Báo cáo Đo trọng lượng bằng cảm biến điện trở lực căng (loadcell) môn Đo lường điện | Trường Đại học Bách Khoa Hà Nội
Loadcell được cấu tạo bởi hai thành phần là: Strain gage và Load. Một loadcell thường bao gồm các strain gage được dán vào bề mặt của thân loadcell. Tài liệu được sưu tầm gồm 20 trang, giúp các bạn ôn luyện và phục vụ cho việc học tập, đạt kết quả tốt. Mời các bạn đón xem!
Môn: Đo lường điện 12 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.6 K tài liệu
Tác giả:








Preview text:
ĐẠI HỌC BÁCH KHOA HÀ NỘI
TRƯỜNG ĐIỆN – ĐIỆN TỬ --- --- BÁO CÁO
Đo trọng lượng bằng cảm biến điện trở lực căng (loadcell)
Giáo viên hướng dẫn : Nguyễn Thanh Hường Nhóm: 10 Lớp: 144043 Mục lục
I. Giới thiệu thành viên……………………………………3
II. Sơ đồ khối của mạch…………………………………...3
III. Giới thiệu về loadcell………………………………….3
1. Thành phần cấu tạo của loadcell ……………………….3
2. Nguyên lý hoạt động …………………………………...5
3. Các thông số của loadcell……………………………….6
IV.Giới thiệu về IC HX711………………………………..7
1. Tổng quát về IC HX711…………………………………7
2. Chức năng bộ tiền khuếch đại (Preamplifier)…………..7
3. Sơ đồ chân của HX711…………………………………8
4. Các sử dụng ADC………………………………………9
5. Xung nhịp clock và đầu vào điều khiển…………….....10
6. Reset…………………………………………………...10
7. Nguyên lý làm việc của mạch …………………………10
8. Thông số kỹ thuật………………………………………11
V.Giới thiệu về Arduino UNO R3……………………… 12
1. Tổng quan…………………………………….............12
2. Bộ nhớ……………………………………....................13
3. Đặc tính của Arduino Uno R3 .......................................13
4. Sơ đồ chân của Arduino Uno R3 ……………………...14
VI. Giới thiệu về LCD 1602…………………………….15
1. Sơ đồ chân của LCD 1602……………………………15
2. Thông số kỹ thuật…………………………………….17
3. Giao tiếp với LCD……………………………………17
VII. Kết quả đo thực tế ...................................................18
VIII. Lời kết………………………………………..........20
I. Giới thiệu thành viên
• Đỗ Đức Toàn - 20212422
• Vũ Minh Hương - 20212411 • Hoàng Anh Tú- 20212425
• Phạm Hoàng Anh - 20212396
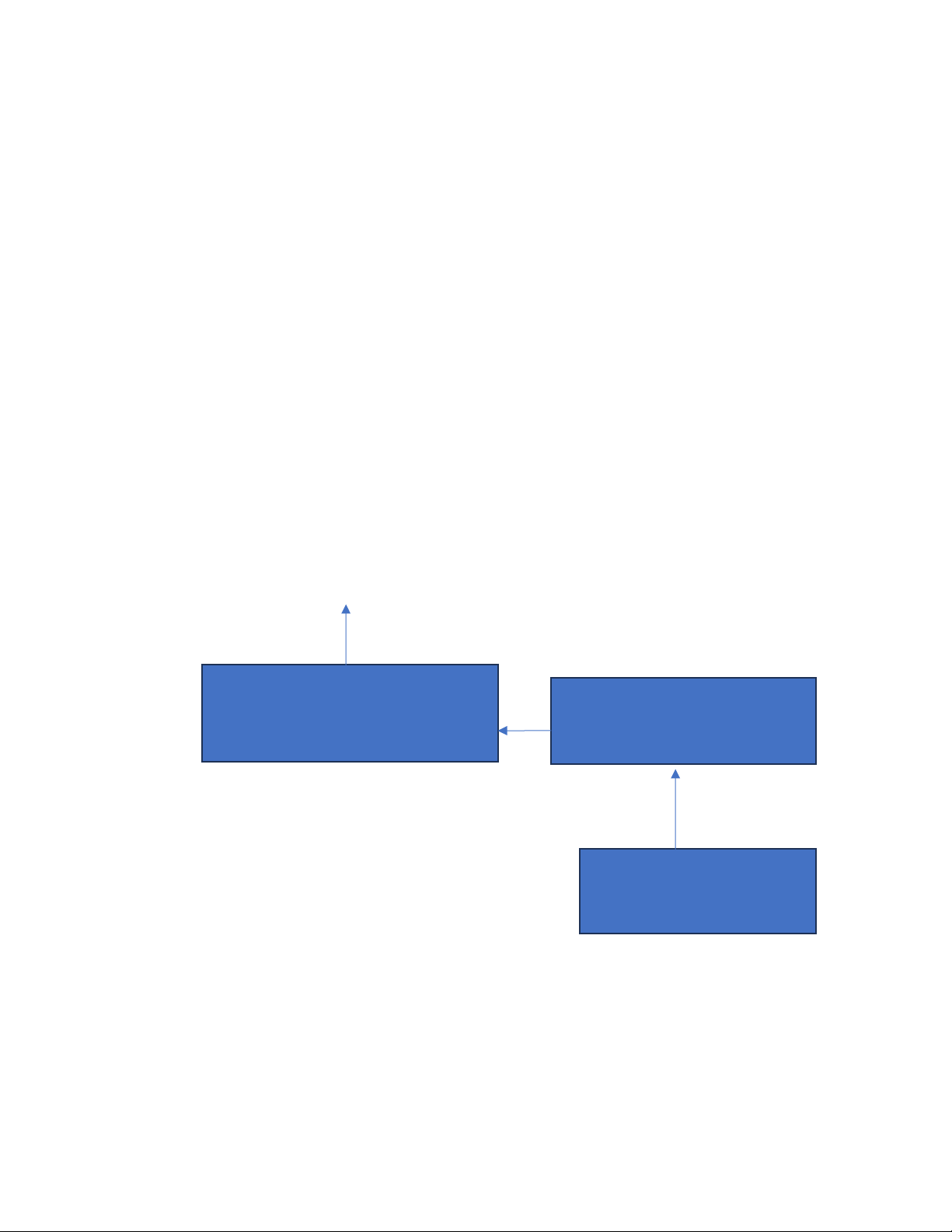
II. Sơ đồ khối của mạch Arduino uno HX711 Loadcell
III. Giới thiệu về loadcell
1. Thành phần cấu tạo của loadcell
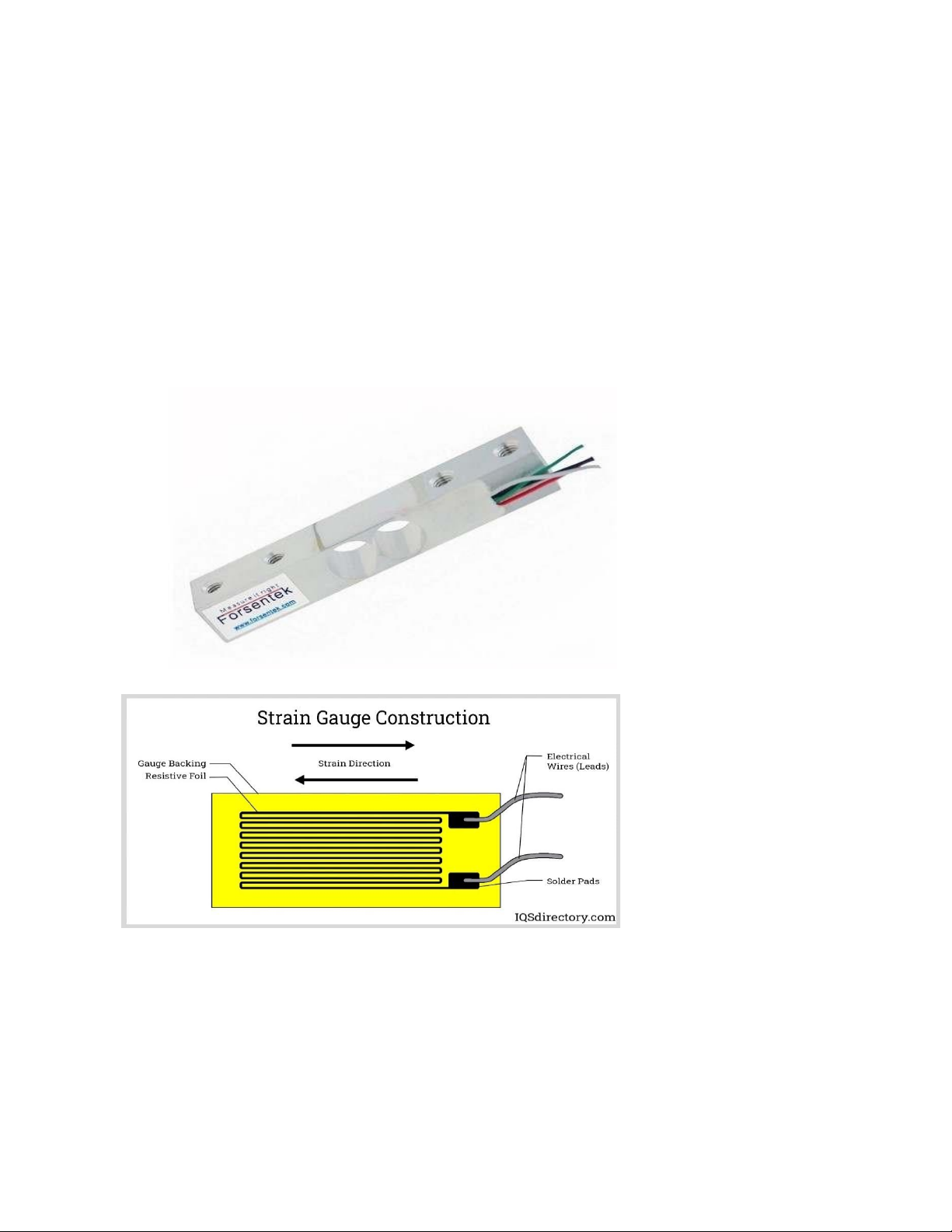
- Loadcell được cấu tạo bởi hai thành phần là: Strain gage và
Load. Một loadcell thường bao gồm các strain gage được dán
vào bề mặt của thân loadcell. Thân loadcell là một khối kim loại
đàn hồi và tùy theo từng loại loadcell và mục đích sử dụng
loadcell, thân loadcell được thiết kế nhiều hình dạng khác nhau,
chế tạo bằng nhiều vật liệu khác nhau (nhôm hợp kim, thép không gỉ…) •
Strain gage là một điện trở đặc biệt, có điện trở thay đổi
khi bị nén hay kéo dãn và được nuôi bằng một nguồn ổn định. •
Load là một thanh kim loại có tính đàn hồi.
Hình 1: hình ảnh về loadcell Hình 2 : Strain Gauge
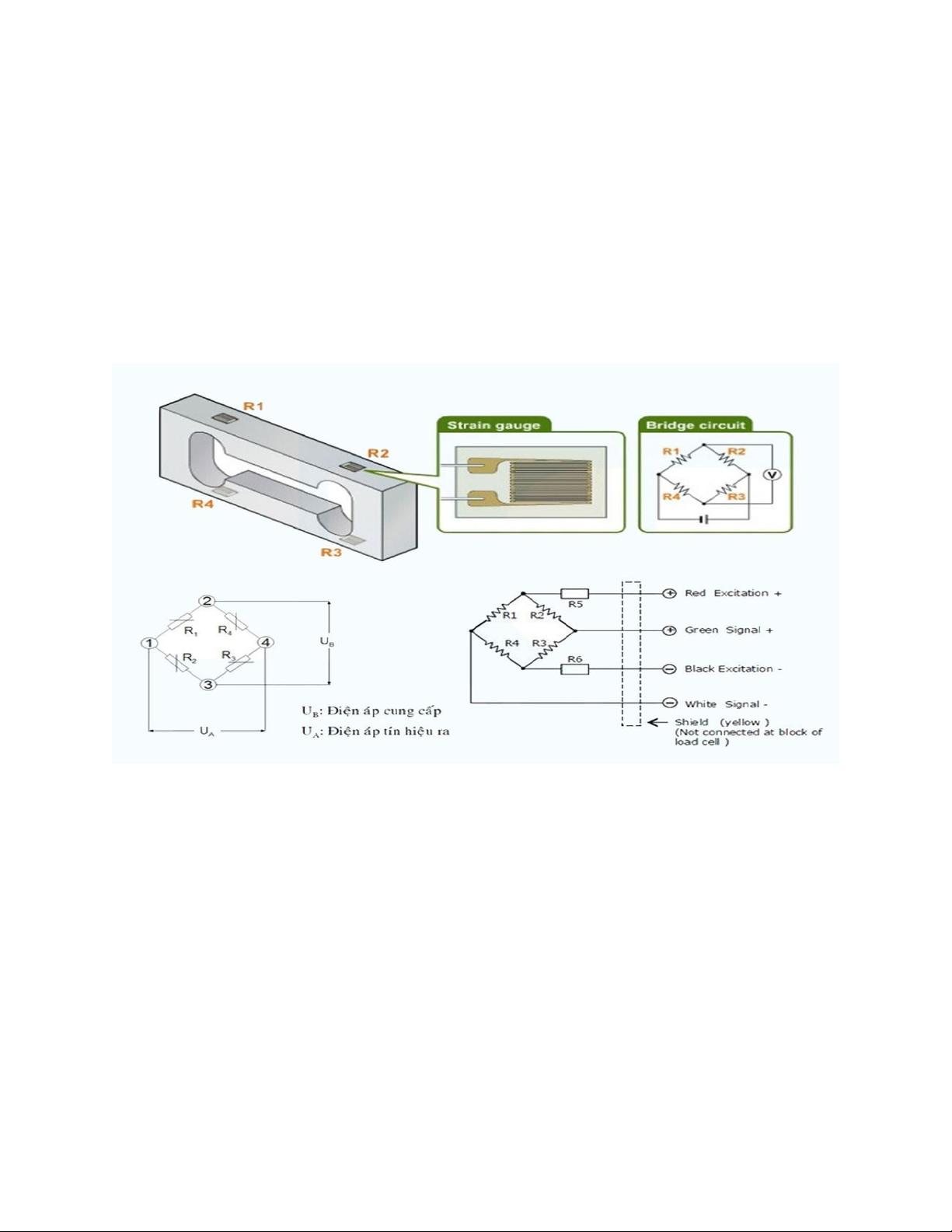
2. Nguyên lý hoạt động
- Một điện áp được cung cấp cho ngõ vào loadcell (2 góc (1) và
(4) của cầu điện trở Wheatstone) và điện áp tín hiệu ra được đo giữa hai góc khác.
Tại trạng thái cân bằng (trạng thái không tải), điện áp tín hiệu ra
là số không hoặc gần bằng không khi bốn điện trở được gắn phù
hợp về giá trị. Khi có tải trọng hoặc lực tác động lên thân
loadcell làm cho thân loadcell bị biến dạng (giãn hoặc nén), dẫn
đến sự thay đổi về chiều dài và tiết diện của các sợi kim loại của
điện trở strain gage -> thay đổi giá trị điện trở -> thay đổi điện áp đầu ra. Hình 3
Lưu ý: Hành động như đặt đột ngột hay thảy vật cân có
khối lượng cân nặng lên bàn cân rất dễ làm cho thanh kim
loại bị biến dạng đột ngột làm cân sẽ không chính xác và
mau hỏng Strain Gauge. Không nên cân một vật có khối
lượng lớn vượt qua khỏi thang đo của cân.
3. Các thông số của loadcell
• Độ chính xác: Đây sẽ cho biết phần trăm chính xác
trong phép đo. Và độ chính xác phụ thuộc và tính chất
phi tuyến tính, độ trễ, độ lặp
• Công suất định mức: Chính là giá trị khối lượng lớn
nhất mà loadcell có thể đo được
• Dải bù nhiệt độ: Đây là khoảng nhiệt độ mà đầu ra
loadcell bù vào, nếu nằm ngoài khoảng này thì đầu ra
sẽ không được đảm bảo thực hiện đúng chi tiết kỹ thuật đưa ra.
• Cấp bảo vệ: Sẽ được đánh giá theo thang đo IP, ví dụng
như IP65 sẽ chống được độ ẩm và bụi
• Điện áp: Chính là giá trị điện áp làm việc của loadcell (5 - 15V)
• Độ trễ: Trễ sẽ xảy ra khi kết quả hiển thị dẫn tới sai số
trong kết quả. Thường sẽ được đưa ra dưới dạng % của tải trọng.
• Trở kháng đầu vào: Phần trở kháng này sẽ được xác
định thông qua S-và S+, khi mà loadcell chưa kết nối
được vào hệ thống hoặc là ở chế độ không tải.
• Điện trở cách điện: Thường sẽ đo tại dòng DC 50V. Giá
trị cách điện giữa lớp vỏ kim loại của loadcell và thiết
bị kết nối dòng điện
• Phá huỷ cơ học: Đây là giá trị tải trọng mà loadcell có
thể bị phá vỡ hoặc sẽ bị biến dạng
• Giá trị ra: Là kết quả đo được (đơn vị: mV)
• Trở kháng đầu ra: Dưới dạng trở kháng được đo giữa
Ex+ và Ex- , khi trong điều kiện loadcell chưa kết nối
hoặc ở chế độ không tải
• Quá tải an toàn: Chính là công suất mà loadcell có thể
vượt qua, ví dụ như 125% công suất
• Hệ số tác động của nhiệt độ: Chính là đại lượng được
đo ở chế độ có tải, sẽ là sự thay đổi công suất của
loadcell dưới sự thay đổi nhiệt độ. Ví dụ 0.01%/10 độ
C có nghĩa là nếu nhiệt độ tăng thêm 10 độ C thì công
suất đầy tải của loadcell sẽ tăng thêm 0.01%)
• Hệ số tác động của nhiệt độ tại điểm 0: Cũng sẽ tương
tự như trên nhưng sẽ đo ở chế độ không tải.
IV. Giới thiệu về HX711
1. Tổng quát về IC HX711
• HX711 là IC chuyển đổi tín hiệu tương tự (Analog)
sang digital (ADC) 24-bit. Được tích hợp trong một bộ
tiền khuếch đại (Preamplifier) được sử dụng để khuếch
đại tín hiệu điện áp thấp. Chip HX711 lấy tín hiệu điện
áp đầu vào và xuất ra các giá trị digital.
• Có bộ điều chỉnh nguồn điện trên chip cung cấp nguồn
điện analog do đó bạn không cần bộ điều chỉnh nguồn
bên ngoài. Bạn có thể giao tiếp trực tiếp với một cảm biến bridge.
• Chip có hai kênh analog là A và B. Chúng ta có thể sử
dụng kênh A có độ lợi 128db hoặc 64db và kênh B có
độ lợi không đổi là 32db.
2. Chức năng bộ tiền khuếch đại (Preamplifier)
Con chip này chủ yếu thích hợp cho các ứng dụng đo trọng
lượng. Các cảm biến lực được sử dụng cho điện áp đầu ra rất
thấp. Điện áp đầu ra thường có đơn vị mV. IC ADC thông
thường như ADC0804 không thể đo điện áp thấp như vậy
với độ phân giải hoặc độ chính xác tốt. HX711 ADC có thể
đo các điện áp có thang đo giá trị thấp và chuyển đổi thành
các tín hiệu digital. Bởi vì nó có bộ tiền khuếch đại bên trong
chip rất phù hợp cho các ứng dụng liên quan.
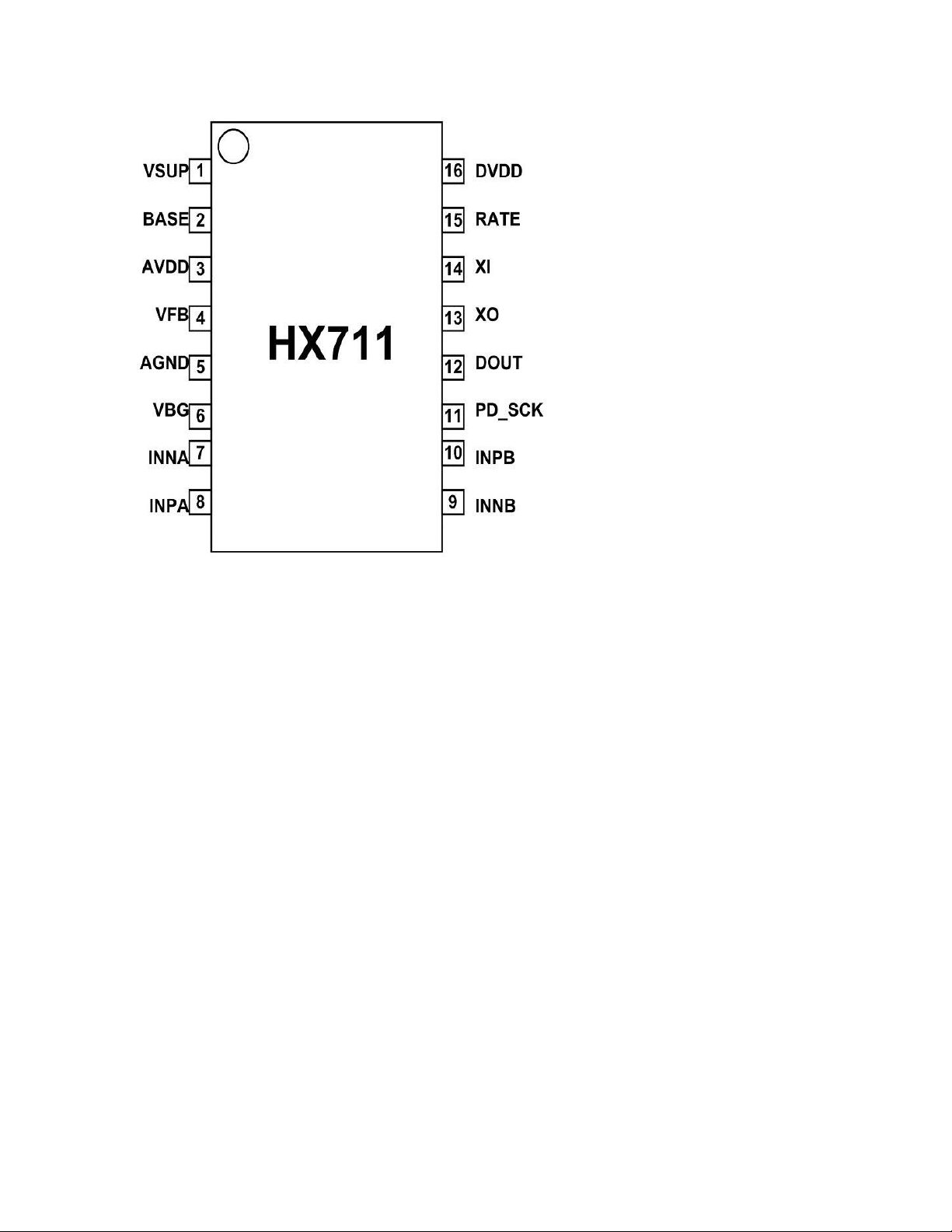
3. Sơ đồ chân của HX711
Chân 1: VSUP Là chân cấp nguồn được điều chỉnh trong
phạm vi từ 2.7V đến 5,5 V.
Chân 2: BASE Là đầu ra điều khiển bộ điều chỉnh.
Chân 3: AVDD Nguồn điện analog được cấp ở chân này và
giá trị phải nằm trong khoảng từ 2.6V đến 5.5V.
Chân 4: VFB Là đầu vào điều khiển tương tự analog của bộ
điều chỉnh được kết nối với mass tín hiệu analog khi không được sử dụng.
Chân 5: AGND Chân mass analog
Chân 6: VBG Đầu ra bypass giá trị tham chiếu analog
Chân 7: INA- Đầu vào analog âm kênh A
Chân 8: INA + Đầu vào analog dương kênh A
Chân 9: INB- Đầu vào analog âm kênh B
Chân 10: INB + Đầu vào analog dương kênh B
Chân 11: PD_SCK Đầu vào xung nhịp truyền dữ liệu nối tiếp digital
Chân 12: DOUT Đầu ra dữ liệu digital nối tiếp
Chân 13: XO I / O xung nhịp thạch anh
Chân 14: XI I / O xung nhịp thạch anh hoặc đầu vào xung nhịp bên ngoài
Chân 15: RATE Chân đầu vào digital kiểm soát tốc độ
truyền dữ liệu ở đầu ra. Khi ở mức logic thấp, tốc độ dữ liệu
là 10Hz. Khi ở mức logic cao, tốc độ dữ liệu là 80Hz.
Chân 16: DVDD Là bộ nguồn digital có giá trị nằm trong
khoảng từ 2.6V đến 5.5V.
Hình 4 : Sơ đồ chân của HX711
4. Cách sử dụng ADC
Có hai kênh đầu vào vi sai A và B có thể lựa chọn bằng bộ
ghép kênh đầu vào và cấp đầu vào kênh đó cho bộ PGA. Kích hoạt chip
• Để kích hoạt bộ dao động trên chip, hãy kết nối chân14
với mass. Tốc độ dữ liệu đầu ra là 10SPS hoặc 80SPS.
Sử dụng thạch anh tạo tần số ở các chân XI và XO để
có được tốc độ dữ liệu chính xác ở đầu ra.
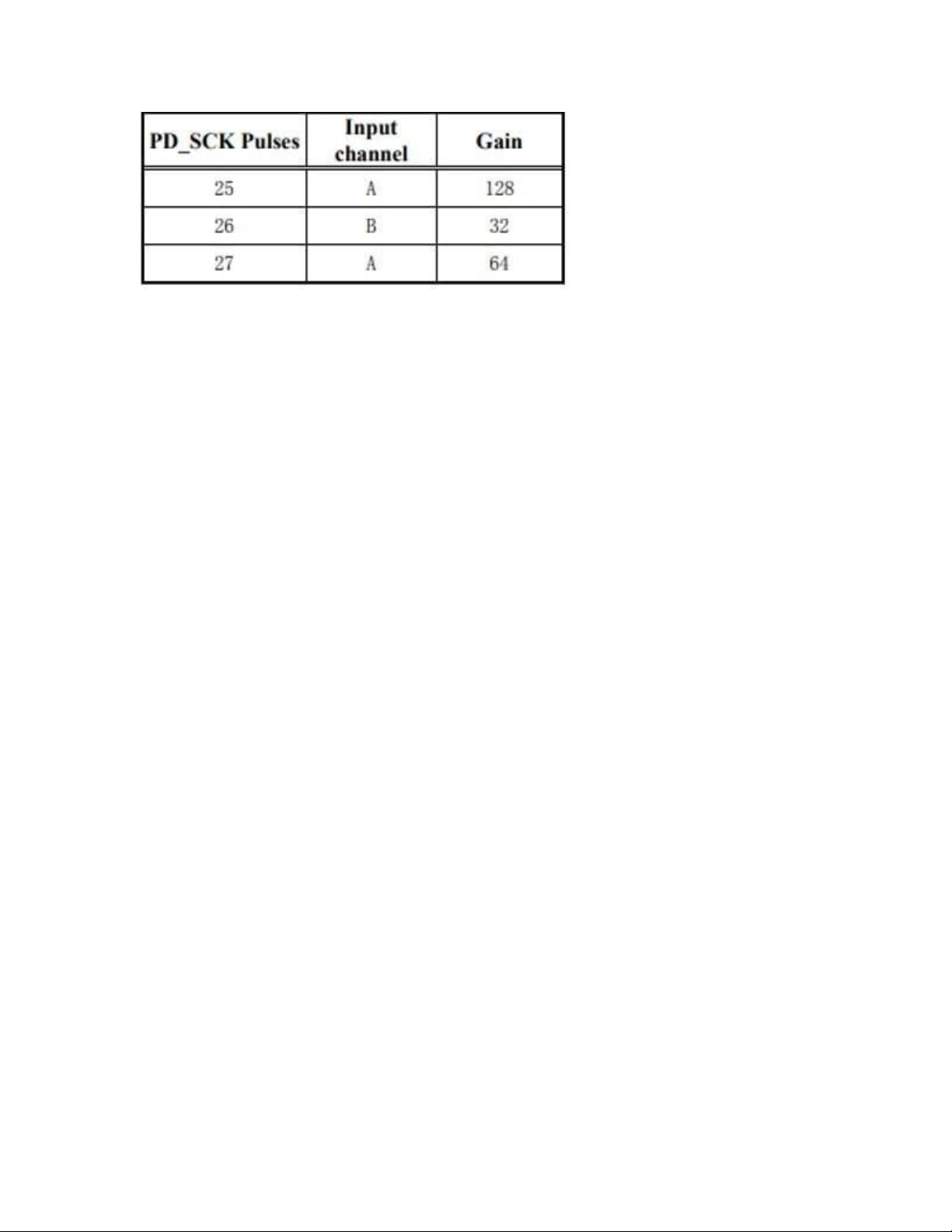
• Chân 11 và chân 12 dùng để lấy dữ liệu. Chân 12
lênmức logic cao, khi dữ liệu chưa sẵn sàng để truy
xuất. Tại thời điểm đó, đầu vào chân 11 sẽ ở mức logic
thấp. Khi chân 12 ở mức logic thấp, có nghĩa là dữ liệu
đã sẵn sàng để được truy xuất. Dữ liệu đi ra từ chân 12
khi kích số lượng tín hiệu xung nhịp 25 đến 27.
Hình 5: Bảng chỉ rõ xung nhịp ở 2 kênh A và B
5. Xung nhịp clock và đầu vào điều khiển
• Số lượng xung nhịp đầu vào điều khiển đầu vào và chọn
độ lợi. Không được nhỏ hơn 25 hoặc lớn hơn 27. Nếu
không, nó sẽ có lỗi giao tiếp truyền dữ liệu nối tiếp.
• Có khả năng reset khi bật nguồn, sẽ thiết lập lại vi mạch khi cấp nguồn cho chip.
• Ở điều khiện hoạt động bình thường, đầu vào xung nhịp
chân 11 ở mức logic thấp.
• Khi có cạnh xung tích cực được kích ở chân 11 và vẫn
giữ ở mức logic đó lâu hơn 60µs, IC sẽ chuyển sang chế độ power-down. 6. Reset
• Chip sẽ reset và trở lại chế độ hoạt động bình thường khi
chân 11 trở về mức logic thấp. Sau đó, kênh đầu vào sẽ
được đặt về kênh A theo mặc định.
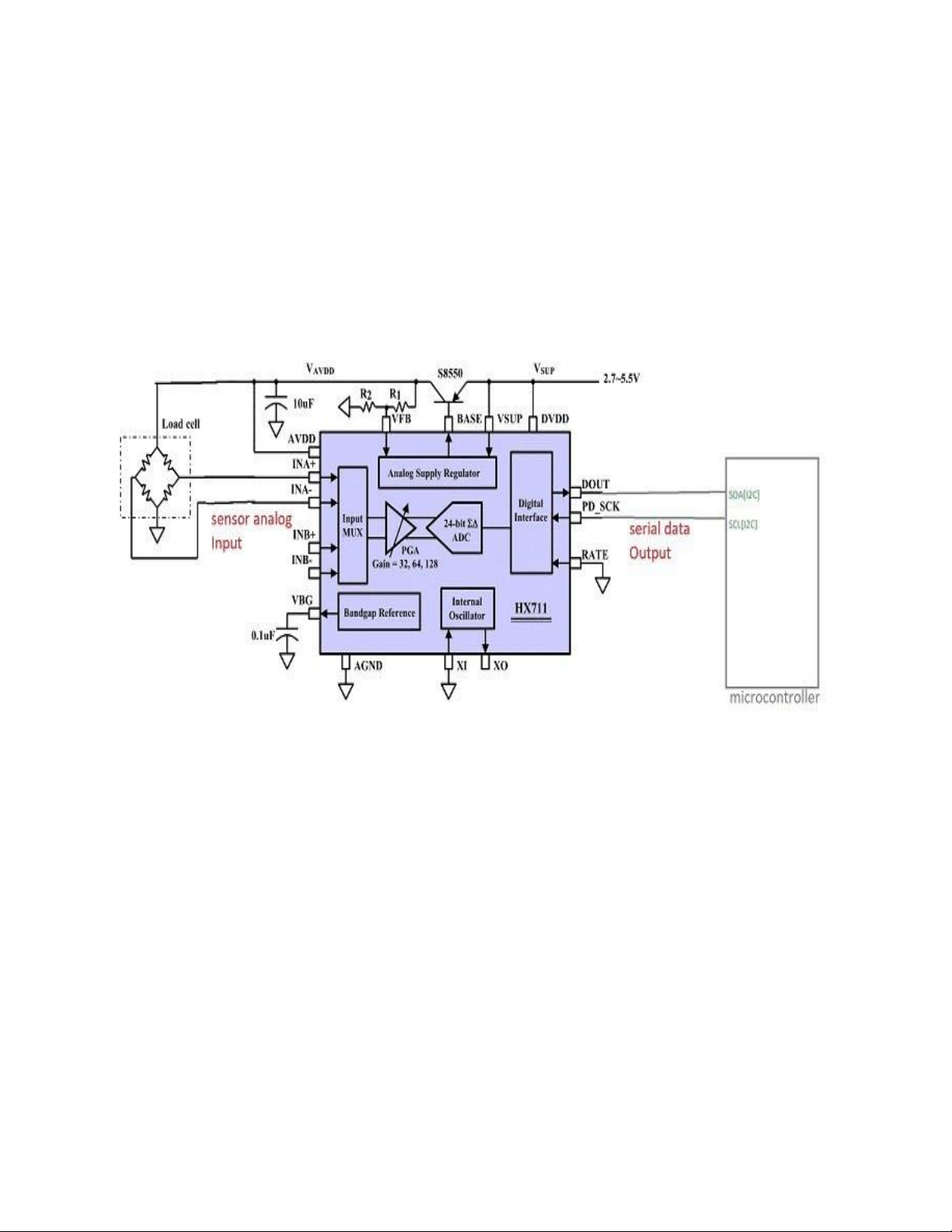
7. Nguyên lý làm việc của mạch .
• Khi đặt cân lên cảm biến lực, nó tạo ra điện áp analogở
các chân đầu ra phụ thuộc vào trọng lượng của tải.
• Kênh A đọc đầu ra cảm biến thông qua bộ khuếch đạivà bộ ghép kênh đầu vào.
• Bộ khuếch đại điều chỉnh độ lớn tín hiệu đầu vào
vàchuyển tín hiệu này đến mạch chuyển đổi tín hiệu digital.
• Mạch giao tiếp digital chuyển tín hiệu đầu vào
analogsang tín hiệu digital 24 bit và gửi tín hiệu ra chân đầu ra DOUT.
Sau đó, chúng ta có thể sử dụng bất kỳ vi điều khiển nào có
chân GPIO để đọc dữ liệu từ chân DOUT.
• Chúng ta có thể dễ dàng đọc dữ liệu từ cổng I2C
bằngbất kỳ bộ vi điều khiển nào.
Hình 6: Sơ đồ của 1 mạch làm việc dùng HX711
8. Thông số kỹ thuật
• Điện áp hoạt động : 2.7 - 5V
• Dòng tiêu thụ : < 1.5 mA
• Tốc độ lấy mẫu : 10 - 80 SPS ( tùy chỉnh )
• Độ phân giải : 24 bit ADC
• Độ phân giải điện áp : 40mV
• Kích thước : 38 x 21 x 10 mm
V. Giới thiệu về Arduino UNO R3 1. Tổng quan
Arduino Uno là bo mạch vi xử lý hoạt động dựa trên
ATmega328. Bo mạch này có 14 chân input/output digital
(trong đó có 6 chân được dùng cho điều chế xung đầu ra
PWM), 6 đầu vào analog, tần số giao động thạch anh là
16MHz, kết nối USB, jack cắm nguồn, chân tiêu đề ICSP,
một nút reset. Bo mạch này chứa tất cả các tính năng cần
thiết để hỗ trợ kết nối với các vi điều khiển khác. Nguồn sử
dụng cho bo mạch có thể qua USB, sử dụng pin hoặc nguồn
thông qua bộ chuyển đổi AC–DC.
Hình 7 : Hình ảnh về arduino uno
Arduino Uno khác với tất cả các bo mạch khác ở chỗ nó không
sử dụng chip điều khiển nối tiếp FTDI USB. Thay vào đó các
tính năng của ATmega16U2 được lập trình để chuyển đổi USB nối tiếp. 2.Bộ nhớ Vi điều khiển ATmega328: •
32 KB bộ nhớ Plash: trong đó bootloader chiếm 0.5KB. •
2 KB cho SRAM: (Static Random Access Menory):
giá trị các biến khai báo sẽ được lưu ở đây. Khai báo
càng nhiều biến thì càng tốn nhiều bộ nhớ RAM. Khi
mất nguồn dữ liệu trên SRAM sẽ bị mất. •
1 KB cho EEPROM: (Electrically Eraseble
Programmable Read Only Memory): Là nơi có thể
đọc và ghi dữ liệu vào đây và không bị mất dữ liệu khi mất nguồn.
3.Đặc tính của Arduino UNO R3 Vi điều khiển ATmega328 họ 8bit
5V DC (chỉ được cấp qua cổng Điện áp hoạt động USB) Tần số hoạt động 16 MHz Dòng tiêu thụ khoảng 30mA Điện áp vào khuyên 7-12V DC dùng Điện áp vào giới hạn 6-20V DC Số chân Digital I/O 14 (6 chân hardware PWM) Số chân Analog 6 (độ phân giải 10bit) Dòng tối đa trên mỗi 30 mA chân I/O Dòng ra tối đa (5V) 500 mA Dòng ra tối đa (3.3V) 50 mA 32 KB (ATmega328) với 0.5KB Bộ nhớ flash dùng bởi bootloader SRAM 2 KB (ATmega328)
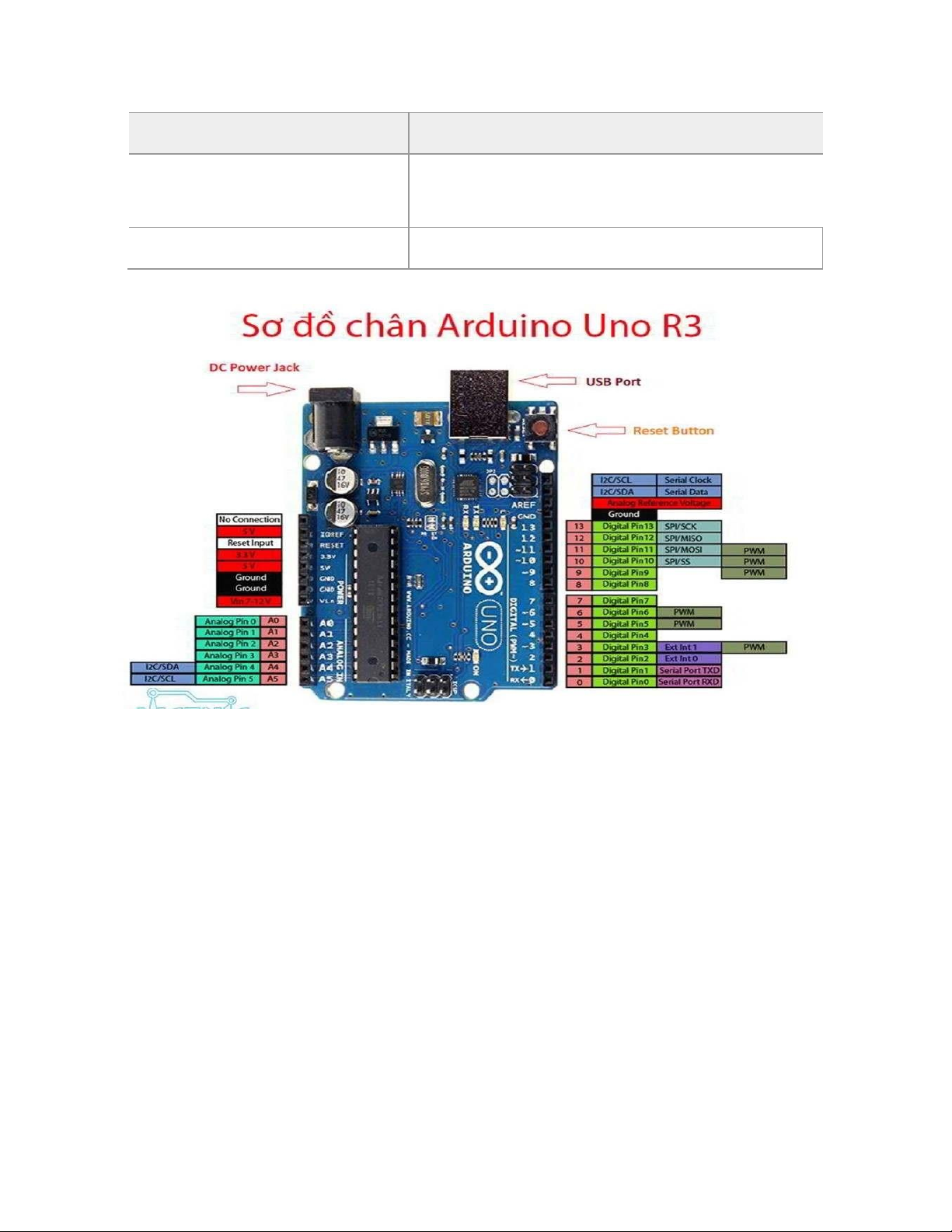
4.Sơ đồ chân của Arduino Uno R3 Hình 8
Trên Board Arduino Uno R3 có 14 chân Digital được sử
dụng để làm chân đầu vào và đầu ra và chúng sử dụng các hàm
pinMode(), digitalWrite(), digitalRead(). Giá trị điện áp trên mỗi
chân là 5V, dòng trên mỗi chân là 20mA và bên trong có điện
trở kéo lên là 20-50 ohm. Dòng tối đa trên mỗi chân I/O không
vượt quá 40mA để tránh trường hợp gây hỏng board mạch.
Ngoài ra, một số chân Digital có chức năng đặt biệt: •
Serial: 0 (RX) và 1 (TX): Được sử dụng để nhận dữ
liệu (RX) và truyền dữ liệu (TX) TTL. •
Ngắt ngoài: Chân 2 và 3. •
PWM: 3, 5, 6, 9 và 11 Cung cấp đầu ra xung PWM
với độ phân giải 8 bit bằng hàm analogWrite (). •
SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). Các
chân này hỗ trợ giao tiếp SPI bằng thư viện SPI. •
LED: Có 1 LED được tích hợp trên bảng mạch và
được nối vào chân D13. Khi chân có giá trị mức cao
(HIGH) thì LED sẽ sáng và LED tắt khi ở mức thấp (LOW). •
TWI/I2C: A4 (SDA) và A5 (SCL) hỗ trợ giao tiếp
I2C/TWI với các thiết bị khác.
Arduino Uno R3 có 6 chân Analog từ A0 đến A5, đầu vào cung
cấp độ phân giải là 10 bit.
VI. Giới thiệu về LCD 1602
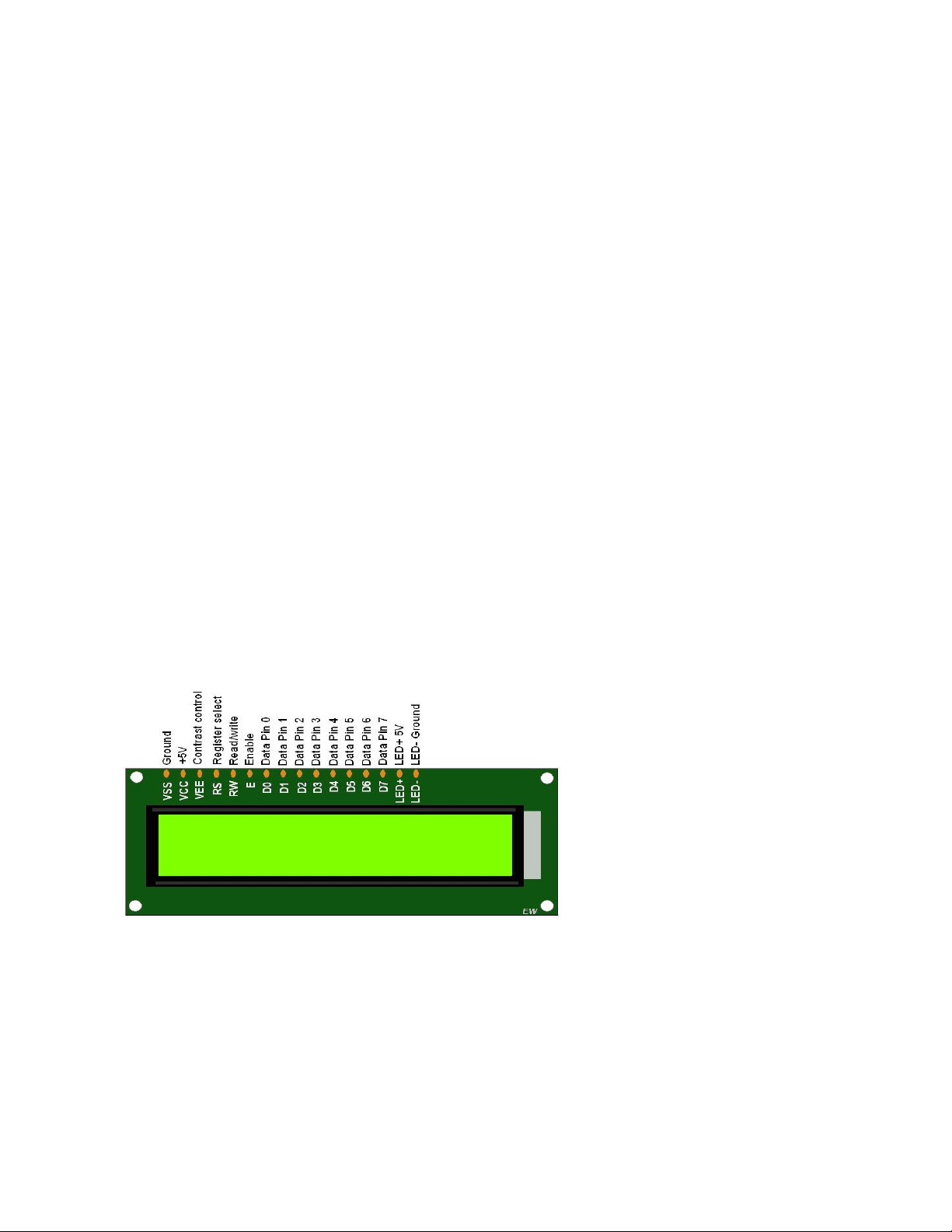
1. Sơ đồ chân của LCD 1602
- Chân số 1 - VSS : chân nối đất cho LCD được nối
vớiGND của mạch điều khiển
- Chân số 2 - VDD : chân cấp nguồn cho LCD, được
nốivới VCC=5V của mạch điều khiển
- Chân số 3 - VE : điều chỉnh độ tương phản của LCD-
Chân số 4 - RS : chân chọn thanh ghi, được nối với logic "0" hoặc logic "1":
+ Logic “0”: Bus DB0 - DB7 sẽ nối với thanh ghi lệnh IR
của LCD (ở chế độ “ghi” - write) hoặc nối với bộ đếm địa
chỉ của LCD (ở chế độ “đọc” - read)
+ Logic “1”: Bus DB0 - DB7 sẽ nối với thanh ghi dữ liệu DR bên trong LCD
- Chân số 5 - R/W : chân chọn chế độ đọc/ghi
(Read/Write), được nối với logic “0” để ghi hoặc nối với logic “1” đọc
- Chân số 6 - E : chân cho phép (Enable). Sau khi các
tínhiệu được đặt lên bus DB0-DB7, các lệnh chỉ được chấp
nhận khi có 1 xung cho phép của chân này như sau:
+ Ở chế độ ghi: Dữ liệu ở bus sẽ được LCD chuyển vào
thanh ghi bên trong khi phát hiện một xung (high-to-low
transition) của tín hiệu chân E
+ Ở chế độ đọc: Dữ liệu sẽ được LCD xuất ra DB0-DB7
khi phát hiện cạnh lên (low-to-high transition) ở chân E và
được LCD giữ ở bus đến khi nào chân E xuống mức thấp
- Chân số 7 đến 14 - D0 đến D7: 8 đường của bus dữ
liệudùng để trao đổi thông tin với MCU. Có 2 chế độ sử dụng
8 đường bus này là: Chế độ 8 bit (dữ liệu được truyền trên
cả 8 đường, với bit MSB là bit DB7) và Chế độ 4 bit (dữ liệu
được truyền trên 4 đường từ DB4 tới DB7, bit MSB là DB7)
- Chân số 15 - A : nguồn dương cho đèn nền
- Chân số 16 - K : nguồn âm cho đèn nền
Hình 12 : Sơ đồ chân của LCD 1602
2. Thông số kỹ thuật - Điện áp MAX : 7V - Điện áp MIN : - 0,3V
- Hoạt động ổn định : 2.7-5.5V
- Điện áp ra mức cao : > 2.4
- Điện áp ra mức thấp : <0.4V
- Dòng điện cấp nguồn : 350uA - 600uA
- Nhiệt độ hoạt động : - 30 - 75 độ C 3. Giao tiếp với LCD Khởi tạo LCD
Các bước phải được thực hiện để khởi tạo màn hình LCD
được đưa ra dưới đây và các bước này là phổ biến cho hầu hết các ứng dụng.
- B1: Gửi 38H đến dòng dữ liệu 8 bit để khởi tạo
- B2: Gửi 0FH để bật LCD, con trỏ BẬT và con trỏ nhấpnháy ON.
- B3:Gửi 06H để tăng vị trí con trỏ.
- B4: Gửi 01H để xóa màn hình và trả về con trỏ.
Đưa dữ liệu vào LCD
Các bước để gửi dữ liệu đến mô-đun LCD được đưa ra dưới
đây. Mô-đun LCD có các chân RS, R / W và E. Chính trạng
thái logic của các chân này làm cho mô-đun xác định xem
đầu vào dữ liệu đã cho là lệnh hay dữ liệu được hiển thị. - Đặt R / W mức thấp.
- Đặt RS = 0 nếu byte dữ liệu là lệnh và tạo RS = 1
nếubyte dữ liệu là dữ liệu sẽ được hiển thị.
- Đặt byte dữ liệu trên thanh ghi dữ liệu.
- Xung E từ cao xuống thấp.
- Lặp lại các bước trên để gửi dữ liệu khác.
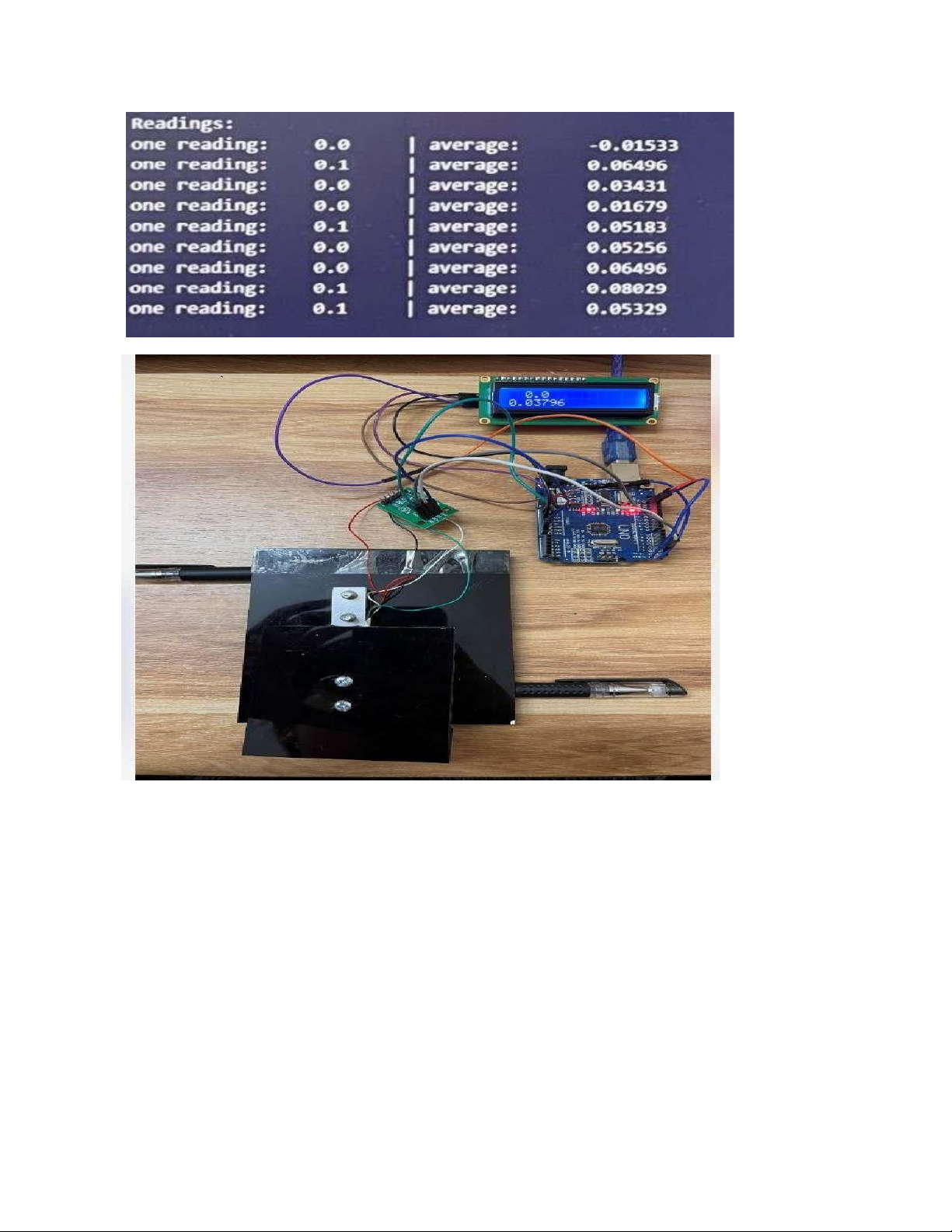
VI.Kết quả đo thực tế +) Khi không có vật :
Qua hình ảnh trên, nhóm em thấy được rằng sai số của phép
đo luôn ở mức dưới 0.1 và kết quả đo khi hiển thị qua màn
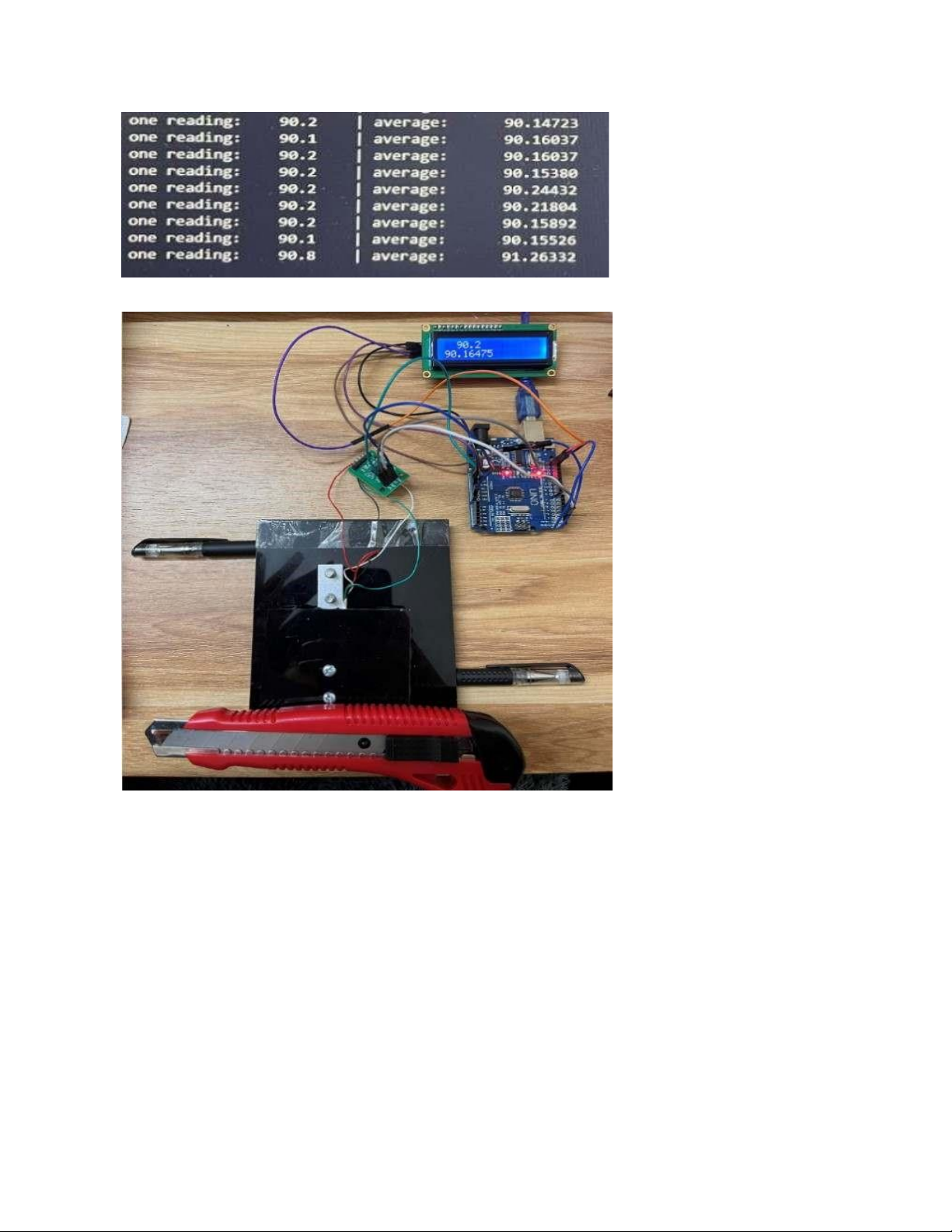
Lcd cũng không quá sai số so với khi hiển thị trên terminal. +) Khi đo vật :
Khi đo vật, cụ thể vật mẫu ở đây là dao dọc giấy. Trước khi
đo, nhóm em đã cân vật mẫu bằng cân tiểu ly và được kết
quả cho khối lượng vật là 90g. So sánh với những kết quả đo
được bằng loadcell thì sai số nằm trung bình ở mức 0.2g .
Khối lượng hiển thị trên màn hình Lcd cũng cho ra kết quả
tương đối chính xác, độ lệch không đáng kể so với output của terminal. VIII. Lời kết
Nhóm bọn em đã hoàn thiện bài tập lớn môn kỹ thuật đo lường
với đề tài Đo trọng lượng bằng cảm biến điện trở lực căng
(loadcell). Kết quả đo ngoài thực tế tương đối chính xác. Tuy còn
có những sai sót nhưng mong cô chỉ dẫn thêm.
Ngoài cung cấp những kiến thức cơ bản về môn học, một điều
quan trọng không thể không nói đến khi làm bài tập lớn là đã tạo
cho chúng em những kỹ năng mềm của bản thân, khả năng tư duy
độc lập và khả năng làm việc nhóm. Một lần nữa em xin chân
thành cảm ơn cô Nguyễn Thanh Hường đã giúp đỡ chúng em hoàn
thành tốt bài tập lớn này !!!
Tài liệu liên quan:
-

Đề thi cuối kỳ 1 môn Kĩ thuật đo lường điện | Đại học Bách Khoa Hà Nội
36 18 -

Báo cáo thí nghiệm, kĩ thuật đo lường ĐH Bách Khoa
34 17 -

Đề thi cuối kỳ Dao động đồ và Litxagiu môn Đo lường điện | Trường Đại học Bách Khoa Hà Nội
91 46 -

Báo cáo thực tập về thiết bị hàn và đo lường điện môn Đo lường điện | Trường Đại học Bách Khoa Hà Nội
105 53 -

Trắc nghiệm Đo lường điện áp và sai số môn Đo lường điện | Trường Đại học Bách Khoa Hà Nội
80 40