Bài tập lớn môn Điện tử số | Học viện Công Nghệ Bưu Chính Viễn Thông
Bộ đếm (Counter) là mạch logic tuần tự dùng để đếm số xung clock đầu vào. Có nhiều loại bộ đếm: đếm tiến, đếm lùi, đồng bộ, không đồng bộ và theo MOD (số trạng thái đếm được). Tài liệu được sưu tầm gồm 8 trang, giúp các bạn ôn luyện và phục vụ cho việc học tập, đạt kết quả tốt. Mời các bạn đón xem!
Môn: Điện tử số 15 tài liệu
Trường: Học viện Công Nghệ Bưu Chính Viễn Thông 1.8 K tài liệu
Tác giả:

Preview text:
lOMoAR cPSD| 58457166
HỌC VIỆN CÔNG NGHỆ BƯU CHÍNH VIỄN THÔNG
MÔN : ĐIỆN TỬ SỐ NHÓM MÔN HỌC : 03
GV : Nguyễn Thế Vĩnh Nhóm BT : 01
Thành viên : 1. Nguyễn Văn Lương – B23DCDT166 2. Tạ Phúc Huân - 3.
Nguyễn Công Lâm - B23DCDT155 4.
Đào Duy Hưng - B23DCDT111 lOMoAR cPSD| 58457166
THIẾT KẾ BỘ ĐẾM KHÔNG ĐỒNG BỘ MOD-11
1. Cơ sở lý thuyết
Bộ đếm (Counter) là mạch logic tuần tự dùng để đếm số xung clock đầu vào. Có nhiều loại bộ đếm:
đếm tiến, đếm lùi, đồng bộ, không đồng bộ và theo MOD (số trạng thái đếm được).
2. JK là bộ như thế nào?
JK Flip-Flop là một phần tử nhớ (mạch logic tuần tự) có 2 đầu vào J, K và 1 xung C. Đầu ra Q phụ
thuộc vào J, K và xung C theo bảng: J K Q Giải thích 0 0 Giữ nguyên Không đổi trạng thái 0 1 0 Xóa trạng thái 1 0 1 Thiết lập trạng thái 1 1 Đảo bit Đảo trạng thái Q
=> JK rất thích hợp cho bộ đếm vì có thể đảo bit dễ dàng khi gán J = K = 1.
3. Bảng trạng thái
Với bộ đếm MOD 11 cần đếm từ 0 đến 10 → có 11 trạng thái → cần ít nhất 4 bit nhị phân (vì 2 = 16 >⁴ 11). Tạo bảng như sau: STT Q₃ Q₂ Q₁ Q₀ 0 0 0 0 0 1 0 0 0 1 2 0 0 1 0 3 0 0 1 1 4 0 1 0 0 5 0 1 0 1 6 0 1 1 0 7 0 1 1 1 8 1 0 0 0 9 1 0 0 1 10 1 0 1 0 Reset 1 0 1 1 → về 0000 lOMoAR cPSD| 58457166 4. Đếm MOD 11
MOD 11 tức là bộ đếm sẽ đếm 11 trạng thái từ 0 đến 10 (tương đương nhị phân từ 0000 đến 1010), rồi quay lại 0000.
MOD = số lượng trạng thái đếm được trước khi reset.
5. Giải thích nguyên lý hoạt động
Dùng 4 tri-gơ JK để tạo ra 4 bit Q , Q , Q , Q .₀ ₁ ₂ ₃
Đặt J = K = 1 để tri-gơ hoạt động ở chế độ Toggle (tức là tự động thay đổi trạng thái mỗi lần có xung kích).
Các tri-gơ được mắc nối tiếp nhau theo kiểu không đồng bộ:
• Tri-gơ T₀ (tạo ra Q ) nhận xung clock chính từ bên ngoài.₀
• Tri-gơ T₁ (tạo ra Q ) nhận xung từ đầu ra Q .₁ ₀
• Tri-gơ T₂ (Q ) nhận xung từ Q .₂ ₁
• Tri-gơ T₃ (Q ) nhận xung từ Q .₃ ₂
Tri-gơ đầu tiên (Q ) thay đổi trạng thái ở mỗi cạnh xuống của xung clock.₀
Mỗi tri-gơ tiếp theo chỉ thay đổi trạng thái khi tri-gơ trước đó chuyển từ 1 → 0, đúng với nguyên lý của
bộ đếm không đồng bộ.
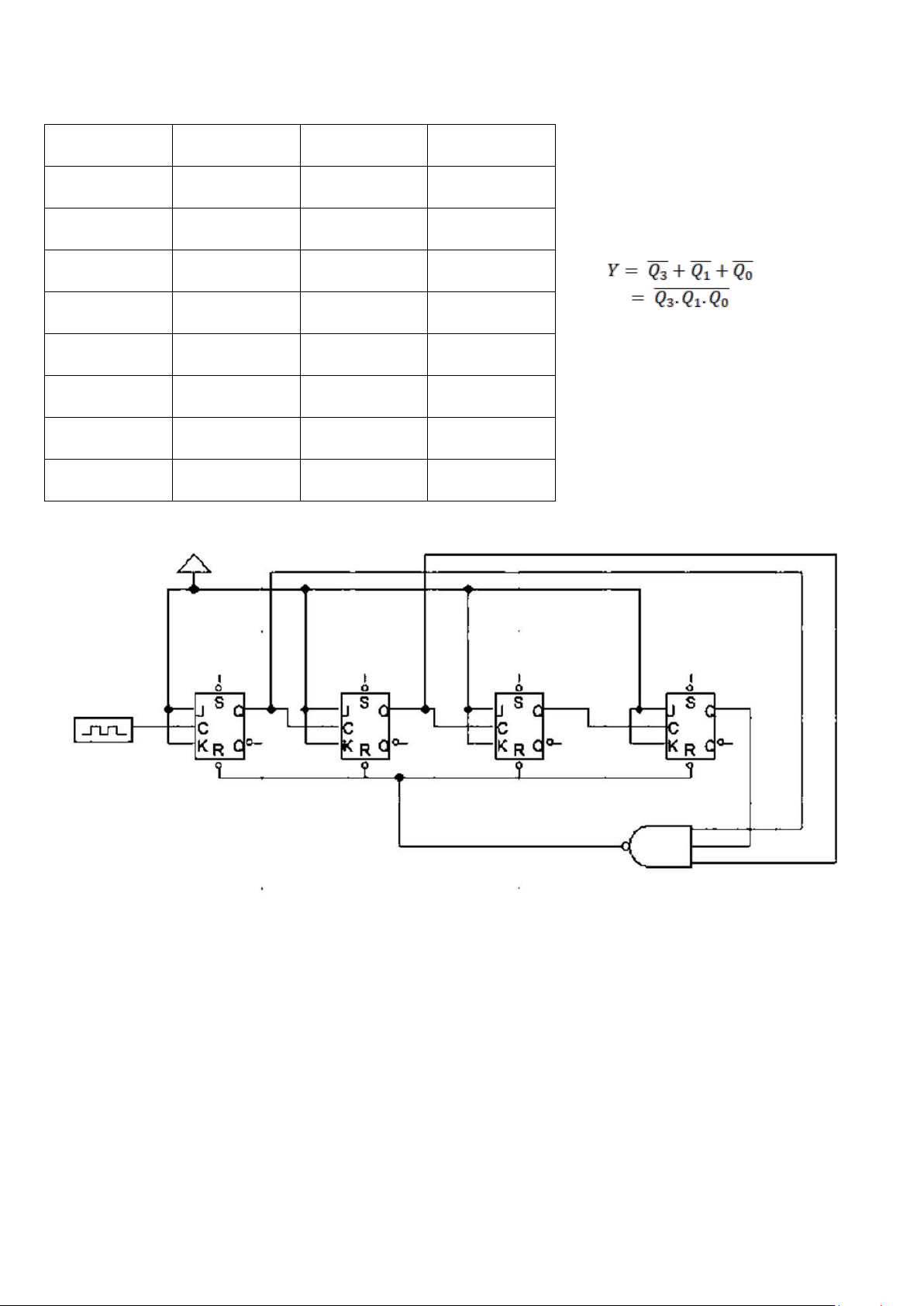
Khi mạch đếm đến trạng thái 1010 (số 10), nếu tiếp tục đếm sẽ thành 1011 (số 11). Tại trạng thái
này, đầu ra Q = 1, Q = 1 và Q = 1. Để giới hạn số đếm ở MOD-11 (tức là đếm từ 0 đến 10), ta cần ₃ ₁
₀ thiết kế mạch reset tự động khi trạng thái 1011 xuất hiện. Trong quá trình mô phỏng, việc sử
dụng cổng NAND để tạo tín hiệu reset là cần thiết nhằm đảm bảo tri-gơ được xóa đúng lúc. Điều này
xuất phát từ thực tế rằng các tri-gơ thường có chân xóa (CLR) hoạt động ở mức thấp, tức là khi tín hiệu
reset = 0 thì tri-gơ sẽ trở về 0. Cổng NAND sẽ cho đầu ra bằng 0 khi tất cả các đầu vào đều bằng 1 –
đúng với trạng thái cần reset (Q ·Q ·Q = 1). ₃ ₁ ₀
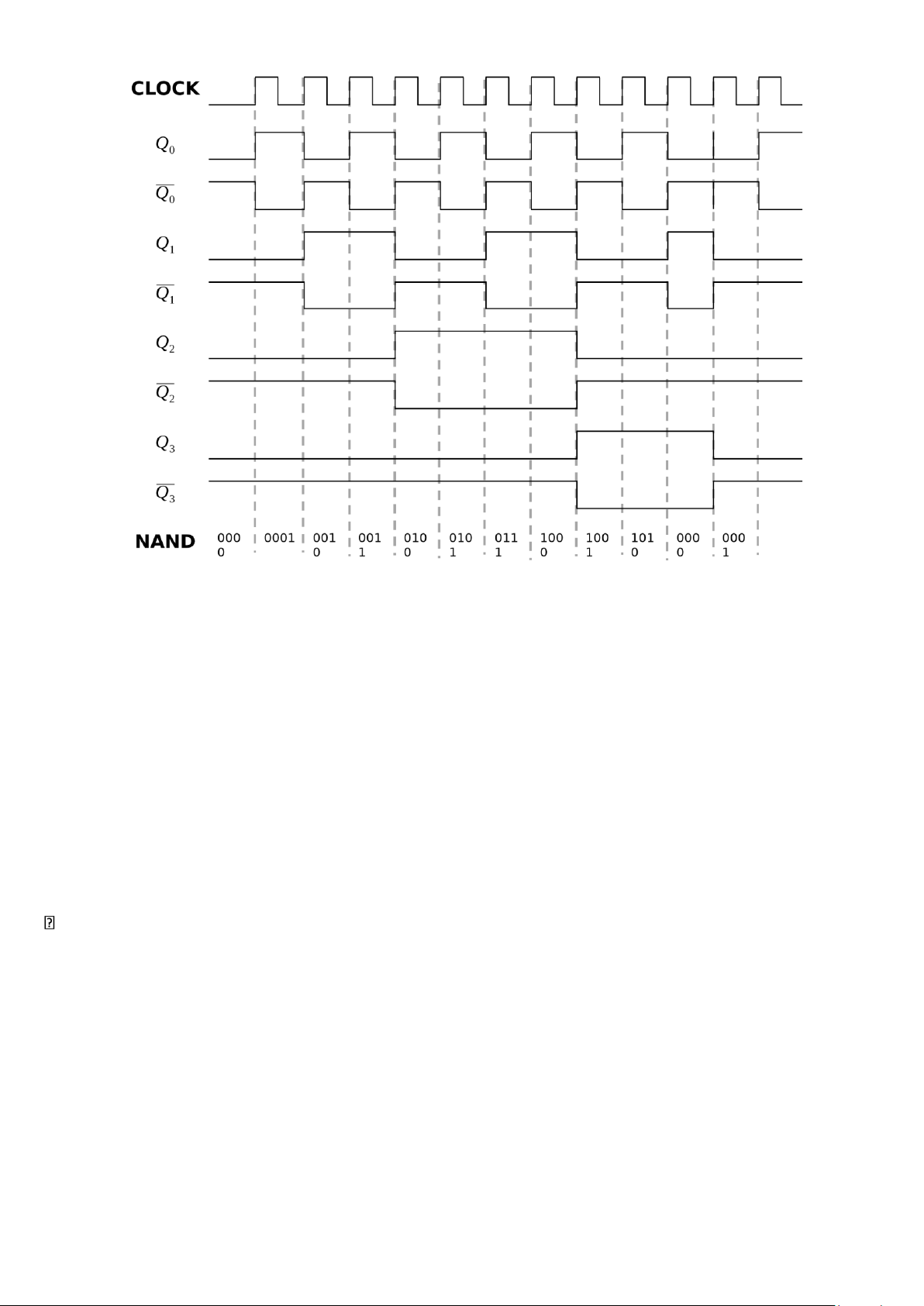
Nhờ vậy, mạch được reset chính xác và nhanh chóng, giúp bộ đếm luôn hoạt động đúng chu kỳ từ
0000 đến 1010. Việc dùng cổng NAND vừa phù hợp về mặt logic, vừa đảm bảo tính ổn định và đúng
yêu cầu trong mô phỏng mạch số. lOMoAR cPSD| 58457166
6. Bảng tóm tắt và giản đồ xung Q3 Q1 Q0 Y(reset) 0 0 0 1 0 0 1 1 0 1 0 1 0 1 1 1 1 0 0 1 1 0 1 1 1 1 0 1 1 1 1 0
• Hình minh họa về bộ đếm ( sử dụng logic work ) lOMoAR cPSD| 58457166 7.Kết luận
Qua quá trình tìm hiểu và mô phỏng, nhóm đã hiểu được cách thiết kế thành công bộ đếm không
đồng bộ MOD-11 sử dụng 4 tri-gơ JK. Cụ thể, nhóm nắm được cách:
• Cấu hình tri-gơ JK ở chế độ Toggle bằng cách đặt J = K = 1 để tạo ra sự thay đổi trạng thái tự động theo xung clock.
• Mắc nối tiếp các tri-gơ để tạo ra chuỗi đếm nhị phân không đồng bộ, trong đó mỗi tri-gơ sau
nhận xung từ đầu ra của tri-gơ trước.
• Xác định điều kiện reset khi mạch đạt đến trạng thái giới hạn (MOD-11), và thiết kế mạch phát
hiện trạng thái cần reset.
• Sử dụng cổng NAND để tạo tín hiệu reset đúng thời điểm, đảm bảo các trigơ được đưa về 0
chính xác khi đạt trạng thái mong muốn.
Qua quá trình tìm hiểu, thiết kế và mô phỏng bộ đếm không đồng bộ MOD-11 sử dụng 4 tri-gơ JK,
nhóm đã nắm vững nguyên lý hoạt động của bộ đếm không đồng bộ, cách cấu hình tri-gơ JK ở chế
độ Toggle và phương pháp thiết lập điều kiện reset phù hợp để giới hạn chu kỳ đếm ở MOD-11.
Việc sử dụng phần mềm mô phỏng Proteus và Logic Work đã hỗ trợ nhóm kiểm tra hoạt động của
mạch một cách trực quan và hiệu quả, từ đó củng cố kiến thức lý thuyết và kỹ năng thực hành lOMoAR cPSD| 58457166
mạch logic số. Bài tập lớn không chỉ giúp nhóm hiểu sâu hơn về các khối logic cơ bản mà còn rèn
luyện khả năng tư duy logic, làm việc nhóm và phân tích – xử lý vấn đề trong thiết kế mạch điện tử.
Giới thiệu phần mềm Proteus và Logic work
Logic Work là một phần mềm mô phỏng mạch logic số. Nó thường được dùng trong giảng dạy
và học tập để giúp sinh viên, học sinh hoặc kỹ sư thiết kế, kiểm tra và hiểu cách hoạt động của các
mạch logic cơ bản đến nâng cao mà không cần phải lắp ráp phần cứng thực tế.
Proteus là một phần mềm mô phỏng mạch điện tử và vi điều khiển rất phổ biến trong lĩnh vực
kỹ thuật điện – điện tử và tự động hóa. Đây là công cụ mạnh mẽ hỗ trợ thiết kế, mô phỏng và kiểm
tra mạch điện trước khi tiến hành lắp ráp thực tế.
Trong bài này với Proteus, bạn có thể mô phỏng quá trình bằng cách sử dụng các tri-gơ JK kết
hợp với mạch logic để tạo ra bộ đếm không đồng bộ.
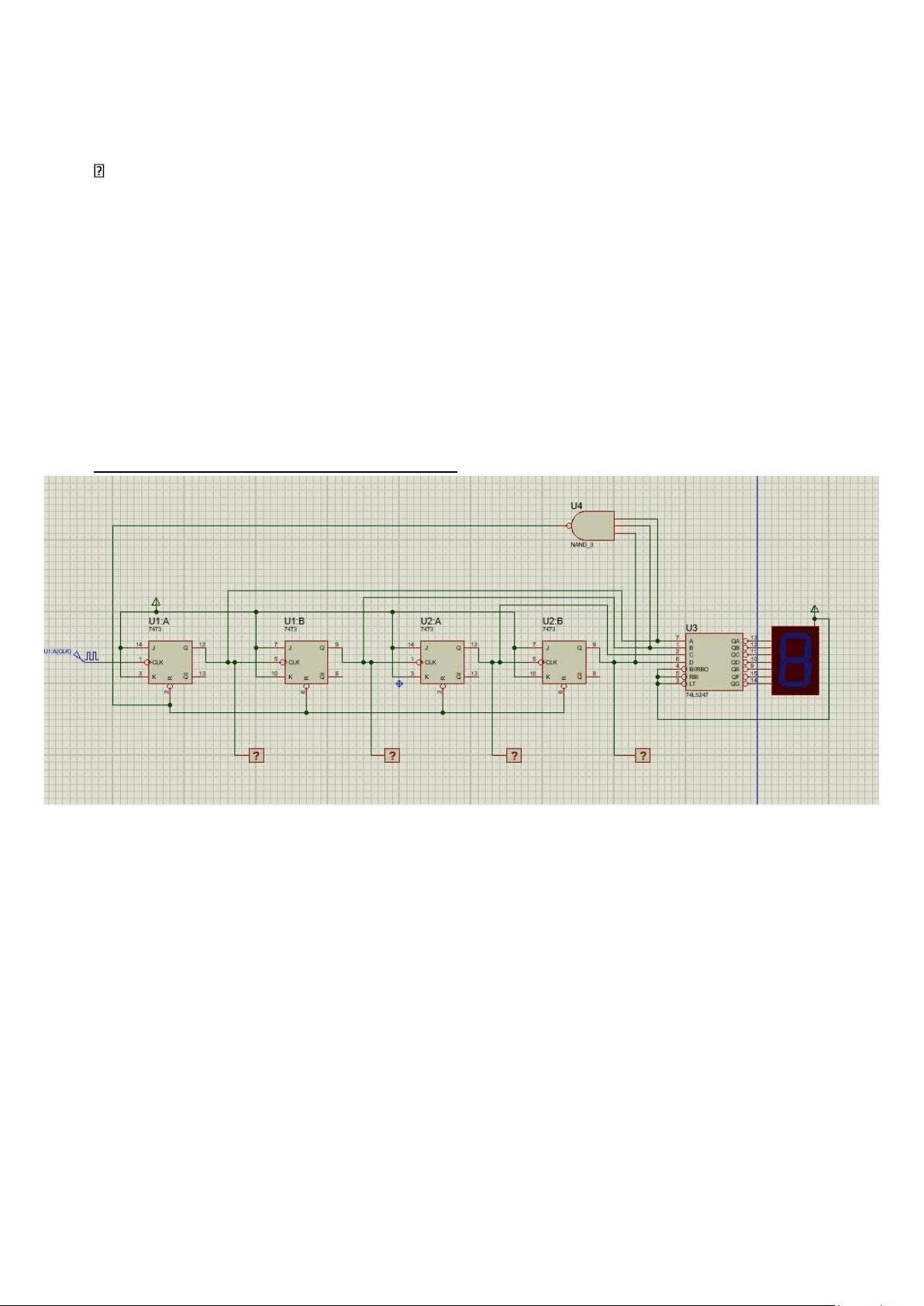
Hình minh họa về bộ đếm ( sử dụng Proteus)
Chúng ta sẽ sử dụng 1 bộ giải mã led 7 đoạn để có thể theo rõi kết quả 1 cách trực quan hơn và có thể so sánh
với bit bên dưới xem có đúng với giải mã không (đọc bit từ trái sang phải ở trên hình) lOMoAR cPSD| 58457166
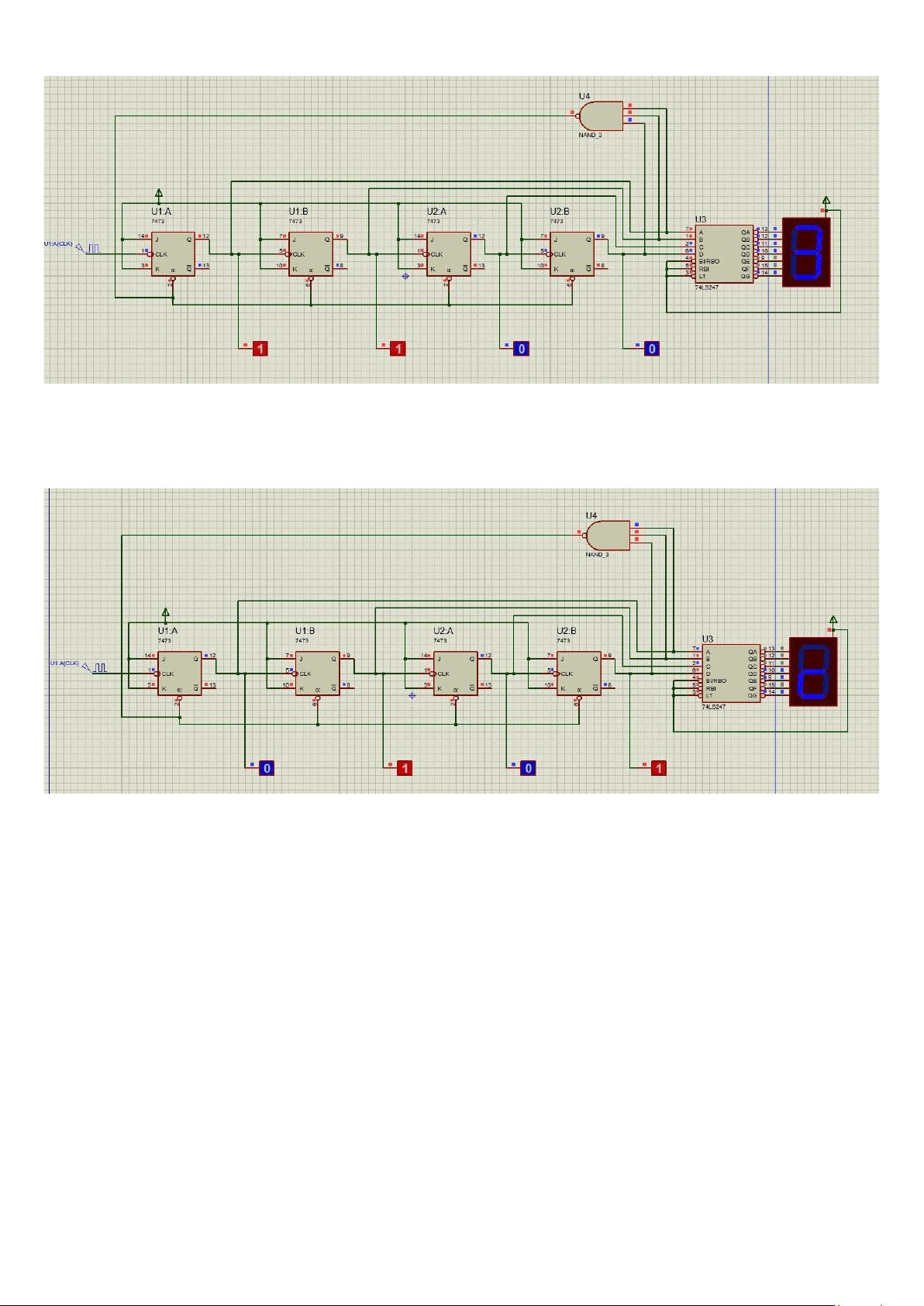
Như ta có thể thấy với Led 7 đoạn đang hiển thị số 3 tương ứng với bit 0011 và kết quả cho ra đúng với lý thuyết bên trên
Tương tự như vậy ta cũng có thể kiểm tra đếm đến số 10
(Hình minh họa hiển thị số 10)
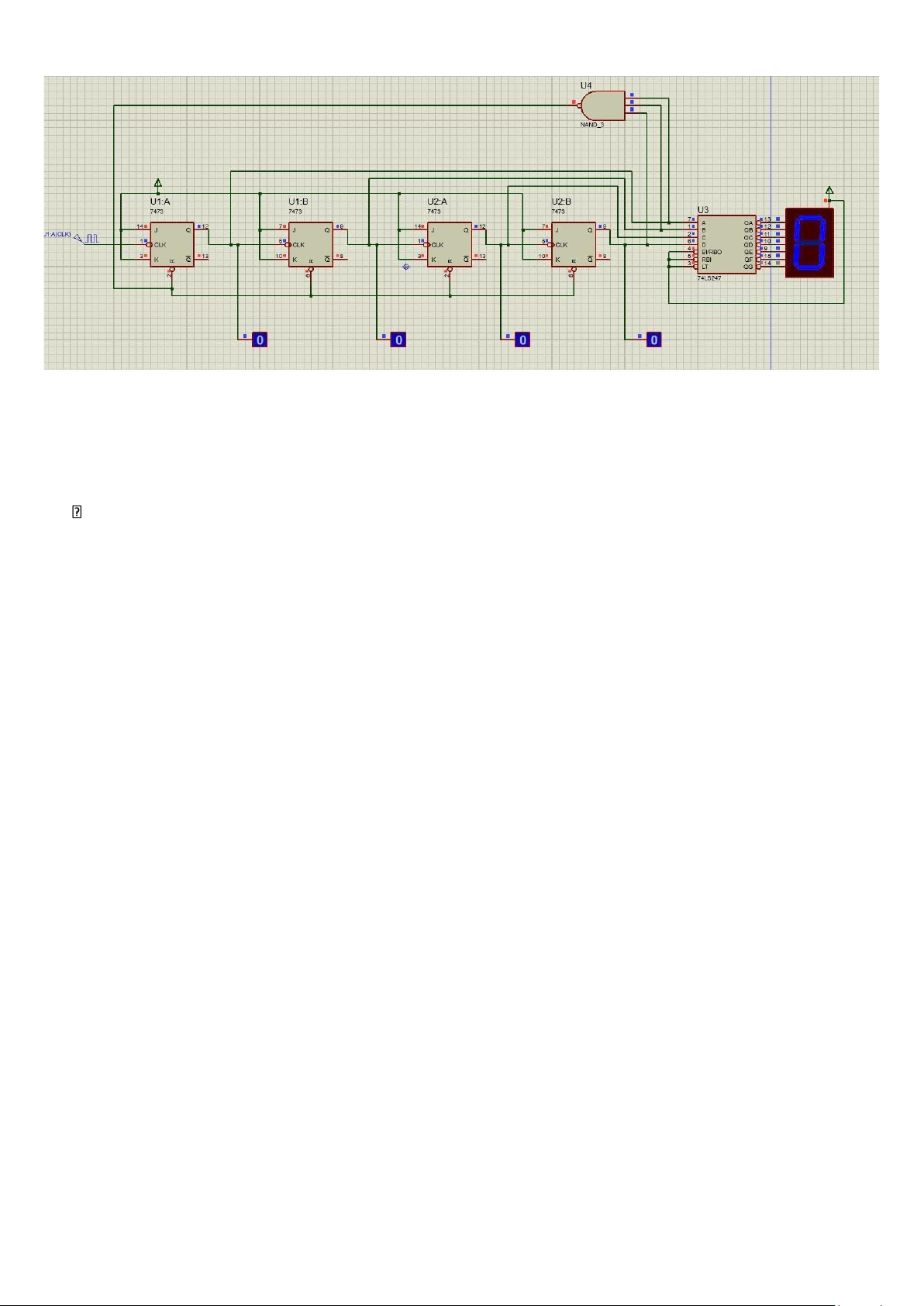
Sau khi đếm đến 10, bộ đếm sẽ reset thông qua cổng Nand và khi cổng Nand về mức 0 vì quá trình diễn ra rất
nhanh nên không thể thấy mức 0 của đầu ra Nand ở mô phỏng và trả về kết quả 0 luôn
Hình ảnh sau khi reset bộ đếm lOMoAR cPSD| 58457166
Qua đó ta có thể thấy bộ đếm hoạt động đúng theo lý thuyết Lời kết :
• Qua bài tập trên, ta có thể hiểu rõ được cách hoạt động của 1 JK-FF và ứng dụng của JK-FF trong bộ đếm mode 11
• Đồng thời cũng có thể sử dụng được 1 phần mềm mô phỏng mạch điện phổ biến và có thể ứng
dụng vào cho các bài tiếp theo
Tài liệu liên quan:
-

Bài Giảng Điện Tử Số - HĐH 2013: Các Cửa Logic & Phân Tích Mạch
35 18 -

Báo cáo Thiết kế 1 khối ALU 4 bit thực hiện các phép tính toán học và logic môn Điện tử số | Học viện Công Nghệ Bưu Chính Viễn Thông
186 93 -

Đề cương ôn tập chi tiết môn Điện tử số | Học viện Công Nghệ Bưu Chính Viễn Thông
146 73 -

Báo cáo Bài tập lớn môn Điện tử số | Học viện Công Nghệ Bưu Chính Viễn Thông
124 62