Bài giảng Chapter 1: Structure of Mechanism môn Hoá đại cương | Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh
Bài giảng Chapter 1: Structure of Mechanism môn Hoá đại cương | Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh. Tài liệu được sưu tầm giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem.
Môn: Hóa đại cương (604601) 47 tài liệu
Trường: Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh 721 tài liệu
Tác giả:
Preview text:
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM CHAPTER 1 STRUCTURE OF MECHANISM
Assoc.Prof.Dr. Le Thanh Long ltlong@hcmut.edu.vn 1
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM OUTLINE 1. Basic Definitions.
2. Degree of Freedom of Mechanisms. 3. Assur Group.
4. All low pair planar mechanism, four bar linkage mechanism. 5. Special structures. 2
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions 1.1 Machine Element and Link.
1.2 Kinematic Pair and Pair element.
1.3 Classifications of Kinematic Pairs.
1.4 Kinematic Diagram of a Mechanism.
1.5 Kinematic chain and classification of kinematic chain. 3
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions 1.1 Machine Element and Link
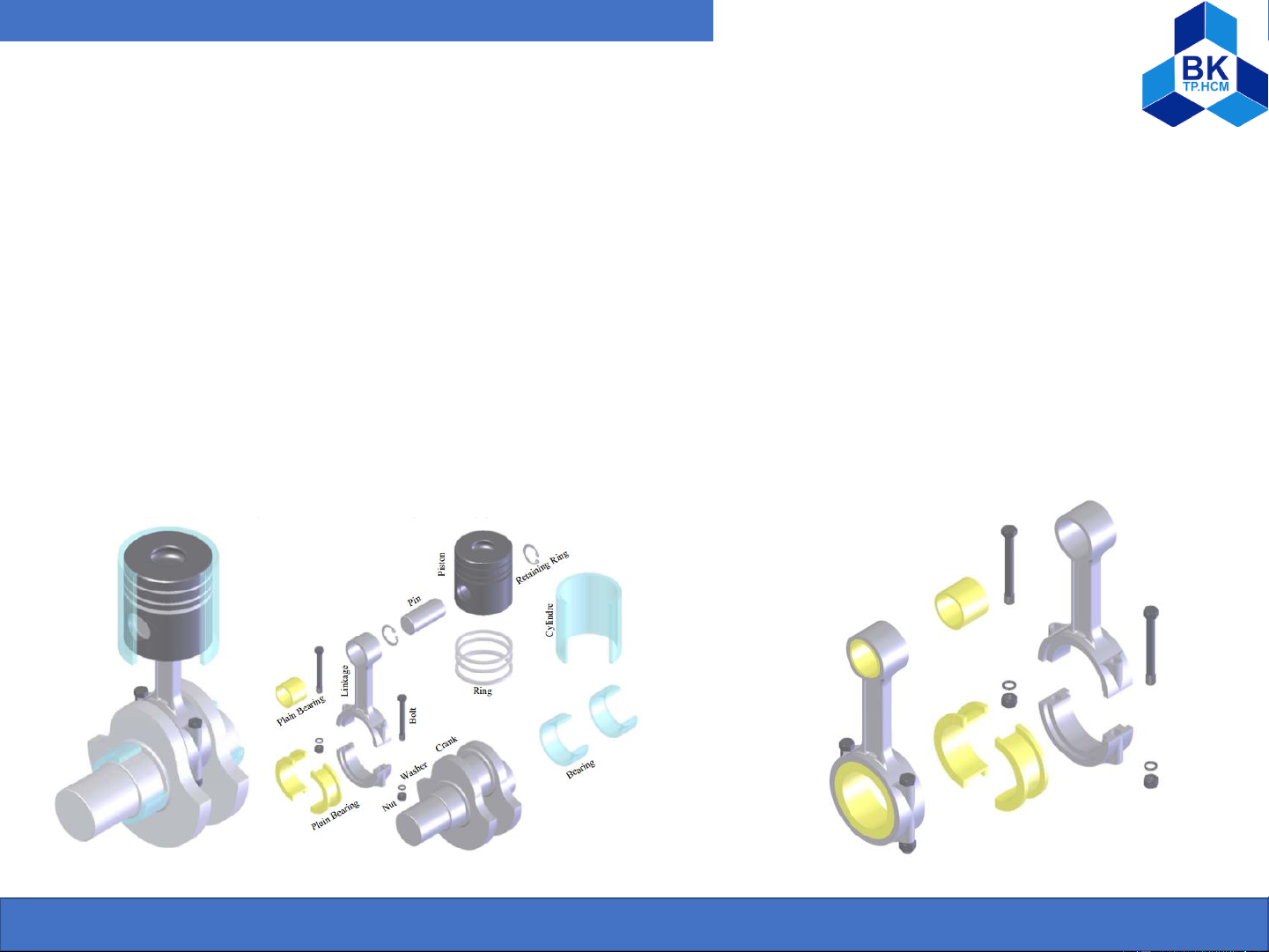
Machine element: all the machines are made up of elements or parts and units, each
element can be separated but still own its functions is called machine element
Link: during working, all of parts has relative motion with respect to others is called a link 4
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.2 Kinematic Pair and Pair element. Degree of Freedom of a link
• One independent movability of a link with respect to a reference frame is called one degree of freedom 5
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.2 Kinematic Pair and Pair element. Degree of Freedom of a link
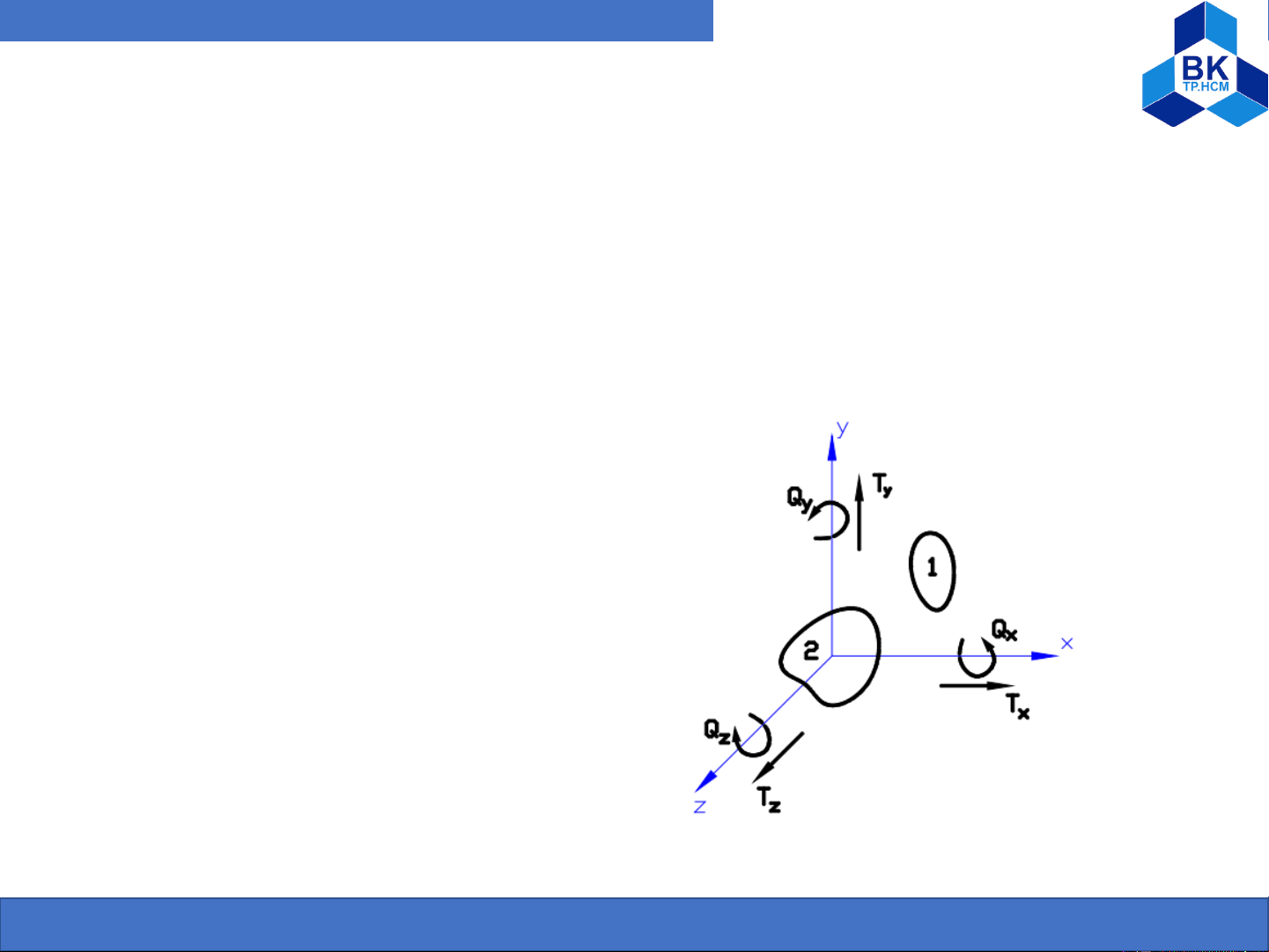
• Between 2 links in a plane 3 dof : Tx, Ty, Qz
• Between 2 links in a space 6 dof : Tx, Ty, Tz, Qx, Qy, Qz 6
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.2 Kinematic Pair and Pair element.
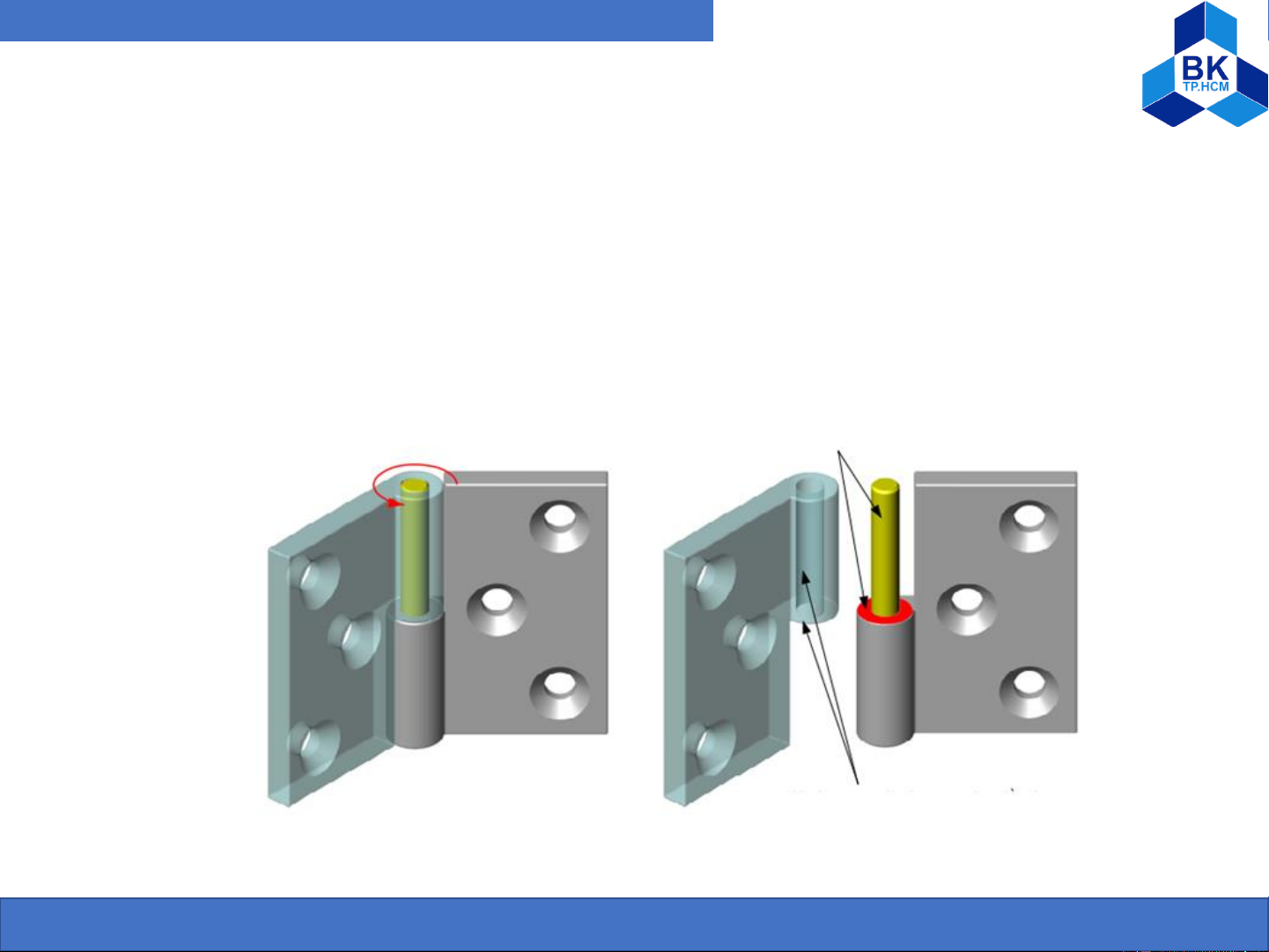
Kinematic pair : connection between two links to limit their relative movement.
All points of contact between two links is called a Pair element.
pair element of the right hinges
pair element of the left hinges 7
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
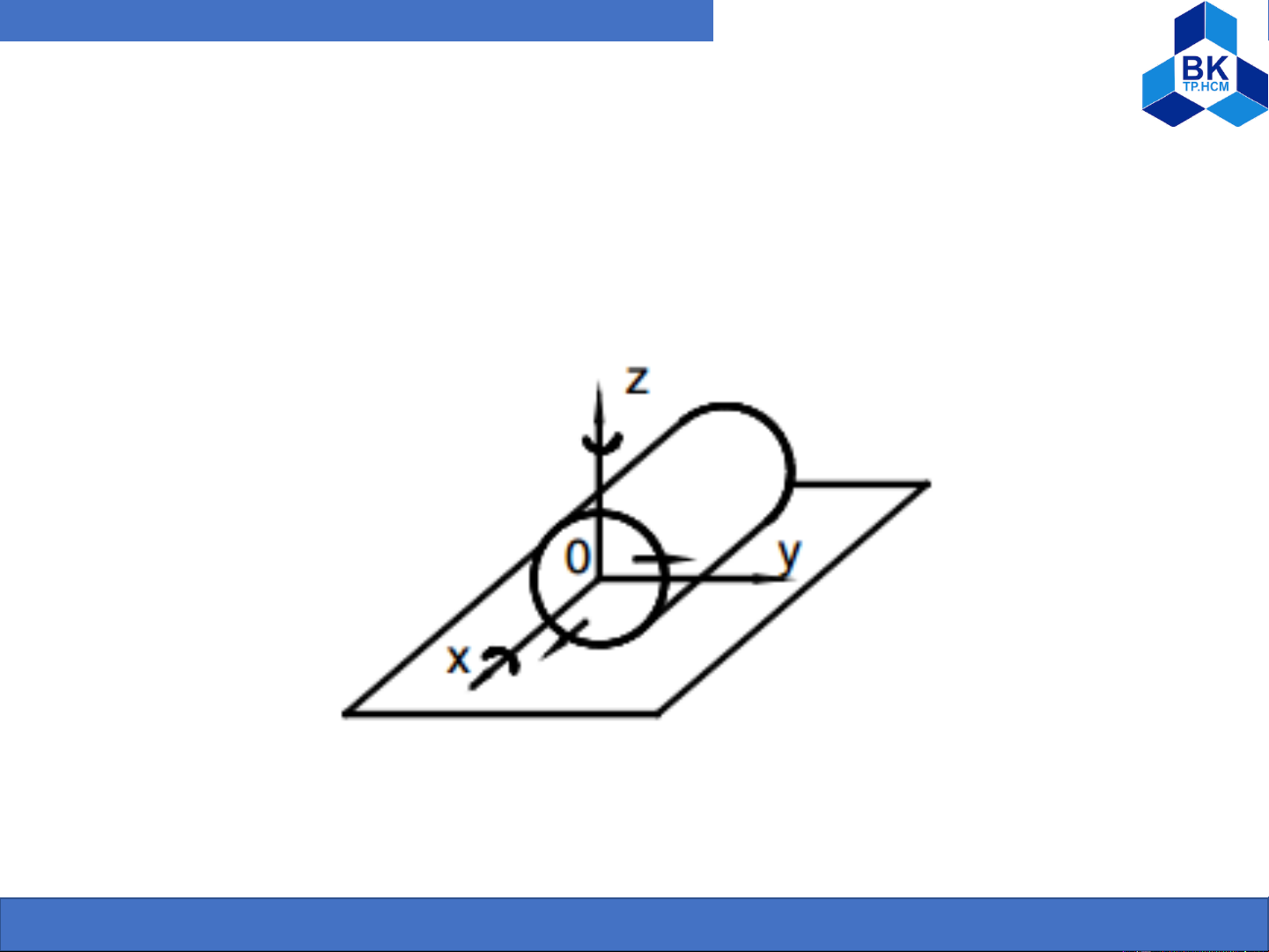
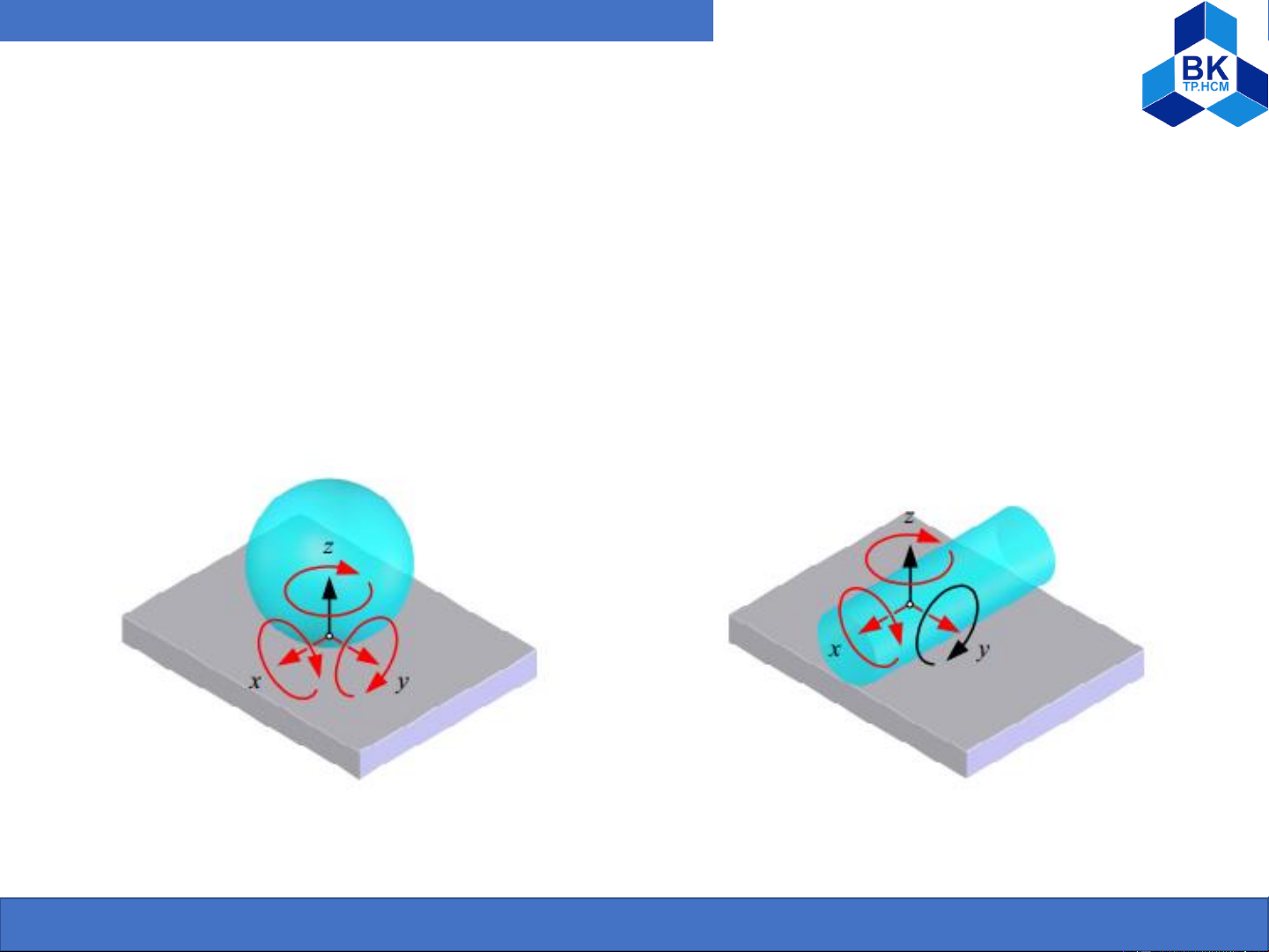
1.3 Classifications of Kinematic Pairs
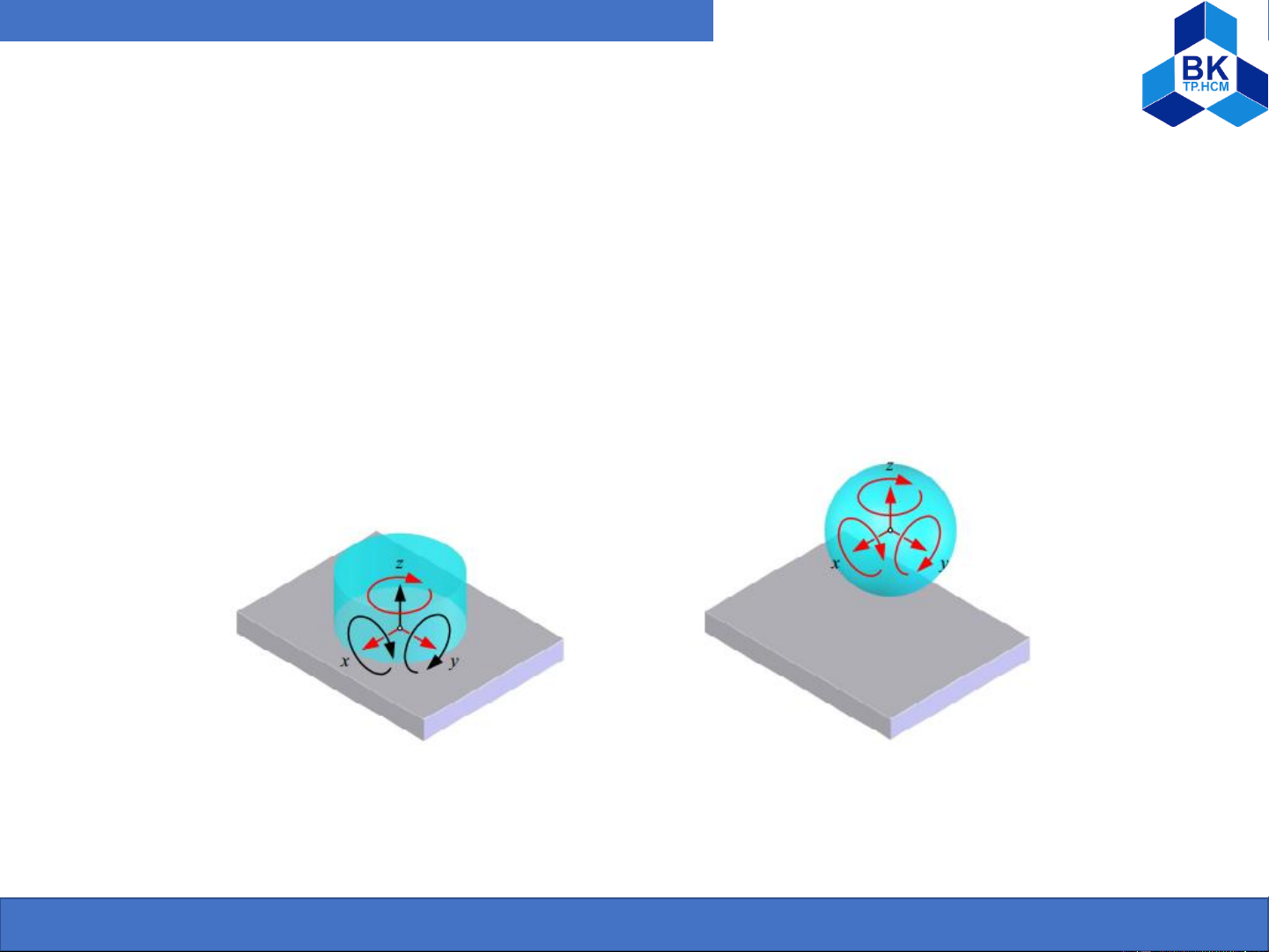
a. By the number of constrains: type k joint has k constrains Type 1 8
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
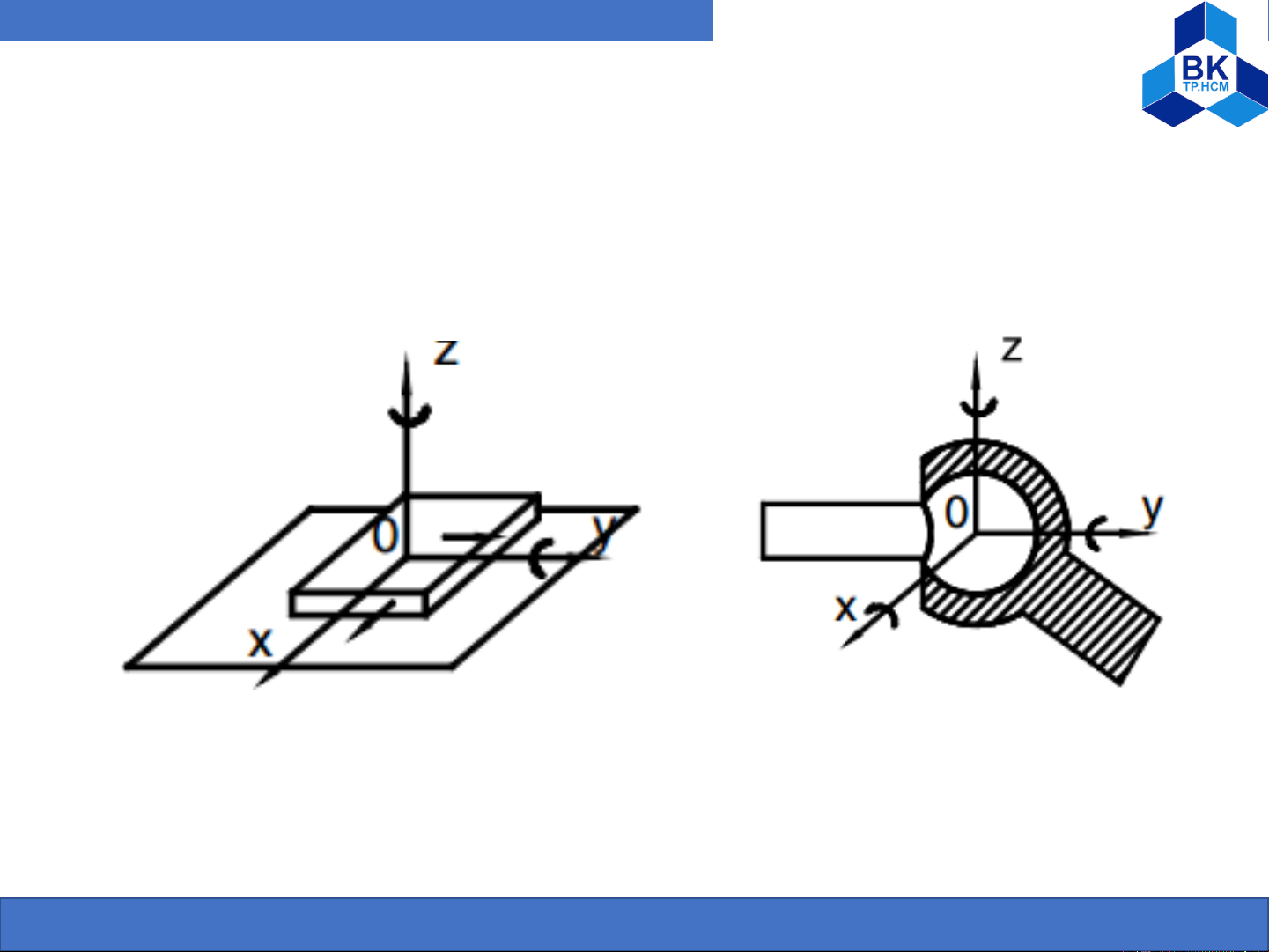
1.3 Classifications of Kinematic Pairs
a. By the number of constrains: type k joint has k constrains Type 2 9
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
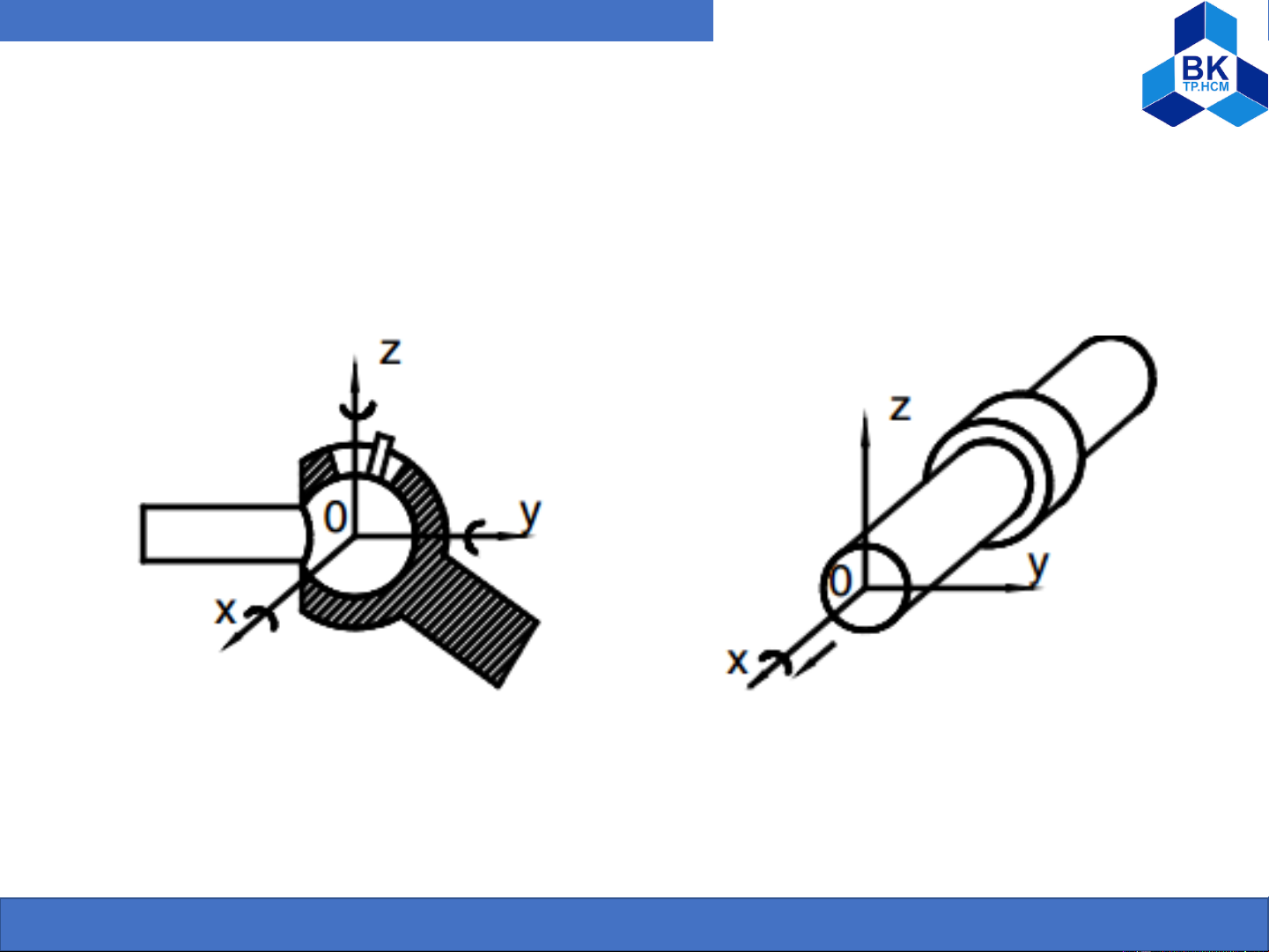
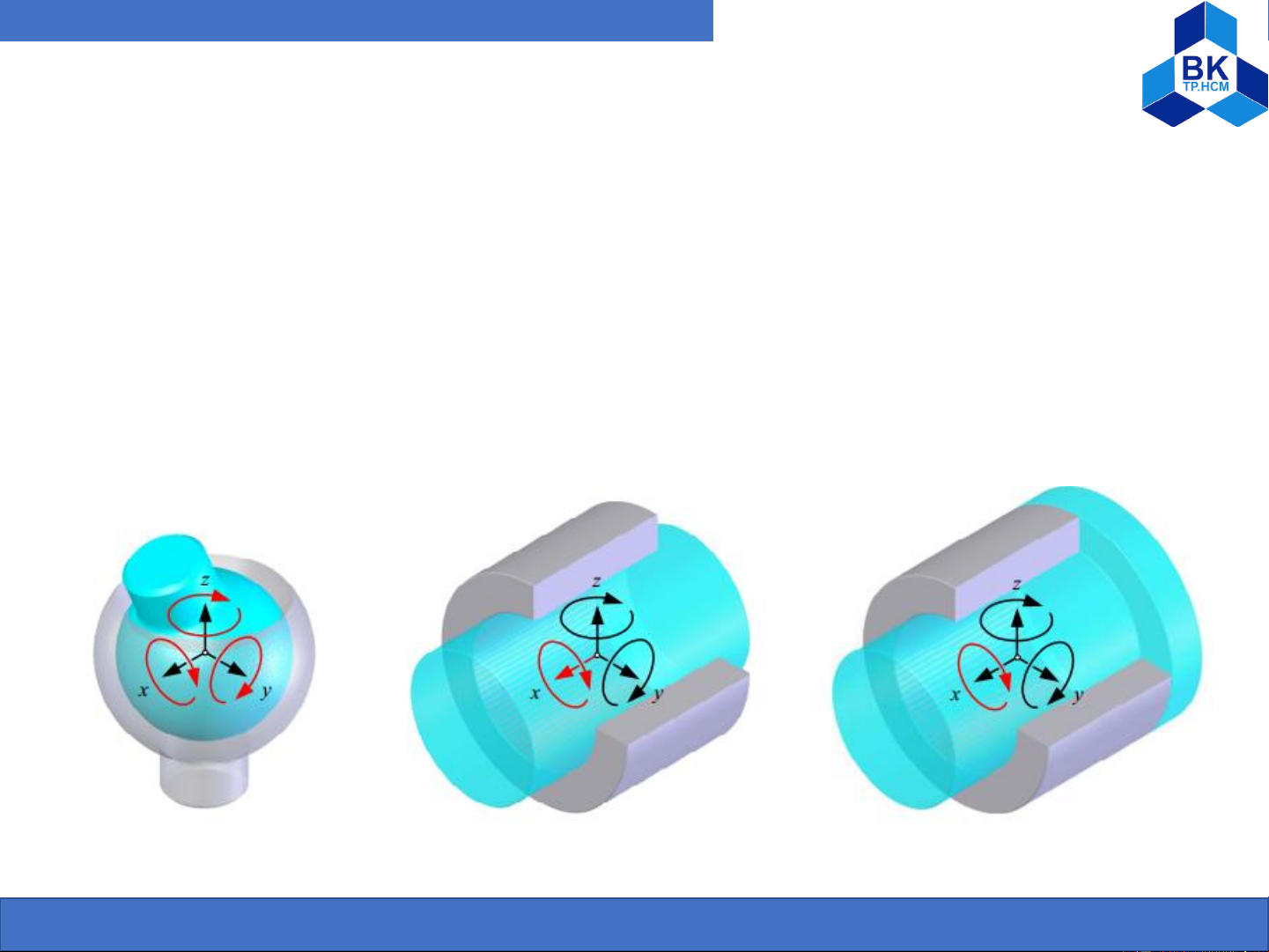
1.3 Classifications of Kinematic Pairs
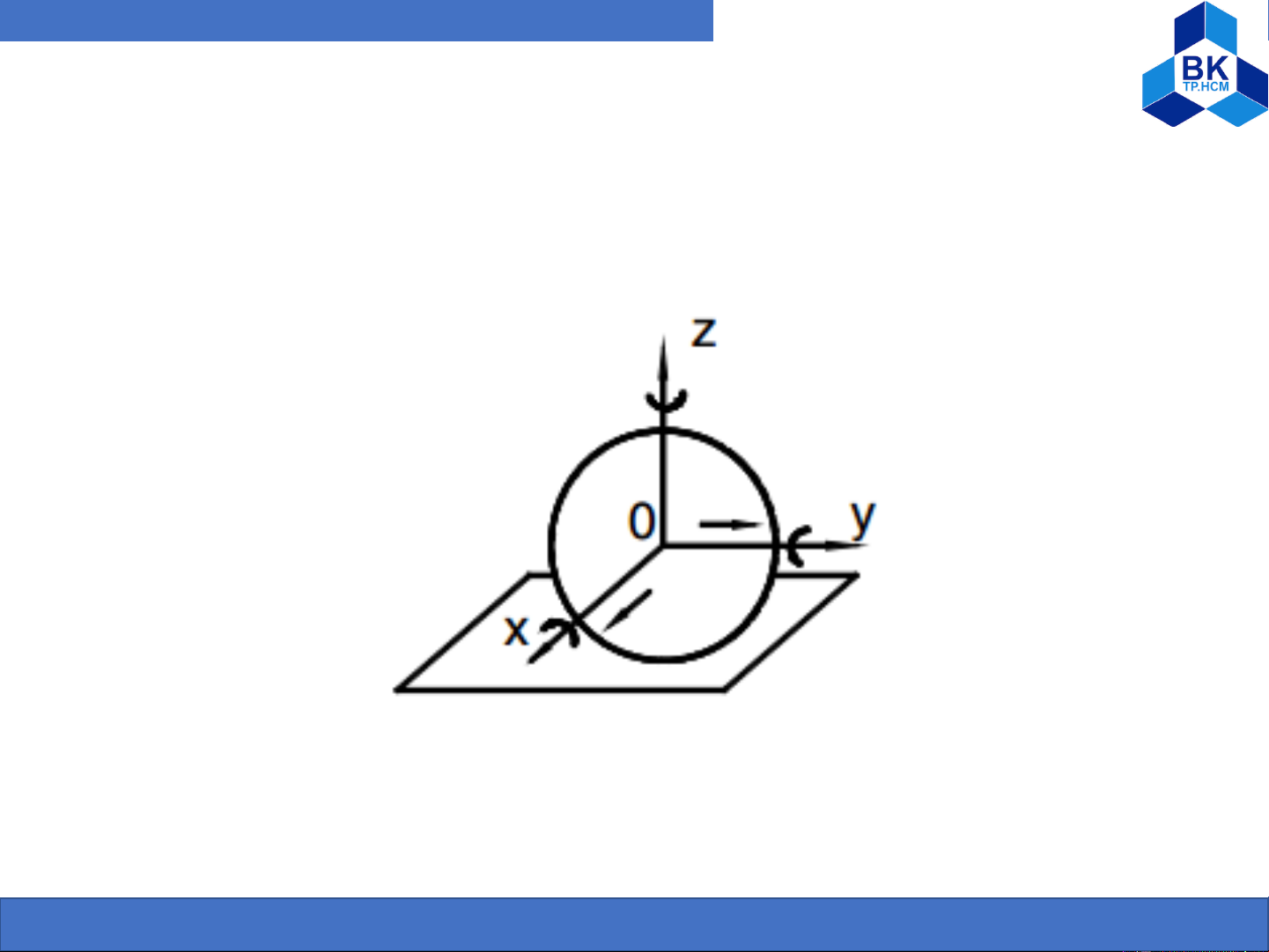
a. By the number of constrains: type k joint has k constrains Type 3 10
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
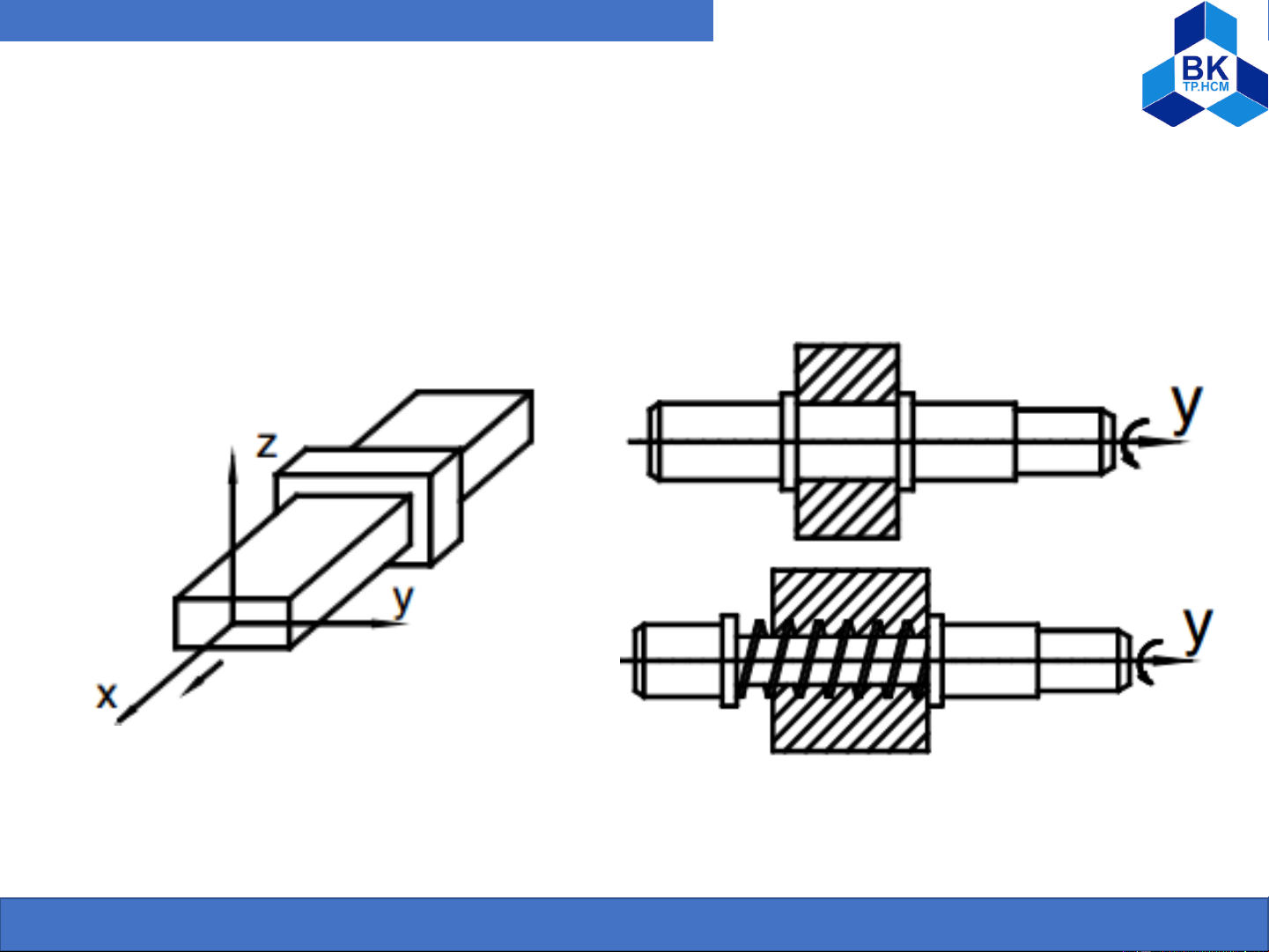
1.3 Classifications of Kinematic Pairs
a. By the number of constrains: type k joint has k constrains Type 4 11
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.3 Classifications of Kinematic Pairs
a. By the number of constrains: type k joint has k constrains Type 5 12
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.3 Classifications of Kinematic Pairs a. By the contact:
• Higher pair: pair elements are points or lines
• Lower pair: pair elements are surfaces 13
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
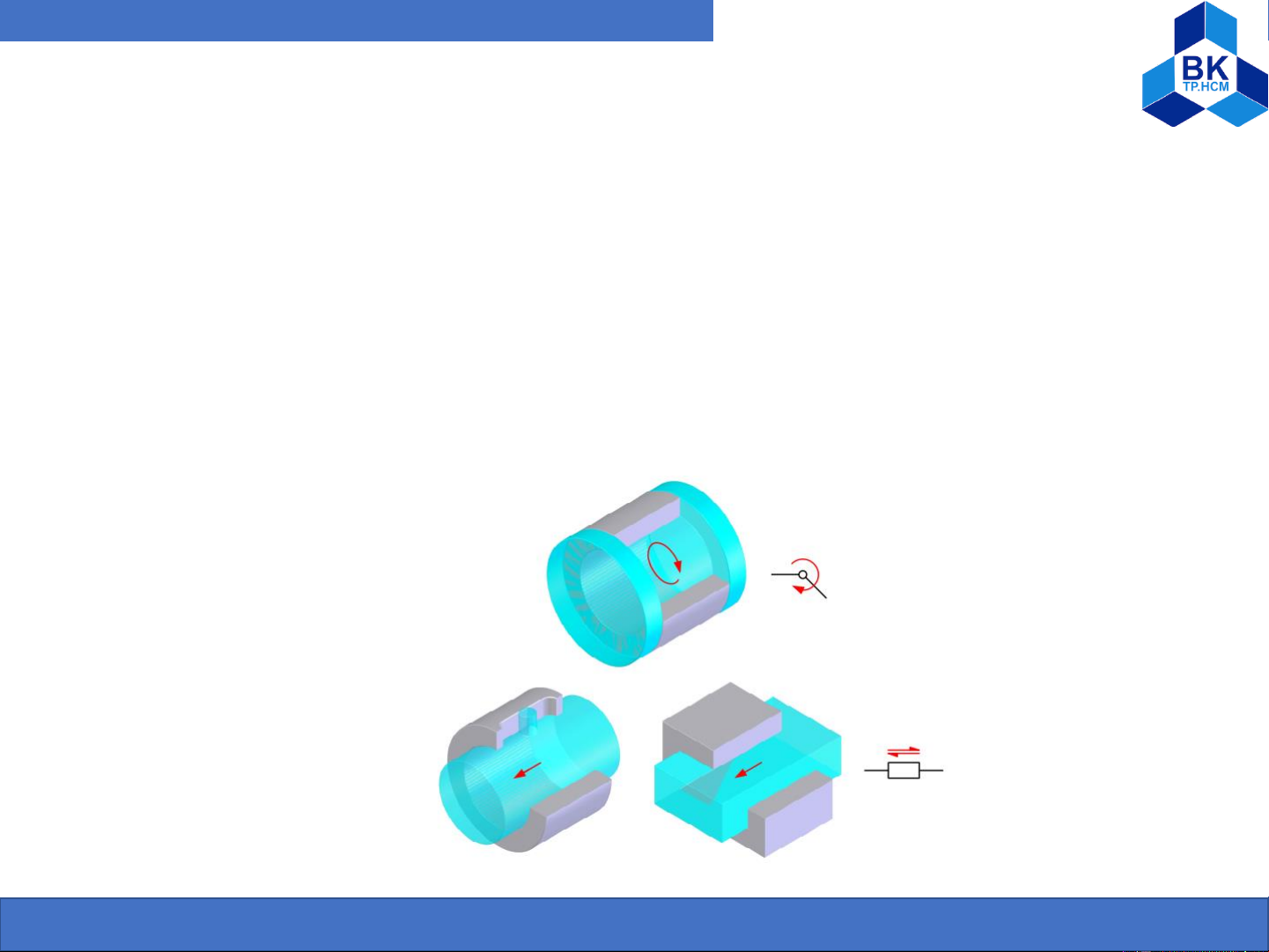
1.3 Classifications of Kinematic Pairs
a. By the contact : type k joint has k constrains
• Lower pair: pair elements are surfaces 14
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.4 Kinematic Diagram of a Mechanism.
a. Kinematic Diagram of a joint
For the convenience of research, joints are represented by kinematic diagrams 15
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
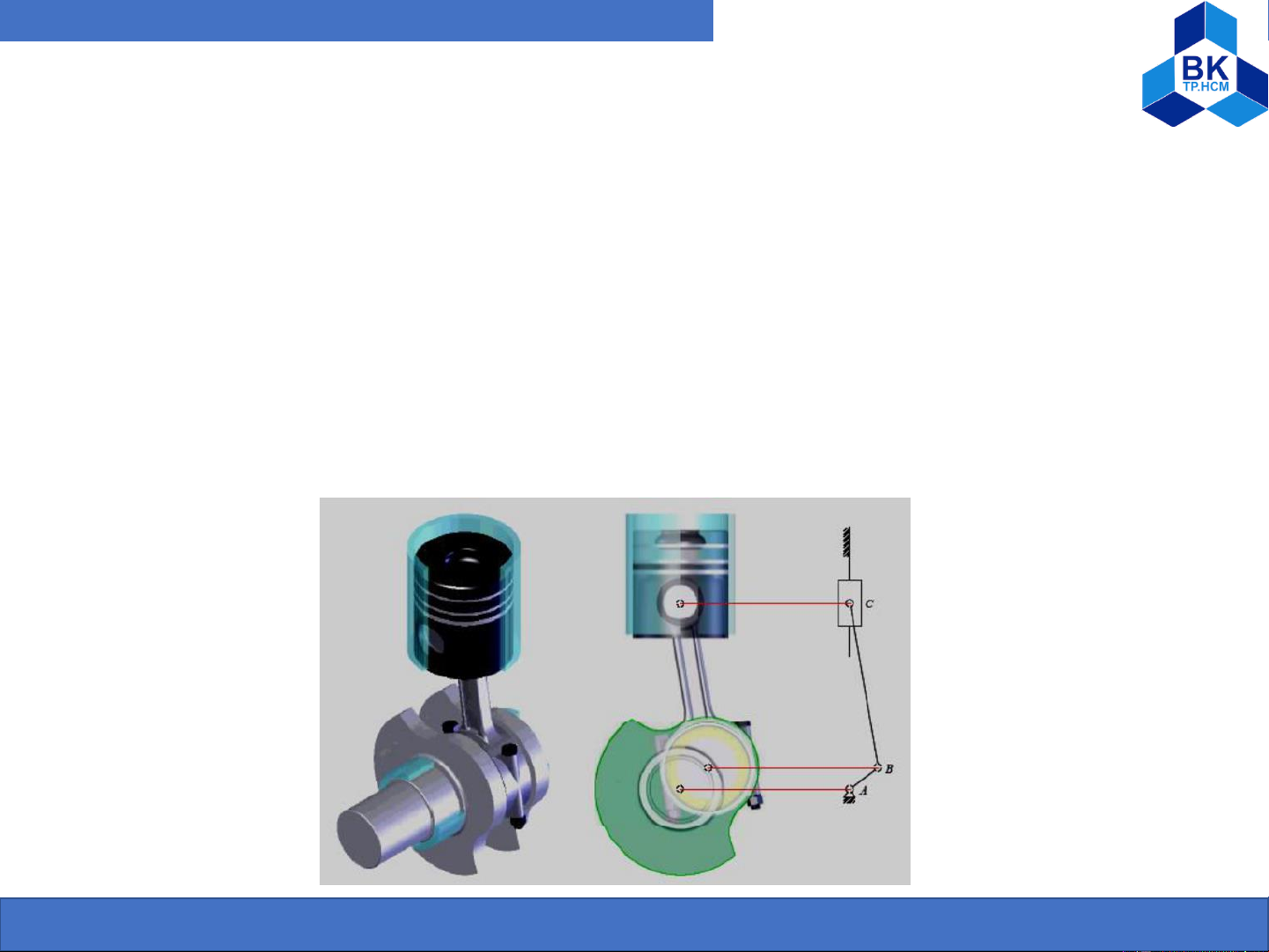
1.4 Kinematic Diagram of a Mechanism. b. Kinematic diagram of link.
Links are represented by kinematic diagram.
In the kinematic diagram of links: - All pairs must be presented. -
All dimensions effect to the motion of the mechanism must be presented 16
Department of Machine Design - Faculty of Mechanical Engineering
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.5 Kinematic chain and classification of kinematic chain
Kinematic chain: the combination of links and pairs
Classification of kinematic chains: - Closed kinematic chain. - Open kinematic chain. - Planar kinematic chain. - Spatial kinematic chain. 17
Department of Machine Design - Faculty of Mechanical Engineering
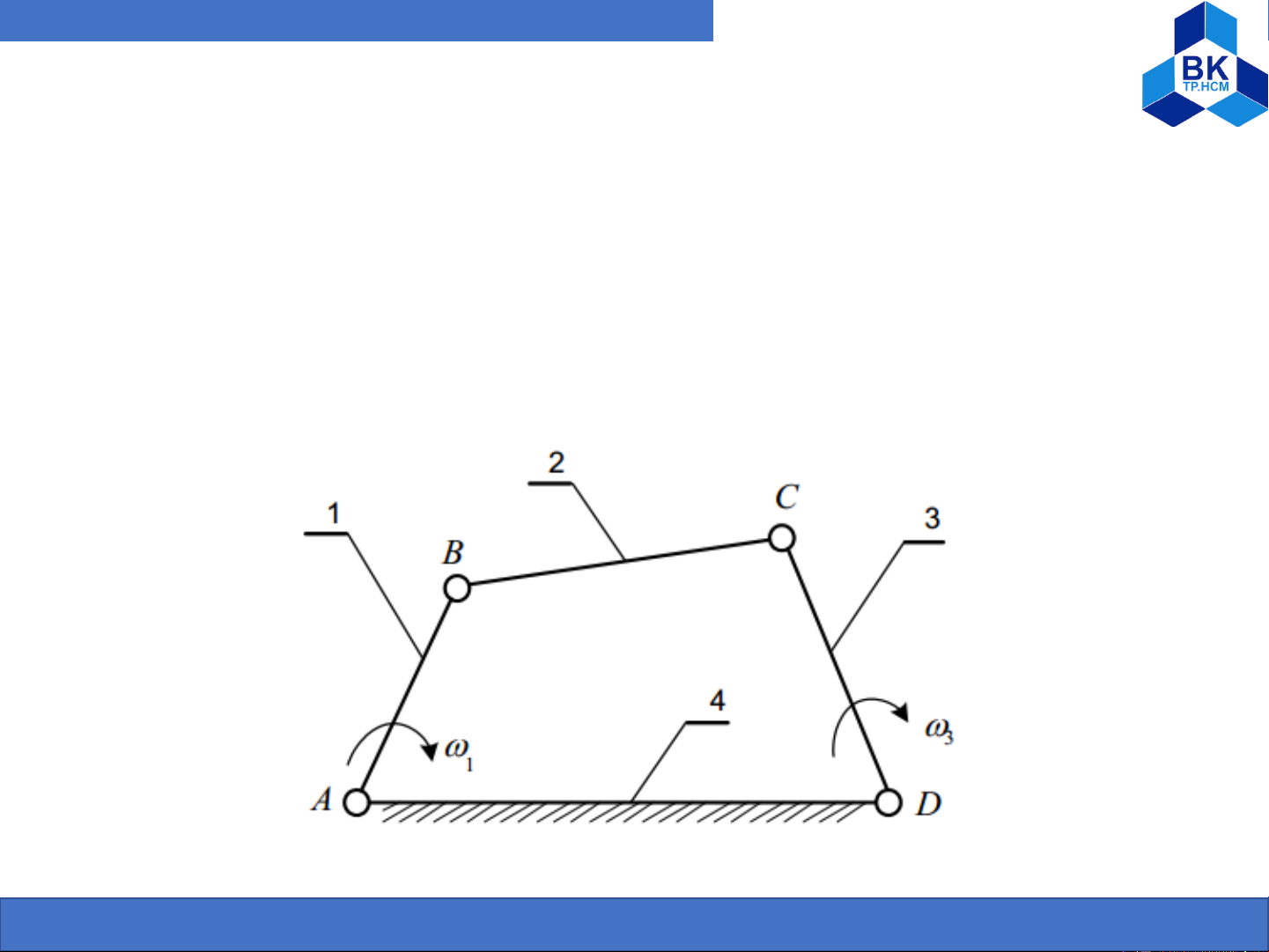
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.5 Kinematic chain and classification of kinematic chain
- Closed kinematic chain : Links are connected together into one or more closed
perimeters (each link must participate in at least 2 dynamic joints) 18
Department of Machine Design - Faculty of Mechanical Engineering
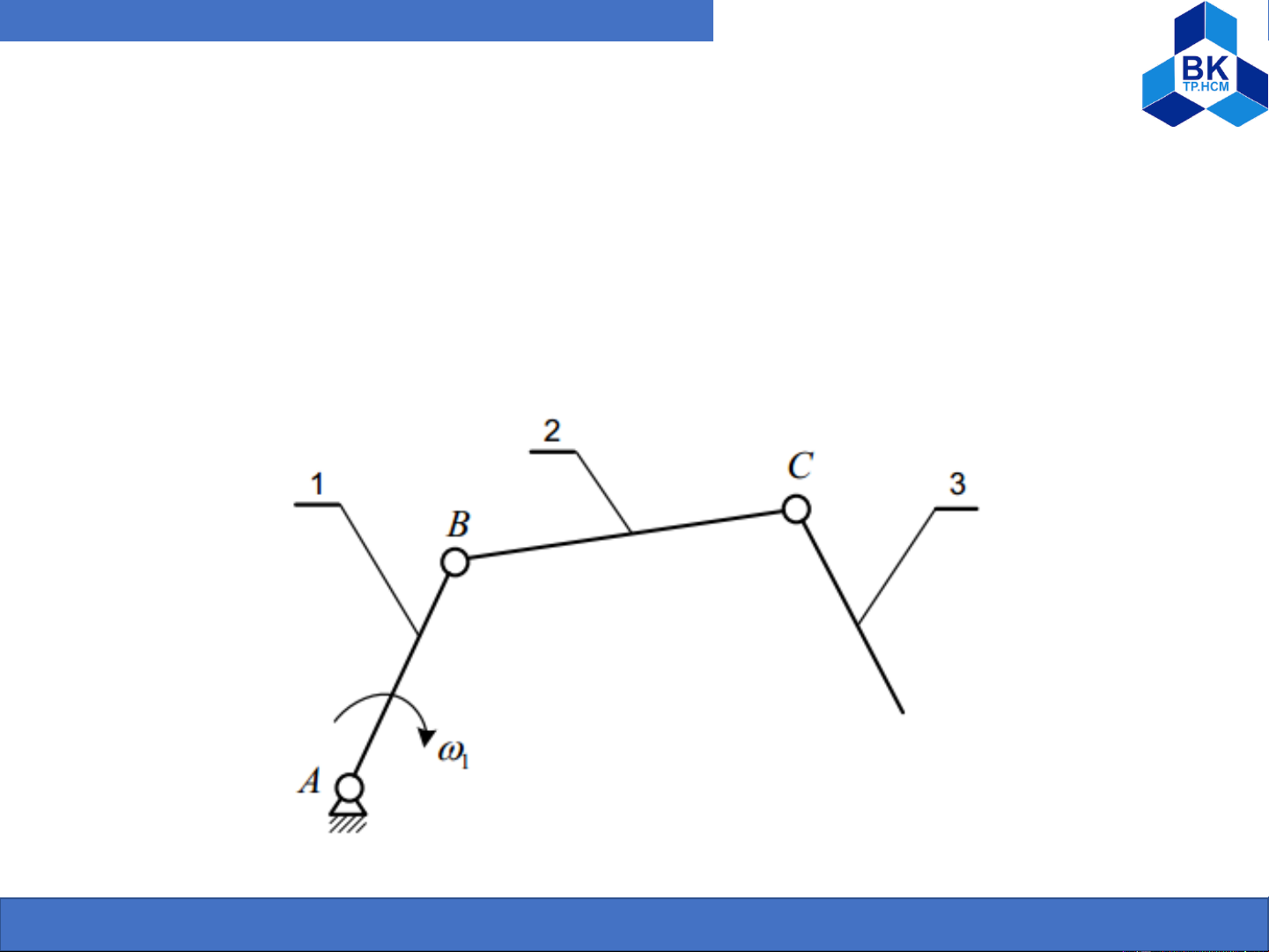
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.5 Kinematic chain and classification of kinematic chain
- Open kinematic chain : Links aren’t connected together into one or more closed
perimeters (some links only participate in one dynamic joint) 19
Department of Machine Design - Faculty of Mechanical Engineering
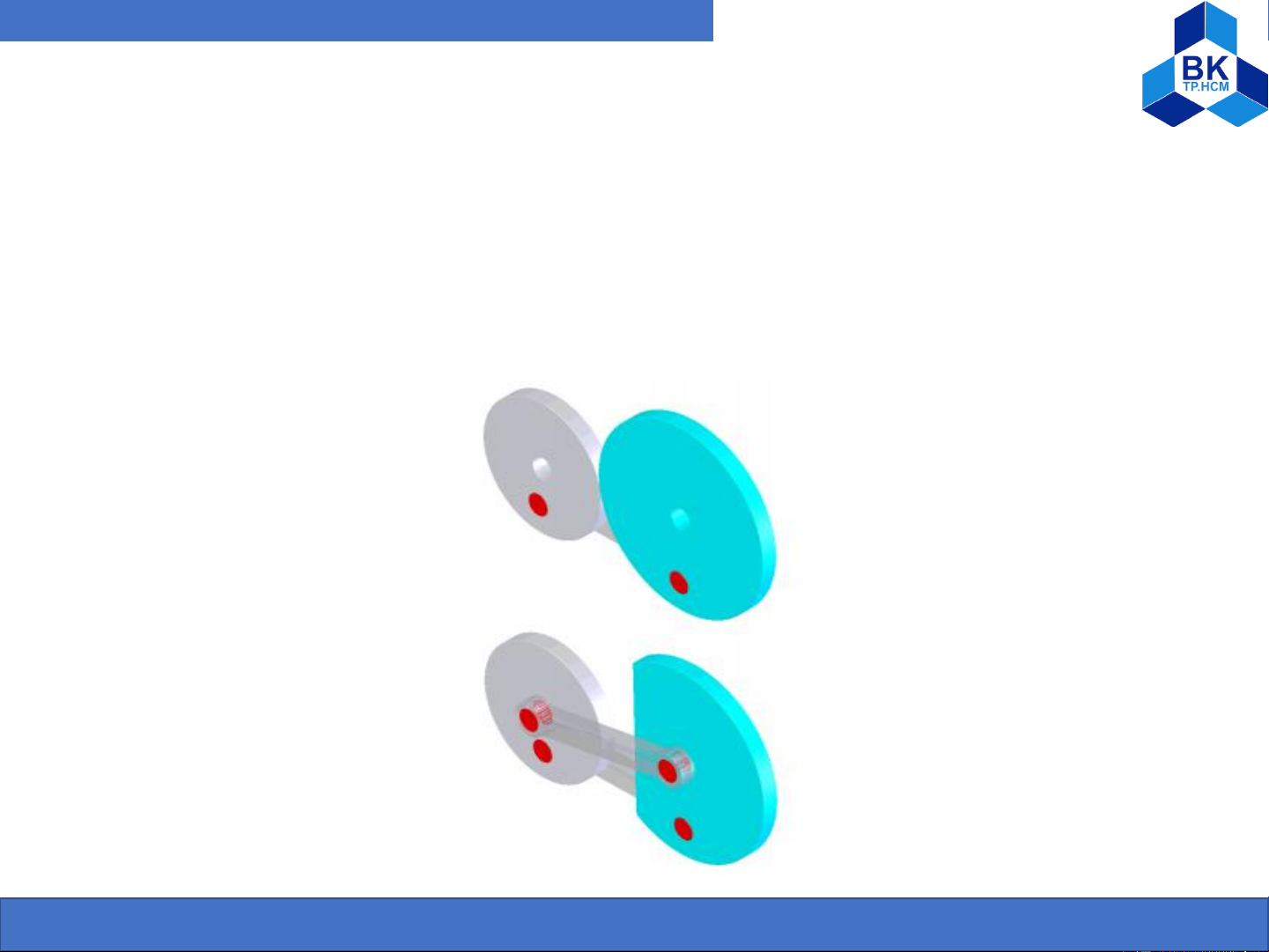
Ho Chi Minh City University of Technology (HCMUT), VNU-HCM 1. Basic Definitions
1.5 Kinematic chain and classification of kinematic chain
- Planar kinematic chain : Links move in the same plane or parallel planes. 20
Department of Machine Design - Faculty of Mechanical Engineering
Tài liệu liên quan:
-

1001 câu hỏi ôn tập môn Hóa đại cương | Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh
22 11 -
Bài tập Độ tan hợp chất nhóm IA + IIA môn Hoá học đại cương | Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh
35 18 -

Bài tập đúng/sai nâng cao môn Hoá đại cương | Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh
42 21 -
Bài tập Hóa hữu cơ | Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh
38 19 -
Sách thí nghiệm hóa đại cương và ứng dụng trong thực tế | Hóa Đại Cương | Trường Đại học Bách khoa - Đại học Quốc gia Thành phố Hồ Chí Minh
35 18