Báo cáo Bài tập lớn môn Truyền động điện hiện đại | Trường Đại học Bách Khoa, Đại học Đà Nẵng
Bài tập lớn môn Truyền động điện hiện đại | Trường Đại học Bách Khoa, Đại học Đà Nẵng. Tài liệu được biên soạn dưới dạng file PDF gồm 18 trang, giúp bạn tham khảo, ôn tập và đạt kết quả cao trong kì thi sắp tới. Mời bạn đọc đón xem!
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:





Preview text:
lOMoARcPSD| 41967345
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC BÁCH KHOA KHOA ĐIỆN
MÔN: TRUYỀN ĐỘNG ĐIỆN HIỆN ĐẠI
Giáo viên hướng dẫn: TS. Ngô Văn Quang Bình
Sinh viên thực hiện: Huỳnh Văn Hùng Đặng Nhật Huy
Nguyễn Quốc Hiển Lê Thanh Thưởng Nhóm học phần 20.34 :
Đà Nẵng, tháng 3/2024 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình MỤC LỤC 1
Mô hình toán học trên hệ tọa độ αβ............................................................................4 2
Mô phỏng mô hình động cơ trên Matlab simulink...................................................10 2.1
Xây dựng nguồn 3 pha:......................................................................................10 2.2
Xây dựng khối chuyển đổi Clark:......................................................................11 2.3
Xây dựng mô hình động cơ không đồng bộ theo hàm truyền đạt:.....................12 3
So sánh mô hình với động cơ thực trong matlab simulink:......................................15 3.1
Xây dựng động cơ thực:....................................................................................15 3.2
Thông số của động cơ thực:...............................................................................15 3.3
So sánh momen Te và tốc độ rotor ωm của mô hình với động cơ thực:.............16 3.4
Kết luận:............................................................................................................17
MỤC LỤC HÌNH ẢNH
Hình 2-1 Sơ đồ khối nguồn 3 pha .................................................................................................. 11
Hình 2-2 Thông số nguồn 3 pha ..................................................................................................... 11
Hình 2-3 Kết quả mô phỏng nguồn 3 pha ...................................................................................... 12
Hình 2-4 Sơ đồ khối phép chuyển đổi Clark .................................................................................. 13
Hình 2-5 Kết quả mô phỏng uαs và uβs ......................................................................................... 13
Hình 2-6 Sơ đồ mô hình hóa động cơ không đồng bộ theo hàm truyền đạt .................................. 14
Hình 2-7 Sơ đồ khối toàn hệ thống ................................................................................................ 14
Hình 2-8 Kết quả đồ thị momen ..................................................................................................... 15
Hình 2-9 Kết quả đồ thị tốc độ ....................................................................................................... 15
Hình 2-10 Kết quả mô phỏng iαs và iβs ......................................................................................... 16
Hình 2-11 Kết quả mô phỏng iαr và iβr .......................................................................................... 16
Hình 3-1 Sơ đồ mô phỏng động cơ thực trong matlab simulink .................................................... 16
Hình 3-2 Sơ đồ khối toàn hệ khi so sánh với động cơ thực ........................................................... 17
Hình 3-3 Kết quả so sánh momen .................................................................................................. 18
Hình 3-4 Kết quả so sánh tốc độ......................................................................................17 1
Mô hình toán học trên hệ tọa độ αβ.
Động cơ điện không đồng bộ ba pha được mô tả bởi hệ phương trình vi phân bậc cao,
nguyên nhân là do các cuộn dây pha được phân bố rải về mặt không gian và các tương tác 2 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
qua lại giữa các mạch từ. Ta sử dụng hàm truyền đạt để mô tả động cơ, phục vụ cho việc
thiết kế bộ điều khiển.
Các đại lượng điện và từ thông được mô tả dưới dạng vector với các thành phần thực. Các chỉ số quy ước:
- Chỉ số viết bên phải, trên cao:
s: đại lượng mô tả trên hệ tọa độ a , cố định với stator.ẞ
r: đại lượng mô tả trên hệ tọa độ cố định với rotor.
- Chỉ số viết bên phải, phía dưới:
• Chữ cái thứ 1: s: đại lượng mạch stator.
r: đại lượng mạch rotor.
• Chữ cái thứ 2: d, q các thành phần thuộc hệ tọa
độ dq α ,β các thành phần thuộc
hệ tọa độ αβ - Các đại lượng viết đậm: vector, ma trận.
Xuất phát của mô hình là hai phương trình điện áp stator và điện áp rotor viết trên chính
hệ thống cuộn dây stator và rotor, tức là viết trên hệ tọa độ cố định với stator và trên rotor. Ta có:
- Phương trình điện áp trên stator: s uss=Rs iss+ dψdt s (1)
Với uss, iss: vecto điện áp, dòng điện trên hệ tọa độ cố định αβ.
R : điện trở stator; s
ψss: từ thông stator.
- Phương trình điện áp trên rotor:
r r dψrr ur=Rr ir+ dt (2) Với ur
: vecto điện áp, dòng điện trên hệ tọa độ rotor. r, irr
Rr: điện trở rotor; ψr : từ thông rotor. r
- Phương trình mô tả quan hệ giữa từ thông và dòng điện:
ψss=Lsiss+Lm isr 3 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
{ψrr=Lm irs+Lr isr (3 )
vớ i{Ls=Lm+Lsσ
Lr=Lm+Lrσ (4 )
Lm: điện cảm từ hóa; Ls , Lr: điện cảm stator, rotor;
Lsσ , Lrσ: điện cảm tản stator, rotor.
- Sử dụng phép biến đổi Park, phương trình từ thông được viết lại:
ψss=Lsiss+Lm isr=Lsiss+Lm irr ejθr (5)
ψrr=Lmirs+Lr isr=Lr irr+Lmiss e−jθr (6)
θr: góc lệch pha giữa trục tọa độ αβ và dq
- Nhân phương trình (2) và (6) với e jθr, mô hình động cơ trên hệ tọa độ αβ:
s s dψ ss us=Rs is+ dt (7)
s s dψrs s ur=Rr ir+ dt −jωr ψr (8)
ψss=Lsiss+Lm isr (9)
ψsr=Lrirs+Lmiss (10)
- Dựa theo phương trình (7) và (8), các thành phần điện áp của stator và rotor là: dψαs uαs=Rs iαs+ dt (11) 4 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình dψ βs uβs=Rs iβs+ dt (12) d ψαr uαr=Rr iαr+ dt +ωr ψ βr (13) dψ βr uβr=Rr iβr+ dt −ωr ψαr (14)
- Phương trình từ thông stator và rotor:
ψαs=Lsiαs+Lm iαr (15 )
ψ βs=Lsiβs+Lmiβr (16)
ψαr=Lr iαr+Lmiαs (17)
ψ βr=Lr iβr+Lm iβs (18)
- Dựa vào phương trình (11-14) và (15-18), ta có mô hình động cơ không đồng bộ
với các biến trạng thái là dòng điện:
Vi phân các phương trình (12-14) thu được: dψαs diαs diαr
dt =Ls dt +Lm dt (19) dψβs diβs diβr
dt =Ls dt +Lm dt (20) dψαr diαr diαs
dt =Lr dt +Lm dt (21) 5 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình dψβr diβr diβs
dt =Lr dt +Lm dt (22)
Thay phương trình (21) và (18) vào (13), ta có: diαr diαs
uαr=Rr iαr+Lr dt +Lm dt +ωr( Lriβr+Lmiβs) diαs diαr ↔ Lm
dt =uαr−Rriαr−Lr
dt −ωr Lriβr−ωr Lmiβs diαs uαr Rr Lr diαr ωr Lr ωr Lm
↔ dt = L −L iαr− Lm dt − Lm iβr− Lm iβs(23) m m
• Thay (19) vào (11), ta có: diαs diαr
uαs=Rs iαs+Ls dt +Lm dt diαr uαs Rs Ls diαs
→ dt =L −L iαs−Lm dt (24) m m
• Thay (24) vào (23), ta có: diαs uαr Rr Lr uαs Rs Ls diαs ωr Lr ωr Lm = − i dt L ( m Lm αr− Lm
Lm −Lm iαs− Lm dt )− Lm iβr− Lm iβs
diαs uαr Rr Lr Lr Rs Lr Ls diαs ωr Lr ωr Lm ↔ dt = Lm − iαr− 2 uαs+ 2 iαs+ 2 dt − Lm iβr− Lm iβs Lm Lm Lm Lm ↔ di ( ) αs
1− Lr L2s =uLαrm − RLmr iαr− LLmr2 uαs+ LLrmR2s iαs−ωLr mLr iβr−ωLr Lmm iβs dt Lm diαs Lm2 uαr Lm2 Rr Lm2 Lr Lm2 Lr Rs Lm2 ωr Lr
↔ dt = L 2 L L Lm −Lm2−Ls Lr Lm iαr− Lm2−Ls Lr Lm2 uαs+ Lm2−Ls Lr Lm2 iαs−Lm2−Ls Lr Lm iβr− 6 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình m − s r
↔ didtαs = Lm2−LmLs Lr uαr− LmL2−m RLrs Lr iαr− Lm2−LrLs Lr uαs+ Lm2L−r RLss Lr iαs− LLm2m−ωLr Ls Lr r iβr−LmL2−m2LωsrLr iβs
↔ didtαs = LLm2s−LrLLsmLr LusαrLr − LLsmL2−r LLms RLrr LisαrLr − Lm2L−s LLrs Lr uLαss +LLm2s−LrLRs Ls r iLαss −LLmm2ω−r LLss LL 2
rr iLβrs− LLsmL2−r LLm s Lωrr L L2m
Ls Lr−L2m • σ=1−
= :Hệ số tiêután (hệ số tiêutántổng). Ls Lr Ls Lr diαs −Lm Rr Lm 1 Rs ωr Lm ωr L2m
→ dt =σ L L uαr+σ Ls Lr iαr+σ Ls uαs−σ Ls iαs σ Ls iβr+σ Ls Lr iβs s r
• Tương tự làm cho các trường hợp còn lại, ta sẽ thu được các phương trình vi phân: diαs −Rs ωr L2m Rr Lm ωr Lm 1 Lm
dt = σ Ls iαs+σ LsLr iβs+σ LsLr iαr+ σ Ls iβr+σ Ls uαs−σ Ls Lr uαr (25)
diβs −ωr L2m Rs ωr Lm Rr Lm 1 Lm
dt = σ L Lr iαs−σ Ls iβs− σ Ls iαr+σ Ls Lr iβr+σ Ls uβs− σ Ls Lr uβr s diαr Rs Lm ωr Lm Rr ωr Lm 1 = i dt σ Ls Lr
αs− σ Lr iβs−σ Lr iαr− σ iβr−σ Ls Lr uαs+σ Lr uαr diβr ωr Lm Rs Lm ωr Rr Lm 1 = i dt σ Lr
αs+σ Ls Lr iβs+ σ iαr−σ Lr iβr−σ Ls Lr uβs+σ Lr uβr
- Ta có điện áp trên rotor bằng 0 nên: 7 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình diαs −Rs ωr L2m Rr Lm ωr Lm 1
dt = σ L iαs+σ Ls Lr iβs+σ Ls Lr iαr + σ Ls iβr+ σ Ls uαs s
diβs −ωr L2m Rs ωr Lm Rr Lm 1
dt = σ L L iαs−σ Ls iβs− σ Ls iαr+σ Ls Lr iβr+σ Ls uβs s r diαr Rs Lm ωr Lm Rr ωr Lm dt =σ Ls
iαs− σ Lr iβs−σ Lr iαr− σ iβr−σ Ls Lr uαs Lr diβr ωr Lm Rs Lm ωr Rr Lm
dt = σ Lr iαs+σ Ls Lr iβs+ σ iαr−σ Lr iβr−σ Ls Lr uβs - Phương
trình cân bằng momen động cơ: 3 ¿
T em=2 p Lm ℑ{ir is} dΩr T
em−T load−BΩr=J dt ωr=pΩr
Với: J, T : mômen quán tính và mômen tải; load p: số đôi cực từ;
Ω : tốc độ cơ của động cơ (rad/s); r
B: hệ số tổn thất ma sát.
- Ta thực hiện biến đổi laplace ngược các phương trình (13) để xác định các thành phần
dòng stator và rotor trong hệ tọa độ αβ:
Dòng stator trên trục alpha: diαs −Rs ωr L2m Rr Lm ωr Lm 1
dt = σ L iαs+σ Ls Lr iβs+σ Ls Lr iαr + σ Ls iβr+ σ Ls uαs s 2
→iαs s=−σ LRss iαs+σ Lωr Ls Lmr iβs+σ LRr Ls Lmr iαr+ωσ Lr Lsm iβr+σ L1 s uαs 8 lOMoAR cPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình Rs ωr L2m Rr Lm ωr Lm 1 ↔i ( ) αs
s+σ Ls =σ Ls Lr iβs+σ Ls Lr iαr+ σ Ls iβr+σ Ls uαs 1 ( ω )
r L2m iβs+σ LRr Ls Lmr iαr+ωσ Lr Lsm iβr+σ L1 s uαs ↔iαs= Rs σ Ls Lr s+ σ Ls σ Ls ωr L2m i R L ω L ↔i ( )
αs=sσ Ls+Rs
σ Ls Lr βs+σ Lr s Lmr iαr + σ Lr sm iβr+σ L1 s uαs
Dòng stator trên trục beta: diβs −ωr L2m Rs ωr Lm Rr Lm 1
dt = σ Ls Lr iαs−σ Ls iβs− σ Ls iαr+σ Ls Lr iβr+σ Ls uβs −ωr L2m Rs ωr Lm Rr Lm 1
→iβs s= σ Ls Lr iαs−σ Ls iβs− σ Ls iαr+σ Ls Lr iβr+σ Ls uβs Rs −ωr L2m ωr Lm Rr Lm 1 ↔i ( ) βs
s+σ Ls = σ Ls Lr iαs− σ Ls iαr+σ Ls Lr iβr+σ Ls uβs 1 −ω L2 ω L R L ↔i ( ) βs= Rs
σ Lrs Lmr iαs− σ Lrsm iαr+σ Lr s Lmr iβr+σ L1 s uβs s+ σ Ls ↔i ( )
βs=sσ Lσ Ls+s Rs
−σ Lωsr LLrm2 iαs−ωσ Lr Lsm iαr+σ LRr Ls Lmr iβr+σ L1 s uβs
Dòng rotor trên trục alpha: 9 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình diαr Rs Lm ωr Lm Rr ωr Lm
dt =σ Ls Lr iαs− σ Lr iβs−σ Lr iαr− σ iβr−σ Ls Lr uαs Rs Lm ωr Lm Rr ωr Lm
→iαr s=σ Ls Lr iαs− σ Lr iβs−σ Lr iαr− σ iβr−σ Ls Lr uαs Rr Rs Lm ωr Lm ωr Lm ↔i ( ) αr
s+σ Lr =σ Ls Lr iαs− σ Lr iβs− σ iβr−σ Ls Lr uαs 1 Rs Lm ωr Lm ωr Lm ↔i )
αr=s+ R (σ Ls Lr iαs− σ Lr iβs− σ iβr−σ Ls Lr uαs r σ Lr σ Lr Rs Lm ωr Lm ωr Lm ↔i ( )
αr=sσ Lr+Rr
σ Ls Lr iαs− σ Lr iβs− σ iβr−σ Ls Lr uαs Dòng rotor trên trục beta: diβr ωr Lm Rs Lm ωr Rr Lm
dt = σ L iαs+σ Ls Lr iβs+ σ iαr−σ Lr iβr−σ Ls Lr uβs r ωr Lm Rs Lm ωr Rr Lm
→iβr s= σ Lr iαs+σ Ls Lr iβs+ σ iαr−σ Lr iβr−σ Ls Lr uβs Rr ωr Lm Rs Lm ωr Lm
↔iβrs+σ L )= σ Lr iαs+σ Ls Lr iβs+ σ iαr−σ Ls Lr uβs r 1 ωr Lm Rs Lm ωr Lm ↔i ( )
βr= s+ Rr
σ Lr iαs+σ Ls Lr iβs+ σ iαr−σ Ls Lr uβs σ Lr 10 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình σ Lr ωr Lm Rs Lm ωr Lm ↔i ( )
βr= sσ Lr+Rr
σ Lr iαs+σ Ls Lr iβs+ σ iαr−σ Ls Lr uβs
Từ các phương trình dòng điện trên ta tiến hành mô phỏng động cơ điện không đồng bộ trên
hệ tọa độ với các biến trạng thái là các dòng điện stator và rotor dưới dạng hàm truyền đạt. 2
Mô phỏng mô hình động cơ trên Matlab simulink. 2.1
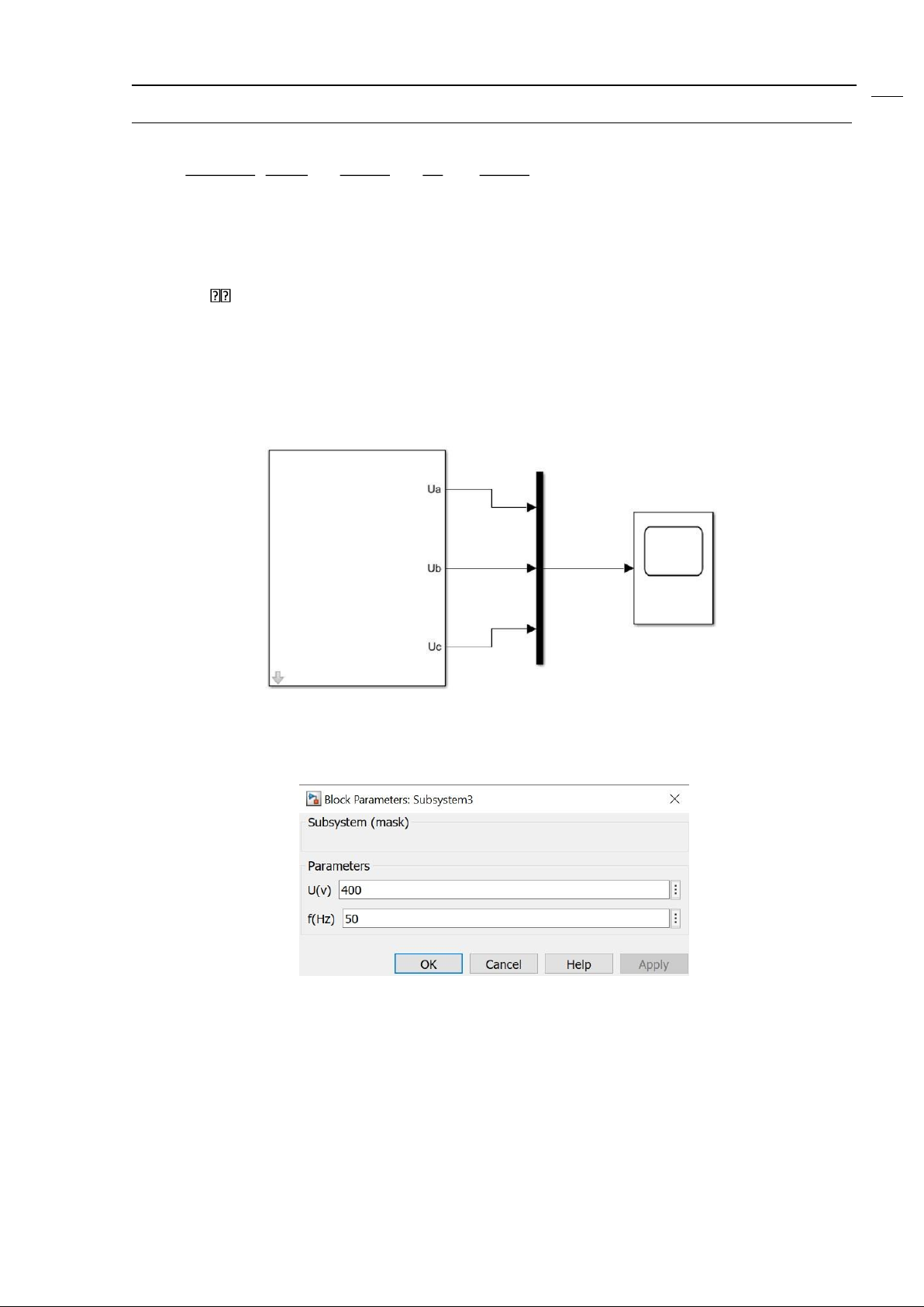
Xây dựng nguồn 3 pha:
Hình 2-1 Sơ đồ khối nguồn 3 pha.
- Thông số điện áp và tần số là:
Hình 2-2 Thông số nguồn 3 pha.
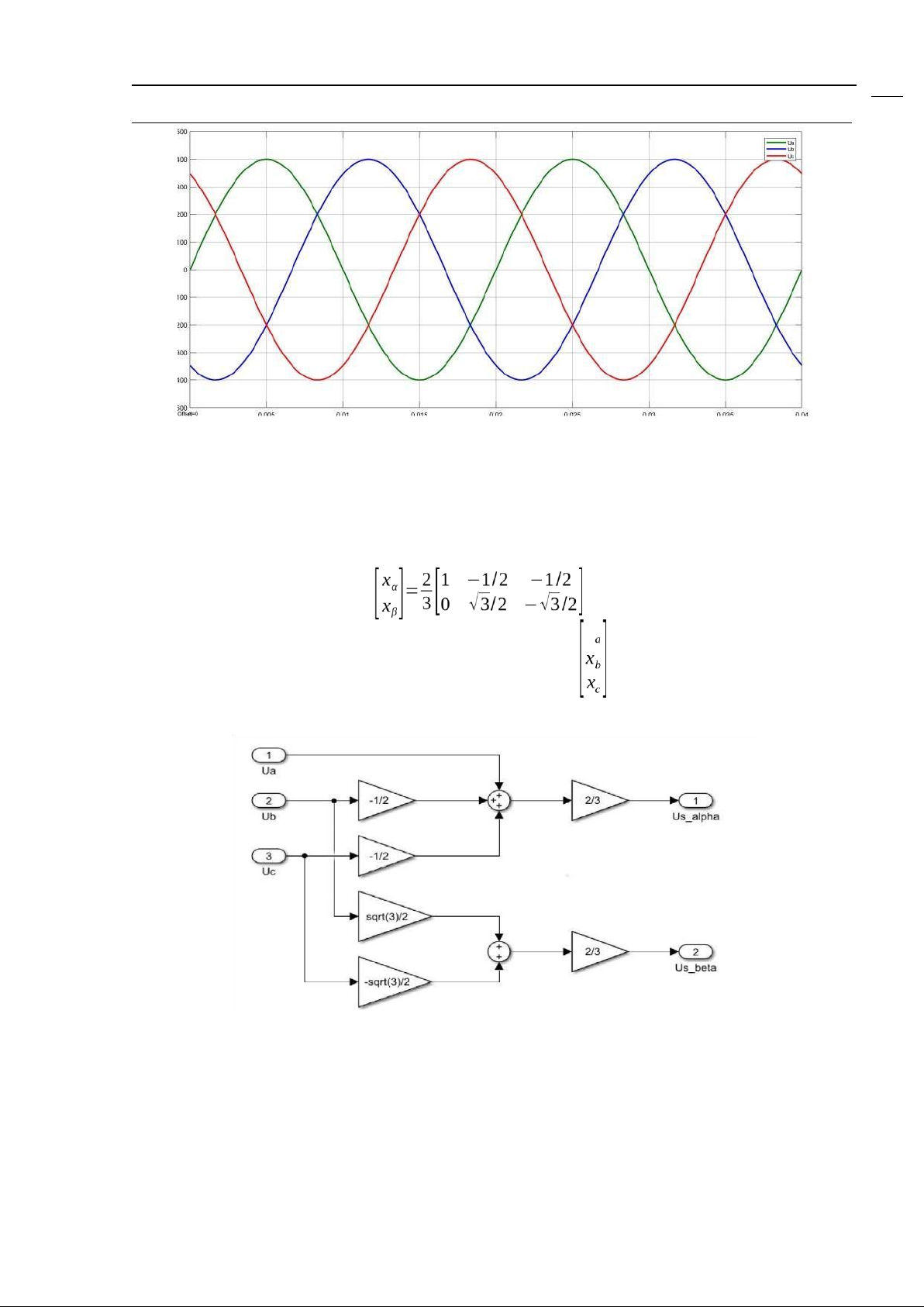
- Kết quả dòng điện 3 pha: 11 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
Hình 2-3 Kết quả mô phỏng nguồn 3 pha. 2.2
Xây dựng khối chuyển đổi Clark:
- Dựa theo công thức chuyển đổi Clark là: x
Ta xây dựng được khối Clark: 12 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
Hình 2-4 Sơ đồ khối phép chuyển đổi Clark.
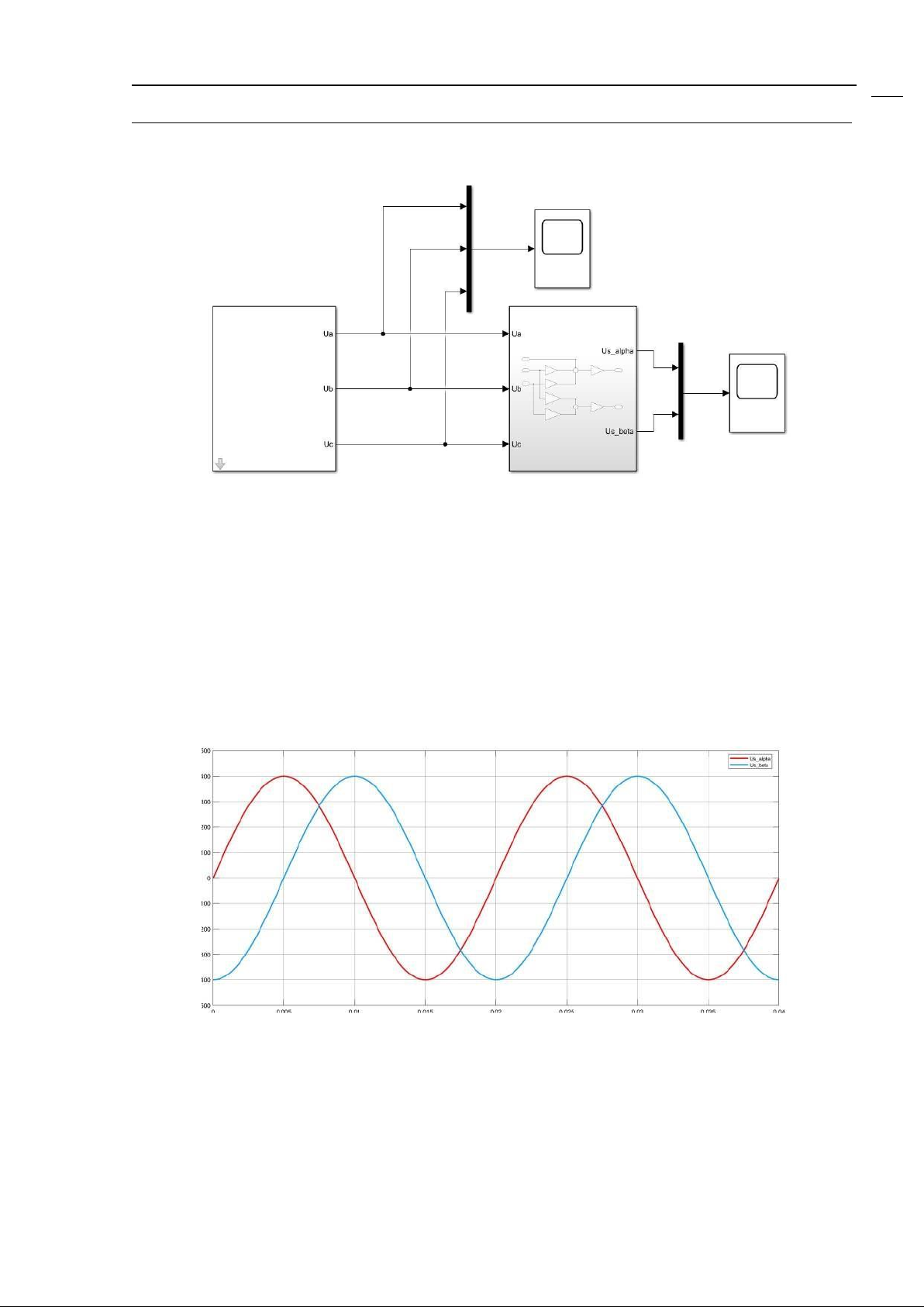
- Kết quả uαs và uβs:
Hình 2-5 Kết quả mô phỏng uαs và uβs. 2.3
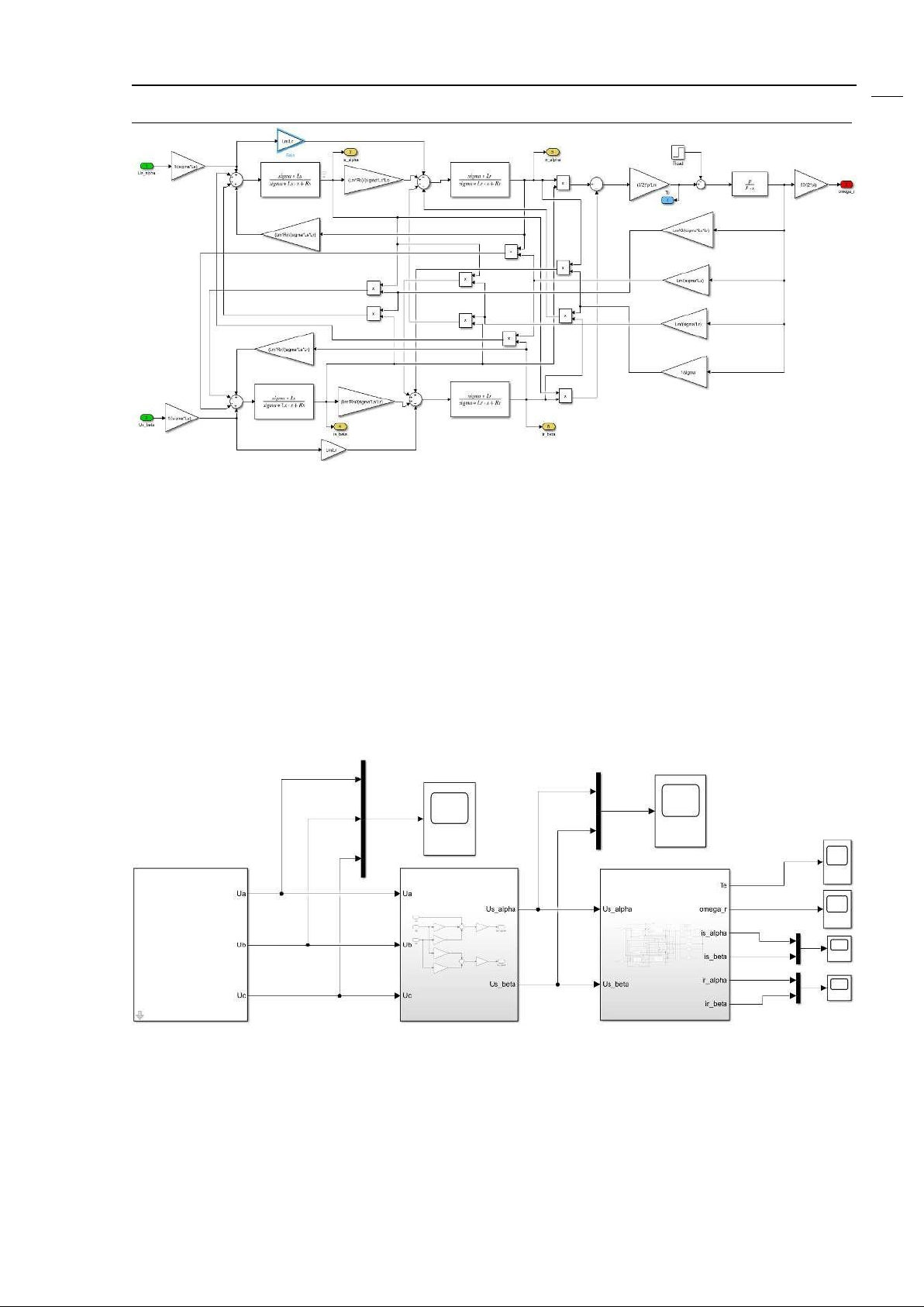
Xây dựng mô hình động cơ không đồng bộ theo hàm truyền đạt:
- Sử dụng các khối có sẵn trong simulink ta sẽ xây dựng được mô hình động cơ không
đồng bộ 3 pha dựa trên hàm truyền đạt ta phân tích ở trên: 13 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
Hình 2-6 Sơ đồ mô hình hóa động cơ không đồng bộ theo hàm truyền đạt.
- Sơ đồ toàn bộ hệ thống:
Hình 2-7 Sơ đồ khối toàn hệ thống. - Đồ thị momen: 14 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
Hình 2-8 Kết quả đồ thị momen. - Đồ thị tốc độ:
Hình 2-9 Kết quả đồ thị tốc độ.
- Kết quả iαs và iβs: 15 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
Hình 2-10 Kết quả mô phỏng iαs và iβs. -
Kết quả iαr và iβr:
Hình 2-11 Kết quả mô phỏng iαr và iβr. 3
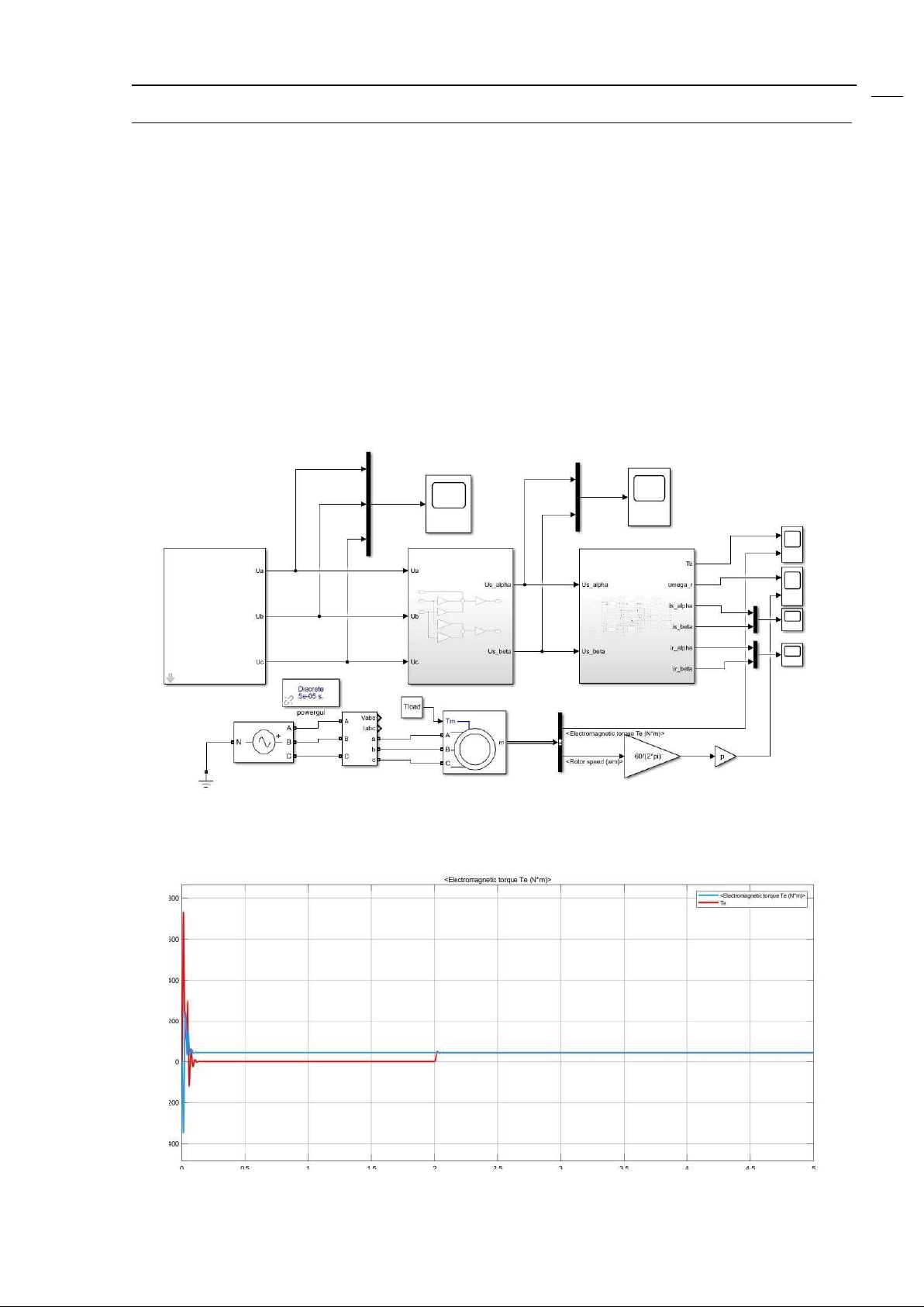
So sánh mô hình với động cơ thực trong matlab simulink: 3.1
Xây dựng động cơ thực:
Hình 3-12 Sơ đồ mô phỏng động cơ thực trong matlab simulink.
- Lấy 2 tín hiệu momen T e và tốc độ rotor ωm bằng khối “Bus Selector” 3.2
Thông số của động cơ thực:
Pn = 7500; % Công suất định mức(kW) Tm = 45; % Momen xoắn
Ud = 400; % Điện áp Ud(Vrms) Tload = 45; % Momen tải f = 50; % Tần số (Hz)
Rs = 0.435; % Điện trở Stato (Ohms) 16 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
Lls = 2.0e-3; % Điện cảm tản Stato(H)
Rr = 0.816; % Điện trở Rotor (Ohms)
Llr = 2.0e-3; % Điện cảm tản Rotor (H)
Lm = 69.31e-3; % Điện cảm từ hóa (H)
Ls = Lm + Lls; % Điện cảm Stato(H)
Lr = Lm + Llr; % Điện cảm Rotor(H) p = 2; % Số đôi cực từ
J = 0.089; % Momen quán tính (kg.m^2)
sigma = 0.0553; % Hệ số tản(hệ số tiêu tán tổng) 3.3
So sánh momen T e và tốc độ rotor ωm của mô hình với động cơ thực:
Hình 3-13 Sơ đồ khối toàn hệ khi so sánh với động cơ thực. - So sánh momen T e: 17 lOMoARcPSD| 41967345 Báo cáo bài tập lớn
GVHD: TS. Ngô Văn Quang Bình
Hình 3-14 Kết quả so sánh momen.
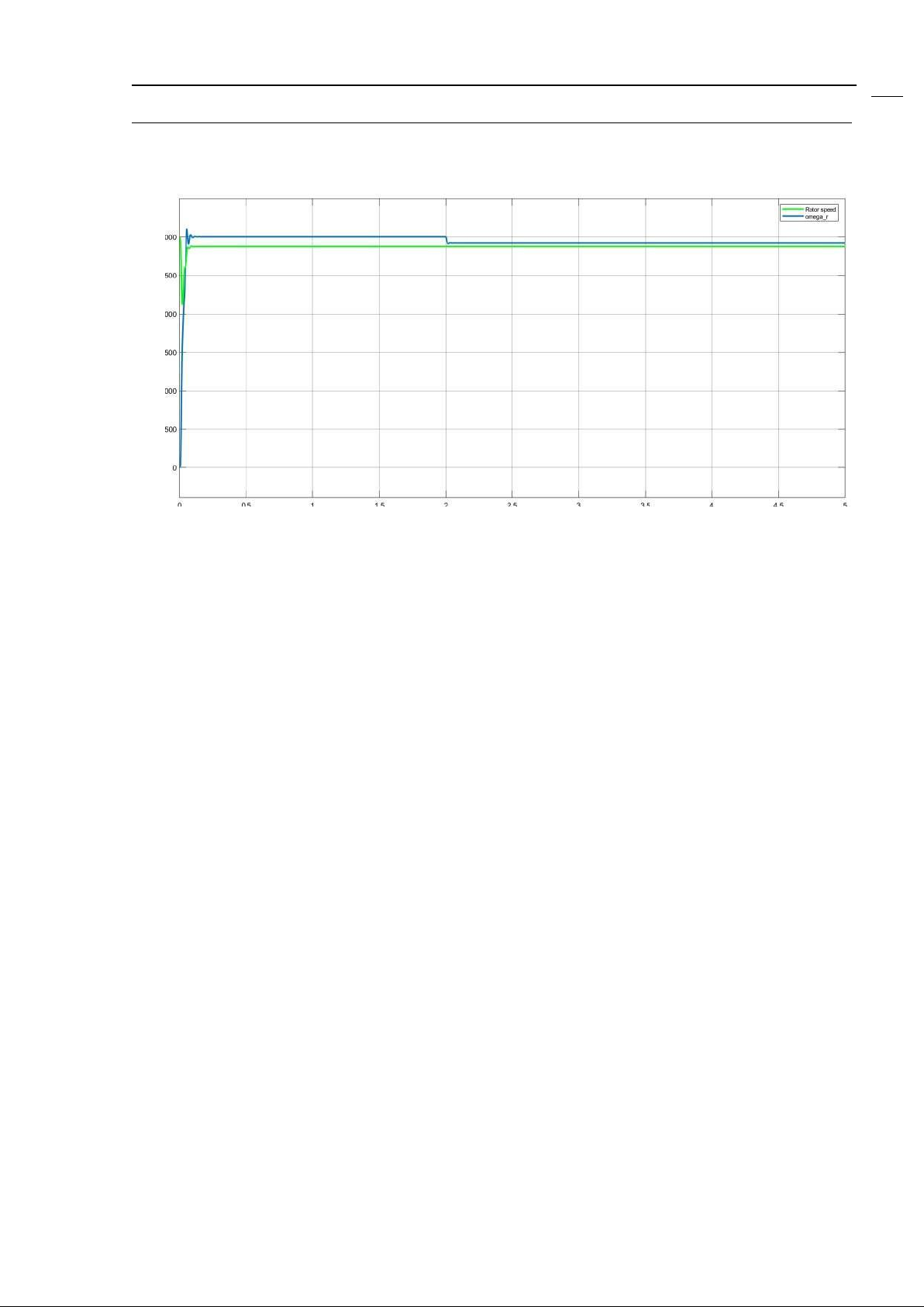
- So sánh tốc độ rotor ωm:
Hình 3-15 Kết quả so sánh tốc độ. 3.4 Kết luận:
- Đồ thị momen và tốc độ của động cơ thực và mô phỏng hoàn toàn bám sát nhau.
- Đều đi về giá trị xác lập. 18
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
15 8 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
54 27 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
45 23 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
46 23 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
47 24