BÁO CÁO ĐỒ ÁN LIÊN MÔN 2 ĐỀ TÀI: Thiết kế hệ thống điều khiển truyền động điện cho động cơ 3 pha không đồng bộ môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵn
❖ Yêu cầu: -
Thiết kế một một hệ thống điều khiển truyền động điện cho động cơ
(được gắn với cơ cấu truyền động và tải) sao cho đúng yêu cầu của tải
đã nêu. Như vậy việc thiết kế gồm 2 phần, phần mạch động lực gắn với động cơ và phần mạch điều khiển để điều chỉnh tốc độ theo yêu cầu.
BÁO CÁO ĐỒ ÁN LIÊN MÔN 2 ĐỀ TÀI: Thiết kế hệ thống điều khiển truyền động điện cho động cơ 3 pha không đồng bộ môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
Tài liệu gồm 25 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:




Preview text:
TRƯỜNG ĐẠI HỌC BÁCH KHOA – ĐHĐN KHOA ĐIỆN
BÁO CÁO ĐỒ ÁN LIÊN MÔN 2
ĐỀ TÀI: Thiết kế hệ thống điều khiển truyền động điện cho
động cơ 3 pha không đồng bộ
GVHD: TS. Nguyễn Khánh Quang SVTH: Lê Hồng Phúc Võ Quang Hải Trần Bảo Lưu Thái Hữu Quang Lớp: 21TDH2
Ngành: Kĩ thuật điều khiển và tự động hóa Nhóm:
CHƯƠNG 1. GIỚI THIỆU BÀI TOÁN, TÍNH TOÁN THIẾT KẾ
PHẦN ĐỘNG LỰC I. Bài toán:
Các số liệu ban đầu: -
Nguồn điện xoay chiều 3 pha 220/380 V. -
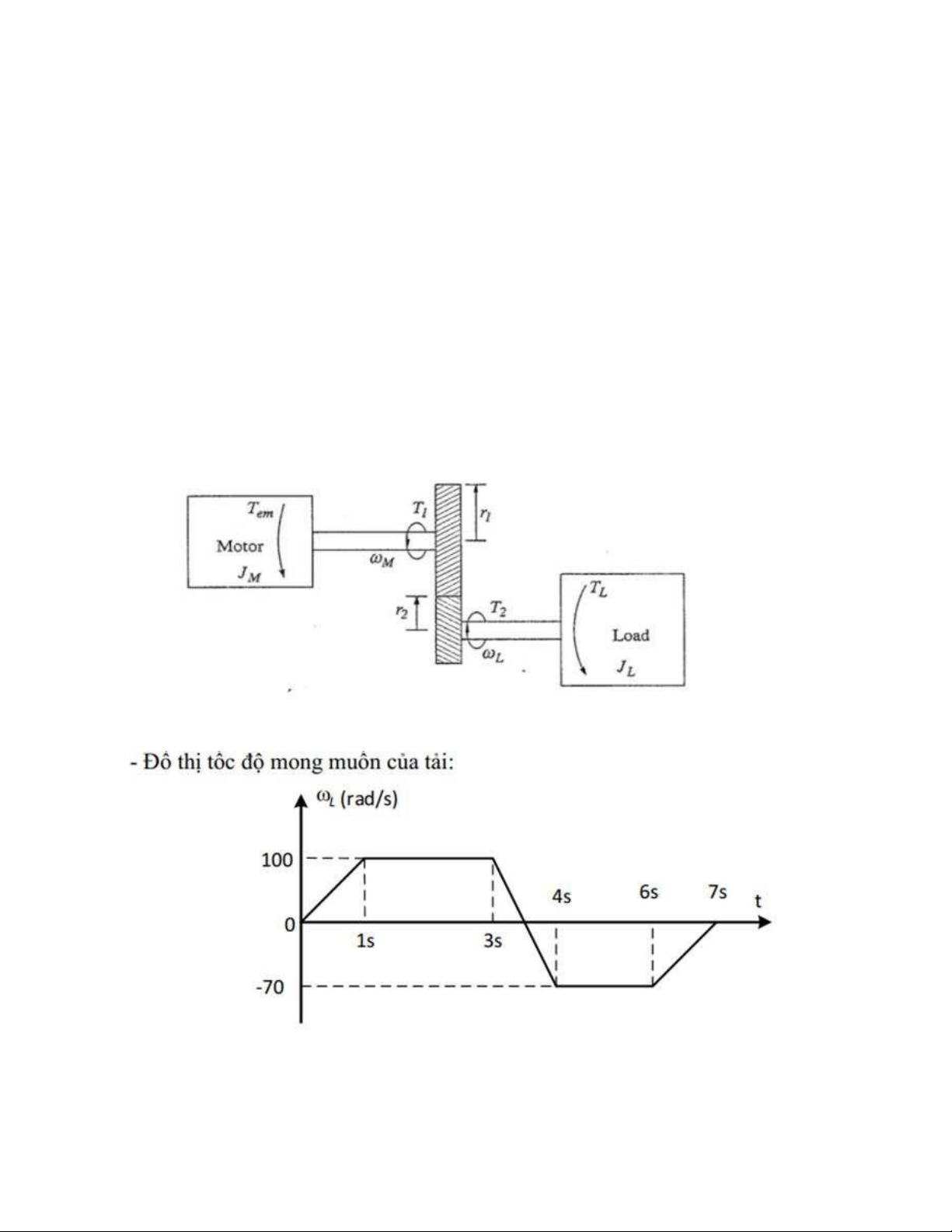
Tải của hệ thống truyền động điện được cho như hình vẽ với: r1/r2 = 6;
TL= 10 Nm; J L = 0.5 kg.m2
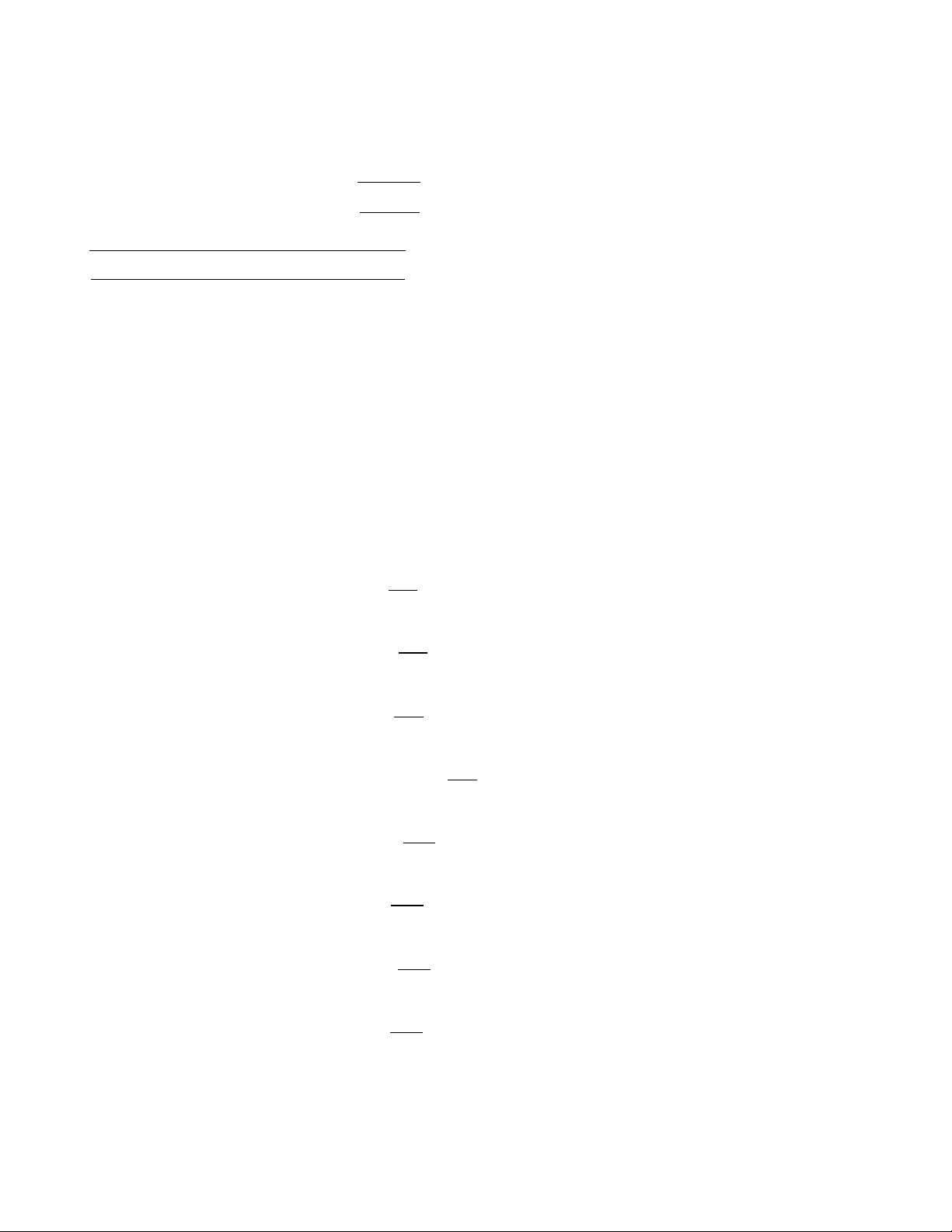
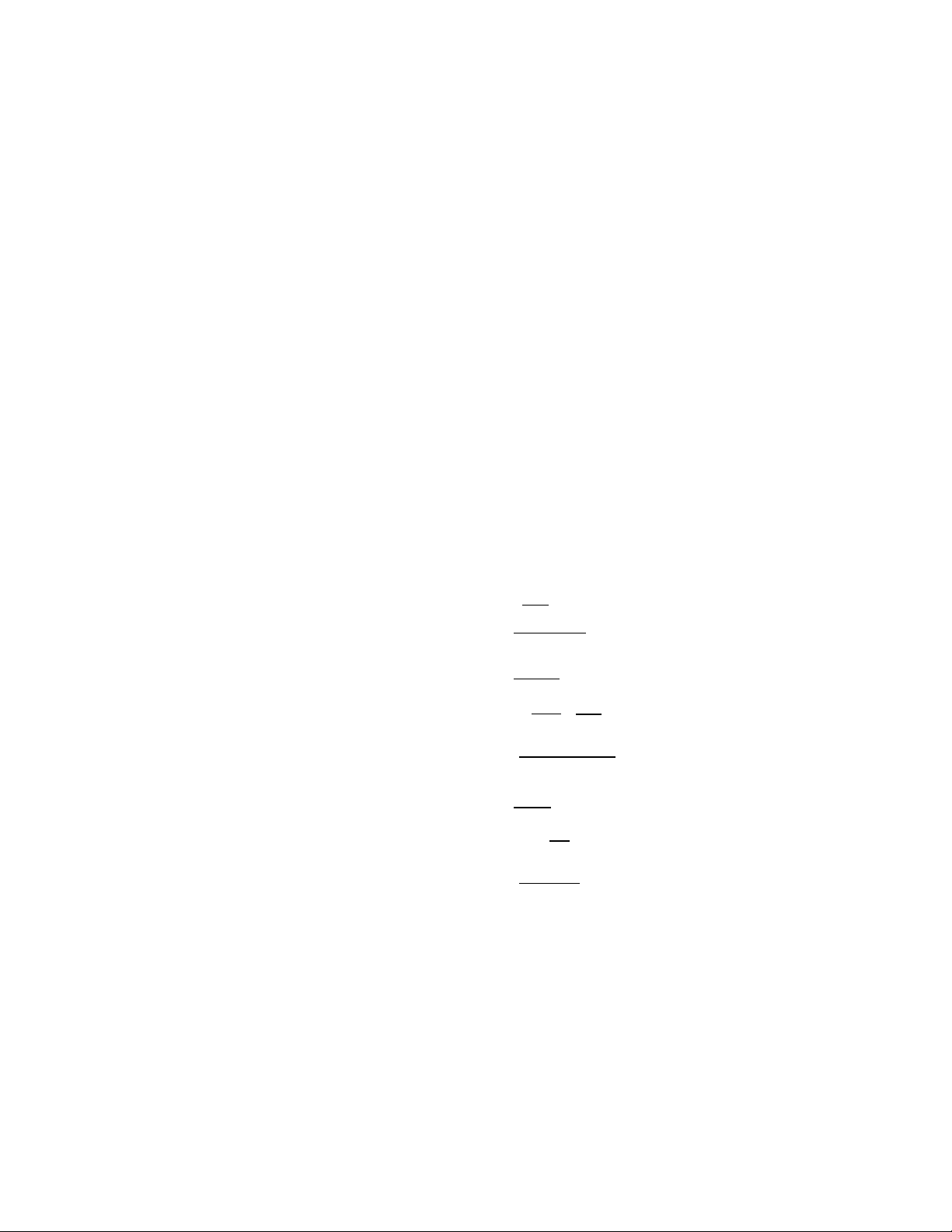
Hình 1.1 Đồ thị tốc độ mong muốn của tải
Dựa vào yêu cầu bài toán (hình 1.1), tốc độ của tải theo miền thời gian như sau: •
Giai đoạn 1: động cơ khởi động, quay với tốc độ của tải là từ 0 tới 100 rad/s trong vòng 1s •
Giai đoạn 2: khi tải đã chạy với tốc độ 100 rad/s thì cho động cơ giữ nguyên
tốc độ đó trong 2s ( từ 1s đến 3s ). •
Giai đoạn 3: từ giây thứ 3 ta cho động cơ bắt đầu giảm tốc độ quay từ 100
rad/s về 0 rad/s rồi tiến hành đảo chiều quay, tăng tốc độ quay nghịch từ 0
rad/s lên 70 rad/s. Quá trình bắt đầu giảm tốc độ đến khi đạt 70 rad/s theo
chiều nghịch là 1s ( từ 3s đến 4s ). •
Giai đoạn 4: khi động cơ quay nghịch với tốc độ 70 rad/s thì cho động cơ giữ
nguyên tốc độ đó trong vòng 2s ( từ 4s đến 6s ) •
Giai đoạn 5: tại giây thứ 6, cho dừng động cơ, thời gian từ lúc quay ngược 70
rad/s đến lúc dừng hẳn (0 rad/s) là 1s.
* Nhận xét về bài toán: ❖ Yêu cầu:
- Thiết kế một một hệ thống điều khiển truyền động điện cho động cơ
(được gắn với cơ cấu truyền động và tải) sao cho đúng yêu cầu của tải
đã nêu. Như vậy việc thiết kế gồm 2 phần, phần mạch động lực gắn với
động cơ và phần mạch điều khiển để điều chỉnh tốc độ theo yêu cầu.
❖ Hướng giải quyết bài toán:
- Đầu tiên, dựa vào những thông số cho trước từ tải, ta tính toán và phân
tích cấu trúc phần mạch động lực. Sau đó xây dựng mô tả toán học của hệ thống.
- Tiếp theo, xây dựng cấu trúc phần điều khiển, lựa chọn thuật toán điều
khiển thích hợp và tính toán xác định các tham số của thuật toán điều khiển
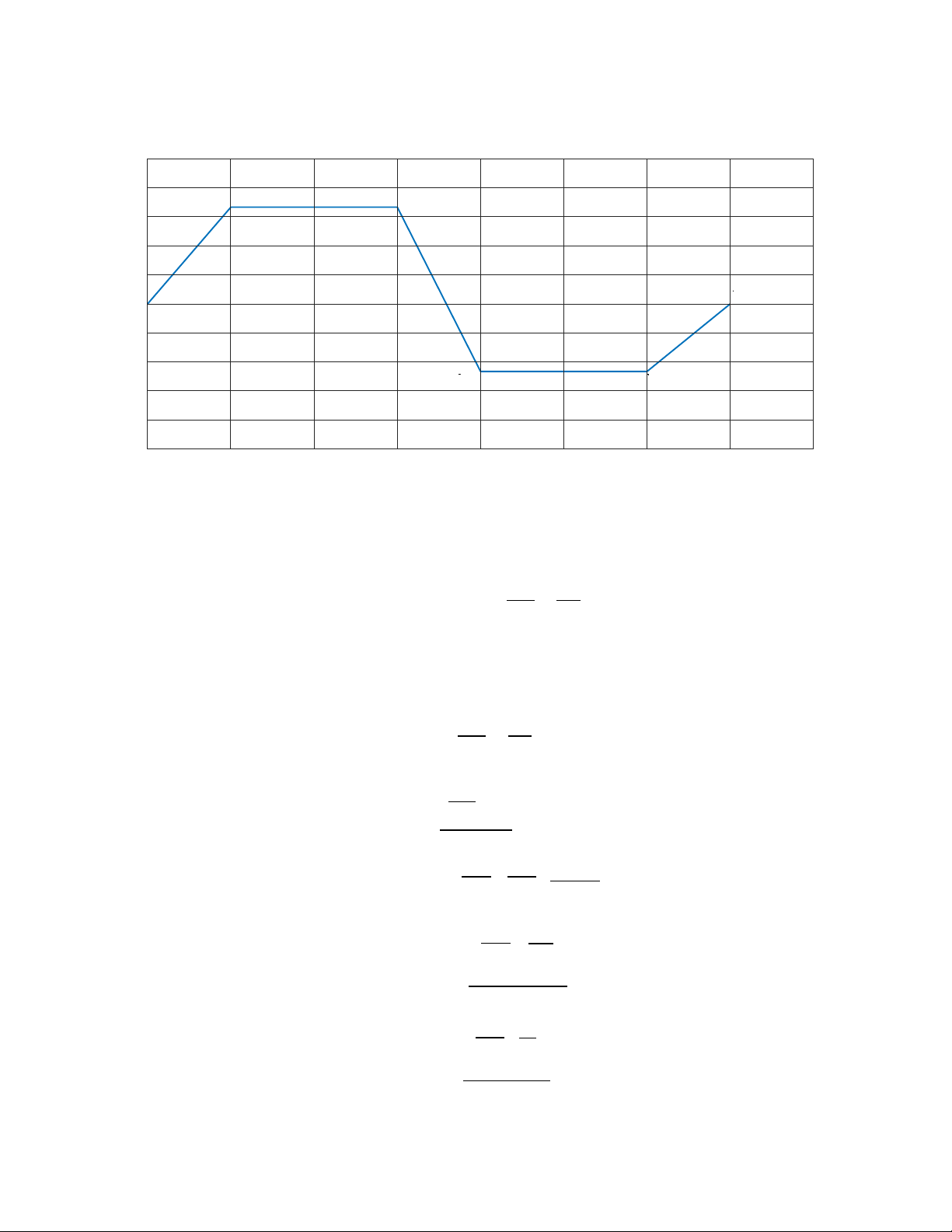
II. Tính toán và lựa chọn động cơ 25 20 100/ 6 100/6 15 10 5 ) s 0 ad/ 0 (r ω -5 -10 -70/ 6 -70/6 -15 -20 5 1 2 3 4 5 6 7 Hình1.2 Đồ T(s)
thị tốc độ
của động cơ.
Ta có các công thức tính toán: d w T =( J wm L +J *¿)* + ∗T (1.1) em M l dt wm L
Chưa chọn được động cơ nên bỏ qua J =0 m ( Jm ): Suy ra: d w T =¿ J wm L *¿* + ∗T (1.2) em L dt wm L ➢ ( 100 −0 )
Từ 0(s) đến 1(s): T 6 em= 0.5*62* + 6*10 = 360 (N.m) (1−0 ) ➢ 100 100
Từ 1(s) đến 3(s): : T = 0.5*62* − ¿ ¿ + 6*10 = 60 (N.m) em 6 6 (3−1) −70 – 100 ➢ ( )
Từ 3(s) đến 4(s): : T 6 6 em = 0.5*62* + 6*10 = -450 (N.m) (4−3 ) −70 + 70 ➢ ( )
Từ 4(s) đến 6(s): : T 6 6 em= 0.5*62* + 6*10 = 60 (N.m) (6−4 ) ➢ 6
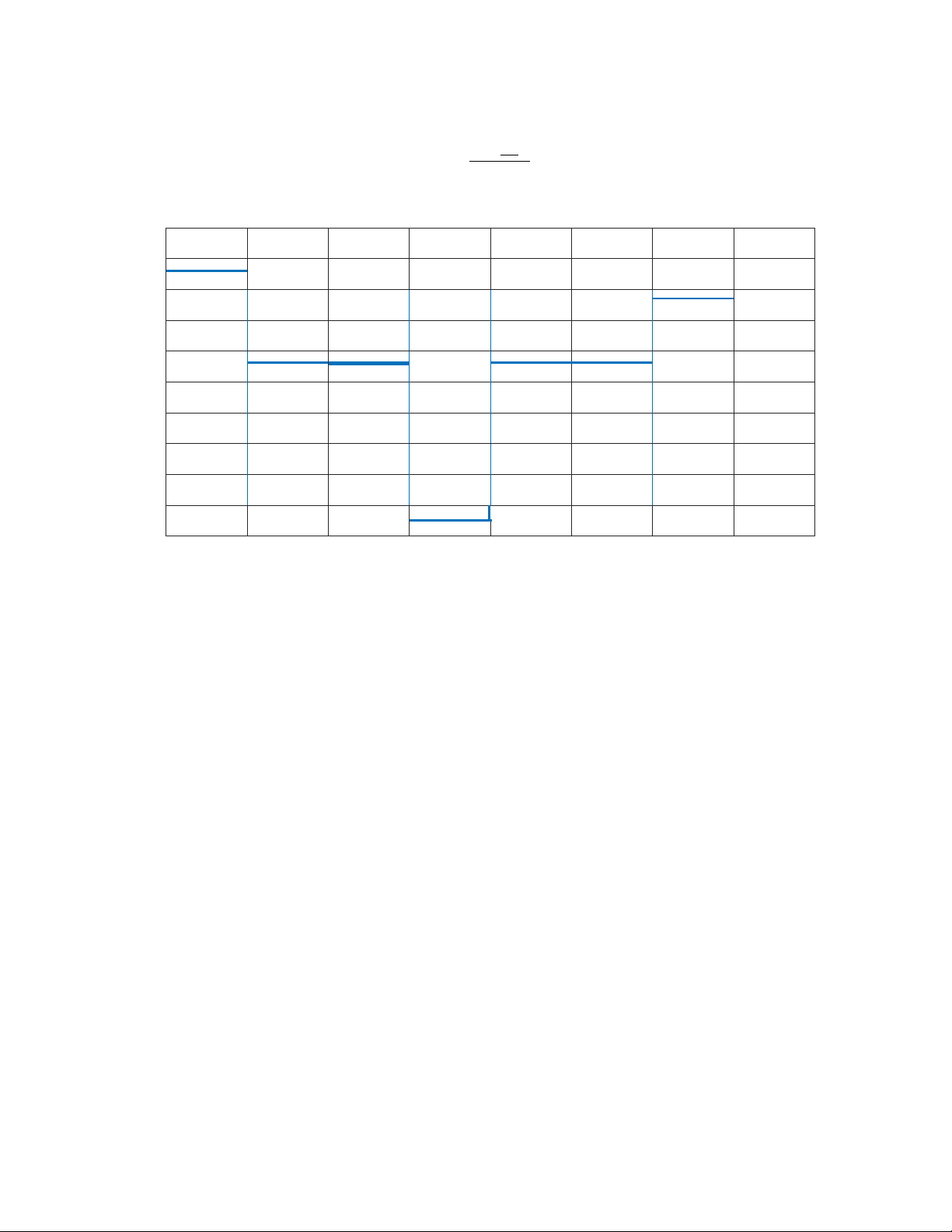
Từ 6(s) đến 7(s): : T + 6*10 = 270 (N.m) em=¿0.5*62* (0+ 70 ) ( 4−3) 500 400 360 270 300 27 0 200 ) 100 m. 60 60 N 60 60 ( 0 m e T -100 00 300 400 -450 -450 -500 1 2 3 4 5 6 7 T(s)
Hình 1.3 Đồ thị momen động cơ. Monmet đẳng trị: ∑ T 2 .t (1.3) Tdt= ∑ t √ 3602 Tdt
∗1+ 602∗2+(−450)2 +602∗2+2702∗1 = = 244,78 (N.m) 7 √
Chọn hệ số dự trữ Kdt = 1,25. Suy ra:
T = Tdt * 1.25 = 244.78*1.25 = 305.975 (N.m) Công suất động cơ: P=ω . T m em (1.4)
1. Tại t = 0 (s): P = ωm. Tem = 360*0= 0 (KW)
2. Tại t = 1 (s): P = ω . T m em = 100 6 * 360 = 6 (KW) P = ω . T m em = 100 *60 = 1 (KW) 6
3. Tại t = 3(s): P = ω . T m em = 100 6 *60 = 3,6(KW) P = ω . T m
em = -450* 100 = -7.5 (KW) 6
4. Tại t = 4(s): P = ω . T = ( −70 ¿∗450= 5.25 (KW) m em 6 P = ω . T = −70 * 60= -0.7 (KW) m em 6
5. Tại t = 6(s): P = ω . T = −70 *60 = -0.7 (KW) m em 6 P = ω . T = −70 *270= -3.15 (KW) m em 6
6. Tại t = 7(s): P = ωm. Tem= 270*0 = 0 (KW) 8 6 6 5.75 4 2 ) w 1 1 0 K 0 ( P -0 7 -0.7 -2 4 -3.15 6 -7.5 -8 0 1 2 3 4 5 6 7 8 T(s)
Hình 1.4 Đồ thị công suất động cơ
Công suất đẳng trị:
Pdt =√∑ ¿¿¿¿ (1.5)
=√62∗1+12∗2+(−7.5 )2 0.5+5.752∗0.5+(−0.7 )2 2+(−3.15)2 1 ∗ ∗ ∗ 7 = 3.66 (KW)
Chọn hệ số dự trữ động cơ Kdt = 1,25, ta có:
Pdc = Pdt * 1,25 = 3.66*1,25 = 4.575 (kW).
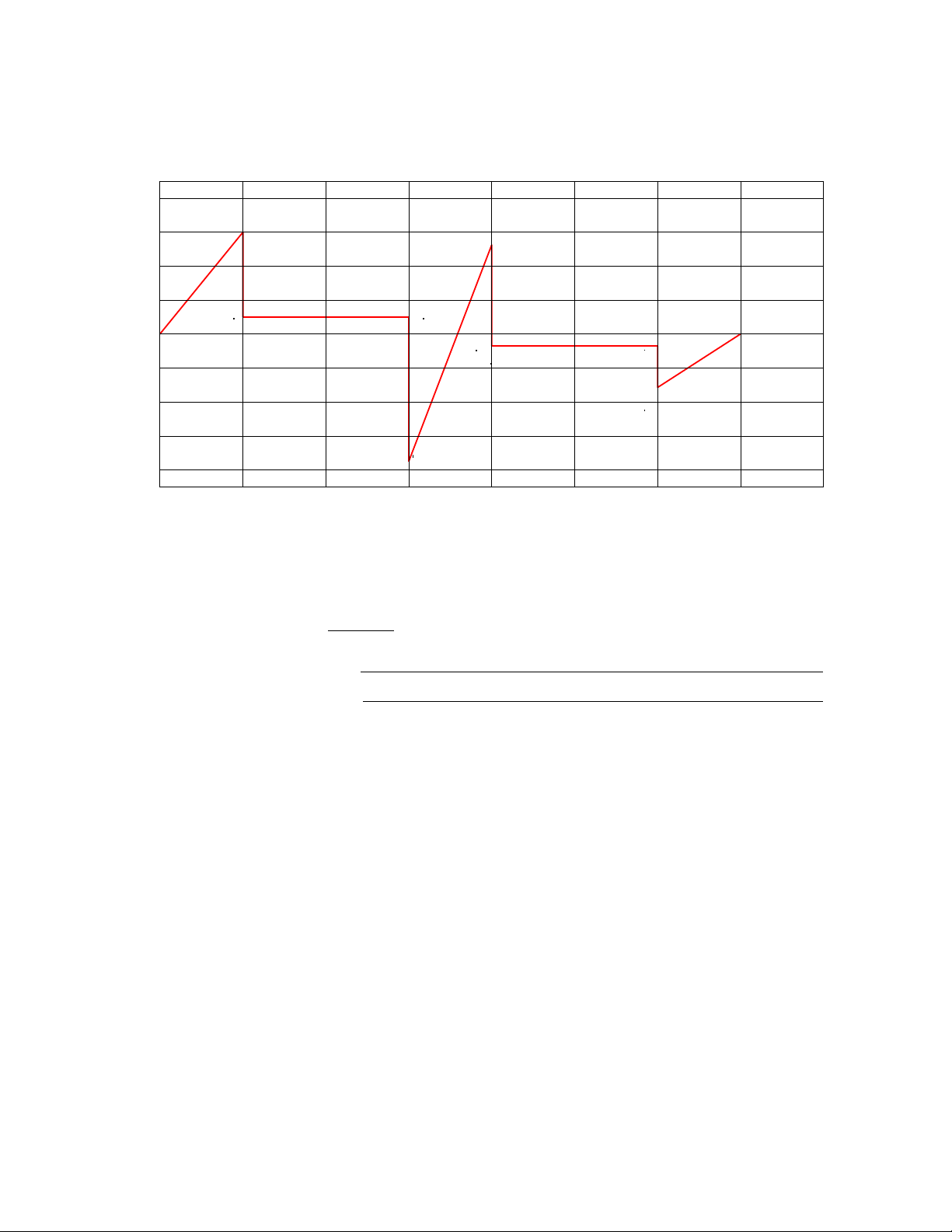
Từ đó ta chọn động cơ 1LA7 130-4AA của hãng SIEMEN
Hình 1.5 Động cơ 3 pha 1LA7 130-4AA
Các tham số của động cơ:
Hình 1.6 Tham số động cơ 3 pha 1LA7 130-4AA
Tên tham số Giá trị Đơn vị Công suất định mức 5.5 kW Điện áp định mức 400 V Dòng điện định mức 6,3 A Tần số định mức 50 Hz Tốc độ định mức 1455 Vòng/Phút Dòng điện khởi động 11,4 A Moment định mức 36 N.m Moment cực đại 108 N.m Moment quán tính 0.036 Kg.m2 Số cực 4 Cực
Bảng 1.1 Tham số động cơ 3 pha 1LA7 130-4AA • Lựa chọn hộp số
Do động cơ lựa chọn thừa tốc độ nhưng lại thiếu moment nên ta cần chọn
một hộp số. Tốc độ định mức của động cơ là 1455 v/p trong khi tốc độ tối đa yêu
cầu chỉ là 159v/p nên ta sử dụng hộp số giảm tốc có tỉ số truyền 9:1.
Chon Gearbox AL095 với tỉ số truyền 9:1 Thông số Giá trị Đơn vị Tỉ số 9:1 Khối lượng 2,3 Kg Nhiệt độ hoạt động -10 tới 90 Độ C
Bảng 1.2 Thông số Gearbox AL095
Hình 1.7 Gearbox AL095
Từ đó ta tính được tốc độ định mức quy đổi và momen định mức quy đổi khi sử dụng hộp số:
➢ Tốc độ định mức quy đổi: 16,9 rad/s
➢ Momen định mức quy đổi: 324 Nm
Vậy thông số sau khi tính chọn động cơ và gearbox phù hợp với hệ truyền động
Các thông số đầu ra của động cơ sau khi có bộ giảm tốc:
➢ Công suất định mức: = 5,5 kW
➢ Tốc độ định mức: = 162 rpm
➢ Momen định mức: = 324 Nm
➢ Momen quán tính: = 0.036 kg.m2
➢ Momen cực đại = 972 Nm
III. Kiểm nghiệm động cơ
Đã biết được moment quán tính của động cơ JM = 0,036 kg.m2nên ta tiền
hành tính toán lại moment trên trục động cơ khi hoạt động. ➢ ( 100 −0 )
Từ 0(s) đến 1(s): T1= (0,5*62+0,036)* 6 +6*10= 360,6 (N.m) ( 1−0 ) ➢ 0
Từ 1(s) đến 3(s): T1= (0,5*62+0,036)* +6*10= 60 (N.m) (3−1) −70 + 100 ➢ ( )
Từ 3(s) đến 4(s): T1= (0,5*62+0,036)* 6 6 +6*10= -451,02 (N.m) (4−3 )
➢ Từ 4(s) đến 6(s): T1= (0,5*62+0,036)* 0 +6*10= 60 (N.m) 6−4 0+ 70 ➢ ( )
Từ 6(s) đến 7(s): T1= (0,5*62+0,036)* 6 +6*10= 270,42 (N.m) (7−6 )
Dưới đây là đồ thị momen động cơ sau kiểm nghiệm: 1000 Tmax = 972 N.m 800 600 400 Tđm=327 N.m 360.6 270 270.42 ) 200 m. 60 (N 0 60 60 60 m e T -200 -400 - .2 451 -451.2 -600 800 Tmax = 972 N.m -1000 0 1 2 3 4 5 6 7 T(s)
Hình 1.8 Đồ thị momen động cơ sau kiểm nghiệm
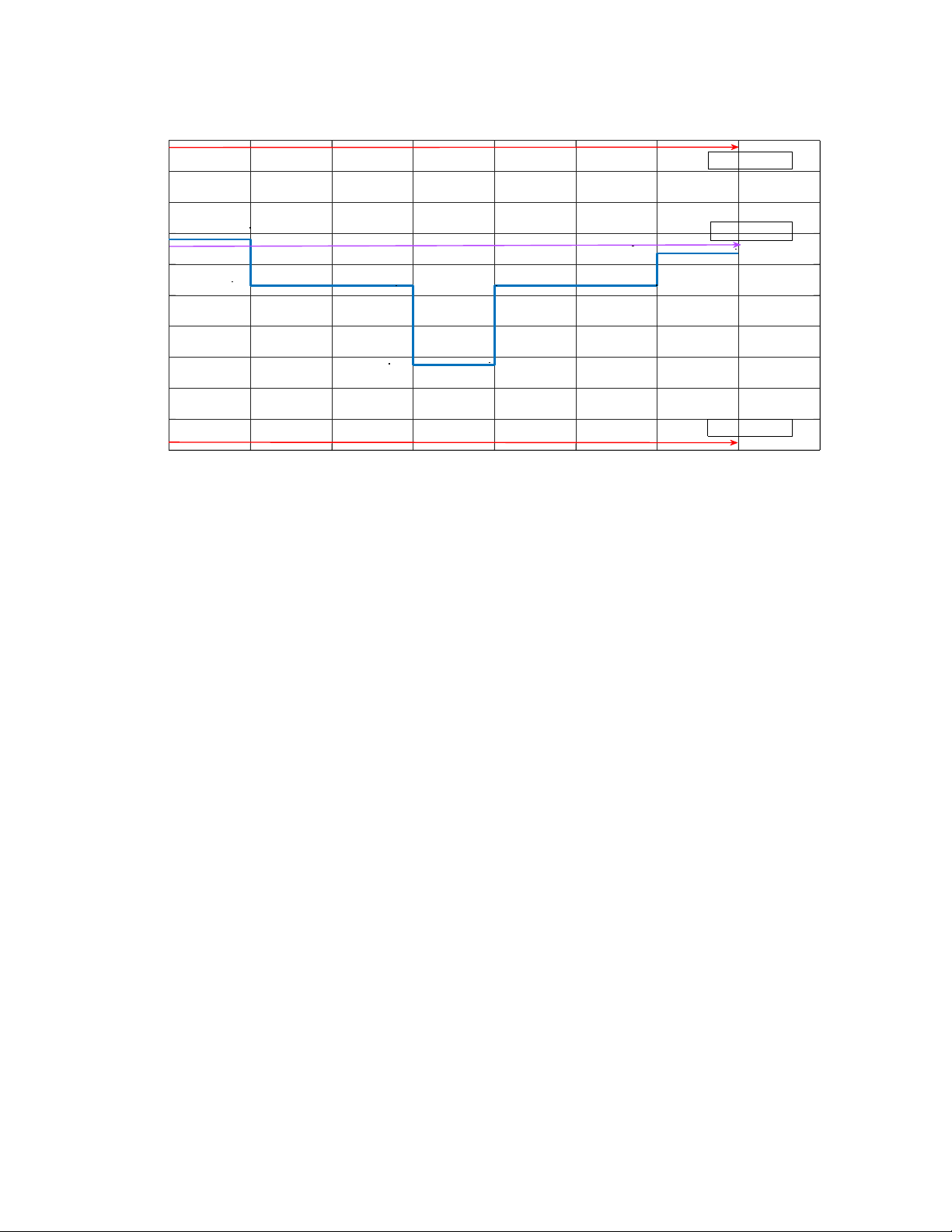
Hình 1.9 Sơ đồ tổng quát của hệ thống
CHƯƠNG II. TÍNH CHỌN MẠCH ĐIỆN TỬ CÔNG SUẤT
I. Tính chọn bộ chỉnh lưu
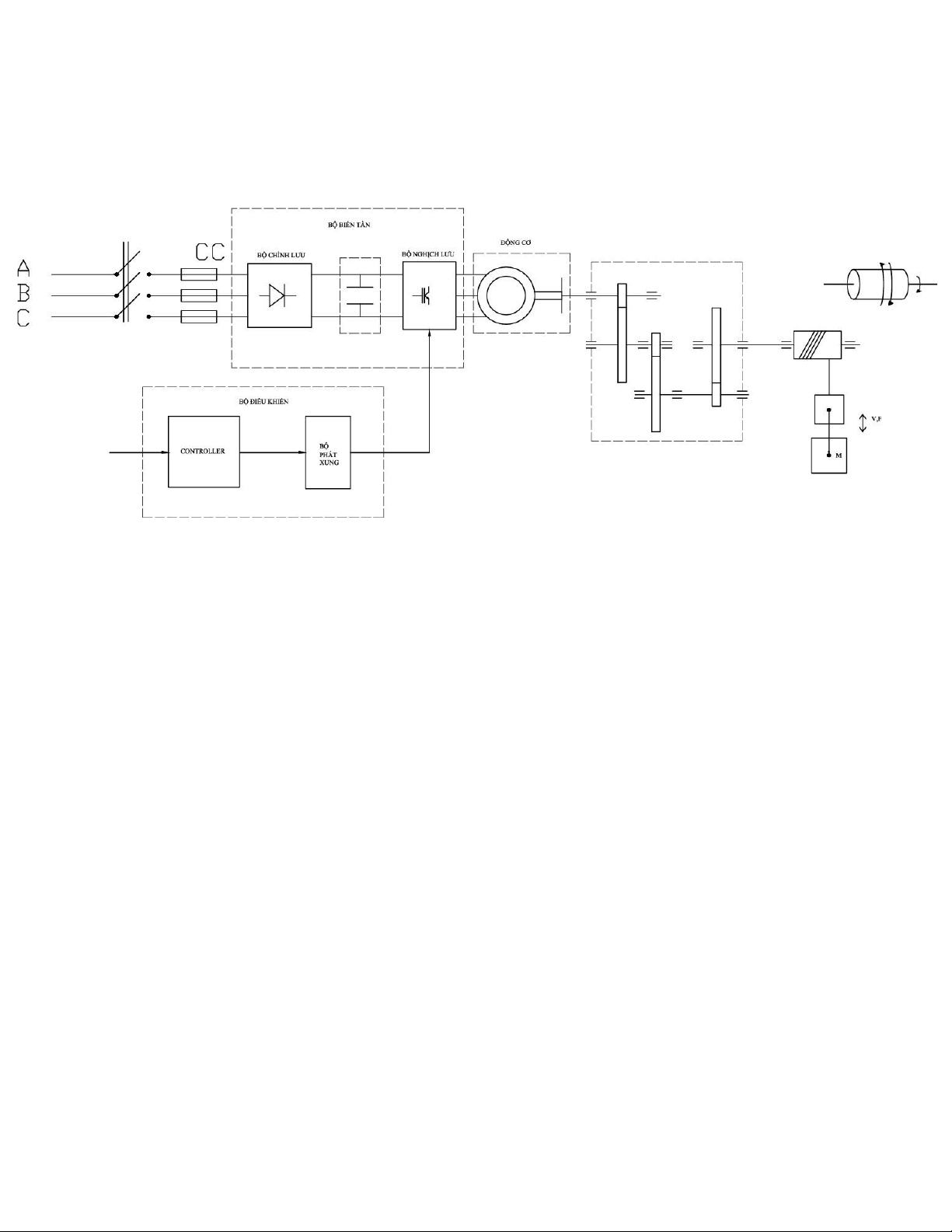
1. Khái quát về chỉnh lưu
Chức năng: Biến đổi dòng điện xoay chiều thành dòng điện một chiều.
Hình 2.1 Sơ đồ khối tổng quát của bộ chỉnh lưu
Khối điều khiển: cấp xung điều khiển van(trường hợp van có điều khiển)
Khối lọc: giúp điện áp đầu ra mạch chỉnh lưu là điên áp là điện áp một chiều bằng phẳng theo yêu cầu.
Ứng dụng: Cấp nguồn cho các tải 1 chiều: động cơ điện 1 chiều; bộ nạp AC acquy;
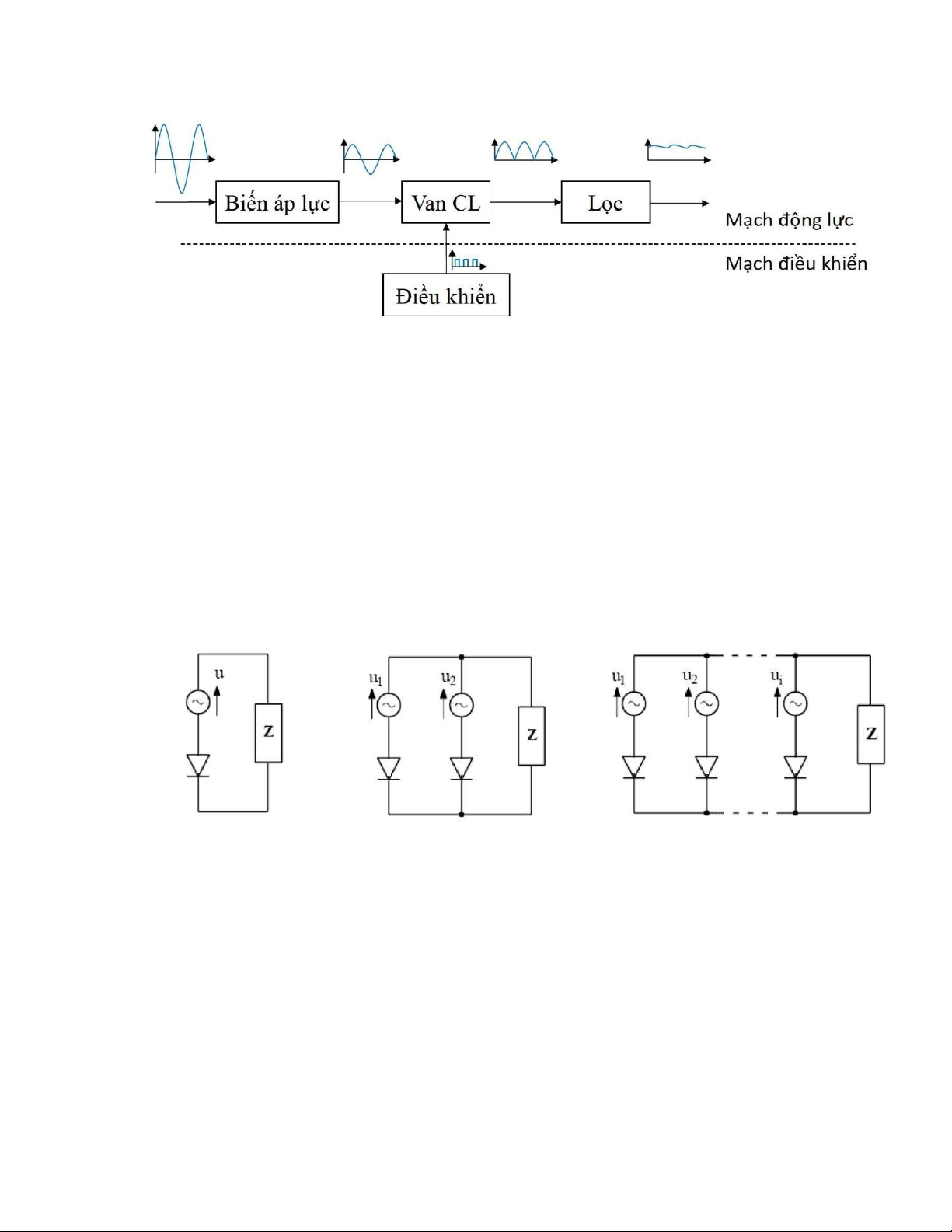
Mạ điện phân, máy hàn 1 chiều; nam châm điện, truyền tải điện 1 chiều cao áp… Phân loại:
Dựa theo số pha nguồn cấp cho các van chỉnh lưu: 1 pha,2 pha,3 pha, 6 pha…
Hình 2.2 Phân loại chỉnh lưu
2. Lựa chọn bộ chỉnh lưu
Do trong đề tài sử dụng biến tần để điều khiển động cơ 3 pha không đồng bộ nên
toàn bộ khâu điều khiển nằm ở phần nghịch lưu, phần chỉnh lưu chỉ có nhiệm vụ biến đổi
nguồn xoay chiều thành nguồn một chiều cung cấp cho bộ nghịch lưu. Do đó ta lựa chọn
bộ chỉnh lưu 3 pha không điều khiển, sử dụng diode. a, Cấu tạo:
▪ Nguồn 3 pha lý tưởng đối xứng: u1=Um*sinӨ 2 π u2=Um*sin(Ө− ¿ 3 4 π u3=Um*sin(Ө− ) 3 ▪ 6 van Diode l.
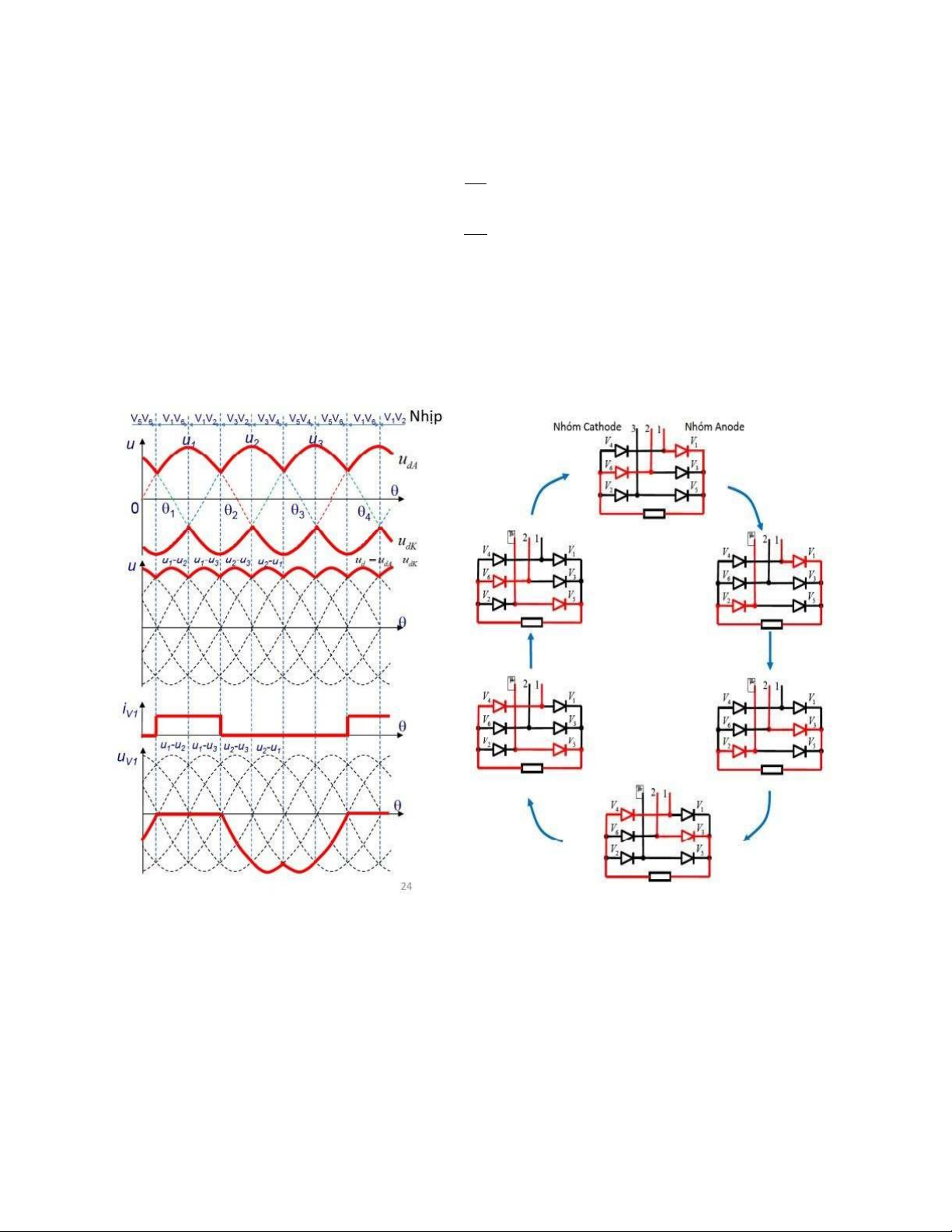
b, Nguyên lý hoạt động: thời điểm đóng mở các diode do điện áp nguồn quyết định.
Nhóm Anode: diode mở khi áp pha nguồn tương ứng dương nhất
Nhóm Cathode: diode mở khi áp pha nguồn tương ứng âm nhất.
Hình 2.3 Điện áp xoay chiều 3 pha: 220/380V và nguyên lý hoạt động của bộ chỉnh lưu
3. Tính chọn diode
Ta sử dụng bộ chỉnh lưu cầu 3 pha không điều khiển với các van bán dẫn là các diode
Điện áp xoay chiều 3 pha: 220/380V
Điện áp ra sau bộ chỉnh lưu: Ud = 3 √6∗U 3 √6∗220 = =514 V π π
Điện áp ngược đặt lên mỗi diode: Ung = U*√6= 539 V Chọn
hệ số dự trữ Kdt = 1.3
=> U’ng = Ung *1.3 = 1.3*539 = 700 V
Dòng điện định mức của động cơ Idm = 6,2 A
Suy ra, dòng điện trung bình qua các van = 0,4 A
Chọn hệ số dự trữ dòng điện => Iv = Id 6,2 = = 2,07 A 3 3
Từ điện áp ngược đặt lên diode và dòng chạy qua nó ta đi chọn diode:
chọn được diode DIODE 1N5408 với các thông số:
+ Điện áp ngược: = 1000 V + Dòng định mức: = 3 A Hình 2.4 Diode 1N5408
II. Tính chọn bộ nghịch lưu
1. Khái quát về nghịch lưu a) Chức năng:
Chuyển đổi năng lượng từ nguồn điện 1 chiều không đổi sang dạng năng
lượng điện xoay chiều. b) Ứng dụng:
- ung cấp năng lượng cho tải xoay chiều.
- các bộ nghịch lưu tạo thành bộ phận chủ yếu trong cấu tạo của bộ biến tần. c) Phân loại:
- Theo số lượng pha: 1 pha, 3 pha, nhiều pha
- Theo sơ đồ: Hình cầu, tia.
- Theo đặc điểm nguồn: Nguồn áp, nguồn dòng. Cấu tạo:
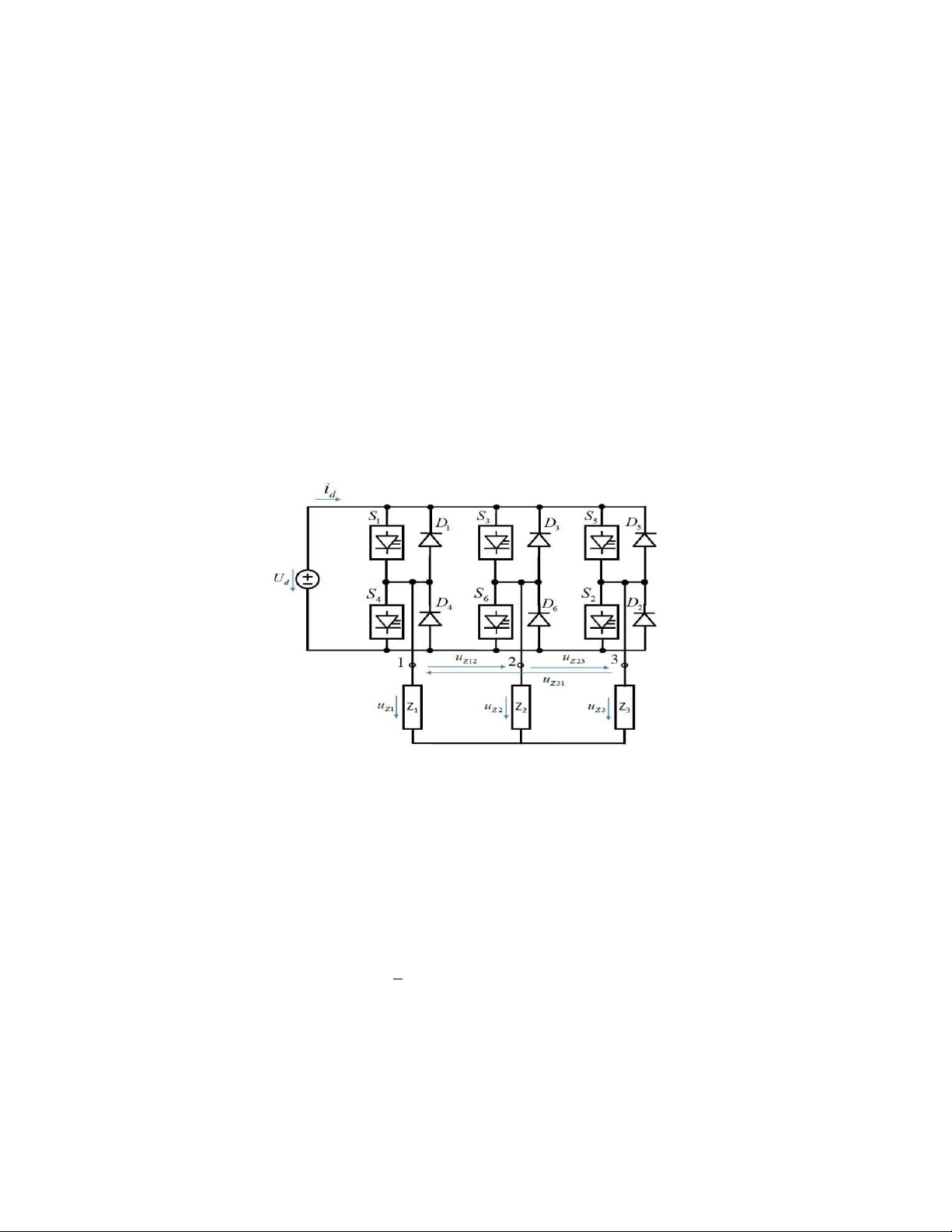
* 6 van bán dẫn S1,S2,…S6. Các cặp van chung nút tải(S1,S4),(S3,S6), (S5,S2).
* 6 diode D1,D2,…D6 mắc đối song.
* Tải ba pha có thể mắc hình sao hoặc dạng tam giác.
Hình 2.5 Bộ nghịch lưu Hoạt động:
- Thứ tự kích đóng các công tắc được biểu diễn trên hình.
- Bất kì thời điểm nào cũng có 2 hoặc 3 van dẫn điện.
- Các cặp van chung nút tải được kích mở đối nghịch.
π < ѱ ≤π 3
Nguyên tắc thay đổi tần số: * Độ lớn: … Ud
* Tần số: … tần số phát xung vào các bộ khóa
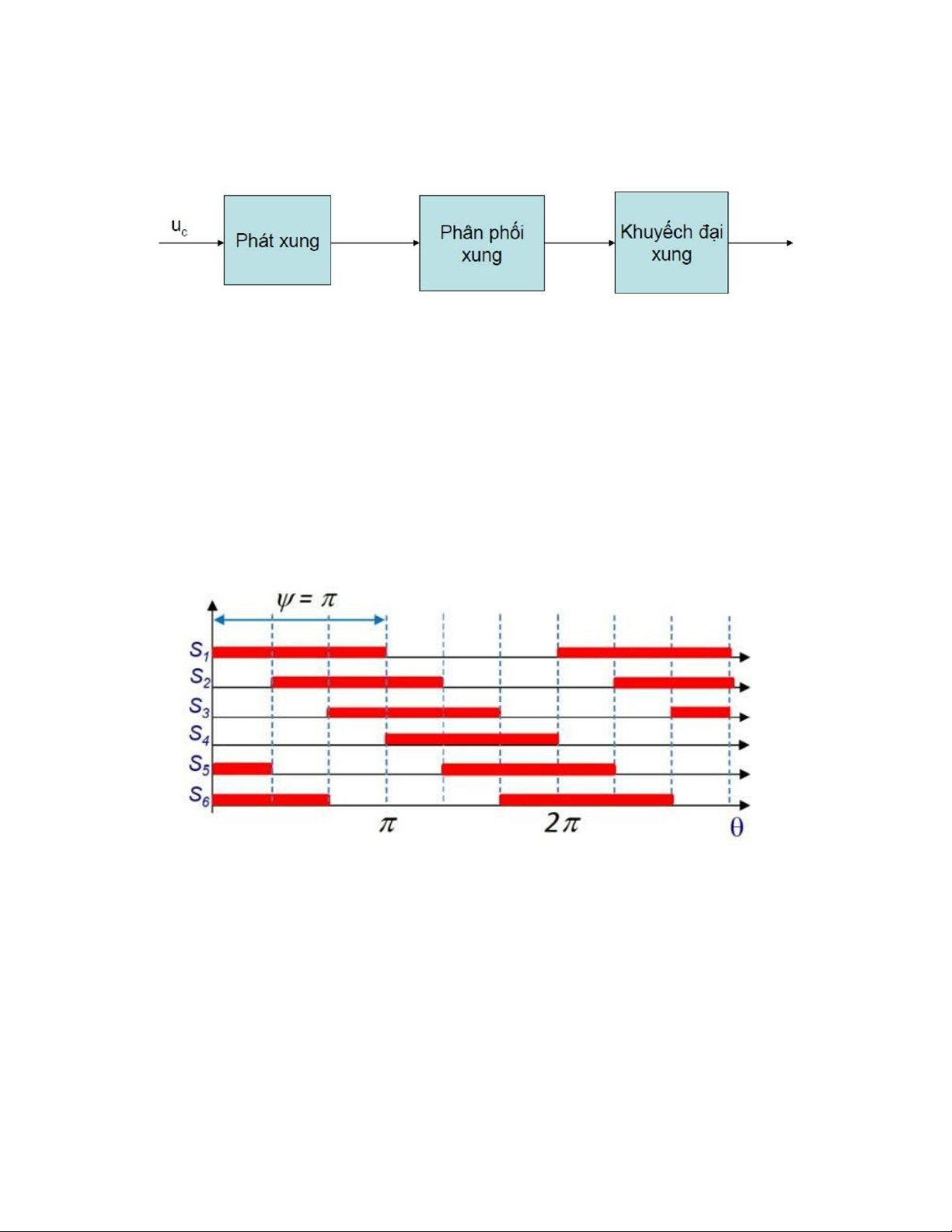
Hình 2.6 Sơ đồ phát xung
Nguyên tắc điều biến độ rộng- PWM (Pulse Width Modulation) - S1,S3,S5. - S2,S4,S6. b) Hoạt động
- Thứ tự kích mở các côgn tắc được biểu diễn trên hình…
- Bất kì thời điểm nào cũng có 2 hoặc 3 van mở
- Các cặp van chung nút tải được kích mở đối nghịch
Hình 2.6 Giản đồ kích xung
Hình 2.7 Đường đi của dòng điện qua các nhịp
Hình 2.8 Dòng điện qua tải trong các nhịp
3. Tính chọn van điều khiển
Vì điện áp ra sau nghịch lưu thay đổi theo như giá trị mong muốn do vậy hệ
thống này ta sử dụng bộ nghịch lưu điều khiển hoàn toàn với van điều khiển đóng
cắt được chọn là IGBT vì IGBT là sự kết hợp giữa khả năng đóng cắt nhanh của
MOSFET và khả năng chịu tải lớn của transistor thông thường, được sử dụng phổ biến trong biến tần.
Điện áp ngược đặt lên IGBT là: Ung = Ku*Ud = 1,3*515 = 670 V (với Ku =1,3) P 5500
Dòng điện qua mỗi van: I = =¿ = 14,43 A (với K = 1,3) v √3 U √3∗220 i
Từ các thông số này chọn: IGBT: IGBT GT15M321 (Ung = 900 V, Iv = 15A, Vdk =4,5V
Hình 2.9 IGBT GT15M321
III. Tính chọn mạch lọc
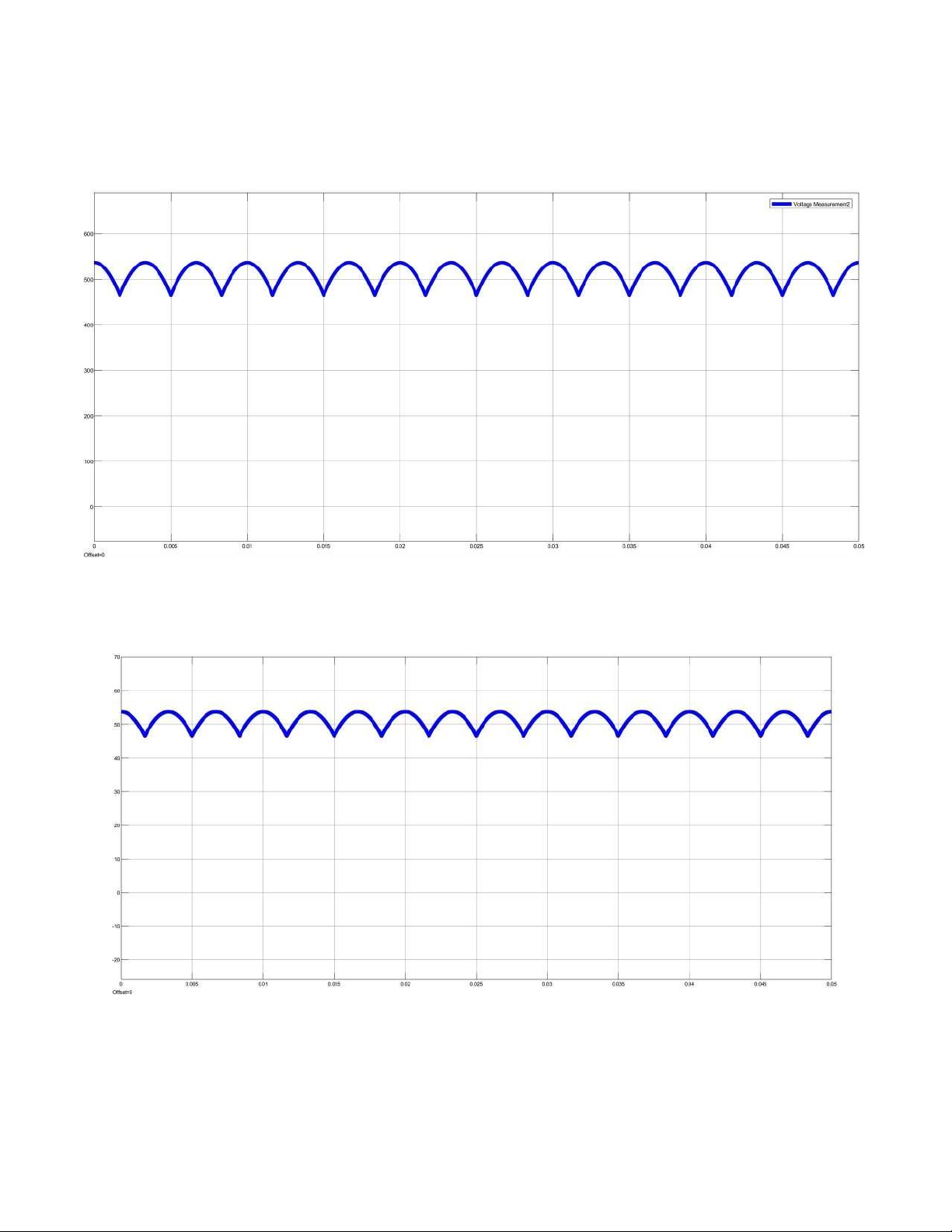
Điện áp và dòng điện đi qua bộ chỉnh lưu để biến đổi về dạng một chiều sẽ
có hình dạng nhấp nhô chứ không phẳng hoàn toàn. Do đó chúng ta cần phải thiết
kế một mạch lọc để san phẳng điện áp từ đó cung cấp cho bộ nghịch lưu. Chọn
mạch LC kết hợp giữa lọc điện cảm và lọc điện dung nhằm san phẳng cả điện áp lẫn dòng điện.
Hình 2.10 Đồ thị điện áp sau chỉnh lưu
Hình 2.11 Đồ thị dòng điện sau chỉnh lưu
Chọn hệ số san bằng Ksb = 60
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32