Đề cương Robot công nghiệp - Tổng quan và các loại Robot môn Robot công nghiệp | Trường Đại Học Thái Nguyên
Robot chuỗi : là một chuỗi động học hở với một khâu cóo định gọi là đế và các khâu động, trong đó các khâu động được bố trí nối tiếp nhau. Mỗi khâu động được liên kết với nhau bởi các khớp động.
Môn: Robot công nghiệp 5 tài liệu
Trường: Đại học Thái Nguyên 386 tài liệu
Tác giả:
Preview text:
lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
ĐỀ CƯƠNG ROBOT CÔNG NGHIỆP
Câu 1: Cấu trúc chung của một robot công nghiệp
- Bộ phận điều khiển trung tâm
- Bộ phận điều khiển điện
- Bô phận điều khiển khớp
* Các thành phần cơ bản:
+ Tay máy: cơ cấu cơ khí các khâu khớp
+ Cơ cấu chấp hành: điện, thủy lực , khí nén
+ Hệ thống cảm biến: các sensor cảm biến, kiểm tra
+ Hệ thống điều khiển
* Về mặt vật lý, robot gồm: + Thân robot
+ Bệ cố đinh/ di động
+ Hệ thống điều khiển
+ Tác động cuối (tay máy) + Nguồn nuôi robot Câu 2: -
Robot chuỗi : là một chuỗi động học hở với một khâu cóo định gọi là đế và các khâu
động, trong đó các khâu động được bố trí nối tiếp nhau. Mỗi khâu động được liên kết với nhau bởi các khớp động. -
Robot song song: là một chuỗi động học kín, ở đó mỗi khâu luôn được liên kết với ít nhất hai khâu khác.
Câi 3: Ưu , nhược điểm mà robot công nghiệp : * Ưu điểm:
- Tăng hiệu suất lao động, độ an toàn, hiệu quả, chất lượng, sự ổn định. lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
- Có thể làm việc ở một môi trường độc hại.
- Không cần làm việc ở một môi trường thoải mái.
- Hoạt động liên tục mà không mỏi.
- Độ chính xác lặp lại liên tục, không có sai số.
- Có thể thay thế công nhân tạo ra vấn đề kinh tế.
- Có thể thực hiện các quy trình và nhiệm vụ đồng thời. * Nhược điểm:
- Không có phản ứng với các vấn đề bất chợt xảy ra.
- Những vấn đề nhạy cảm, bậc tự do hạn chế chuyển động.
- Đắt tiền : chi phí thiết lập, giá cài đặt, cần thiết chp việc đào tạo, lập trình.
Câu 4: Robot công nghiệp cần mấy bậc tự do? Vì sao?
- Để di chuyển và định hướng tùy hướng trong không gian 3 chiều, thì robot công nghiệp cần 6
bậc tự do: 3 bậc định vị, 3 bậc định hướng.
- Còn với robot nâng hạ, xếp đỡ thì cần ít bậc tự do hơn.
Câu 5: Thế nào là không gian công tác, không gian khớp, tọa độ suy rộng:
- Không gian công tác: là không gian mà tay kẹp có thể định hướng và định vị một cách thoải mái và chính xác nhất.
- Không gian khớp: là khoảng không gian hoạt động của khớp.
- Tọa độ suy rộng (trừ các tọa độ x,y,z) : là các tham số độc lập bao gồm cả tọa độ và các đại
lượng vật lý. Là các đại lượng nhằm mô tả đầy đủ trạng thái của hệ thống ( vd : các góc θ, ϕ,...)
Câu 6: Phân tích và giải thích 6 bậc tự do được dủ dụng trong robot.
- Một robot công nghiệp điển hình có 6 bậc tự do mô phỏng cánh tay của con người, cho phép
robot hoạt động thoải mái trong không gian, không hạn chế phương hướng. Tác dộng cuối của
robot có thể xác định đúng vị trí và hướng đi chính xác đến vật.
- A1-A3: xác định vị trí và phỏng sinh.
- A4-A6: có các khớp cầu nhằm định hướng. lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
Câu 7: Điều gì quyết định dạng không gian làm việc của robot:
- Chiều dài và các bậc tự do của khớp.
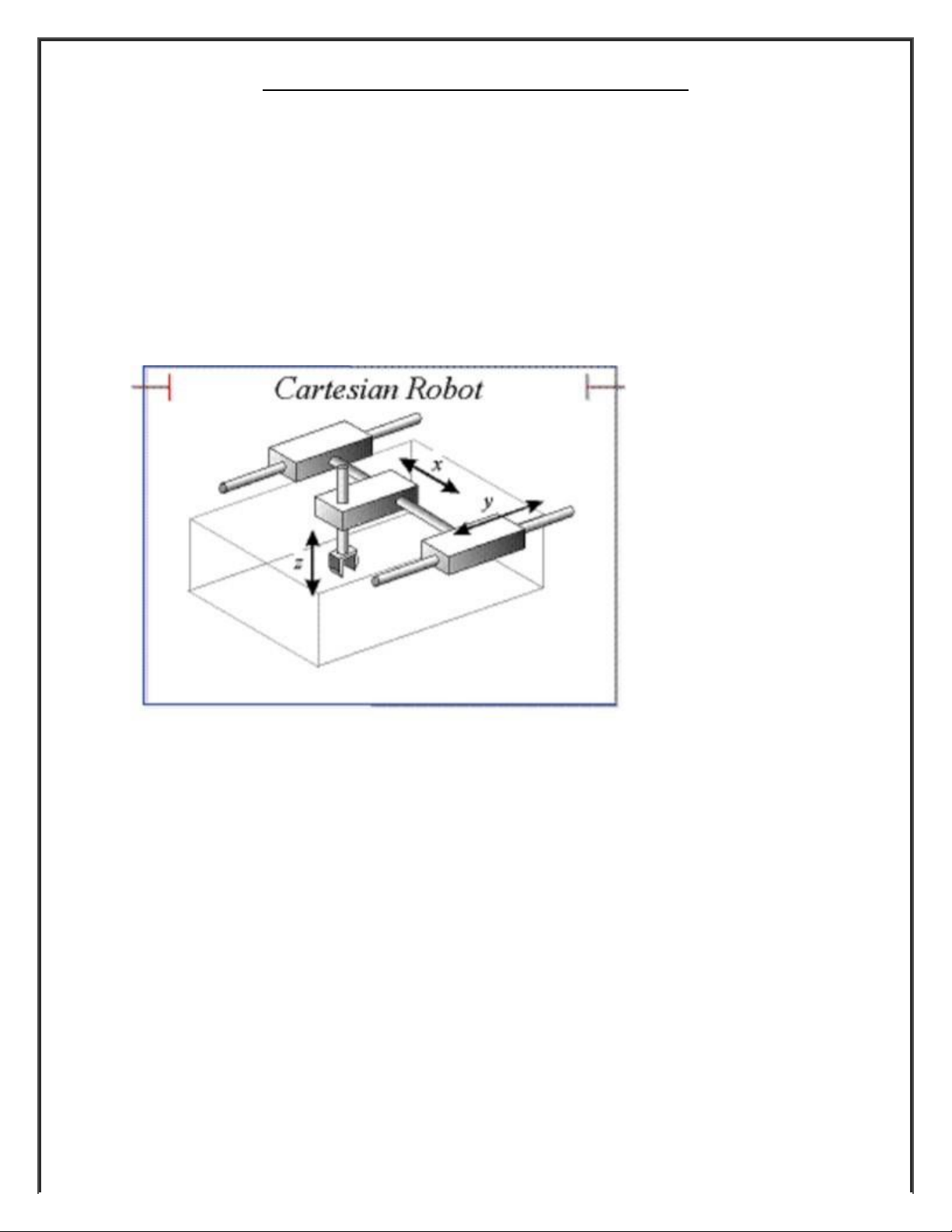
Câu 8: Tay máy kiểu tọa độ đề các, ưu và nhược điểm:
- Đặc điểm: Dùng 3 khớp trượt, tạo chuyển động thẳng, song song với 3 trục tọa độ. Vùng làm
việc có dạng hình hộp chữ nhật.
- Ưu và nhược điểm: độ cứng vững cao nhưng ít khéo léo.
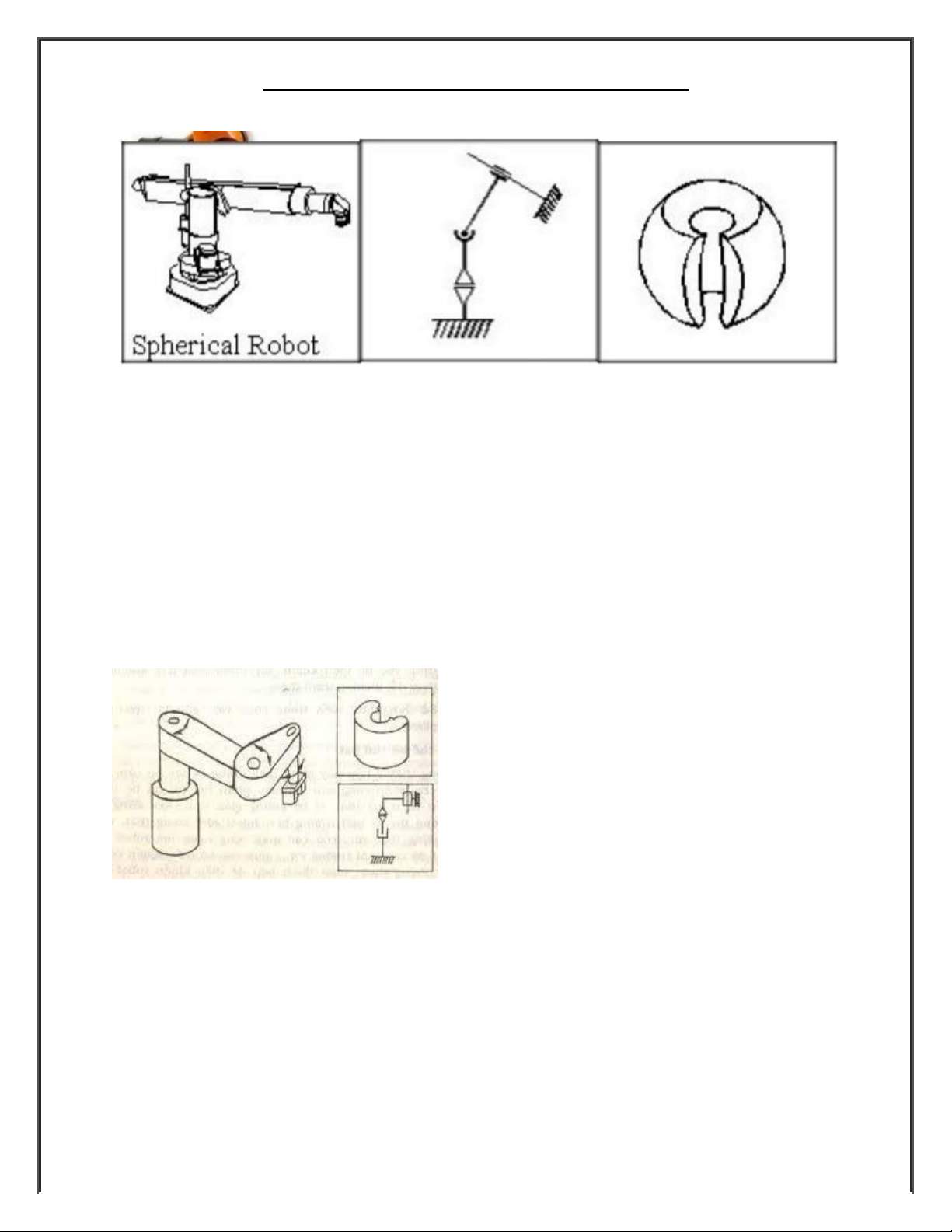
Câu 9: Tay máy kiểu tọa độ cầu, ưu và nhược điểm:
- Đặc điểm: 3 bậc chuyển động cơ bản gồm : 1 khớp tịnh tiến và 2 trục quay. Vùng làm việc là khối cầu rỗng.
- Ưu và nhược điểm: Độ cứng vững thấp hơn tay máy tọa độ đề các, độ chính xác định vị phụ thuộc vào tầm với. lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
Câu 10: Tay máy scara có đặc điểm gì? Ưu và nhược điểm: - Đặc điểm:
+ Gồm 2 khớp quay, 1 khớp trượt ( hoặc 3 quay, 1 trượt) , cả 3 khớp đều có trục song song với nhau.
+ Có 2 khớp xoay song song cho phép thao tác trên mặt phẳng.
- Ưu điểm: Đứng vững theo phương thẳng đứng- Nhược điểm: kém cứng vững theo phương ngang.
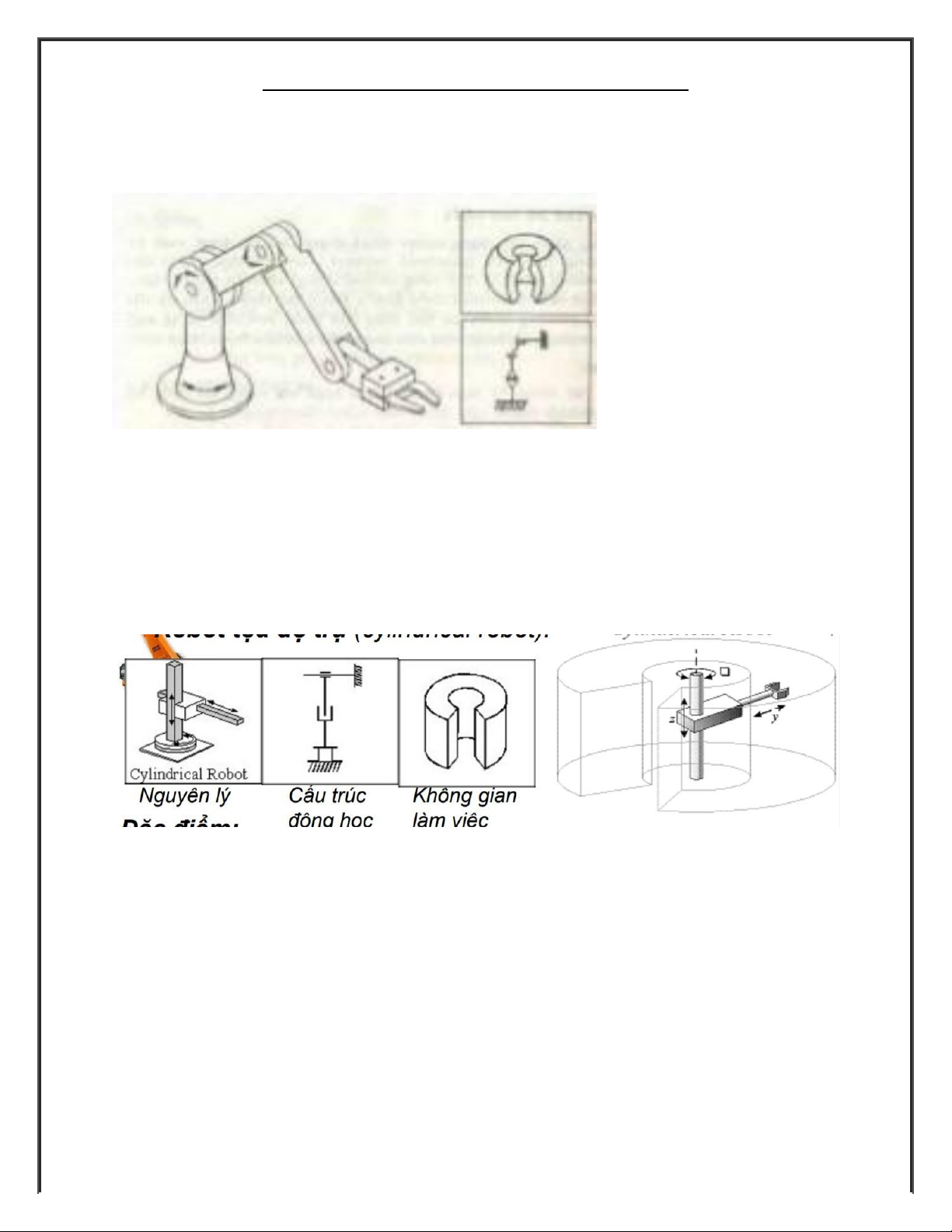
Câu 11: Tay máy kiểu phỏng sinh, ưu và nhược điểm:
- Đặc điểm: Cả 3 khớp là khớp quay, trong đó trục thứ nhất vuông góc với hai trục kia. Khớp
thứ2 gọi là khớp vai, khớp thứ 3 gọi và khớp khuỷu, nối cẳng tay với khuỷu tay. Vùng làm việc
gần giống một phần khối cầu. lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
- Ưu và nhược điểm: Tay máy làm việc rất khéo léo, nhưng độ chính xác định vị phụ thuộc vào
vị trí của phần công tác trong vùng làm việc.
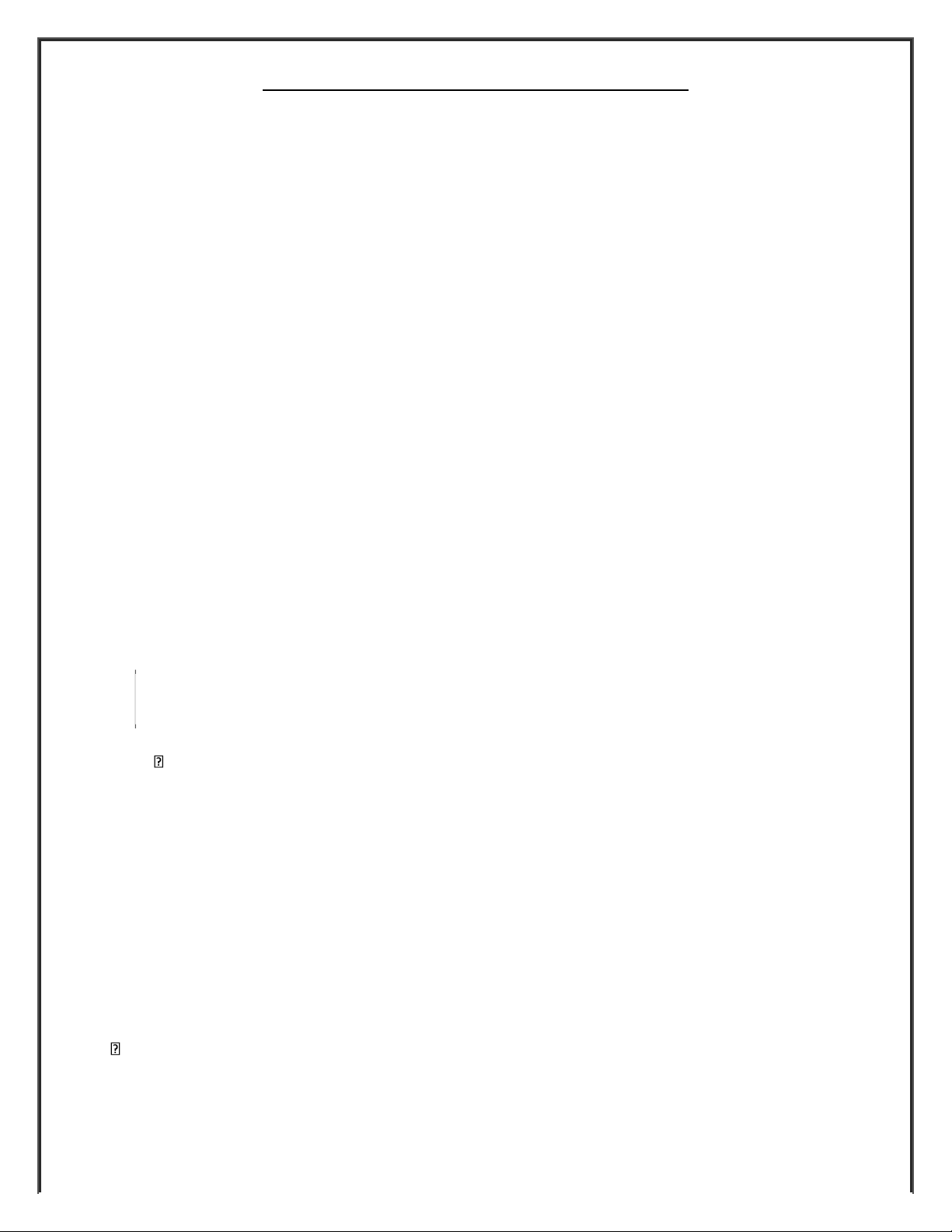
Câu 12: Tay máy kiểu tọa độ trụ, ưu và nhược điểm:
- Đặc điểm: 3 trục chuyển động cơ bản : 2 trục chuyển động tịnh tiến và 1 trục chuyển động
quay. Vùng làm việc có dạng hình trụ rỗng.
- Ưu, nhược điểm: Độ cứng vững cơ học tốt, thích hợp với tải trọng nặng, nhưng độ chính xác
định vị góc trong mặt phẳng nằm ngang giảm khi tầm với tăng.
Câu 13:Sự khác nhau giữa khâu và khớp trong robot công nghiệp:
- Khâu là một vật rắn tuyệt đối, được nối với nhau bởi nhiều khớp động.
- Khớp động dùng để nối động hai khâu và cho phép các khâu này thực hiện một số chuyển động tương đối.
- Các loại khớp: khớp trượt và khớp quay. Mỗi khớp là một bậc tự do.
- Khớp khống chế các bậc tự do. lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
- Các khâu di chuyển và quay quanh ba trục x,y,z.
Câu 14: Phương pháp mô tả động học hệ nhiều vật trong không gian ba chiều:
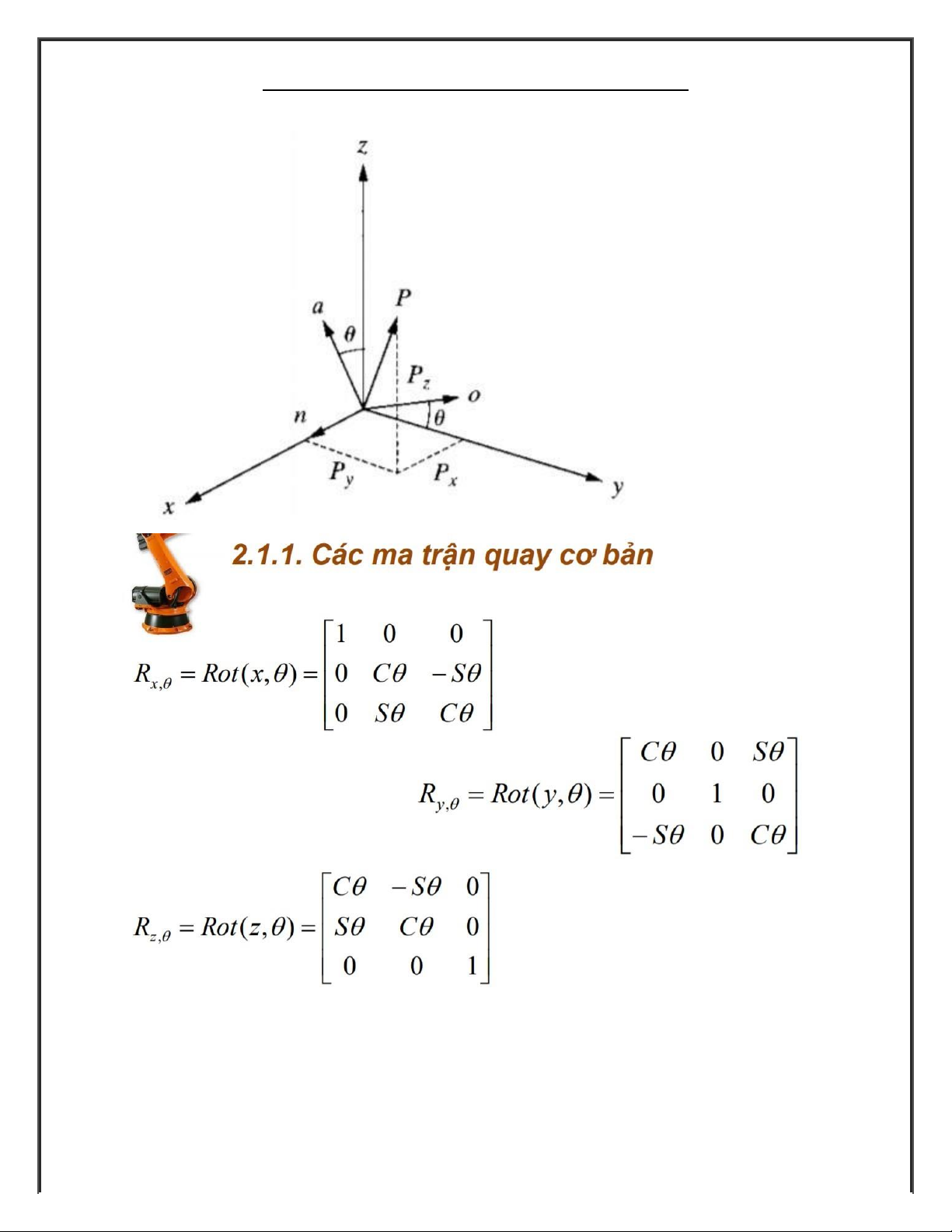
Câu 15: Trình bày sự hình thành ma trận quay:
- Hệ quy chiếu cơ sở : OoXoYoZo
- Hệ trục tọa độ địa phương: OiXiYiZi
Ta có P1(x1,y1,z1) và Po(xo, yo, zo) là các tọa độ đã biết. Po=?P1
+ io, jo, ko , i1,j1, k1 là các vecto định vị nằm trên x, y, z. Po = xo*io + yo*jo +zo*ko P1 = x1*i1 + y1*j1 + z1*k1
Xo = P1*io = ( x1*i1 + y1*j1 + z1*k1 ) * io = x1* (i1*io) + y1*(j1*jo) + z1*(k1*ko)
Yo = P1*jo = ( x1*i1 + y1*j1 + z1*k1 ) * jo= x1*(i1*jo) + y1*(j1*jo) + z1*(k1*jo)
Zo = P1*ko = ( x1*i1 + y1*j1 + z1*k1 ) * ko = x1*(i1*ko) + y1*(j1*ko) + z1*(k1*ko)
xo i1∗io j1∗io k 1∗io x 1 ] [ ] [ yo =
i1∗jo j1∗jo k1∗jo * ] y1
zo i1∗ko j1∗ko k 1∗ko z1 Po = R * P1 lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
Câu 16: Ma trận cosin chỉ phương:
i1∗io j1∗io k 1∗io
cos (x 1, xo) cos ( y1, xo) cos (z1, xo) ] [ ]
R = i1∗jo j1∗jo k1∗jo =
cos (x1, yo) cos (y 1, yo) cos (z 1, yo)
i1∗ko j1∗ko k 1∗ko cos (x1,zo) cos (y 1, zo) cos (z1,zo)
Là ma trận xác định hướng của Oo so với O1
+ cosin: tích vô hướng của hai vecto:
Vd: i1*io = |i1|*|io|* cos(i1,io) = 1*1* cos(i1,io)
Câu 17: Các ma trận quay cơ bản: lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
Câu 18: Hệ tọa độ đồng nhất, vai trò và cách biểu diễn:
- Hệ tọa độ đồng nhất: lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
Câu 21: Các phương pháp mô tả hướng tối thiểu (MRO) , trình bày phương pháp Euler làm ví
dụ, có bao nhiêu bộ góc Euler, liệt kê.
- Các phương pháp mô tả hướng tối thiểu (MRO - Minimal Representation of Orientation ): 2 + Bộ góc Euler
+ Bộ góc RPY ( Roll-Pitch-Yaw)
- Bộ góc Euler: Cách quay liên tiếp 3 lần qua 3 trục tọa độ hiện thời: Rxyz, Ryxz, Rzyx
+ Có thể xây dựng 12 bộ góc: +Bộ góc X,Y,Z:
. Quay quanh Z hiện thời một góc α
. Quay quanh X hiện thời một góc β
. Quay quanh Y hiện thời một góc ɣ
Câu 23: So sánh sự giống và khác nhau giữa phép quay Euler và phép quay RPY
- Sử dụng bộ 3 góc : là đại lượng / số lượng ít nhát, tối ưu nhất.
* Giống : mô tả hướng một cách tối thiểu. * Khác:
- RPY : mô tả gốc của một hệ trục tọa độ ban đầu ( 1 bộ duy nhất: zyx ) định hướng khi quay các bộ định thời.
- Euler: quay liên tiếp 3 lần qua 3 trục tọa độ định thời.
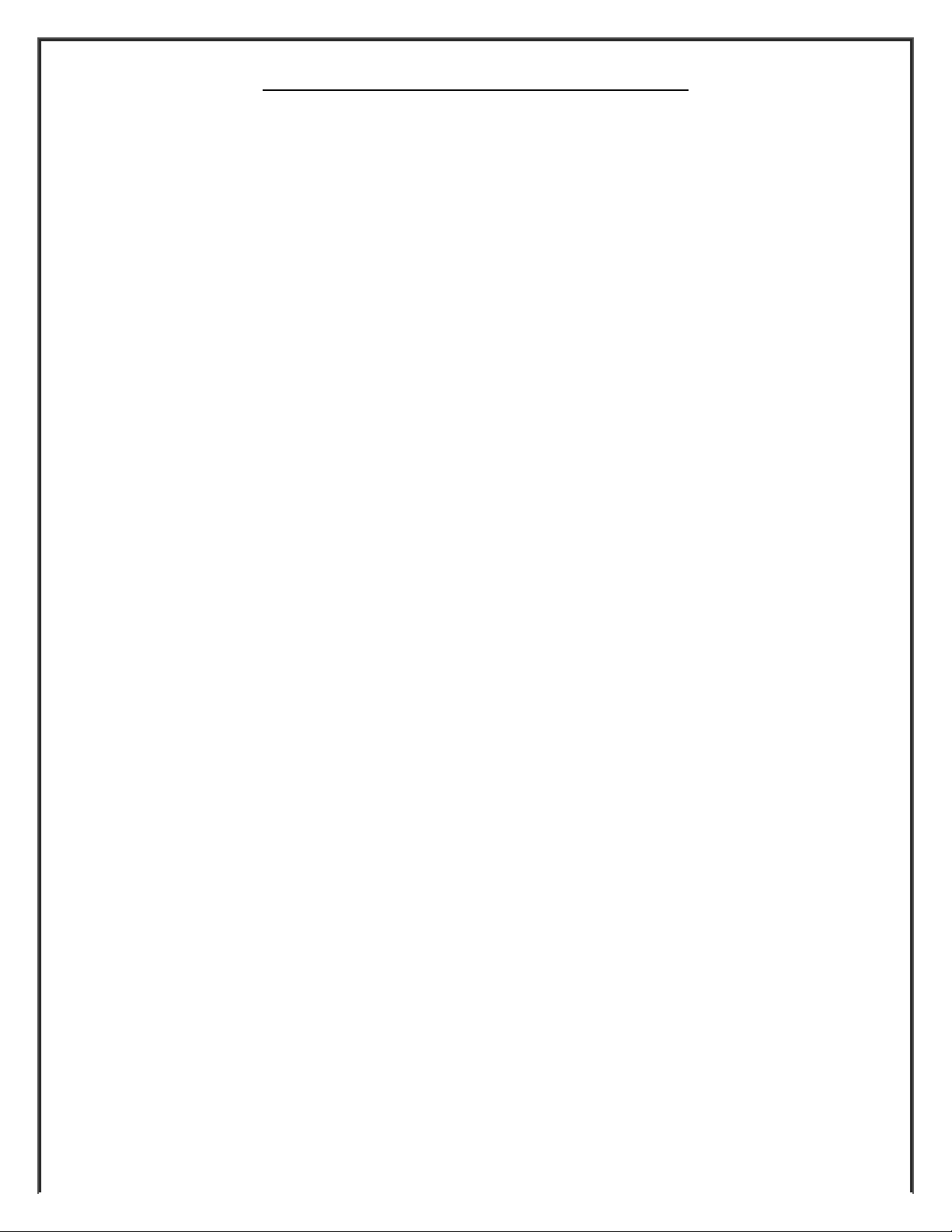
Câu 24: Quy tắc DH ( Dernarit-Hatenberg ): đặt hệ tọa độ lên các khớp của robot. - Vẽ hình
- 4 bước dịch chân hệ trục tọa độ : Rz, Tz, Tx, Rx
+ R(z,α) : là phép quay quanh trục z một góc α để đưa x(i-1) về cùng phương với xi.
+ T(z,d) : tịnh tiến theo phương z một lượng bằng d, để hệ tọa độ thu được ở mức trước lên cùng cao độ với Oi.
+ T(x,a) : tịnh tiến theo phương x một lượng bằng a để đưa O(i-1) về trùng với Oi. lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
+ R(x,β): là phép quay quanh trục x một góc β để đưa z(i-1) về trùng với zi
- Lập ma trận: là tích của 4 ma trận cơ sở: R(z,α)* T(z,d)* T(x,a)* R(x,β) Ai-1 i =
Câu 28: Phương trình động học thuận:
- Bài toán động học thuận nhằm mô tả vị trí và hướng của phần công tác hằng số dưới dạng biến khớp. F(q) = P - Trong đó:
+ f(q) : xây dựng hàm số biểu diễn vị trí và hướng của tay kẹp mô tả dưới dạng tổng quát.
+ P: mô tả giá trị cụ thể của tay kẹp tại vị trí nào đó.
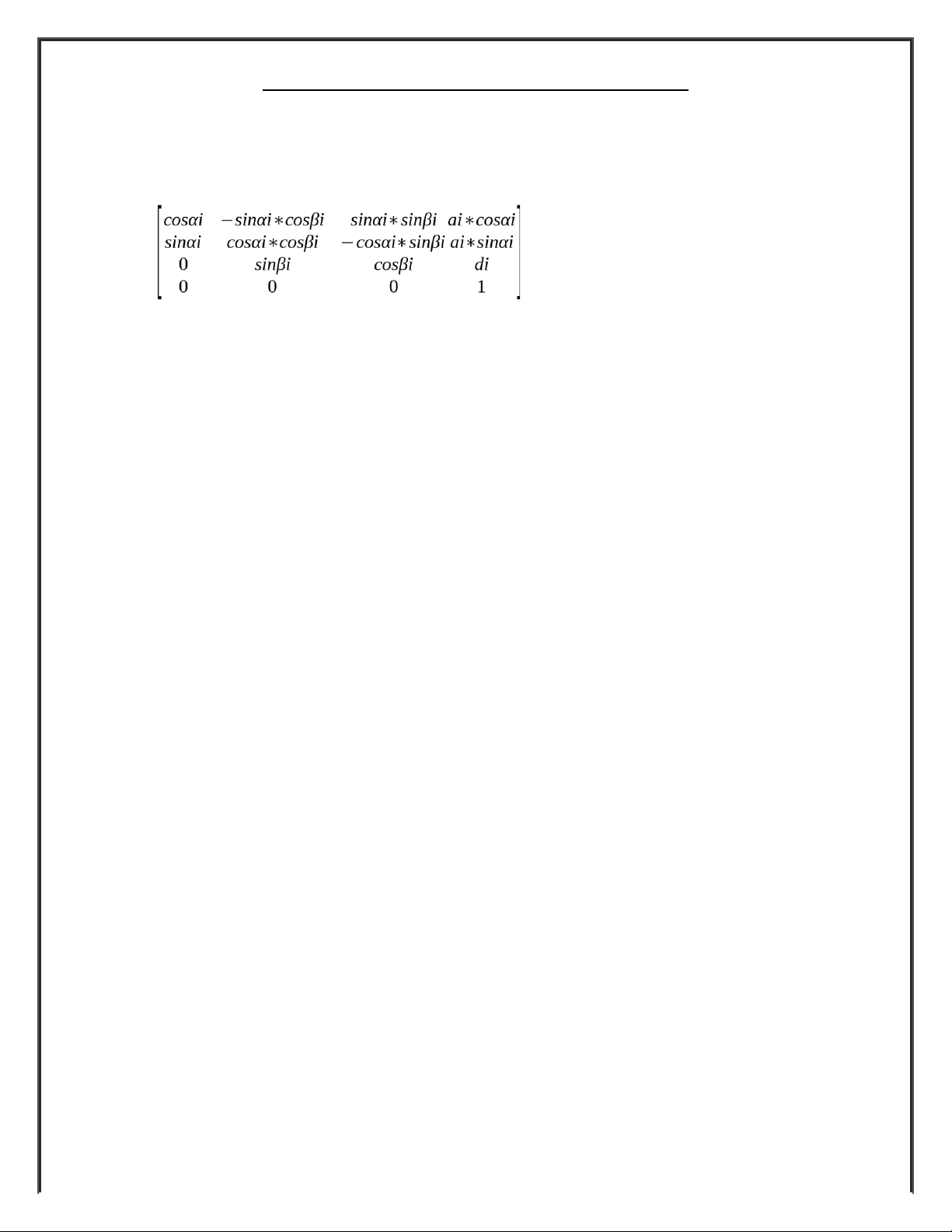
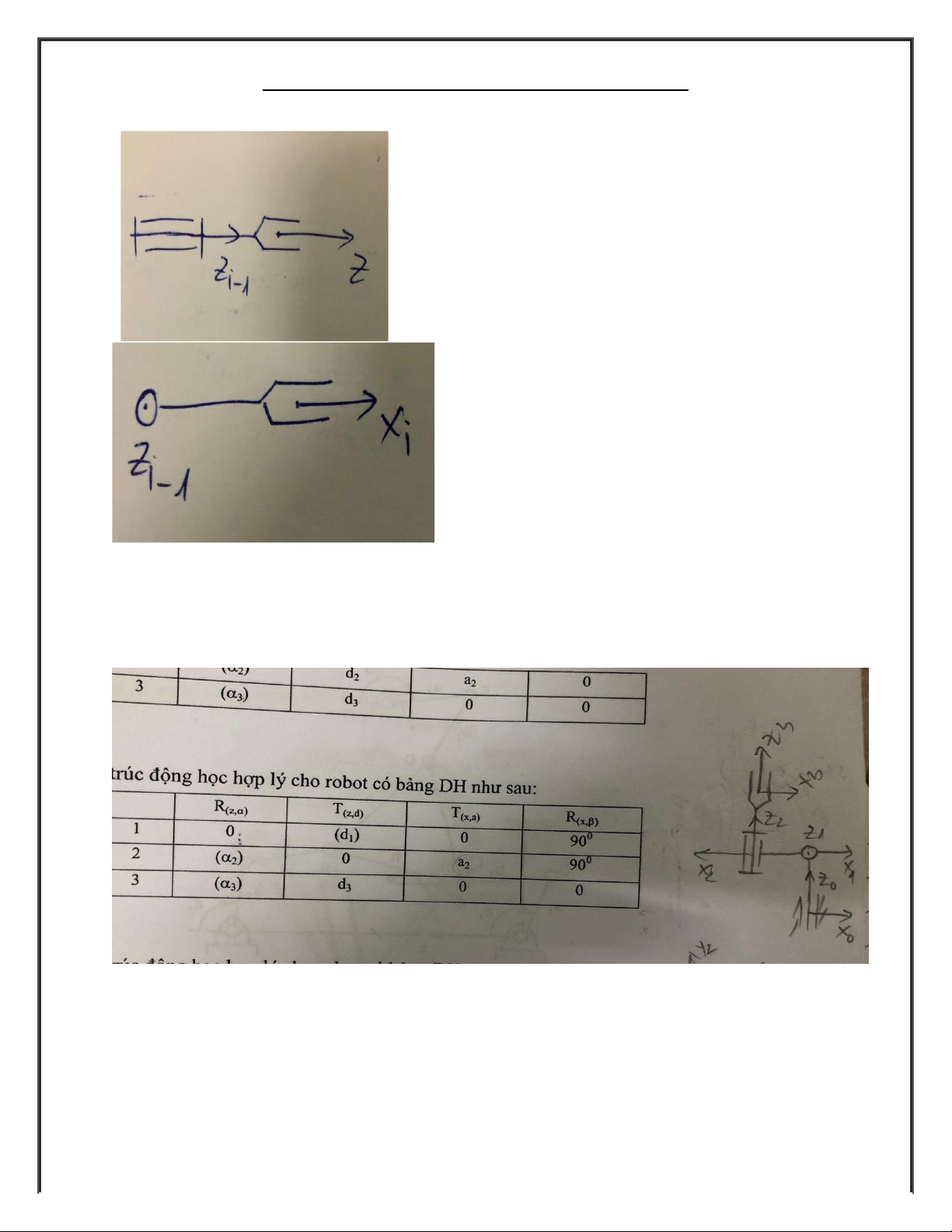
Câu 29: Quy tắc xác định hệ tọa độ động gắn với bàn kẹp: - Đối với 2 bàn kẹp :
+ trục hướng ra là trục Z: + trục Z lao ra ngoài không gian: lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT Câu 30:
- Mỗi một bảng DH cho trước mô tả một cấu trúc duy nhất, xác định loại khớp và hệ trục tọa độ
của các khớp, xác dịnh hướng và vị trí mà tay kẹp hướng tới.
- Vd robot 3 bậc tự do minh họa:
Câu 32: Bài toán động học ngược: lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
- Cơ sở xây dựng: Bài toán thuận của động học tay máy cho phép xác định thế của phần công
tác và có thể cả vùng làm việc của nó theo quan hệ với các thông số động học của các cặp khâu – khớp.
- Mục đích : tìm các biến khớp của tay máy khi biết vị trí khâu tác động cuối của tay máy.
- Điều kiện tồn tại nghiệm: bài toán động học ngược có tính đa nghiệm ( phụ thuộc vào số biến
khớp và các tham số khác kết cấu)
+ phải nội suy quỹ đạo +
- Các phương pháp giải :
+ Phương pháp giải tích : tính toán lâu nhưng kết quả hoàn toàn chính xác.
+ Phương pháp số: tính toán nhanh trên máy tính, toàn bộ quá trình giải dựa vào các vòng lặp
và kết quả lấy gần đúng, đáp số là số liệu cụ thể ( trong thực tế thì là kết quả chính xác )
- Cách thức giải bài toán động học ngược bằng phương pháp GRG ( Generalized Reduced
Gradient ) : phương pháp giải toán tối ưu
+ là phương pháp số: lấy đạo hàm, sử lý bài toán qua nhiều vòng lặp ( lấy xấp xỉ biểu thức,
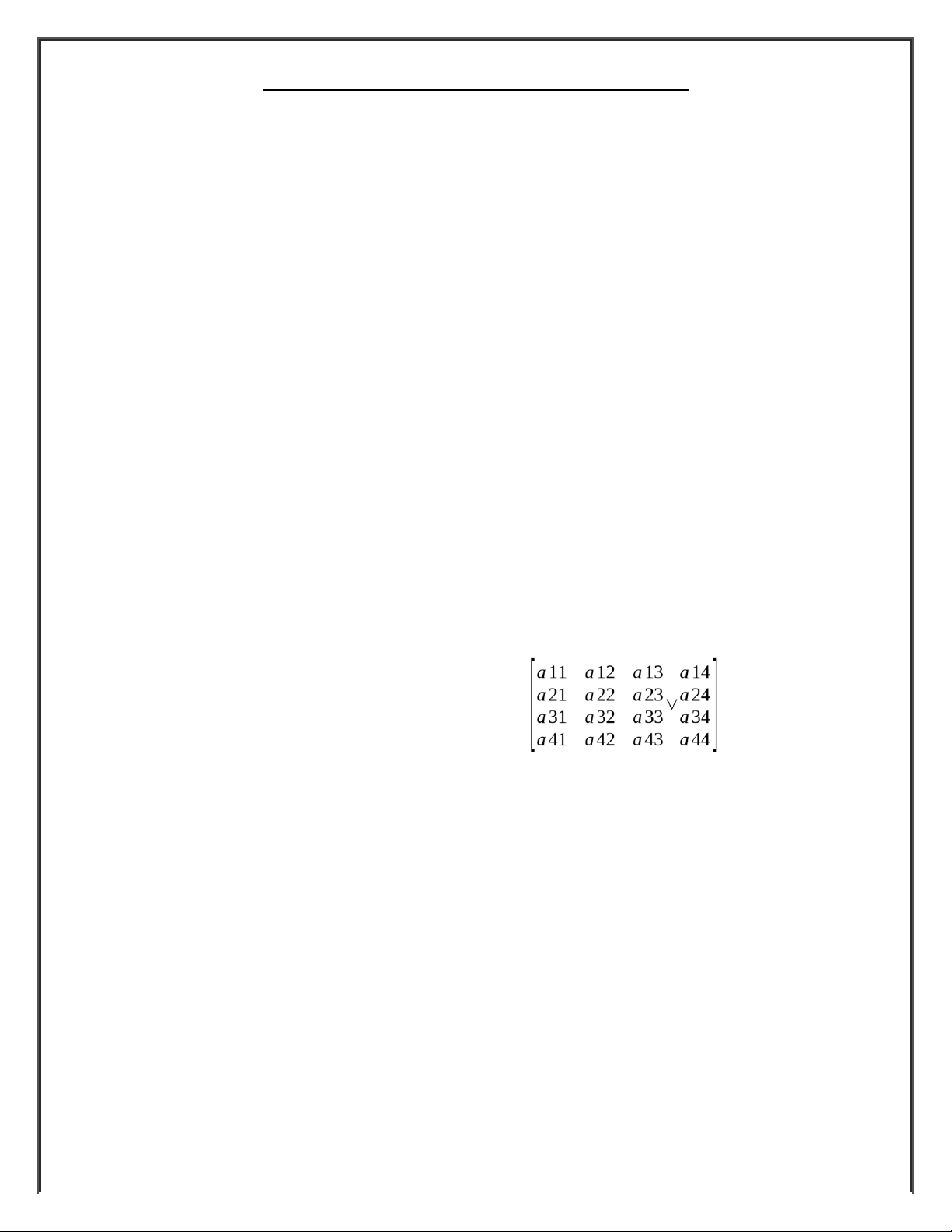
sau đó đạo hàm ) ra tiếp tuyến của đường bậc 2. + f(q)=P nx sx ax Px
[. M a trận tọa độ tổng quát f(q): ny sy ] ay∨Py
= -> ma trận tọa nz sz az Pz độ thực (P)
+ Các phương trình mô tả vị trí : Px=a14 Px−a14=0 { lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT { .Py=a24 Py−a24=0 Pz=a34 Pz−a34=0
+ Các phương trình mô tả hướng : lấy bất kỳ 3 thành phần, suy ra các phần còn lại. nx=a11 nx−a11=0 .vd { ax=a13
ax−a13=0 az=a33 az−a33=0
( không được lấy 3 vị trí trên 1 đường thẳng, 3 thành phần chỉ chiếu lên truc x/y/z -> không xác
định được tọa độ , lấy theo hình tam giác) + Bình phương hai vế : ( Px−a14)2=0 ( Py−a24)2=0 ( Pz−a34 )2=0
{. 2 (nx−a11) =0 (ax−a13)2=0 (az−a33 )2=0
+ Cộng hết vế trái với nhau:
L = ( Px−a14 )2 + ( Py−a24 )2 + ( Pz−a34 )2 + (nx−a11)2 + (ax−a13)2 + (az−a33)2= 0 L
tiến tới 0, qua pguowng pháp GRG tìm ra các biến khớp q1, q2,... qn. lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
Câu: So sánh bài toán động học thuận với bài toán động học ngược :
- Bài toán động học thuận: Sử dụng định luật DH: đặt hệ tọa độ, sau đó lập bảng DH, lập ma trận.
- Bài toán động học ngược : Cho hướng và vị trí, tìm ra các biến khớp.
+ Giải hệ phương trình sin-cos, xuất hiện nhiều ẩn số trong phương trình; 1 hệ có 6 phương
trình lượng giác, bài toán có tính đa nghiệm. Câu 47:
- Bậc tự do của robot là các thống số đọc lập cần thiết để xác định hoàn toàn vị trí của cơ cấu.
- Các khớp khống chế các bậc tự do.
Vd: khớp trượt có 1 DOF, khớp cầu quay theo 3 trục x,y,z có 3 DOF...
Câu 51: Quy tắc mô hình hóa động học robot song song:
- Robot song song có một tấm tĩnh và tấm động, xuất hiện các tham số, tạo thành từng vòng kín.
- Tham số kết cấu của tấm động và tấm tĩnh : r,...
- Tham số về vị trí và hướng của tấm động và tấm tĩnh : đại diện cho tấm động là hệ trục tọa
tọađộ địa phương ; hướng là bộ góc RPY (α,β,ɣ) - Tham số ở các chân :
+ Khâu: độ dài của các thanh cứng.
+ Khớp: các biến khớp chủ động hoặc thụ động.
Câu 52: Các thành phần cơ bản trong mô hình động học robot song song: - Bệ cố định
- Chuỗi động học: khâu, khớp - Tấm động
Câu 53: So sánh robot chuỗi và robot song song: *Giống: lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
- Đều sử dụng khâu, khớp để hoạt động. * Khác nhau:
- Robot chuỗi là chuỗi động học hở, sử dụng khớp loại 5 là khớp quay và khớp trượt.
- Robot song song là cơ cấu vòng kín, nhiều chân, sử dụng tất cả các loại khớp, vững vàng hơn,
nhưng không gian làm viêc hạn chế hơn robot chuỗi.
Câu 54: Robot song song thường sử dụng những loại khớp nào: - Khớp quay (R) : 1DOF
- Khớp lăng trụ (P): 1DOF - Khớp trụ (C): 2DOF
- khớp ren (H): 2 chuyển động trượt và quay phụ thuộc vào nhau: 1DOF
- Khớp cầu (S) : 3 DOF: quay xung quanh 3 trục x,y,z
- Khớp phẳng (E): tịnh tiến theo phương x,y và quay theo phương z.
- Khớp cardan (U) : 2DOF- quay theo 2 mặt phẳng
Câu 55: Đặc điểm của robot song song, ứng dụng: - Đặc điểm:
+ Robot song song là cơ cấu vòng kín, trong đó khâu tác động cuối được liên kết với nền ít nhất
là 2 chuỗi động học độc lập.
+ Robot song song có nhiều chân,
+ Gồm: nền cố định, chuỗi động học, bệ di động ( tác động cuối) - Ứng dụng:
+ Dùng để năng hạ đồ vật, di chuyển đồ vật từ vị trí này sang vị trí khác,...
Câu 56: Cách tính bậc tự do của robot song song: j F = ʎ*(n-j-1) +∑ fi i=1 lOMoAR cPSD| 22014077
Xem tài liệu miễn phí tại nhóm facebook : Share tài liệu TNUT
- F: số bậc tự do của cơ cấu
- ʎ : số bậc tự do trong không gian làm viêc của cơ cấu
- n : số khâu, kể cả khâu cố định - J : số khớp
- fi : số chuyển động tương đối được phép của khớp i (số bậc tự do của khớp đó)
Câu : Quy trình động học cho robot song song:
B1: Mô hình hóa động học
B2: Tách từng chân của robot, đặt hệ tọa độ Oo, O1
B3: Viết phương trình vòng kín cho từng chân
f 1 (q )=P .……
{ f 6 (q )=P
B4: Khai triển ra x,y,z ( chiếu lên các trục x,y,z)
B5: Giải hệ phương trình, tìm các ẩn số.
Câu : Tại sao phải nội suy quỹ đạo: -
Để điều khiển robot, chủ yếu là quay, phối hợp các chuyển động với nhau, chuyển trạng
thái từ không gian ngoài sang không gian khớp. -
Tại vì: trên các khớp của Robot được điều khiển bởi các động cơ quay, tịnh tiến ( trượt
xy lanh ) điều khiển chuyển động tổng hợp của tay kẹp.
điều khiển nội suy để có cơ sở điều khiển từng khớp cho robot x,y,z,Px,Py,Pz
xác định vị trí mong muốn của tay kẹp tương ứng với dịa diểm trên quỹ đạo.
Tài liệu liên quan:
-

Báo cáo Đồ án môn Robot Công nghiệp: Mô hình Cánh tay 4 bậc môn Robot công nghiệp | Trường Đại Học Thái Nguyên
218 109 -

Tổng hợp và Tìm hiểu về Robot MPL800II môn Robot công nghiệp | Trường Đại Học Thái Nguyên
123 62 -

Thiết Kế Đồ Án Robot Công Nghiệp KUKA môn Robot công nghiệp | Trường Đại Học Thái Nguyên
99 50 -

Đề cương robot công nghiệp | Đại học Thái Nguyên
306 153