Bài giảng Kỹ thuật đo lường và điều khiển tự động môn Công nghệ sinh học | Trường Đại học Bách Khoa Hà Nội
Bài giảng Kỹ thuật đo lường và điều khiển tự động môn Công nghệ sinh học. Tài liệu được sưu tầm gồm 46 trang, giúp các bạn nắm vững kiến thức, rèn luyện kỹ năng và đạt được kết quả tốt trong học tập. Mời các bạn đón xem!
Môn: Công nghệ sinh học ( BHA) 12 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.7 K tài liệu
Tác giả:
Preview text:
2/20/2024 1
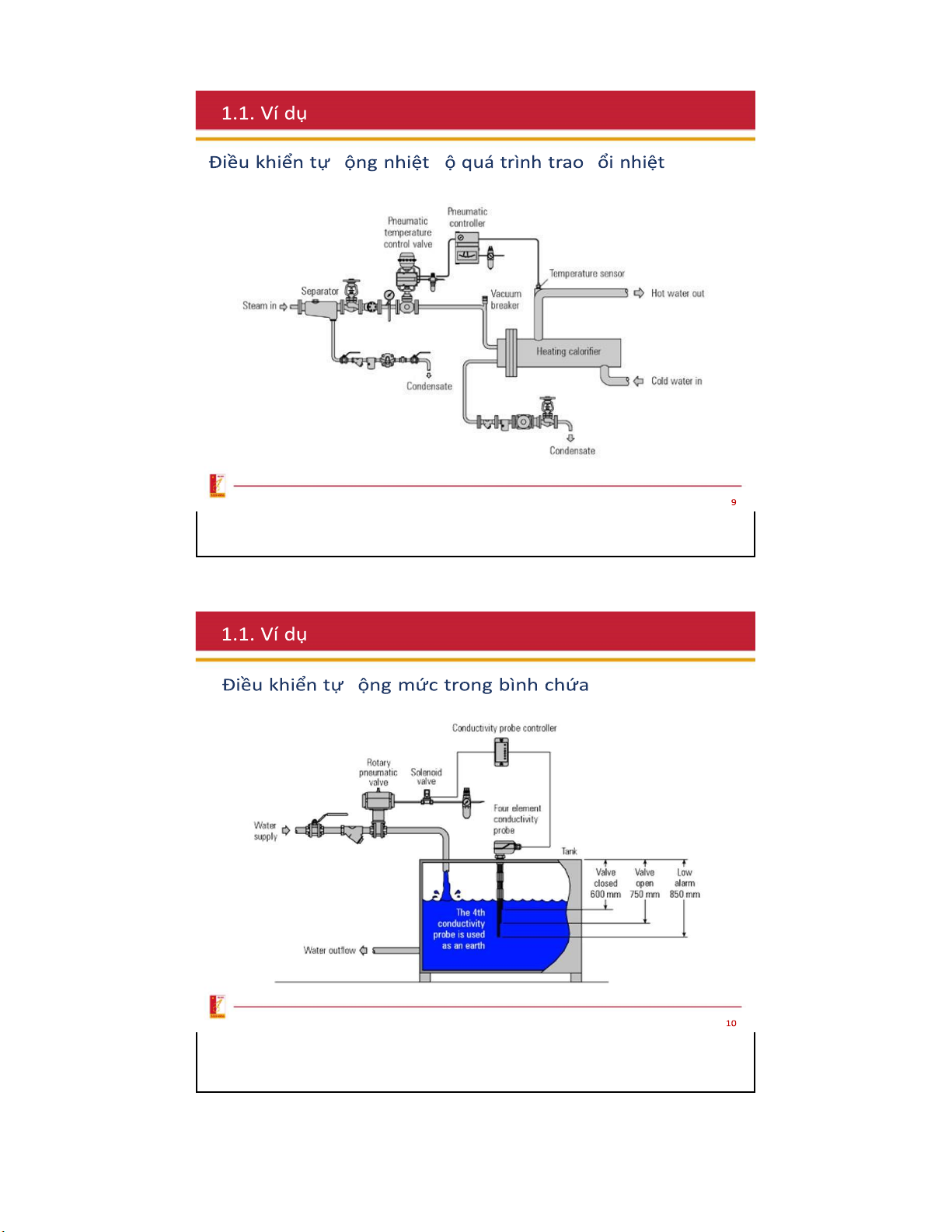
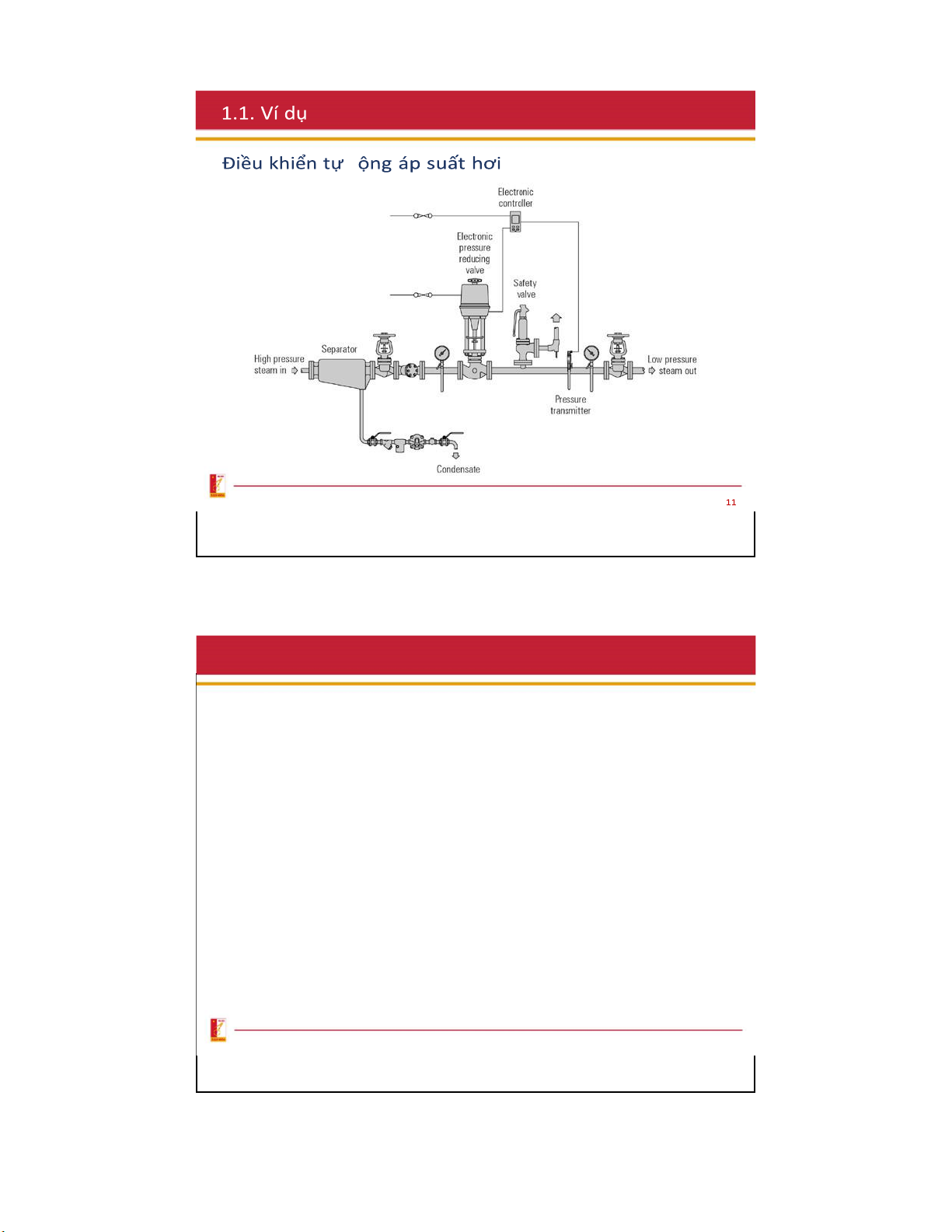
Nguyễn Minh Hệ (2017). Điều khiển tự ộng quá trình công nghệ sinh học – thực phẩm. NXB 2 1 2/20/2024 3 4 2 2/20/2024 Cảm biến thu thập Đưa ra phản hồi
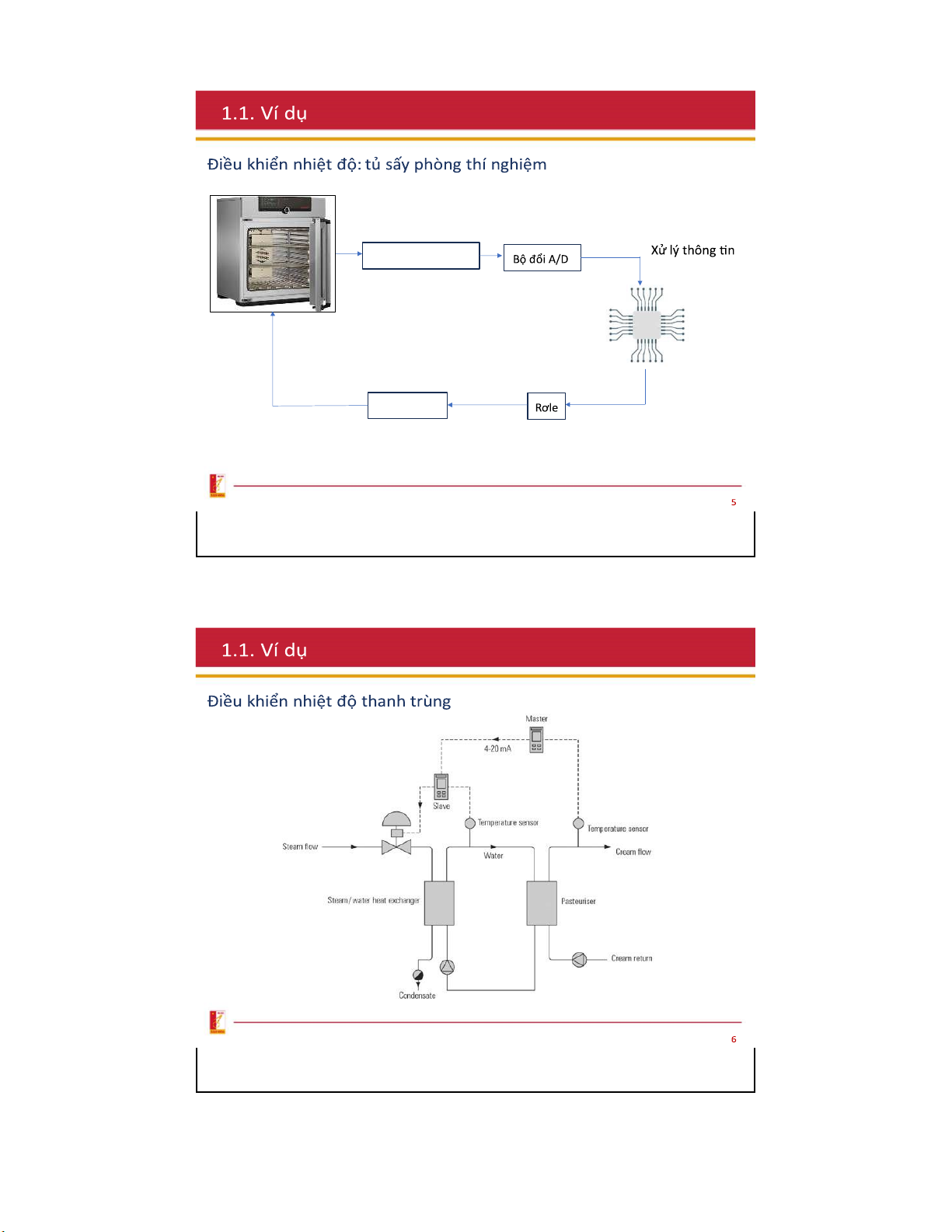
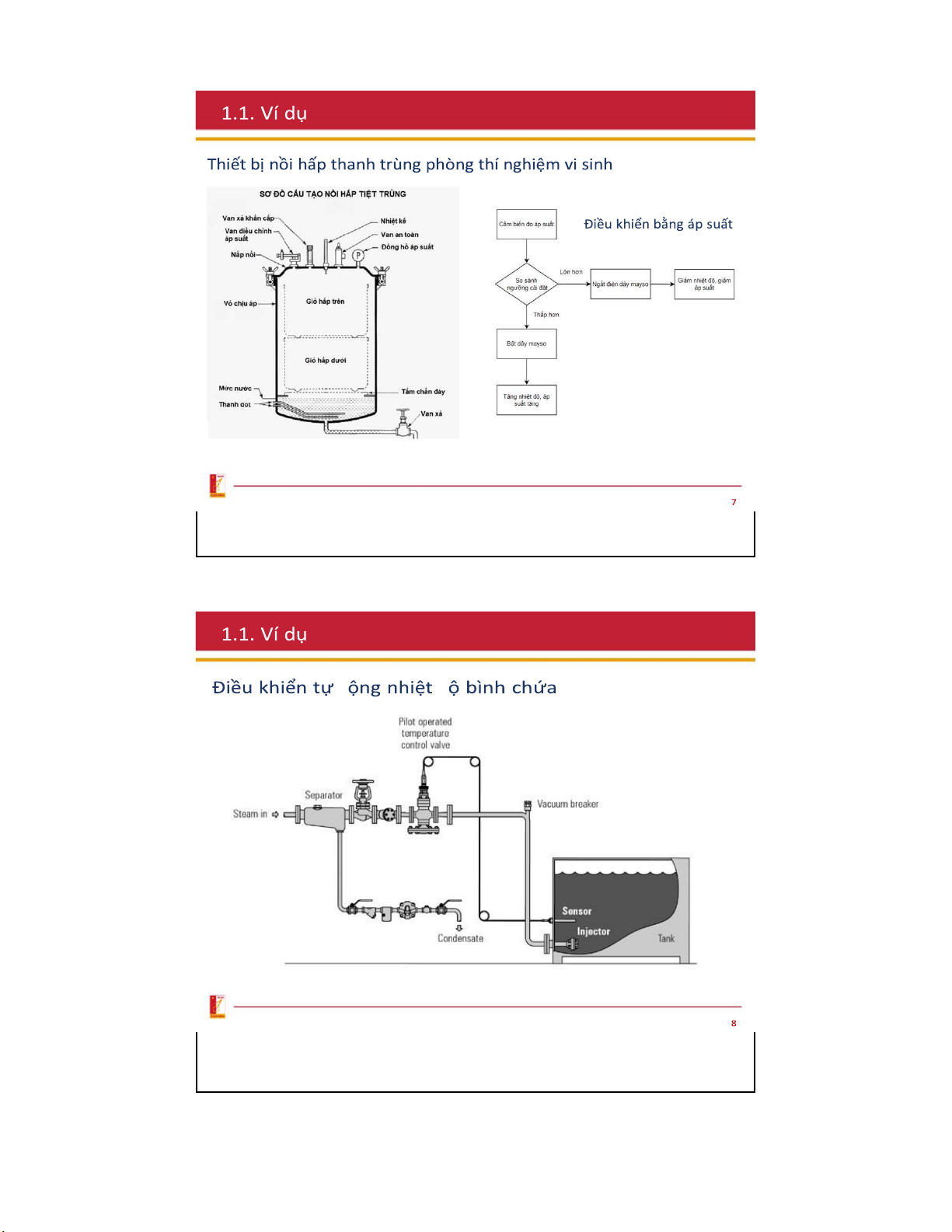
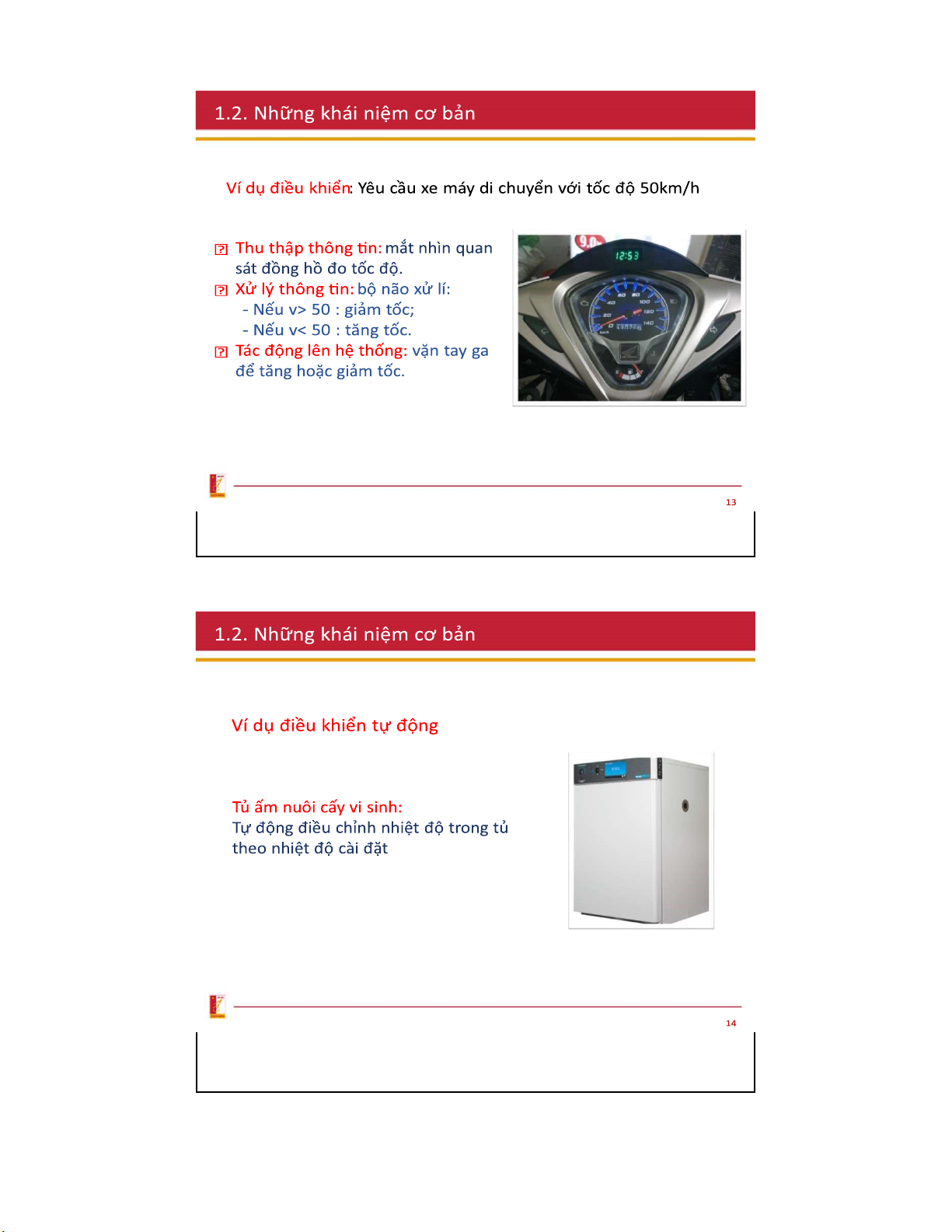
Quạt thổi không khí nóng Dây mayso 5 6 3 2/20/2024 7 8 4 2/20/2024 9 10 5 2/20/2024 11
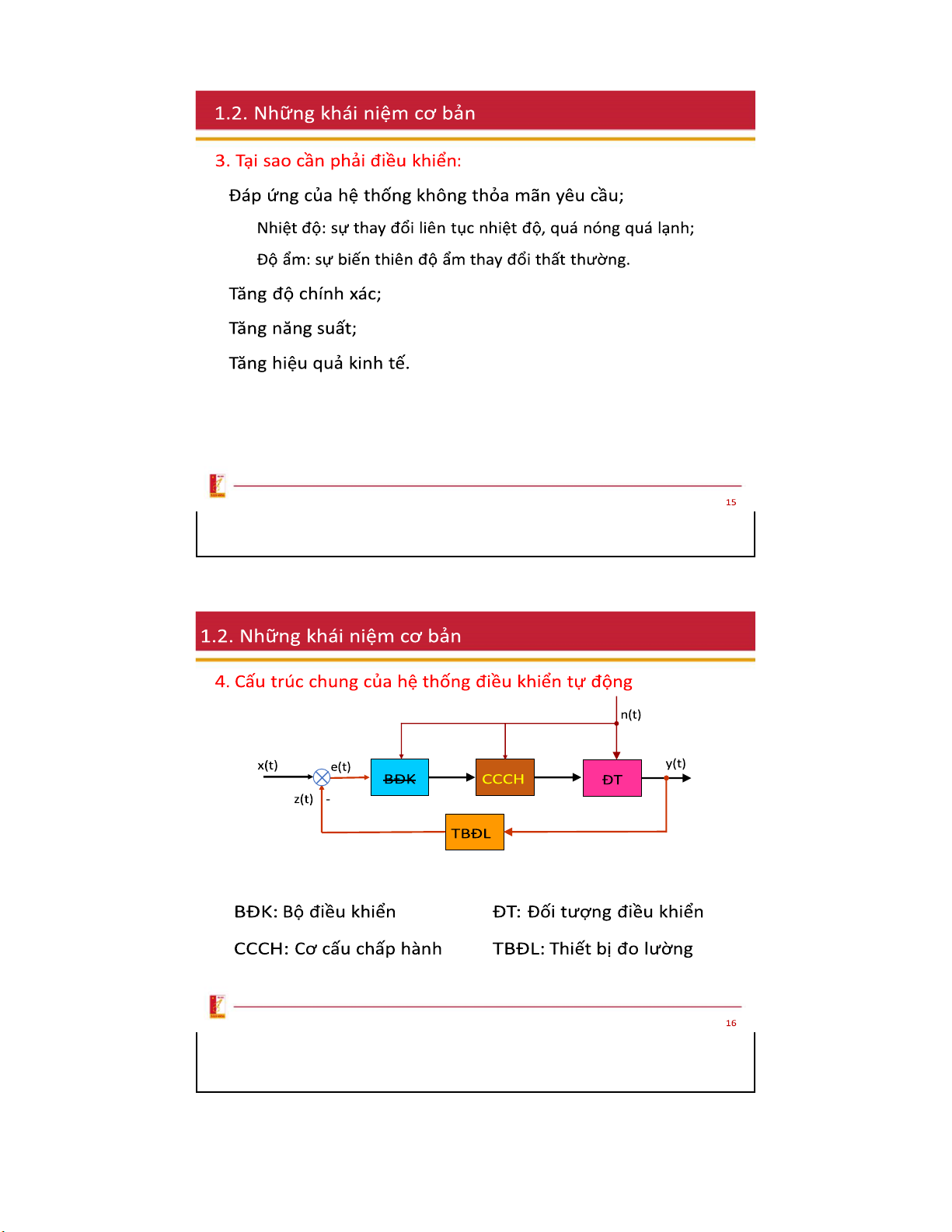
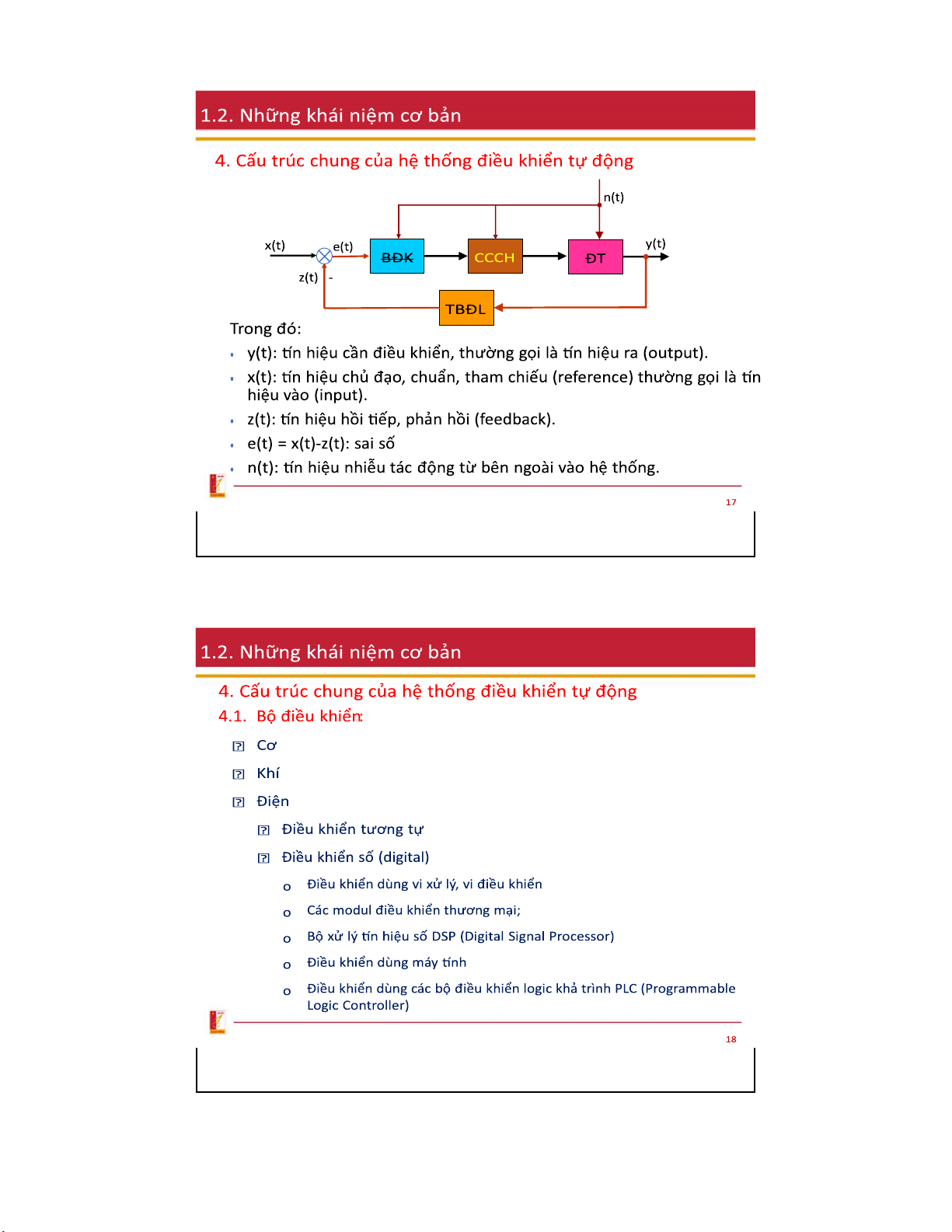
1.2. Những khái niệm cơ bản 1. Điều khiển
Điều khiển là quá trình thu thập thông tin, xử lý thông tin và tác
động lên hệ thống để đáp ứng của hệ thống đạt được với mục đích định trước.
2. Điều khiển tự động:
Là cơ sở lý thuyết của điều khiển học kỹ thuật. Điều khiển tự
động là thuật ngữ chỉ quá trình điều khiển một đối tượng trong
kỹ thuật mà không có sự tham gia của con người (automatic) nó
ngược lại với quá trình điều khiển thủ công (manual). 12 12 6 2/20/2024 13 14 7 2/20/2024 ‒ ‒ ‒ ‒ ‒ ‒ 15 16 8 2/20/2024 17 18 9 2/20/2024 19 20 10 2/20/2024 21 22 11 2/20/2024 23 24 12 2/20/2024 25 26 13 2/20/2024
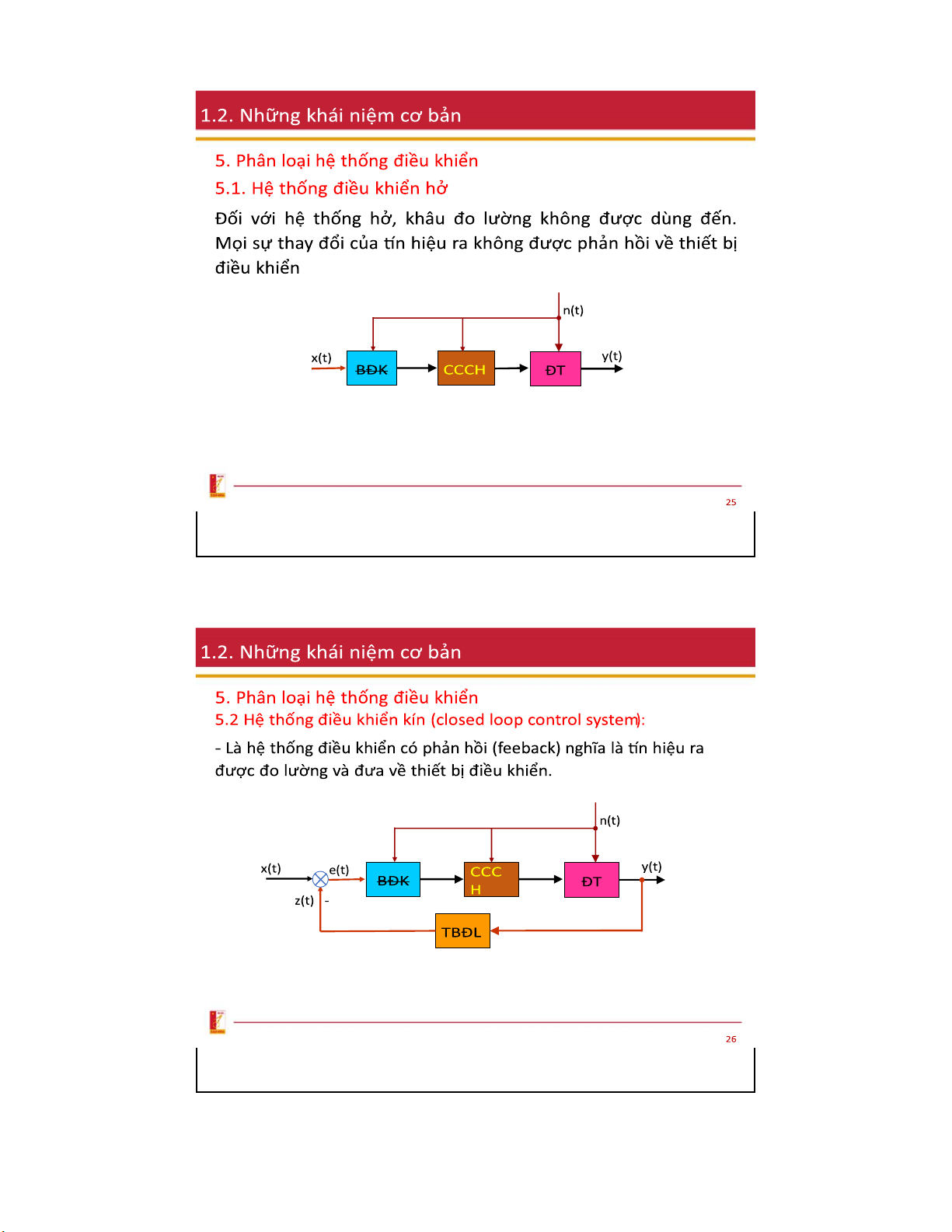
1.2. Những khái niệm cơ bản
6. Hệ thống tuyến tính và hệ thống phi tuyến
• Hệ thống tuyến tính là hệ thống thỏa mãn nguyên lý xếp chồng (còn gọi
là nguyên lý chồng chập):
“Đáp ứng của tổng các tín hiệu đầu vào bằng tổng của các đáp ứng với các
tín hiệu đầu vào riêng lẻ”
• Hệ thống phi tuyến: Là hệ thống không phải hệ thống tuyến tính.
Có thể nói hầu hết các hệ thống vật lý đều là hệ phi tuyến, có nghĩa là
trong hệ thống có ít nhất một phần tử là phần tử phi tuyến.
Tuy nhiên, nếu phạm vi thay đổi của các biến hệ thống không lớn, hệ
thống có thể được tuyến tính hóa trong phạm vi biến thiên của các biến tương đối nhỏ. 27 27
1.3. Bài toán cơ bản trong lĩnh vực điều khiển Phân tích hệ thống:
Cho hệ thống tự động đã biết cấu trúc và thông số.
→ Hãy tìm đáp ứng của hệ thống, đánh giá tính điều khiển được, ổn định và
chất lượng của hệ thống. Thiết kế hệ thống:
Biết cấu trúc và thông số của đối tượng điều khiển,
→ Cần thiết kế bộ điều khiển để được hệ thống thỏa mãn các yêu cầu về chất lượng. Nhận dạng hệ thống:
Chưa biết cấu trúc và thông số của hệ thống.
→ Vấn đề đặt ra là xác định cấu trúc và thông số của hệ thống. 28 28 14 2/20/2024 29 30 15 2/20/2024 31 32 16 2/20/2024 33
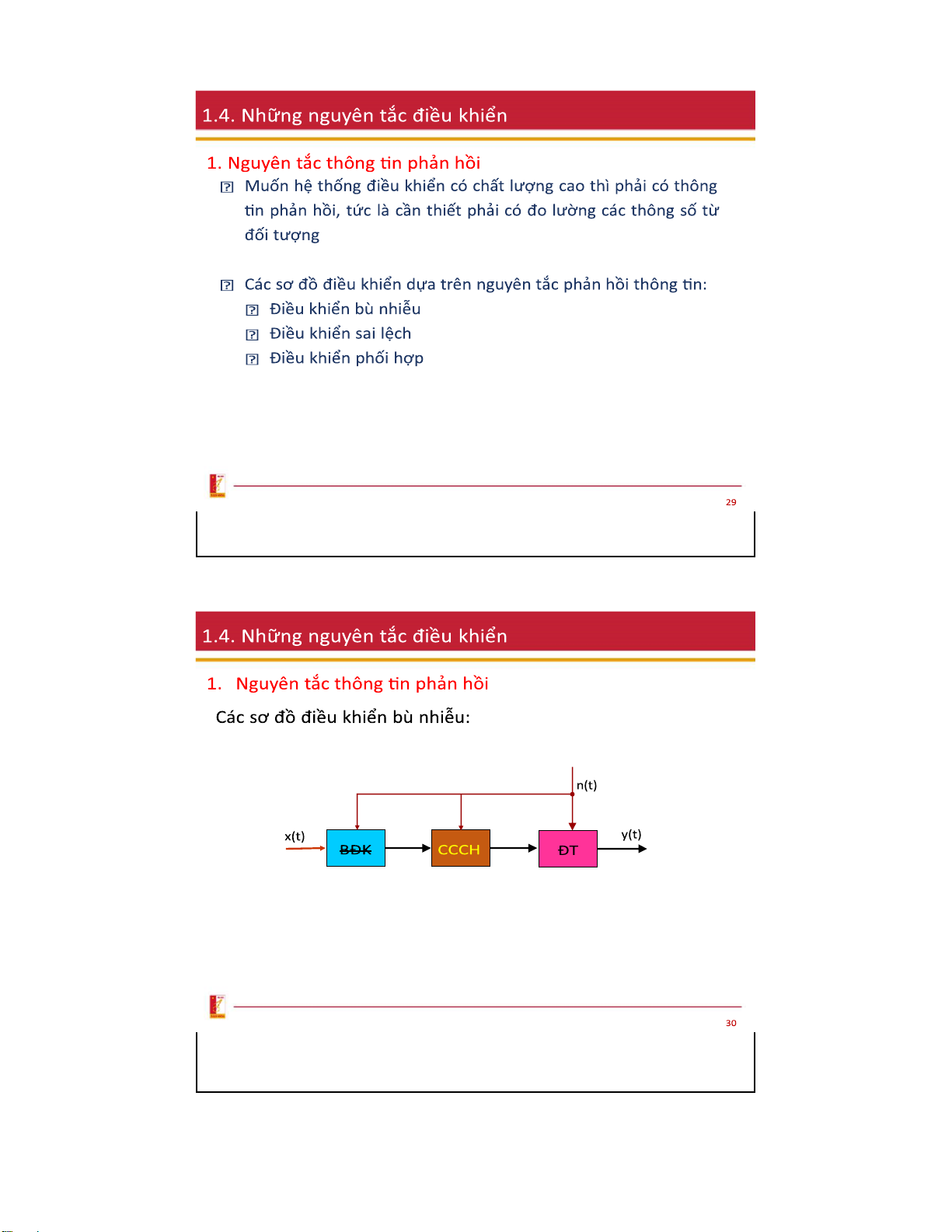
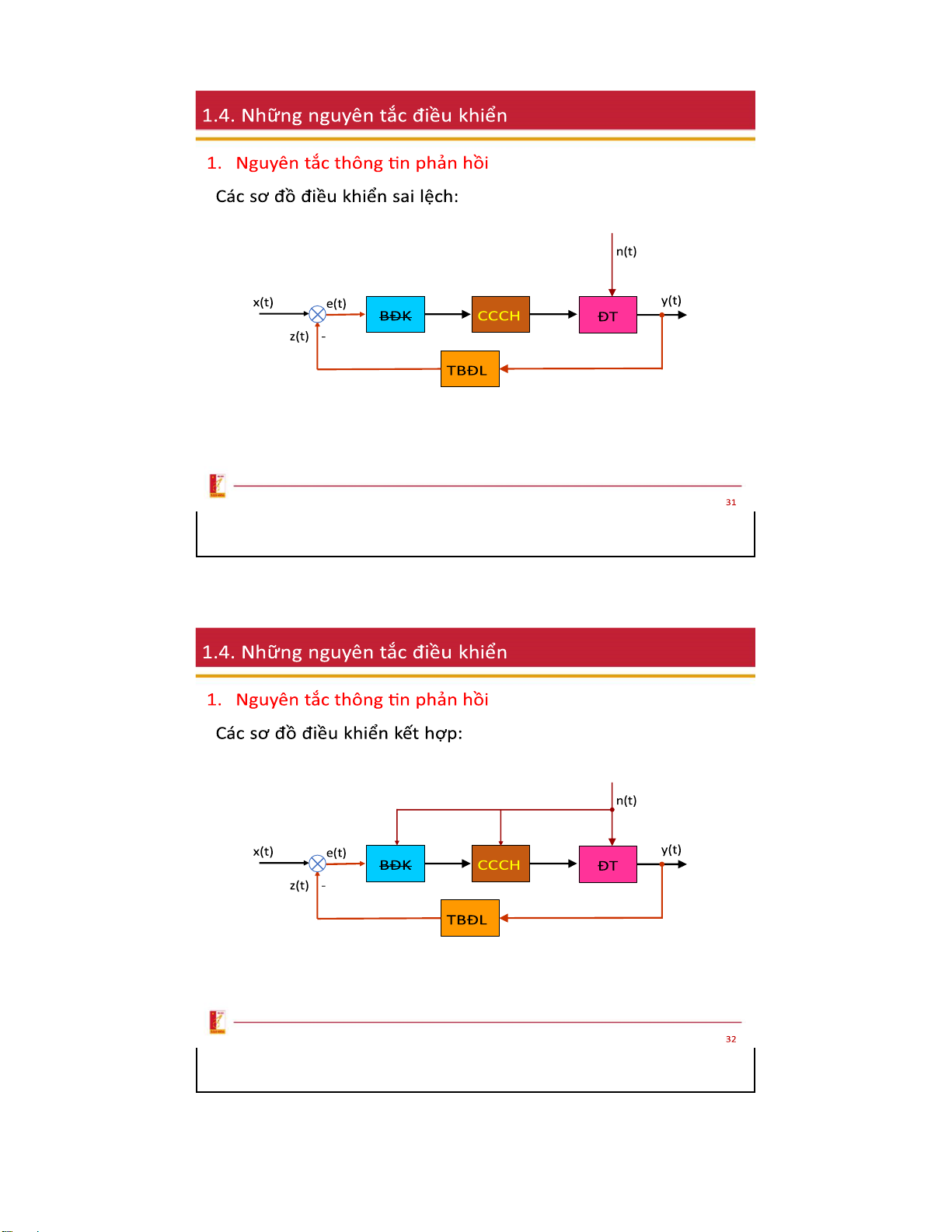
1.4. Những nguyên tắc điều khiển
3. Nguyên tắc bố sung ngoài
Một hệ thống luôn tồn tại và hoạt động trong môi trường cụ thể và có
tác động qua lại chặt chẽ với môi trường đó. Nguyên tắc bổ sung ngoài
thừa nhận có một đối tượng chưa biết tác động và hệ thống và ta phải
điều khiển cả hệ thống đã biết và hệ thống chưa biết
Ý nghĩa: Cần thiết kế bộ điều khiển xử lý được các nhiễu tác động (nói
cách khác là không thể bỏ qua nhiễu tác động). 34 34 17 2/20/2024
1.4. Những nguyên tắc điều khiển 4. Nguyên tắc dự trữ
Một hệ thống điều khiển ổn định phải luôn coi các thông tin là chưa đầy
đủ và phải luôn đề phòng các bất trắc xảy ra. Không được dùng toàn bộ
lực lượng trong điều kiện bình thường. Cần có các phương án dữ trữ mà
không sử dụng trong điều kiện bình thường nhưng để đảm bảo hệ thống vận hành an toàn.
Ý nghĩa: Cần lường trước tất cả các tình huống xảy ra và đưa vào thiết kế cho bộ điều khiển. 35 35 36 18 2/20/2024
1.5. Phân loại hệ thống ĐKTĐ
1. Phân loại dựa trên mô tả toán học của hệ thống
Hệ thống liên tục: Hệ thống được mô tả bằng phương trình vi phân
Hệ thống rời rạc: Hệ thống được mô tả bằng phương trình sai phân
Hệ thống tuyến tính: Hệ được mô tả bởi hệ phương trình vi phân/sai phân tuyến tính
Hệ thống phi tính: Hệ được mô tả bởi hệ phương trình vi phân/sai phân phi tính
Hệ thống bất biến theo thời gian: Hệ số của phương trình vi phân/sai
phân mô tả hệ thống không đổi.
Hệ thống biến đổi theo thời gian: Hệ số của phương trình vi phân/sai
phân mô tả hệ thống thay đổi theo thời gian. 37 37
1.5. Phân loại hệ thống ĐKTĐ
2. Phân loại theo chiến lược điều khiển
Mục tiêu điều khiển thường gặp nhất là sai số giữa tín hiệu ra và tín
hiệu vào chuẩn càng nhỏ càng tốt. Dựa theo các dạng tín hiệu vào ta
có các loại điều khiển sau:
Điều khiển ổn định hóa: Nếu tín hiệu chuẩn r(t) = const, ta gọi là điều khiển ổn định hóa
Điều khiển theo chương trình: Tín hiệu vào r(t) là hàm thay đổi theo
thời gian nhưng đã biết trước
Điều khiển theo dõi: Tín hiệu vào r(t) là hàm không biết trước theo thời gian. 38 38 19 2/20/2024 39 40 20
Tài liệu liên quan:
-

Bài giảng Chương 2. Cơ sở lý thuyết và các quá trình cơ bản trong sản xuất thực phẩm môn Công nghệ thực phẩm đại cương | Đại học Bách Khoa Hà Nội
25 13 -

Bài giảng Chương 2. Cơ sở lý thuyết và các quá trình cơ bản trong sản xuất thực phẩm (tiếp theo) môn Công nghệ thực phẩm đại cương | Đại học Bách Khoa Hà Nội
31 16 -

Câu hỏi ôn tập Kỹ thuật hấp phụ và cô đặc môn Công nghệ sinh học | Trường Đại học Bách Khoa Hà Nội
82 41 -

Khái niệm và phân tách hệ không đồng nhất môn Công nghệ sinh học | Trường Đại học Bách Khoa Hà Nội
96 48