Bài giảng thực hành lắp đặt xe tự hành môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
Arduino là nền tảng giúp phát triển các ứng dụng vi điều khiển nhanh và thuận tiện. Ứng dụng rộng rãi trong các thiết kế (cả nghiên cứu lẫn thương mại). Tài liệu được sưu tầm gồm 34 trang, giúp các bạn nắm vững kiến thức, rèn luyện kỹ năng và đạt được kết quả tốt trong học tập. Mời các bạn đón xem!
Môn: Nhập môn Cơ điện tử CTTT (Fundamental of Mechatronics) 12 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:


Preview text:
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
UNIVERSITY OF SCIENCE AND TECHNOLOGY
BÀI GIẢNG THỰC HÀNH
NHẬP MÔN CƠ ĐIỆN TỬ TS. BÙIĐÌNHBÁ
BM cơđiệntử-ViệnCơkhí–ĐHBK Hànội
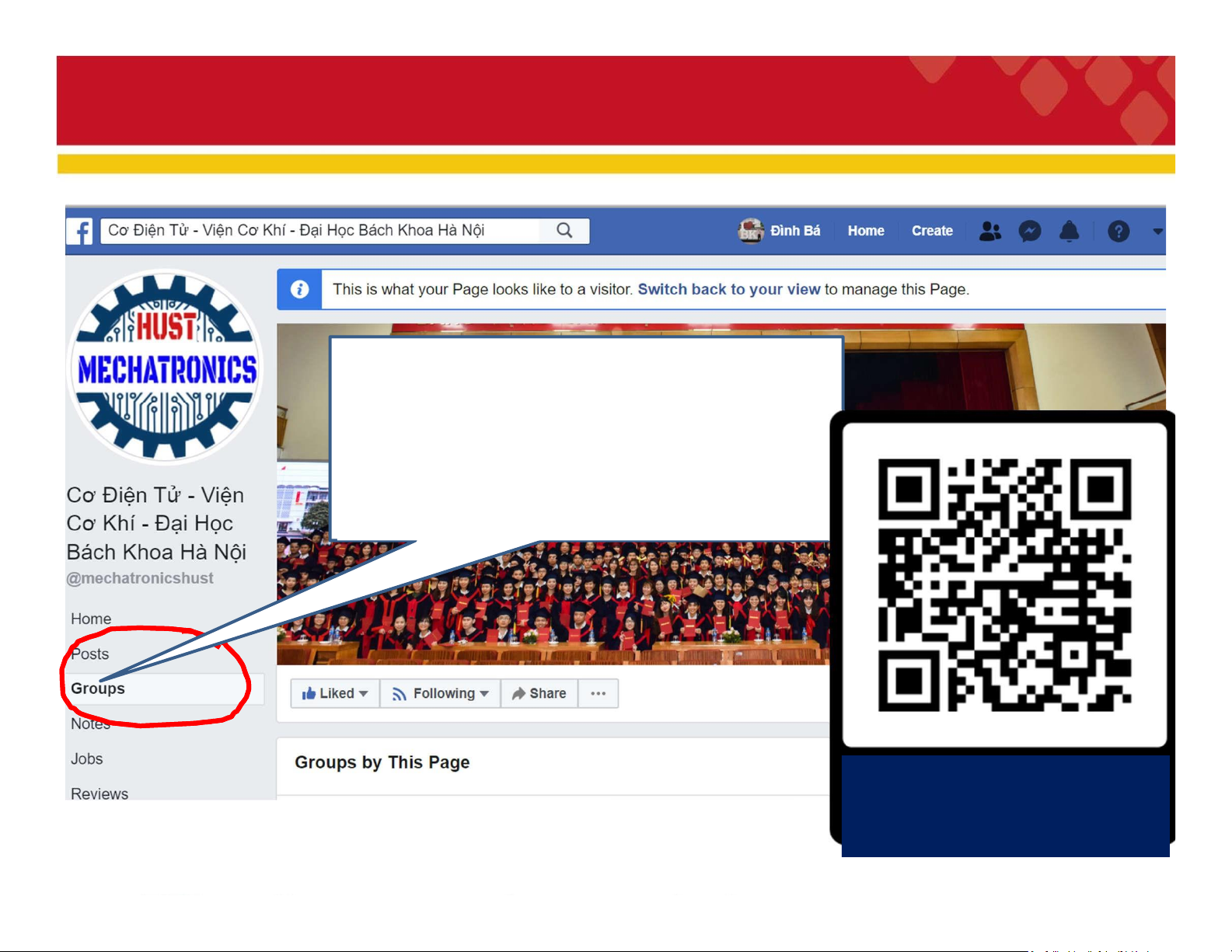
Cácbạnlike page Cơ Điện Tử -
Viện Cơ Khí -Đại Học Bách
Khoa Hà Nộisauđóbấmvào mục Groups ( Nhóm) QR CODE Page Cơ Điện Tử 1
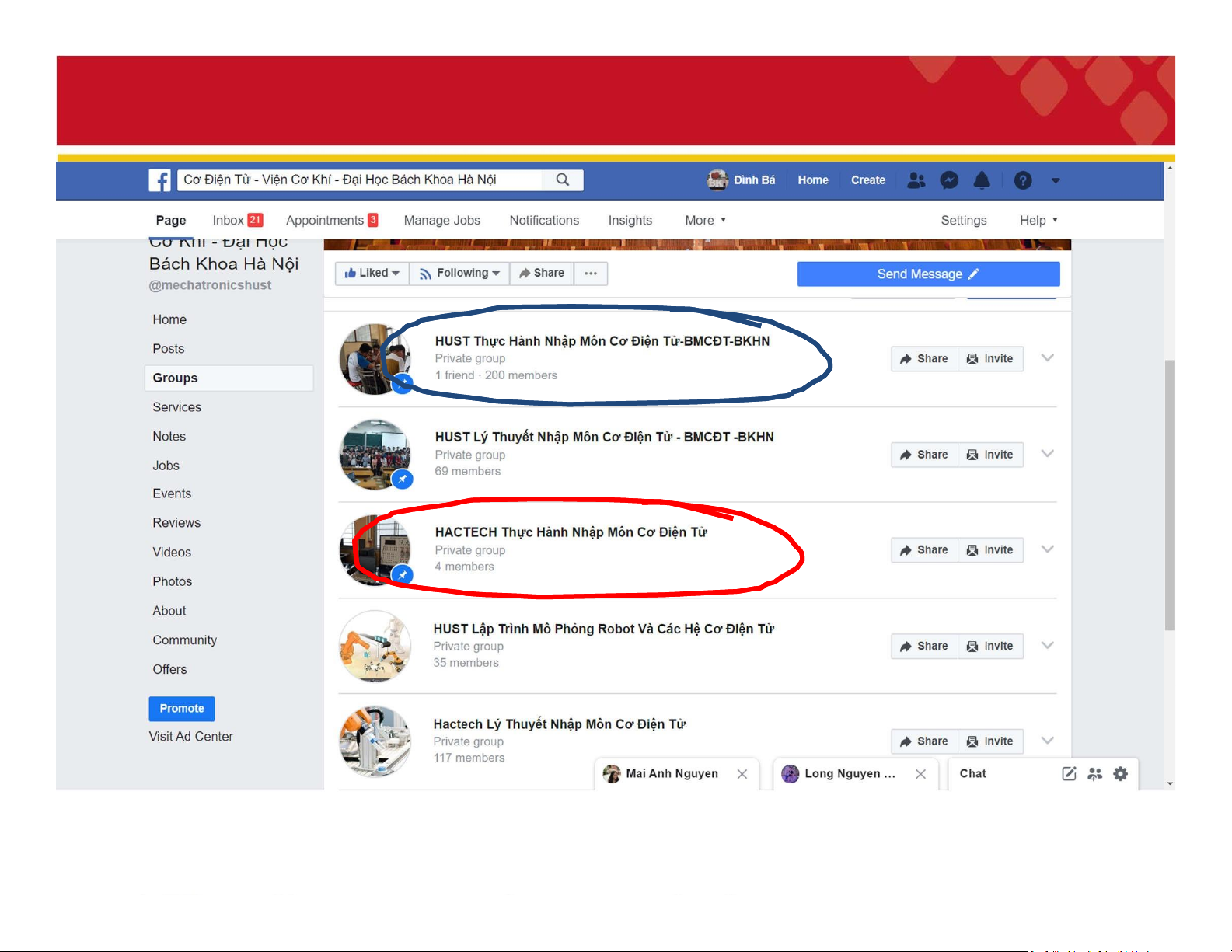
CácbạnSinhViệnĐạiHọcBáchKhoa Join GROUP HUST Thực HànhNhậpMônCơĐiệnTử
CácbạnSinhViệnCao ĐẳngNghềBáchKhoa thamgia
GROUP HACTECH ThựcHànhNhậpMônCơĐiệnTử 1
Nhữngchúý khithựchành
Nhữngchúý trướckhilắpráp
1. Lắp2độngcơvàhộpchứapintrước,sauđóLắpcácdâyvà
thiếtbị, thầykiểmtraokrồimớiđượclắppin vàovànạpchương trìnhchạythử.
2. Nhữnghìnhvẽdâynốichỉmangtínhchấtminhhọa. Cácbạnnối
dâytheobảngởbêncạnhmỗihình.
3. BócgiấyphủởtấmMica
đểthànhtấmtrong,dễdànghợptrong việclắpđặtđidây.
4. Dâyđiệnnốivớiđộngcơhaybịđứtnêndùngbăngdínhđencố địnhlại.(Ảnh) Giới thiệu chung
BÀI THỰC HÀNH HỌC PHẦN NHẬP MÔN CƠ ĐIỆN TỬ
• Mã học phần: ME 2002
• Nội dung: Lắp đặt Xe tự hành • Số bài: 3
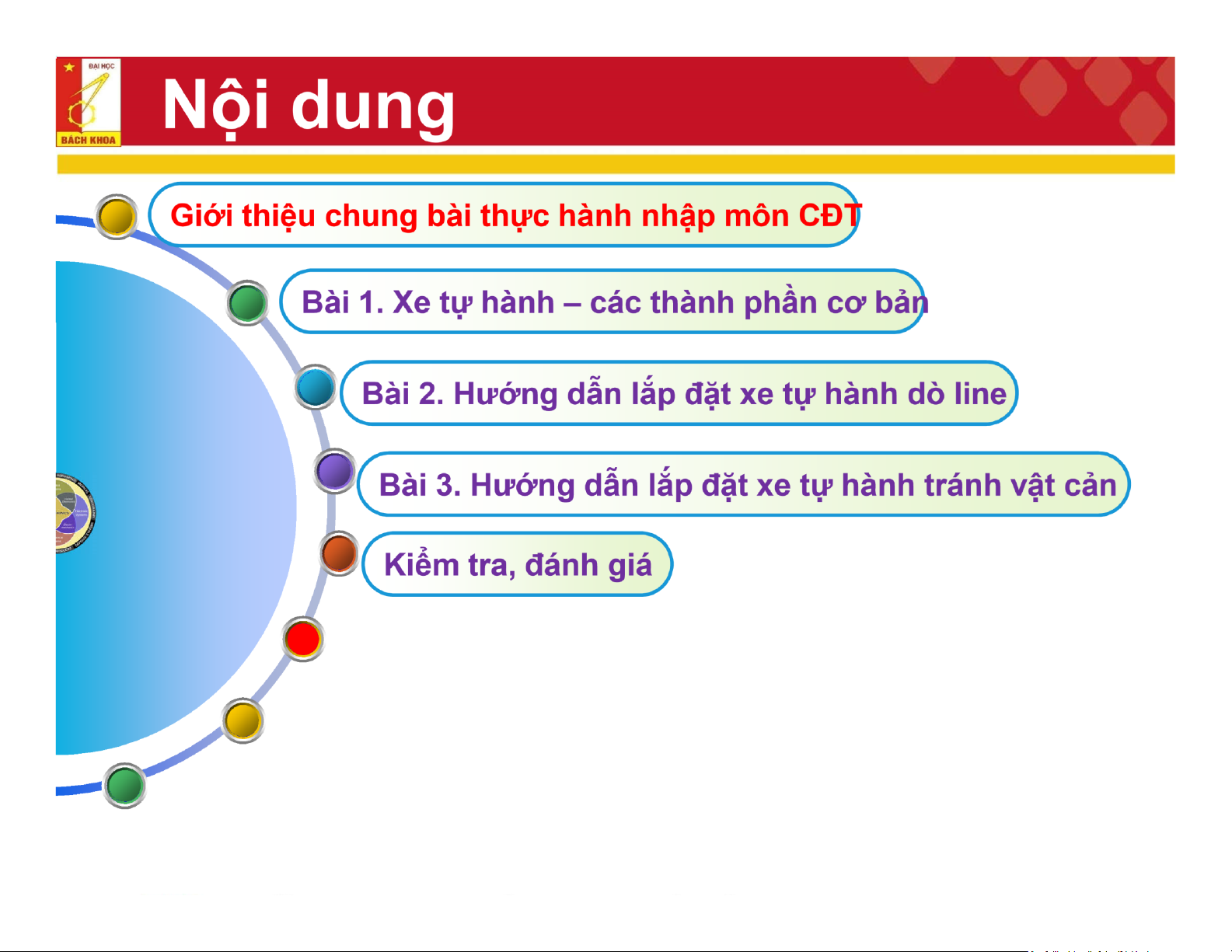
➢ Bài 1: Thành phần cơ bản xe tự hành.
➢ Bài 2: Hướng dẫn về xe tự hành dò line.
➢ Bài 3: Hướng dẫn về xe tự hành tránh vật cản. ▪ Số buổi: 5
➢ Buổi 1: Giới thiệu chung bài thực hành nhập môn CĐT; Xe tự hành – các thành phần cơ bản.
➢ Buổi 2: Nguyên tắc đi dây; Sơ đồ mạch tổng quát. Lắp đặt kết cấu cơ khí.
➢ Buổi 3: Hướng dẫn và lắp đặt chức năng dò line của xe tự hành.
➢ Buổi 4: Hướng dẫn và lắp đặt chức năng tránh vật cản của xe tự hành.
➢ Buổi 5: Bảo vệ, thi.
• Đánh giá: Điểm số.
• Tiêu chí: Bài thi theo sa hình có sẵn. Sinh viên sẽ tự lắp sa hình theo sự hương dẫn.
Mục tiêu bài thực hành
Bài thực hành giúp sinh viên tham gia xây dựng một hệ thống cơ điện tử .
Bao gồm việc sử dụng hệ thống điều khiển, cảm biến, Cơ cấu chấp hành” các
động cơ DC”, và lập trình để kiểm soát một hệ thống cơ điện tử.
Cụ thể là xây dựng một chiếc xe tự hành.
• Tổ hợp một hệ thống lái cho một chiếc xe tự hành (hộp số, động cơ và bánh xe)
• Lắp ráp các linh kiện điện tử, cơ khí trên khung xe
• Tích hợp và kiểm soát các thành phần này sử dụng phần mềm trên nền bộ điều
khiển Arduino Qua đó sinh viên:
• Hiểu được ý nghĩa ứng dụng của vi điều khiển Aduino trong công nghiệp
Hiểu được phương pháp đấu nối các tín hiệu vào/ra động cơ.
• Viết được chương trình điều khiển động cơ, cảm biến (khoảng cách, dò line)
Bài1. Xetựhành–Cácthànhphầncơbản
1. Hệthốngđiềukhiển - MạchArduinoUnoR3 2. Cảmbiến. 2.1 Cảmbiếndòlinethanh 5 . led(LineSensor) 2.2 Cảmbiếnkhoảngcách . ( UltraSonicSensor ) 3. ơ
C cấuchấphành: 3.1.Độngcơ (Motor) + Bánh xe 3.2 . Servo 4 Mạchkhuếchđại . Nguồn - dòngđiện+ Pin
5. Cácthànhphầnkhác
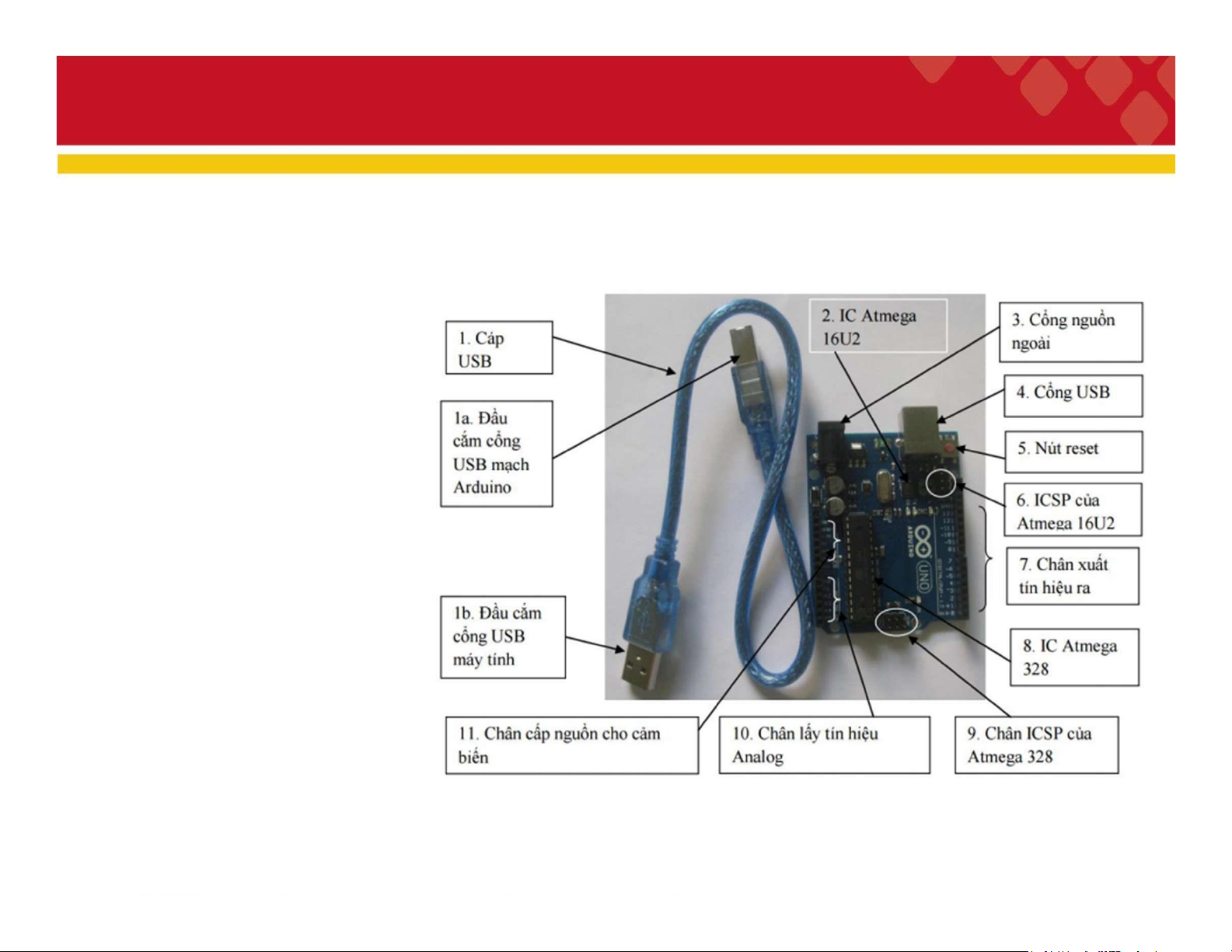
1. Hệthốngđiềukhiển
1 . HỆ THỐNG ĐIỀU KHIỂN SỬ DỤNG MẠCH ARDUINO UNO R 3 • Arduinolànềntảng giúppháttriểncác ứngdụngviđiều khiểnnhanh vàthuận tiện. • Ứngdụngrộngrãi trong cácthiếtkế(cả nghiên cứulẫn thương mại) • Đượchỗtrợbởi cộngđồnglớn • ArduinoUnolà dòngArduinophổ biếnnhất .
1. Hệthốngđiềukhiển
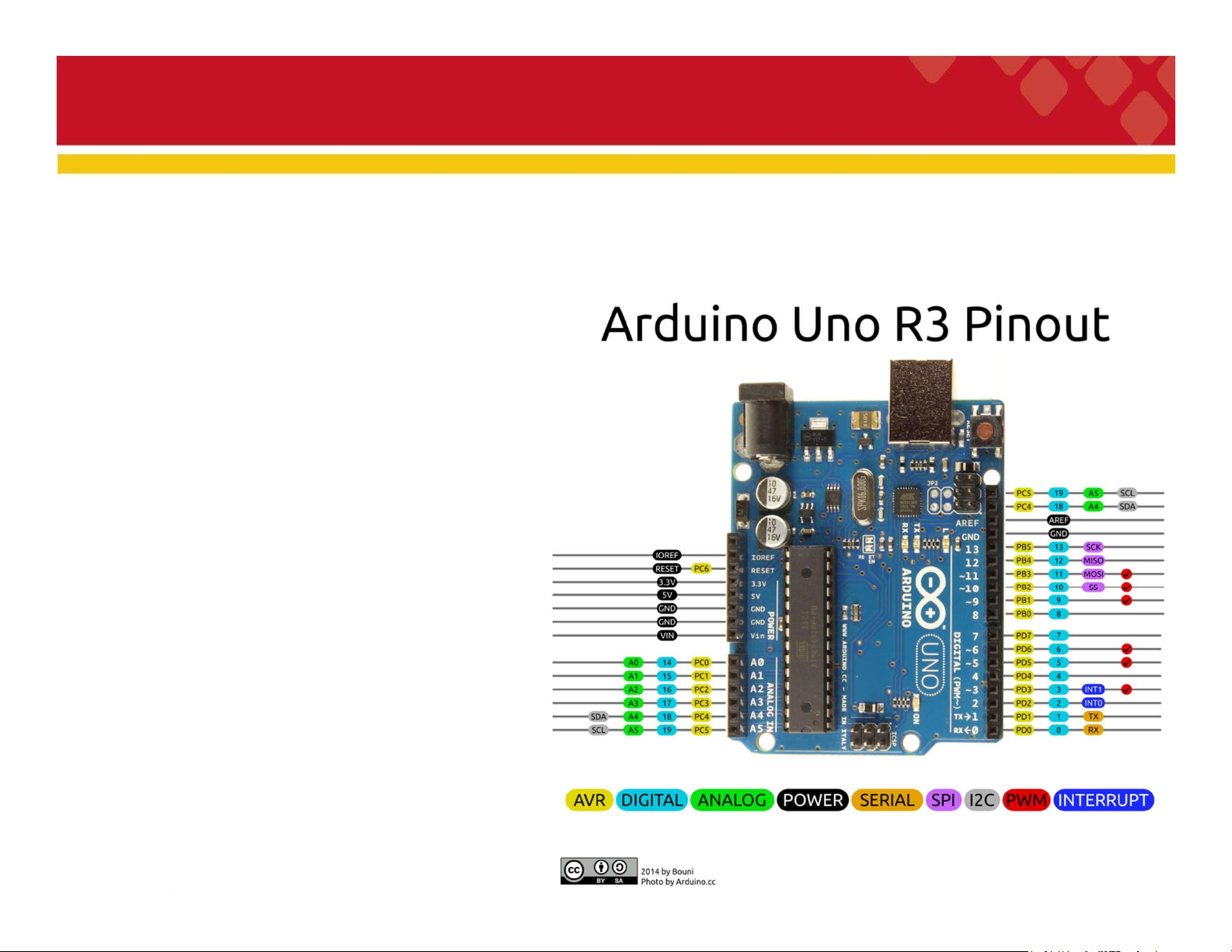
CẤU TẠO CHÂN -MẠCH ARDUINO UNO R3
• Chân giao tiếpDigital(tínhiệu số):
• Có14 chân, từ0 đến13
• Nhữngchân códấu~ (3, 5, 6, 9,
10 ,11) lànhữngchân cóthể
xuấtra xung cóthểthay đổiđộrộng,
đượcứngdụngđểđiều
khiểntốcđộđộngcơ hoặcđộsáng củađèn.
• Chân đọctínhiệuAnalog(tín hiệutương tự):
• Có6 chân, từA0 đếnA5.
• ĐọctínhiệuAnalogtừcảmbiếnđể IC Atmega328 xửlý.
• Chân cấpnguồn:
• Bao gồmcácchân: GND (nối đất/âm), 5V, 3.3V
• Cácchân nàydùngđểcấpnguồn
cho cácthiếtbịbên ngoài
như role, cảmbiến, RC servo,…
• Ngoàira còncócácchân: Vin, Reset, IOREF PHẦN MỀM ARDUINO
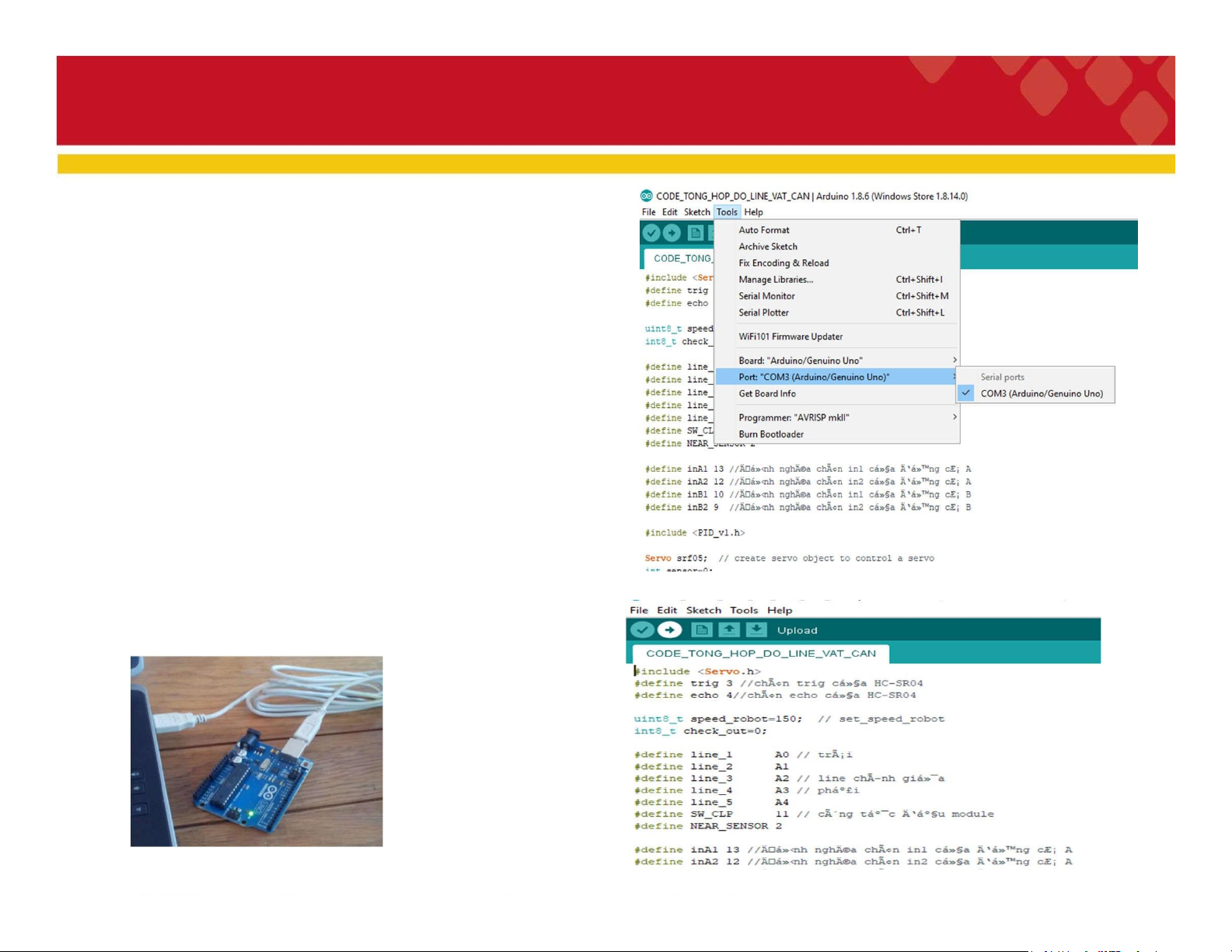
CÀI ĐẶT PHẦN MỀM ARDUINO TảiphầnmềmArdruinoIDE
Bước1: CàiđặtArduino IDE và Arduino
Bước2: KếtnốiArduino và máytínhthôngqua cáp.
Bước3: MởphầnmềmArduino
Bước4: Chọn tool-> port com3 → com3 Bước5: Nạpchươngtrình Upload 2. Cảmbiến
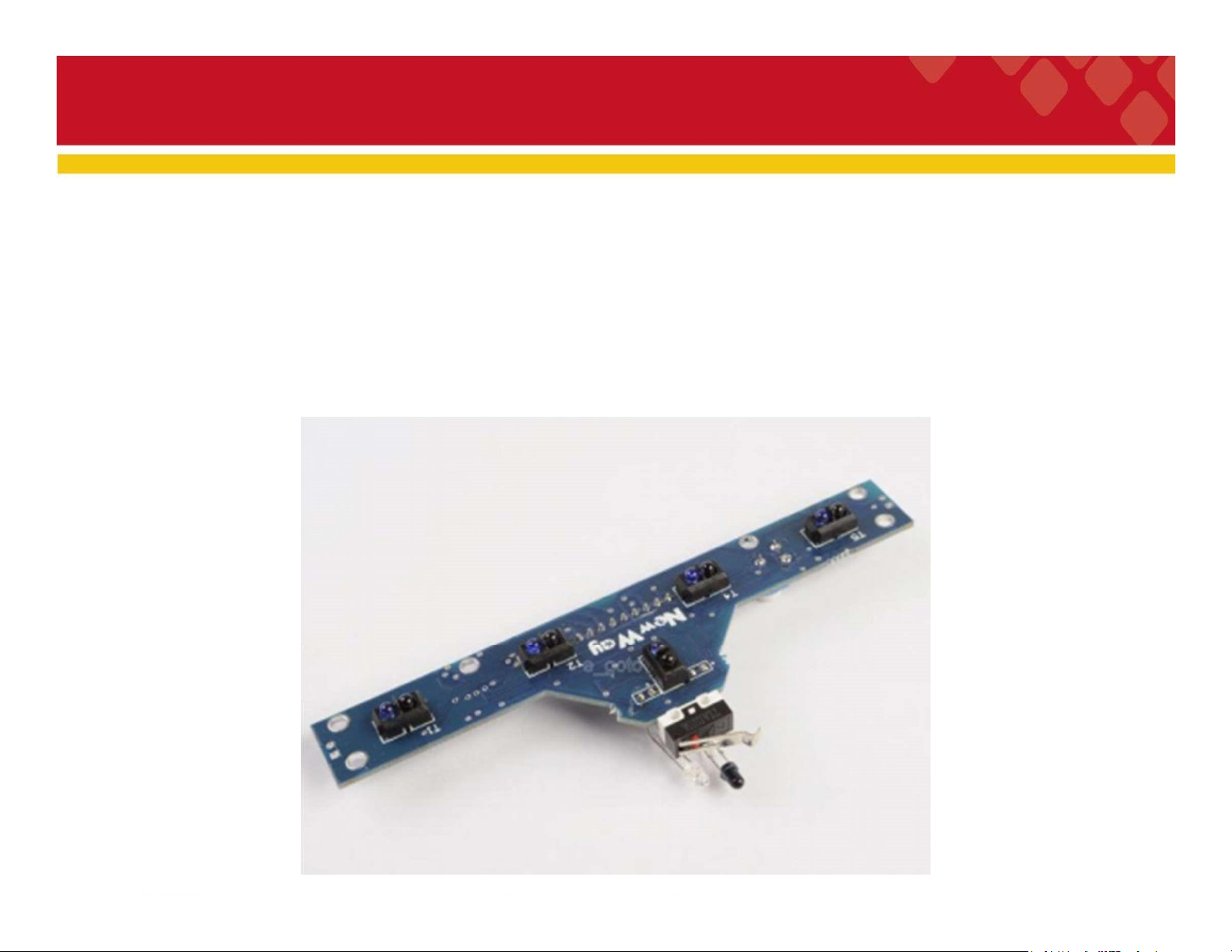
2.1 . CẢM BIẾN DÒ ĐƯỜNG THANH 5 LED BFD 1000
• Pháthiệnvùngmàuđen vàvùngmàusáng
• Hoạtđộngdựatrên nguyên lýcủatia hồngngoại(bịhấpthukhi chiếuvào
bềmặtmàuđenvàphảnxạvớicácbềmặtmàusáng)
• 5 cảmbiếnhồngngoạihướngxuốngđất: cảmbiếnnàonằmtrên vùngmàu
đen sẽcho giátrị 0( ĐènTắt),ngược lại là 1(Đènsáng). Cảmbiến
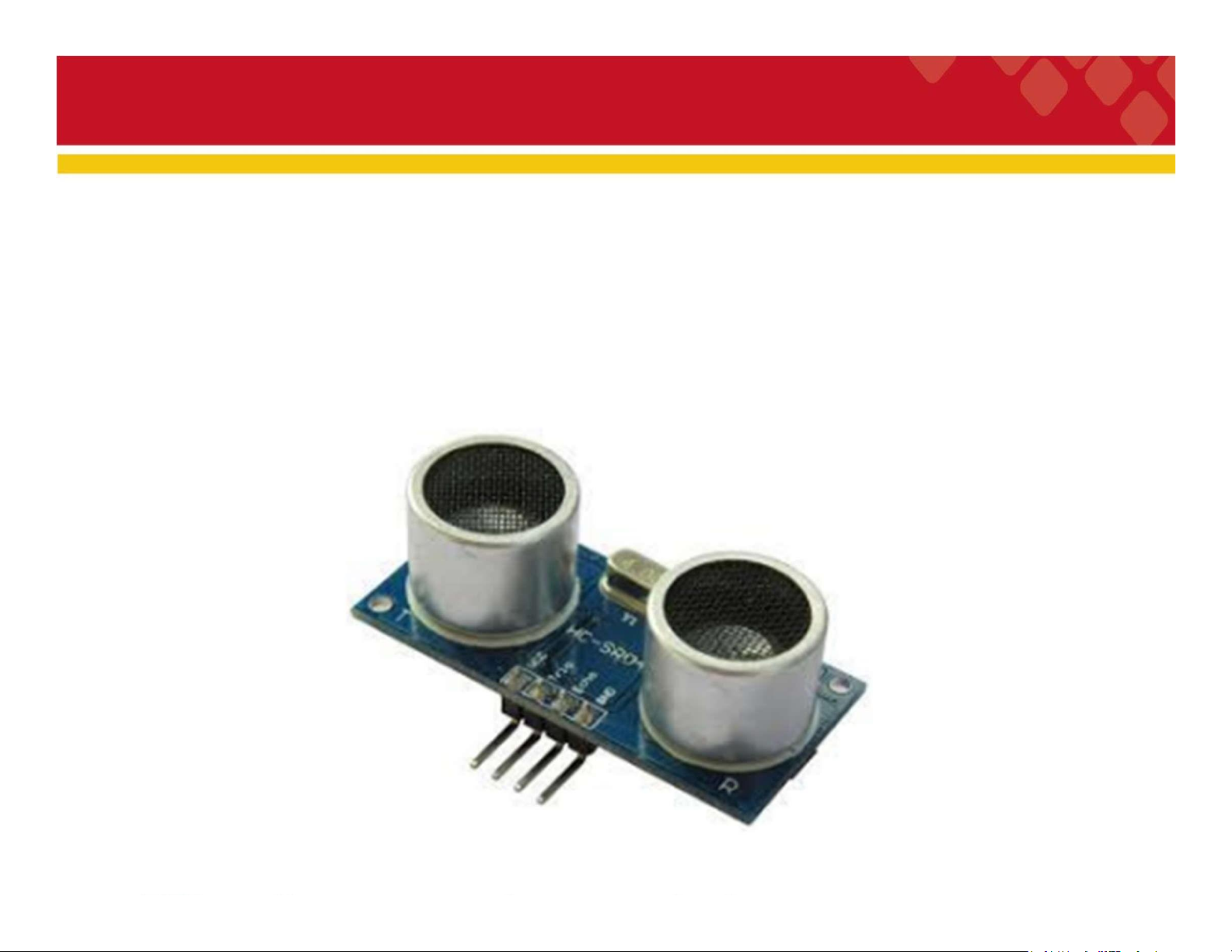
2.2 . CẢM BIẾN TRÁNH VẬT CẢN SR F04 (CẢM BIẾN
ĐO KHOẢNG CÁCH –ULTRASONIC SENSOR)
Đo khoảngcáchđếnvậtcảnnhờđo đạc
thờigian sóngsiêuâm phát ra từ cảm biến và nhận về. 3. Cơcấuchấphành
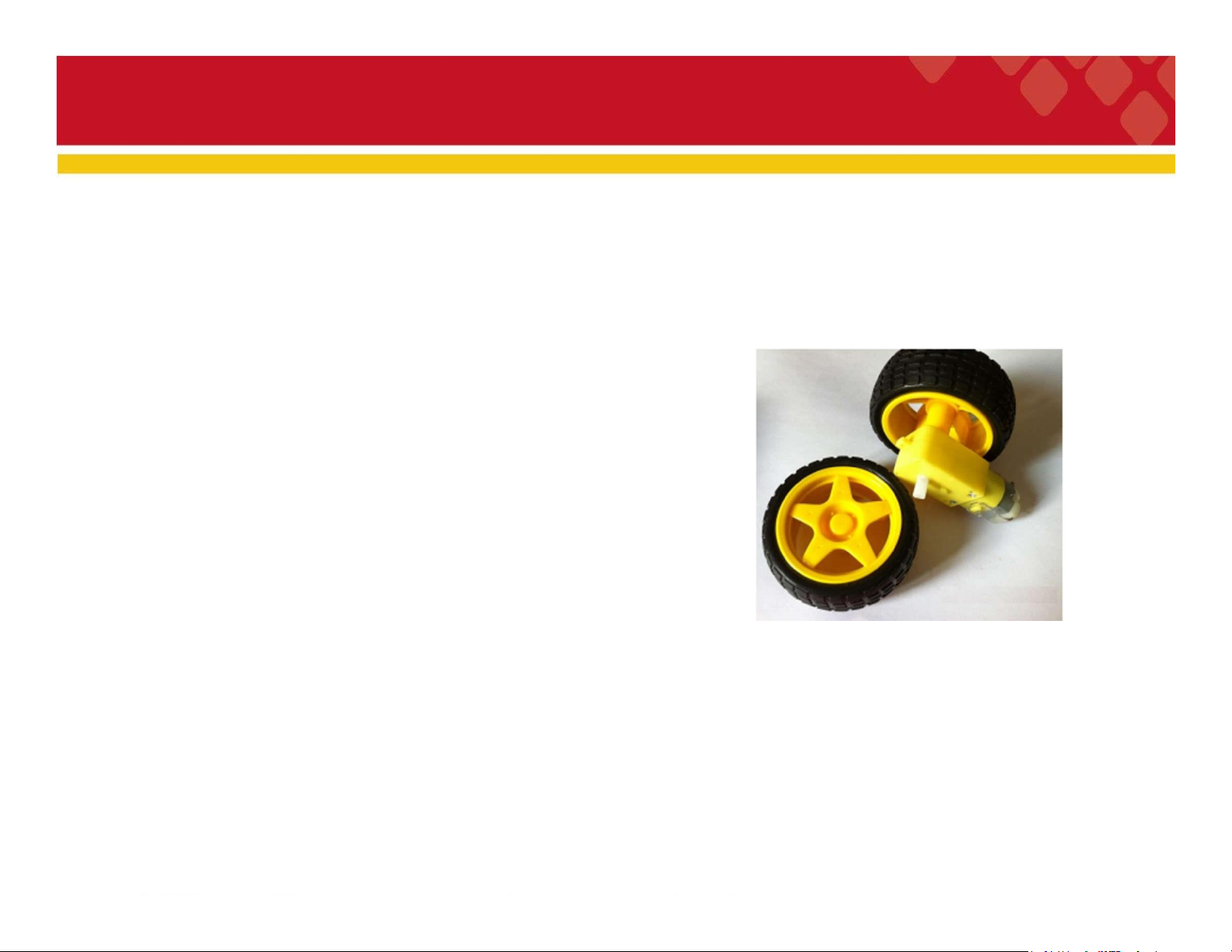
3.1 . ĐỘNG CƠ(MOTOR) + BÁNH XE
Nguyênlý, ứngdụng:
• Độngcơ DC giảmtốcGA12 thích
hợpvớicácứngdụngxe mô
hình, robot, ổ khóađiệntử, thiếtbịthông
minh. Xetựhànhđượcdẫnhướngnhờ2 bánhxe.
Thôngsốkỹthuật:
• Điệnáphoạtđộng: 1.5 ~ 12VDC • Tỉsốtruyền: 100:1 • Tốcđộqua hộpsố: • 3V ~ 75rpm • 6V ~ 150rpm • 12V ~ 300rpm
Thayđổihướng-Bởi2 bánhxe, 1 bánh quay và1 bánhđứng 3. Cơcấuchấphành
3.2 . ĐỘNG CƠSERVO • Ứngdụng:
Độngcơ RC Servo9G làđộngcơ phổbiến
dùngtrong cácmô hìnhđiềukhiểnnhỏvà
đơn giảnnhư cánhtay robot. Độngcơ có
tốcđộphảnứngnhanh, đượctíchhợpsẵn
Driverđiềukhiểnđộngcơ, dễdàngđiều
khiểngócquay bằngphương phápđiềuđộ rộngxung PWM.
• Thôngsốkỹthuật:
Kíchthước: 23mmx12.2mmx29mm Trọng lượng: 9 gram
Điện áp hoạt động: 4.2-6V Nhiệt độ: 0 ℃ --55 ℃
Tốc độ: 0.3 giây / 60 độ 4. Nguồn
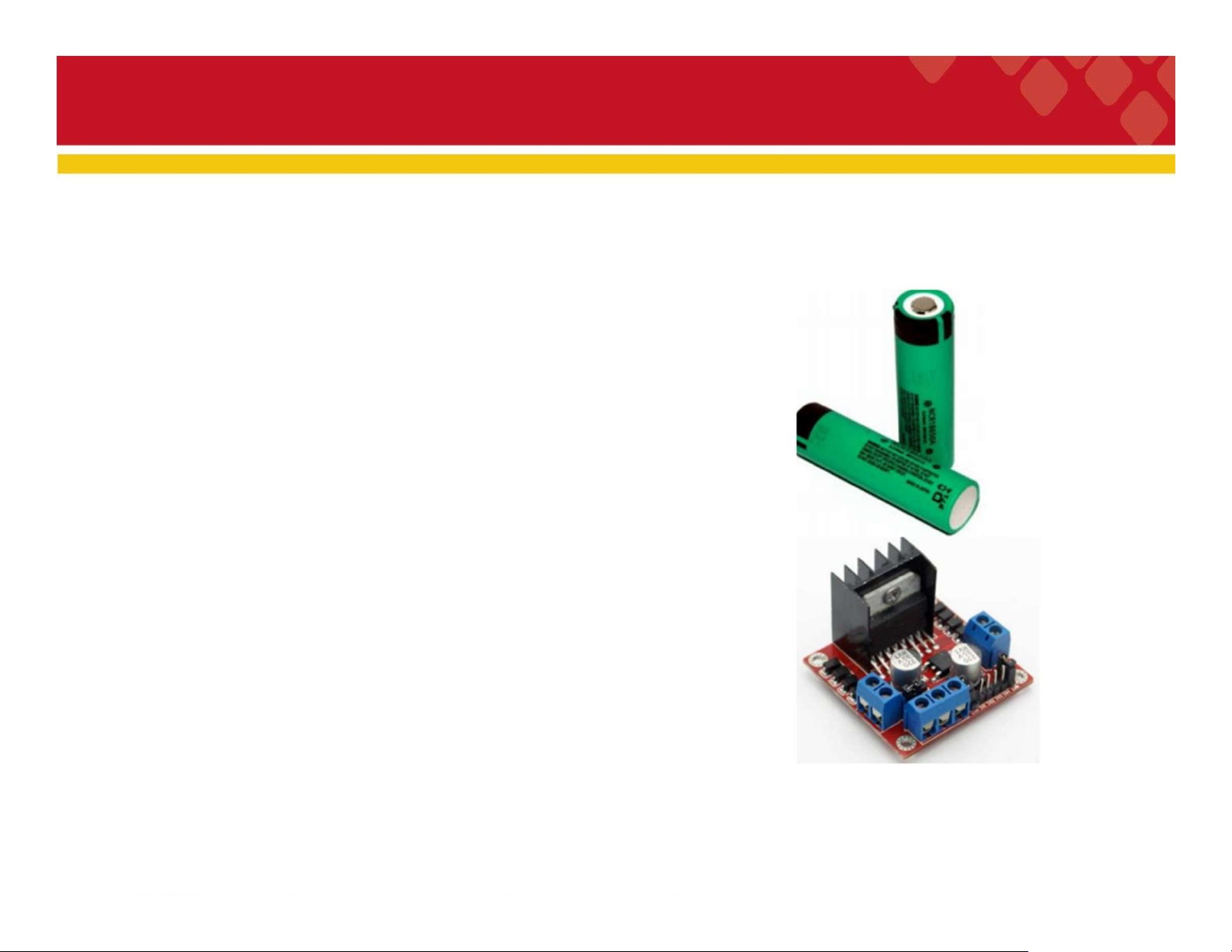
4 . MẠCH KHUẾCH ĐẠI DÒNG ĐIỆN VÀ PIN Nguyênlý:
• Khuếchđạidòngđiệncho cácứng
dụngcầndònglớn: điềukhiểnđộng cơ, chiếusáng,…
• Nguyên tắchoạtđộngcơ bản: dòng
tạingõvàoInnsẽđượckhuếchđại thànhdòngtạingõra Outn
• Driver: L298N tíchhợphai mạch cầuH Thôngsố:
• Điệnápcung cấp: 5 ~ 12VDC
• Dòngtốiđa cho mỗicầuH là: 2A
• Điệnápcủatínhiệuđiềukhiển: 5 ~ 7 VDC
• Dòngcủatínhiệuđiềukhiển: 0 ~ 36 mA Thôngsốpin: • Điệnáp: 3,7 VDC • Sốlượng: 02 viên
5. Cácthànhphầnkhác ▪ KhungMica lắpráp ▪ Bộốcvítgá độngcơ, mạch ▪ Bánhxe ▪ Hộppin ▪ Dâyđiện đực, cái ▪ Dâycápkết nốimáytính vàArduino
Bài2. HướngdẫncáchlắpđặtXetựhành
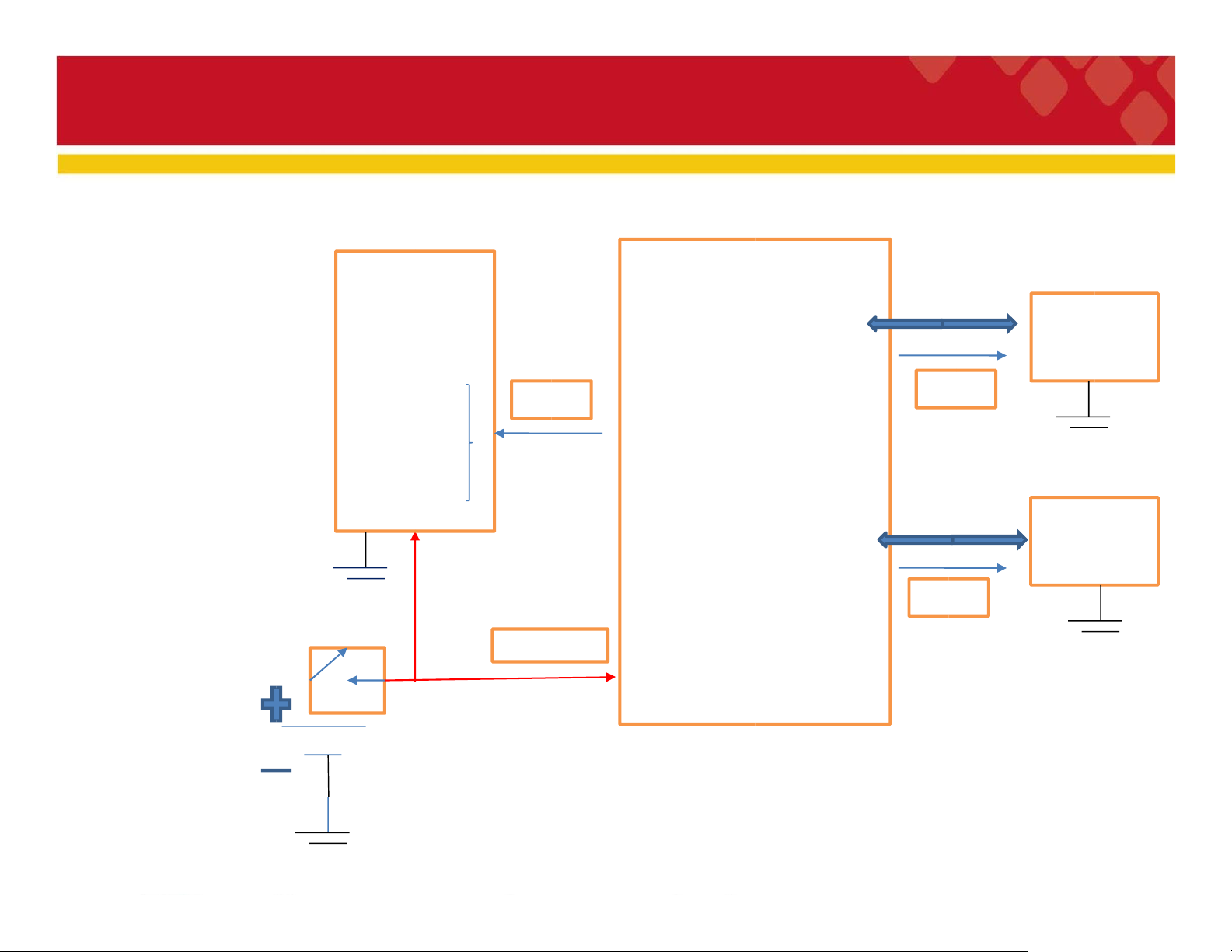
Sơđồđấunốimạch
Sơđồđấunốimạch Arduino Uno R3 L298 V 12 Châncấpnguồn Dòline GND Vin In1 5 5 v v GND In2 In3 Chândigital In4 0-13 Khoảng cách Chânanalog 5 v A0-A5 vin K
Dâycấpnguồn: dâyđỏ.
Dâynốiđất: dâyđen
DâytínhiệuAnalog: dâyxanh
DâytínhiệuDigital: dâycam, vàng .
Bài2. HướngdẫncáchlắpđặtXetựhành
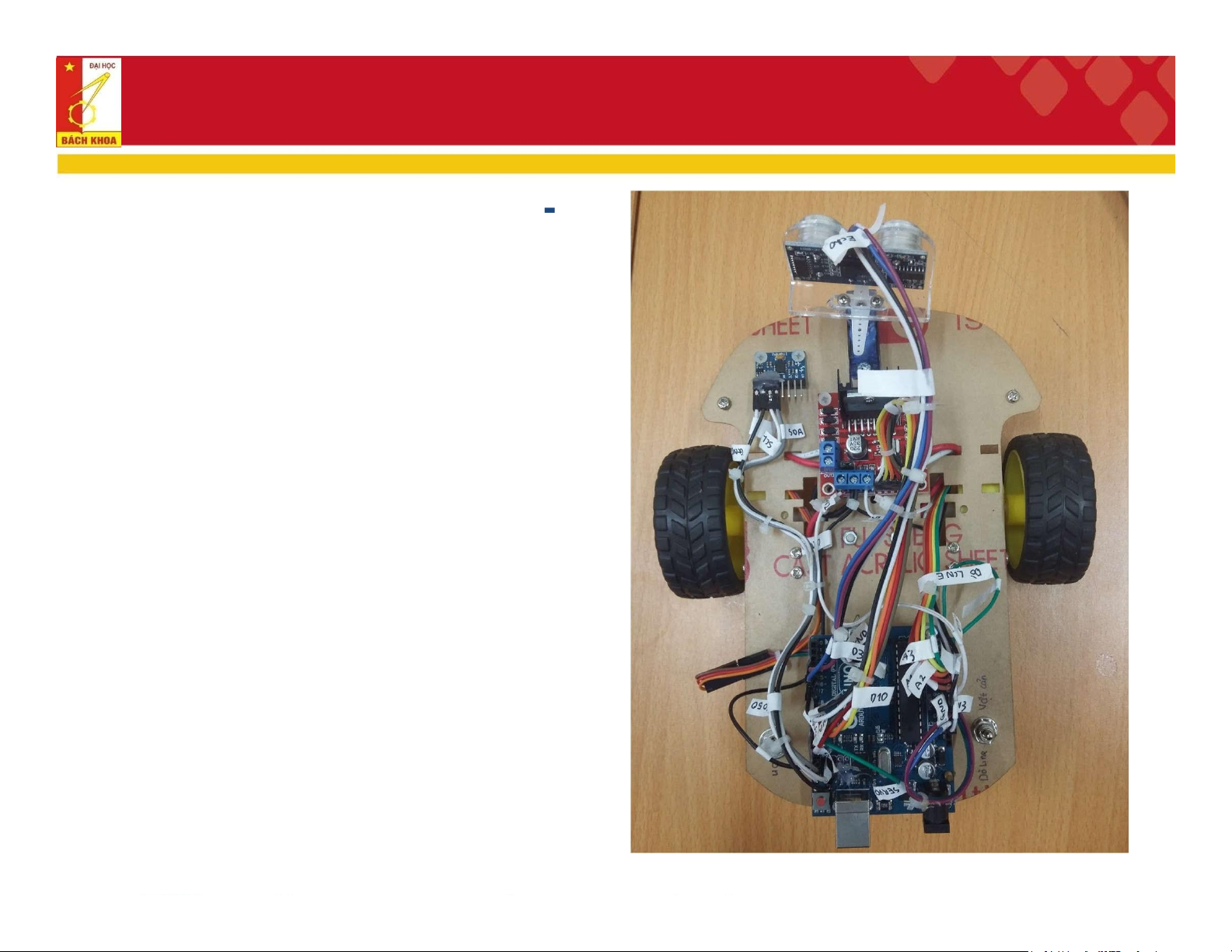
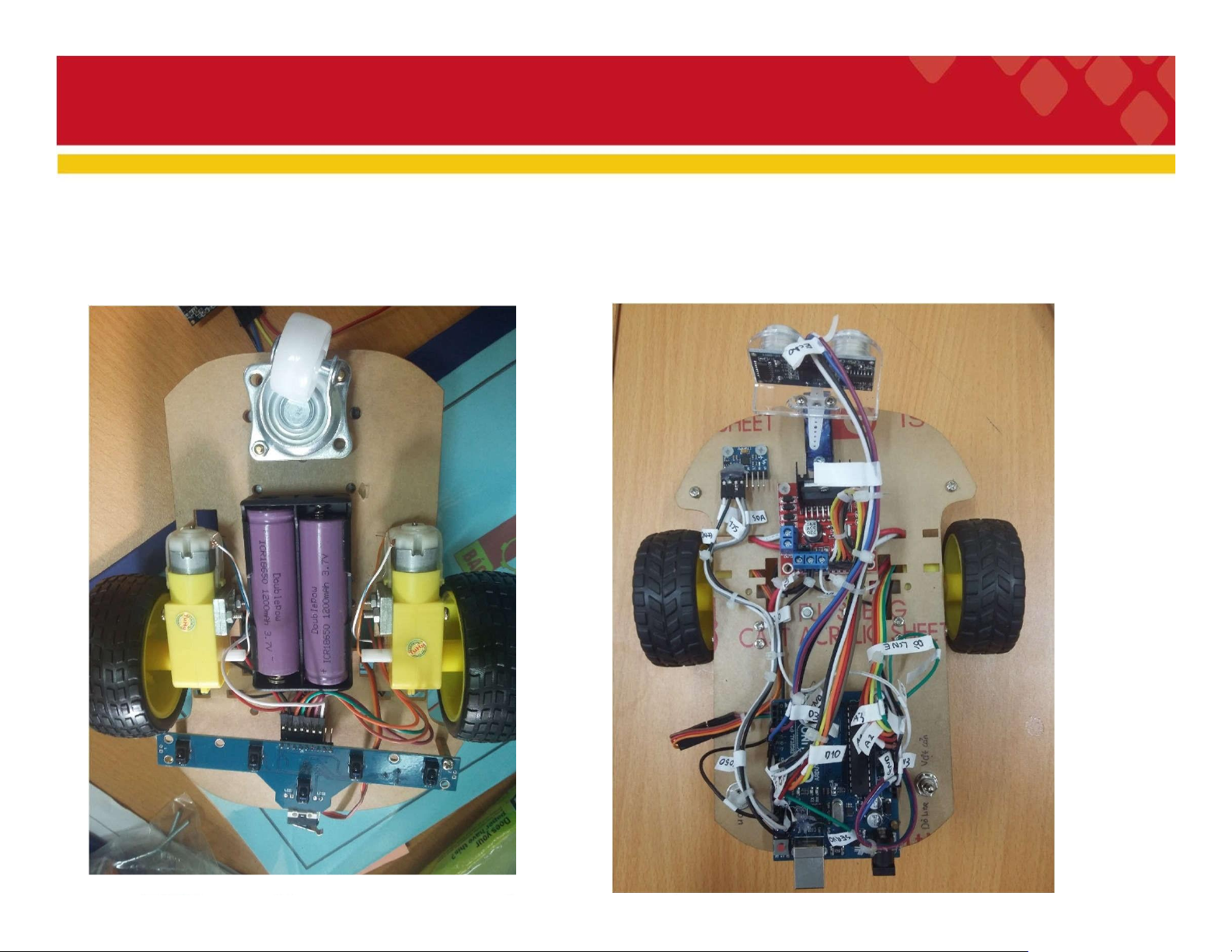
Hướngdẫncáchlắpđặtkhung, độngcơ, bánhxe Hìnhảnhthamkhảomặtsau
Hìnhảnhthamkhảomặttrước
Bài2. HướngdẫncáchlắpđặtXetựhành Quytrìnhlắpđặt
1. Lắpđặtphầncơkhí. 1.1. LắpĐộngcơ, bánh xedẫnhướng. 1.2. Lắpbánhxemắttrâu.
2. Lắpmạchkhuếchđại L298 N
3. Lắpđặtmạchđiều khiểnArduino
4. Lắpcảmbiếndòline vàđidây.
5. Lắpcảmbiếntránh vậtcảnvàđidây.
Tài liệu liên quan:
-

Câu hỏi ôn tập môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
203 102 -

Chương 5 - Hệ xử lý ảnh môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
156 78 -

Đạo hàm và tích phân | Bài giảng môn Phương pháp tính và matlab CTTT | Đại học Bách khoa hà nội
223 112 -

Số gần đúng và sai số | Bài giảng môn Phương pháp tính và matlab CTTT | Đại học Bách khoa hà nội
237 119