Câu hỏi ôn tập môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
Theo wikipedia, Cơ điện tử là ngành kỹ thuật đa lĩnh vực bao gồm cả kỹ thuật hệ thống, kỹ thuật cơ khí, kỹ thuật điện, kỹ thuật truyền thông, kỹ thuật điều khiển và kỹ thuật máy tính. Tài liệu được sưu tầm gồm 19 trang, giúp các bạn ôn luyện và phục vụ cho việc học tập, đạt kết quả tốt. Mời các bạn đón xem!
Môn: Nhập môn Cơ điện tử CTTT (Fundamental of Mechatronics) 12 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:
















Preview text:
CÂU HỎI ÔN TẬP
Môn học: Nhập môn Cơ điện tử
Câu1: Vai trò của ngành học Cơ điện tử trong lĩnh vực khoa học công nghệ và ứng dụng:
A, Định nghĩa Cơ điện tử
Theo wikipedia, Cơ điện tử là ngành kỹ thuật đa lĩnh vực bao gồm cả kỹ thuật hệ thống, kỹ thuật cơ
khí, kỹ thuật điện, kỹ thuật truyền thông, kỹ thuật điều khiển và kỹ thuật máy tính.
Vai trò cốt lõi của Cơ điện tử chính là điều khiển bằng máy tính.
B, Vai trò của Cơ điện tử
• Vai trò của ngành cơ khí chính là thiết kế phần cơ cho máy móc thiết bị, đặc biệt các cơ cấu chính xác.
- Kỹ sư cơ điện tử phải được trang bị các kiến thức cơ bản về vẽ kỹ thuật, cơ học, sức
bền vật liệu, nguyên lý máy, chi tiết máy, cơ khí chính xác, khoa học vật liệu, v.v...
- Cơ khí đóng vai trò nền móng của cơ cấu chấp hành, của các hệ cơ điện
Vai trò của ngành điện – điện tử là trang bị các kiến thức cơ bản về điện, động cơ, cơ cấu chấp
hành điện từ, thiết bị điều khiển, thiết bị xử lý tín hiệu, cảm biến, v.v... .
- Nhiệm vụ của kỹ sư cơ điện tử không phải là thiết kế các mạchđiều khiển, mà là tích
hợp các thiết bị điện, điện tử với hệ thống cơ khí tạo nên một hệ thống tổng thể chuẩn
bị cho các đáp ứng theo yêu cầu đặt ra đối với hệ thống.
- Điện – điện tử cùng với cơ khí tạo ra phần cứng của hệ thống.Vai trò của tự động hóa,
điều khiển tự động là tìm ra quy luật toán học để có thể điều khiển nhanh và chính xác
các hệ thống cơ điện. - Đây chính là cốt lõi của cơ điện tử, hay có thể nói là bộ não của
hệ thống mà cụ thể là tư duy hoạt động của hệ thống.
• Vai trò của ngành công nghệ thông tin là thiết lập phần mềm điều khiển và
phần mềm quản lý hệ thống, quản lý dữ liệu.
- Công nghệ thông tin giúp thể hiện các quy luật điều khiển bằng phần mềm và áp
dụng nó lên thiết bị cơ điện tử.
• Cơ điện tử không chỉ là tự động hóa các hệ thống kỹ thuật, mà làđỉnh cao của tự động hóa các hệ
thống kỹ thuật bởi sự hiện diện của điều khiển bằng máy tính.
• Kỹ sư cơ điện tử có nhiệm vụ thiết kế phần cơ khí, tích hợp nó vớicác thiết bị điện – điện tử, tạo ra
phần cứng của hệ thống, tìm quy luật điều khiển, thiết kế phần mềm điều khiển và quản lý dữ liệu. C, Ứng dụng:
• Cơ điện tử đã có mặt từ rất lâu và đóng vai trò quan trọng trong tất cả các lĩnh vực từ trước khi khái
niệm Cơ điện tử ra đời .
• Khoa học vũ trụ: Nghiên cứu chế tạo các con tàu thám hiểm vũ trụ, các vệ tinh, các rô bốt thám
hiểm, các thiết bị bay thậm chí các hệ thống phòng thủ trong vũ trụ.
• Quân sự: Chế tạo các loại vũ khí, khí tài hiện đại, các máy bay, tên lửa và các hệ thống phòng không,
các hệ thống tấn công các loại vũ khí hiện đại dùng cho bộ binh, pháo binh, tàu chiến, …
• An ninh: Các hệ thống bảo mật, các hệ thống giám sát, các hệ thống đảm bảo an ninh mạng, các hệ
thống bảo vệ các khu vực trọng yếu, v.v…
• Giao thông vận tải: Các hệ thống lái tự động, các loại thiết bị không người lái, các hệ thống giám sát,
điều hành tự động, các thiết bị tự động dùng cho máy bay, tàu chiến, tàu thủy, tàu hỏa, ô tô, xe tự hành, v.v…
• Công nghiệp: Các máy công cụ điều khiển số CNC, các rô bốt công nghiệp, AGV, các băng tải và các
thiết bị tự động khác, …
• Y sinh: Rô bốt phẫu thuật, các thiết bị y sinh kỹ thuật cao, thiết bị phân tích hóa nghiệm tự động và chính xác cao, ...
• Sản phẩm cơ điện tử rất đa dạng, tuy nhiên hai sản phẩm quantrọng nhất đó là rô bốt công nghiệp
và máy công cụ điều khiển số CNC.
• Các sản phẩm có yêu cầu kỹ thuật cao về cơ khí chính xác, thiết bị
điều khiển, cảm biến và phần mềm điều khiển nhằm đáp ứng hai vấn đề
cơ bản của tự động hóa: nhanh và chính xác.
=> Vấn đề cốt lõi của cơ điện tử chính là điều khiển tốc độ và điều khiển vị trí.
=> Vị thế của kỹ sư cơ điện tử ngày càng được khẳng định trong tất cả các
lĩnh vực từ nghiên cứu khoa học đến sản xuất và các lĩnh vực dịch vụ.
=>Các sản phẩm cơ điện tử ngày càng có công nghệ tiên tiến đem lại nhiều
tiện ích, tăng sức cạnh tranh cho sản xuất công nghiệp và cho các lĩnh vực khác
Câu 2: Các thành phần mô đun cơ bản trong một hệ thống Cơ điện tử.
Hệ thống cơ điện tử có 8 mô dun cơ bản sau:
(1) Mô đun môi trường (Environment module)
• Mô đun môi trường liên quan đến các thông số bên ngoài như nhiệt
độ, các yếu tố tải trọng, vv… sẽ tác động đến hoạt động của sản phẩm
đồng bộ. Trong thiết kế tổng thể, các tham số này thiết lập loạt điều
kiện biên, mà sản phẩm phải tồn tại và hoạt động trong đó.
(2) Mô đun tập hợp (Assembly module)
• Mô đun tập hợp thể hiện sự thực hiện vật lí của các thành phần cấu
trúc và thành phần cơ của hệ thống. Mô đun này liên quan trước hết
các tham số như tính chất vật liệu, cách hoạt động cấu trúc và tình
huống thực hiện. Đầu vào mô đun tập hợp bao gồm các chuyển động do
mô đun kích/truyền động (actuation module) cung cấp các điều kiện xác
định bởi mô đun môi trường. Đầu ra là thông số kỹ thuật của sản phẩm.
(3) Mô đun đo kiểm (Measurement module)
• Mô đun đo kiểm liên quan đến các phương pháp sử dụng sensor để
thu thập và cảm nhận thông tin trạng thái. Thông tin đầu vào thường là
các tín hiệu vật lý còn đầu ra được chuyển đổi sang dạng thông tin phù
hợp với bộ xử lí tín hiệu. Từ đó, truyền tới bộ chấp hành để thực hiện
các hoạt động theo yêu cầu.
(4) Mô đun chấp hành (Actuator module)
• Mô đun chấp hành thể hiện các yêu cầu trong hệ thống. Các điều kiện
đầu vào mô đun được thiết lập bởi đầu ra mô đun xử lí còn các đầu ra
được xác định bởi kiểu chuyển động được yêu cầu.
(5) Mô đun truyền thông (Communication module)
• Mô đun truyền thông thực hiện truyền thông tin giữa các mô đun trong
phạm vi hệ thống. Các trạng thái của đầu vào và đầu ra phụ thuộc vào bản
chất thông tin được truyền, khoảng cách truyền và môi trường.
(6) Mô đun xử lý (Processor module)
• Mô đun xử lí có nhiệm vụ xử lí thông tin do mô đun giao diện và mô đun đo kiểm cung cấp. Các
tham số đầu vào gồm các thông số đo
được, các thiết lập yêu cầu và các thông số như tốc độ vận hành,… Đầu ra từ mô đun xử lí quyết định
sự hoạt động của mô đun truyền động và cung cấp thông tin tới mô đun giao diện.
(7) Mô đun phần mềm (Software module)
• Mô đun phần mềm gồm các chỉ thị hoạt động và thuật toán xác định dành cho
hệ thống và điều khiển hoạt động của mô đun xử lí.
(8) Mô đun giao diện (Interface module)
• Mô đun giao diện liên quan với việc di chuyển thông tin giữa các mức
trong hệ thống và ở tại mức cao nhất, cung cấp giao diện người-máy cần
thiết cho truyền thông tin của người sử dụng
Câu 3: Trình bày vai trò của các hệ thống chấp hành trong một hệ cơ điện tử A, các khái niệm:
Cơ cấu chấp hành là phần “cơ bắp” trong hệ thống
cơ điện tử. Nó đóng vai trò như một “động cơ” có
nhiệm vụ kích hoạt/ dẫn động (actuator) cho máy/ hệ
thống. Cơ cấu này nhận lệnh điều khiển (chủ yếu
là tín hiệu điện) và tạo ra sự thay đổi (theo yêu cầu)
trong hệ vật lý bằng cách tạo ra các lực, chuyển động,…
Cơ cấu chấp hành thường được sử dụng kết hợp một
nguồn cung cấp năng lượng phụ trợ (điện, cơ, khí nén,
thủy lực,…) với cơ cấu chuyển đổi năng lượng, cơ cấu
biến đổi chuyển động.
Cơ cấu chấp hành thường được bố trí giữa thiết bị điều khiển và hệ cơ.
B, Vai trò của từng phần tử của cơ cấu chấp hành: -Phần tử cơ khí:
+ Cơ cấu khâu, khớp dùng để truyền chuyển động hoặc biến đổi chuyển động tròn
thành chuyển động quay và ngược lại.
+ Cơ cấu bánh răng dùng để biến đổi mô men, tốc độ khi truyền chuyển động
+ Cơ cấu cam được sử dụng nhiều trong chế tạo máy, cùng với cánh tay đòn và
trục khuỷu tạo nên các chuỗi động học trong các máy công cụ chép hình cổ điển
và hiện vẫn còn sử dụng phổ biến cho các van của động cơ.
Ngoài ra còn một cơ cấu khác như cơ cấu động cơ chữ V, cơ cấu máy dệt, truyền động đai xích… -Phần tử điện:
+ Điốt (DIOde) dùng để chỉnh lưu dòng điện
+ Transistor dùng trong các mạch khuếch đại cường độ dòng điện, điều khiển luồng điện qua các mạch điện
+Thyristo sử dụng trong các biến tần một chiều-điều kiện xoay để chuyển đổi nguồn
điện xoay chiều thành nguồn điện xoay chiều có tần số và điện áp được điều chỉnh.
+Solenoid dùng dòng điện để tạo ra từ trường nhằm điều khiển van Đóng hoặc Mở, ứng
dụng trong máy đề ô tô,xe máy.
+Động cơ điện một chiều (DC motor) biến đổi điện năng thành cơ năng là chuyển
động quay tròn. Có thể điều chỉnh tốc độ quay bằng nhiều cách nhưng phổ biến nhất là
cách thay đổi điện áp.
+Động cơ bước dùng để biến đổi các tín hiệu điều khiển dưới dạng xung thành các
chuyển động góc quay theo yêu cầu.
+Động cơ xoay chiều 3 pha, động cơ AC biến đổi điện năng thành cơ năng. Sử dụng
dòng điện xoay chiều với nguyên lý từ trường quay.
+Động cơ servo (DC, AC) có thêm cảm biến và vi điều khiển để điều khiến chính xác tốc độ quay.
-Phần tử thuỷ lực, khí nén: dùng để truyền chuyển động thẳng và chuyển động quay. + Truyền động khí nén:
Thường sử dụng dưới dạng các hệ truyền động kẹp giữ, vận chuyển,
nâng hạ, phanh hãm, các cơ cấu tự động hóa, thiết bị đo… Ứng dụng rộng rãi trong cơ điện tử.
+ Truyền động thuỷ lực: ứng dụng trong những máy công suất lớn, có thể truyền
chuyển động với độ chính xác cao.
Câu 4: Trình bày về các sản phẩm cơ điện tử điển hình. Phân tích các hệ thống chấp hành được tích
hợp trong sản phẩm cơ điện tử điển hình đó.
Sản phẩm cơ điện tử rất đa dạng, tuy nhiên hai sản phẩm quan trọng nhất đó là rô bốt công nghiệp và
máy công cụ điều khiển số CNC.
Hai sản phẩm này có rất nhiều cơ cấu chấp hành giống nhau. Một số cơ cấu chấp hành được tích hợp
trong 2 loại sản phẩm đó là:
A, cơ cấu chấp hành điện:
Động cơ servo: Động cơ servo là một thành phần trong hệ thống servo. Động cơ servo nhận tín hiệu
từ bộ điều khiển và cung cấp lực chuyển động cần thiết cho các thiết bị máy móc khi vận hành với
tốc độ và độ chính xác cực kỳ cao.
( Động cơ servo được chia thành 2 loại: động cơ servo AC, động cơ servo DC. Có thể điều khiển tốc độ
quay của động cơ servo loại DC bằng cách thay đổi điện áp, còn loại AC bằng cách thay đổi tần số nguồn điện cấp vào. )
Cấu tạo của động cơ AC servo bao gồm 3 phần: stator, rotor (thường là loại nam châm vĩnh cửu) và encoder.
Động cơ điện một chiều (DC motor): stator là nam châm vĩnh cửu, rotor là cuộn dây quấn quanh lõi
thép. Có chổi góp để thay đổi chiều dòng điện cấp vào cuộn dây rotor. Nguyên lý hoạt động tóm tắt là
sự hút/ đẩy của các cực từ trường giữa nam châm vĩnh cửu và cuộn dây.
Động cơ điện xoay chiều (AC motor) loại phổ biến thì stator là cuộn dây, rotor là lồng sóc. Nguyên lý
hoạt động dựa trên từ trường quay của cuộn dây, làm xuất hiện cảm ứng điện từ trong lồng sóc, dẫn
đến sự quay do lực sinh ra từ từ trường của cuộn dây và lồng sóc.
Động cơ bước: dùng để biến đổi các tín hiệu điều khiển dưới dạng xung thành các chuyển
động góc quay theo yêu cầu.
B, cơ cấu thuỷ lực, khí nén:
- Thường là mô tơ quay, xi lanh chuyển động tịnh tiến hoặc là van điều khiển.
- Cơ cấu chấp hành khí nén sử dụng áp suất khí, nó phù hợp với các cơ cấu chịu lực nhỏ và trung bình,
hành trình nhỏ và vận tốc cao
- Cơ cấu chấp hành thủy lực sử dụng áp suất dầu. Chúng tạo ra lực rất lớn kết hợp với chuyển động
lớn. Nhược điểm của cơ cấu này là phức tạp và cần thường xuyên báo dưỡng.
C, cơ cấu chấp hành cơ khí:
Dùng để truyền chuyển động quay, chuyển động tịnh tiến, thay đổi tốc độ, momen hoặc biến đổi
chuyển động quay thành chuyển động tịnh tiến và ngược lại.
Gồm nhiều cơ cấu như trục, khuỷu, cơ cấu bánh răng, cơ cấu trục vít, truyền động băng chuyền,…
Câu 5: Phân tích các ưu nhược điểm và ứng dụng của các hệ thống Cơ khí, thủy lực-khí nén:
A, Truyền động khí nén: *Ứng dụng:
-Phạm vi ứng dụng rộng rãi, đặc biệt trong lĩnh vực Cơ điện tử
-Thường sử dụng dưới dạng các hệ truyền động kẹp giữ, vận chuyển, nâng hạ, phanh hãm, các
cơ cấu tự động hóa, thiết bị đo… *Ưu điểm:
-Kết cấu đơn giản trong sử dụng và điều khiển
-Độ tin cậy làm việc cao.
-Độ an toàn cao với các môi trường dễ cháy, nổ, các môi trường khắc nghiệt: phóng xạ, hóa chất *Nhược điểm
-Khả năng tác động nhanh và điều khiển từ xa kém hơn hệ thống điện- điện tử, nhưng vẫn tốt hơn hệ
thống thủy lực (có thể dùng kết hợp các HT)
-Kích thước lớn hơn hệ thống thủy lực cùng công suất
-Tính nén được của không khí khá lớn nên ảnh hưởng chất lượng của HT
-Vận tốc của cơ cấu chấp hành lớn nên dễ xảy ra va đập ở cuối hành trình.
-Điều khiển theo quy luật vận tốc cho trước và dừng ở giữa hành trình là khó hơn so vơi HT thủy lực .
-Làm việc ồn hơn HT thủy lực B, Thuỷ lực: *Ứng dụng:
-Tích hợp vào các hệ thống máy móc công suất lớn như máy múc, cần cẩu, cánh tay robot công nghiệp lớn,…
-Ứng dụng vào các loại cánh tay robot lắp ráp, sơn, cần điều khiển chính xác vị trí… *Ưu điểm:
-Công suất truyền động lớn, truyền động êm, phòng được quá tải
-Độ nhạy và độ chính xác cao.
-Truyền động vô cấp và cho phép đảo chiều chuyển động
-Hiệu suất TĐ cao (ngang TĐ điện nhưng kém TĐ Cơ khí), đặc biệt có ưu việt về hiệu suât khi khoảng cách truyền lớn *Nhược điểm:
-Tính chính xác phụ thuộc vào chất lượng của dầu thủy lực, khí hậu, môi trường,...
-Khó khăn trong bảo trì, vấn đề chống ăn mòn, chống xuống cấp của dầu.
-Gây ô nhiễm môi trường. C, Phần tử cơ khí: *Ứng dụng: -
Dùng để truyền chuyển động quay, chuyển động tịnh tiến, thay đổi tốc độ, momen hoặc biến
đổi chuyển động quay thành chuyển động tịnh tiến và ngược lại.
-Ứng dụng rộng rãi trong nhiều lĩnh vực, trong đó có cơ điện tử.
-Tích hợp vào một số máy công cụ CNC, cánh tay robot, hộp số xe máy,… *Ưu điểm: ? bịa đi chứ chịu r
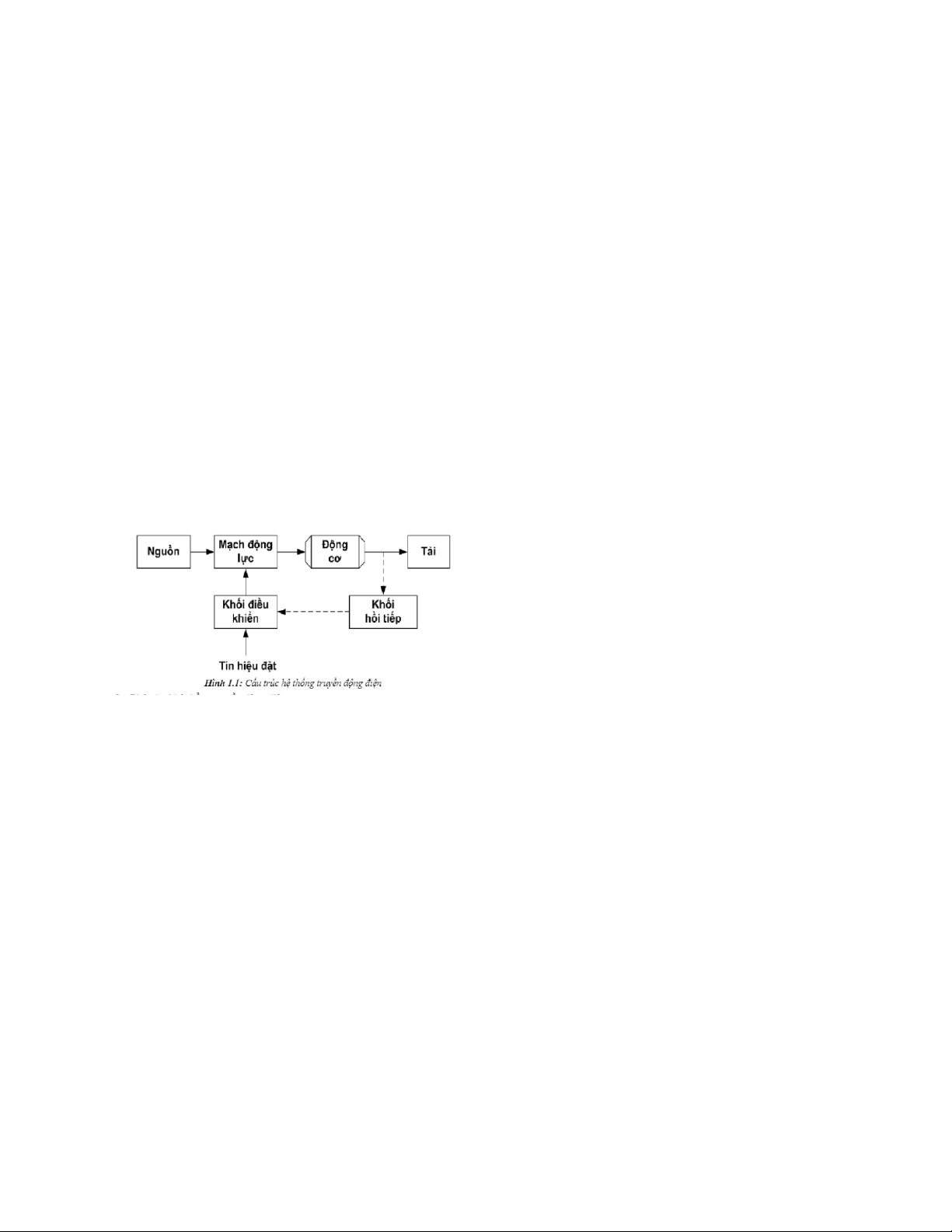
Câu 6: Phân tích các khối cơ bản trong một hệ thống truyền động điện:
Hệ truyền động điện là một tập hợp các thiết bị như: thiết bị điện, thiết bị điện từ, thiết bị điện tử,
phục vụ cho việc biến đổi điện năngthành cơ năng cung cấp cho cơ cấu chấp hành trên các máy sản
xuất và đồng thời điều khiển quá trình biến đổi năng lượng đó.
Cấu trúc chung của hệ thống truyền động điện bao gồm 2 phần chính: -
Phần động lực là bộ biến đổi và động cơ truyền động. Các bộ biến đổi thường dùng là bộ biến
đổi máy điện (máy phát một chiều, xoay chiều), bộ biến đổi điện từ (khuếch đại từ,cuộn kháng bão
hòa), bộ biến đổi điện tử (chỉnh lưu Thyristor, biến tần, Chopper…). Động cơ điện có các loại: động cơ
điện một chiều, xoay chiều đồng bộ, không đồng bộ và các loại động cơ điện đặc biệt khác v.v… -
Phần điều khiển gồm các cơ cấu đo lường, các bộ điều chỉnh thông số và công nghệ, ngoài ra
còn có các thiết bị điều khiển đóng cắt phục vụ công nghệvà cho người vận hành. Ngoài ra còn có một
số hệ truyền động có cả mạch ghép nối với các thiết bị tự động khác trong một dây chuyền sản xuất.
Câu 7: Trình bày các đặc tính cơ bản, nguyên lý hoạt động của động cơ điện: động cơ điện một
chiều, động cơ điện xoay chiều ba pha không đồng bộ, động cơ điện xoay chiều một pha, động cơ
điện đồng bộ, động cơ bước, động cơ servo.
a, Động cơ điện một chiều: *Đặc tính:
-Stato của động cơ điện 1 chiều thường là một hay vài cặp nam châm vĩnh cửu, nam châm điện hoặc
cũng có thể là cuộn dây điện từ, để tạo ra từ trường.
-Phần rotor gồm có các cuộn dây quấn và được kết nối trực tiếp với nguồn điện một chiều. -Bộ chỉnh
lưu: thường sẽ có 2 thành phần: một bộ cổ góp và một bộ chổi than tiếp xúc với cổ góp. *Nguyên lý:
-Rotor khi được cấp điện sẽ tạo ra từ tường tương tác với từ trường của nam châm vĩnh cửu (stato),
đồng thời tạo ra momen quay. Lúc này, hướng chuyển động của rotor sẽ được xác định bằng quy tắc bàn tay trái.
-Khi dòng điện chạy trong rotor, phần ứng đặt trên rotor và cổ góp đứng yên sẽ chuyển dòng điện từ
cuộn dây này sang cuộn dây kia. Động cơ DC sẽ hoạt động với tốc độ cố định khi dòng điện cố định,
đồng thời không có hiện tượng trượt.
*Động cơ xoay chiều ba pha không đồng bộ:
-Phần tĩnh (STATOR): Gồm khung, sắt từ và dây quấn; -Phần quay
(ROTOR): Gồm Rotor, trục và bạc đạn.
-Khi dòng điện 3 pha vào các dây quấn Stator thì xuất hiện từ trường quay với từ thông biến thiên qua
các khung dây kín của Rotor làm xuất hiện sức điện động và dòng điện cảm ứng. -Lực tương tác điện
từ tạo ra momen quay làm Rotor quay với tốc độ n nhỏ hơn tốc độ n1 của từ trường. Tốc độ của từ
trường quay được xác định bởi tần số cung cấp của lưới điện và số các cực được tạo ra từ các cuộn dây.
c, động cơ xoay chiều 1 pha:
– Stator: bao gồm vỏ máy, lõi sắt và dây quấn.
– Rotor: bao gồm lõi thép, trục và lồng sóc (hoặc dây quấn)
-Khi cuộn dây trên Stator được nối với nguồn điện xoay chiều 1 pha, dòng điện đi qua dây quấn sẽ tạp ra từ trường quay.
-Trong quá trình quay từ trường này sẽ quét qua các thanh dẫn của Rotor, làm xuất hiện sức điện
động cảm ứng. Vì dây quấn Rotor là kín mạch nên sức điện động này tạo dòng điện trong các thanh
dẫn (hoặc dây quấn) của Rotor. Các thanh dẫn có dòng điện lại nằm trong từ trường, nên sẽ tương tác
với nhau, tạo ra lực điện từ đặc vào các thanh dẫn.
-Tổng hợp các lực này sẽ tạo ra moment quay đối với trục Rotor, làm cho Rotor quay theo chiều
của từ trường. D, động cơ đồng bộ:
Là động cơ xoay chiều đặc biệt, tốc độ quay của động cơ bằng tốc độ quay của từ trường *Cấu tạo
-stato gồm 2 phần: lõi thép và dây quấn.
-Roto của Synchronous motor bao gồm lõi thép cực từ và dây quấn kích từ. Trong đó, dây quấn kích từ
được nối với nguồn điện một chiều nhằm tạo ra từ trường cố định trên các cực từ.
-ngoài ra còn có bộ kích từ để biến rotor thành nam châm điện. *Nguyên lý:
-Hoạt động của động cơ đồng bộ là do sự tương tác giữa từ trường của stato và roto. Cuộn dây stato
được cung cấp nguồn điện 3 pha và rôto được cung cấp nguồn điện một chiều. Khi đó, stato sẽ tạo ra
từ thông quay 3 pha (và do đó là từ trường quay) còn roto khóa với từ trường quay và quay cùng với
nó. Khi trường roto khóa với từ trường quay, động cơ được sẽ được đồng bộ hóa. E, Động cơ bước
-Thực chất, đây là một loại động cơ đồng bộ, có khả năng biến đổi các tín hiệu điều khiển của máy
móc dưới dạng các xung điện rời rạc được phát ra kế tiếp nhau, tạo thành các chuyển động góc quay.
(Cấu tạo giống động cơ đồng bộ)
-Động cơ motor bước làm việc nhờ vào hoạt động của các bộ chuyển mạch điện tử. Các mạch điện tử
này sẽ đưa các tín hiệu của lệnh điều khiển chạy vào stato theo số thứ tự lần lượt và một tần số nhất định.
-Tổng số góc quay của từng con rotor tương ứng với số lần mà động cơ được chuyển mạch. Đồng
thời, chiều quay và tốc độ quay của con rotor còn phụ thuộc vào số thứ tự chuyển đổi cũng như tần
số chuyển đổi của nó. F, Động cơ servo:
-Động cơ servo là một phần của hệ thống vòng kín, chúng bao gồm một số bộ phận cụ thể là mạch
điều khiển, động cơ servo, trục, chiết áp, bộ khuếch đại, bánh răng truyền động và bộ mã hóa hoặc bộ phân giải.
-Tốc độ của động cơ Servo DC dựa trên điện áp được sử dụng.
-Đối với động cơ servo AC thì điều khiển qua tần số điện xoay chiều.
***phụ lục về động cơ servo:
Động cơ servo là một thiết bị điện độc lập, quay các bộ phận của máy với hiệu suất cao và có độ chính xác cao.
Bộ điều khiển là bộ phận quan trọng nhất của Servo.
Động cơ được điều khiển bằng tín hiệu điện, tương tự hoặc kỹ thuật số, xác định lượng chuyển động
đại diện cho vị trí lệnh cuối cùng của trục.
=Phân loại động cơ Servo Động cơ Servo AC hay DC
Xét theo hiệu suất thì giữa động cơ AC và DC khác nhau lớn nhất là ở khả năng kiểm soát tốc độ.
Với động cơ điện một chiều thì tốc độ tỷ lệ thuận với điện áp cung cấp với tải không đổi. Đối với động
cơ xoay chiều, tốc độ được xác định bằng tần số của điện áp đặt vào và số cực từ.
Động cơ Servo AC chịu được dòng điện cao hơn so với DC. Ngoài ra động cơ AC được sử dụng phổ
biến hơn trong các ứng dụng Servo như: Trong dây chuyền sản xuất, trong các ứng dụng công nghiệp
khác đòi hỏi số lần lặp lại nhiều và độ chính xác cao.
==Động cơ Servo có chổi than và không chổi than
Servo DC sẽ được chuyển mạch cơ học với chổi than. Chúng sử dụng cổ góp hoặc điện tử không có chổi than.
Ưu điểm của động cơ có chổi than là ít tốn kém hơn và vận hành đơn giản hơn. Còn ưu điểm của
động cơ không chổi than là đáng tin cậy hơn. Ngoài ra hiệu suất cao hơn và vận hành ít ồn hơn.
Loại động cơ DC có chổi than thường được sử dụng phổ biến.
Động cơ DC không chổi than có thể thay thế chổi than vật lý và cổ góp bằng một linh kiện điện tử để
đạt được sự chuyển mạch. Và thường sẽ thông qua việc sử dụng cảm biến Hall hoặc encoder
==Nguyên lý hoạt động của Servo DC
Nguyên lý hoạt động của Servo DC dựa trên cấu tạo của bốn thành phần chính. Đó là động cơ DC,
thiết bị cảm biến vị trí, cụm bánh răng và mạch điều khiển.
Tốc độ của động cơ Servo DC dựa trên điện áp được sử dụng.
Để điều khiển tốc độ động cơ, thường sử dụng 1 chiết áp để tạo ra điện áp tương ứng. Trong một số
mạch thì xung điều khiển được sử dụng để tạo ra điện áp tham chiếu DC tương ứng với một vị trí
hoặc tốc độ mong muốn của động cơ. Và nó sẽ được áp dụng cho bộ chuyển đổi điện áp độ rộng xung.
Độ dài của xung quyết định đến điện áp đặt tại bộ khuếch đại. Điều đó để tạo ra một điện áp tương
đương với tốc độ hoặc vị trí mong muốn.
Đối với điều khiển kỹ thuật số, PLC hoặc là bộ điều khiển chuyển động khác được sử dụng để tạo xung
theo chu kỳ nhiệm vụ nhằm mục đích xây dựng nên những quy trình điều khiển chính xác hơn.
--Nguyên lý hoạt động của Servo AC
Nguyên lý hoạt động của động cơ Servo AC dựa trên cấu tạo của hai loại động cơ AC Servo khác nhau
là: đồng bộ và không đồng bộ.
Servo xoay chiều đồng bộ bao gồm 2 bộ phận là stato và rôto. Cấu tạo Stato gồm khung hình trụ và lõi stato.
Bộ phận cung cấp dòng điện cho động cơ là cuộn dây phần ứng quấn quanh lõi stato và cuộn dây
được nối với dây dẫn qua đó.
Khi trường stato được kích thích với điện áp thì rôto sẽ chạy theo từ trường quay của stato. Và sẽ với
cùng tốc độ hoặc đồng bộ với trường kích thích của stato.
Với rôto nam châm vĩnh cửu do không cần dòng điện rôto nên khi trường stato giảm dần và dừng thì
rôto cũng vì thế mà dừng lại.
Hầu hết các động cơ cảm ứng sẽ có chứa một phần tử quay, rôto hoặc lồng sóc.
Chỉ có cuộn dây stato là được cấp nguồn xoay chiều.
--Ứng dụng của động cơ servo là gì?
Hiện nay servo được áp dụng trong nhiều trong hệ thống và sản phẩm công nghiệp. Tính năng lấy
nét tự động của máy ảnh sử dụng motor servo được tích hợp trong máy ảnh dùng để điều chỉnh
độ chính xác vị trí của ống kính. Từ đó làm sắc nét những hình ảnh bị mất nét.
Với các hệ thống định vị ăng-ten trong đó thì động cơ servo còn được sử dụng cho cả định vị phương
vị và trục độ cao của ăng-ten, kính thiên văn. Ví dụ chúng được sử dụng bởi Đài quan sát thiên văn vô tuyến quốc gia.
Câu 8: Trình bày vai trò và đặc điểm của hệ thống thông tin giám sát trong một hệ cơ điện tử. A, Đặc điểm:
Hệ thống thông tin giám sát dùng để cảm nhận, biến đổi các đại lượng vật lý cần đo (nhiệt độ, chuyển
vị, lực, v.v... có thể là các đại lượng không có tính chất điện) thành các đại lượng điện tỷ lệ (điện, từ
trường, v.v...) để xử lý và sử dụng làm tín hiệu điều khiển.
Các thông tin của các đại lượng này được truyền về hệ thống đo lường điều khiển, giúp nhận dạng,
đánh giá, điều khiển mọi biến trạng thái của đối tượng. B, vai trò:
-Có vai trò rất quan trọng, đóng ghóp nhiều chức năng trong các sản phẩm thuộc lĩnh vực cơ điện tử.
-Hệ thống này còn có vai trò như các giác quan trong cơ thể sống.
Câu 9: Đặc điểm và vai trò của cảm biến trong một hệ cơ điện tử. A, Đặc điểm:
-Cảm biến là thiết bị dùng để cảm nhận, biến đổi các đại lượng vật lý cần đo (nhiệt độ, chuyển vị, lực,
v.v... có thể là các đại lượng không có tính chất điện) thành các đại lượng điện tỷ lệ (điện, từ trường, v.v...)
để xử lý và sử dụng làm tín hiệu điều khiển.
-Các dạng năng lượng cần đo: Cơ, nhiệt, điện từ, quang, hóa học, v.v... -Hệ thống cảm biến
Cảm biến điện tử có:
+Bộ biến đổi sơ cấp: biến đổi các đại lượng vật lý thành tín hiệu điện.
+Bộ biến đổi thứ cấp: chuyển các tín hiệu điện thành tín hiệu số hoặc tín hiệu tương tự. B, vai trò:
Với các bài toán điều khiển hệ thống tự động hóa nói chung và điều khiển quá trình nói riêng thì cảm
biến có vai trò vô cùng quan trọng.
-Cảm biến giúp "cảm nhận" các tín hiệu điều khiển vào ra.
-Cảm biến giới hạn cảm nhận với đại lượng vật lí cần đo.
-Đem lại giá trị cao trong quá trình đo đạc.
-Cảm biến chính là một trong những thiết bị có khả năng cảm nhận được những tín hiệu điều khiển một cách nhanh nhất.
-Cảm biến nắm vai trò quan trọng với các bài toán điều khiển trong quá trình và trong các hệ thống điều khiển.
- Với sự phát triển của Internet of Things (IoT), cảm biến trở thành một phần quan trọng của các hệ
thống thông minh và hệ thống tự động hoá, giúp nâng cao hiệu quả và độ chính xác của các quá trình hoạt động.
Câu 10: Trình bày các đặc trưng của cảm biến. Liệt kê các loại cảm biến hiện có được ứng
dụng trong lĩnh vực khoa học kỹ thuật và công nghệ * Đặc trưng:
- Độ nhạy là tỷ số giữa sự thay đổi của đầu ra và đầu vào của cảm biến.
- Miền đo là giới hạn bởi miền giá trị cực đại và giá trị cực tiểu của đại lượng cần đo mà
cảm biến có thể phân biệt được.
- Độ phân giải là sự thay đổi lớn nhất của các giá trị đo mà không làm thay đổi giá trị đầu ra của cảm biến.
- Độ chính xác được đánh giá bằng sự sai khác lớn nhất của giá trị đo được và giá trị thực
của đại lượng cần đo.
- Độ chính xác lặp là mức độ mà cảm biến cho ra cùng giá trị đo với cùng điều kiện đo.
- Độ tuyến tính: Một cảm biến được gọi là tuyến tính trong một dải đo xác định nếu trong dải chế độ
đó, độ nhạy không phụ thuộc vào đại lượng đo.
- Thời gian đáp ứng (Response time) thời gian từ lúc đối tượng thay đổi tính chất đến lúc
cảm biến phát hiện ra sự thay đổi đó.
* Các loại cảm biến được ứng dụng rộng rãi trong khoa học công nghệ là: -Công tắc hành trình -Cảm biến con chạy
- Biến áp vi sai biến đổi
- Encoder gia tăng, Encoder tuyệt đối, Encoder tuyến tính
-Cảm biến cảm ứng điện từ, Cảm biến điện cảm, Cảm biến điện dung,
-Cảm biến siêu âm, Cảm biến quang
- Cảm biến đo vận tốc, Cảm biến gia tốc - Gyroscope
- Cảm biến nhiệt độ, Cảm biến đo lưu lượng, Cảm biến lực, biến dạng -Cảm biến xúc giác
Một số ứng dụng có thể kể đến của các cảm biến như cảm biến áp suất dùng để kiểm tra
áp lực chất lỏng, áp suất máu, cảm biến siêu âm là một phần của máy nội soi dùng nhiều
trong y tế, xây dựng, chế tạo máy, encoder tích hợp trong động cơ servo cho các máy cnc, cánh tay robot,…
Câu 11:Trình bày các đặc điểm, nguyên lý sử dụng các loại cảm biến: Cảm biến quang;
Cảm biến nhiệt độ; Cảm biến vị trí và di chuyển; Cảm biến vận tốc và gia tốc; Cảm biến
biến dạng; Cảm biến lực và ứng suất … A, cảm biến quang:
*Đặc điểm: (đề ngắn thì ghi thêm)
Có nhiều loại cảm biến quang:
-Cảm biến quang thu phát độc lập (Thought Beam)
Độ tin cậy cao, Khoảng cách phát hiện xa, Không bị ảnh hưởng bởi bề mặt, màu sắc vật
-Cảm biến quang thu phát chung và loại Cảm biến quang khuếch đại: Dễ lắp đặt. Bị ảnh
hưởng bởi màu sắc, bề mặt vật, nền . . *cấu tạo:
Về cơ bản thì 1 cảm biến quang sẽ bao gồm 3 thành phần chính sau đây: -Bộ phận phát ánh sáng -Bộ phận thu ánh sáng
-Mạch xử lý tín hiệu đầu ra *nguyên lý hoạt động:
Cảm biến quang hoạt động dựa trên nguyên lý phát ánh sáng từ bộ phận phát sáng, sau đó bộ
phận thu sáng tiếp nhận và phân loại ánh sáng đó trước khi chuyển đến bộ phận xử lý tín hiệu
điện. Tại đây, tín hiệu sẽ được chuyển đổi theo tỉ lệ tranzito thành hai chế độ ON/OFF để phát
hiện sự hiện diện của vật thể.
B, Cảm biến nhiệt độ:
Cảm biến nhiệt độ là một thiết bị dùng để đo và đo lường nhiệt độ của một vật thể hoặc môi trường xung quanh. *cấu tạo:
-Thân cảm biến, đầu dò nhiệt, vật liệu cảm biến, đầu nối, dây dẫn.
*Nguyên lý hoạt động của cảm biến nhiệt độ:
-Các cảm biến nhiệt độ đo nhiệt độ bằng cách đo các thay đổi trong các đặc tính của vật
liệu như điện trở hoặc điện thế, khi nhiệt độ thay đổi. Các thay đổi này được đo và chuyển
đổi thành giá trị nhiệt độ tương ứng bằng các thiết bị đo điện hoặc các vi mạch điện tử.
( Nếu đề ngắn hoặc yêu cầu trình bày chi tiết: Nguyên lý hoạt động của cảm biến nhiệt độ
phụ thuộc vào loại cảm biến và nguyên lý đo nhiệt độ được sử dụng:
-Cảm biến nhiệt điện: Cảm biến nhiệt điện là một loại cảm biến sử dụng hiệu ứng Seebeck để đo nhiệt độ.
-Cảm biến RTD (Resistive Temperature Detector) sử dụng sự thay đổi của điện trở của một
kim loại khi nhiệt độ thay đổi để đo nhiệt độ.
- Cảm biến thermistor sử dụng sự thay đổi của điện trở của một vật liệu bán dẫn khi nhiệt
độ thay đổi để đo nhiệt độ. )
C, Cảm biến vị trí và di chuyển:
Có nhiều loại, trong đó phổ biến nhất là encoder. Encoder là loại cảm biến vị trí, đưa ra
thông tin về góc quay vị trí dưới dạng số mà không cần bộ ADC. *Cấu tạo:
- Đĩa quay được khoét lỗ gắn vào trục động cơ .
- Một đèn led làm nguồn phát sáng và 1 mắt thu quang điệnđược bố trí thẳng hàng.
- Mạch khuếch đại tín hiệu *Nguyên lý cấu tạo:
- Đèn led chiếu lên mặt đĩa có các rãnh. Khi đĩa quay, chỗ có đèn led sẽ chiếu xuyên qua
rãnh tới mắt thu, cứ mỗi lần mắt thu nhận được tín hiệu từ đèn led thì Encoder trả về một xung.
D, cảm biến vận tốc và gia tốc:
-Cảm biến tốc độ được cấu tạo từ một nam châm vĩnh cửu, một lõi từ và một cuộn dây.
Nguyên lý hoạt động của cảm biến tốc độ bánh xe ô tô dựa trên cảm ứng điện từ. Cấu tạo
của cảm biến tốc độ bánh xe bao gồm nam châm và bánh răng kim loại. Bánh răng kim loại
này sẽ chuyển động theo bánh xe. Khi bánh xe quay, bánh răng sẽ quay theo để tạo ra 1
dòng điện xoay chiều. Tín hiệu điện được đọc qua số lượng các xung theo thời gian, qua đó chuyển thành vận độ.
- Cảm biến gia tốc, còn được gọi là cảm biến gia tốc kế, là một thiết bị điện tử dùng để đo
lường gia tốc, tức là sự thay đổi trong tốc độ hoặc hướng của chuyển động
Thành phần chính của cảm biến này là một khối trọng lực bên trong thiết bị, thường được
gọi là khối trọng lực, được gắn một cách linh hoạt để có thể di chuyển theo các hướng khác
nhau. Cảm biến gia tốc thường sử dụng các thành phần như các bộ kỹ thuật số hoặc cơ học như tụ điện.
Các biến đổi về vị trí của khối đối tượng của khối trọng lực được chuyển thành các tín hiệu
điện trở hoặc điện dung, sau đó được ghi lại và xử lý bởi vi mạch trong cảm biến. Thông
qua quá trình này, cảm biến gia tốc có khả năng chuyển đổi thông tin về gia tốc thành tín
hiệu điện để sử dụng trong các ứng dụng khác nhau. e, cảm biến lực và áp suất: Cảm biến áp suất: *Cấu tạo:
Chân ren kết nối, màng đo áp suất, mạch chuyển đổi áp suất thành tín hiệu điện. *Nguyên lý:
Hoạt động dựa vào nguyên lý hiệu ứng áp điện. Vật liệu sẽ tạo ra điện khi phản ứng với
ứng suất. Tín hiệu điện được chuyển về bộ xử lý để tính toán ra áp suất.
Cảm biến lực, biến dạng:
Cảm biến lực hay Force sensor được định nghĩa là một bộ chuyển đổi có chức năng chuyển
đổi tải cơ học đầu vào như: trọng lượng, lực căng, kéo, nén hoặc áp suất thành tín hiệu điện đầu ra *cấu tạo:
Thiết bị đo biến dạng lá kim loại là một cảm biến có điện trở thay đổi theo lực tác dụng. *Nguyên lý:
Nói cách khác, lá kim loại chuyển đổi lực, áp suất, lực căng, nén, mô-men xoắn, trọng
lượng, v.v. thành sự thay đổi về điện trở, sau đó có thể đo được.
Strain gauges là các dây dẫn điện được gắn chặt vào màng theo hình zic zắc. Khi màng
này được kéo, nó – và các dây dẫn – sẽ kéo dài ra. Khi nó được đẩy, nó bị co lại và ngắn
hơn. Sự thay đổi hình dạng này làm cho điện trở trong dây dẫn điện cũng thay đổi. Biến
dạng được áp dụng trong cảm biến lực có thể được xác định dựa trên nguyên tắc này, vì
điện trở kháng của máy đo biến dạng tăng lên khi biến dạng và giảm đi khi co lại.
Câu 12: Phân biệt các tín hiệu trong xử lý số tín hiệu:
-Tín hiệu (signal) là vật mang thông tin
*Theo dạng của biến thời gian t và giá trị hàm số x(t), người ta phân loại tín hiệu như sau:
1. Tín hiệu liên tục x(t) là tín hiệu có biên thời gian liên tục.
Tín hiệu liên tục xác định liên tục theo thời gian, với giá trị hàm số có thể biến thiên liên tục
hoặc được lượng tử hoá, có thể tồn tại các điểm gián đoạn loại một hoặc loại hai. Trong đó: -
Tín hiệu lượng tử là tín hiệu chỉ nhận các giá trị xác định bằng số nguyên lần một giá
trị cơ sở gọi là giá trị lượng tử. -
Tín hiệu tương tự là tín hiệu liên tục có giá trị liên tục hoặc lượng tử. Các tín hiệu
tương tự cũng được gọi là tín hiệu Analog
2. Tín hiệu rời rạc x(nT) là tín hiệu có biến thời gian gián đoạn t= nT
Tín hiệu rời rạc chỉ xác định ở những thời điểm gián đoạn t = nT, không xác định trong các
khoảng thời gian ở giữa hai điểm gián đoạn.
- Có thể thu được trong quá trình lấy mẫu tín hiệu liên
tục - Xử lý tín hiệu số yêu cầu việc biểu diễn tín hiệu
gián đoạn Tín hiệu rời rạc chia ra:
-Tín hiệu lấy mẫu: Nếu biên độ của tín hiệu rời rạc là liên tục và không bị lượng tử hóa thì gọi
là tín hiệu lấy mẫu.Tín hiệu lấy mẫu rời rạc theo biến, liên tục theo hàm
-Tín hiệu số là nhóm xung được mã hoá theo giá trị lượng tử của tín hiệu tại các thời điểm rời
rạc cách đều nhau. Tín hiệu số rời rạc theo cả biến và hàm
Mỗi xung của tín hiệu số biểu thị một bit của từ mã, nó chỉ có hai mức điện áp, mức điện áp
thấp là giá trị logic ”0”, mức cao là giá trị logic ”1”.
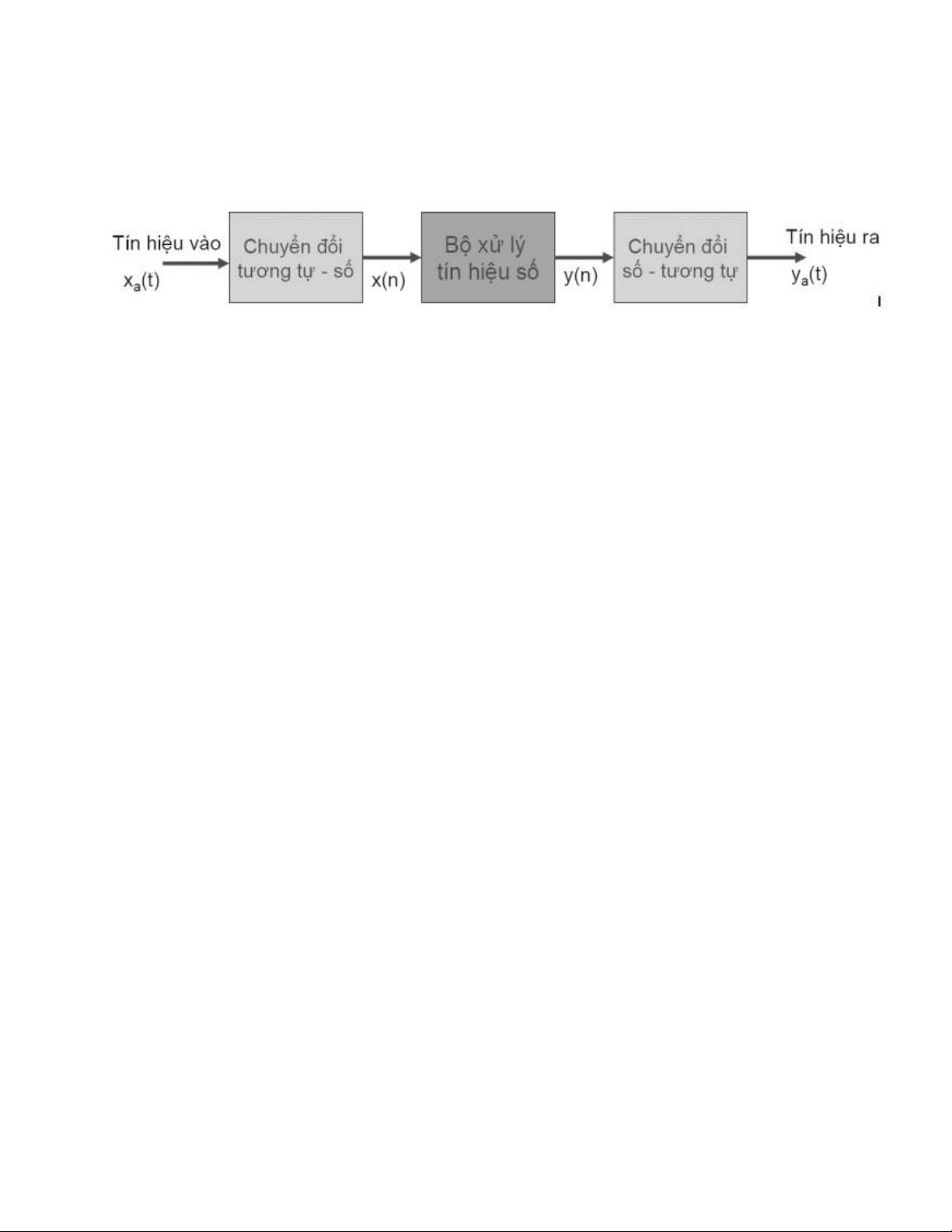
Câu 13: Trình bày các khâu cơ bản trong xử lý tín hiệu số. So sánh ưu nhược điểm của
xử lý số so với xử lý tương tự.
Xử lý tín hiệu là quá trình dùng các mạch điện, điện tử, máy tính,…tác động lên tín hiệu tạo
ra tín hiệu theo cách mong muốn.
-Chuyển đổi tương tự - số (Analog-to-digital conversion process) Quá trình số hóa tín hiệu
thành chuỗi bit, bao gồm stamper(lấy mẫu thông tin), quantizer(lượng tử hoá tín hiệu),và
coder(mã hoá tín hiệu) -Bộ xử lý tín hiệu số: +Lấy mẫu: fn =f(nT)
+Tính toán: tại mỗi giá trị mẫu sẽ được tính toán lại phù hợp với thuật toán sử dụng trong bộ xử lý
+ Tái cấu trúc: Các giá trị sau khi xử lý sẽ được tái cấu trúc để tạo lại dạng tín hiệu liên tục
-Chuyển đổi số - tương tự: chuyển tín hiệu từ dạng chuỗi bit sang tín hiệu tương tự.
*Ưu điểm của phương pháp xử lý tín hiệu số (Digital Signal Processing - DSP): 1.
Khả năng xử lý và phân tích tín hiệu phức tạp: DSP cho phép thực hiện các phép
tính phức tạp trên tín hiệu số, như biến đổi Fourier, biến đổi Laplace, lọc thông, lọc tần số... 2.
Dễ dàng lưu trữ và truyền tín hiệu: Tín hiệu số có thể được lưu trữ dễ dàng trên các
thiết bị lưu trữ kỹ thuật số như ổ cứng, bộ nhớ flash. Ngoài ra, tín hiệu số cũng có thể
truyền qua các kênh truyền thông số như mạng internet, tín hiệu điện thoại, mạng di động v.v. 3.
Khả năng xử lý số liệu lớn: Các thuật toán số học phức tạp có thể được áp dụng để
xử lý số liệu và trích xuất thông tin quan trọng một cách hiệu quả.
*Nhược điểm của phương pháp xử lý tín hiệu số: 1.
Tốn nhiều tài nguyên tính toán: Xử lý tín hiệu số yêu cầu sử dụng nhiều tài nguyên
tính toán, bao gồm công suất xử lý và bộ nhớ. 2.
Thiếu linh hoạt. Việc thay đổi tham số hay điều chỉnh mạch xử lý tín hiệu số có thể
phức tạp hơn so với xử lý tín hiệu tương tự. 3.
Mất thông tin: Quá trình chuyển đổi từ tín hiệu tương tự sang tín hiệu số có thể gây mất mát thông tin.
Câu 14: Vai trò và đặc điểm của hệ thống điều khiển trong Cơ điện tử: *Vai trò:
-Bộ điều khiển là “trí tuệ" của hệ thống cơ điện tử, trong đó xử lý và gửi lệnh đk đến các cơ
cấu chấp hành trong hệ thống.
-Có vai trò quan trọng trong việc duy trì hoạt động ổn định, điều chỉnh và điều khiển các thành
phần, quản lý nguồn điện và tối ưu hoá hiệu suất của hệ thống. *Đặc điểm:
Các đặc điểm chính của hệ thống điều khiển trong một hệ cơ điện tử bao gồm: 1.
Phản hồi: Hệ thống điều khiển trong hệ cơ điện tử thường có chức năng phản hồi, tức
là nó sử dụng thông tin phản hồi về trạng thái hoặc hiệu suất của hệ thống để điều chỉnh và
điều khiển. Phản hồi giúp hệ thống điều chỉnh mục tiêu và đáp ứng theo yêu cầu. 2.
Độ chính xác: Hệ thống điều khiển trong hệ cơ điện tử thường được thiết kế để đạt
được độchính xác cao. Điều này đảm bảo rằng hệ thống hoạt động chính xác và đáp ứng
đúng các yêu cầu quy định. 3.
Tính ổn định: Một hệ thống điều khiển trong hệ cơ điện tử cần có tính ổn định để đảm
bảo rằng hoạt động của hệ thống không bị dao động hay bất ổn. Tính ổn định giúp đảm bảo
rằng hệ thống điều khiển hoạt động một cách đáng tin cậy và ổn định trong mọi điều kiện. 4.
Tính linh hoạt: Hệ thống điều khiển trong hệ cơ điện tử cần có tính linh hoạt để có thể
thích ứng với các yêu cầu và điều kiện khác nhau. Nó có thể được điều chỉnh, hiệu chỉnh và
điều khiển một cách linh hoạt để đáp ứng các yêu cầu cụ thể của hệ thống. 5.
Tính ổn định ngoại vi: Hệ thống điều khiển trong hệ cơ điện tử cần có tính ổn định ngoại
vi, tức là nó cần đảm bảo rằng các yếu tố ngoại vi như nhiễu, biến thiên nhiệt độ, sự mất mát
trong hệ thống, v.v. không gây ảnh hưởng đáng kể đến hiệu suất hoạt động của hệ thống. 6.
Tính tương thích: Hệ thống điều khiển trong hệ cơ điện tử cần có tính tương thích, tức
là nócần tương thích với các thành phần và mô-đun khác trong hệ thống. Nó phải có khả năng
giao tiếp và tương tác với các thành phần khác để đảm bảo hoạt động hợp lý và hiệu quả của hệ thống.
Tất cả những đặc điểm này đóng vai trò quan trọng trong việc đảm bảo hoạt động ổn định,
chính xác và hiệu quả của hệ thống điều khiển trong một hệ cơ điện tử.
(chat gpt chứ k tìm dc tài liệu nào)
Câu 15: Trình bày các bước cơ bản để thực hiện một bài toán điều khiển. Đặc điểm
và ý nghĩa của các bước đó.
Trình bày các cấu trúc cơ bản trong một hệ thống điều khiển.
Ý nghĩa và vai trò của khâu xây dựng mô hình toán học trong các hệ điều khiển trong cơ điện tử.
Định nghĩa hàm truyền đạt, hàm trọng lượng, hàm quá độ, nêu công thức và cách xác định các hàm này.
Ý nghĩa và vai trò của khâu phân tích hệ thống và thiết kế bộ điều khiển.
Trình bày các tiêu chuẩn đại số và hình học sử dụng trong quá trình phân tích hệ thống.
Trình bày đặc điểm và phạm vi ứng dụng của bộ điều khiển logic khả lập trình PLC
Trình bày vai trò và ý nghĩa của hệ thống vi xử lý trong lĩnh vực cơ điện tử. Đặc điểm
các bộ vi xử lý mà em đã được học
Tài liệu liên quan:
-

Chương 5 - Hệ xử lý ảnh môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
156 78 -
Bài giảng thực hành lắp đặt xe tự hành môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
107 54 -

Đạo hàm và tích phân | Bài giảng môn Phương pháp tính và matlab CTTT | Đại học Bách khoa hà nội
223 112 -

Số gần đúng và sai số | Bài giảng môn Phương pháp tính và matlab CTTT | Đại học Bách khoa hà nội
237 119