Bài tập lớn nhập môn khoa học xã hội và nhân văn | Trường Đại học Sư phạm Hà Nội
Bài tập lớn nhập môn khoa học xã hội và nhân văn | Trường Đại học Sư phạm Hà Nộivới những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng, ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cHướng dẫn viết bài báo cao khoa học | Trường Đại học Sư phạm Hà Nộiũng như có thể vận dụng tốt những kiến thức mình đã học vào
Môn: Nhập môn khoa học xã hội và nhân văn 143 tài liệu
Trường: Trường Đại học Sư Phạm Hà Nội 3.3 K tài liệu
Tác giả:

Preview text:
1. Hãy xác định hàm truyền đạt của đối tượng là khâu quán tính bậc hai k G(s) =(1+T .1s)(1+T .2s)
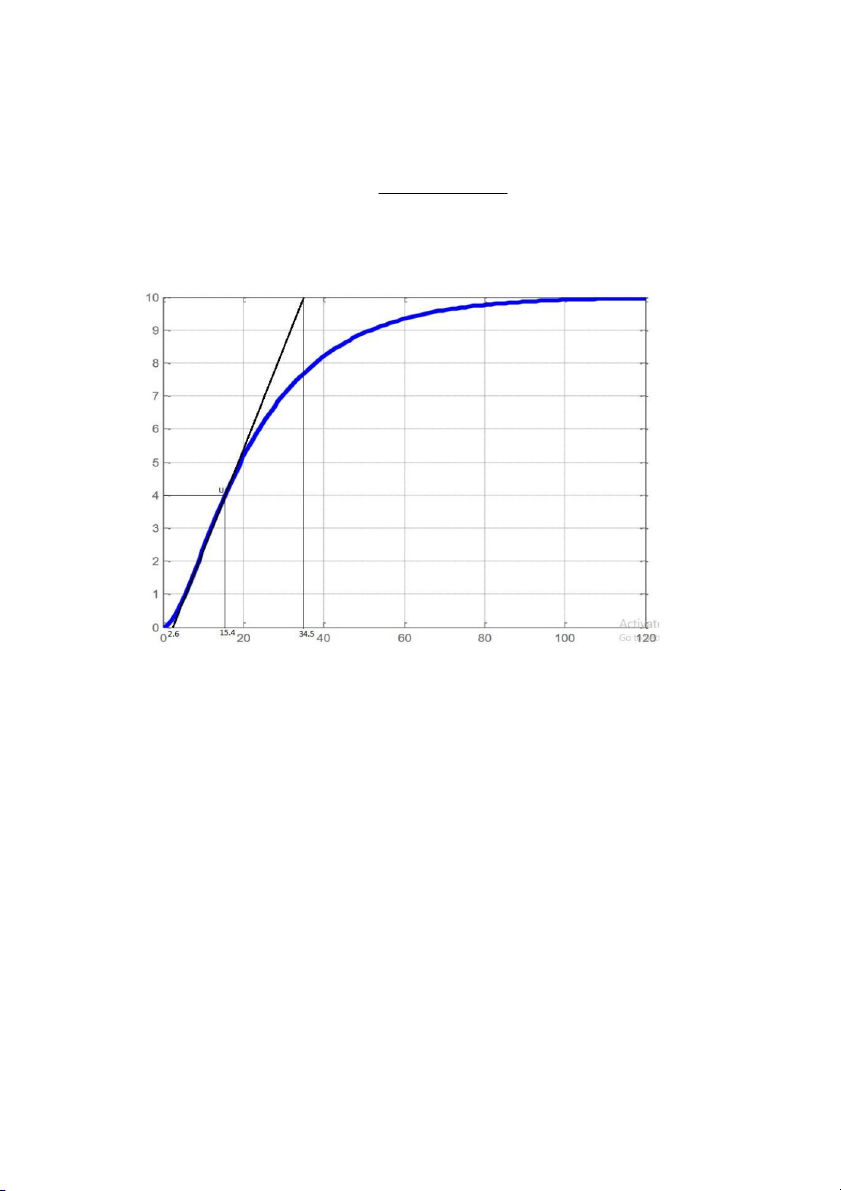
Xét đồ thị hàm quá độ của đối tượng ta có: Điểm uốn U (15. k=h(∞)= 10
Kẻ tiếp tuyến với h(t) tại điểm U ta xác định được a=2.6 ; b=34.5 – 2.6= 31.9
a/b=2.6/31.9=0.08 <0.103648 Tra bảng suy ra x=0.2622 f1(x)=x^(x/(x-1))
T1= b / f1(x) =19.82; T2= x.T1=5.20 Chọn T1= 10 10 G(s) =(1 + 2 .0s)(1 + 5.s) = 1 + 10 . 0 s2 + 25. s
2. Thiết kế bộ điều khiển theo phương pháp tối ưu độ lớn. 1
𝑅(𝑠) = 𝑘𝑝 (1 +Ti.s) kp = T1 = 20 2kT2 2.1 . 0 5
𝑅(𝑠) = 0.2 (1 + 1 ) = 0.2 + 1 = 20.s+1 20.s 100.s 100.s
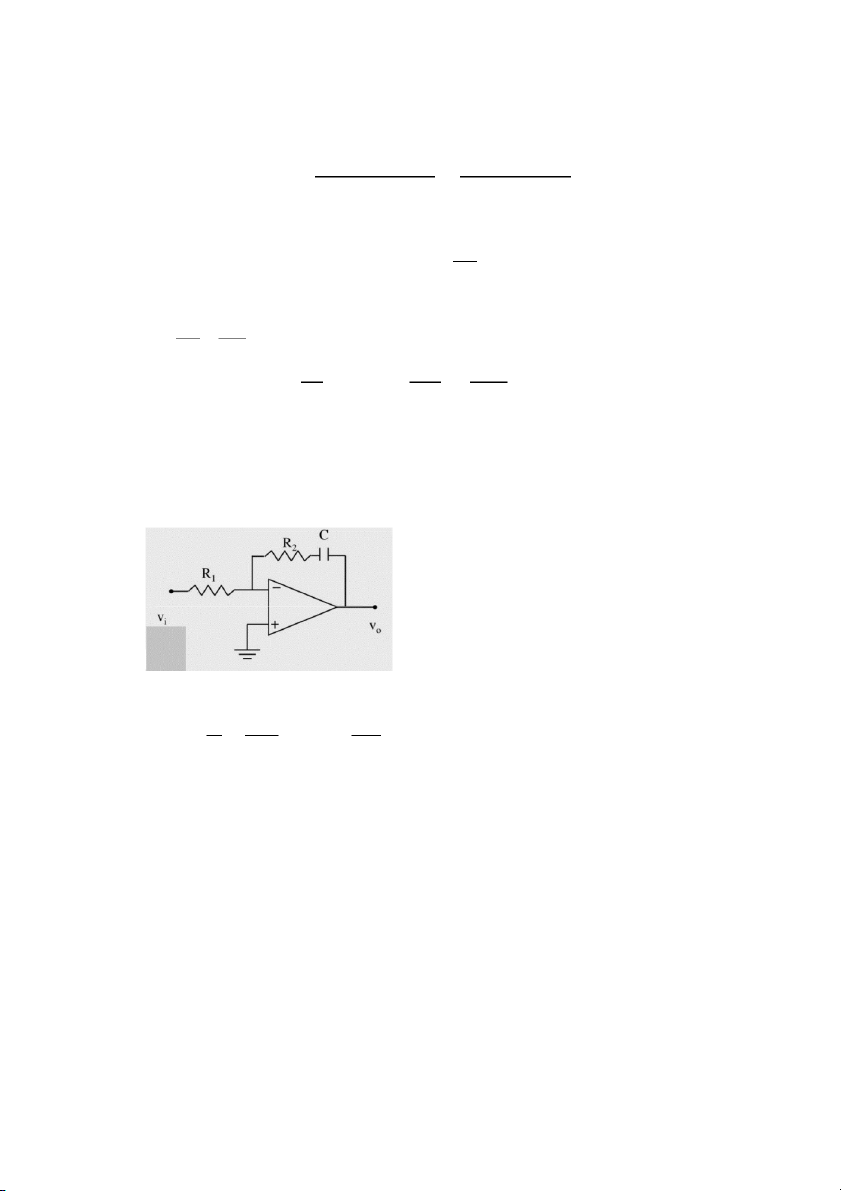
3. Dùng mạch khuếch đại thuật toán xây dựng bộ điều khiển tìm được ở câu , tính các thông số
của mạch khuếch đại thuật toán R(s) = - R2+ -1 = 0.2 + 1 R1 C.R . 1 s 100.s
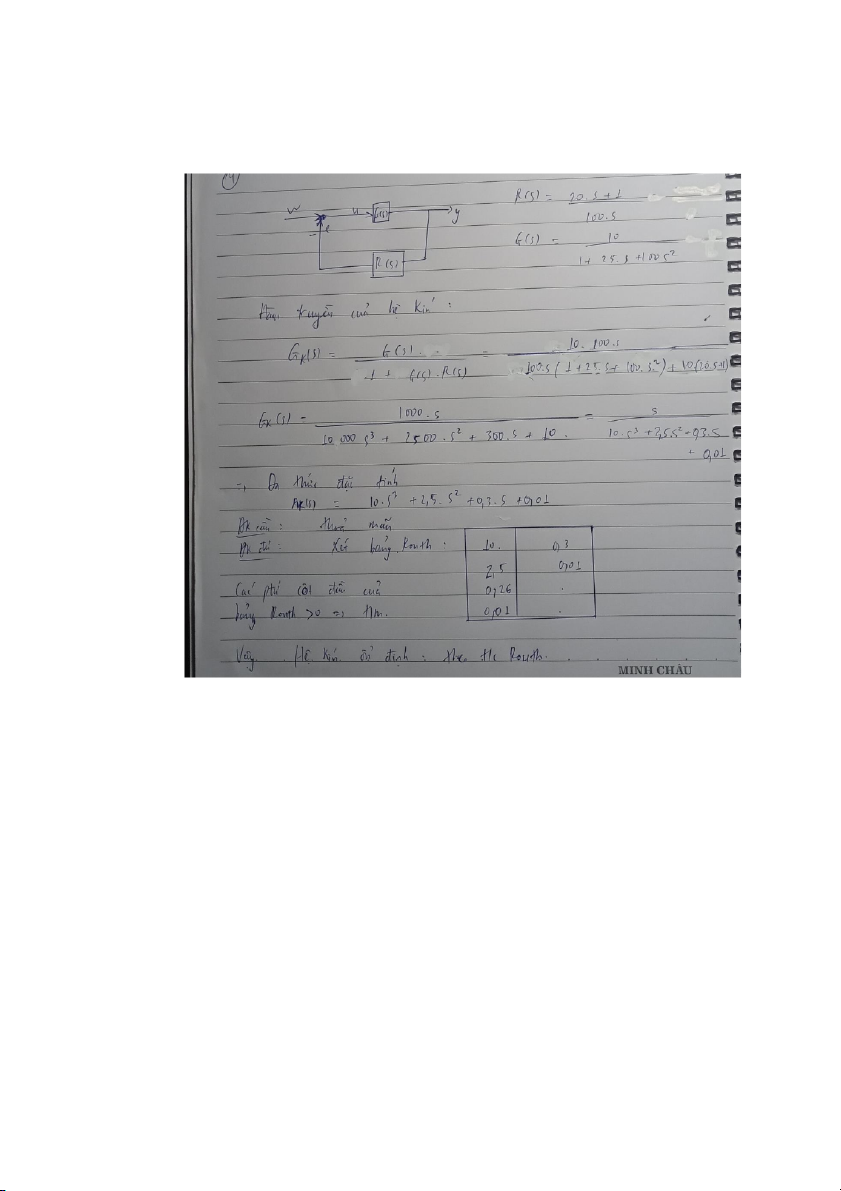
4. Khảo sát tính ổn định của hệ thống kín
5. Mô phỏng hệ thống trên Simulink
Tài liệu liên quan:
-

Đề cương Nhập môn khoa học xã hội và nhân văn | Trường Đại học Sư Phạm Hà Nội
16 8 -

gáoán ịchử àịa ýuonwg tình thcs
15 8 -
Đề cương Lịch sử văn minh thế giới kỳ 2 (2022 - 2023) | Trường Đại học Sư Phạm Hà Nội
46 23 -

Đề cương Môn Nhập môn khoa học xã hội và nhân văn | Đại học Sư Phạm Hà Nội
127 64 -

Nội dung ôn tập Môn Nhập môn khoa học xã hội và nhân văn | Đại học Sư Phạm Hà Nội
77 39