cv+2.Cv
.Cp.EL)+2.NL. EL=4,19968 b0
Cp2=Cp1= b1=0,2343036
Cv2=4.Cp2 = 4. 0,2343036 = 0,9372144
Kp2=0,2343036.1138,55=266,77
Kv2=0,9372144.1138,55=1067,065 a)
Xây dựng mô hình mô phỏng trên matlab Simulink
Hình 9: Sơ đồ khối bậc 2 c)
Hình ảnh đáp ứng sau khi mô phỏng lOMoARcPSD| 37054152
Hình 10.1: Đáp ứng của vị trí Hình 10.2 lOMoARcPSD| 37054152
Hình 11.1 :Đáp ứng của vận tốc lOMoARcPSD| 37054152 Hình 11.2 lOMoARcPSD| 37054152 Hình 11.3 3.
Tải 2 ( NL = 7 , EL = 0.01 , KL=280 ):
- JM = 0,54 kg. cm2 = 0,54. 10−4 kg. m2 (Tìm thấy ở bảng thông số ) Với điều kiện rang buộc ban đầu:
Chọn NL = 7 , EL = 0.01:
- NG = 1 (hệ số giảm tốc) Ta có: JL
2 . JM = 7.1. 0,54. 10−4 = 3,78. 10−4 = - NL 2
=> JL = NL . NG NG .JM kg. m2 - ωL = = = 860,663 rad/s DL - EL = => DL = 0.0065 2√JL.KL lOMoARcPSD| 37054152 3.1 Bậc 4: -Tốc độ cao: V
5 V = 600 rpm => chọn V = 63 rad/s 0
Hệ bậc 4 nên chọn : {CCP=00,,2482 v=
- {KKPv==CCPv.ω.ωLL => {KKvP==705,74366206,559 1 - JT = JM JL −4 kg . m2 + 2 = 4,32. 10 NG
- Kgv = Kv . JT = 0,3049 a)
Xây dựng mô hình trên matlab Simulink lOMoARcPSD| 37054152
Hình 12 :Sơ đồ khối mô phỏng vị trí và vận tốc b)
Hình ảnh sau khi được mô phỏng:
Hình 13.1: Đáp ứng ngõ ra của vị trí lOMoARcPSD| 37054152 Hình 13.2
Hình 14.1: Đáp ứng ngõ ra của vận tốc lOMoARcPSD| 37054152 Hình 14.2 Hình 14.3 3.2 Bậc 1: -Tốc độ thấp:
rad/s => Chọn V = 15 rad/s - ωL = = =860,663 rad/s
- Kp1 = ωL . Cp1 =860,663. Cp1
Tìm Cp1 ( NL=7 ; Cp=0,24 ; Cv =0,82 ; EL = 0.01 )
b0=(1+NL).Cp.Cv=(1+7) .0,24.0,82=1.5744
b1=(1+NL).(Cv+2.Cv .Cp.EL)+2.NL. EL=6,7315 lOMoARcPSD| 37054152 b0
- Cp1= b1=4,275597
- Kp1=860,663.4,275597 = 3679,8481 a)
Xây dựng mô hình mô phỏng trên matlab simulink
Hình 6: Sơ đồ khối của bậc 1 lOMoARcPSD| 37054152 b)
Hình ảnh sau khi được mô phỏng.
Hình 15.1: Đáp ứng của vị trí lOMoARcPSD| 37054152 Hình 15.2
Hình 16.1: Đáp ứng của vận tốc lOMoARcPSD| 37054152 Hình 16.2 Hình 16.3 3.3 Bậc 2:
Tính toán thông số điều khiển ( NL=7 ; Cp=0,24 ; Cv =0,82 ; EL = 0.01 ) Tốc độ trung bình:
=> 150 [rpm] ≤V ≤ 600 [rpm]
=> 5π ≤V ≤20 π [rad/s] => Chọn V = 30 [rad/s]
{KKpv22==CCpv22.ω.ωLL với ωL = 860,663 rad/s
b0=(1+NL).Cp.Cv=(1+7) .0,24.0,82=1,5744
b1=(1+NL).(Cv+2.Cv .Cp.EL)+2.NL. EL=6,7315 b0
Cp2=Cp1= b1=4,275597 lOMoARcPSD| 37054152
Cv2=4.Cp2 = 4. 4,275597 = 17,102388
Kp2=860,663.4,275597=3679,8481
Kv2=860,663.17,102388=14719,3926 a)
Xây dựng mô hình mô phỏng trên matlab Simulink
Hình 9: Sơ đồ khối bậc 2 b)
Hình ảnh đáp ứng sau khi mô phỏng lOMoARcPSD| 37054152
Hình 16.1: Đáp ứng của vị trí Hình 16.2 lOMoARcPSD| 37054152
Hình 17.1:Đáp ứng của vận tốc lOMoARcPSD| 37054152 Hình 17.2 Hình 17.3 4. Kết luận:
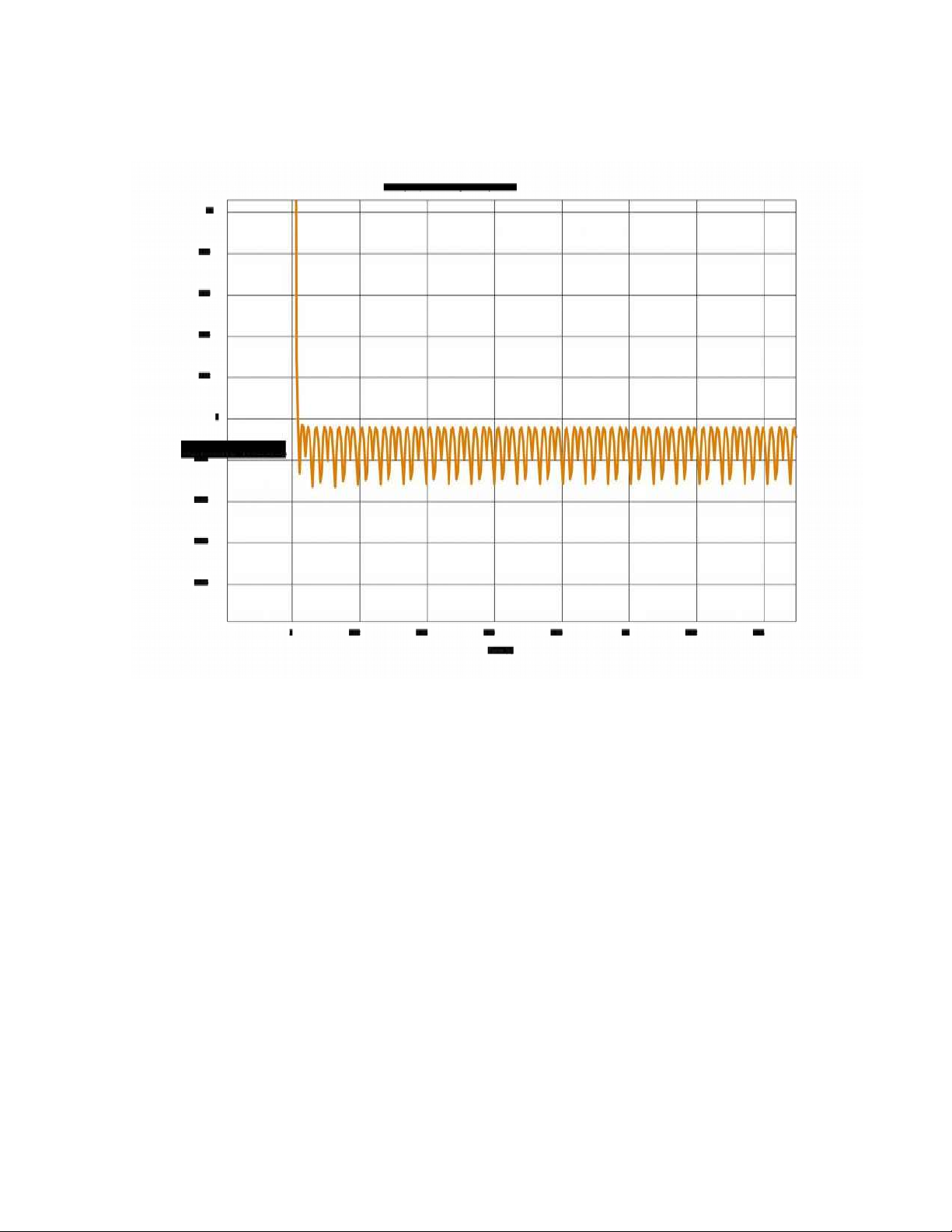
-Như trong mô phỏng ta thấy thì mô hình bậc 1 đã bỏ đi vòng điều khiển vận tốc khiến
cho vận tốc dao động rất nhiều so với mô hình bậc 1 và bậc 3.
-Đáp ứng đầu ra luôn bám sát với tín hiệu mong muốn đầu vào cụ thể là hàm dốc.
-Từ khả năng đáp ứng nhanh và không có vọt lố trong điều khiển vị trí, kết hợp với các
đồ thị đáp ứng vận tốc ở các mức độ khác nhau, ta thấy được đáp ứng vận tốc đủ nhanh,
không có dao động và sai lệch vận tốc không đáng kể.
Tài liệu liên quan:
-

Matlab Simulation of DC Servo Motors for Control Systems | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
142 71 -

Hydraulic Servo System Overview with Mitsubishi Modules | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
127 64 -

Test 1: Servo Motor Control Loops & Feedback Strategies | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
107 54 -
Đề thi cuối học kì 1 năm học 23-24 Môn Mechatronic Servo System Control | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
136 68 -

Trạm AC servo và hydralic servo system | Báo cáo thực tập Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
130 65