Báo cáo Đồ án môn Robot Công nghiệp: Mô hình Cánh tay 4 bậc môn Robot công nghiệp | Trường Đại Học Thái Nguyên
Trong sự nghiệp công nghiệp hóa, hiện đại hóa đất nước vấn đề tự động hóacó vai trò đặc biệt quan trọng. Nhằm nâng cao năng suất dây chuyền công nghệ,nâng cao chất lượng và khả năng cạnh tranh của sản phẩm, cải thiện điều kiện laođộng, nâng cao năng suất lao động Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Robot công nghiệp 5 tài liệu
Trường: Đại học Thái Nguyên 386 tài liệu
Tác giả:















Preview text:
lOMoAR cPSD| 45740413
MỤC LỤC LỜI MỞ ĐẦU ....................................................................................... 1
CHƯƠNG 1: ĐẶT VẤN ĐỀ VÀ GIỚI THIỆU VỀ ROBOT 4 BẬC .................. 1
1.1 Đặt vấn ề và mục tiêu của ề tài ....................................................................... 1
1.1.1. Đặt vấn ề .............................................................................................. 1
1.1.2. Mục tiêu của ề tài ................................................................................. 2
1.2. Giới thiệu về robot 4 bậc ............................................................................... 3
1.2.1. Tổng quan về Robot 4 bậc ................................................................... 3
1.2.2. Ưu và nhược iểm .................................................................................. 3
1.2.3. Lựa chọn phương án ............................................................................ 3
CHƯƠNG 2: GIỚI THIỆU VỀ CÁC THIẾT BỊ CHÍNH ................................... 4
2.1. Arduino UNO R3 .......................................................................................... 4
2.1.1. Thông số kỹ thuật ................................................................................. 5
2.1.2. Nguyên lí hoạt ộng ............................................................................... 6
2.1.3. Ứng dụng .............................................................................................. 6
2.2. Module HC05 ................................................................................................ 6
2.2.1. Thông số kỹ thuật ................................................................................. 6
2.2.2. Nguyên lý hoạt ộng .............................................................................. 7
2.2.3. Ứng dụng .............................................................................................. 7
2.3. Servo .............................................................................................................. 8
2.3.1. Thông số kỹ thuật ................................................................................. 8
2.3.2. Nguyên lý hoạt ộng .............................................................................. 8
2.3.3. Ứng dụng .............................................................................................. 8
CHƯƠNG 3: THIẾT KẾ VÀ MÔ PHỎNG MẠCH ............................................. 9
3.1. Phần mềm hỗ trợ ............................................................................................ 9
3.1.1. Phần mềm Proteus 8 Professional ........................................................ 9
3.1.2. Easy Robot ......................................................................................... 10
3.1.3. Arduino IDE ....................................................................................... 11
3.1.4. Phần mềm Solidworks ....................................................................... 13
3.2. Sơ ồ khối ...................................................................................................... 14
3.3. Sơ ồ mạch .................................................................................................... 14
3.4. Code mạch ................................................................................................... 17 lOMoAR cPSD| 45740413
KẾT LUẬN ............................................................................................................. 21
TÀI LIỆU THAM KHẢO ..................................................................................... 21 lOMoAR cPSD| 45740413
MỤC LỤC HÌNH ẢNH
Hình ảnh 1: Robot hàn trong sản xuất cơ khí.............................................................. 2
Hình ảnh 2: Robot ược sử dụng trong công oạn và lắp ráp ôtô...............................3
Hình ảnh 3: Arduino Uno R3....................................................................................... 5
Hình ảnh 4: Cấu tạo của Arduino Uno
R3...................................................................5
Hình ảnh 5: Module HC05........................................................................................... 7 Hình ảnh 6: Servo
SG90...............................................................................................8 Hình ảnh 7:
Phần mềm Proteus 8 Professional..........................................................10
Hình ảnh 8: Giao diện chính phần mềm Proteus....................................................... 10
Hình ảnh 9: Giao diện chính của phần mềm Easy
Robot..........................................11
Hình ảnh 10: Giao diện chính của phần
mềm............................................................12
Hình ảnh 11: Giao diện chính Solidworks..............................................................
..15 Hình ảnh 12: Mô hình cánh tay
robot.......................................................................15
Hình ảnh 13: Sơ ồ nguyên lý....................................................................................15
Hình ảnh 14: Bản vẽ cơ
khí........................................................................................16
Hình ảnh 15: Giao diện trên Smartphone.................................................................. 16
Hình ảnh 16: Thiết kế trên Solidworks.....................................................................17 lOMoAR cPSD| 45740413 LỜI MỞ ĐẦU
Cùng với sự phát triển không ngừng của các ngành khoa học kỹ thuật, các ngành
công nghiệp cũng phát triển nhanh chóng. Việc áp dụng các máy móc hiện ại vào sản
xuất là một yêu cầu không thể thiếu trong các nhà máy nhằm tăng năng suất, tăng chất
lượng và giảm giá thành sản phẩm. Song song với sự phát triển ó, công nghệ chế tạo
Robot cũng phát triể n nhanh chóng ặc biệt là ở các nước phát triển nhằm áp các nhu cầu
về sản xuất,sinh hoạt, quốc phòng…Robot có thể thực hiện những công việc mà con
người khó thực hiện và thậm chí không thực hiện ược như: làm những công việc òi hỏi
ộ chính xác cao, làm việc trong môi trường nguy hiểm (như lò phản ứng hạt nhân ,dò
phá mìn trong quân sự ), thám hiểm không gian vũ trụ… Trong các họ Robot, chúng ta
không thể không nhắc ến ROBOT CÔNG NGHIỆP với những ặc thù mà những Robot
khác không có. Cánh tay robot phân loại sản phẩm theo màu với khả năng linh hoạt, ộ
chính xác cực cao, ược ứng dụng rộng rãi trên khắp các nước thay thế con người làm
những công việc ở trong môi trường ộc hại hay chế tạo Robot khác với ộ chính xác mà
con người không thể làm bằng tay ược.
CHƯƠNG 1: ĐẶT VẤN ĐỀ VÀ GIỚI THIỆU VỀ ROBOT 4 BẬC
1.1 Đặt vấn ề và mục tiêu của ề tài
1.1.1. Đặt vấn ề
Tầm quan trọng cánh tay robot trong hiện ại hóa ất nước:
Trong sự nghiệp công nghiệp hóa, hiện ại hóa ất nước vấn ề tự ộng hóa có vai
trò ặc biệt quan trọng. Nhằm nâng cao năng suất dây chuyền công nghệ, nâng cao chất
lượng và khả năng cạnh tranh của sản phẩm, cải thiện iều kiện lao ộng, nâng cao năng
suất lao ộng …vấn ề ược ặt ra là hệ thống sản xuất phải có tính linh hoạt cao.Robot
công nghiệp, ặc biệt là những tay máy robot là bộ phận quan trọng ể tạo ra những hệ
thống ó. Tay máy Robot ã có mặt trong sản xuất từ nhiều năm trước, ngày nay tay
máy Robot ã dùng ở nhiều lĩnh vực sản xuất, từ những ưu iểm mà tay máy Robot hoạt
ộng trong quá trình sản xuất, làm việc, chúng ta có thể rút ra những tính năng mà con
người không thể có ược : khả năng làm việc ổn ịnh, có thể làm việc trong môi trường
ộc hại…..Do ó việc ầu tư nghiên cứu, chế tạo ra những tay máy Robot phục vụ cho
công cuộc tự ộng hóa sản xuất là rất cần thiết cho hiện tại và tương lai. lOMoAR cPSD| 45740413
Hình ảnh 1: Robot hàn trong sản xuất cơ khí
Hình ảnh 2: Robot ược sử dụng trong công oạn và lắp ráp ôtô
1.1.2. Mục tiêu của ề tài
Thực hiện ề tài “ MÔ HÌNH CÁNH TAY ROBOT 4 BẬC TỰ DO GẤP SẢN
PHẨM “ có thể dùng mô hình cánh tay máy ể phục vụ trực tiếp cho công cuộc giảng
dạy. Quá trình nghiên cứu không chỉ là ộng lực kích thích niềm say mê học hỏi mà
còn nhằm giúp cho sinh viên hiểu rõ hơn về lí thuyết, tạo iều kiện cho việc dạy và học
ược sinh ộng hơn, ồng thời giúp cho chúng em nghiên cứu kĩ khái niệm mô hình,
nguyên lý làm việc cũng như tập lệnh vi xử lý, hiểu rõ hơn về một cánh tay robot,
cũng như về chuyên ngành của chúng em. Sản phẩm trước hết có thể ứng dụng vào lOMoAR cPSD| 45740413
phương tiện giảng dạy tại trường và nếu ược phát triển rộng, và i sâu hơn thì có thể
ược ứng dụng thực tế vào sản xuất công nghiệp và ặc biệt cung cấp một cái nhìn tổng
quát về vi xử lý và tay máy công nghiệp .
1.2. Giới thiệu về robot 4 bậc
1.2.1. Tổng quan về Robot 4 bậc
Về cơ bản, một cánh tay robot 4 DOF ược chế tạo với 4 trục servo bao gồm
các phần dọc và ngang. Các bộ phận này bao gồm servo cơ sở, servo vai, servo tay
và servo kẹp. Quá trình thiết kế bắt
ầu bằng cách chế tạo một dụng cụ cánh tay robot và sau
ó sắp xếp thành một ơn vị hoàn chỉnh.
Robot với cấu hình 4 bậc tự do RRRR, bao gồm : - Khớp
ầu tiên là khớp xoay giúp cánh tay xoay sang hai bên
- Tiếp ó là 3 khớp xoay giúp cánh tay gập lên xuống ể nâng hạ vật và tay kẹp dùng ể gắp vật.
1.2.2. Ưu và nhược iểm − Ưu iểm:
+ Tầm với của robot lớn hơn so với robot 3 bậc tự do RRR. Do ó không gian
+ Với 4 bậc tự do robot linh hoạt hơn trong việc di chuyển tiếp cận vật − Nhược iểm:
+ Thiết kế cơ khí phức tạp hơn so với robot 3 bậc tự do RRR.
+ Điều khiển robot cũng phức tạp hơn.
1.2.3. Lựa chọn phương án − Lựa chọn phương án
+ Ta lựa chọn phương án thiết kế là robot 4 bậc tự do RRRR.
Vì không gian làm việc lớn hơn, robot linh hoạt hơn và phù hợp với yêu cầu của ề tài.
+ Robot gồm 4 khâu ( 3 thanh truyền nồi giữa các khớp và tay kẹp) và 4 khớp xoay
− Chọn Vật Liệu: Vật liệu làm robot chủ yếu là nhựa. − Chọn Động Cơ + Cánh tay robot phải
ược iều khiển một cách chính xác nên ta chon ộng cơ servo ể iều khiển các khớp
+ Động cơ sử dụng nguồn 12V, DC lOMoAR cPSD| 45740413
+ Dòng khởi ộng của ộng cơ 1.3A. − Thiết Kế Thân Robot
+ Khớp 1 ( Khớp ế ): Đây là khớp
ế xoay của cánh tay, chủ yếu chịu lực uốn và nén.
+ Khớp 2, 3, 4: Trục khớp này chủ yếu chịu lực cắt tại 2 vị trí nối với khâu tiếp theo,
sử dụng trục Ө10. Truyền
ộng cho khớp bằng ộng cơ servo.
+ Tay kẹp : Ứng dụng nguyên lý tay kẹp hình bình hành ể có thể óng mở
má kẹp song song, tiếp xúc tốt hơn với vật công tác. Truyền ộng cho má kẹp óng mở bằng
CHƯƠNG 2: GIỚI THIỆU VỀ CÁC THIẾT BỊ CHÍNH 2.1. Arduino UNO R3
Arduino Uno R3 DIP là dòng Arduino thế hệ thứ 3 cũng giống như các phiên
bản trước ây giúp người dùng dễ dàng tiếp cận với lập trình ể tạo ra phần cứng có
những tính năng mong muốn một cách nhanh chóng với chi phí hợp lý.
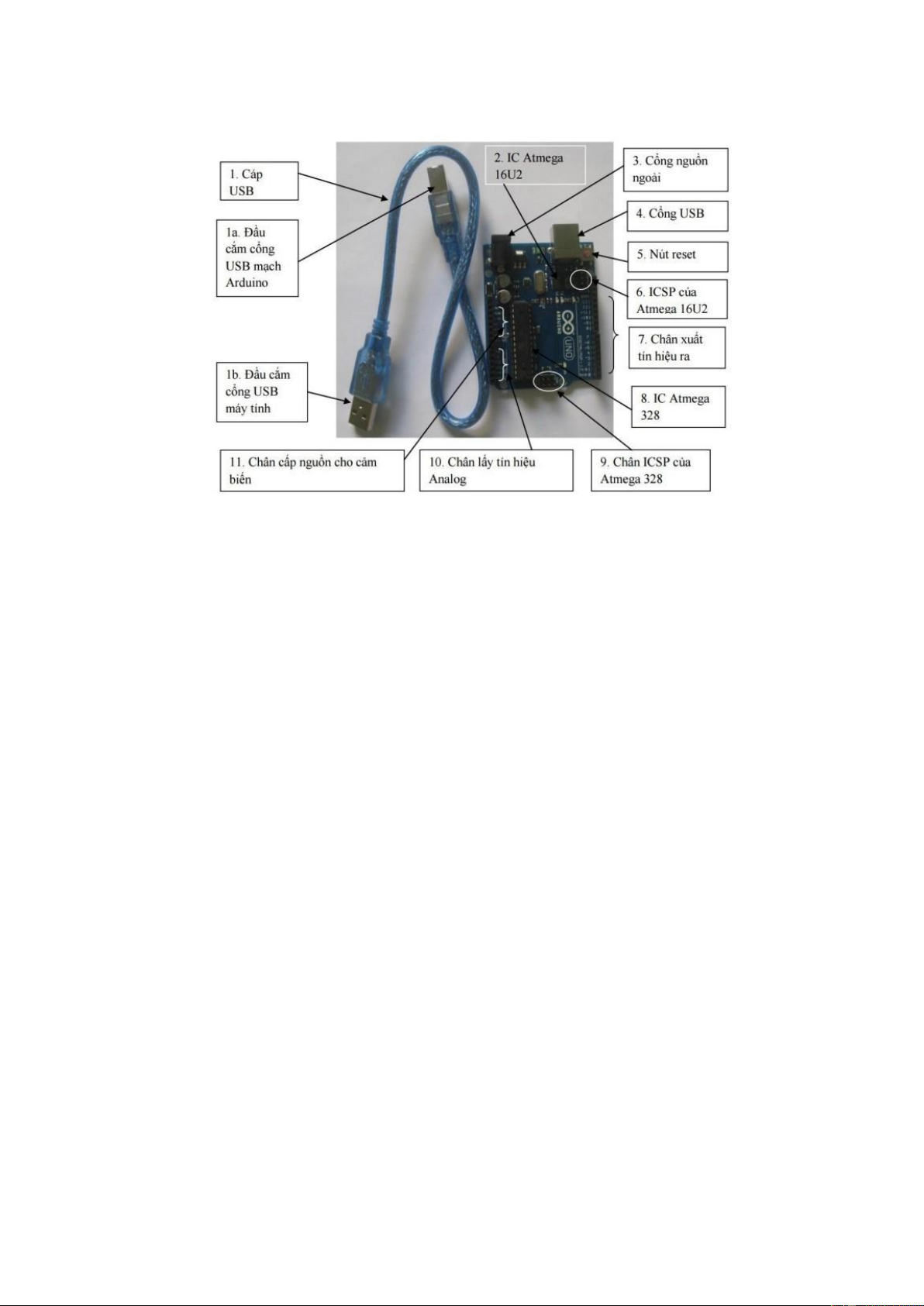
Hình ảnh 3: Arduino Uno R3 lOMoAR cPSD| 45740413
Hình ảnh 4: Cấu tạo của Arduino Uno R3
2.1.1. Thông số kỹ thuật
− Vi iều khiển: ATmega328 họ 8bit
− Điện áp hoạt ộng: 5~12V DC
− Tần số hoạt ộng: 16 MHz
− Dòng tiêu thụ: Khoảng 30mA
− Điện áp vào giới hạn: 19V DC
− Số chân Digital I/O: 14 (6 chân PWM)
− Số chân Analog: 6 ( ộ phân giải 10bit)
− Dòng tối a trên mỗi chân I/O: 30 mA
− Dòng ra tối a (5V): 500 mA
− Dòng ra tối a (3.3V): 50 mA
− Bộ nhớ flash: 32 KB (ATmega328) với 0.5KB dùng bởi bootloader − SRAM: 2 KB (ATmega328) − EEPROM: 1 KB (ATmega328) − Khối lượng: 25 gram lOMoAR cPSD| 45740413
2.1.2. Nguyên lí hoạt ộng
Arduino Uno R3 ược sử dụng bằng cách gắn vào máy tính thông qua một cáp
USB. Sau khi ã lắp ặt xong, chúng ta sẽ sử dụng pin hoặc bộ chuyển ổi AC-DC ể cung
cấp iện cho mạch kit. Khi ấu nối thành công, mạch sẽ kích hoạt và bắt ầu. 2.1.3. Ứng dụng
Arduino Uno R3 DIP bạn có thể ứng dụng vào những mạch ơn giản như mạch
cảm biến ánh sáng bật tắt èn, mạch iều khiển ộng cơ,… hoặc cao hơn nữa bạn có thể
làm những sản phẩm như: máy in 3D, Robot, khinh khí cầu, máy bay không người
lái, và các ứng dụng lớn khác. 2.2. Module HC05
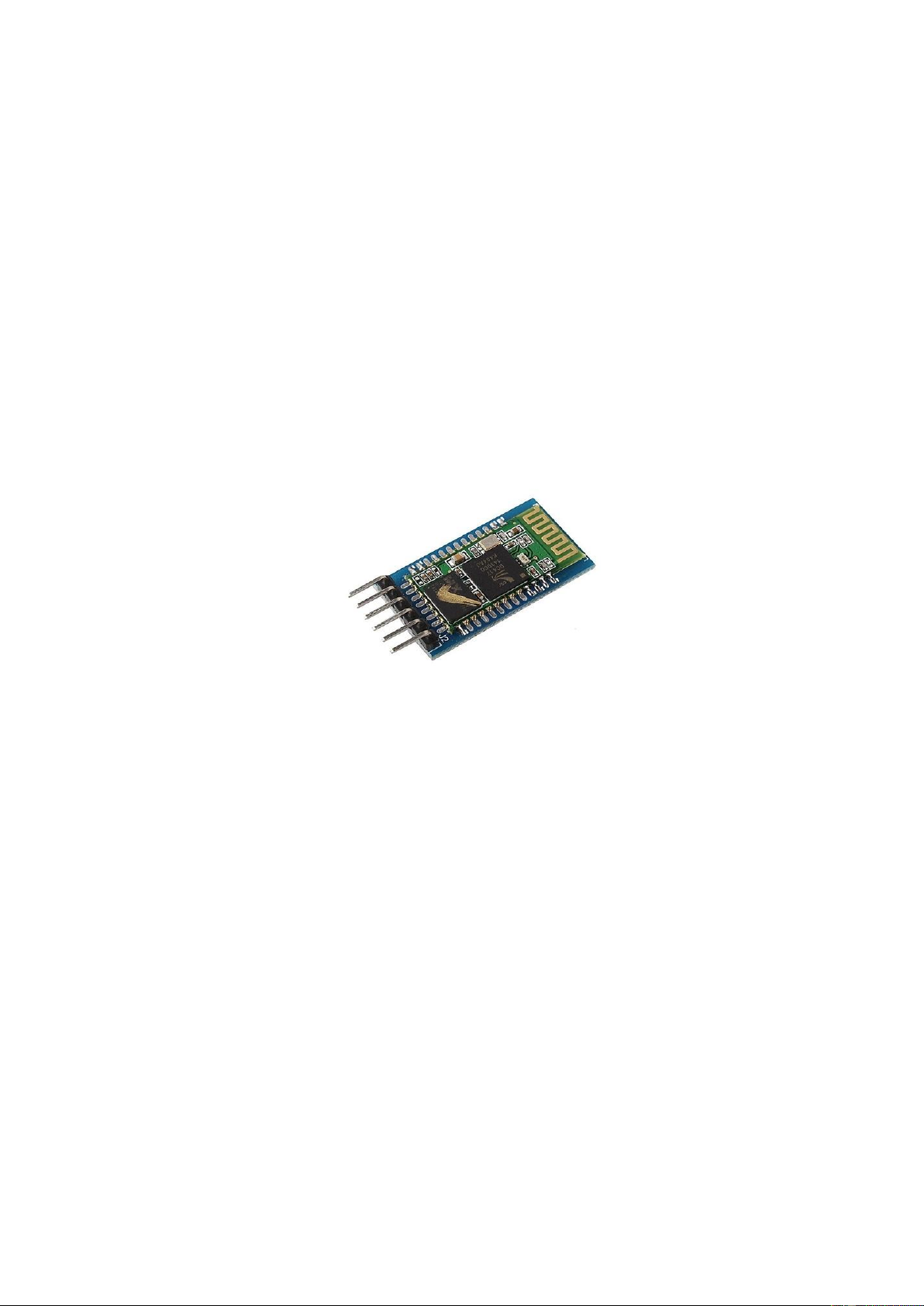
Hình ảnh 5: Module HC05
2.2.1. Thông số kỹ thuật
− Điện áp hoạt ộng : +3.3VDC 30mA(hỗ trợ IC 5.0V)
− Dòng iện khi hoạt ộng : Khi Pairing 30mA , sau khi pairing hoạt ộng truyền nhận bình thường 8mA
− Baudrate : 1200,2400,4800,9600,19200,38400,57600,11520
− Dải tần hoạt ộng : 2.4GHz
− Kích thước : 26.9mm x 13mm x 2.2mm
− Giao tiếp : Bluetooth serial port
− Nhiệt ộ làm việc : -20℃ ~ +75℃
− Tốc ộ : - Asynchronous : 2.1Mbps(Max)/160kbps − Synchronous : 1Mbps/1Mbp lOMoAR cPSD| 45740413
2.2.2. Nguyên lý hoạt ộng
Module có 2 chế ộ làm việc (có thể lựa chọn chế ộ làm việc bằng cách thay ổi trạng thái chân 34 KEY): Tự ộng kết nối.
Đáp ứng theo lệnh: khi làm việc ở chế ộ này, các bạn có thể gửi các lệnh AT ể giao tiếp với module.
− Module HC05 có thể nhận 1 trong 3 chức năng: Master, Slave, Loopback (có thể
lựa chọn các chức năng bằng lệnh AT).
− Giao tiếp với module bằng giao tiếp nối tiếp không ồng bộ qua 2 ường RX và TX,
vì vậy các bạn có thể sử dụng PC với chuẩn RS232 hoặc các dòng vi iều khiển ể giao tiếp.
− Bằng cách thay ổi trạng thái chân 34 (KEY), bạn có thể cấu hình chế ộ hoạt ộng cho module:
− Để module làm việc ở chế ộ kết nối tự
ộng: KEY phải ở trạng thái Floating
(trạng thái không kết nối).
− Để module làm việc ở chế ộ áp ứng theo lệnh: KEY = ‘0’ (kết nối xuống ất)àCấp
nguồn cho module à chuyển KEY = ‘1’ (kết nối lên VCC) lúc này có thể sử dụng các lệnh AT ể giao tiếp. 2.2.3. Ứng dụng
Module thu phát Bluetooth HC-05 dùng ể thiết lập kết nối Serial giữa 2 thiết bị bằng
sóng bluetooth. Điểm ặc biệt của module bluetooth HC-05 là module có thể hoạt ộng
ược ở 2 chế ộ: MASTER hoặc SLAVE. Trong khi ó, bluetooth module HC-06 chỉ
hoạt ộng ở chế ộ SLAVE. lOMoAR cPSD| 45740413 2.3. Servo
Hình ảnh 6: Servo SG90
2.3.1. Thông số kỹ thuật
− Điện áp hoạt ộng: 4.8-5VDC
− Tốc ộ: 0.12 sec/ 60 deg (4.8VDC) − Lực kéo: 1.6 Kg.cm
− Kích thước: 21x12x22mm Trọng lượng: 9g
2.3.2. Nguyên lý hoạt ộng − Chế ộ hoạt ộng servo
ược hình thành bởi những hệ thống hồi tiếp vòng
kín. Động cơ servo nhận một tín hiệu xung iện (PWM) từ bộ iều khiển ể
hoạt ộng và ược kiểm soát bằng bộ mã hóa (encoder). − Khi
ộng cơ vận hành thì vận tốc và vị trí sẽ ược hồi tiếp về mạch iều khiển
này thông qua bộ mã hóa (encoder). Khi
ó bất kỳ lý do nào ngăn cản chuyển
ộng và làm sai lệch tốc
ộ cũng như vị trí mong muốn, cơ cấu hồi tiếp sẽ
phản hồi tín hiệu về bộ iều khiển. Từ tín hiệu phản hồi về, bộ iều khiển servo
sẽ so sánh với tín hiệu lệnh và ưa ra iều chỉnh phù hợp, ảm bảo ộng cơ
servo hoạt ộng úng theo yêu cầu ạt ược tốc ộ và vị trí chính xác nhất. 2.3.3. Ứng dụng
− Động cơ servo SG90 có kích thước nhỏ, là loại
ược sử dụng nhiều nhất ể
làm các mô hình nhỏ hoặc các cơ cấu kéo không cần ến lực nặng. lOMoAR cPSD| 45740413
− Động cơ servo SG90 180 ộ có tốc ộ phản ứng nhanh, các bánh răng ược làm bằng
nhựa nên cần lưu ý khi nâng tải nặng vì có thể làm hư bánh răng, ộng cơ RC
Servo 9G có tích hợp sẵn Driver iều khiển ộng cơ bên trong nên có thể dễ dàng iều
khiển góc quay bằng phương pháp iều ộ rộng xung PWM.
CHƯƠNG 3: THIẾT KẾ VÀ MÔ PHỎNG MẠCH
3.1. Phần mềm hỗ trợ
3.1.1. Phần mềm Proteus 8 Professional
Phần mềm vẽ Proteus là phần mềm vẽ mạch iện tử ược phát triển bởi công ty
Lancenter Electronics. Phần mềm có thể mô tả hầu hết các linh kiện iện tử thông dụng
hiện nay, ặc biệt hỗ trợ cho cả các phần mềm như 8051, PIC, Motorola, AVR.
Phần mềm bao gồm 2 mảng chính là ISIS cho phép mô phỏng mạnh iện tử và
ARES dùng ể vẽ mạch in.
Hình ảnh 7: Phần mềm Proteus 8 Professional lOMoAR cPSD| 45740413
Hình ảnh 8: Giao diện chính phần mềm Proteus 3.1.2. Easy Robot
Easy Rob là công cụ mô phỏng robot sử dụng ồ hoạ trong không gian 3 chiều
(3D) và các hình ảnh có thể hoạt ộng ược. Một hệ thống 3D-CAD ơn giản cho phép
tạo ra các khối hình học cơ bản như khối trụ, khối cầu, khối chữ nhật, khối tam giác,
khối hình thang, ... ể vẽ kết cấu của robot.
Hình ảnh 9: Giao diện chính của phần mềm Easy Robot Các Menu chính:
− File: quản lý các tác vụ trên ối tượng là các file: mở, lưu, xóa, sửa lOMoAR cPSD| 45740413
− Robotics: dùng ể nhập các thông số ộng học, ộng lực học, xác ịnh vị trí của dụng
cụ, xác ịnh vị trí robot và các thông số khác. Với robotics menu có thể dễ dàng tạo
một chương trình iều khiển robot hoặc tạo một robot mới.
− Simulate: cho phép iều khiển bằng tay việc di chuyển Robot ến các vị trí khác nhau
(Home, Joint, Cartesian position), chạy chương trình robot, ghi lại và reset tất cả các
vị trí của robot, cũng có thể làm tăng hoặc giảm tốc ộ mô phỏng robot…
− 3D-CAD: Menu 3D CAD cung cấp các công cụ ể vẽ kết cấu robot trong không gian
ba chiều, cũng như ể thiết kế các công cụ, các ối tượng làm việc. Để vẽ ược kết cấu
của robot, dựa vào các khối hình học ơn giản có thể lắp ghép chúng lại ể tạo nên các
hình dáng khác nhau của robot. Cũng có thể nhóm nhiều ối tượng vẽ riêng lẻ thành
một ối tượng có thể sử dụng nhiều lần và có thể thay ổi kích thước của chúng. Các ối
tượng có thể ược vẽ ngay tại menu này, hoặc import từ các phần mềm CAD khác nhau
như AutoCad, ProEngineer.. , lưu vào file ịnh dạng uôi *.STL, liên kết trực tiếp với Easy-Rob. 3.1.3. Arduino IDE
Arduino IDE là một phần mềm soạn thảo văn bản chính hãng, giúp bạn viết
code ể nạp vào bo mạch Arduino một cách nhanh chóng, dễ dàng và hoàn toàn miễn
phí. Bài viết dưới ây sẽ cũng cấp cho bạn chi tiết thông tin về Arduino IDE. lOMoAR cPSD| 45740413
Hình ảnh 10: Giao diện chính của phần mềm
➢ Một số tính năng thường xuyên sử dụng trên phần mềm:
− Nút kiểm tra chương trình (Verify): giúp dò lỗi phần code ịnh truyền xuống bo mạch Arduino.
− Nút tải oạn code vào bo mạch Arduino (Upload): giúp nhập oạn code vào bo mạch Arduino.
− Vùng lập trình: người dùng sẽ viết chương trình tại khu vực này.
− Thanh Menu: gồm những thẻ chức năng nằm trên cùng như File, Edit, Sketch, Tools, Help.
➢ Sử dụng ngôn ngữ lập trình C/C++ thân thiện với các lập trình viên:
Arduino IDE sử dụng ngôn ngữ lập trình C/C++ rất phổ biến trong giới lập
trình. Bất kỳ oạn code nào của C/C++ thì Arduino IDE ều có thể nhận dạng, giúp các
lập trình viên thuận tiện trong việc thiết kế chương trình lập cho các bo mạch Arduino.
➢ Hỗ trợ lập trình tốt cho bo mạch Arduino:
Arduino có một module quản lý bo mạch, nơi người dùng có thể chọn bo mạch
mà họ muốn làm việc cùng và có thể thay ổi bo mạch thông qua Menu. Quá trình sửa
ổi lựa chọn cũng liên tục tự ộng cập nhật ể các dữ liệu có sẵn trong bo mạch và dữ lOMoAR cPSD| 45740413
liệu sửa ổi ồng nhất với nhau. Bên cạnh ó, Arduino IDE cũng giúp bạn tìm ra lỗi từ
code mà bạn viết, qua ó giúp bạn sửa lỗi kịp thời tránh tình trạng bo mạch Arduino
làm việc với code lỗi quá lâu dẫn ến hư hỏng hoặc tốc ộ xử lý bị giảm sút.
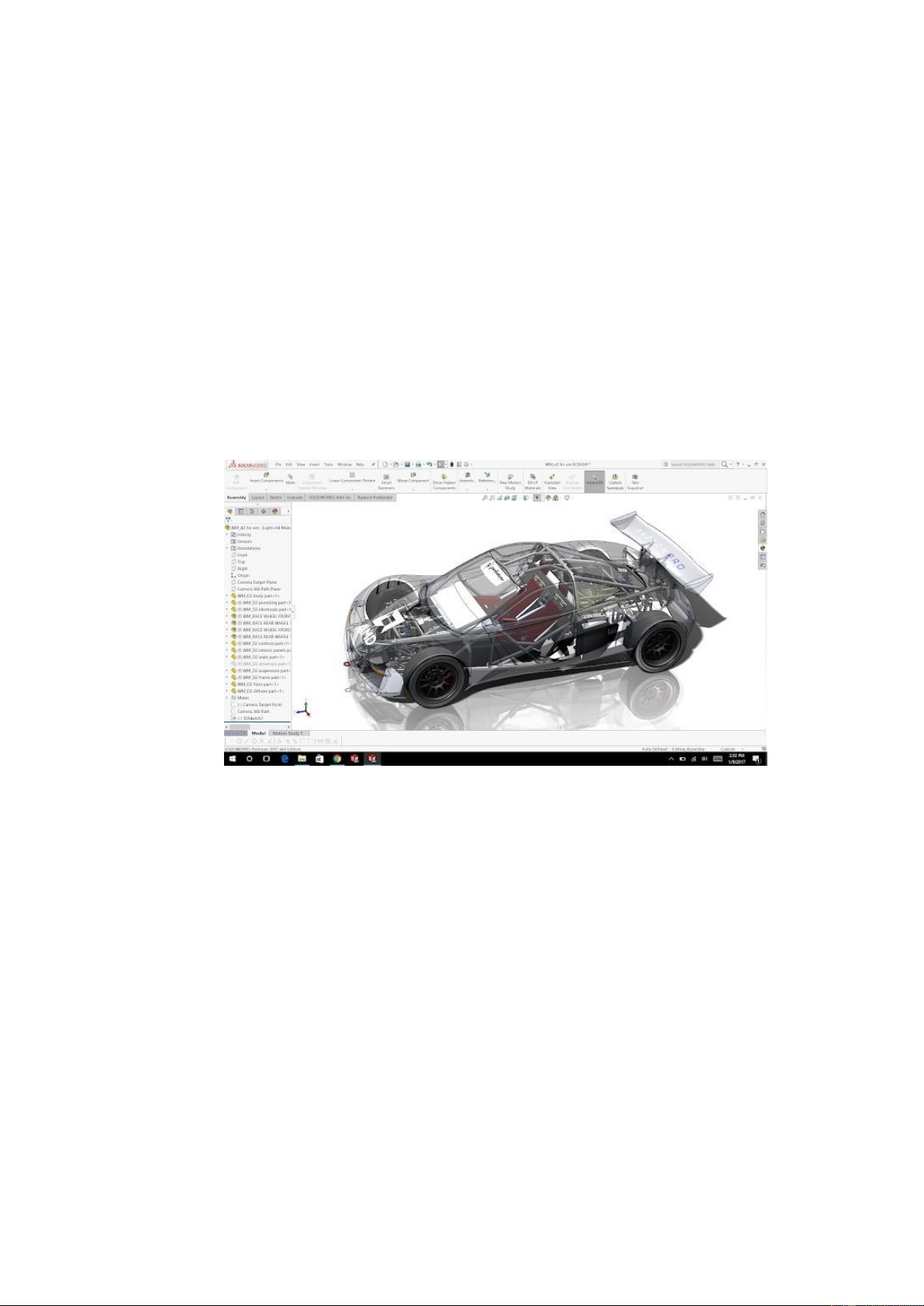
3.1.4. Phần mềm Solidworks
Solidworks là phần mềm quan trọng ể mô hình hóa 3D. Bạn có thể sử dụng nó
ể tạo mô hình sản phẩm của mình ở dạng 3D và thậm chí có thể phân tích sản phẩm ể
kiểm tra hoạt ộng của sản phẩm trong thế giới thực. Trước khi bất kỳ sản phẩm nào
ược sản xuất, nó ược kiểm tra hầu như bằng các phần mềm khác nhau.
Solidworks giúp bạn thực hiện mô hình 2D và 3D, và phần mềm CAD này
ược biết ến với tính dễ sử dụng và trực quan.
Hình ảnh 11: Giao diện chính Solidworks
Phần mềm SolidWorks cho phép bạn: - Thiết kế các
ối tượng 3D rất chính xác - Phát triển sản phẩm
- Kiểm tra kỹ thiết kế tệp của bạn
- Duy trì một thư viện các tệp 3D của bạn - Tạo bản vẽ 2D
- Tạo hình ảnh và hoạt ảnh của các ối tượng 3D của bạn
- Ước tính chi phí sản xuất các ối tượng 3D của bạn lOMoAR cPSD| 45740413 3.2. Sơ ồ khối Khốicảm biến Khối iều Khốinguồn khiển Khối ộng cơ Trong ó:
− Khối nguồn: Cấp nguồn cho hệ thống
− Khối iều khiển: Arduino Uno R3 xử lý và iều khiển mạch
− Khối cảm biến: Module HC05 Nhận tín hiệu từ
iện thoại qua bluetooth gửi ến khối iều khiển
− Khối ộng cơ: Servo nhận tín hiệu từ khối iều khiển sau ó bắt ầu hoạt ộng 3.3. Sơ ồ mạch
− Mô hình cánh tay robot của nhóm chúng em lOMoAR cPSD| 45740413
Hình ảnh 12: Mô hình cánh tay robot − Sơ ồ nguyên lý
Hình ảnh 13: Sơ ồ nguyên lý − Bản vẽ cơ khí lOMoAR cPSD| 45740413
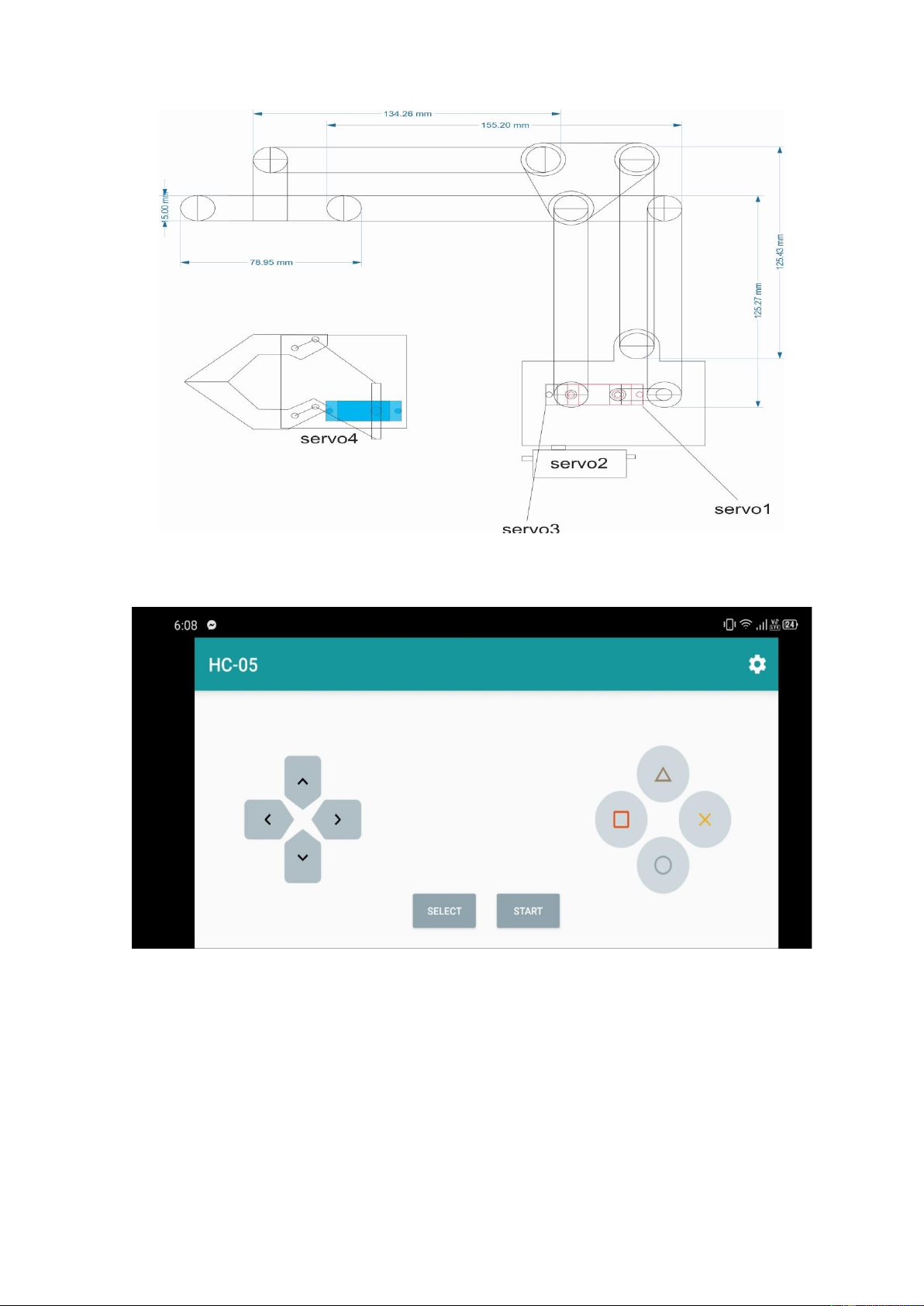
Hình ảnh 14: Bản vẽ cơ khí
− Giao diện trên smart phone
Hình ảnh 15: Giao diện trên Smart phone
− Thiết kế trên Solidworks
Tài liệu liên quan:
-

Đề cương Robot công nghiệp - Tổng quan và các loại Robot môn Robot công nghiệp | Trường Đại Học Thái Nguyên
80 40 -

Tổng hợp và Tìm hiểu về Robot MPL800II môn Robot công nghiệp | Trường Đại Học Thái Nguyên
123 62 -

Thiết Kế Đồ Án Robot Công Nghiệp KUKA môn Robot công nghiệp | Trường Đại Học Thái Nguyên
99 50 -

Đề cương robot công nghiệp | Đại học Thái Nguyên
306 153