Chương 5 - Hệ xử lý ảnh môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
Hệ thống xử lý ảnh là công nghệ và các phương pháp được sử dụng để tự động phân tích và kiểm tra dựa trên xử lý ảnh dùng cho các ứng dụng như kiểm tra tự động, điều khiển quá trình, và dẫn hướng rô bốt trong công nghiệp. Tài liệu được sưu tầm gồm 29 trang, giúp các bạn ôn luyện và phục vụ cho việc học tập, đạt kết quả tốt. Mời các bạn đón xem!
Môn: Nhập môn Cơ điện tử CTTT (Fundamental of Mechatronics) 12 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:
Preview text:
TR ƯỜ NG ĐẠ I H Ọ C BÁCH KHOA HÀ N Ộ I
HANOI UNIVERSITY OF SCIENCE AND TECHNOLOGY
Nh ậ pmônC ơđ i ệ nt ử
Introduction to Mechatronics
Gi ả ngviên: TS. Nguy ễ nAnhTu ấ n
B ộ mônC ơđ i ệ nt ử – Đ HBK HàN ộ i Email: bktuan2000@gmail.com
Ch ươ ng5.H ệ x ử lý ả nh
5.1 .Gi ớ ithi ệ u .Ph 5.2
ầ nt ử c ơ b ả n .Phânlo 5.3 ạ i
5.4 .Cácb ướ cc ơ b ả nc ủ ax ử lý ả nh .Thôngs 5.5
ố k ỹ thu ậ t Giớ ệ ổ
i thi u t ng quan
H ệ th ố ng x ử lý ả nh là công ngh ệ và các ph ươ ng pháp đượ c s ử
d ụ ng để t ựđộ ng phân tích và ki ể m tra d ự a trên x ử lý ả nh dùng cho
các ứ ng d ụ ng nh ư ki ể m tra t ựđộ ng, đ i ề u khi ể n quá trình, và d ẫ n
h ướ ng rô b ố t trong công nghi ệ p .
Các ứ ng d ụ ng
Đ i ề u khi ể n quá trình
Đ i ề u khi ể n ch ấ t l ượ ng
Các ứ ng d ụ ng phi công nghi ệ p (ví d ụ nh ưđ i ề u khi ể n giao thông). 3 Giớ ệ ổ
i thi u t ng quan
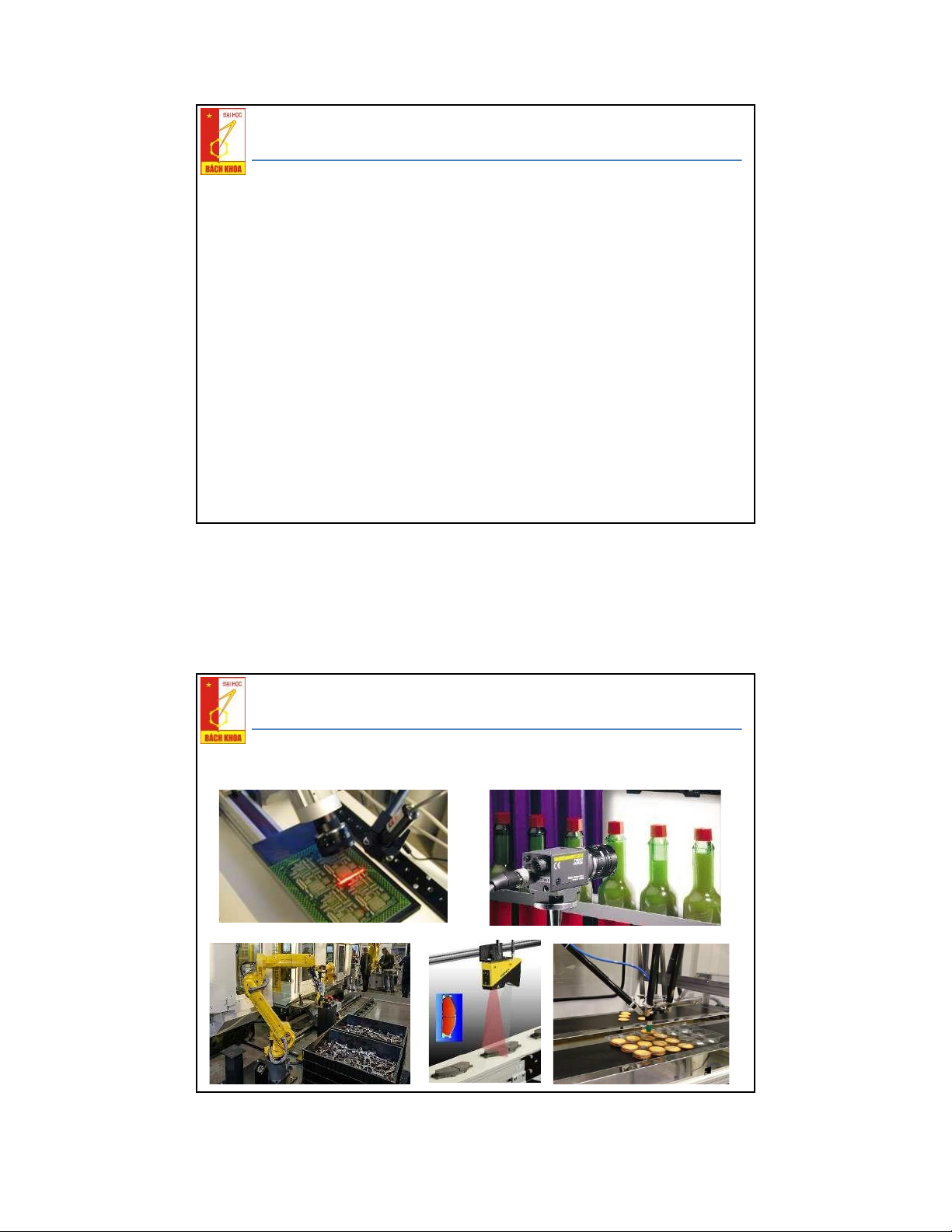
Các ứ ng d ụ ng trong công nghi ệ p 4 Giớ ệ ổ
i thi u t ng quan
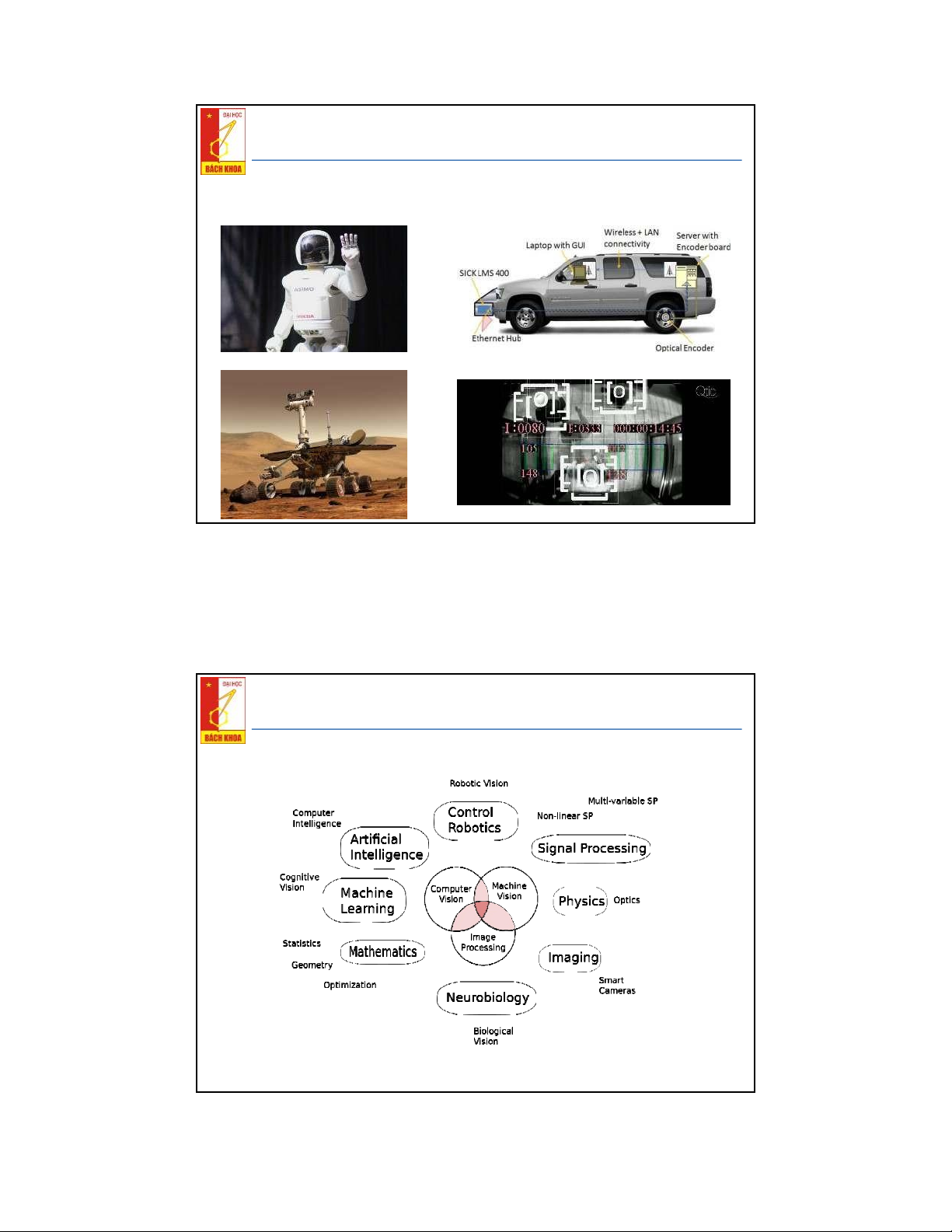
Các ứ ng d ụ ng trong đờ i s ố ng people counter 5
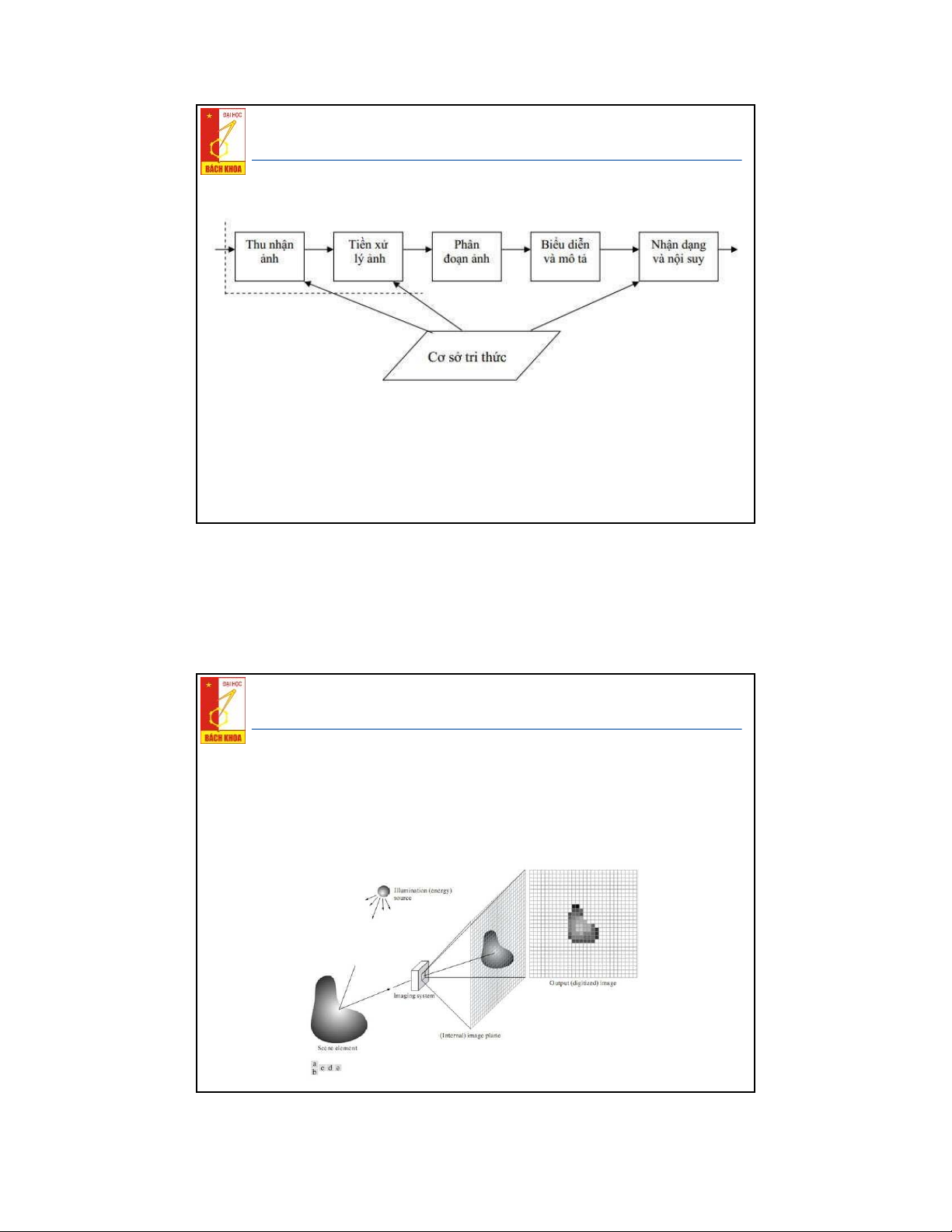
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
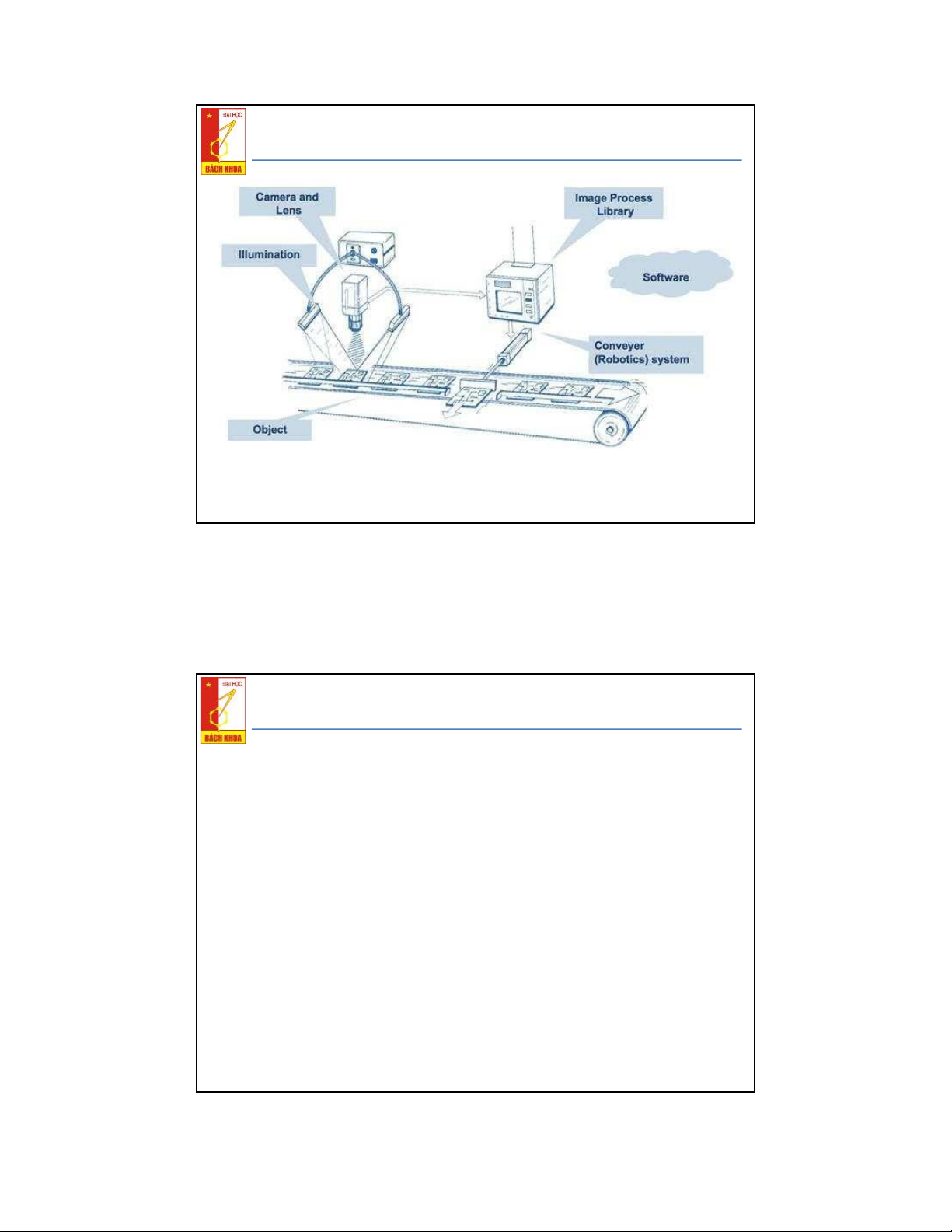
• Hệ thống xử lý ảnh với các lĩnh vực khác:
Xử lý ảnh trong thị giác máy tính-máy và xử lý ảnh 6
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
Bộ phận cơ bản của hệ thống xử lý ảnh công nghiệp 7
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
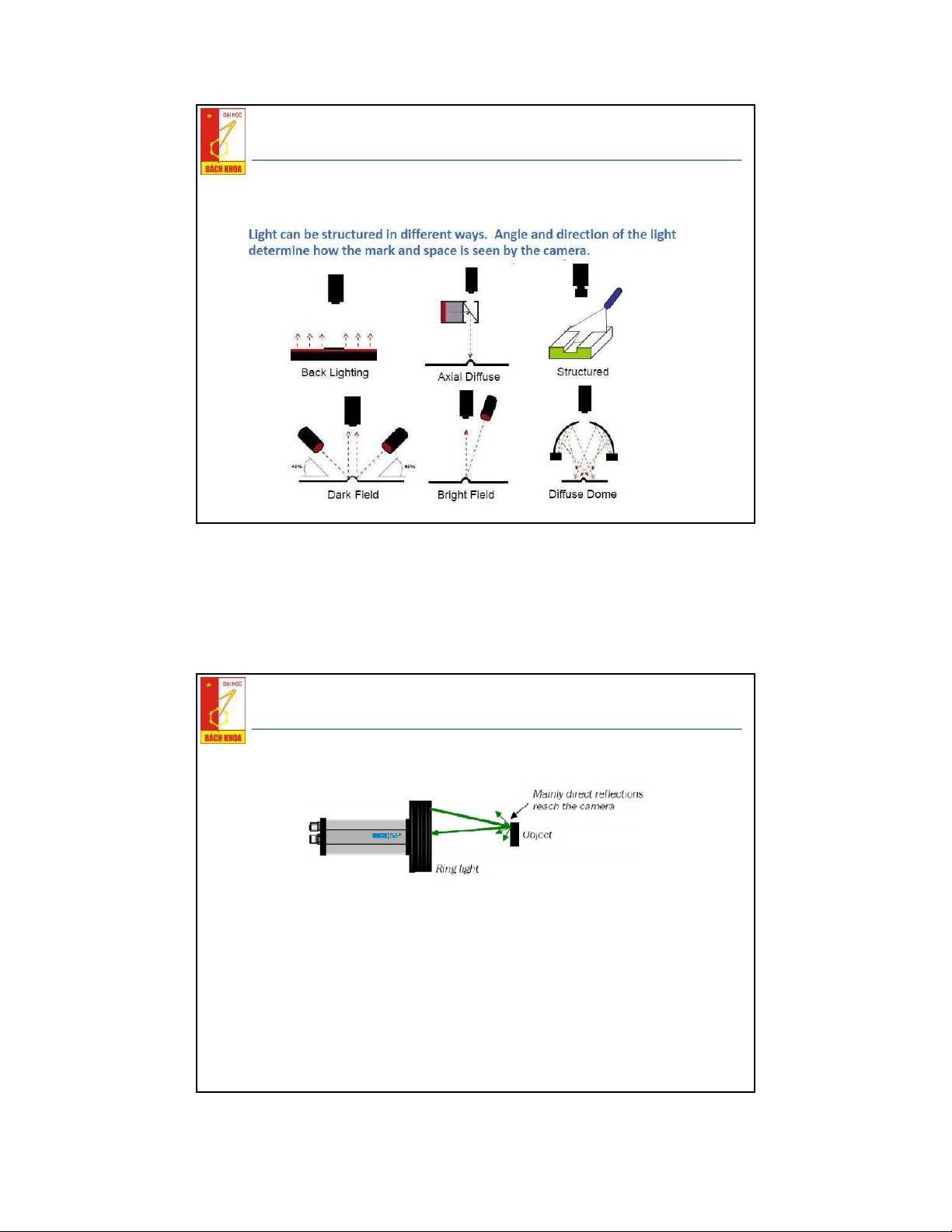
• Hệ thống chiếu sáng ( Ilummination ) : tạo môi trường ánh sáng để
camera có thể chụp được chính xác ảnh, một số trường hợp có thể
sử dụng ánh sáng môi trường ( đơn vị: flux )
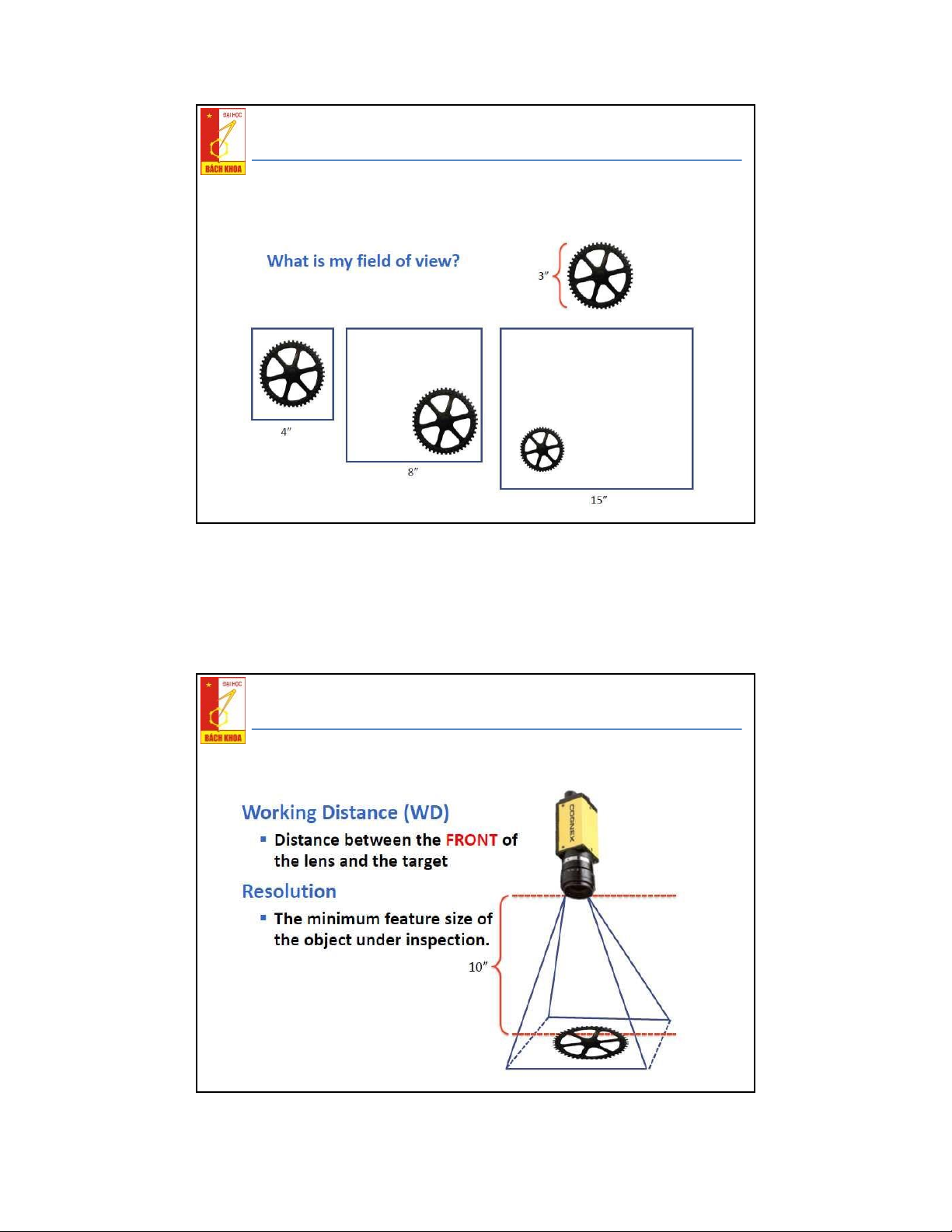
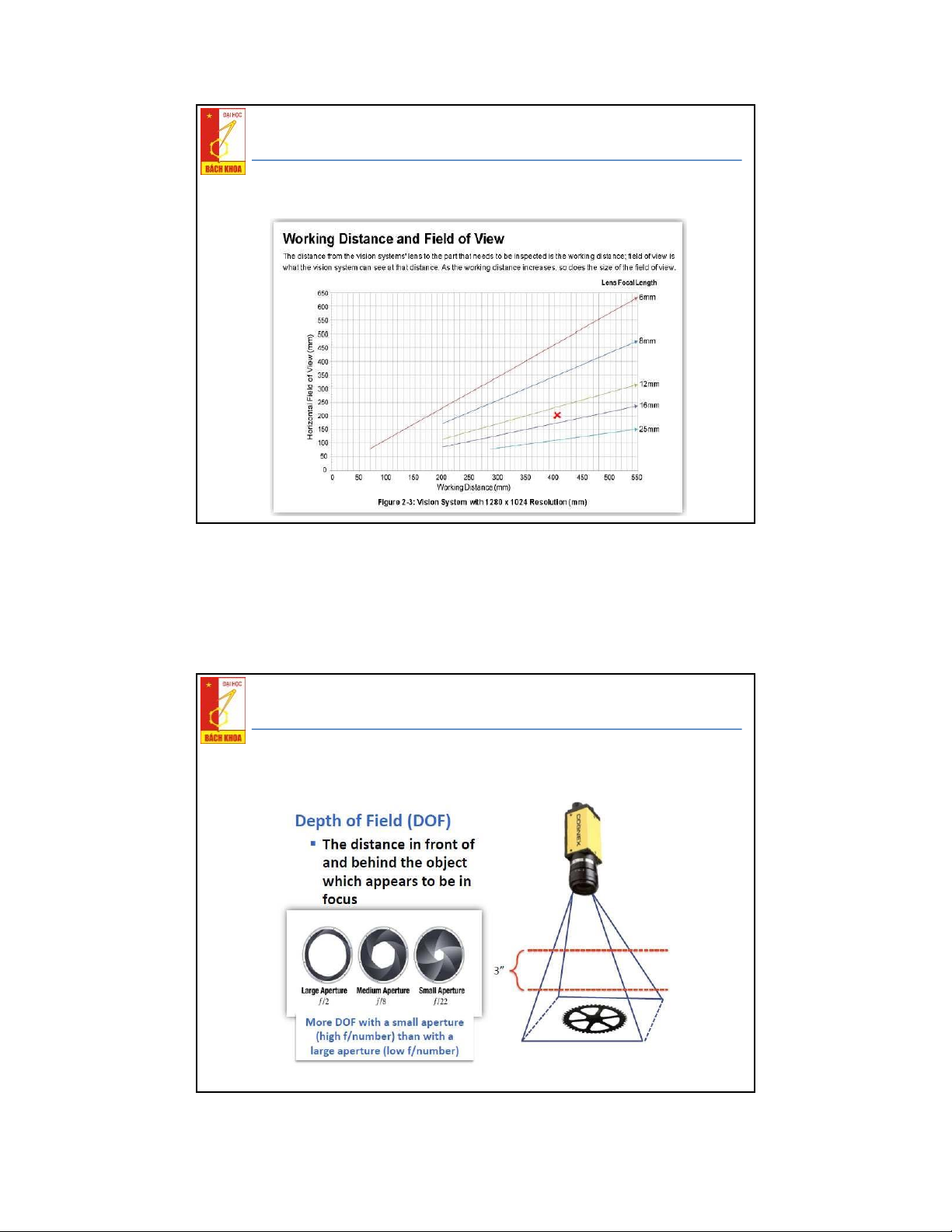
• Hệ thấu kính ( lens ) : Việc lựa chọn chính xác hệ thấu kính để điều
chỉnh cho phép độ phân giải và độ nét của ảnh tối ưu.
• Camera: Thiết bị chụp ảnh, trong hệ thống có thể phối hợp nhiều camera.
• Thiết bị xử lý ảnh ( Image processing device ) : Tích hợp chương trình
và thuật toán để xử lý dữ liệu ảnh. 8
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệthốngchiếusáng ( llummination ) : 9
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
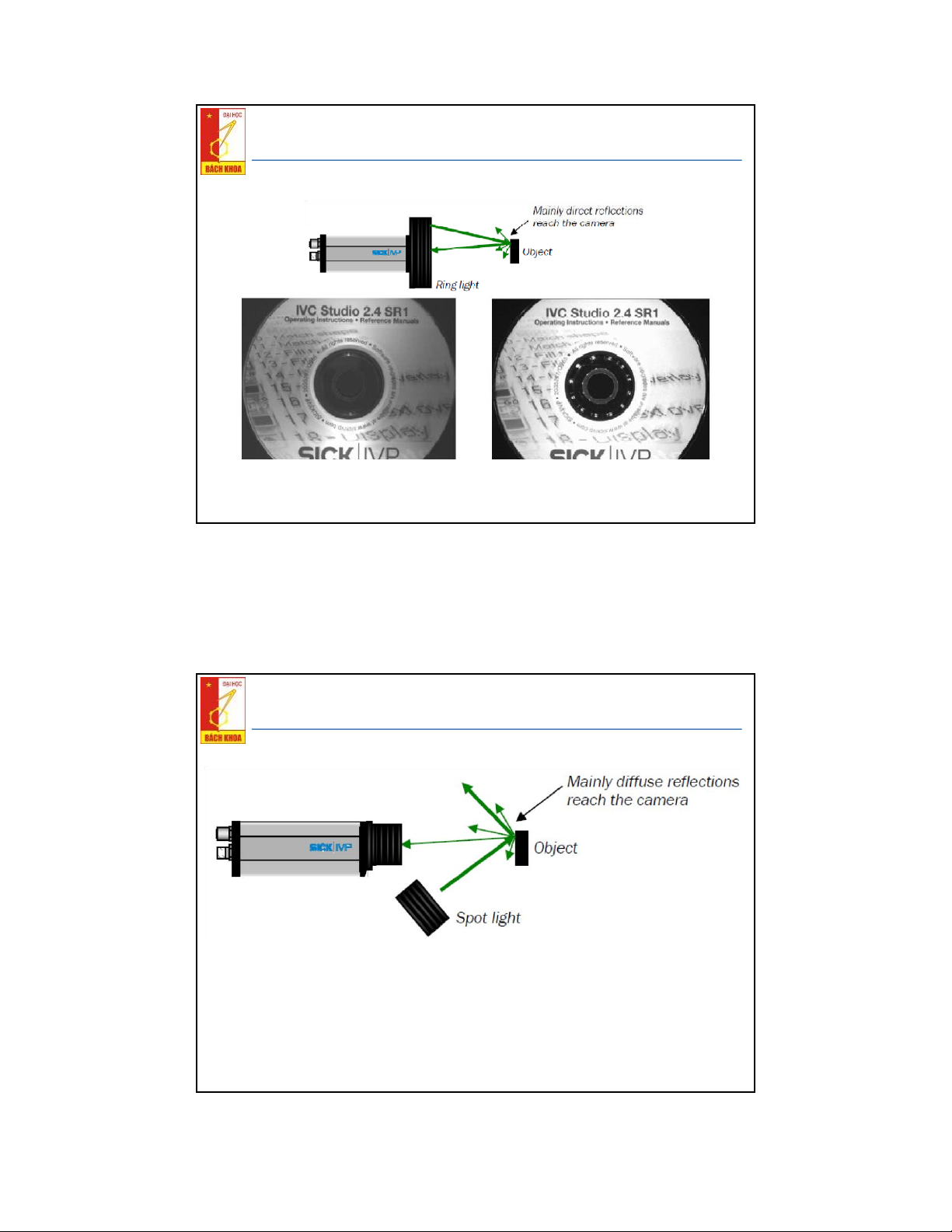
• Hệ thống chiếu sáng ( llummination ) : Ring light
M ộ t vòng ánh sáng đượ c g ắ n xung quanh tr ụ c quang c ủ a ố ng kính, ho ặ c
trên máy ả nh ho ặ c ở kho ả ng gi ữ a máy ả nh và v ậ t th ể . Góc t ỷ l ệ ph ụ thu ộ c
vào đườ ng kính vòng, v ị trí đặ t ánh sáng, và ở góc độ nào các đ èn LED đượ c nh ắ m vào.
Ư u đ i ể m • D ễ s ử d ụ ng
• C ườ ng độ cao và th ờ i gian ph ơ i sáng ng ắ n
Nh ượ c đ i ể m
• Ph ả n x ạ tr ự c ti ế p trên b ề m ặ t ph ả n chi ế u, đượ c g ọ i là đ i ể m chói (hot spots) 10
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thống chiếu sáng ( llummination ) : Ring light Ambient light/
Ring light/ Vòng ánh sáng. B Ánh sáng môi tr ng
ề m ặ t in m ờ đượ c chi ế u sáng đồ ng đề u. Các đ iể m ườ
chói xu ấ t hi ệ n trên các b ề m ặ t sáng bóng (gi ữ a), ứ ng xung quanh.
v ớ i 12 đ èn LED c ủ a ring light. 11
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
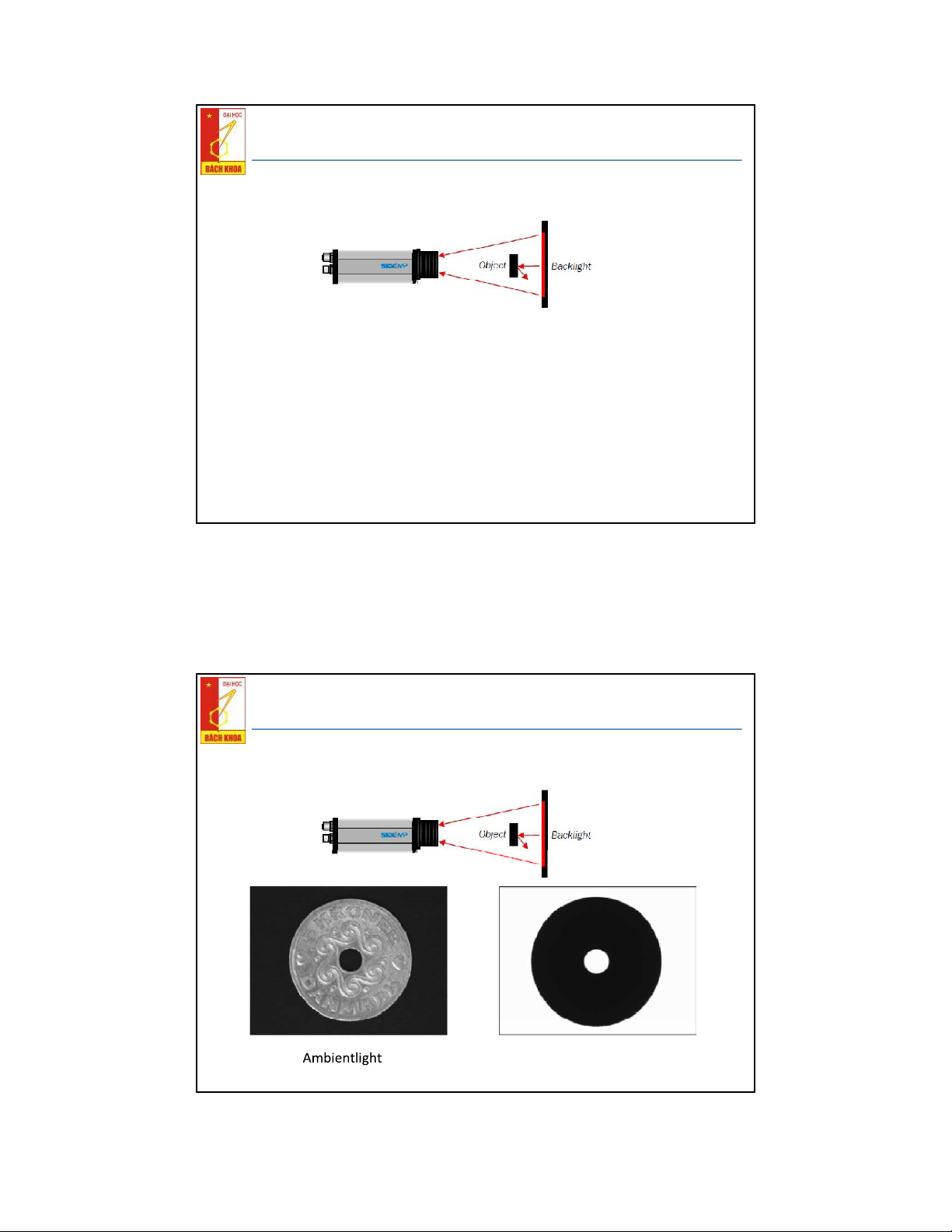
• Hệthốngchiếusáng ( llummination ) : Spotlight/Tiêuđiểm
M ộ t ngu ồ n phát sáng tiêu đ i ể m ( spot light) có t ấ t c ả ánh sáng phát ra t ừ m ộ t
h ướ ng ( tia sáng ) khác v ớ i tr ụ c quang . Đố i v ớ i các v ậ t th ể ph ẳ ng, ch ỉ ph ả n x ạ
khu ế ch tán m ớ i đế n đượ c camera.
Ư u đ i ể m
• Không có đ i ể m chói
Nh ượ c đ i ể m
• Chi ế u sáng không đồ ng đề u
• Yêu c ầ u ánh sáng c ườ ng độ cao vì nó ph ụ thu ộ c vào ph ả n x ạ khu ế ch tán 12
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
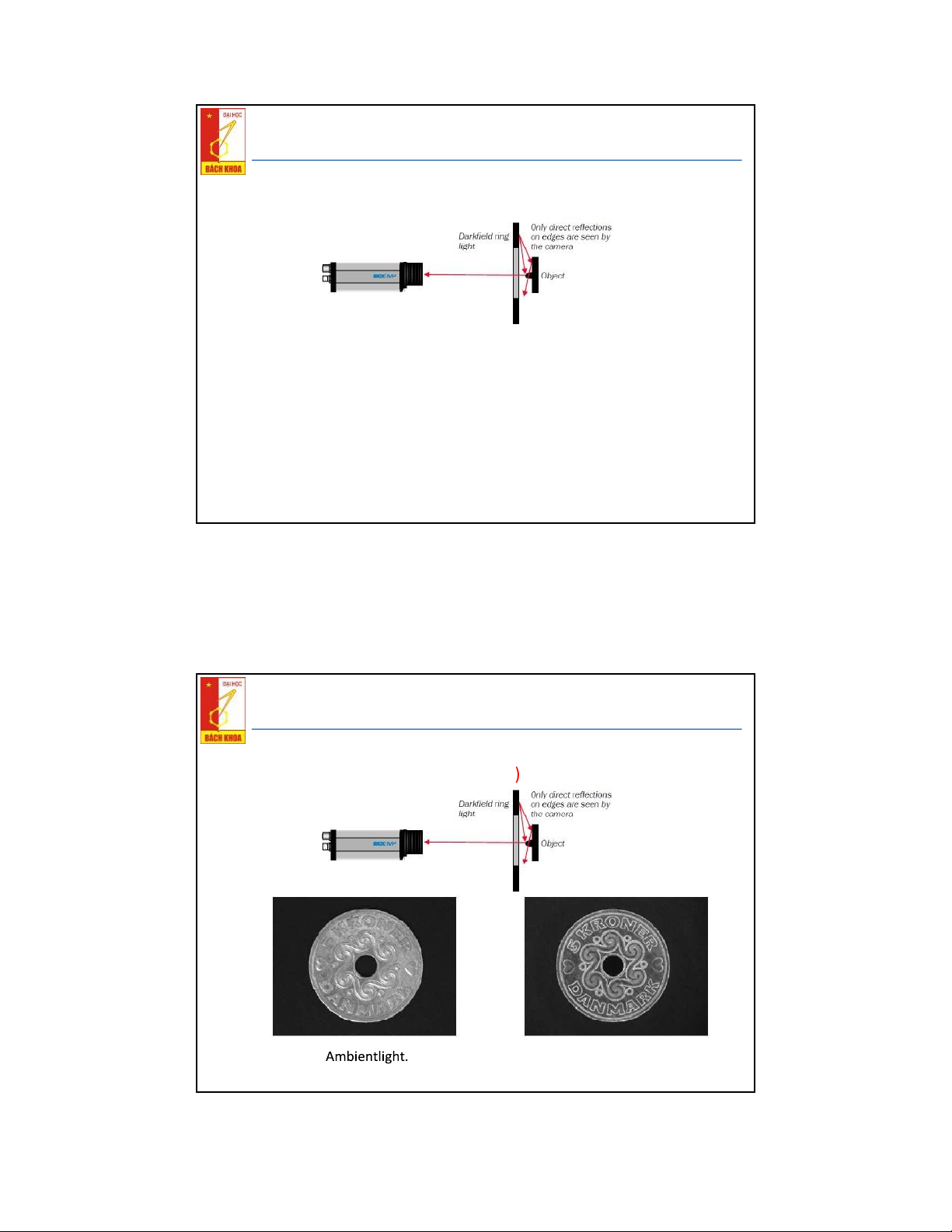
• Hệ thống chiếu sáng ( llummination ) : Back light/ Đèn nền
- Nguyên lý c ủ a h ệ th ố ng back light/ đ èn n ề n là đố i t ượ ng đượ c chi ế u
sáng t ừ phía sau để t ạ o ra đườ ng vi ề n ho ặ c hình bóng .
- Thông th ườ ng, đ èn n ề n đượ c g ắ n vuông góc v ớ i tr ụ c quang.
Ư u đ i ể m
• Độ t ươ ng ph ả n r ấ t t ố t
• B ề n v ữ ng v ề k ế t c ấ u, màu s ắ c và ánh sáng xung quanh
Nh ượ c đ i ể m
• Kích th ướ c ph ả i l ớ n h ơ n đố i t ượ ng 13
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thống chiếu sáng ( llummination ) : Back light
Backlight: T ă ng c ườ ng đườ ng nét b ằ ng
cách t ạ o hình bóng. 14
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thống chiếu sáng ( llummination ) : Dark field
Dark field có ngh ĩ a là đố i t ượ ng đượ c chi ế u sáng ở góc độ l ớ n . Ph ả n x ạ tr ự c
ti ế p ch ỉ x ả y ra khi có các c ạ nh . Ánh sáng chi ế u trên các b ề m ặ t ph ẳ ng không
đượ c ph ả n x ạ t ớ i camera.
Ư u đ i ể m
• T ă ng c ườ ng phát hi ệ n các v ế t tr ầ y x ướ c, các c ạ nh nhô ra và b ụ i b ẩ n trên b ề m ặ t
Nh ượ c đ i ể m
• Ch ủ y ế u ho ạ t độ ng trên b ề m ặ t ph ẳ ng v ớ i các đặ c đ i ể m c ấ u trúc nh ỏ
• Yêu c ầ u kho ả ng cách nh ỏ t ớ i đố i t ượ ng
• Đố i t ượ ng c ầ n đượ c ph ả n x ạ m ộ t ph ầ n
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thống chiếu sáng llu
( mmination) : Dark field
Dark field: T ă ng c ườ ng đườ ng nét
b ổ tr ợ , ví d ụ làm sáng lên các c ạ nh, 16
đườ ng nét.
Các bộ phận cơ bản của hệ thống xử lý ảnh
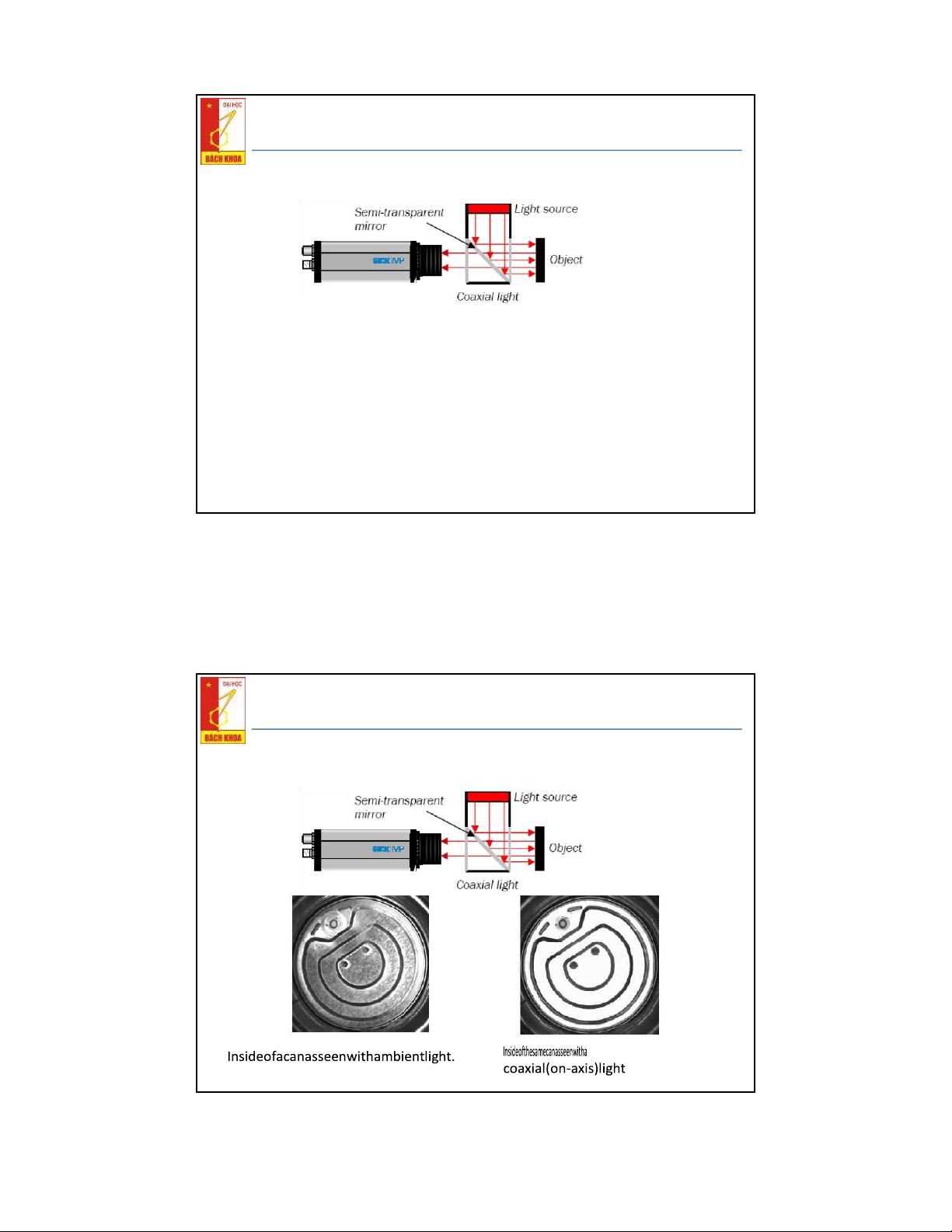
• Hệ thống chiếu sáng (llummination): On-axial light
Khi một đối tượng cần được chiếu sáng song song với trục quang, tức là trực
tiếp từ mặt trước, một gương bán trong suốt được sử dụng để tạo nguồn sáng
trên trục (on-axial light ). Trên trục cũng được gọi là đồng trục. Vì các chùm tia
song song với trục quang, phản xạ trực tiếp xuất hiện trên tất cả các bề mặt
song song với mặt phẳng tiêu cự. Ưu điểm
• Độ chiếu sáng cao, không có điểm chói
• Độ tương phản cao trên các vật liệu có độ phản xạ khác nhau Nhược điểm
• Cường độ thấp đòi hỏi thời gian phơi sáng lâu
• Cần làm sạch gương bán trong suốt (bộ tách chùm tia) thường xuyên 17
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thống chiếu sáng ( llummination ) : On-axial light 18
Các bộ phận cơ bản của hệ thống xử lý ảnh
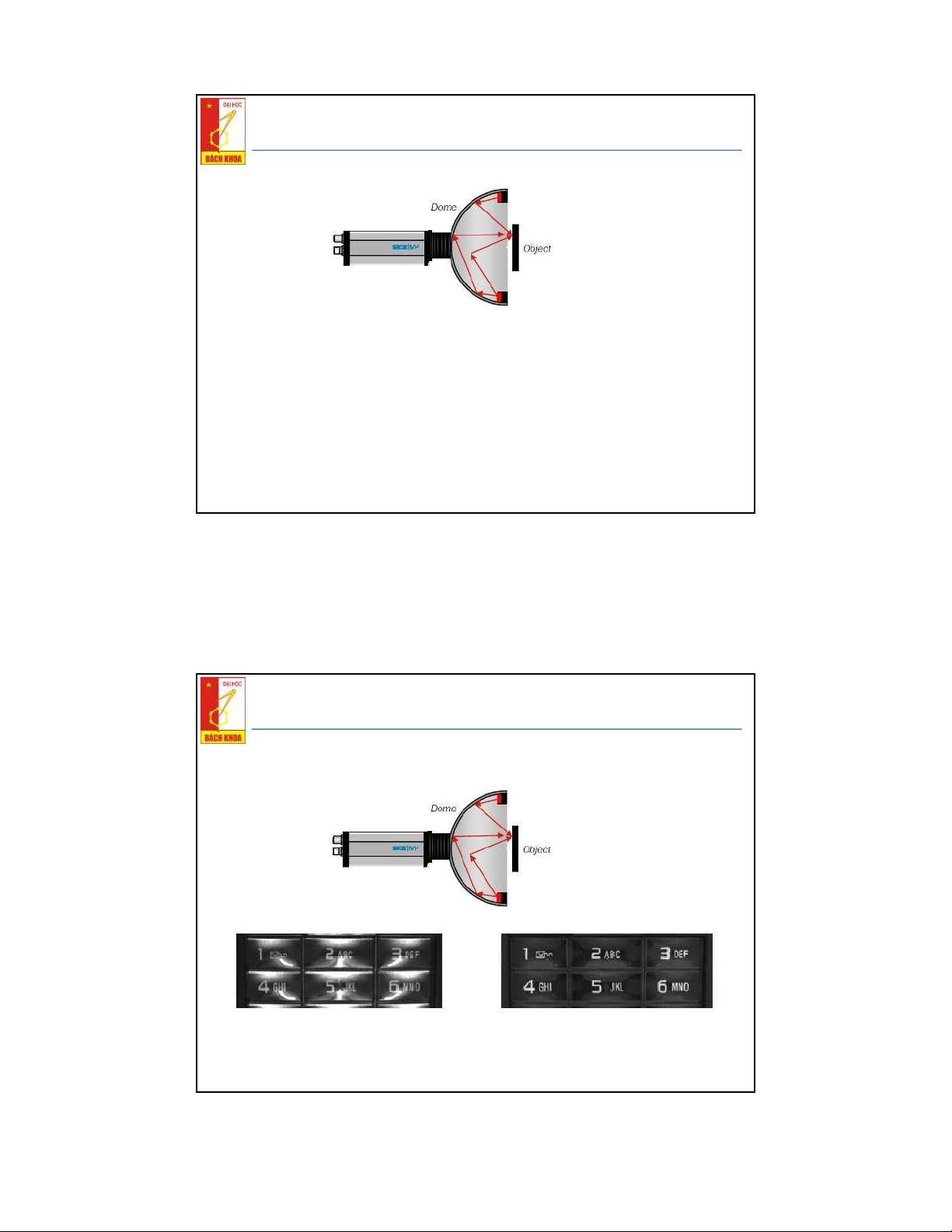
• Hệ thống chiếu sáng (llummination): Dome light
Vật liệu bóng có thể đòi hỏi một ánh sáng khuếch tán mạnh mà không có các điểm
chói/hot spots hoặc bóng tối. Ánh sáng mái vòm tạo ra cường độ ánh sáng đồng đều
cần thiết nhờ sự chiếu sáng của đèn LED bên trong thành mái vòm. Phần giữa hình
ảnh trở nên tối hơn vì không có phản xạ tại lỗ trong mái vòm, nơi camera chiếu qua. Ưu điểm
• Hoạt động tốt trên vật liệu phản quang cao
• Chiếu sáng đồng đều, ngoại trừ phần giữa của hình ảnh tối hơn. Không có điểm chói Nhược điểm
• Cường độ thấp đòi hỏi thời gian phơi sáng lâu
• Kích thước phải lớn hơn đối tượng
• Vùng tối ở giữa hình ảnh 19
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thống chiếu sáng ( llummination ) : Dome light
Ambient light. Trên đầ u c ủ a các phím
Ph ả n x ạ tr ự c ti ế p đượ c lo ạ i b ỏ b ở i
s ố là m ặ t cong, trong su ố t gây ra ph ả n
ánh sáng chi ế u c ủ a mái vòm
x ạ tr ự c ti ế p. 20
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệthốngchiếusáng ( llummination ) : Laserline
Ki ể m tra độ t ươ ng ph ả n th ấ p và c ấ u trúc 3D th ườ ng yêu c ầ u 3D camera. Trong
tr ườ ng h ợ p đơ n gi ả n h ơ n, độ chính xác và t ố c độ không quan tr ọ ng, m ộ t camera
2 D laser có th ể cung c ấ p gi ả i pháp ti ế t ki ệ m chi phí.
Ư u đ i ể m
• Ch ố ng l ạ i ánh sáng xung quanh.
• Cho phép đ o chi ề u cao (z song song v ớ i tr ụ c quang).
• Chi phí th ấ p h ơ n cho các ứ ng d ụ ng 3D đơ n gi ả n.
Nh ượ c đ i ể m
• Các v ấ n đề v ề an toàn laser.
• D ữ li ệ u d ọ c theo y b ị m ấ t do ư u tiên c ủ a d ữ li ệ u z (chi ề u cao).
• Độ chính xác th ấ p h ơ n 3D camera. 21
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
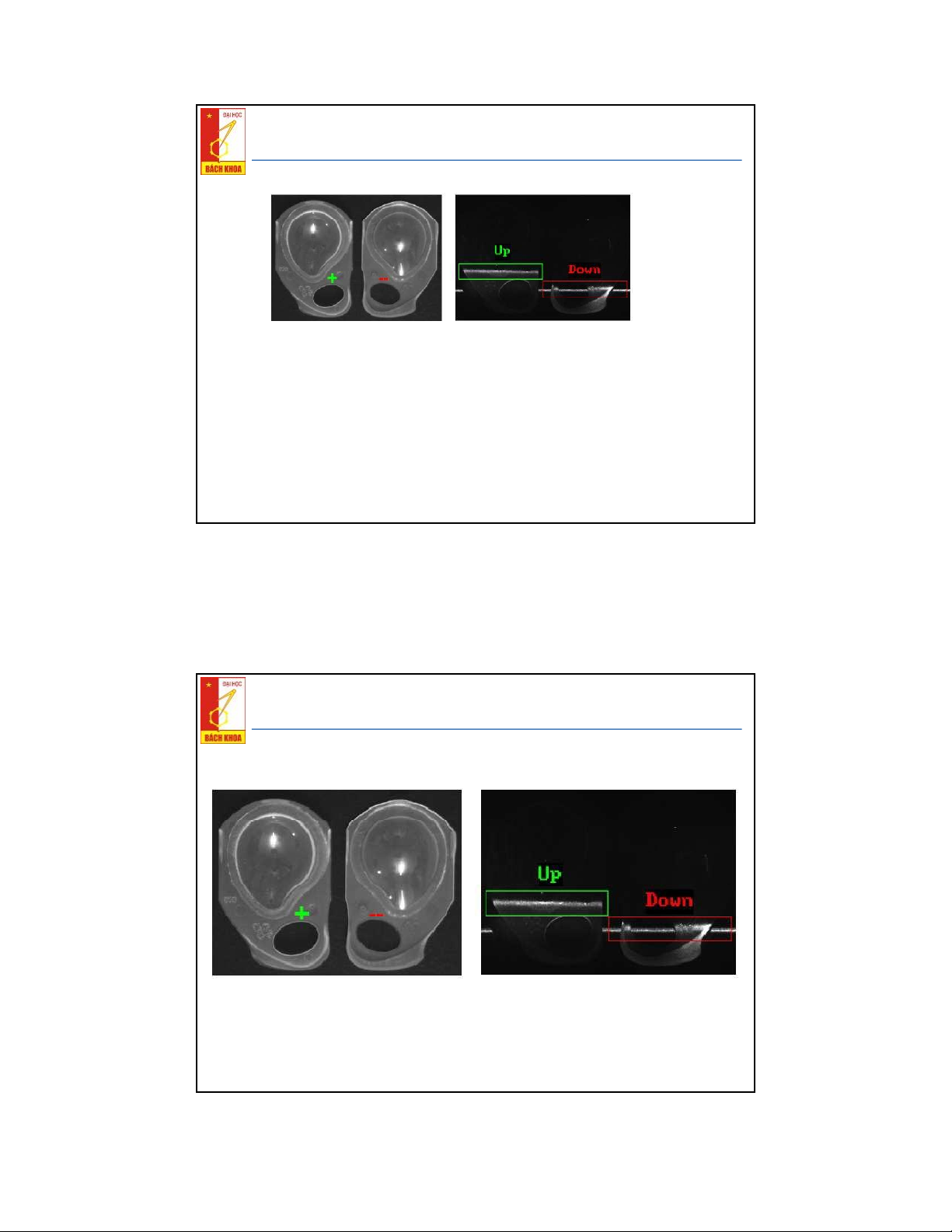
• Hệthốngchiếusáng ( llummination ) : Laserline Ambientlight.
Tia laser cho th ấ y rõ ràng s ự khác
Bên trái m ặ t trên (cao 5 mm t ạ i v ị trí +)
biệ t về chiề u cao.
và bên ph ả i úp xu ố ng (cao 1 mm t ạ i v ị trí -)
Khó phân bi ệ t đượ c s ự chênh
l ệ ch chi ề u cao 22
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
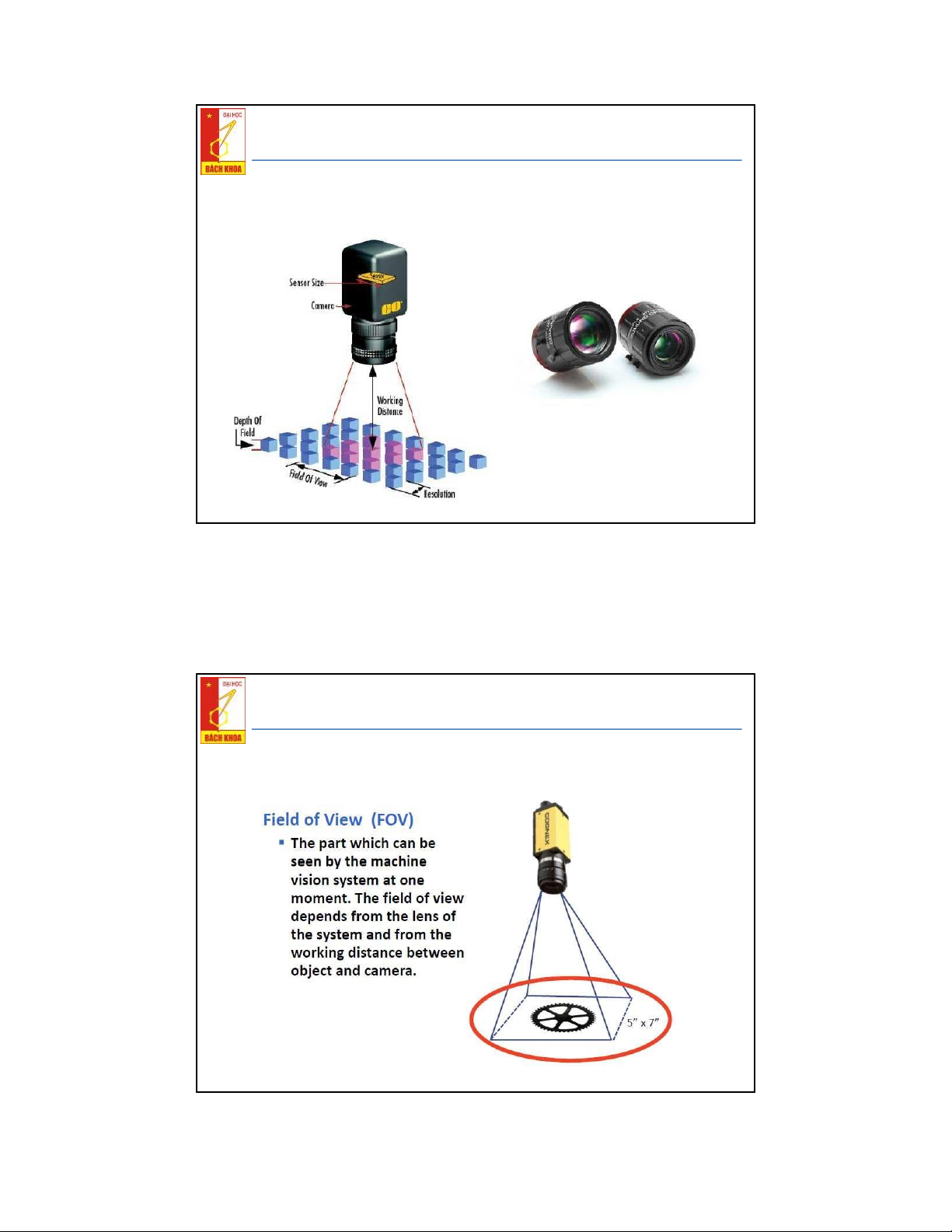
• Hệthấukính ( lens ) vàCamera: 23
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thấu kính ( lens ) và Camera: 24
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thấu kính ( lens ) và Camera: 25
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệthấukính ( lens ) vàCamera: 26
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thấu kính ( lens ) và Camera: 27
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thấu kính ( lens ) và Camera: 28
Các b ộ ph ậ n c ơ b ả n c ủ a h ệ th ố ng x ử lý ả nh
• Hệ thấu kính ( lens ) và Camera: 29
Phân lo ạ ih ệ th ố ng x ử lý ả nh
• Hệthốngxửlýảnh1chiều:
H ệ th ố ngx ử lý ả nh1D phân
tích m ộ t tín hi ệ u s ố theot ừ ng
line(r ộ ng1 pixel) t ạ i m ộ t th ờ i
đ i ể m thay vì quansáttoàn b ộ
“b ứ c tranh”cùng m ộ t lúc
K ỹ thu ậ t này th ườ ng phát hi ệ n
và phân lo ạ i các khuy ế t t ậ t trên
các v ậ t li ệ u đượ c s ả n xu ấ t
trong quy trình liên t ụ c, víd ụ
nh ư gi ấ y, kim lo ạ i, nh ự a và các
m ặ t hàng d ạ ngcu ộ n
1 D vision systems scan one line at a time while the process moves. In the
above example, a defect in the sheet is detected. 30
Phân lo ạ ih ệ th ố ng x ử lý ả nh
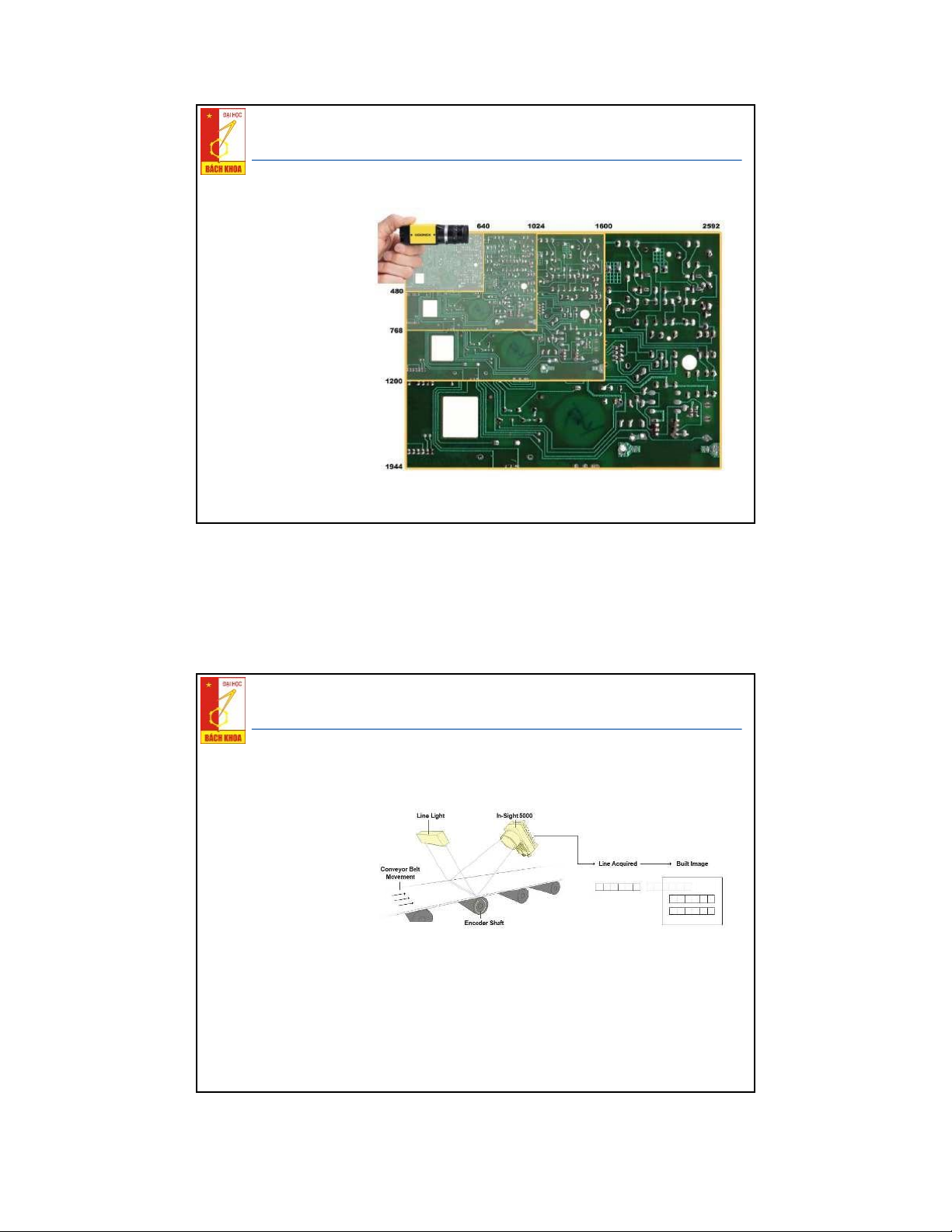
• Hệ thống xử lý ảnh 2 chiều: Các camera th ự c hi ệ n quét di ệ n tích b ằ ng vi ệ c ch ụ p ả nh nhanh 2D ở các độ phân gi ả i khác nhau
2 D vision systems can produce images with different resolutions 31
Phân lo ạ ih ệ th ố ng x ử lý ả nh
• Hệ thống xử lý ảnh 2 chiều: Another type of 2D machine vision–line scan–builds a 2D image line by line
Line scan techniques build the 2D image one line at a time.
Camera s ẽ ch ụ p t ừ ng ả nh 1D (r ộ ng 1 pixel) liên t ụ c d ọ c theo
chi ề u th ứ 2 . Ả nh 2D đượ c t ạ o nên b ằ ng cách ghép các ả nh 1D. 32
Phân lo ạ i h ệ th ố ng x ử lý ả nh
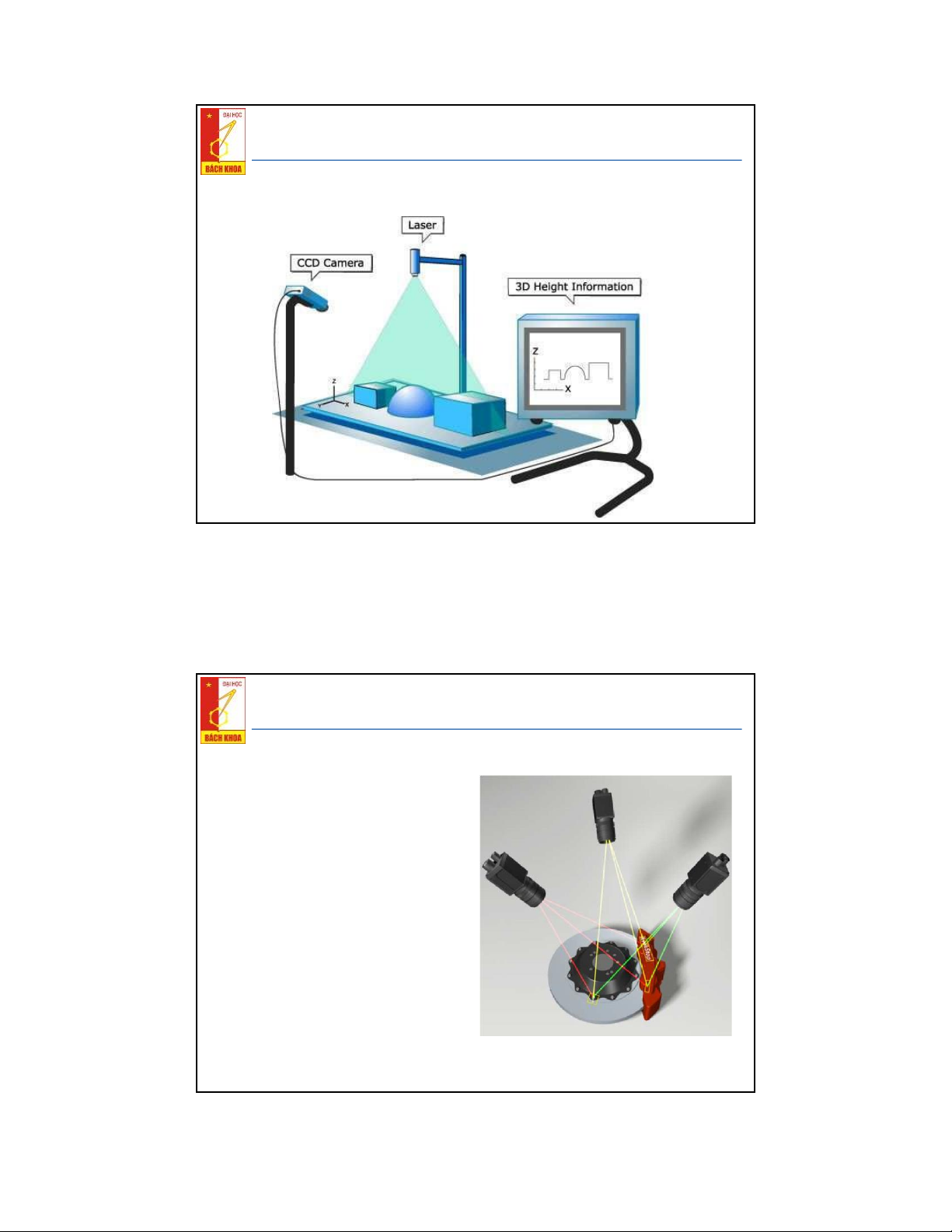
• Hệ thống xử lý ảnh 3 chiều: K ế t h ợ p camera 2D (x-y: pixel) và
máy quét tia laser 1D (z: mm) t ạ o
nên ả nh 3D c ủ a v ậ t th ể 33
Phân lo ạ ih ệ th ố ng x ử lý ả nh
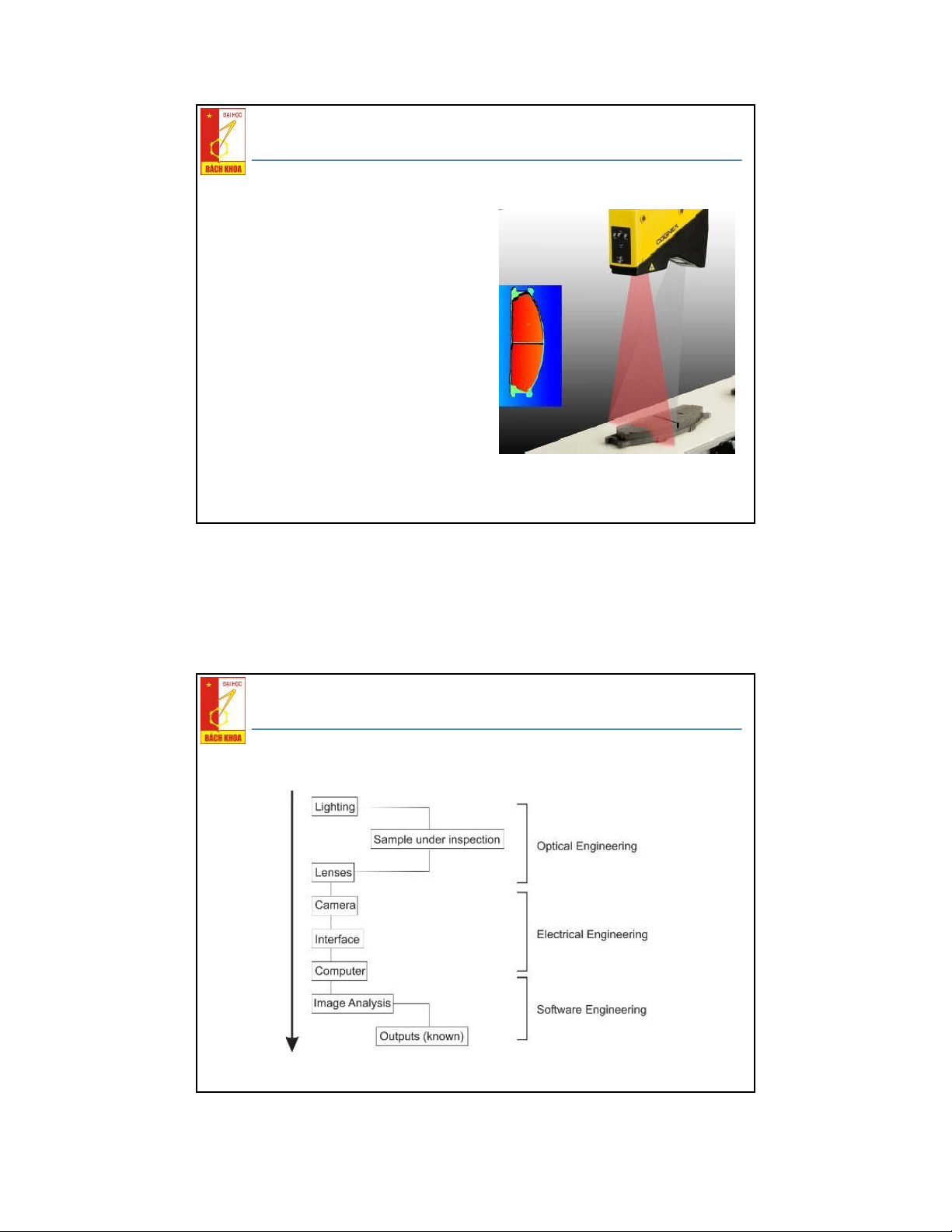
• Hệ thống xử lý ảnh 3 chiều:
H ệ th ố ng th ị giác máy 3D th ườ ng
bao g ồ m nhi ề u camera ho ặ c m ộ t
hay nhi ề u c ả m bi ế n laser d ị ch chuy ể n
H ệ th ố ng th ị giác nhi ề u camera D t
3 rong các ứ ng d ụ ng d ẫ n
h ướ ng robot cung c ấ p cho robot
thông tin đị nh h ướ ng
Các h ệ th ố ng này liên quan đế n
nhi ề u camera (>2) đượ c g ắ n ở
các v ị trí khác nhau và
“triangulation” trên m ộ t v ị trí m ụ c
tiêu trong không gian 3-D (theo
nguyên lý tam giác l ượ ng để xác
đị nh v ị trí 1 đ i ể m trong không
3 D vision systems typically employ multiple gian 3D) cameras 34
Phân lo ạ ih ệ th ố ng x ử lý ả nh
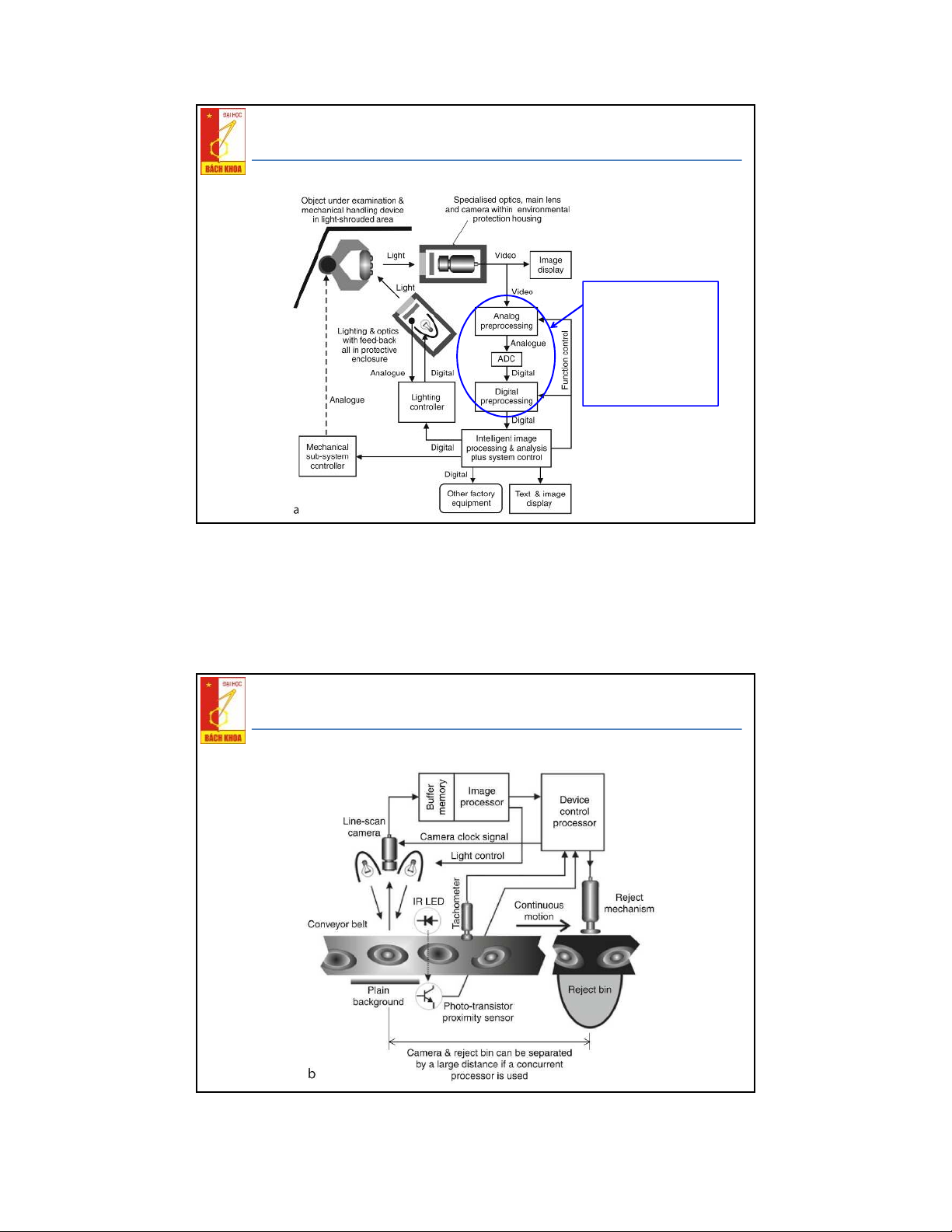
• Hệ thống xử lý ảnh 3 chiều:
Các ứ ng d ụ ng c ả m bi ế n d ị ch
chuy ể n laser 3D th ườ ng bao
g ồ m đ ánh giá b ề m ặ t và đ o kh ố i
l ượ ng , t ạ o ra các k ế t qu ả 3D v ớ i
ít nh ấ t là m ộ t camera đơ n l ẻ .
“B ả n đồ chi ề u cao” đượ c t ạ o ra
t ừ s ự d ị ch chuy ể n v ị trí t ươ ng đố i
c ủ a laser ph ả n chi ế u trên m ộ t v ậ t th ể
Đố i t ượ ng ho ặ c camera ph ả i
đượ c di chuy ể n để quét toàn b ộ
s ả n ph ẩ m t ươ ng t ự nh ư quét line 3D i
nspection system using a single camera 35 Các bướ ơ ả ử ả
c c b n trong x lý nh
• Quá trình xử lý thông tin: 36 Các bướ ơ ả ử ả
c c b n trong x lý nh
• Sơđồtổngthểcủahệthốngxửlýảnh: Đ i ề uch ỉ nhcác thôngs ố c ủ a camera để choch ấ t
l ượ ng ả nht ố tnh ấ t: exposed time, độ phângi ả i(8, 12, 16 bits),… 37 Các bướ ơ ả ử ả
c c b n trong x lý nh
• Hệ thống tự động kiểm tra chất lượng điển hình: 38 Các bướ ơ ả ử ả
c c b n trong x lý nh
Trình tự các bước trong xử lý ảnh 39 Các bướ ơ ả ử ả
c c b n trong x lý nh
• Phần thu nhận ảnh ( Image Acquisition ) :
- Ảnh có thể nhận qua camera màu hoặc đen trắng (tương tự) .
- Camera thường dùng là loại quét dòng ; ảnh tạo ra có dạng hai
chiều . Chất lượng một ảnh thu nhận được phụ thuộc vào thiết
bị thu , vào môi trường (ánh sáng, phong cảnh) . 40
Tài liệu liên quan:
-

Câu hỏi ôn tập môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
204 102 -
Bài giảng thực hành lắp đặt xe tự hành môn Nhập môn Cơ điện tử CTTT | Trường Đại học Bách Khoa Hà Nội
107 54 -

Đạo hàm và tích phân | Bài giảng môn Phương pháp tính và matlab CTTT | Đại học Bách khoa hà nội
223 112 -

Số gần đúng và sai số | Bài giảng môn Phương pháp tính và matlab CTTT | Đại học Bách khoa hà nội
238 119