BÁO CÁO ĐỒ ÁN CƠ SƠ | Đại học Kinh tế Kỹ thuật Công nghiệp
Các chân 1 đến 7 và 9 đến 11 là các chân đầu ra. Các chân này lần lượt thay đổi thành mức cao (nối tiếp nhau) trong một trình tự. Đối với mỗi tín hiệu đồng hồ, mỗi chân sẽ tăng cao trong một chuỗi. Chân kích hoạt / ức chế đồng hồ (chân 13) hay còn gọi là chân Enable.
Môn: An ninh mạng không dây 24 tài liệu
Trường: Trường Đại học Kinh tế kỹ thuật công nghiệp 1.6 K tài liệu
Tác giả:









Preview text:
lOMoARcPSD|468 843 48
BÁO CÁO ĐỒ ÁN CƠ SƠ Tên đề tài:
THIẾT KẾ CHẾ TẠO MẠCH IR ĐIỀU
KHIỂN BẰNG REMOTE TỪ XA SỬ DỤNG IC4017
Giảng viên hướng dẫn:
Th.S Lê Tuấn Đạt Lớp: DHDT14A1CL Sinh viên Lê Tiến Hạnh Đào Thị Thuỷ HÀ NỘI, 5/2023 MỤC LỤC
LỜI MỞ ĐẦU............................................................................................................... 4
1. Tính cần thiết của đề tài....................................................................................... 4
2. Mục đích cảu đề tài.............................................................................................. 4
3. Lời cảm ơn........................................................................................................... 4
CHƯƠNG 1: TỔNG QUAN VỀ MẠCH IR ĐIỀU KHIỂN BẰNG REMOTE TỪ
XA SỬ DỤNG IC4017.................................................................................................. 6
1.1. Mạch IR điều khiển bằng remote từ xa sử dụng IC4017.................................... 6
1.2. Ưu nhược điểm.................................................................................................... 6
1.2.1. Ưu điểm......................................................................................................... 6
1.2.2 Nhược điểm.................................................................................................... 6
1.3. Tìm hiểu về hồng ngoại..................................................................................
CHƯƠNG 2: CƠ SỞ LÝ THUYẾT VỀ MẠCH IR ĐIỀU KHIỂN BẰNG
REMOTE TỪ XA SỬ DỤNG IC4017.......................................................................... 7
2.1. IC CD4017.......................................................................................................... 7
2.1.1 Sơ đồ chân IC CD4017 và chức năng của từng chân.................................... 7
2.1.2 Giải thích hoạt động của các chân................................................................. 8
2.2. TSOP1738......................................................................................................... 11
2.2.1 Khái niệm về TSOP1738.............................................................................. 11
2.2.2 Sơ đồ chân TSOP1738................................................................................. 11
2.2.3 Các tính năng của bộ thu tín hiệu IR TSOP1738......................................... 12
2.2.4 Thông số kỹ thuật........................................................................................ 12
2.2.5 Nguyên lý hoạt động bộ thu tín hiệu IR...................................................... 13
CHƯƠNG 3: SẢN PHẨM MẠCH THỰC TẾ........................................................... 15
3.1 Mạch nguyên lý.................................................................................................. 15 2 lOMoAR cPSD| 46884348
3.1.1 Sơ đồ khối tổng quát (demo)........................................................................ 15
3.1.2 Mạch nguyên lý............................................................................................ 15
3.1.3 Tác dụng linh kiêṇvà nguyên lý hoạt đông ̣................................................. 15
3.1.3.1. Tác dụng linh kiện................................................................................. 15
3.1.3.2. Nguyên lý hoạt động............................................................................. 16
3.2 Mạch layout (PCB)............................................................................................. 16
3.2.1 Sơ đồ đi dây.................................................................................................. 16
3.2.2 Mạch layout.................................................................................................. 17
3.2.3 Mô phỏng 3D............................................................................................... 17
3.2.4 File mạch in.................................................................................................. 18
3.3 Hình ảnh thực tế quá trình làm sản phẩm thực tế............................................... 18
3.4 Môṭsố sự cố và cách khắc phục......................................................................... 21
CHƯƠNG 4: KẾT LUÂṆ VÀ ĐÁNH GIÁ............................................................... 22
4.1 Kết luận.............................................................................................................. 22
4.2 Đánh giá............................................................................................................. 22 3 lOMoAR cPSD| 46884348 LỜI MƠ ĐẦU
1. Tính cần thiết của đề tài
Mạch điều khiển mạch IR (Infrared) bằng remote từ xa là một trong những
ứng dụng rất phổ biến trong các thiết bị điện tử hiện nay. Việc sử dụng mạch
này giúp cho việc điều khiển các thiết bị điện tử nên dễ dàng hơn, tiện lợi hơn
và đặc biệt là giúp tiết kiệm điện năng. Trong đó, IC4017 là một trong những
linh kiện quan trọng trong mạch điều khiển mạch IR này. Với khả năng xác định
tín hiệu từ remote và điều khiển các thiết bị khác, IC4017 đã được sử dụng rộng
rãi trong các ứng dụng điện tử. Tuy nhiên, việc áp dụng mạch điều khiển mạch
IR bằng remote từ xa sử dụng IC4017 vẫn chưa được nhiều người biết đến và
hiểu rõ. Vì vậy, trong đề tài này, nhóm em sẽ tìm hiểu về cách thiết kế và hoạt
động của mạch điều khiển mạch IR bằng remote từ xa sử dụng IC4017, cùng
những ứng dụng thực tế của nó.
2. Mục đích cảu đề tài
Việc thiết kế và chế tạo mạch ir điều khiển bằng remote từ xa sử dụng
ic4017, không chỉ củng cố kiến thức đã được học ở môn đồ án và các môn kỹ
thuật trong nhà trường mà còn là cơ sở để khi phát triển thêm chúng ta có thể tự
sản xuất ra các mạch có tính thực dụng, sử dụng cần thiết cho các ngôi nhà
thông minh, phục vụ các yêu cầu trong mỗi gia đình khi lắp đặt công tắc điều
khiển đèn hoặc các đồ điện trong nhà trở nên dễ dàng hơn, cũng như người
khiếm khuyết có thể thao tác mà không phải vận động nhiều. 3. Lời cảm ơn
Đầu tiên, chúng em xin dành lời cảm ơn chân thành, và sâu sắc nhất tới Ths.
Lê Tuấn Đạt, thầy đã tận tình chỉ bảo, hướng dẫn, định hướng cho chúng em
trong suốt quá trình học tập và thực hành vừa qua.
Trong thời gian qua nhóm em đã cố gắng học tập và làm việc rất nhiệt tình
nhằm mang đến thành quả tốt nhất nhưng không thể tránh khỏi những sai sót.
Chúng em rất mong nhận được sự thông cảm và góp ý chân thành từ của thầy và 4 lOMoAR cPSD| 46884348
các bạn, để đề tài của chúng em hoàn thiện hơn. Chúng em xin chân thành cảm ơn! 5 lOMoAR cPSD| 46884348
CHƯƠNG 1: TỔNG QUAN VỀ MẠCH IR ĐIỀU KHIỂN BẰNG REMOTE
TỪ XA SỬ DỤNG IC DC4017
1.1.Tìm hiểu về mạch điều khiển bằng remote từ xa sử dụng IC DC4017
Mạch điều khiển từ xa sử dụng IC DC4017 là mạch được thiết kế để điều
khiển các thiết bị điện tử từ xa, chẳng hạn như đèn LED, bóng đèn, quạt,
hoặc máy tính. Bằng cách sử dụng một remote điều khiển từ xa, người dùng
có thể điều khiển các thiết bị này mà không cần phải tiếp xúc trực tiếp với chúng. 1.2.Ưu nhược điểm 1.2.1. Ưu điểm Độ tin cậy cao, Dễ sử dụng Chi phí thấp
Có thể được tùy chỉnh để phù hợp với các yêu cầu cụ thể.
1.2.2. Nhược điểm
Cần có kiến thức về lĩnh vực điện tử cơ bản và kỹ năng trong thiết kế mạch PCB
Phải cân nhắc đến các vấn đề liên quan đến bảo mật và an toàn
Vì mạch không có mã nên khi điều khiển thiết bị này có thể sẽ điều
khiển luôn cả thiết bị khác.
1.3. Tìm hiểu về hồng ngoại.
Hồng ngoại là gì?
Hồng ngoại là sự bức xạ năng lượng với tần số thấp hơn tần số mắt ta nhìn
thấy, vì vậy chúng ta không thể nhìn thấy nó được. Tuy nhiên chúng ta đều biết
mặc dù không nhìn thấy tần số âm thanh nhưng nó vẫn tồn tại và tai ta có thể nghe thấy chúng.
Ta không thể nhìn thấy hay nghe thấy hồng ngoại nhưng ta có thể cảm thấy
nó từ sự cảm ứng nhiệt trên da. Khi bạn đưa tay đến ngần ngọn lửa hoặc những
vật nóng, bạn xẽ cảm thấy nhiệt dù bạn không nhìn thấy. Bạn nhìn thấy ngọn lửa
là do nó phát ra nhiều loại bức xạ mắt ta có thể nhìn thấy, đồng thời nó cũng phát
ra hồng ngoại mà ta chỉ có thể cảm nhận qua da. 6 lOMoAR cPSD| 46884348
CHƯƠNG 2: CƠ SƠ LÝ THUYẾT VỀ MẠCH IR ĐIỀU
KHIỂN BẰNG REMOTE TỪ XA SỬ DỤNG IC4017 2.1. IC CD4017
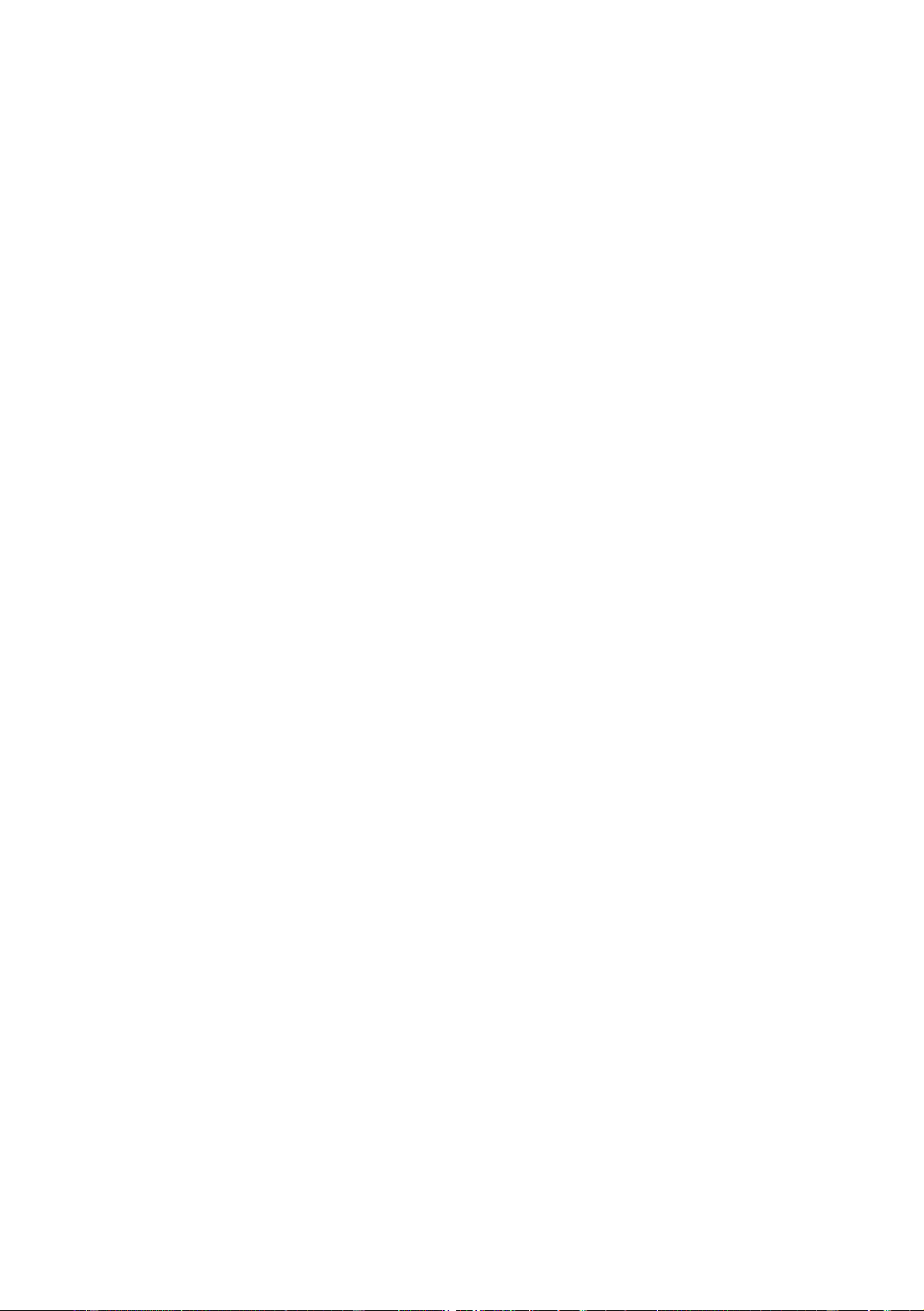
2.1.1 Sơ đồ chân IC CD4017 và chức năng của từng chân Hình 1: CD4017 Chức năng Chân Mô tả chân
Khi giá trị của số đếm là 5, nó sẽ 1 Output 5 có mức logic 1
Khi giá trị của số đếm là 1, nó sẽ 2 Output 1 có mức logic 1
Khi giá trị của số đếm là 0, nó sẽ 3 Output 0 có mức logic 1
Khi giá trị của số đếm là 2, nó sẽ 4 Output 2 có mức logic 1
Khi giá trị của số đếm là 6, nó sẽ 5 Output 6 có mức logic 1
Khi giá trị của số đếm là 7, nó sẽ 6 Output 7 có mức logic 1
Khi giá trị của số đếm là 1, nó sẽ 7 Output 3 có mức logic 1 8 GND
Chân nối với mặt đất của mạch.
Khi giá trị của số đếm là 8, nó sẽ 9 Output 8 có mức logic 1
Khi giá trị của số đếm là 4, nó sẽ 10 Output 4 có mức logic 1
Khi giá trị của số đếm là 9, nó sẽ 11 Output 9 có mức logic 1 7 lOMoARcPSD|468 843 48
Chân này có mức logic 1, khi số 12 Carry out
đếm vượt quá giá trị 10 và hữu ích
cho việc kết hợp nhiều IC.
Chân kích hoạt tích cực mức
thấp. Khi nó ở mức cao, mạch sẽ 13 Enable
không nhận được tín hiệu của xung
clock và bộ đếm sẽ không đếm. Và ngược lại
Là tín hiệu đầu vào xung clock.
Ở mỗi xung cạnh dương của xung 14 Clock
clock, giá trị bộ đếm được tăng thêm 1. 15 Reset
khởi động lại bộ đếm từ 0. 16 Vcc Chân cấp nguồn dương
2.1.2 Giải thích hoạt động của các chân
Các chân 1 đến 7 và 9 đến 11 là các chân đầu ra. Các chân này lần lượt
thay đổi thành mức cao (nối tiếp nhau) trong một trình tự. Đối với mỗi
tín hiệu đồng hồ, mỗi chân sẽ tăng cao trong một chuỗi.
Chân kích hoạt / ức chế đồng hồ (chân 13) hay còn gọi là chân Enable.
Chân kích hoạt để bật CD4017 IC. IC được bật khi chân hoạt động ở mức thấp.
Để tắt hoặc tắt IC, chân này phải được kết nối với đầu vào cao đang
hoạt động, khi chân này hoạt động ở mức cao, nó sẽ bỏ qua các tín hiệu xung nhịp. Chân đồng hồ (chân 14)
Tín hiệu đồng hồ được cung cấp đến chân thứ 14 chịu trách nhiệm cho đầu ra tuần tự.
Khi xung đồng hồ đầu tiên được phát hiện, chân 3 sẽ đi, đối với xung
đồng hồ tiếp theo, chân 2 sẽ lên cao, và một chuỗi được hình thành.
Điều quan trọng cần nhớ là, nếu chúng ta không kết nối bất kỳ tín hiệu
đồng hồ nào với chân đầu vào này, thì nó phải được kết nối với nguồn
điện áp dương hoặc âm.
Nó không được bỏ kết nối theo các quy tắc tiêu chuẩn đầu vào CMOS. 8 lOMoAR cPSD| 46884348
Chân đầu vào đồng hồ (chân số 14) chỉ đáp ứng với tín hiệu điện áp
dương hoặc đồng hồ dương Chân reset (chân 15)
Chân 13 là chân Kích hoạt đồng hồ gọi là chân Enable, được sử dụng
để điều khiển đồng hồ.
Khi ở mức logic “0”, đồng hồ sẽ được kích hoạt và bộ đếm tăng một
lần đếm cho mỗi xung đồng hồ.
Nhưng khi logic “1”, đầu vào đồng hồ bị dừng và bộ đếm sẽ không làm
gì ngay cả khi xung đồng hồ đến.
Chân 16 là nguồn cấp dương và chân 8 là chân tiếp đất gọi hai chân
này là chân cấp nguồn CD4017
Nguồn cung cấp dao động từ 3 volt đến 16 volt. Và điện áp nguồn tối
đa không được vượt quá 18 volt.
Chân 14 là đầu vào đồng hồ để kích hoạt một lần đế
Xung đồng hồ phải “sạch”. Nếu chúng “nhiễu ồn” thì bộ đếm có thể
tăng hai hoặc nhiều lần trong mỗi xung đồng hồ. Bộ đếm sẽ đếm trên
tín hiệu đồng hồ tích cực (sườn lên xung).
Chân 15 là chân đặt lại hay còn gọi là Reset.
Thực hiện đếm mức logic “0”, tương đương với nối chân này xuống
GND. Khi thực hiện logic “1”, bộ đếm được đặt lại thành “0”.
Các chân 1-7 và 9-11 là các chân đầu ra đã giải mã tương đương với
các số thập phân từ 0 – 9.
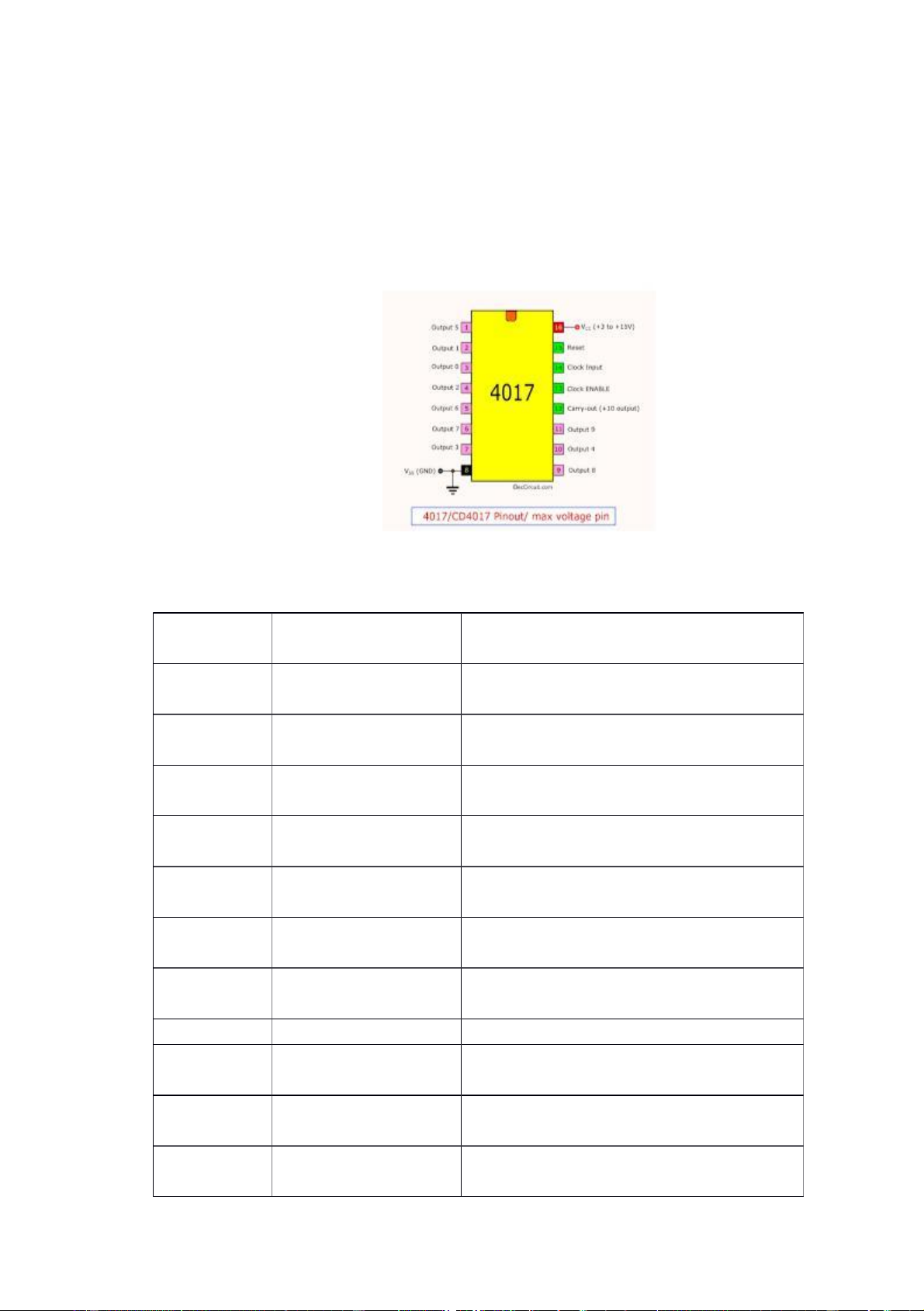
Hình 2: Sơ đồ hoạt động đếm đơn giản dùng IC CD4017 9 lOMoAR cPSD| 46884348
Trong quá trình đếm thì chỉ một đầu ra (các chân 1-7 và 9-11) ra duy
nhất là “Cao” “log gic 1” thì phần còn lại sẽ duy trì ở mức “Thấp” “logic 0”.
Như trên hình LED1 nằm ở đầu ra đầu tiên được dán nhãn là “0”, LED
nhãn “0” sẽ sáng ngay sau khi chúng ta sử dụng IC này làm bộ đếm số.
Khi bộ đếm tăng lên đến “9”, nếu có thêm một xung clock nữa nó sẽ
lặp lại về “0” một lần nữa
Chân 12 là Carry out nghĩa là chân này có mức logic 1, khi số đếm
vượt quá giá trị 10 và hữu ích cho việc kết hợp nhiều IC để tăng khả
năng bộ đếm lên hàng chục hàng trăm, hàng nghìn…. 2.2. TSOP1738
2.2.1 Khái niệm về TSOP1738
TSOP1738 là bộ thu tín hiệu IR với bộ khuếch đại hoạt động như một bộ
chuyển mạch và bộ chuyển đổi trong mạch. Có một đầu vào và đầu ra chỉ hoạt
động trên đầu vào tín hiệu IR. Chức năng của TSOP1738 là chuyển đổi tín hiệu
IR thành tín hiệu điện.
Mỗi bộ thu IR đều có một tần số đặc biệt để hoạt động. TSOP1738 hoạt
động ở tần số IR 38KHz. Trong trường hợp tần số cao hơn hoặc thấp hơn, nó có
thể hoạt động với dòng điện bị rò rỉ hoặc gặp một số lỗi khác và sẽ không hoạt động hoàn toàn.
Sử dụng công nghệ bán dẫn silicon, hoạt động ở cấp độ micro rất nhạy và
hiệu quả với các chức năng. Tóm lại, TSOP có kích thước nhỏ và việc sử dụng
với vi điều khiển và bộ vi xử lý làm nó trở nên thông minh và an toàn.
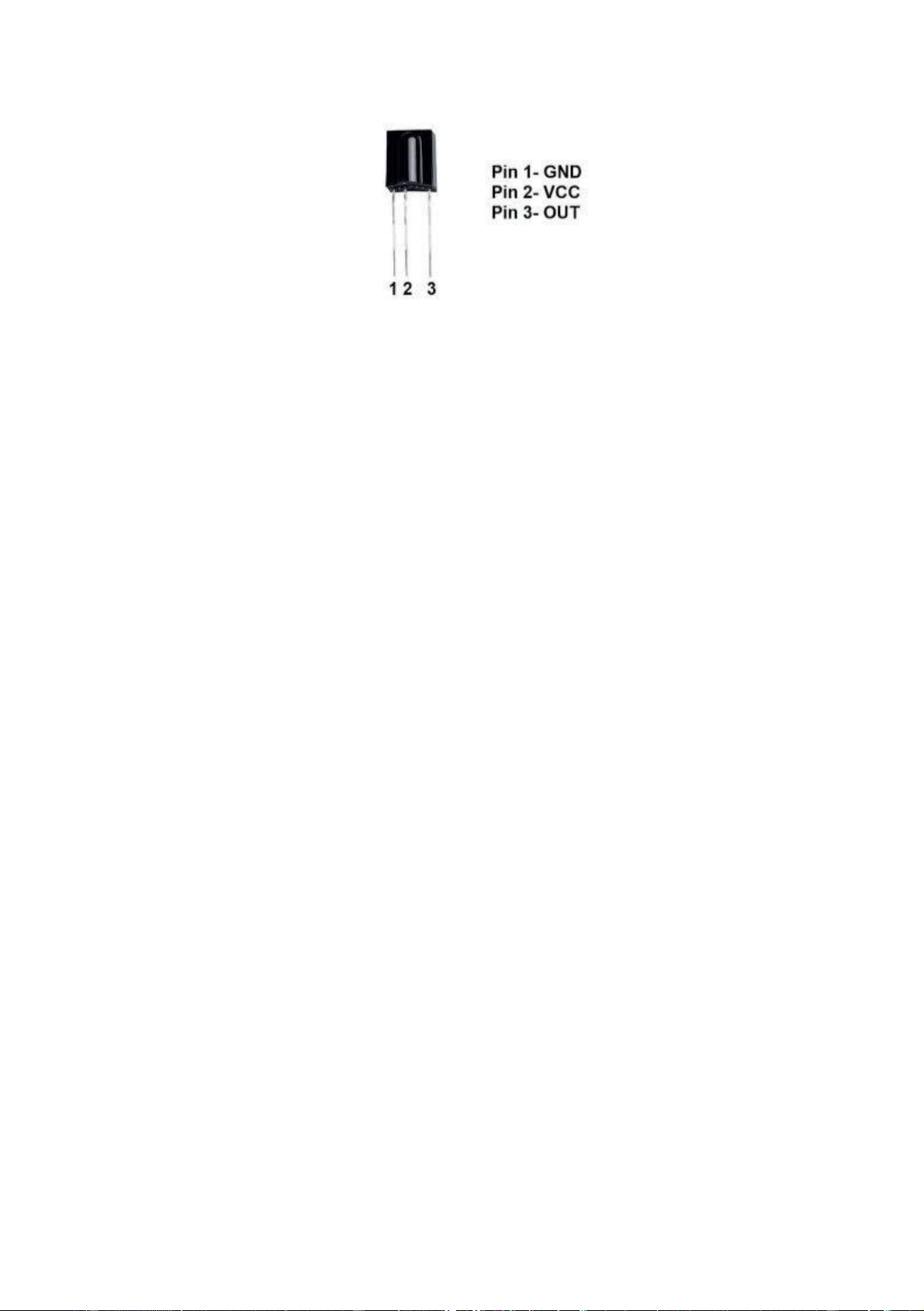
2.2.2 Sơ đồ chân TSOP1738
TSOP1738 là một bộ thu tín hiệu IR hoạt động như một công tắc. Nó chỉ
có ba chân kết nối TSOP với các thiết bị khác và cho giao tiếp dữ liệu không dây. 10 lOMoAR cPSD| 46884348
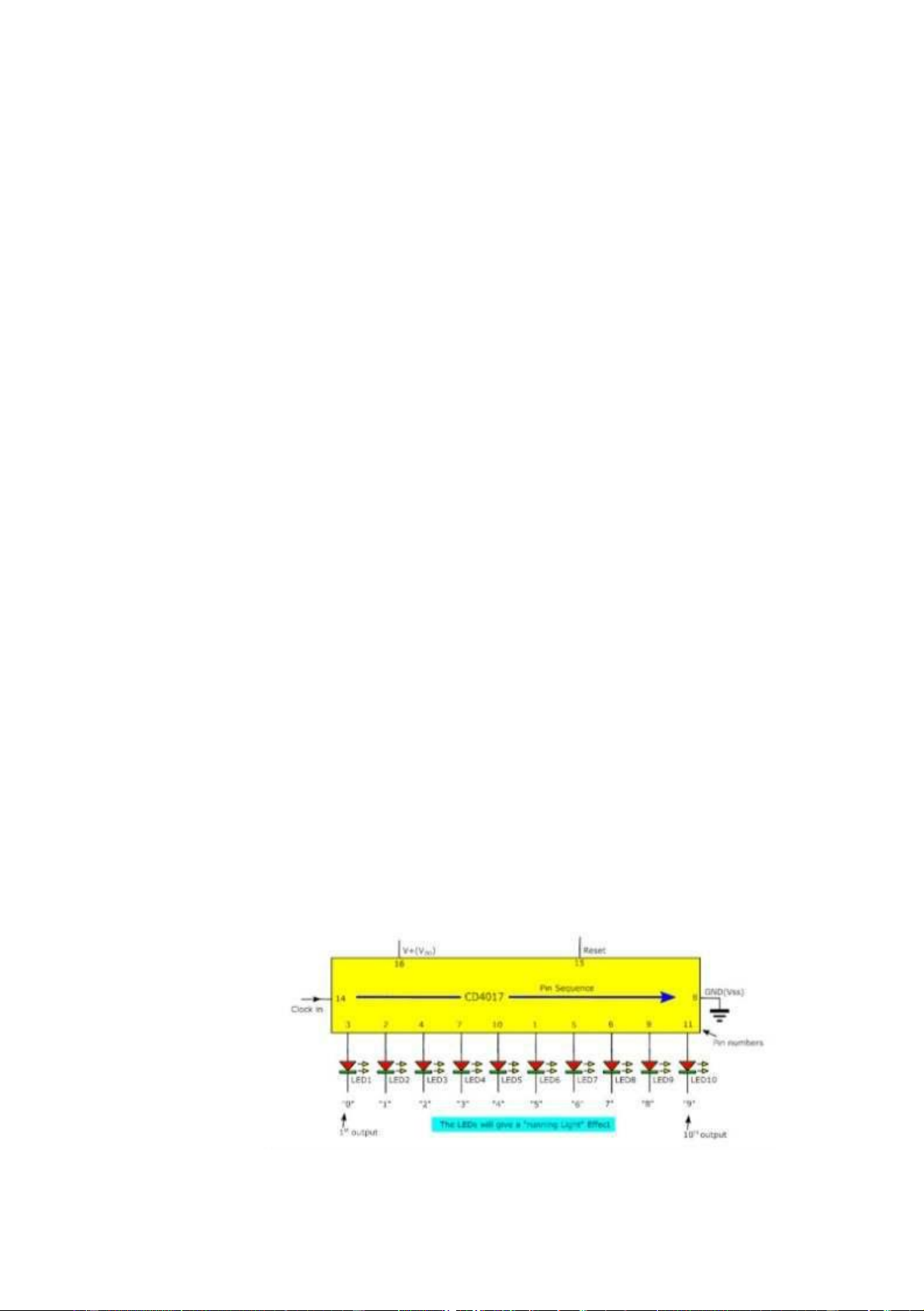
Hình 3. Sơ đồ chân TSOP1738
GND: Chân nối đất làm điểm mass chung với các thiết bị khác, đặc biệt
là vi điều khiển và IC.
VSS: Là chân đầu vào cấp nguồn để kích hoạt bộ giải mã bên trong và
bộ thu IR. Nguồn điện phải theo đặc tính kỹ thuật và chỉ nên cấp ở chân
nguồn. Trong trường hợp đầu vào nguồn điện cấp sai chân và ngay cả
có giá trị thấp, thì IC sẽ bắt đầu nóng lên mà bạn có thể nhận thấy bằng
cách chạm vào nó. Cuối cùng, việc đốt nóng sẽ làm hỏng TSOP.
Output: Dữ liệu sẽ xuất ra dưới dạng xung. Chân đầu ra có thể giao tiếp
với các thiết bị chuẩn logic TTL / CMOS có điện trở nhỏ. Dữ liệu đầu ra sẽ ở dạng điện áp.
2.2.3 Các tính năng của bộ thu tín hiệu IR TSOP1738
Có bộ thu tín hiệu và bộ khuếch đại IR trong cùng một package duy nhất.
Mức tần số đặc biệt hoạt động với một thiết bị cụ thể.
TSOP1738 có bộ lọc bandpass bên trong để tránh ánh sáng xung quanh,
đặc biệt là ánh sáng mặt trời.
Bộ lọc bên trong cung cấp tần số PCM cho các tín hiệu analog.
Có thể sử dụng được với các vi điều khiển, IC hoặc vi xử lý chuẩn TTL / CMOS. 11 lOMoAR cPSD| 46884348
Có nhiều tính năng nhưng vi mạch vẫn có mức tiêu thụ điện năng thấp
và việc tiêu thụ điện năng chỉ xảy ra khi nó đang hoạt động. Ở trạng thái
ngủ, mức tiêu thụ điện năng trở nên thấp hơn.
TSOP1738 có tốc độ truyền 1200bits / s và có thể nhận dữ liệu với tốc độ tương tự.
Đầu ra hoạt động ở mức thấp
2.2.4 Thông số kỹ thuật
Điện áp hoạt động TSOP là từ -0.3 đến 6.0 V và dòng điện động
5mA. Điện áp và dòng điện đầu ra sẽ luôn theo nguồn điện đầu vào.
Phạm vi nhiệt độ tiếp giáp bên trong là 100 ⁰C.
Nhiệt độ hoạt động từ -25 đến 85 ⁰C
Công suất tiêu thụ là 50mW ở nhiệt độ tối đa là 85 ⁰C.
Trong quá trình hàn, IC luôn giữ nhiệt độ thấp hơn 260 ⁰C gần các chân
của nó nếu không nó sẽ bị cháy do nhiệt độ bên ngoài trong quá trình hàn.
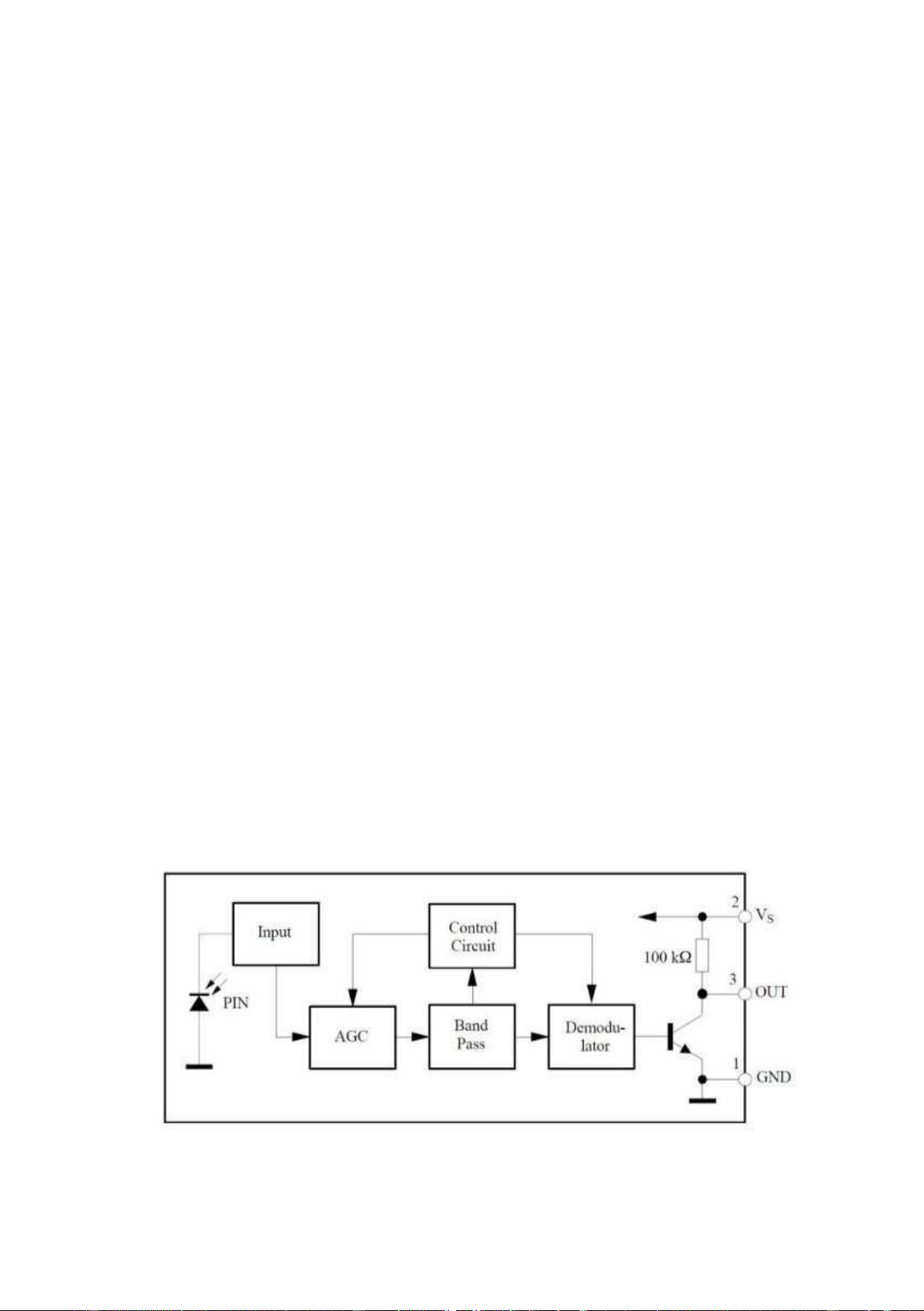
2.2.5 Nguyên lý hoạt động bộ thu tín hiệu IR
Hình ảnh cho trước là sơ đồ khối tổng quát của các thành phần bên trong
TSOP1738. Chi tiết của mọi thành phần được thảo luận dưới đây:
Hình 4. Sơ đồ khối tổng quát TSOP1738 12 lOMoAR cPSD| 46884348
AGC: Từ sơ đồ khối có thể thấy rõ các thành phần bên trong nhưng
ở đây việc sử dụng từng thành phần là có lý do. Bộ thu IR có thể hoạt
động trực tiếp nhưng trong TSOP các thành phần khác làm cho nó trở
nên thông minh và an toàn. Đầu tiên IR được kết nối với bộ AGC (Kiểm
soát độ lợi tự động). AGC khuếch đại đầu vào của các tín hiệu đầu vào
khác nhau từ bộ thu IR. Sau đó AGC chuyển đầu ra tới bộ lọc Bandpass.
Bộ lọc băng thông (Bandpass filter): Bộ lọc bandpass có nhiều vai
trò trong TSOP. Đầu tiên, nó chuyển đổi tín hiệu analog sang đầu ra
digital, sau đó chuyển đến bộ giải mã. Sự kết hợp giữa AGC và bộ lọc
bandpass cũng làm nó tránh được mọi ánh sáng xung quanh, đặc biệt là
ánh sáng mặt trời. Thiết bị có bảo vệ ánh sáng mặt trời bên trong nhưng
vẫn được công ty khuyến nghị nên sử dụng ở khoảng cách ngắn. Sự
thay đổi của thời tiết và ánh sáng mặt trời đôi khi có thể ảnh hưởng đến
việc truyền tải tín hiệu bằng TSOP. Bộ lọc bandpass cũng làm cho vi
mạch chỉ hoạt động ở một tần số đặc biệt là 38KHz.
Bộ giải mã : Bộ giải mã được kết nối với transistor NPN ở một đầu
và mắc với bộ lọc bandpass ở đầu kia. Dữ liệu đầu ra từ bộ lọc bandpass
sẽ được đưa vào bộ giải mã sẽ điều khiển transistor NPN sử dụng tín
hiệu đầu vào thấp. Transistor NPN được kết nối trực tiếp với nguồn với
đầu ra cực collector và cực emitter được nối mass. Mỗi tín hiệu logic
thấp sẽ tắt transistor NPN và nguồn điện sẽ được đưa tới chân đầu ra.
Mạch điều khiển: Mạch điều khiển hoạt động như một công tắc cho
bộ giải mã và bộ lọc bandpass. Nó tạo ra tín hiệu đầu ra bất cứ khi nào
bộ lọc bandpass tạo ra tín hiệu đầu ra, mạch điều khiển tạo tín hiệu đầu
ra thông báo cho bộ giải mã và AGC khi hoàn thành quá trình lọc tín hiệu. 2.2.6 13 lOMoAR cPSD| 46884348
CHƯƠNG 3: SẢN PHẨM MẠCH THỰC
TẾ 3.1 Mạch nguyên lý
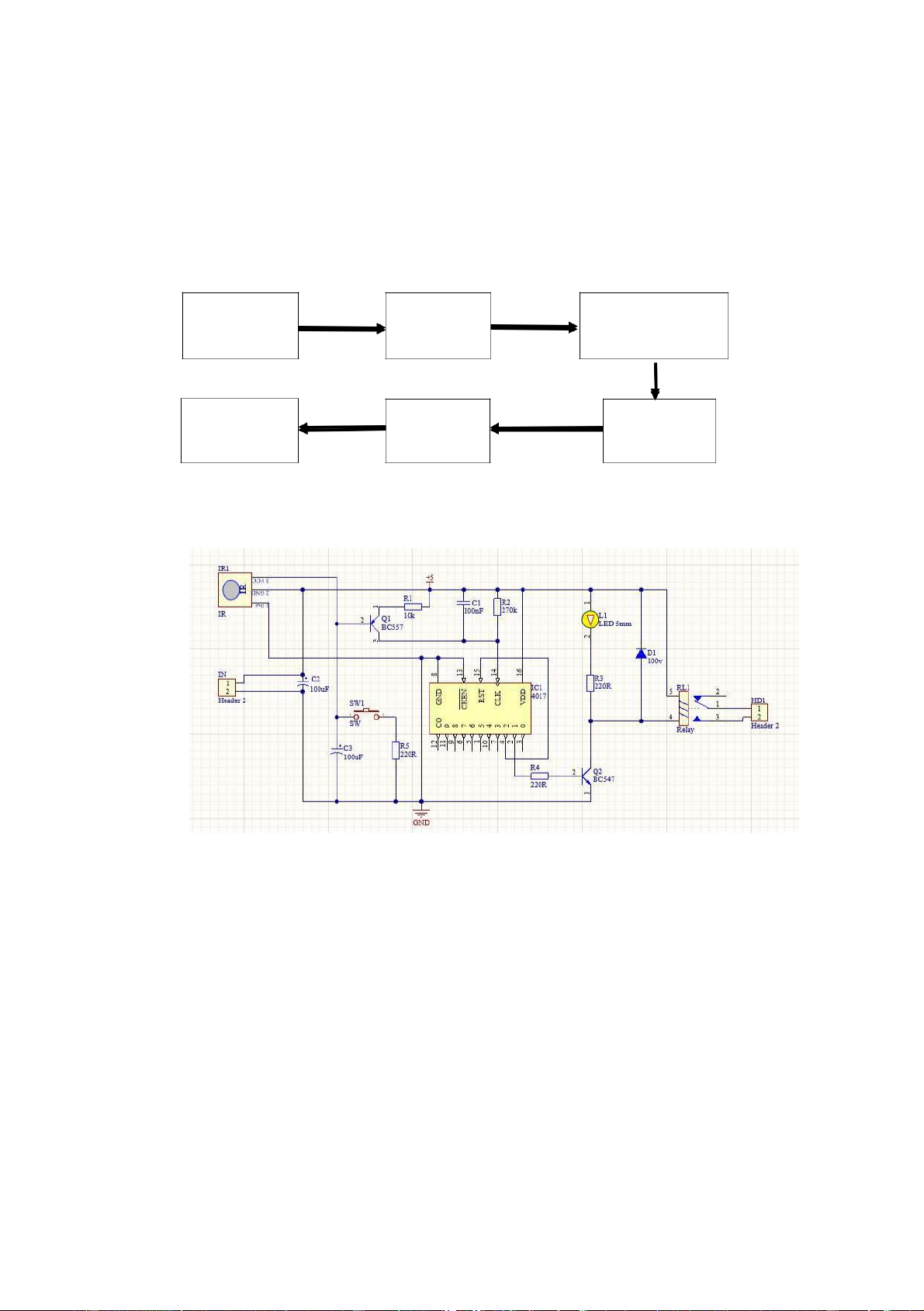
3.1.1 Sơ đồ khối tổng quát Cảm Bộ x Remote ử lý (IC biếến IR CD4017) Thiết bị LED đi Relay ện tử
3.1.2 Mạch nguyên lý
Hình 6. Mạch nguyên lý
3.1.3 Tác dụng linh kiêṇvà nguyên lý hoạt đông ̣
3.1.3.1. Tác dụng linh kiện
Remote: tín hiệu IR được phát ra từ remote để điều khiển mạch.
TSOP1738: Nhận tín hiệu hồng ngoại
LED: được sử dụng để hiển thị trạng thái của mạch, ví dụ như cho biết
mạch đang hoạt động hay không.
Transistor: được sử dụng để kích hoạt Relay. 14 lOMoAR cPSD| 46884348
Relay: được sử dụng để điều khiển các thiết bị điện tử như đèn, quạt,
máy lạnh, TV, và các thiết bị khác.
3.1.3.2. Nguyên lý hoạt động.
Tín hiệu sau khi khuếch đại, đi qua bộ lọc C1 + R2 để được đưa đến
chân 14(clk- chân nhận tín hiệu vào).
IC 4017 hoạt động như sau: khi nhận tín hiệu tại chân clk thì tại đầu ra
của 4017 (chân 2) sẽ xuất hiện 1 xung dương, sau mỗi lần nhận tín hiệu
thì tại ngõ ra sẽ có 1 ngõ lên mức dương tuần tự từ 0-9.
Đối với mạch này chân 2 là chân tín hiệu của 4017 được đưa đến
BC547 để điều khiển Relay. Còn chân 4 được nối đến chân 15 (reset).
Ban đầu led tắt khi chưa bấm remote hoặc switch, mạch không có tín
hiệu. Sau khi bấm mạch nhận được tín hiệu tại chân C của BC557 thì
chân 2 sẽ lên mức dương làm cho transistor BC547 dẫn, dẫn tới relay
đóng và thiết bị hoạt động.
Sau đó tại chân clk nhận thêm, ngõ ra chân 2 sẽ chuyển lên chân 4, lúc
này chân 4 nối reset nên 4017 reset làm led tắt.
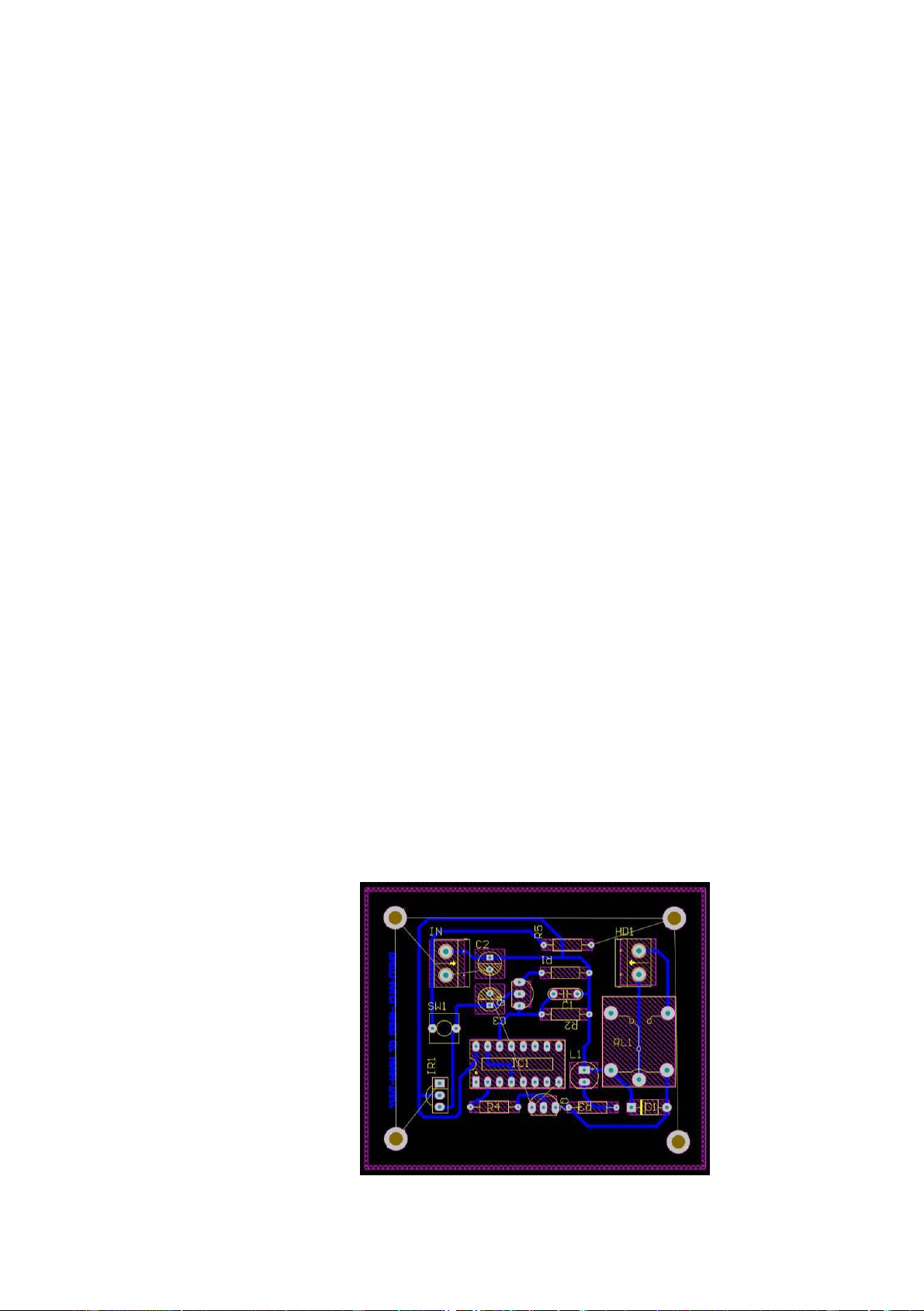
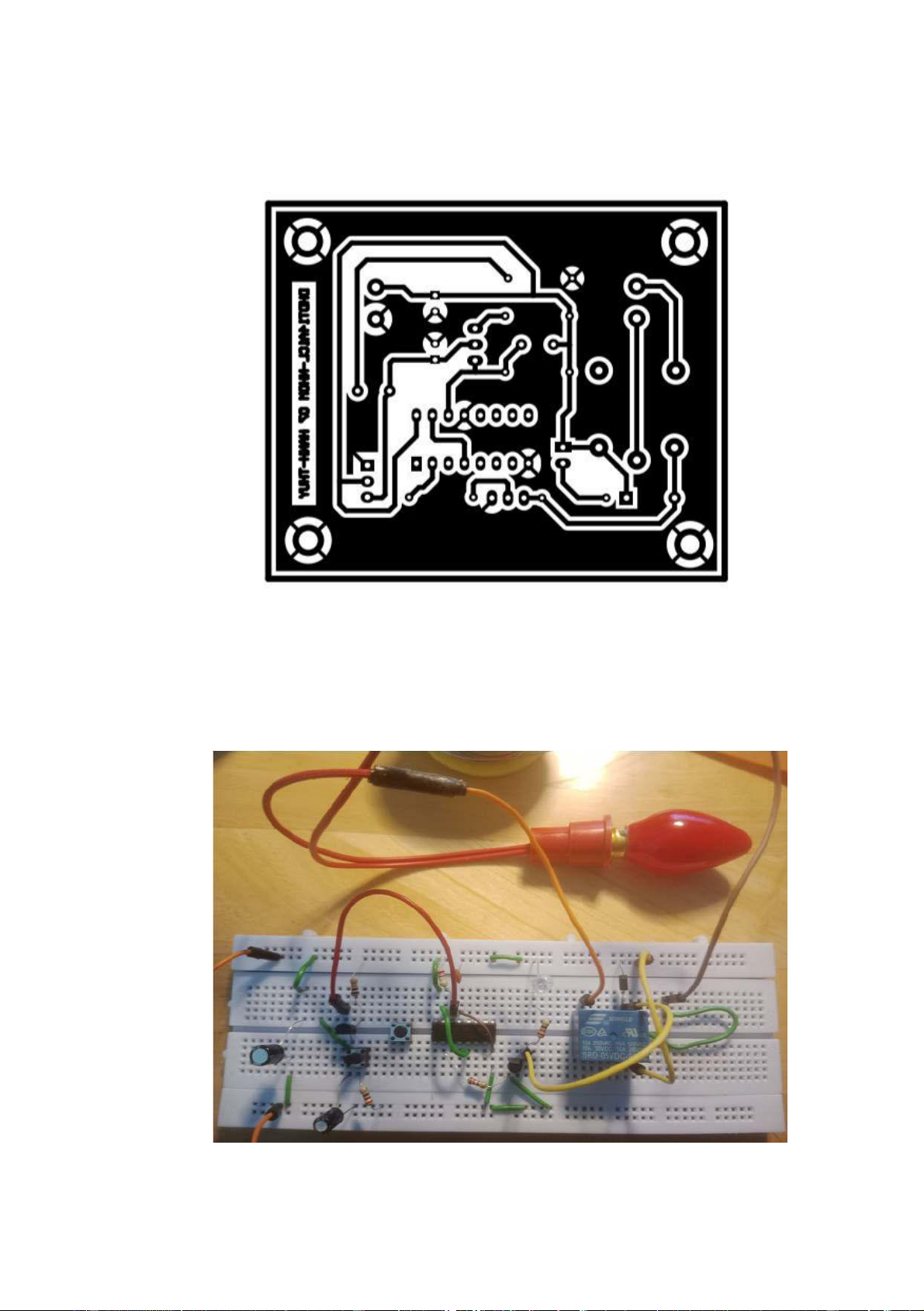
3.2 Mạch layout (PCB)
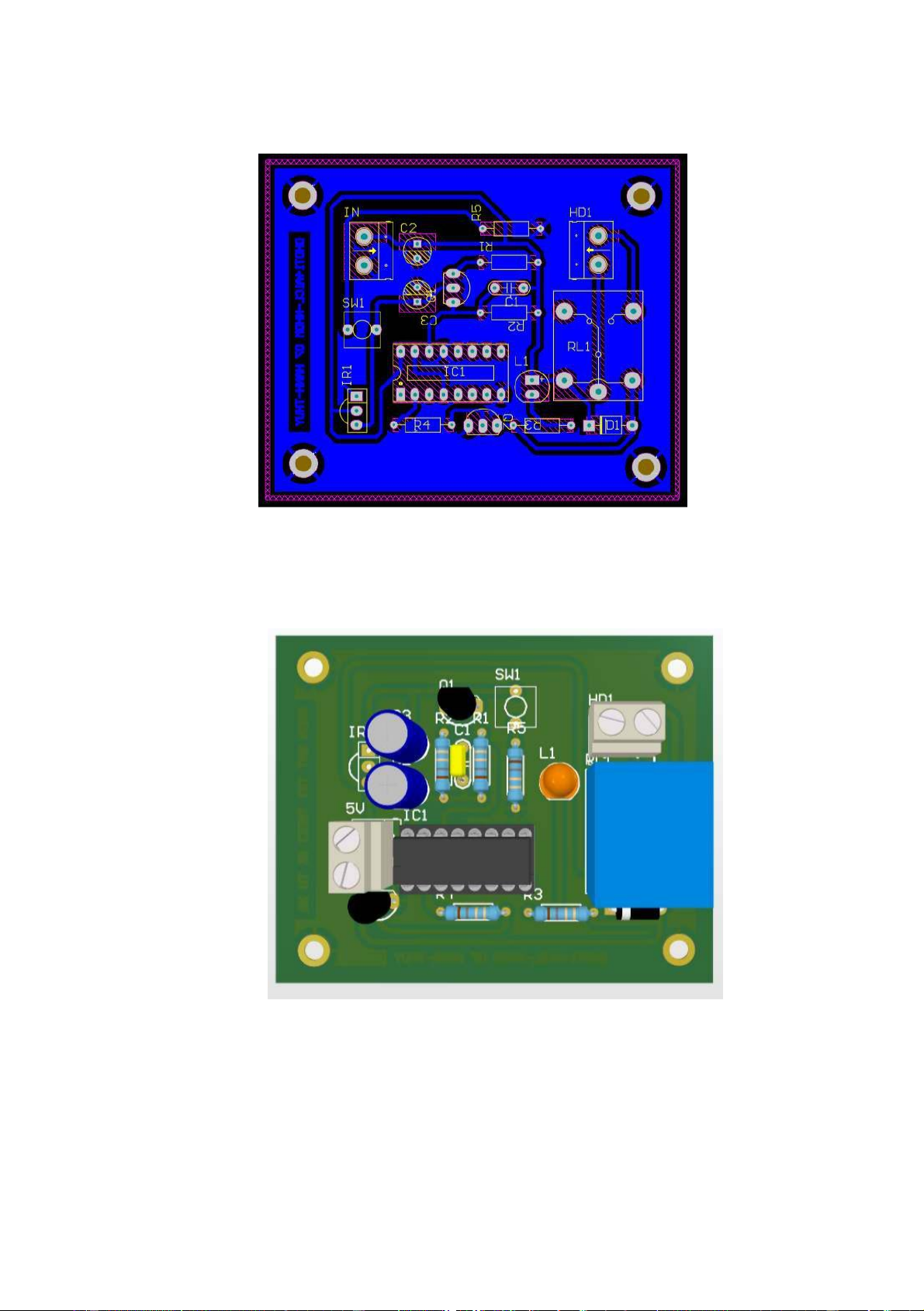
3.2.1 Sơ đồ đi dây Hình 7. Sơ đồ đi dây 15 lOMoAR cPSD| 46884348 3.2.2 Mạch layout Hình 8. Mạch layout 3.2.3 Mô phỏng 3D
Hình 9. Mô phỏng 3D 16 lOMoAR cPSD| 46884348 3.2.4 File mạch in Hình 10. Mạch in
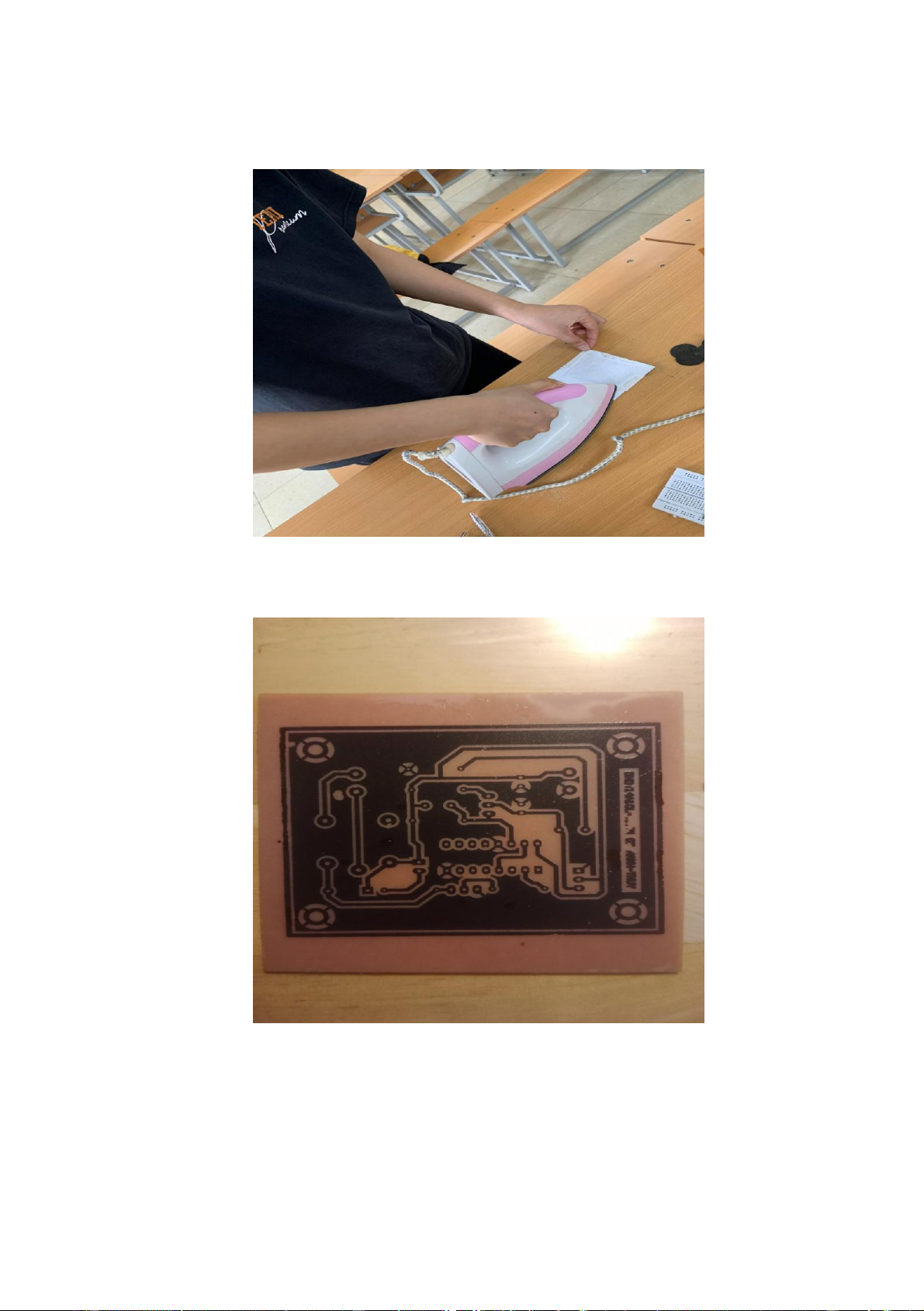
3.3 Hình ảnh thực tế quá trình làm sản phẩm thực tế Test trên bo trắng
- Tiến hành làm mạch 17 lOMoAR cPSD| 46884348
Bước 1: Cắt phíp đồng và là mạch in Bước 2: Ăn mòn 18 lOMoAR cPSD| 46884348
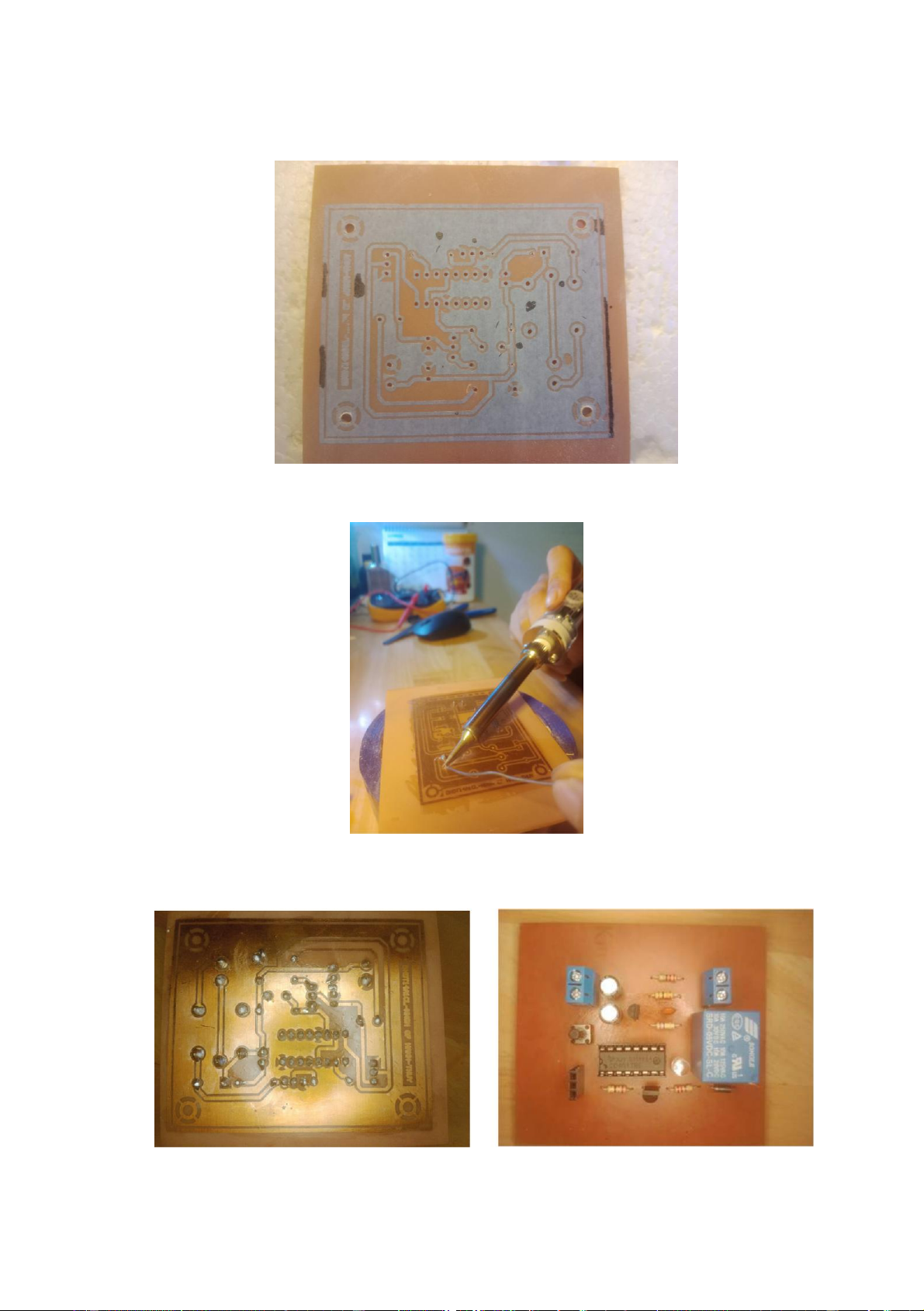
Bước 3: Tẩy mạch bằng aceton và khoan lỗ Bước 4: Hàn mạch
- Sản phẩm sau khi hàn 19 lOMoAR cPSD| 46884348
3.4 Môṭsố sự cố và cách khắc phục
- Chọn sai loại trasistor trong phần mềm altium
Cách khắc phục: Phải thiết kế lại, xem thứ tự chân linh kiện, đổi vị trí chân.
- Hàn quá 1 mối quá lâu dẫn đến chết linh kiện
Cách khắc phục: Giảm nhiệt độ mũi hàn, chỉ để vừa đủ là C và hàn nhanh tay
- Lắp sai chân transistor, IC
Cách khắc phục: Khi hàn lên dùng đế để cắm transistor, IC. Tránh để sai phải
tháo ra nhiều lần, dẫn đến chết linh kiện. 20
Tài liệu liên quan:
-

Đề cương ôn tập Mạng truyền thông di động | Trường Đại học Kinh tế kỹ thuật công nghiệp
4 2 -

Bài 2. mạng lan ảo và định tuyến rip | Đại học Kinh tế Kỹ thuật Công nghiệp
236 118 -

Giáo trình NS-2 | Đại học Kinh tế Kỹ thuật Công nghiệp
362 181 -

Đề tài phân tích thiết kế mạng | Đại học Kinh tế Kỹ thuật Công nghiệp
333 167 -

LẮP ĐẶT MÔ HÌNH TỦ ĐIỆN ĐIỀU KHIỂN | Đại học Kinh tế Kỹ thuật Công nghiệp
267 134