Bài tập lớn môn Hệ thống truyền động Servo đề tài "Mô phỏng động cơ DC Servo Motor"
Bài tập lớn môn Hệ thống truyền động Servo đề tài "Mô phỏng động cơ DC Servo Motor" của Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh với những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã học vào thực tiễn cuộc sống. Mời bạn đọc đón xem!
Môn: Mechatronic Servo System Control (SERV334029) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:












Preview text:
lOMoARcPSD| 37054152
B Ộ GIÁO D ỤC VÀ ĐÀO TẠ O
TRƯỜNG ĐẠ I H ỌC SƯ PHẠ M K Ỹ THU Ậ T THÀNH PH Ố H Ồ CHÍ MINH
KHOA CƠ KHÍ CHẾ T Ạ O MÁY
BÀI T Ậ P L Ớ N : MÔ PH ỎNG ĐỘNG CƠ DC SERVO MOTOR
B Ộ MÔN : H Ệ TH Ố NG TRUY ỀN ĐỘ NG SERVO
GVHD : THS. VÕ LÂM CHƯƠNG NHÓM 15 Sinh viên th ự c hi ệ n STT H ọ và tên MSSV 1 Đỗ Phương Nam 211462 71 2 Nguy ễ n Thanh Nh ự t 21146287 3 Tr ần Đắ c Tân 21146312
TP.HCM, ngày 25 tháng 11 năm 2023 lOMoARcPSD| 37054152 MỤC LỤC
Đề bài ................................................................................................................................................. 2
Q1 ................................................................................................................................................... 2
Q2 ................................................................................................................................................... 3
1. Thông số của ộng cơ M4-2952(type A) ........................................................................................ 4
2. Mô phỏng iều khiển vị trí hệ servo một trục ................................................................................. 4
2.1. Điều kiện tốc ộ cao(High speed) ............................................................................................ 4
2.2. Điều khiển tốc ộ trung bình(Middle Speed) ........................................................................... 9
2.3. Điều khiển tốc ộ thấp(Low-Speed) ....................................................................................... 13
2.4. Kết luận ................................................................................................................................. 17
3. Mô phỏng iều khiển vận tốc và vị trí DC servo sử dụng thuật toán PID .................................... 17
3.1. Mô phỏng iều khiển vận tốc ................................................................................................. 17
3.2. Mô phỏng iều khiển vị trí ..................................................................................................... 22
3.3. Kết quả mô phỏng ................................................................................................................. 23 Đề bài Q1
Using DC servo motors in the catalogues according to No. of Group as follows: Group Series Brand 1/21 KB402 2/22 KB404 3/23 KB406 Sanyo Denki 4/24 KB506 5/25 KB511 6/26 MT-2240-A 7/27 MT-2240-B 8/28 MT-2250-A Baldor 9/28 MT-2250-B 10/30 MT-3353-D 11 MT-3358-B 12 M4-2950 13 M4-2950 lOMoARcPSD| 37054152 14 M4-2951 M4-295x 15 M4-2952 16 M4-2959 17 M4-4203 18 M4-4204 19 M4-4205 M4-420x 20 M4-4206
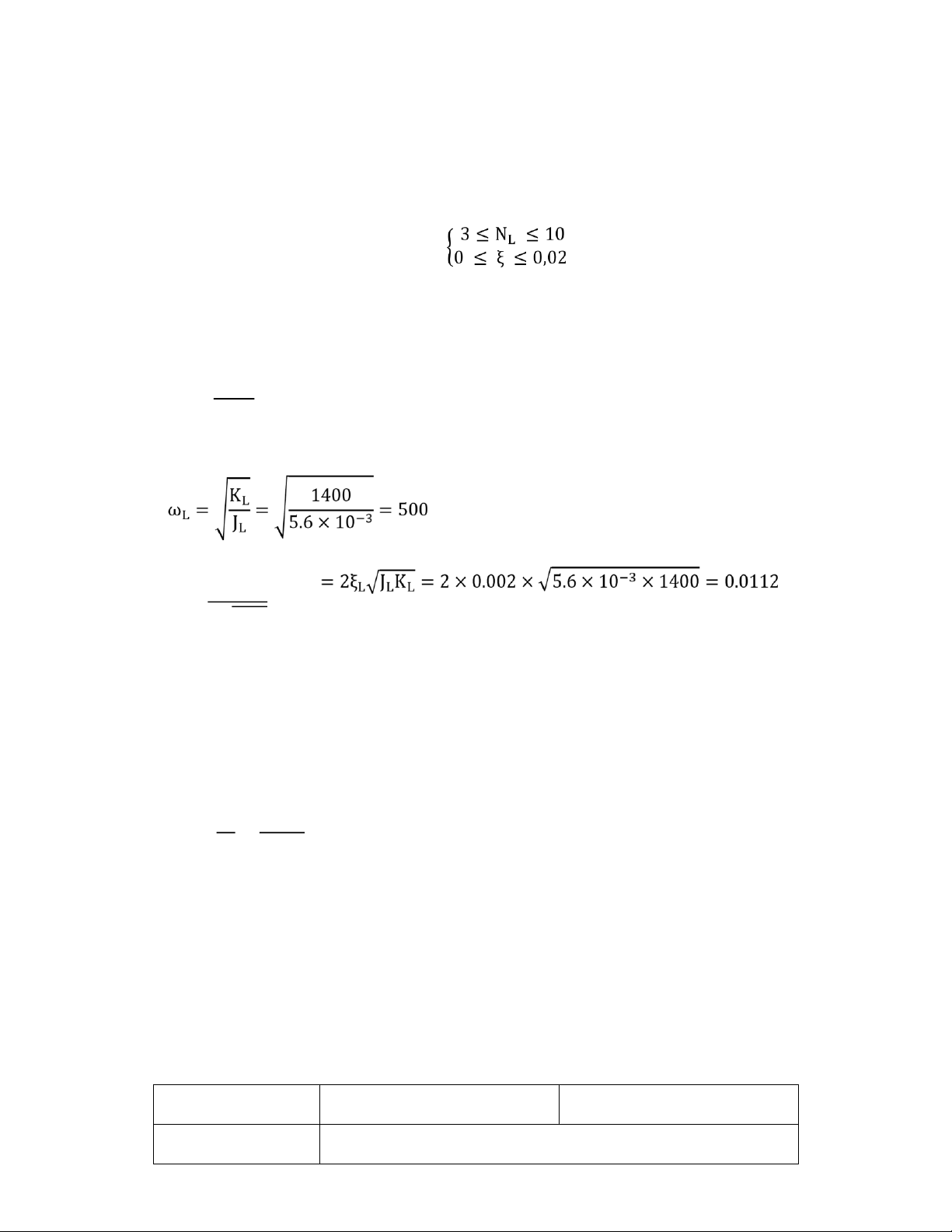
Each group has to choose the load parameters including soft-coupling stiffness (KL), inertia
moment (JL), and viscous damping (DL) to satisfy the condition: 3 ≤ 𝑁L ≤ 10 and 0 ≤ 𝜉 ≤ 0.02 (at
least 2 different loads in this range) Requirements:
1. Create a simulink block diagram for a single axis servo system
2. Calculate all necessary parameters including load parameters and control parameters
3. Simulate position responses at 3 different speed levels: - High speed - Middle speed - Low speed Q2
Each group uses the given motor in question 1. Write the PID algorithm using m-file of Matlab to
simulate to velocity and position control of the motor. The algorithm has to include the derivative
filter for D-term and anti-windup for I-term. Illustrate the effect of anti-windup in your result. lOMoARcPSD| 37054152
H nh 1.1. Th ng số động cơ
- Nhóm 15 chọn ộng M4-2952(A)
1. Thông số của ộng cơ M4-2952(type A)
- Từ datasheet ta có các thông số :
• Công suất : P = 0.895(kW)
• Tốc ộ ịnh mức : Nmax = 3000(rpm)
• Hằng số moment : KT = 0.361(Nm⁄A)
• Hằng số suất phản iện ộng(Back EMF Constant): 60
Ke = 37.8(V krpm⁄ ) = 37.8 × 10−3(V rpm⁄ ) = 37.8 × 10−3 × (Vs⁄rad) 2π = 0.361 (Vs⁄rad)
• Moment quán tính : JM = 0.0014(kgm2)
• Điện trở : R = 0.452(Ω)
• Điện cảm cuộn dây : L = 1.6(mH)
• Mmax = 27.1 => KL = 1400
2. Mô phỏng iều khiển vị trí hệ servo một trục
2.1.Điều kiện tốc ộ cao(High speed) -
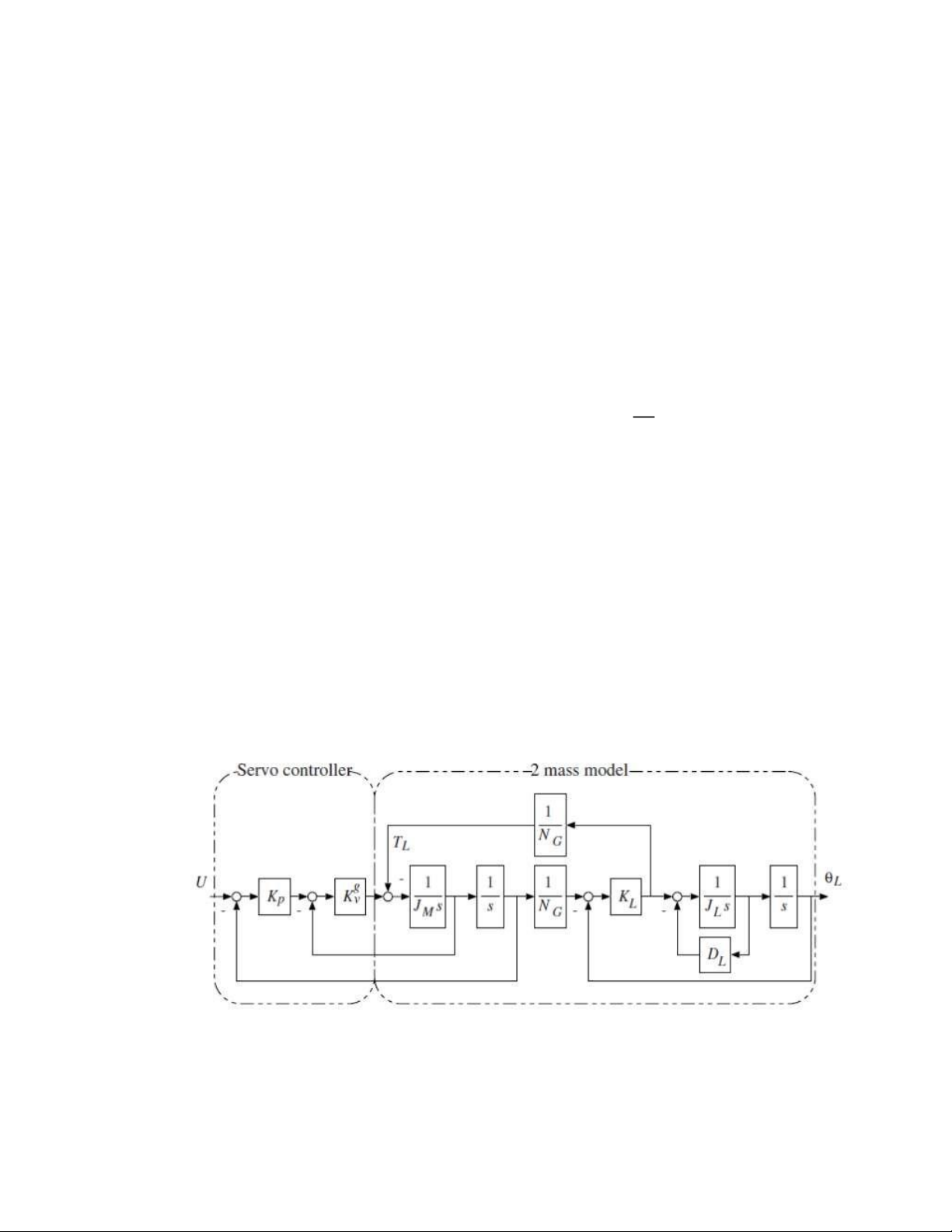
Sử dụng hệ servo bậc 4 ể iều khiển tốc ộ cao
Hnh 1. M hnh h ệ servo m ộ t tr ụ c b ậ c 4 Trong ó :
JM, JL − the inertial moment of motor and load lOMoARcPSD| 37054152 TM − moment of the moment NG − gear ratio
DL − the viscous fiction coefficient θ − the rotation angle
2.1.1. Tính toán thông số iều khiển :
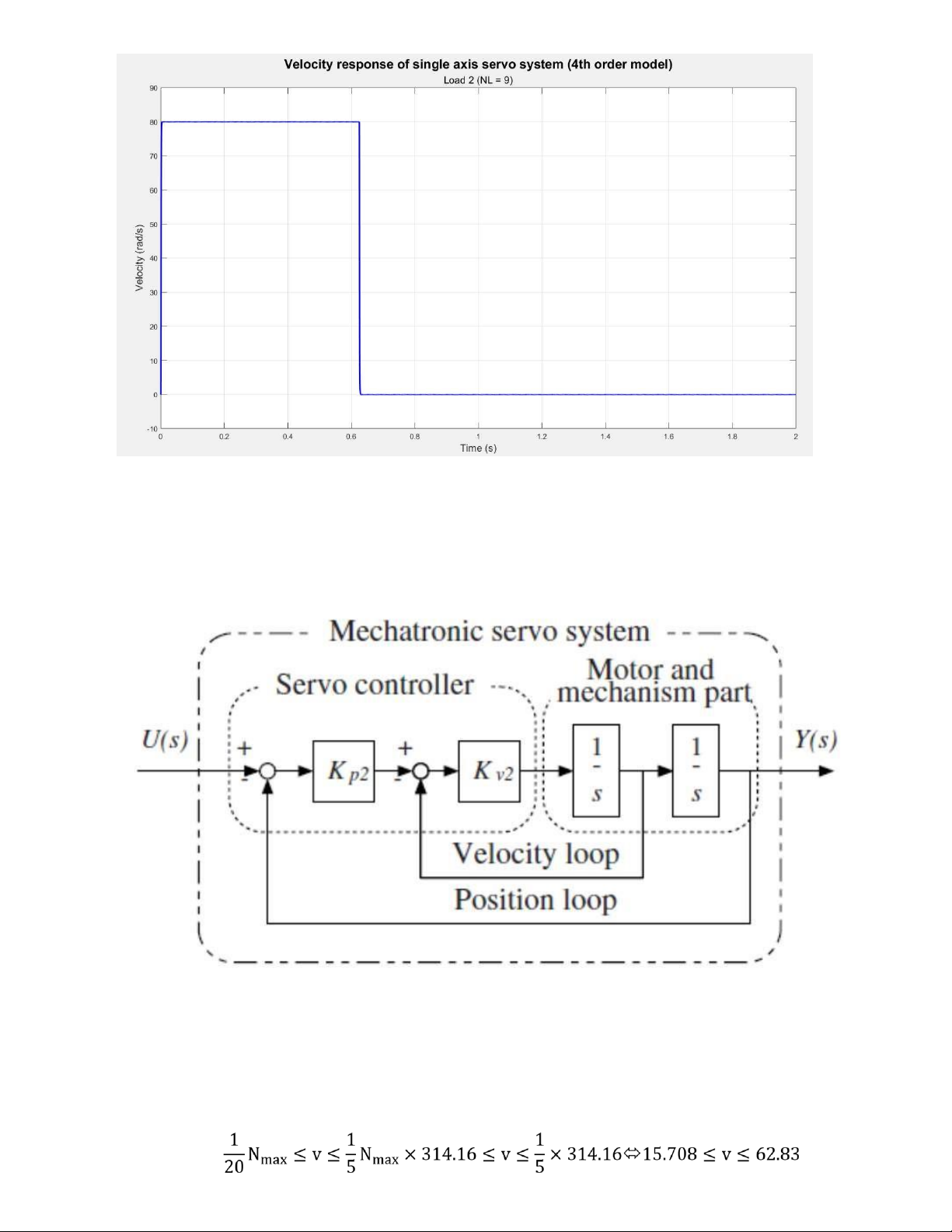
Ta có : Nmax = 3000(rpm) = 314.16(rad s⁄ ). Để iều khiển tốc ộ cao thì : 1 v > Nmax = × 314.16 = 62.83(rad s⁄ ) 5
→ Ta chọn v = 80(rad s⁄ )
Từ datasheet ộng cơ M4-2952(A) và ề bài, ta có thông số sau :
JM = 0.0014(kgm2); NG = 1; KL = 1400; cP = 0.24; cv = 0.82.
Để hệ servo áp ứng nhanh và không bị dao ộng thì: Chọn ξ = 0.002
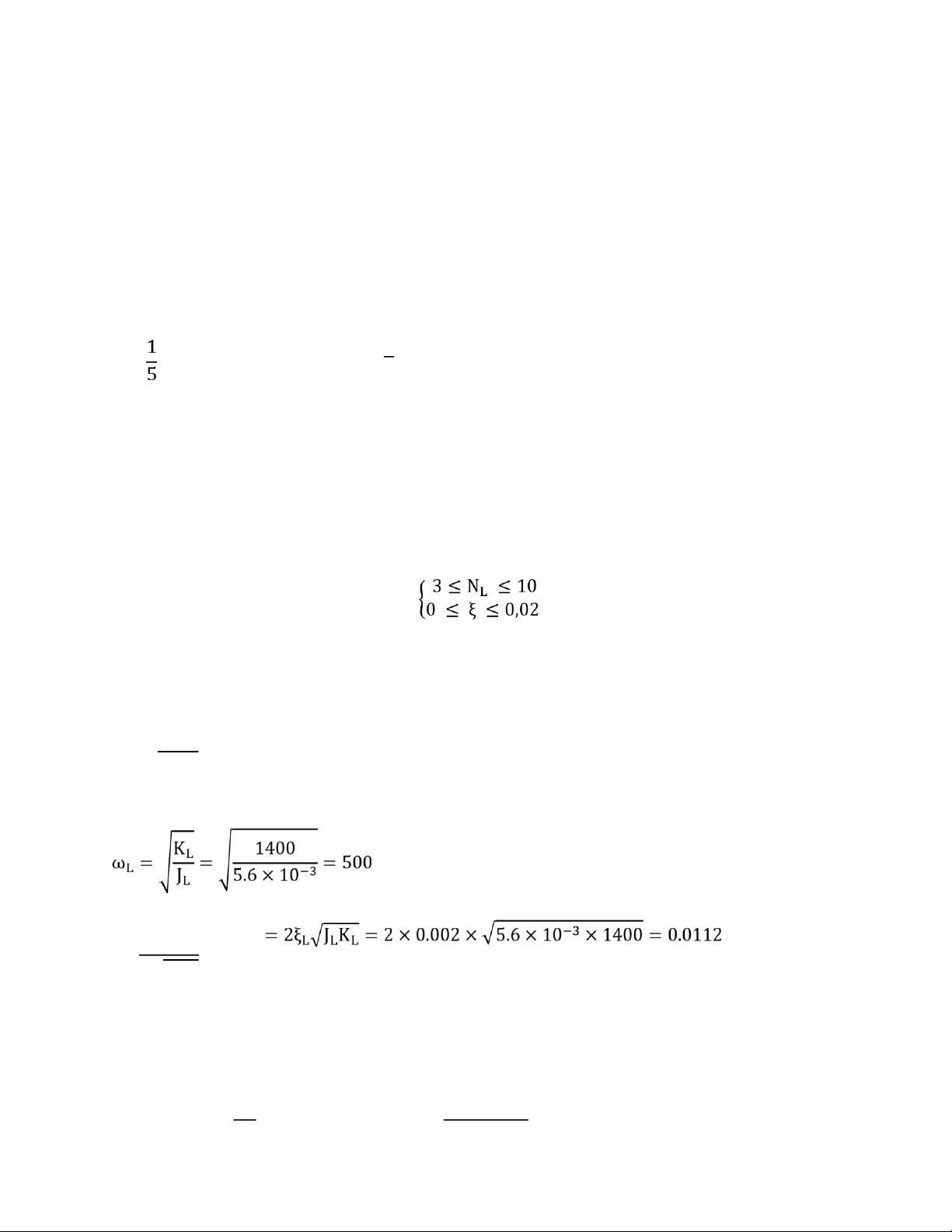
Với NL = 4, ta tính ược các thông số cần thiết : NL
= NJ2LJM JL = NLN2JM = 4 × 12 × 0.0014 = 5.6 × 10−3 G G DL ξL = DL 2√JLKL
Kp = cpωL = 0.24 × 500 = 120
Kv = cvωL = 0.82 × 500 = 410 Kgv = Kv (JM + N JL2) = 410 × (0.0014 + 5.6 ×1210−3) = 2.87 G lOMoARcPSD| 37054152
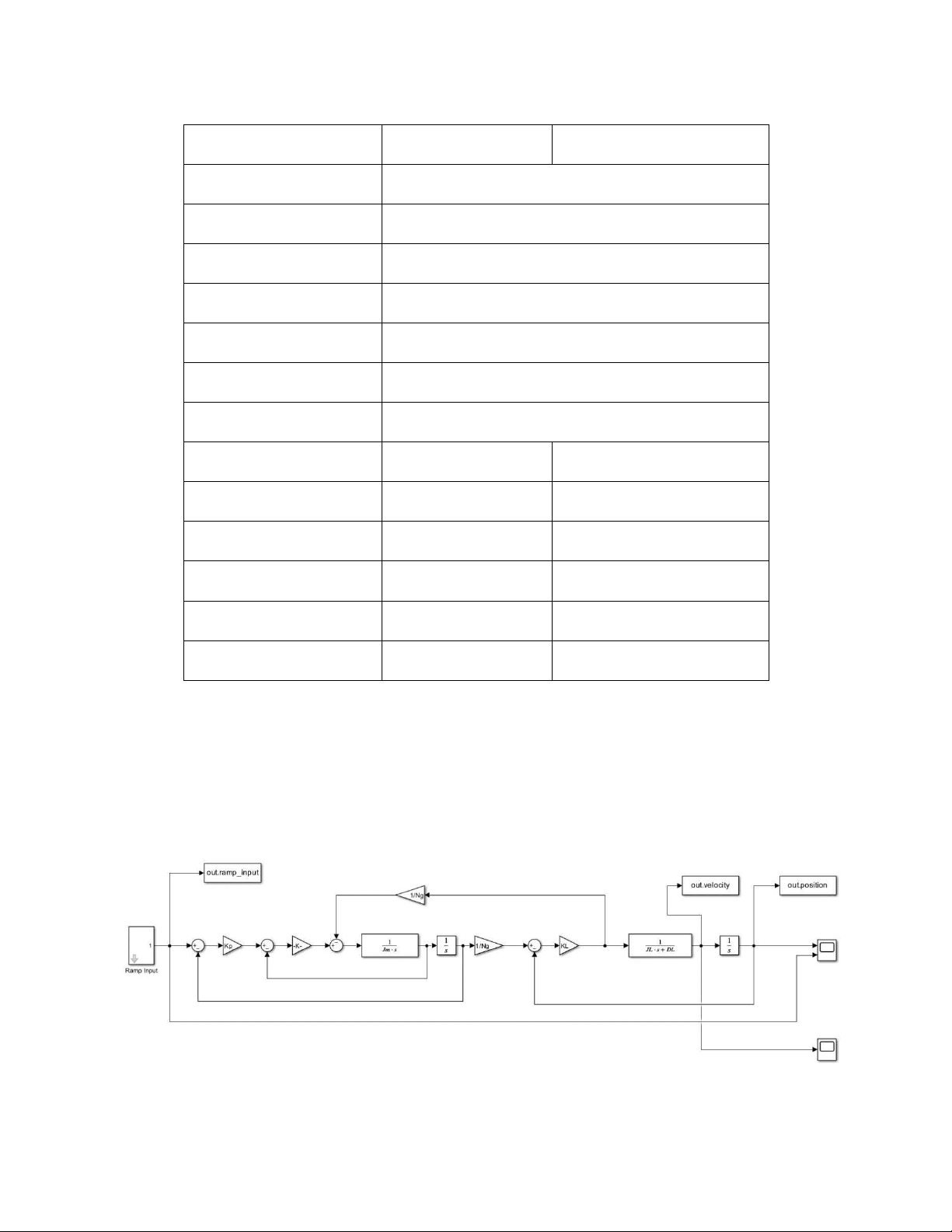
Tương tư với NL = 9. Các thông số iều khiển cần thiết ược tổng hợp trong bảng sau : Thông số cần thiết NL = 4 NL = 9 v(rad s⁄ ) 80 JM(kgm2) 0.0014 ξL 0.02 NG 1 KL 1400 cp 0.24 cv 0.82 JL 5.6 × 10−3 12.6 × 10−3 ωL 500 333.333 DL 0.0112 0.0168 Kp 120 80 Kv 410 273.333 Kgv 2.87 3.83
Bảng 2. Các thông số mô phỏng
2.1.2. Mô phỏng trên MATLAB
Ta xây dựng mô hình trong môi trường Simulink của MATLAB ể mô phỏng iều khiển vị trí hệ servo
một trục bậc 4 tốc ộ cao như sau :
Hnh 2. M ph ỏ ng h ệ servo m ộ t tr ụ c b ậ c 4 Trong ó :
Hàm Ramp input ược mô phỏng như hình : lOMoARcPSD| 37054152
Hình 3. Mô phỏng ngõ vào hàm dốc
Với NL = 4 và các thông số ở bảng 2. Thông số mô phỏng, ta ược các kết quả như sau :
Hình 4. Đáp ứng vị trí của hệ bậc 4(𝑁𝐿 = 4) lOMoARcPSD| 37054152
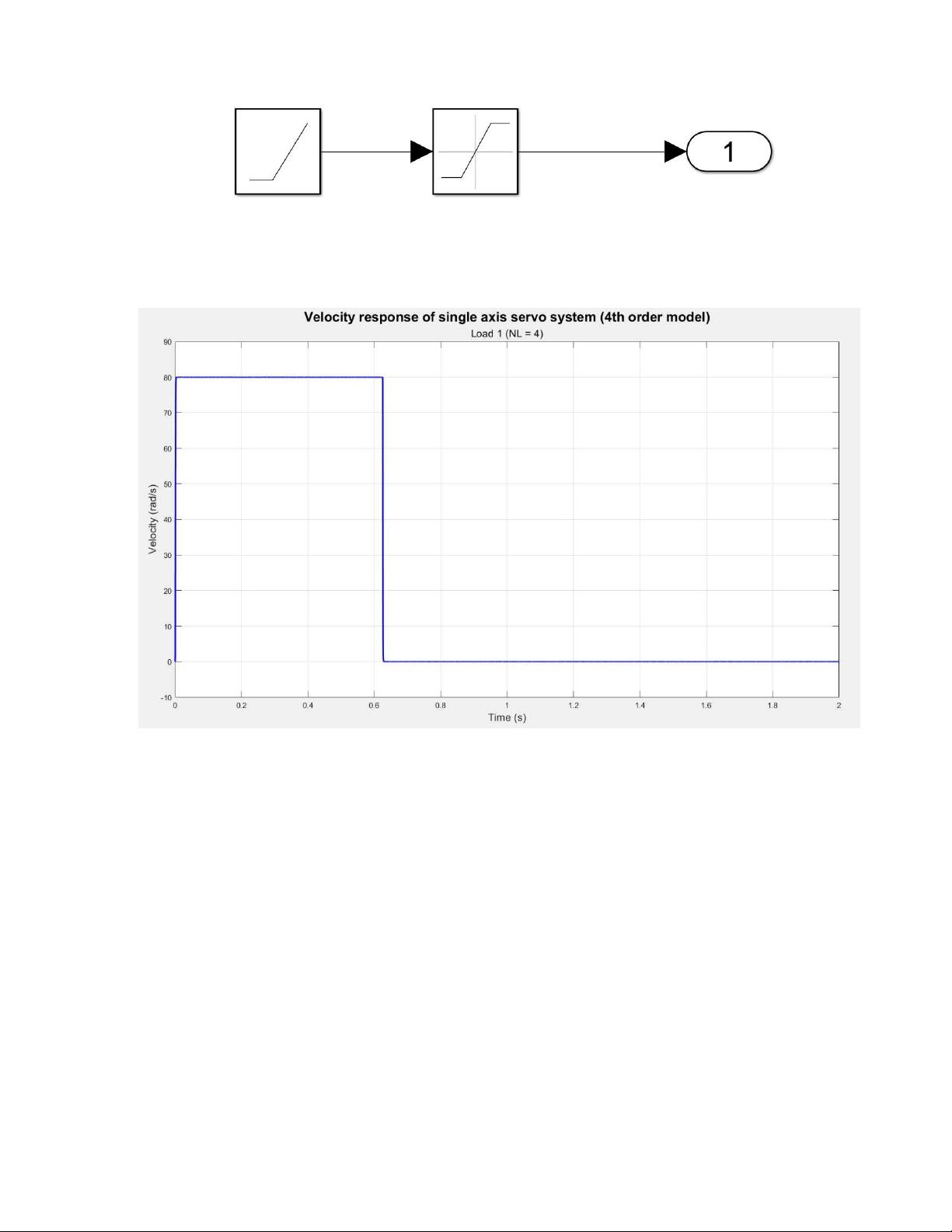
Hình 5. Đáp ứng vận tốc hệ bậc 4(𝑁𝐿 = 4)
Với NL = 9 và các thông số ở bảng 2. Thông số mô phỏng, ta ược các kết quả như sau :
Hình 6. Đáp ứng vị trí của hệ bậc 4(NL=9) lOMoARcPSD| 37054152
Hình 7. Đáp ứng vận tốc của hệ bậc 4(NL=9)
2.2.Điều khiển tốc ộ trung bình(Middle Speed) -
Sử dụng hệ servo bậc 2 ể iều khiển tốc ộ trung bình
Hình 8. Mô hình servo một trục bậc 2
2.2.1. Tính toán thông số iều khiển
Ta có : Nmax = 3000(rpm) = 314.16(rad s⁄ ). Để iều khiển tốc ộ trung bình thì : lOMoARcPSD| 37054152 → Chọn v = 40(rad s⁄ )
Từ datasheet ộng cơ M4-2952(A) và ề bài, ta có thông số sau :
JM = 0.0014(kgm2); NG = 1; KL = 1400; cP = 0.24; cv = 0.82.
Để hệ servo áp ứng nhanh và không bị dao ộng thì: Chọn ξ = 0.002
Với NL = 4, ta tính ược các thông số cần thiết : NL
= NJ2LJM JL = NLN2JM = 4 × 12 × 0.0014 = 5.6 × 10−3 G G DL ξL = DL
2√JLKL b0 = (1 + NL)cpcv = (1 + 4) × 0.24 × 0.82 = 0.984
b1 = (1 + NL)(cv + 2cpcvξL) + 2NLξL
= (1 + 4)(0.82 + 2 × 0.24 × 0.82 × 0.002 ) + 2 × 4 × 0.002 = 4.12 b0 0.984 cp2 = b1 = 4.12 = 0.24 cv2 = 4cp2 = 4 × 0.24 = 0.955
Kp2 = cp2ωL = 0.24 × 500 = 120
Kv2 = cv2ωL = 0.955 × 500 = 477.5 Các thông số mô phỏng Thông số cần thiết NL = 4 NL = 9 v 80 lOMoARcPSD| 37054152 JM 0.0014 ξL 0.02 NG 1 KL 1400 JL 5.6 × 10−3 12.6 × 10−3 ωL 500 333.333 b0 0.984 1.968 b1 4.3 8.22 cp2 0.24 0.24 cv2 0.955 0.96 Kp2 120 120 Kv2 477.5 480
Tương tư với NL = 9. Các thông số iều khiển cần thiết ược tổng hợp trong bảng sau :
2.2.2. Mô phỏng trên MATLAB
Ta có mô hình Simulink ể mô phỏng hệ bậc 2 như sau :
Hình 9. Mô phỏng hệ servo một trục bậc 2
Với NL = 4, và các thông số ở bảng 3, ta ược kết quả như sau : lOMoARcPSD| 37054152
Hình 10. Đáp ứng vị trí của hệ bậc 2(NL=4)
Hình 11. Đáp ứng vận tốc của hệ bậc 2(NL=4)
Với NL = 9, và các thông số ở bảng 3, ta ược kết quả như sau : lOMoARcPSD| 37054152
Hình 12. Đáp ứng vị trí của hệ bậc 2(NL=9)
2.3.Điều khiển tốc ộ thấp(Low-Speed) -
Sử dụng hệ servo bậc 1 ể iều khiển tốc ộ thấp : lOMoARcPSD| 37054152
Hình 14. Mô hình hệ servo một trục bậc 1
2.3.1. Tính toán thông số iều khiển
Ta có : Nmax = 3000(rpm) = 314.16(rad s⁄ ). Để iều khiển tốc ộ thấp thì : 1 v < Nmax = × 314.16 = 15.708(rad s⁄ ) 20
→ Ta chọn v = 10(rad s⁄ )
Từ datasheet ộng cơ M4-2952(A) và ề bài, ta có thông số sau :
JM = 0.0014(kgm2); NG = 1; KL = 2300; cP = 0.24; cv = 0.82.
Để hệ servo áp ứng nhanh và không bị dao ộng thì: Chọn ξ = 0.02
Với NL = 4, ta tính ược các thông số cần thiết : J NL =
N2LJM JL = NLNG2JM = 4 × 12 × 0.0014 = 5.6 × 10−3 G DL ξL = DL lOMoARcPSD| 37054152
2√JLKL b0 = (1 + NL)cpcv = (1 + 4) × 0.24 × 0.82 = 0.984
b1 = (1 + NL)(cv + 2cpcvξL) + 2NLξL
= (1 + 4)(0.82 + 2 × 0.24 × 0.82 × 0.002 ) + 2 × 4 × 0.002 = 4.12 b0 0.984 cp1 = b1 = 4.12 = 0.24
Kp1 = cp1ωL = 0.24 × 500 = 120 Các thông số mô phỏng Thông số cần thiết NL = 4 NL = 9 v 80 JM 0.0014 ξL 0.02 NG 1 KL 1400 JL 5.6 × 10−3 12.6 × 10−3 ωL 500 333.333 b0 0.984 1.968 b1 4.12 8.22 c 0.24 0.24 p2 Kp2 120 120
2.3.2. Mô phỏng trên MATLAB lOMoARcPSD| 37054152
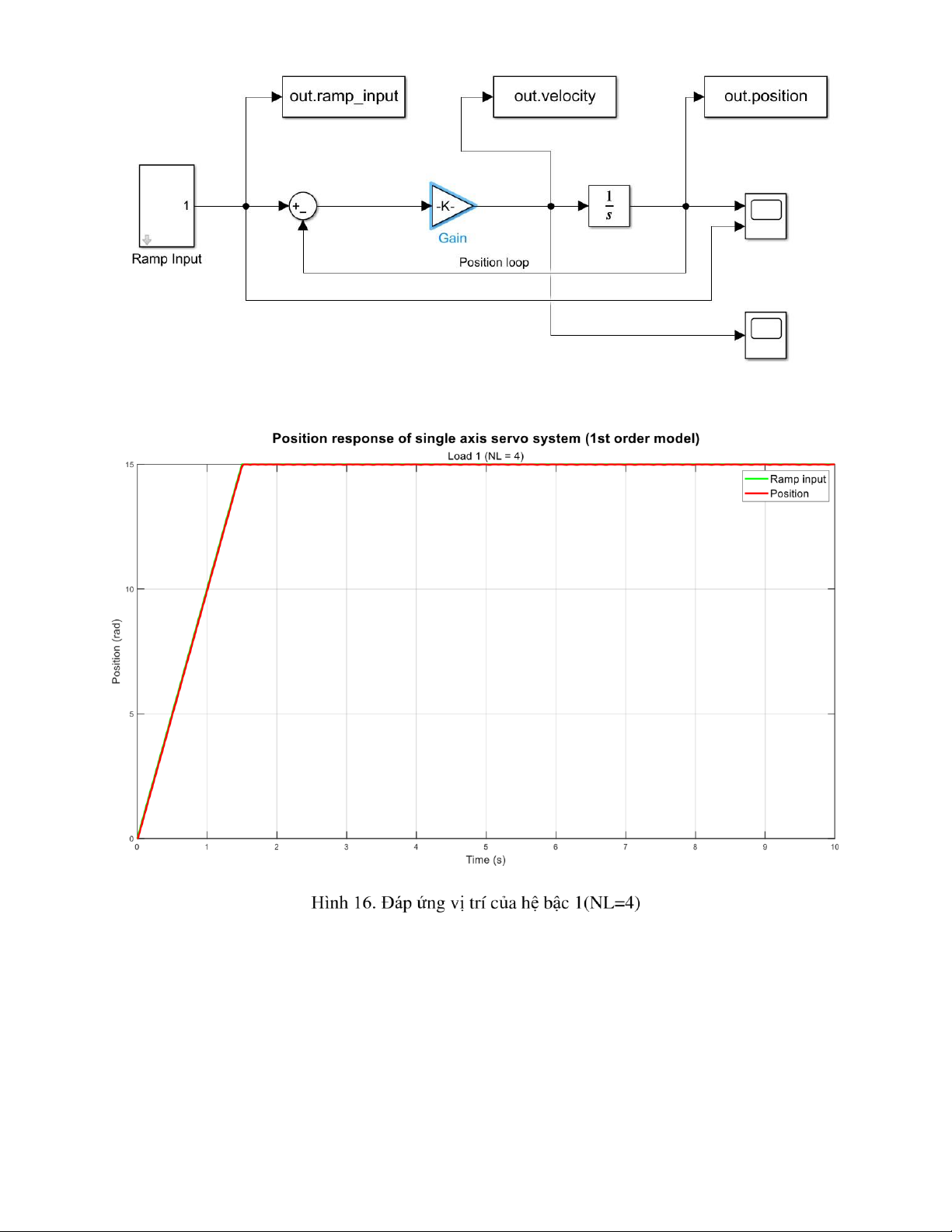
Hình 15. Mô phỏng hệ servo một trục bậc 1 lOMoARcPSD| 37054152
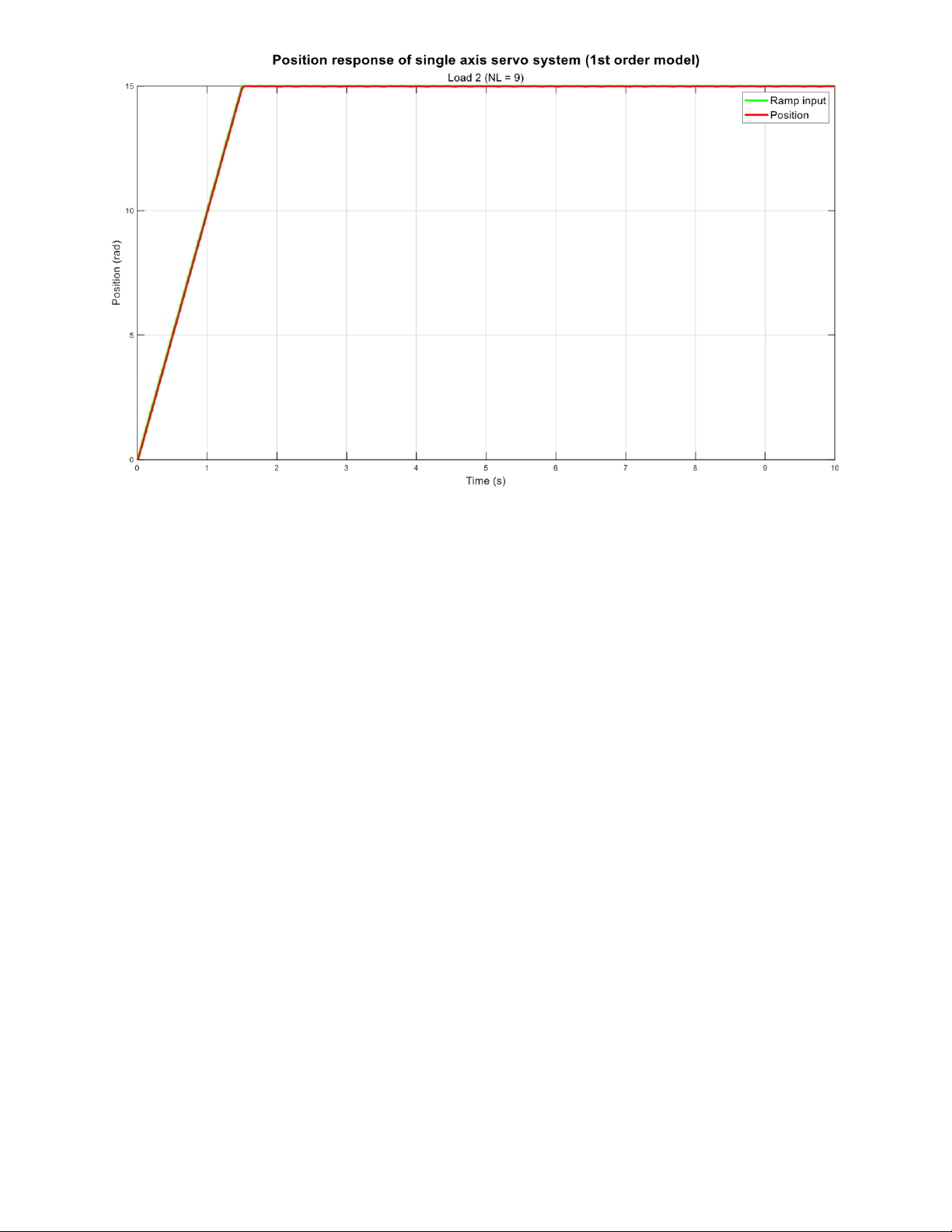
Hình 17. Đáp ứng vị trí của hệ bậc 1(NL=9) 2.4. Kết luận
Từ các kết quả mô phỏng, ta có thể thấy áp ứng vận tốc của hệ bậc 1 có dao ộng lớn và vọt lố hơn
so với vận tốc của hệ bậc 2 và bậc 4. Còn áp ứng ngõ ra vị trí luôn ảm bảo bám sát theo giá trị
mong muốn mà không xuất hiện dao ộng hay vọt lố. Ngoài ra, khi thay ổi thông số của tải NL mà
vẫn giữ nguyên hệ số giảm chấn ξ thì hệ thống vẫn áp ứng giống nhay cho 2 thông số của tải ở cả
ba cấp tốc ộ cao, trung bình và thấp.
3. Mô phỏng iều khiển vận tốc và vị trí DC servo sử dụng thuật toán PID
3.1.Mô phỏng iều khiển vận tốc
3.1.1. Xây dựng mô hình ể mô phỏng trên MATLAB Simulink
Ta có sơ ồ mạch iện tương ương của ộng cơ DC : lOMoARcPSD| 37054152
Hình 18. Sơ ồ mạch iện tương ương và sơ ồ khối của ộng cơ DC
Trong ó : Điện áp u là tín hiệu vào
Vận tốc góc 𝜔 là tín hiệu ra Điện trở phần ứng R Điện cảm phần ứng L
Hằng số sức iện ộng 𝐾𝑒
Sức phản iện ộng 𝑒 = 𝐾𝑒 𝜔
Sơ ồ khối chung của ộng cơ DC
Hình 19. Sơ ồ khối chung ối với iện áp vào và ngõ ra góc
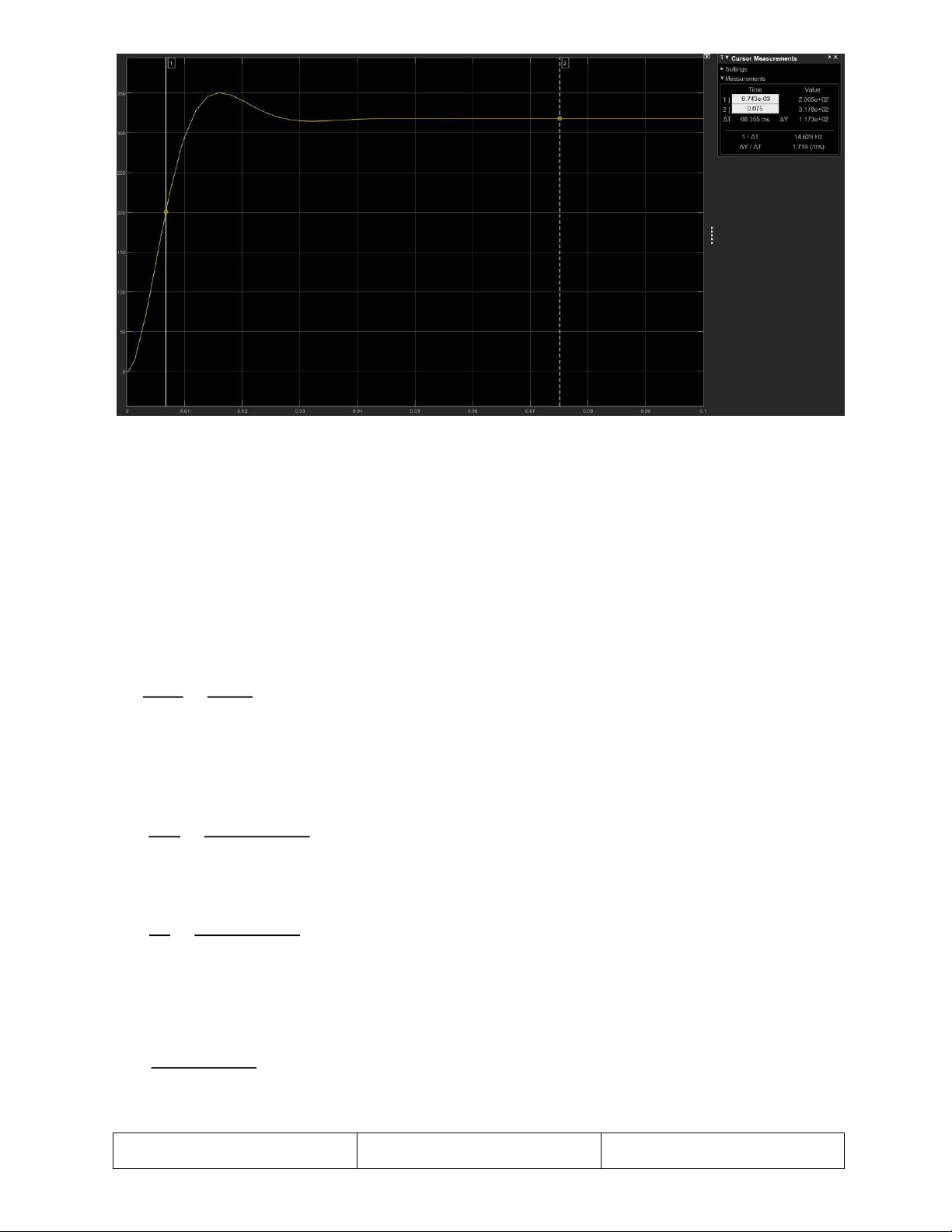
Dùng phương pháp thực nghiệm tìm hàm truyền ộng cơ lOMoARcPSD| 37054152 Hình 20. Thực nghiệm
Từ phương pháp thực nghiệm ta có ược cái thông số như sau :
Tại 𝑢63% = 63%𝛥𝐶𝑉 = 0.63 × (317.8 − 0) = 200.214
→ 𝜏𝑖 = 66.743 × 10−3(𝑠) Chọn 𝜏𝐶 = 0.03(𝑠) 𝑢𝑚𝑎𝑥 317.8 𝐾 = =≈ 2.76 𝑢 115
Từ số liệu thu thập, ta tính ược cái thông số còn lại của hàm truyền của ộng cơ 𝜏𝑖 6.743 × 10−3 𝐾𝑐 = == 0.0814 𝐾𝜏𝐶 2.76 × 0.03 𝐾𝐶 0.0814 𝐾𝐼 =
𝜏𝑖 = 6.743 × 10−3 = 12.0773 𝐾𝑃 = 𝐾𝐶 = 0.0814 1 𝐾𝑏 = 6.743 × 10−3 = 148.3019
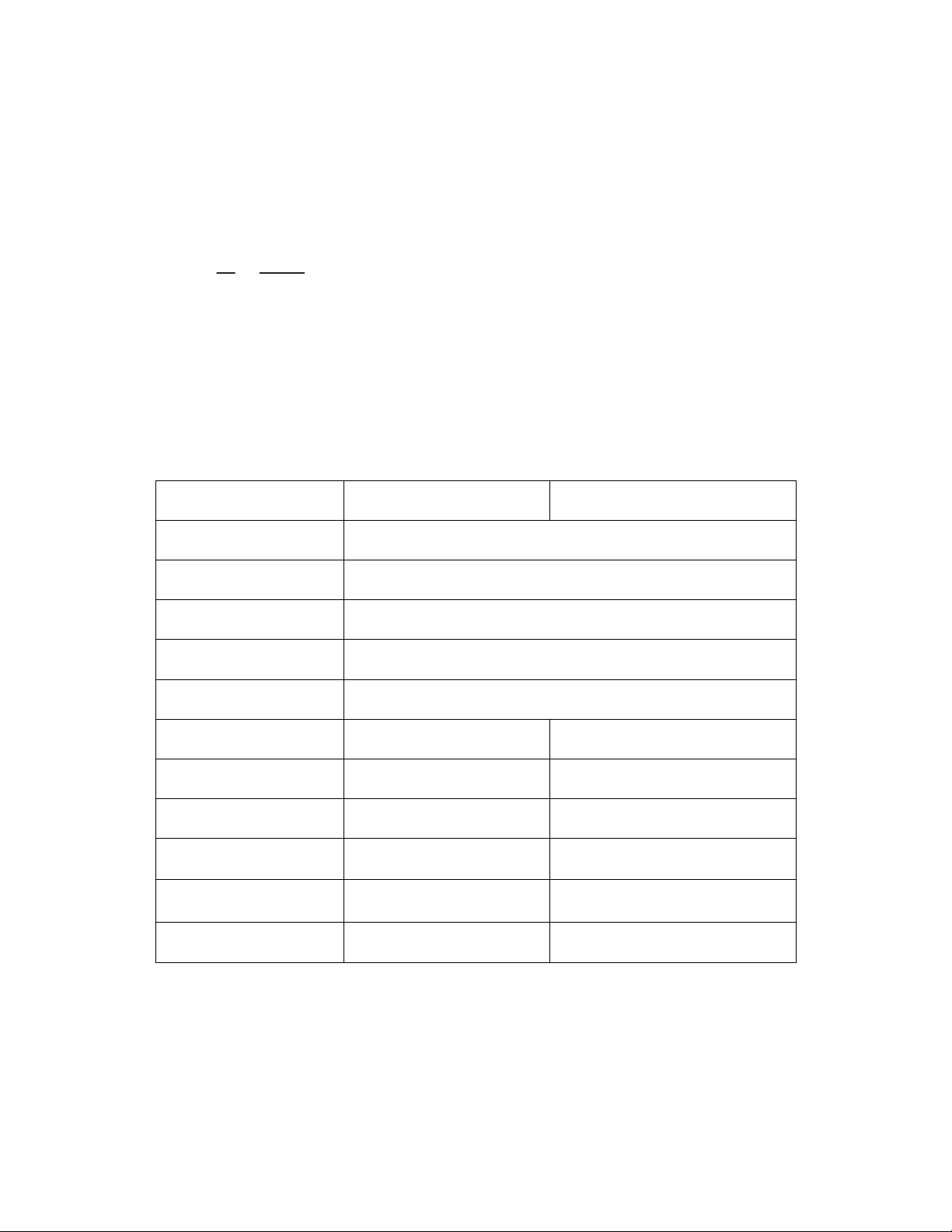
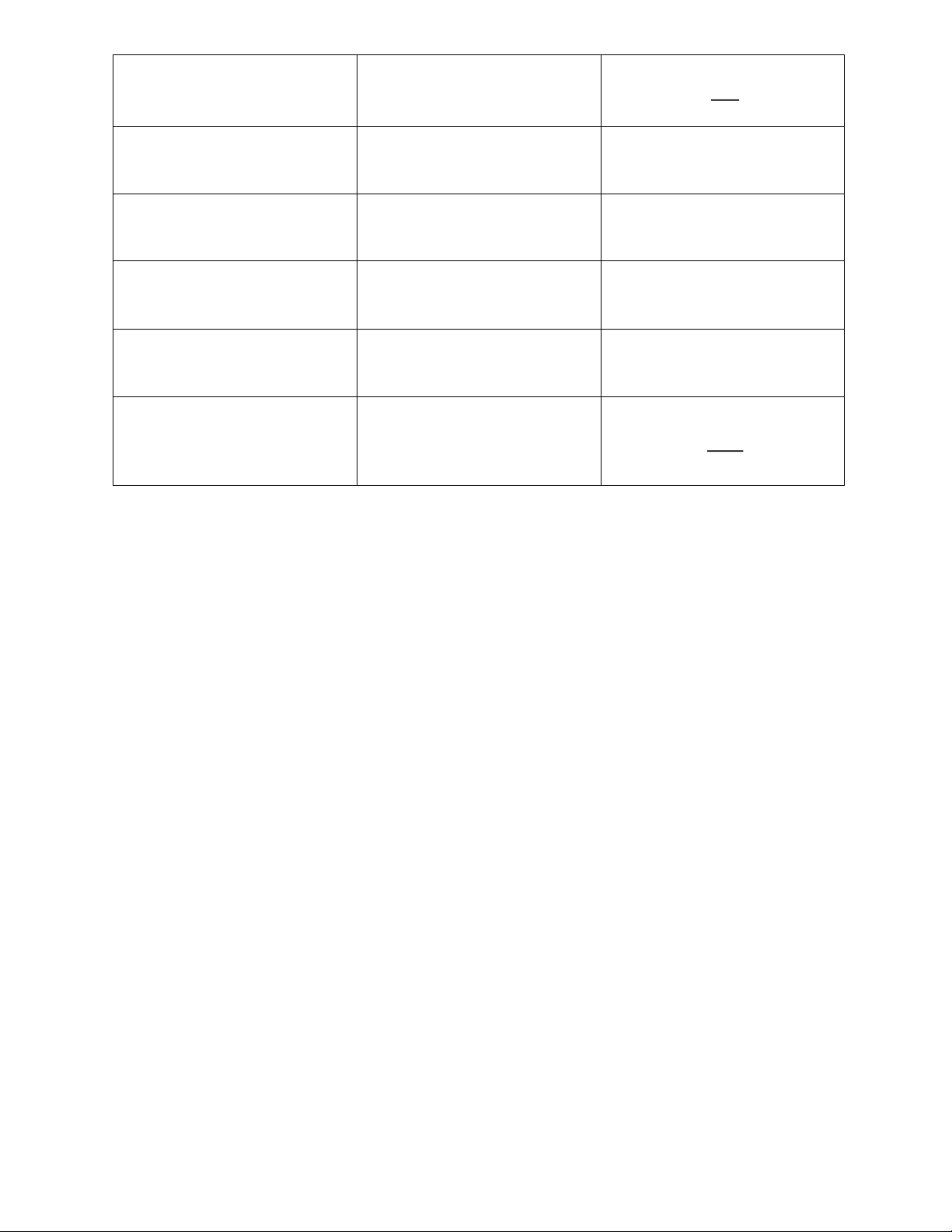
Thông số của ộng cơ M4-2952-A Đại lượng Giá trị Đơn vị lOMoARcPSD| 37054152 Hằng số moment Km Nm 0.361 (Torque constant) A Độ tự cảm L 0.0016 H (Inductance) Điện trở R 0.452 Ω (Resistance) Moment quán tính Jm kgm2 0.0014 (Inertia moment)
Hằng số sức iện ộng Ke 0.361 V/rad/s (Back emf constant) Hệ số ma sát nhớt b Nms 0.000716
(viscous friction coefficient) rad
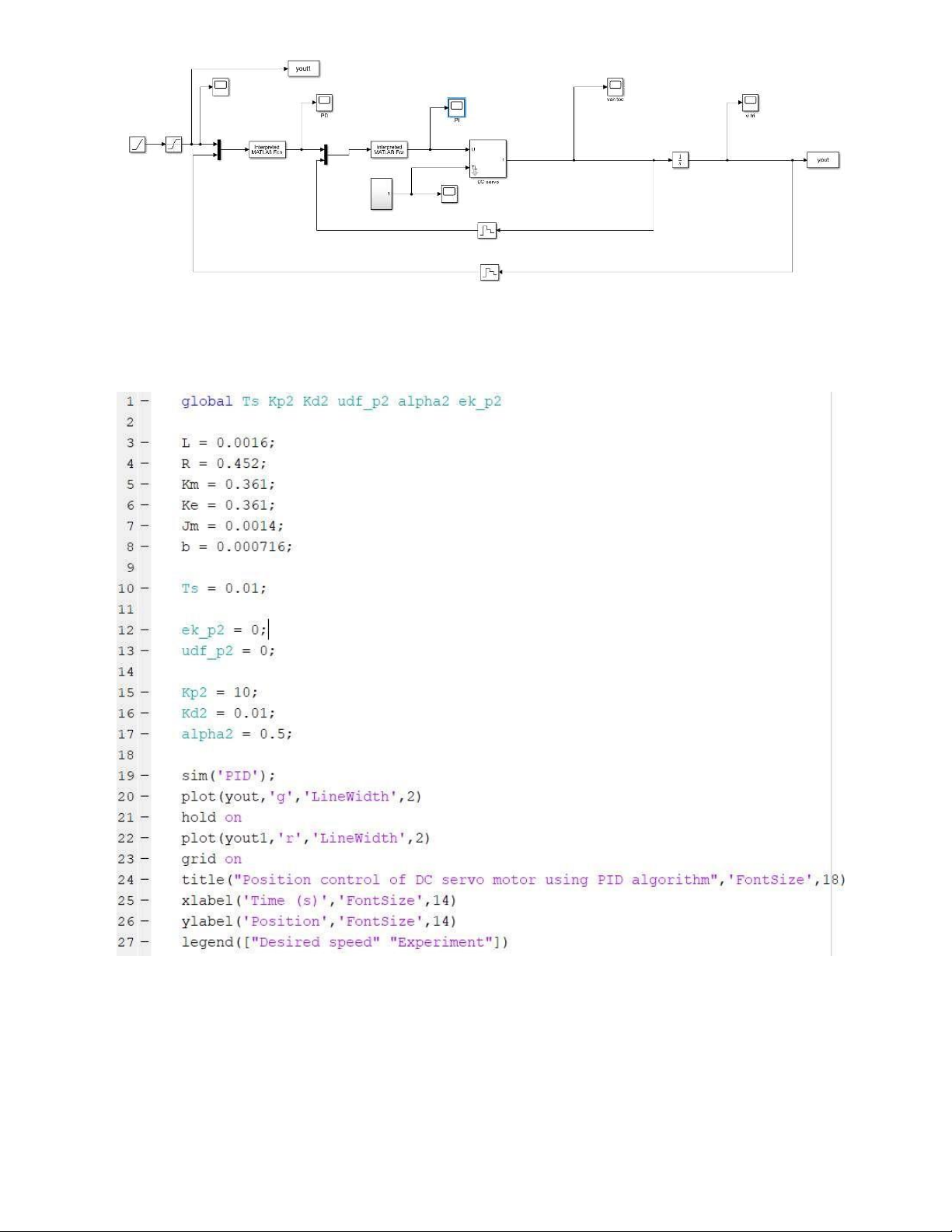
3.1.2. Mô phỏng bằng MATLAB (code) lOMoARcPSD| 37054152 Hình 20. Code MATLAB
3.1.3. Mô phỏng áp ứng vòng hở của vận tốc lOMoARcPSD| 37054152
Hình 21. Mô phỏng iều khiển vận tốc sử dụng PID
Hình 22. Mô phỏng ộng cơ DC servo
Hình 23. Hàm vận tốc ngõ vào và hàm nhiễu
3.2.Mô phỏng iều khiển vị trí
3.2.1. Xây dựng mô hình ể mô phỏng trên MATLAB Simulink lOMoARcPSD| 37054152
Hình 24. Mô phỏng iều khiển vị trí sử dụng PID
3.2.2. Mô phỏng bằng MATLAB(code) Hình 25. Code MATLAB 3.3.Kết quả mô phỏng
3.3.1. Mô phỏng áp ứng vận tốc
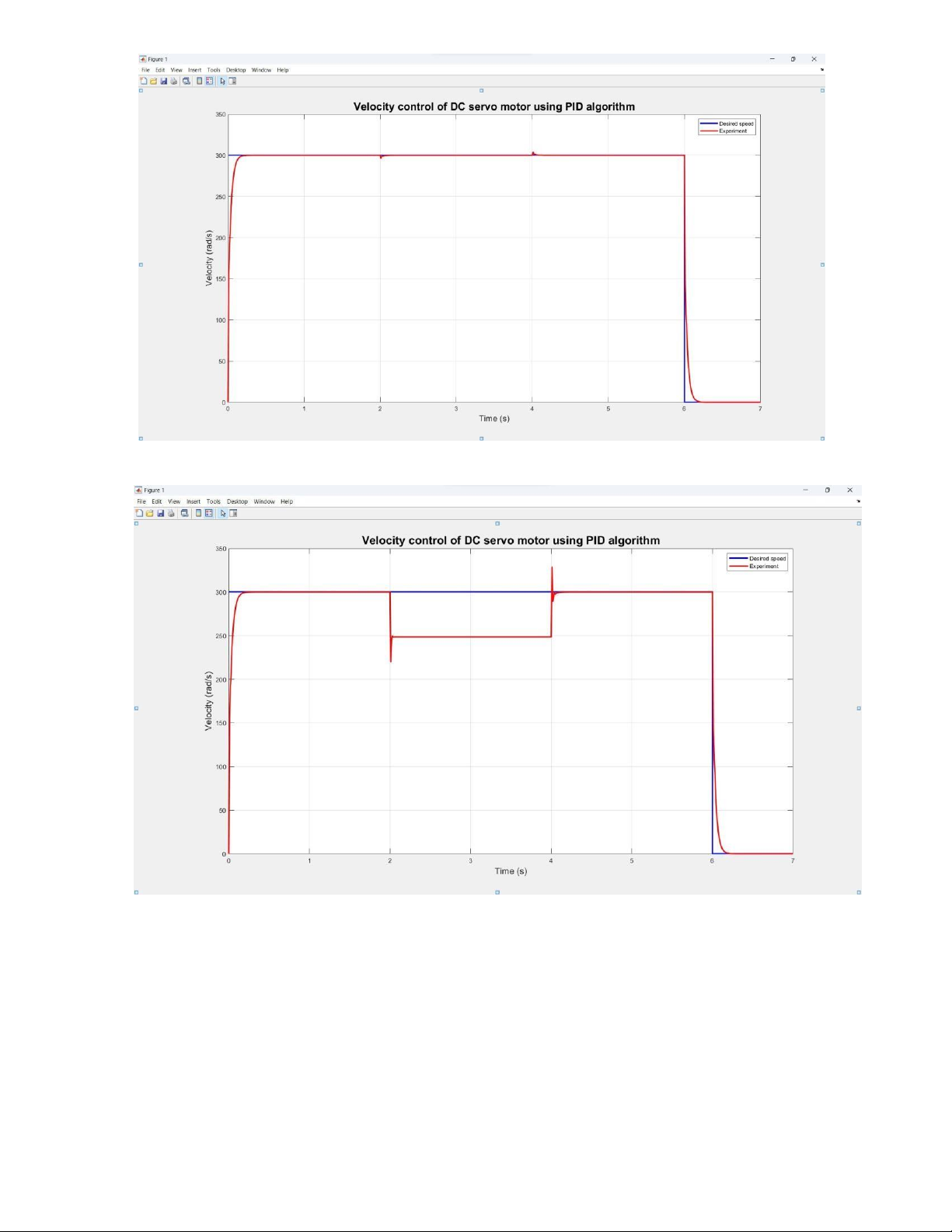
Trường hợp có anti-windup lOMoARcPSD| 37054152
Hình 26. Đáp ứng vận tốc và iện áp ngõ vào khi nhiễu nhỏ tác ộng
Hình 27. Khi bị nhiễu lớn tác ộng
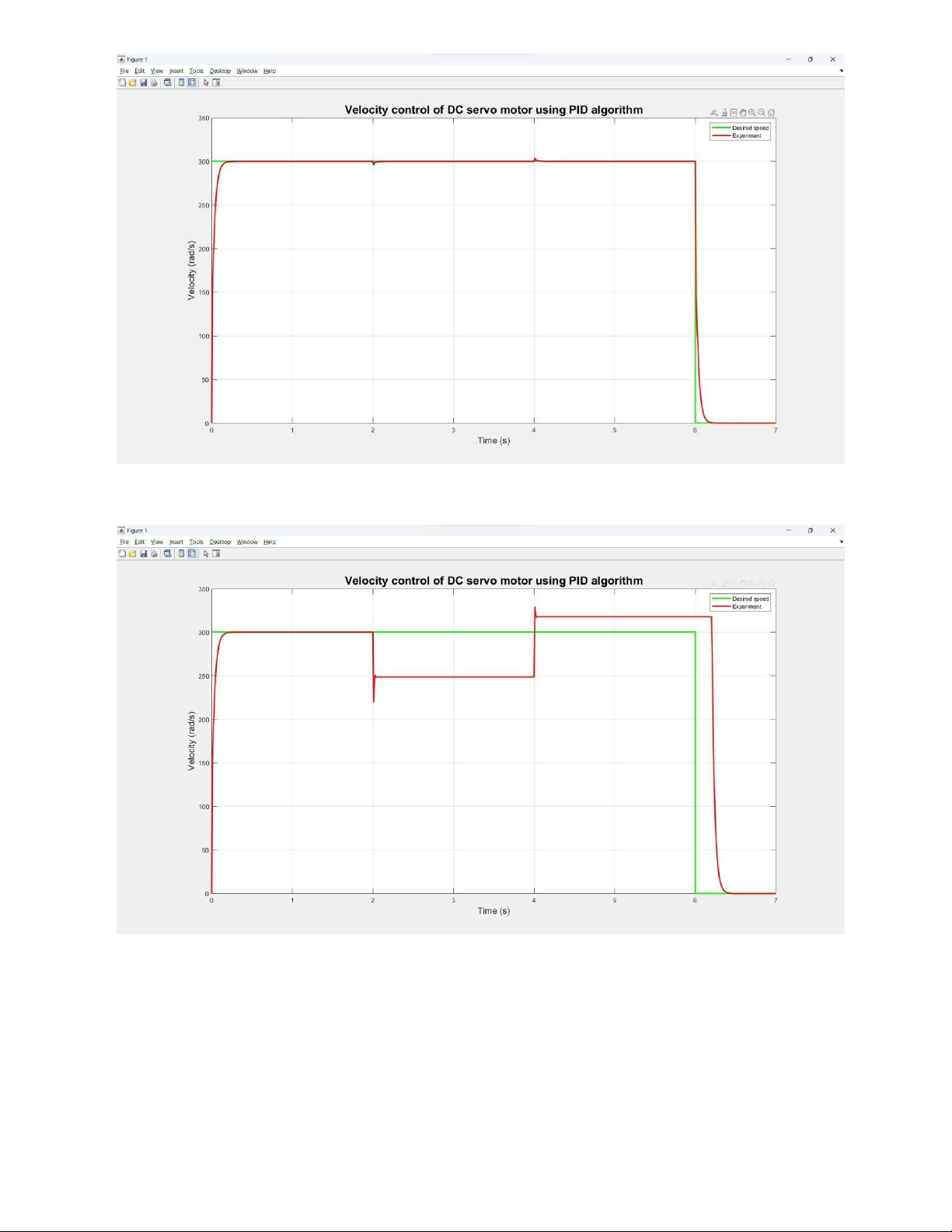
Trường hợp không có anti-windup lOMoARcPSD| 37054152
Hình 28. Khi có nhiễu nhỏ tác ộng
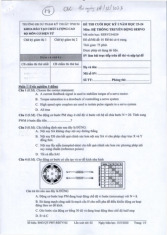
Hình 29. Khi có nhiễu lớn tác ộng Nhận xét
Ta có thể thấy ược nếu không có nhiễu hoặc nhiễu nhỏ tác ộng thì hệ thống áp ứng tốt.
Khi nhiễu lớn tác ộng, nếu không có anti-windup cho khâu I thì sẽ dẫn ến sai lệch vận tốc rất lớn
và sau khi nhiễu ngưng tác ộng thì ộng cơ không thể trở về ược vận tốc mong muốn là 300 (rad/s) lOMoARcPSD| 37054152
mà ã vọt lố qua. Khi muốn ổi chiều thì ộng cơ cũng không thể áp ứng kịp mà phải chờ một
khoảng thời gian mới giảm tốc ổi chiều lại ược.
Khi có anti-windup cho khâu I thì lúc nhiễu lớn tác ộng, ộng cơ không thể chạy úng vận
tốc mong muốn, khi không còn nhiễu thì ộng cơ lại áp ứng rất tốt và mượt mà, khi ổi chiều thì
cũng không gặp tình trạng sai lệch mà có thể áp ứng ngay ược. 3.3.2. Mô phỏng áp ứng vị trí
Hình 26. Đáp ứng vị trí
Hình 27. Đáp ứng vị trí lOMoAR cPSD| 37054152 Nhận xét
Từ 2 biểu ồ mô phỏng 2 vị trí khác nhau, ta thấy ược khi sử dụng PI ể iều khiển vận tốc và PD ể
iều khiển vị trí cho ược kết quả có ộ chính xác tương ối cao. Khi cho nhiễu tác ộng thì sai lệch
không quá lớn, không ảnh hưởng ến vị trí mong muốn.
Tài liệu liên quan:
-

Matlab Simulation of DC Servo Motors for Control Systems | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
144 72 -

Hydraulic Servo System Overview with Mitsubishi Modules | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
128 64 -

Test 1: Servo Motor Control Loops & Feedback Strategies | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
107 54 -
Đề thi cuối học kì 1 năm học 23-24 Môn Mechatronic Servo System Control | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
137 69 -

Trạm AC servo và hydralic servo system | Báo cáo thực tập Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
132 66