Báo cáo thực tập Hệ thống truyền động Servo | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Báo cáo thực tập Hệ thống truyền động Servo của Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh với những kiến thức và thông tin bổ ích giúp sinh viên tham khảo, ôn luyện và phục vụ nhu cầu học tập của mình cụ thể là có định hướng ôn tập, nắm vững kiến thức môn học và làm bài tốt trong những bài kiểm tra, bài tiểu luận, bài tập kết thúc học phần, từ đó học tập tốt và có kết quả cao cũng như có thể vận dụng tốt những kiến thức mình đã học vào thực tiễn cuộc sống. Mời bạn đọc đón xem!
Môn: Mechatronic Servo System Control (SERV334029) 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:


















Preview text:
lOMoARcPSD| 37054152
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT THÀNH PHỐ HỒ
CHÍ MINHKHOA CƠ KHÍ CHẾ TẠO MÁY
BỘ MÔN CƠ ĐIỆN TỬ BÁO CÁO THỰC TẬP
HỆ THỐNG TRUYỀN ĐỘNG SERVO TP.HCM, THÁNG 6 2023 MỤC LỤC
BÀI 1: HỆ THỐNG SERVO MÔT TRỤC SỬ DỤNG ĐỘNG CƠ DC SERVO 1.1.
Cơ sở lý thuyết………………………………………………………3 1.2. Giới thiệu
chung….………………………………………………….3 1.3. Thực
nghiệm…………………………………………………………7 BÀI 2: ĐIỀU
KHIỂN VẬN TỐC CHO ĐỘNG CƠ DC SERVO 2.1. Cơ sở lý
thuyết…………………………………………………………13 2.2. Giới thiệu
chung……………………………………………………….13 2.3. Thực
nghiệm……………………………………………………………17 BÀI 3: HỆ
THỐNG SERVO ĐA TRỤC SỬ DỤNG ĐỘNG CƠ AC SERVO
VÀ MODULE ĐIỀU KHIỂN CHUYỂN ĐỘNG lOMoARcPSD| 37054152
3.1. Cơ sở lý thuyết…………………………………………………………21
3.2. Giới thiệu hệ thống…………………………………………………….21
3.3. Thực nghiệm…………………………………………………………...27
BÀI 4: HỆ THỐNG SERVO THỦY LỰC 4.1. Cơ sở lý
thuyết…………………………................................................41 4.2. Giới thiệu
mô hình thí nghiệm…..........................................................41 4.3. Module mở
rộng PLC FX2N-2AD MITSHUBISHI….......................51 4.4. Module Analog
output module FX2N-4AD….....................................54
4.5. Cấu trúc iều khiển(PID) ….................................................................56
4.6. Thực nghiệm….......................................................................................58 BÀI 1:
ĐIỀU KHIỂN VỊ TRÍ CHO ĐỘNG CƠ DC SERVO 1.1 CƠ SỞ LÝ THUYẾT
o Mô hình thực nghiệm của hệ thống servo một
trục. o Dùng CubeMX Monitor ể mô phỏng hiệu suất hệ thống.
o Lập trình bằng STM32F103 o Điều khiển vị trí của ộng cơ DC servo.
1.2 GIỚI THIỆU CHUNG
1.2.1. Sơ ồ khối và ộng lực học của ộng cơ DC servo
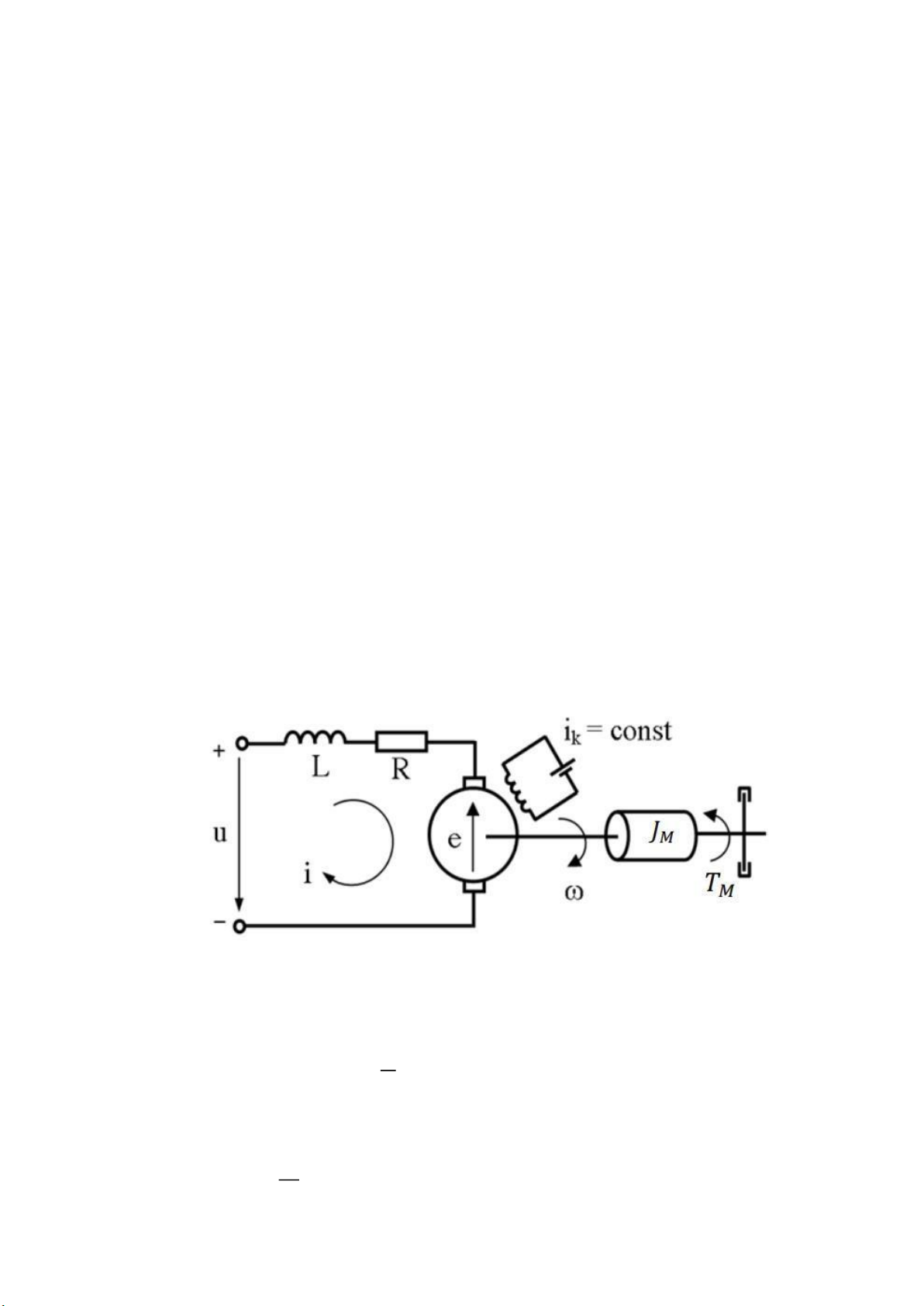
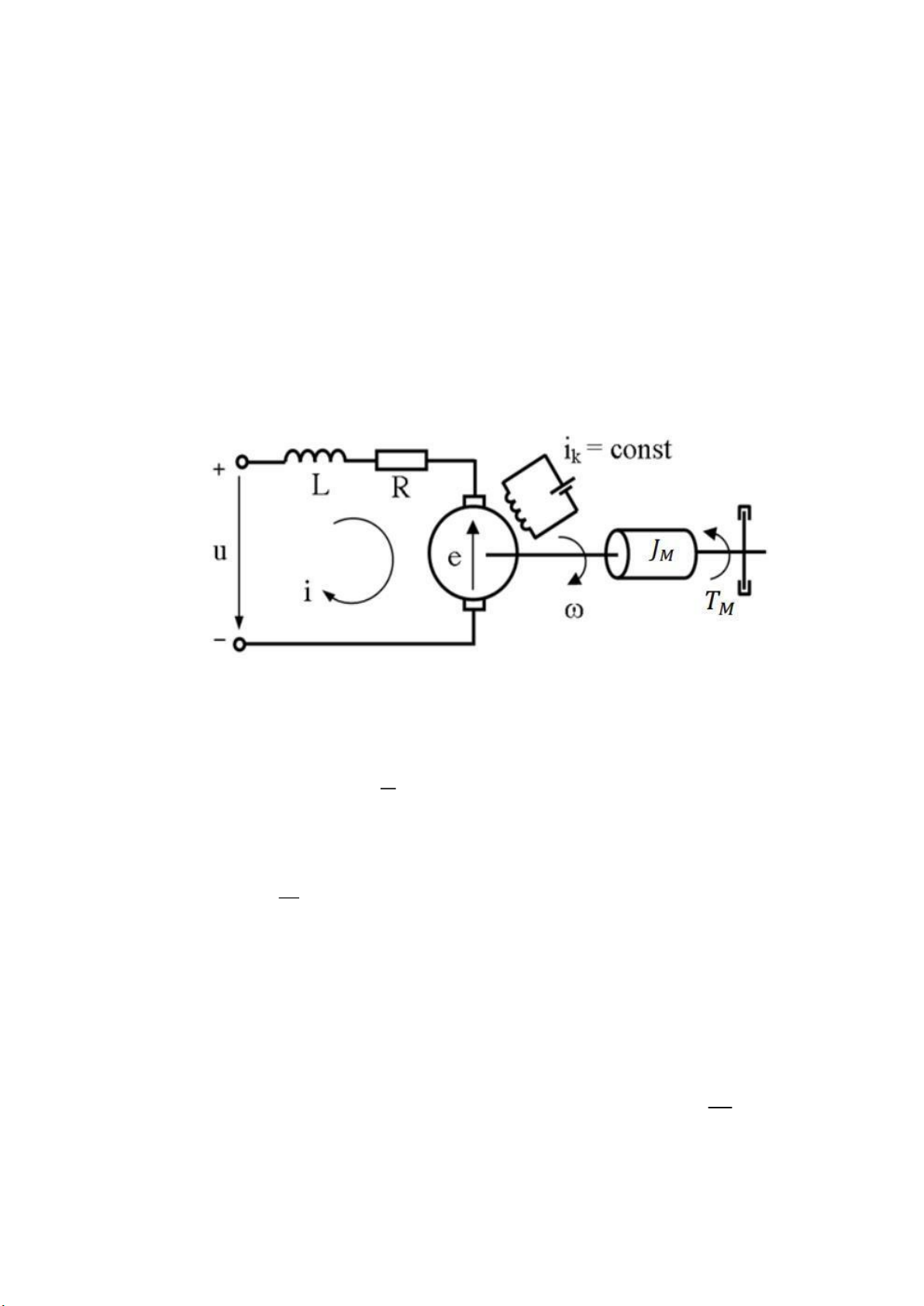
Hình 1.1: Mạch tương ương của ộng cơ DC servo
+ Hệ thống iện: 𝑢(𝑡) = 𝑅𝑖 + 𝐿 𝑑𝑖 + 𝑒 𝑑𝑡 trong ó, 𝑒 = 𝐾𝑒𝜔 + Hệ thống cơ: 𝐽𝑀
𝑑𝜔𝑑𝑡 + 𝑏𝜔 = 𝑇𝑀 lOMoARcPSD| 37054152
trong ó, 𝑇𝑀 = 𝐾𝑚𝑖 + Ta có:
• 𝑢: iện áp vào [𝑉]; 𝜔: vận tốc gốc [𝑟𝑎𝑑 𝑠⁄ ]
• 𝑅: iện trở phần ứng [Ω]; 𝐿: iện cảm phần ứng [𝐻]
• 𝐾𝑒: sức phản iện ộng [𝑉 𝑟𝑎𝑑⁄
/𝑠]; 𝐾𝑚: hệ số mô men xoắn [ 𝑁𝑚𝐴 ]
• 𝐽𝑀: mô men quán tính của trục ộng cơ [𝑘𝑔. 𝑚2]
• 𝑇𝑀: mô men xoắn của ộng cơ [𝑁𝑚]
• 𝑏: hệ số giảm chấn [𝑁𝑚. 𝑠]
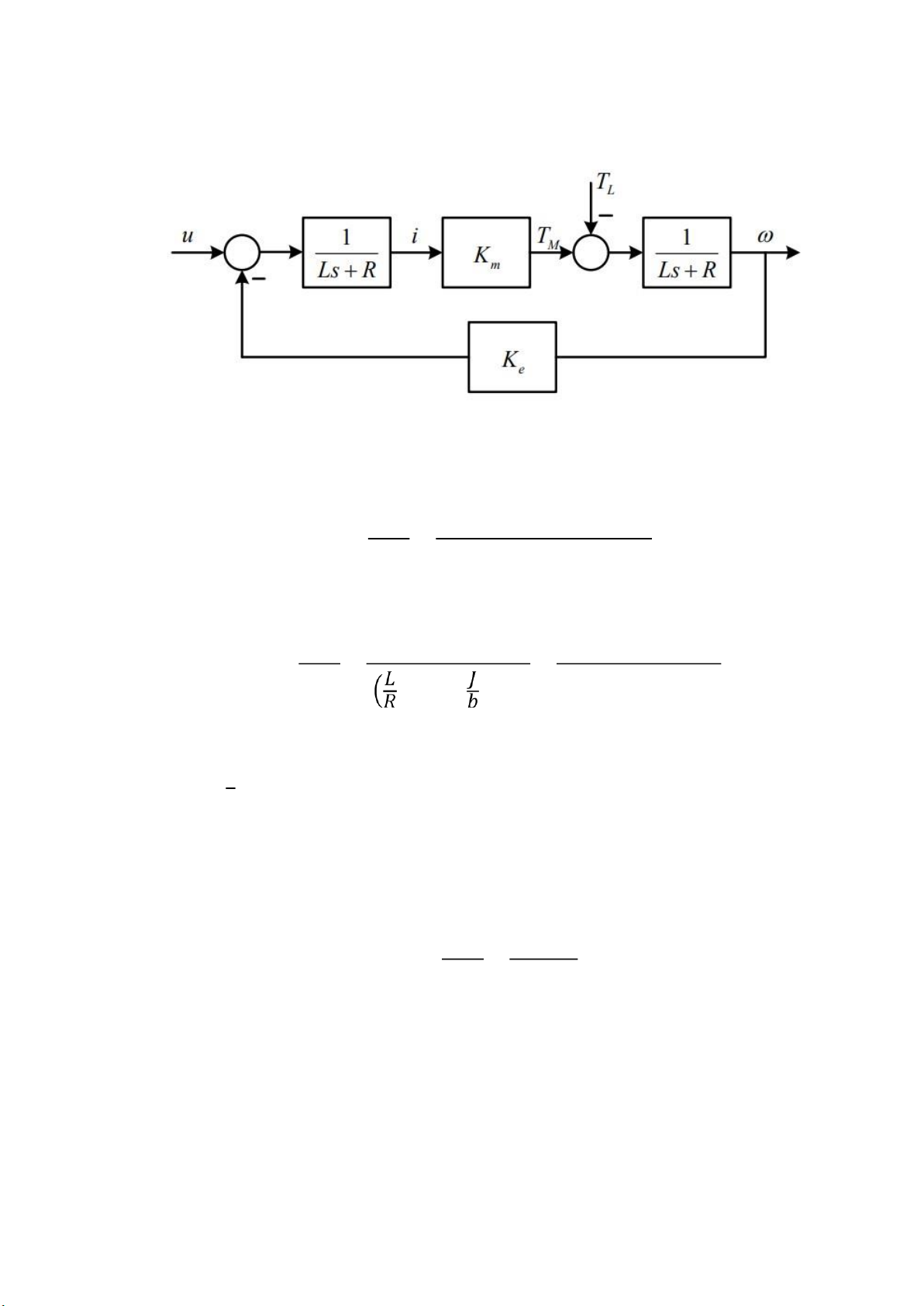
+ Sơ ồ khối của ộng cơ DC servo:
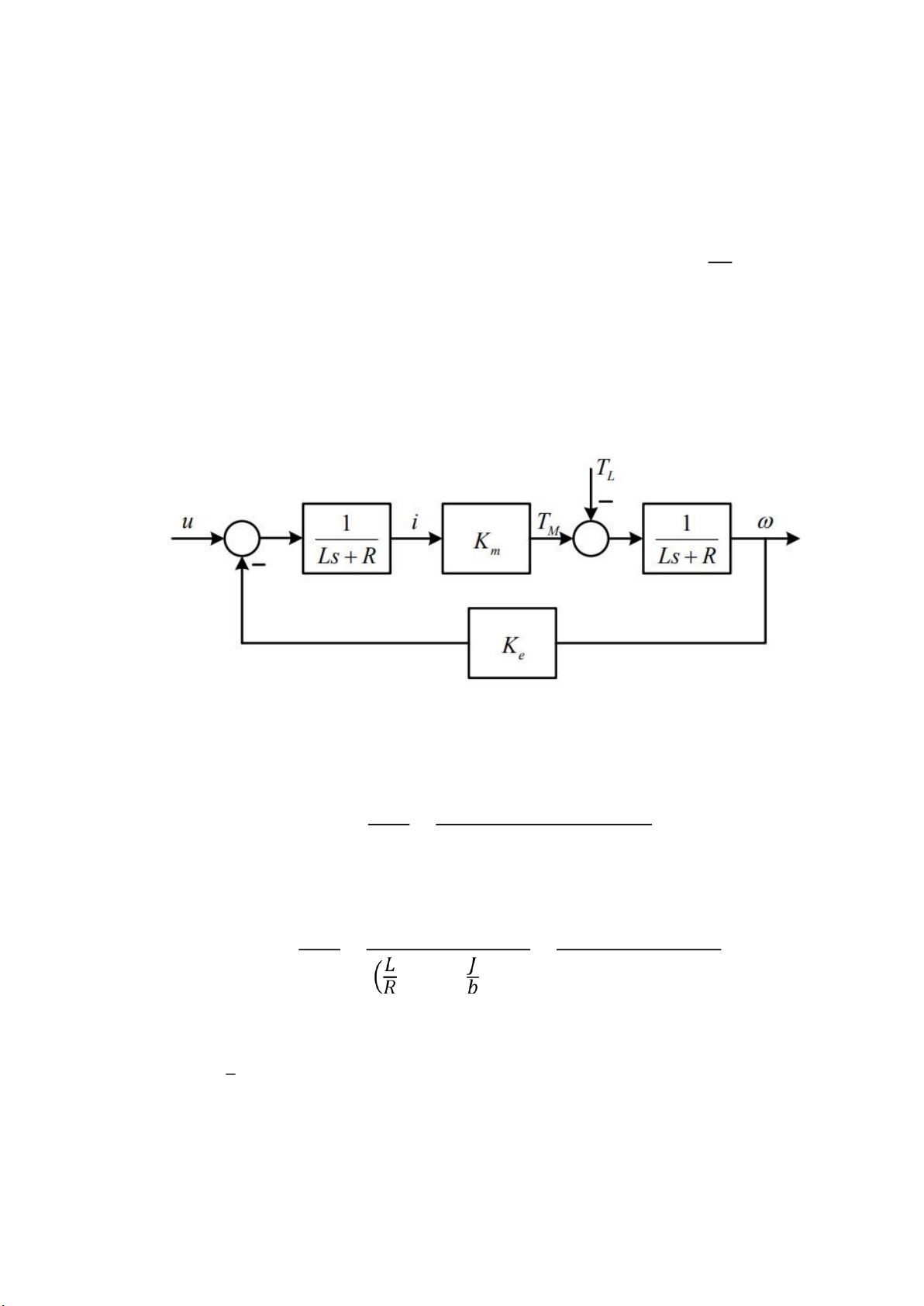
Hình 1.2: Sơ ồ khối của ộng cơ DC servo
+ Hàm truyền của ộng cơ gồm: 𝜔(𝑠) 𝐾𝑚 𝐺(𝑠) = = 𝑈(𝑠)
(𝐿𝑠 + 𝑅)(𝐽𝑠 + 𝑏) + 𝐾𝑚𝐾𝑒 𝜔(𝑠) 𝐾𝑚⁄𝑅𝑏 = 𝐾 𝐺(𝑠) = ≈ 𝑈(𝑠) 𝑠 + 1) ( 𝑠 + 1)
(𝜏𝑒𝑠 + 1)(𝜏𝑚𝑠 + 1) Trong ó,
• 𝜏𝑒 = 𝑅𝐿: hằng số thời gian iện (𝑠)
• 𝜏𝑚 = 𝑏𝐽: hằng số thời gian cơ (𝑠) thông thường, 𝜏𝑚 ≫ 𝜏𝑒
Chúng ta có thể tóm tắt công thức hàm truyền ộng cơ dưới dạng hàm truyền bậc 1: lOMoARcPSD| 37054152 𝜔(𝑠) 𝐾 𝐺(𝑠) = ≈ 𝑈(𝑠) 𝜏𝑚𝑠 + 1
1.2.2. Mô hình thực tế của hệ ộng cơ DC servo một trục
Hình 1.2: Sơ ồ khối của ộng cơ DC servo
+ Bảng ặc tính của ộng cơ DC servo No. Parameters Symbol Units DCM50205 1 Continuous Torque (Max) 𝑇𝐶 𝑁𝑚 0.25 2 Peak Torque (Stall) 𝑇𝑃𝐾 𝑁𝑚 1.59 3 Rated Speed 𝑆𝑅 𝑟𝑝𝑚 3400 4 Rotor Inertia 𝐽𝑀 𝑘𝑔. 𝑚2 3.11 × 10−5 5 Rated Voltage 𝐸 𝑉 24 6 Rated Current 𝐼 𝐴 2.95 7 Torque Constant 𝐾𝑇 𝑁𝑚/𝐴 52 × 10−3 8 Resistance 𝑅𝑇 Ω 0.8 9 Peak Current (Stall) 𝐼𝑃 𝐴 21.6 10 Encoder Resolution - Steps/rev 1000 + Thông số tải trọng:
• Khối lượng: 𝑚 = 0.81774 𝑘𝑔 lOMoARcPSD| 37054152 • Vật liệu: Thép CT3
• Bán kính: 𝑅 = 0.025 𝑚
+ Do ó, mô men quán tính của tải ược tính như sau:
𝐽𝐿 = 𝑚𝑟 = × 0.81774 × 0.0252 = 2.56 × 10−4 [𝑘𝑔. 𝑚2]
1.2.3. Sơ ồ khối tổng quát
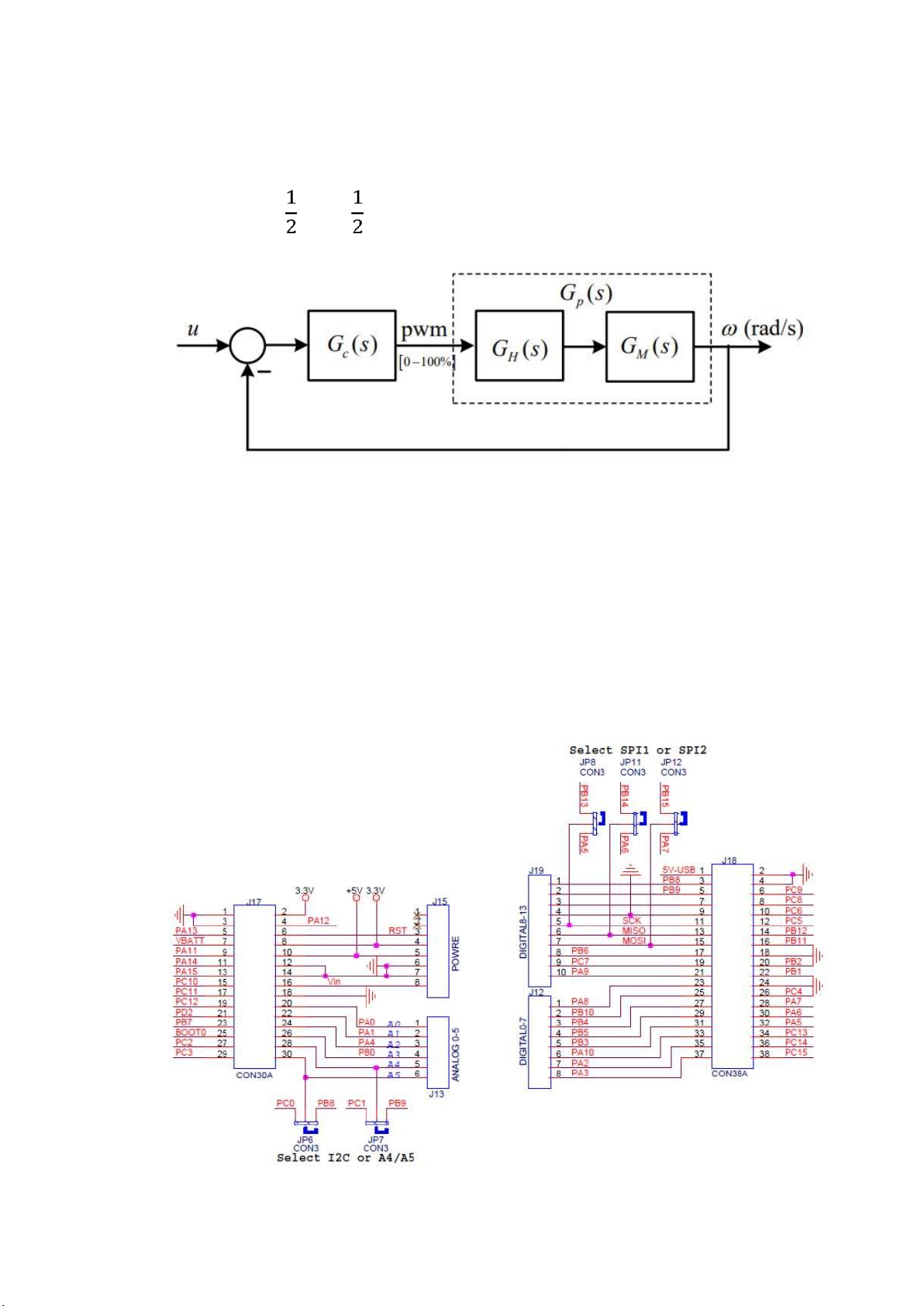
Hình 1.3: Sơ ồ khối tổng quát của bộ iều khiển Trong ó,
• 𝐺𝑐: Bộ iều khiển PID
• 𝐺𝐻: Hàm truyền mạch cầu H
• 𝐺𝑀: Hàm truyền của ộng cơ và tải 1.3 THỰC NGHIỆM
1.3.1. Sơ ồ kết nối phần cứng
Hình 1.4: Sơ ồ chân I/O của board STM32F103 lOMoARcPSD| 37054152
Hình 1.5: Sơ ồ phần cứng và nối dây
Hình 1.6: Sơ ồ chân mạch nạp/debug lOMoARcPSD| 37054152
Hình 1.7: Sơ ồ chân và kết nối của mạch cầu H
1.3.2. Lập trình vi iều khiển
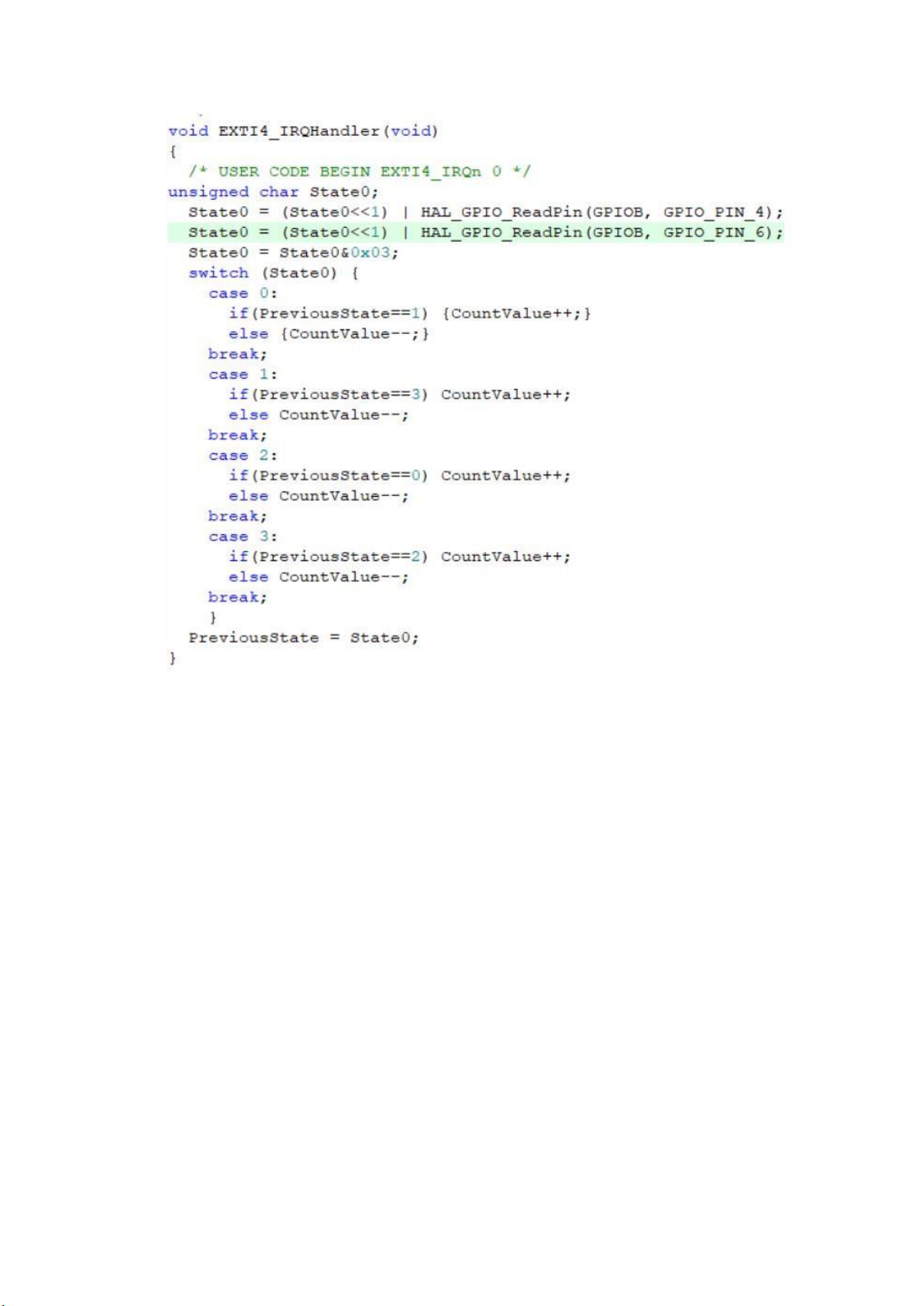
+ Đọc encoder: Dùng 2 ngắt ngoài EXTI4 (PB4) và PB6 (EXTI6).
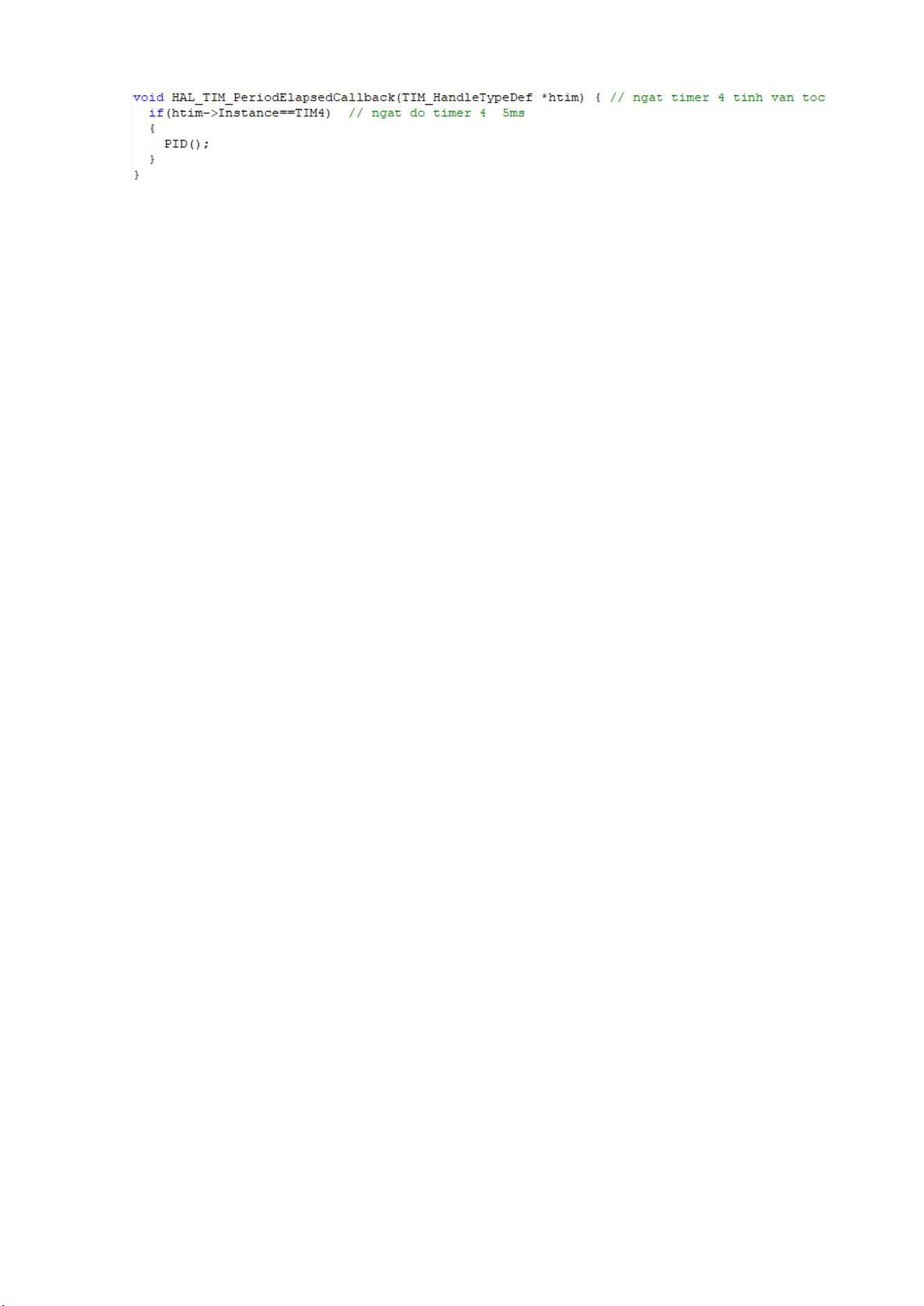
+ Tạo xung PWM: Dùng ngắt timer TIM3_CH2 (PC7). + Ngắt timer: TIM4 lOMoARcPSD| 37054152
+ Chương trình ọc encoder
Hình 1.8: Code mẫu ọc encoder ở kênh A chế ộ 4x
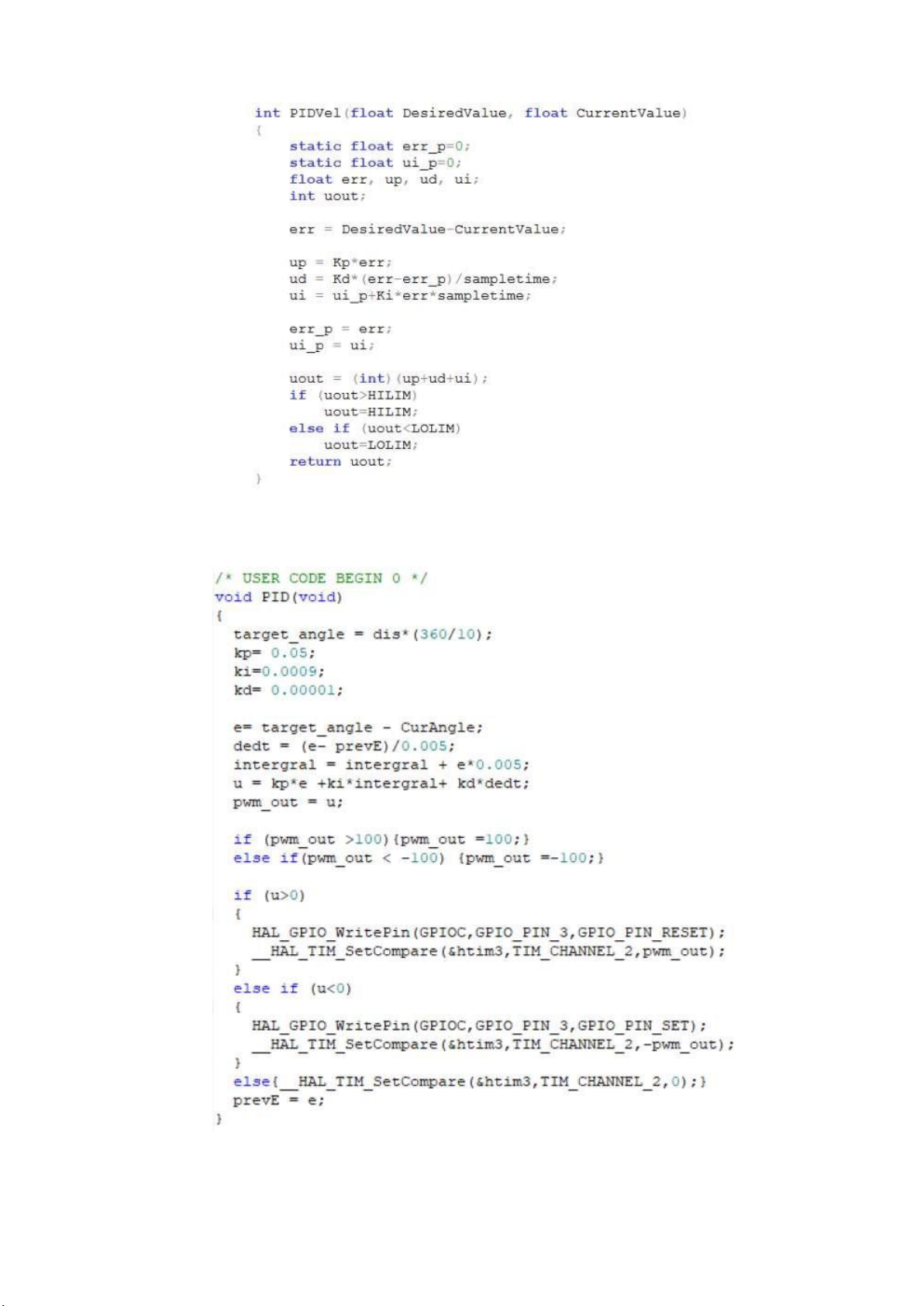
+ Chương trình bộ iều khiển PID số: lOMoARcPSD| 37054152
Hình 1.9: Code mẫu về bộ iều khiển PID số
1.3.3. Tiến hành thí nghiệm
Hình 1.10: Chương trình hàm iều khiển PID lOMoARcPSD| 37054152
Hình 1.11: Hàm ngắt timer ể thực hiện PID lOMoARcPSD| 37054152
BÀI 2: ĐIỀU KHIỂN VẬN TỐC CHO ĐỘNG CƠ DC SERVO 2.1 CƠ SỞ LÝ THUYẾT
o Mô hình thực nghiệm của hệ thống servo một trục.
o Dùng CubeMX Monitor ể mô phỏng hiệu suất hệ thống.
o Lập trình bằng STM32F103 o Điều khiển vận tốc của ộng cơ DC servo.
2.2 GIỚI THIỆU CHUNG
2.2.1. Sơ ồ khối và ộng lực học của ộng cơ DC servo
Hình 2.1: Mạch tương ương của ộng cơ DC servo
+ Hệ thống iện: 𝑢(𝑡) = 𝑅𝑖 + 𝐿 𝑑𝑖 + 𝑒 𝑑𝑡 trong ó, 𝑒 = 𝐾𝑒𝜔 + Hệ thống cơ: 𝐽𝑀
𝑑𝜔𝑑𝑡 + 𝑏𝜔 = 𝑇𝑀
trong ó, 𝑇𝑀 = 𝐾𝑚𝑖 + Ta có:
• 𝑢: iện áp vào [𝑉]; 𝜔: vận tốc gốc [𝑟𝑎𝑑 𝑠⁄ ]
• 𝑅: iện trở phần ứng [Ω]; 𝐿: iện cảm phần ứng [𝐻]
• 𝐾𝑒: sức phản iện ộng [𝑉 𝑟𝑎𝑑⁄
/𝑠]; 𝐾𝑚: hệ số mô men xoắn [ 𝑁𝑚𝐴 ]
• 𝐽𝑀: mô men quán tính của trục ộng cơ [𝑘𝑔. 𝑚2]
• 𝑇𝑀: mô men xoắn của ộng cơ [𝑁𝑚] lOMoARcPSD| 37054152
• 𝑏: hệ số giảm chấn [𝑁𝑚. 𝑠]
+ Sơ ồ khối của ộng cơ DC servo:
Hình 2.2: Sơ ồ khối của ộng cơ DC servo
+ Hàm truyền của ộng cơ gồm: 𝜔(𝑠) 𝐾𝑚 𝐺(𝑠) = = 𝑈(𝑠)
(𝐿𝑠 + 𝑅)(𝐽𝑠 + 𝑏) + 𝐾𝑚𝐾𝑒 𝜔(𝑠) 𝐾𝑚⁄𝑅𝑏 = 𝐾 𝐺(𝑠) = ≈ 𝑈(𝑠) 𝑠 + 1) ( 𝑠 + 1)
(𝜏𝑒𝑠 + 1)(𝜏𝑚𝑠 + 1) Trong ó,
• 𝜏𝑒 = 𝑅𝐿: hằng số thời gian iện (𝑠)
• 𝜏𝑚 = 𝑏𝐽: hằng số thời gian cơ (𝑠) thông thường, 𝜏𝑚 ≫ 𝜏𝑒
Chúng ta có thể tóm tắt công thức hàm truyền ộng cơ dưới dạng hàm truyền bậc 1: 𝜔(𝑠) 𝐾 𝐺(𝑠) = ≈ 𝑈(𝑠) 𝜏𝑚𝑠 + 1
2.2.2. Mô hình thực tế của hệ ộng cơ DC servo một trục lOMoARcPSD| 37054152
Hình 2.3: Mô hình hệ servo một trục
+ Bảng ặc tính của ộng cơ DC servo No. Parameters Symbol Units DCM50205 1 Continuous Torque (Max) 𝑇𝐶 𝑁𝑚 0.25 2 Peak Torque (Stall) 𝑇𝑃𝐾 𝑁𝑚 1.59 3 Rated Speed 𝑆𝑅 𝑟𝑝𝑚 3400 4 Rotor Inertia 𝐽𝑀 𝑘𝑔. 𝑚2 3.11 × 10−5 5 Rated Voltage 𝐸 𝑉 24 6 Rated Current 𝐼 𝐴 2.95 7 Torque Constant 𝐾𝑇 𝑁𝑚/𝐴 52 × 10−3 8 Resistance 𝑅𝑇 Ω 0.8 9 Peak Current (Stall) 𝐼𝑃 𝐴 21.6 10 Encoder Resolution - Steps/rev 1000 + Thông số tải trọng:
• Khối lượng: 𝑚 = 0.81774 𝑘𝑔 • Vật liệu: Thép CT3
• Bán kính: 𝑅 = 0.025 𝑚 lOMoARcPSD| 37054152
+ Do ó, mô men quán tính của tải ược tính như sau: 𝐽𝐿 = 𝑚𝑟 = × 0.81774 × 0.0252
= 2.56 × 10−4 [𝑘𝑔. 𝑚2]
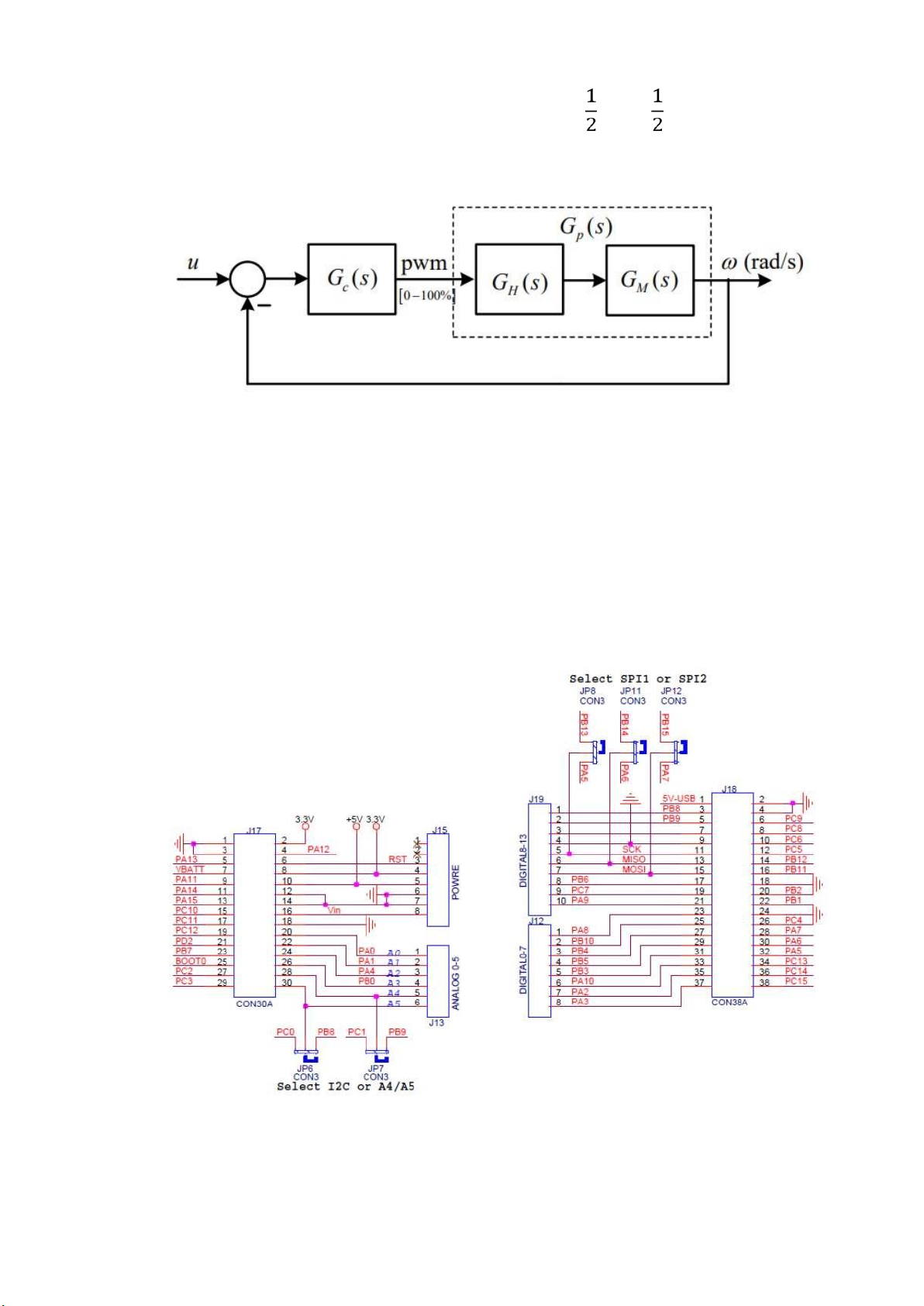
2.2.3. Sơ ồ khối tổng quát
Hình 2.4: Sơ ồ khối tổng quát của bộ iều khiển Trong ó,
• 𝐺𝑐: Bộ iều khiển PID
• 𝐺𝐻: Hàm truyền mạch cầu H
• 𝐺𝑀: Hàm truyền của ộng cơ và tải 2.3 THỰC NGHIỆM
2.3.1. Sơ ồ kết nối phần cứng
Hình 2.5: Sơ ồ chân I/O của board STM32F103 lOMoARcPSD| 37054152
Hình 2.6: Sơ ồ phần cứng và nối dây
Hình 2.7: Sơ ồ chân mạch nạp/debug
Hình 2.8: Sơ ồ chân và kết nối của mạch cầu H lOMoARcPSD| 37054152
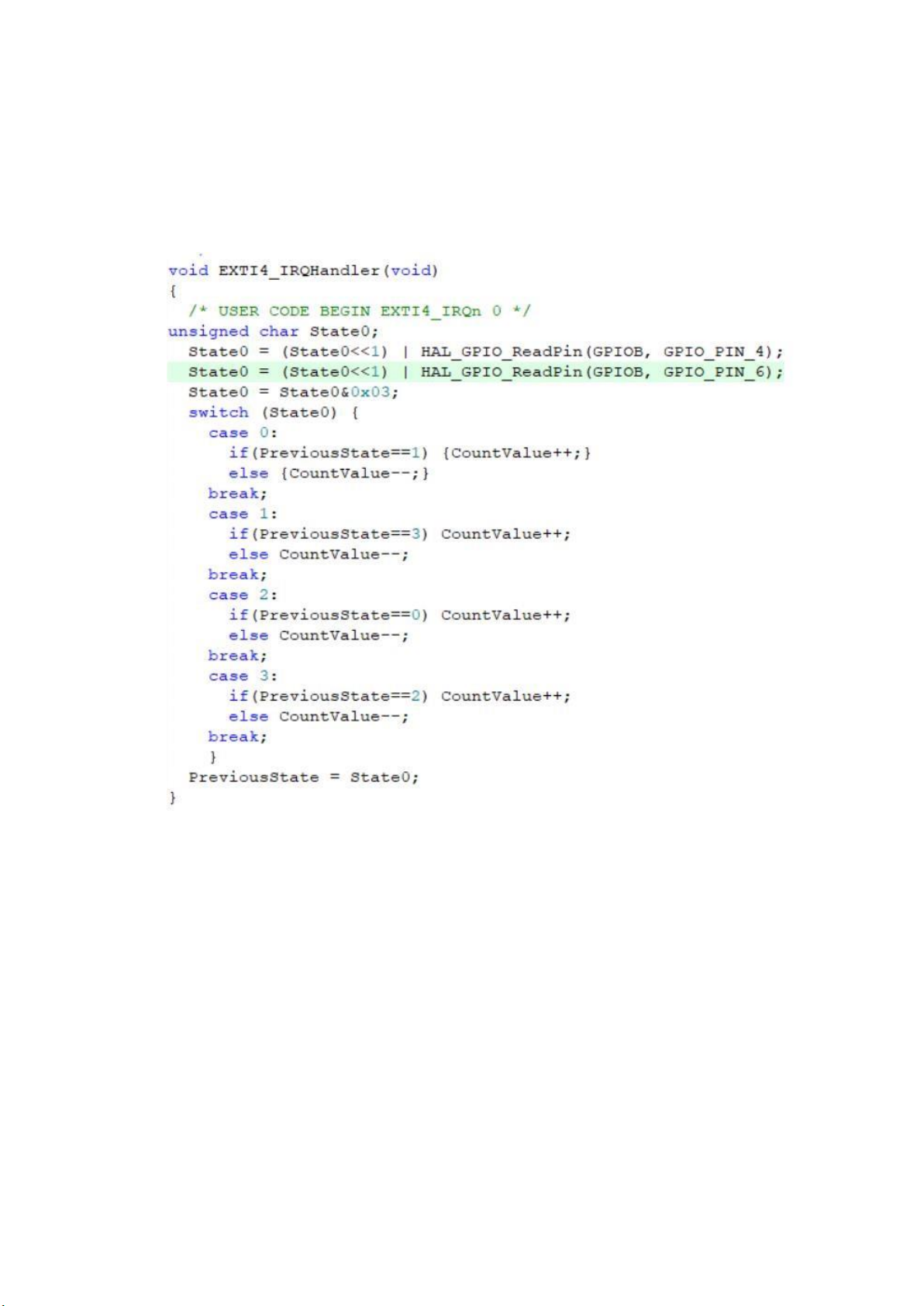
2.3.2. Lập trình vi iều khiển
+ Đọc encoder: Dùng 2 ngắt ngoài EXTI4 (PB4) và PB6 (EXTI6).
+ Tạo xung PWM: Dùng ngắt timer TIM3_CH2 (PC7). + Ngắt timer: TIM4
+ Chương trình ọc encoder
Hình 2.9: Code mẫu ọc encoder ở kênh A chế ộ 4x
+ Chương trình bộ iều khiển PID số: lOMoARcPSD| 37054152
Hình 2.10: Code mẫu về bộ iều khiển PID số
2.3.3. Tiến hành thí nghiệm
Hình 2.11: Đồ thị mô phỏng tốc ộ trên CubeMonitor lOMoARcPSD| 37054152
BÀI 3: HỆ THỐNG SERVO ĐA TRỤC SỬ DỤNG ĐỘNG CƠ AC SERVO
VÀ MODULE ĐIỀU KHIỂN CHUYỂN ĐỘNG 3.1. Cơ sở lý
thuyết • Nội dung thí nghiệm
• Động cơ và trình iều khiển servi AC
• Lập trình PLC Mitsubishi
• Bộ iều khiển chuyển ộng FX3U-20SSC-H
• Nội suy tuyến tính và hình tròn
3.2. Giới thiếu hệ thống • Phần cứng lOMoARcPSD| 37054152 1: Main CB 2: PLC Mitsubishi FX3U-32M 3: Module FX3U-20SSC-H 4,5: Servo Drivers (MR-3J-B) 6: Relays 7: Nguồn 24VDC, 10A
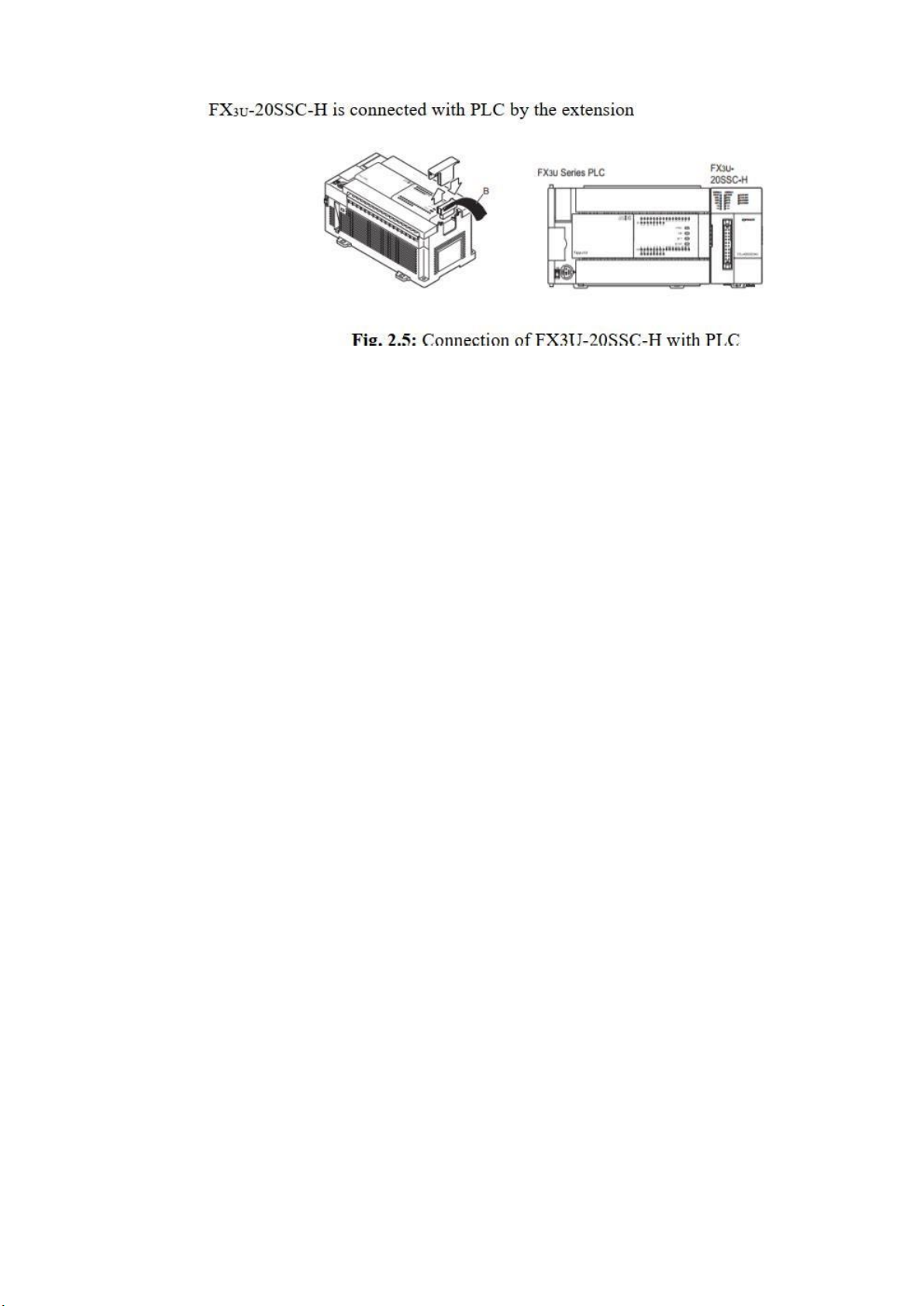
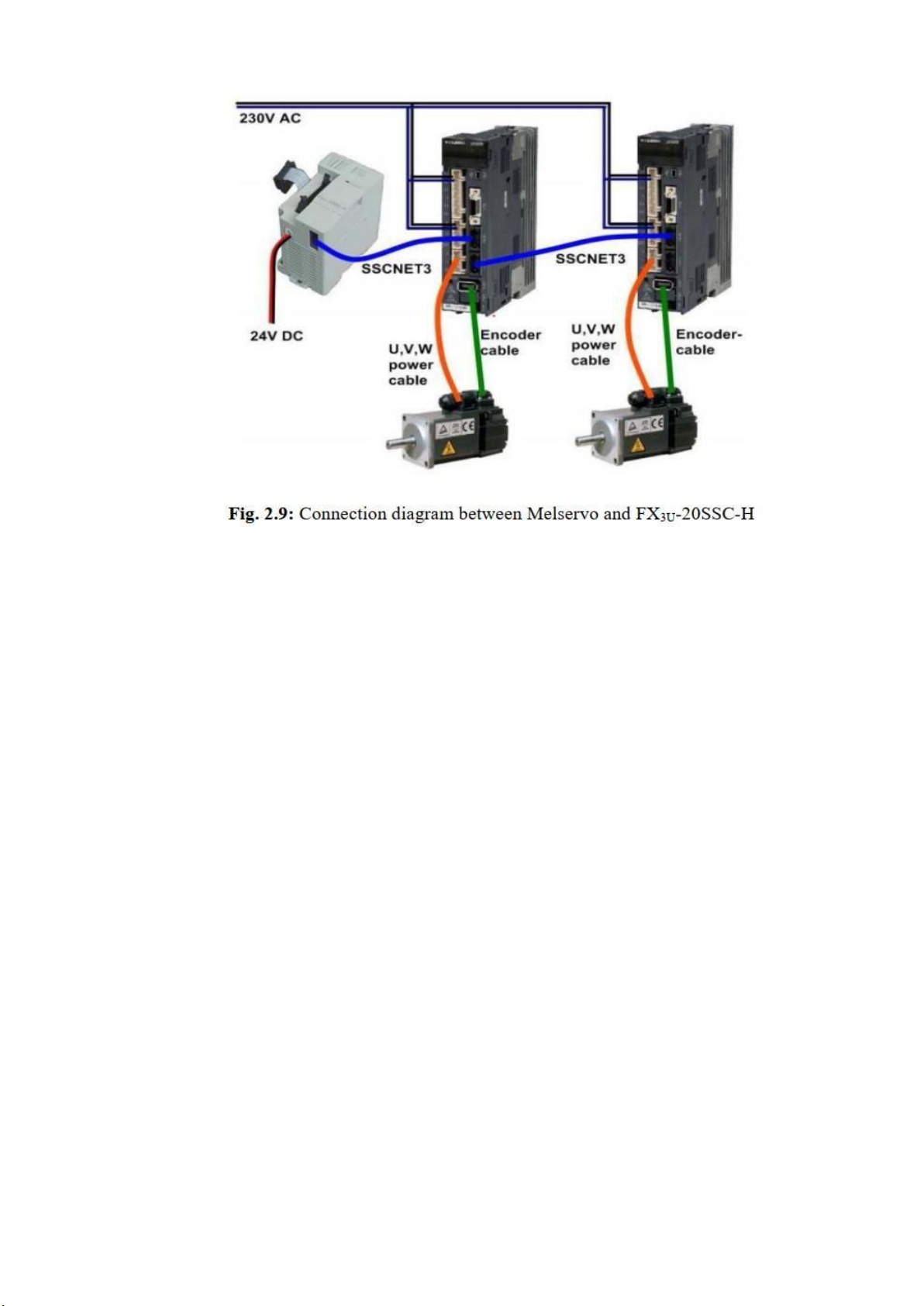
• Điều khiển 2 trục FX3U-20SSC-H
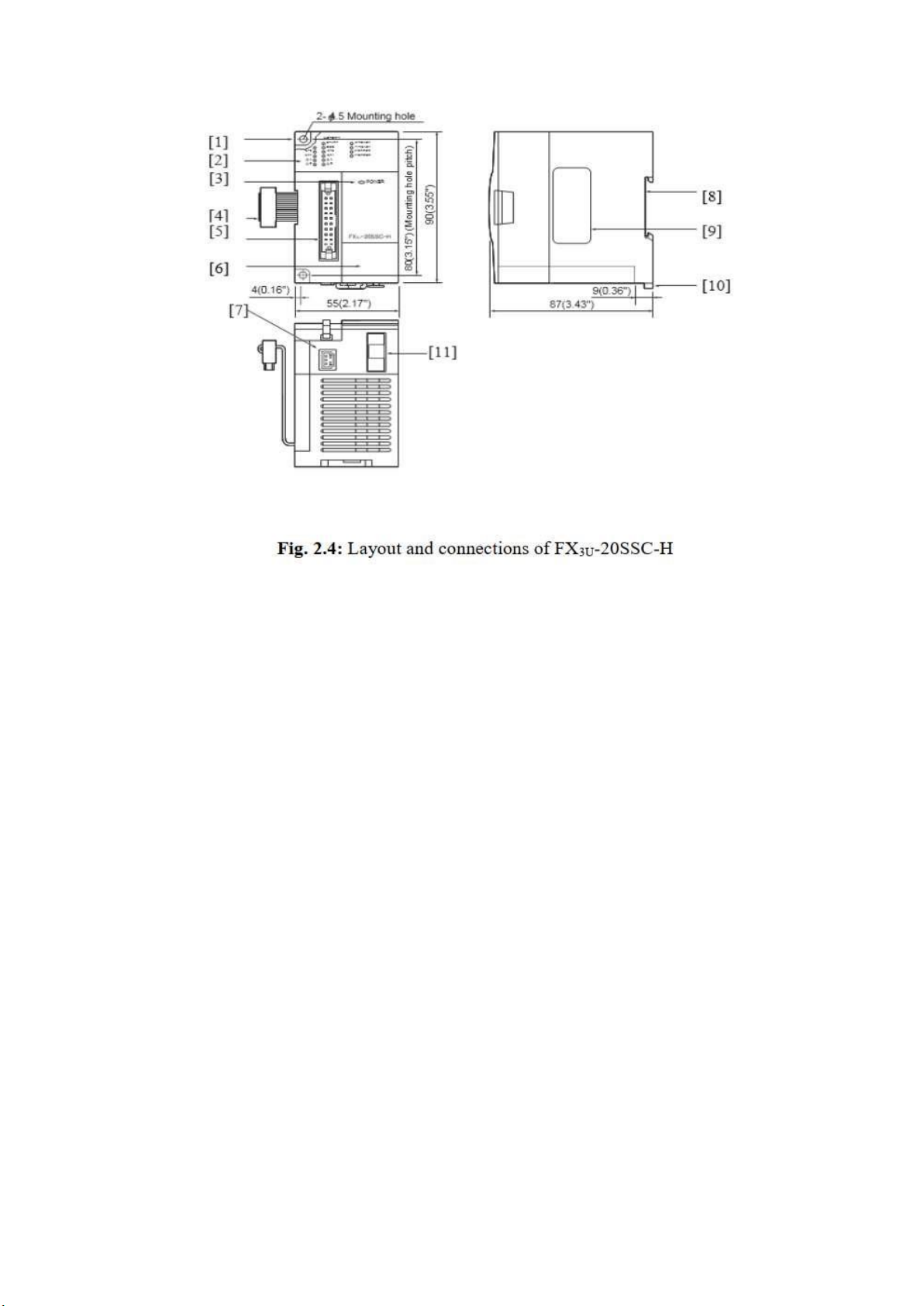
FX3U-20SSC-H là khối chức năng ặc biệt iều khiển vị trí, tốc ộ của AC servo ộng cơ
qua cáp SSCNETIII; tương thích với AC Servo MR-J3- □B. Nó có thể iều khiển tới 2
Động cơ servo AC với phép nội suy ường thẳng và ường tròn. lOMoARcPSD| 37054152 1: Direct mounting hole 2: LED khởi ộng 3: LED nguồn 4: Cable mở rộng 5: Cổng kết nối 6: Top cover 7: Đầu nối nguồn 8: DIN rail mounting groove 9: Name plates 10: DIN rail mounting hook 11: SSCNET III connector Kết nối với PLC lOMoARcPSD| 37054152
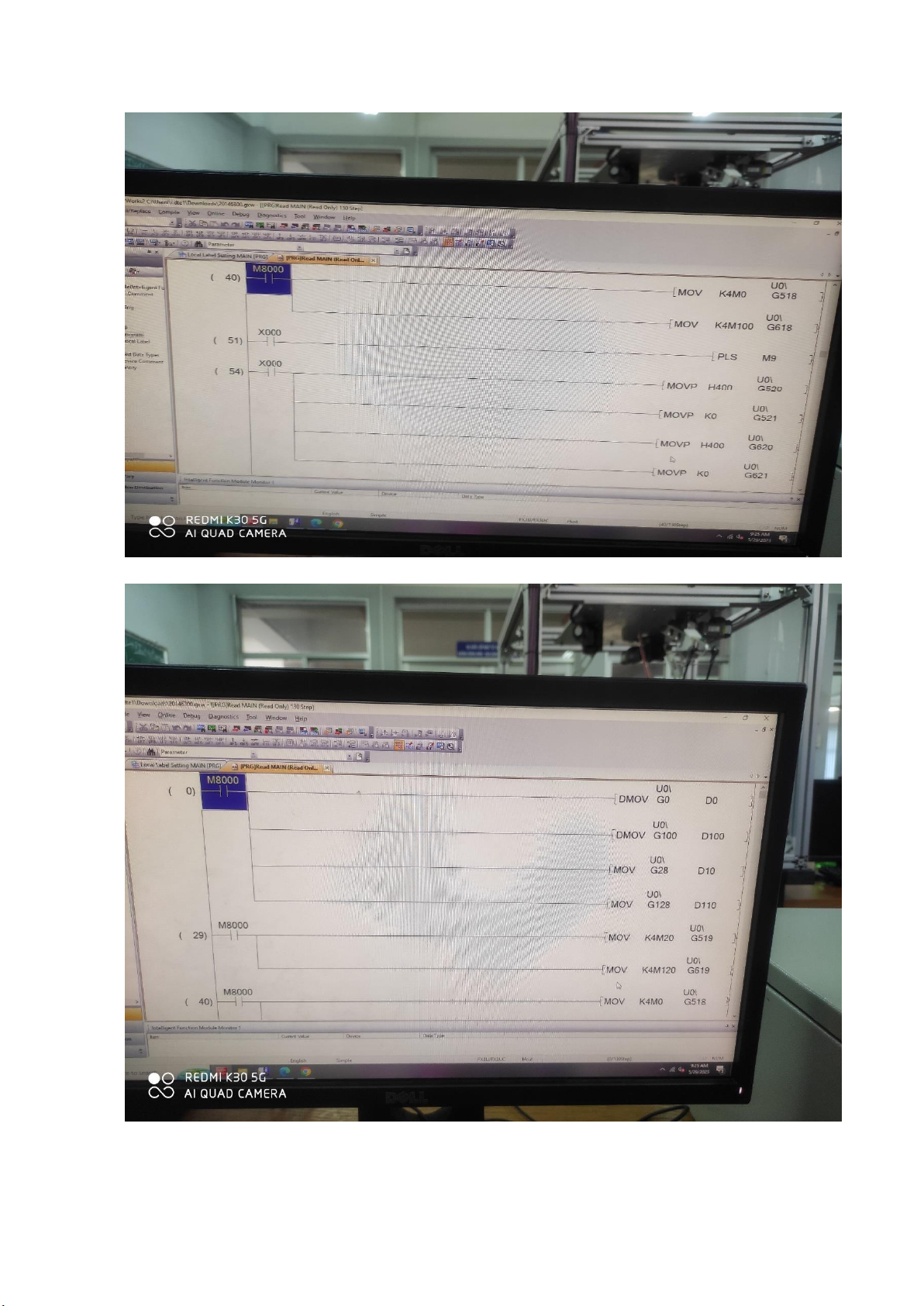
Bộ nhớ ệm (BFM): PLC có thể truy cập trực tiếp vào bộ nhớ ệm, sử dụng các chương
trình tuần tự. 20SSCH sử dụng các tham số ịnh vị và dữ liệu trong khu vực này ể thực
hiện iều khiển ịnh vị. Các kiểu dữ liệu và ứng dụng của chúng ược mô tả ngắn gọn
trong bảng sau. ể biết chi tiết thông số kỹ thuật, vui lòng tra cứu hướng dẫn sử dụng 20SSC-H.
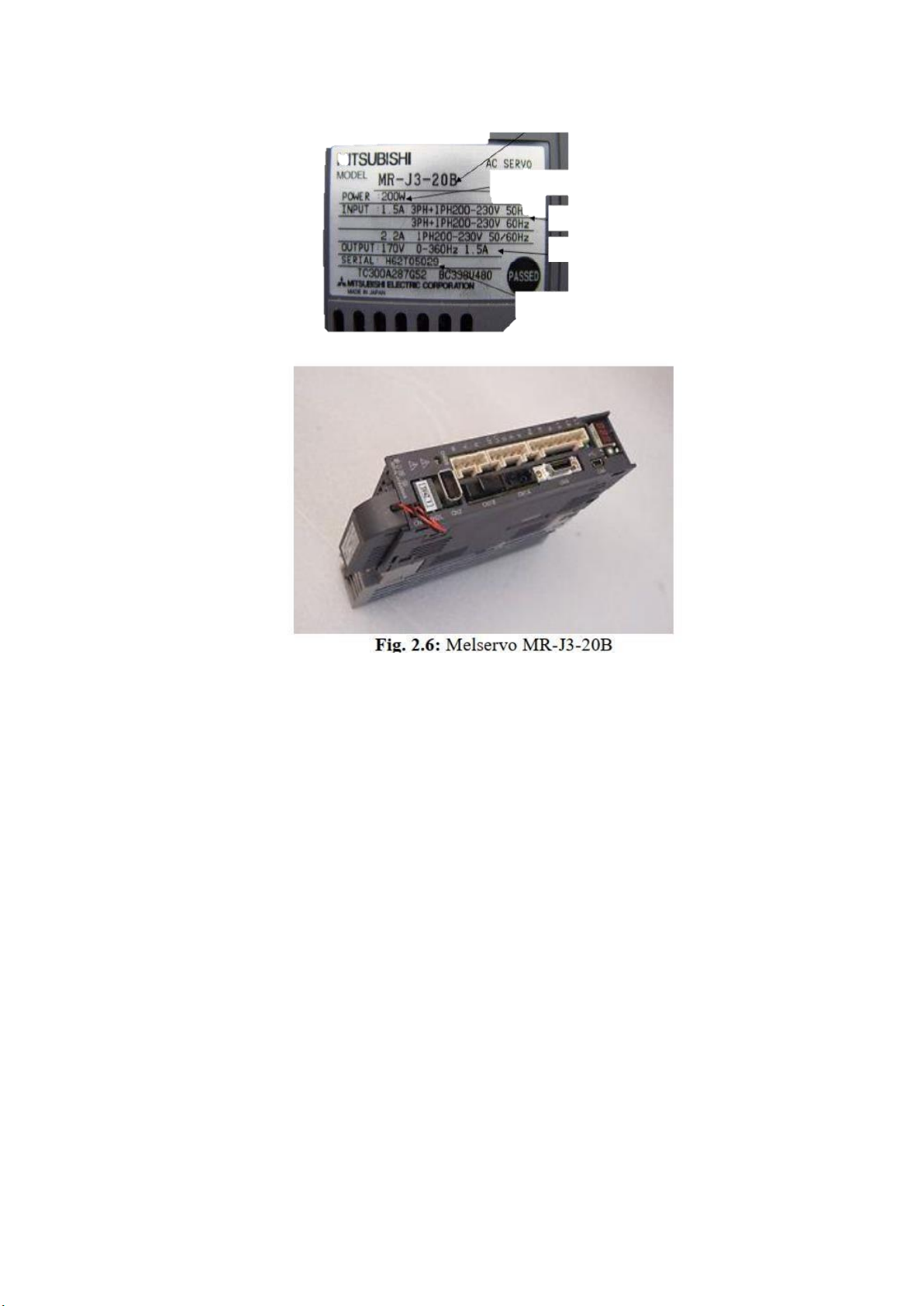
Melservo MR-J3-B: Mitsubishi MELSERVO-J3, AC servo a năng, còn cao hơn nữa
hiệu suất và các chức năng cao hơn so với dòng MELSERVO-J2-Super hiện tại. Giới
hạn mô-men xoắn với mạch kẹp ược ặt trên bộ khuếch ại servo ể bảo vệ bóng bán dẫn
iện của mạch chính từ quá dòng gây ra bởi nhanh chóng tăng tốc/giảm tốc hoặc quá
tải. Ngoài ra, giá trị giới hạn mô-men xoắn có thể ược thay ổi thành giá trị mong muốn
trong bộ iều khiển. MELSERVO MR-J3 có chức năng giao tiếp USB, sử dụng một PC
ể thực hiện cài ặt tham số, giám sát, giám sát trạng thái, iều khiển khuếch ại và AC
servo thông qua phần mềm MR Configurator.44 MELSERVO-J3□B có mã hóa vị trí
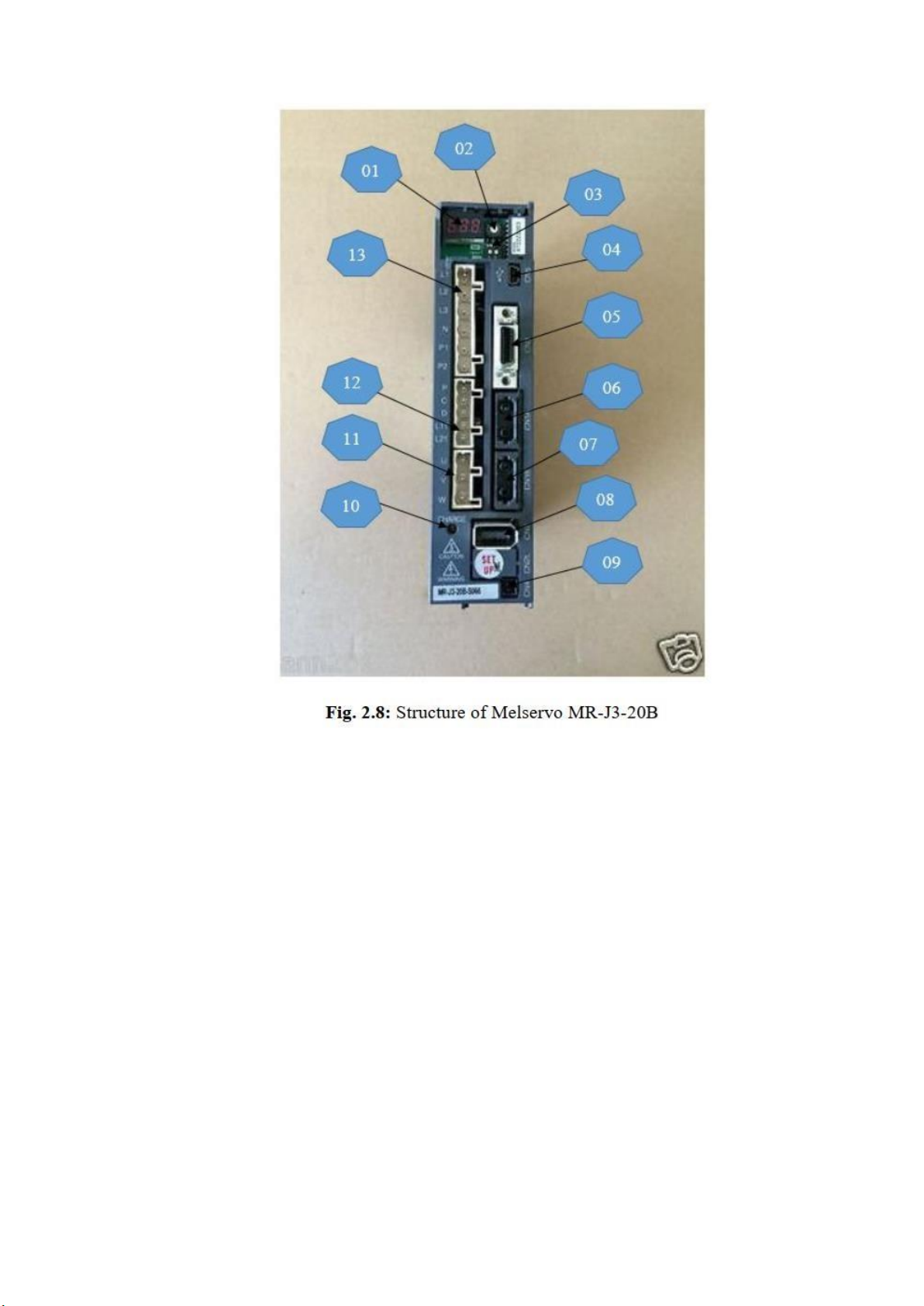
tuyệt ối với ộ phân giải xung/vòng 262144 ể ảm bảo kiểm soát chính xác hơn MELSERVO-J2-Super. lOMoARcPSD| 37054152 lOMoARcPSD| 37054152 1: Màn Hình 8: CN2 2: SW1 9: CN4 3: SW2 10: Đèn sạc 4: CN5 11: CNP3 5: CN3 12: CNP2 6: CN1A 13: CNP1 7: CN1B lOMoARcPSD| 37054152 • Cáp SSCNET III
Cáp SSCNET III sử dụng giao tiếp quang, giao tiếp hai chiều với ộ chính xác cao tốc ộ
truyền tải. Đây là loại cáp chuyên dụng, có thể kết nối và ngắt kết nối dễ dàng, do sử
dụng phương thức giao tiếp quang nên khả năng bị nhiễu sóng cao.Với tốc ộ truyền lên
tới 150 Mbps, cáp SSCNET III có thể xử lý tối a ba nhanh gấp nhiều lần so với các
phương pháp truyền dẫn truyền thống. lOMoARcPSD| 37054152
3.3. Tiến hành thí nghiệm lOMoARcPSD| 37054152 lOMoARcPSD| 37054152 Bài thí nghiệm A lOMoARcPSD| 37054152
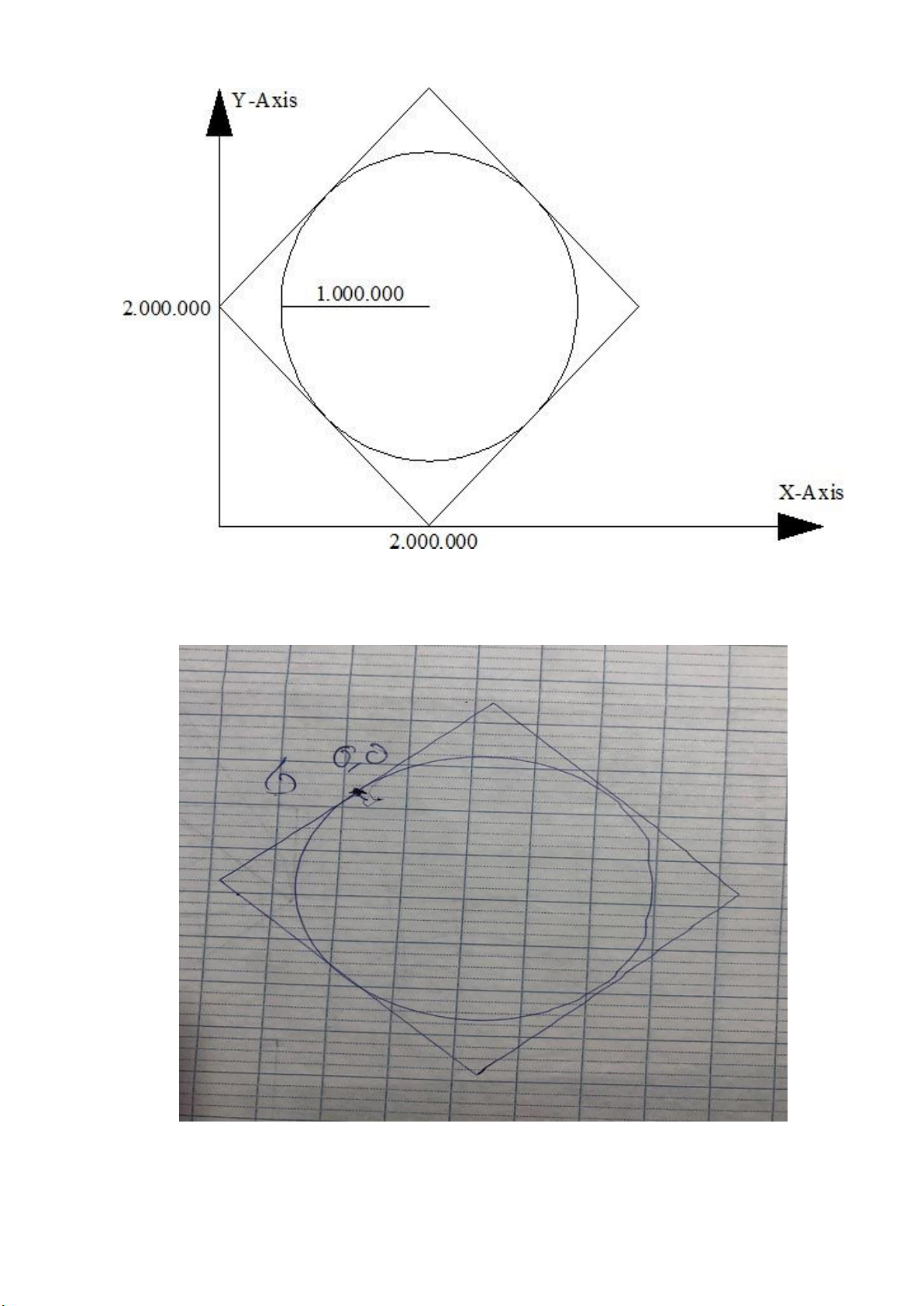
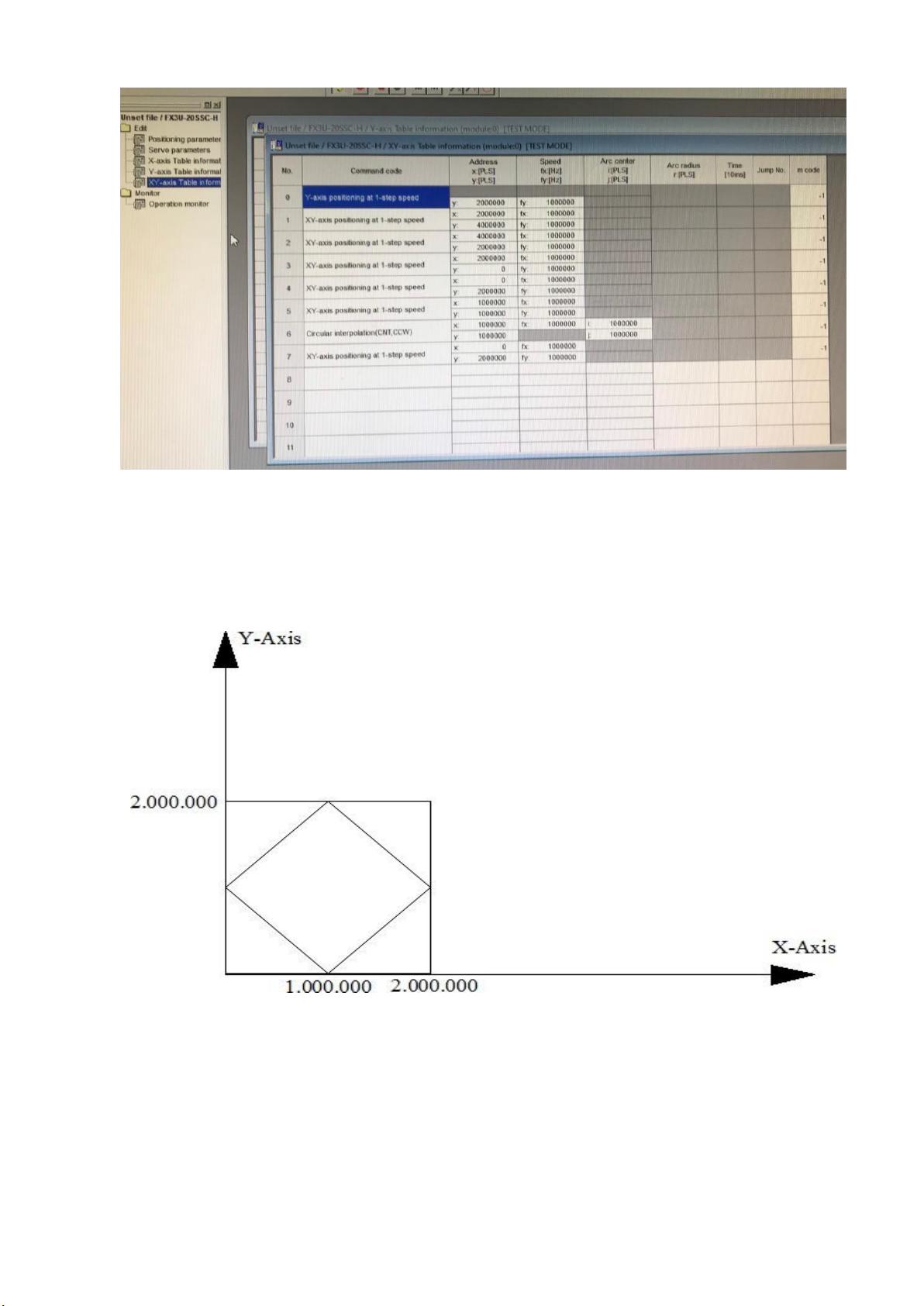
Hình 9: a) Hình ảnh bài 3a b) Hình ảnh thực tế bài 3a lOMoARcPSD| 37054152 a) b) lOMoARcPSD| 37054152 c)
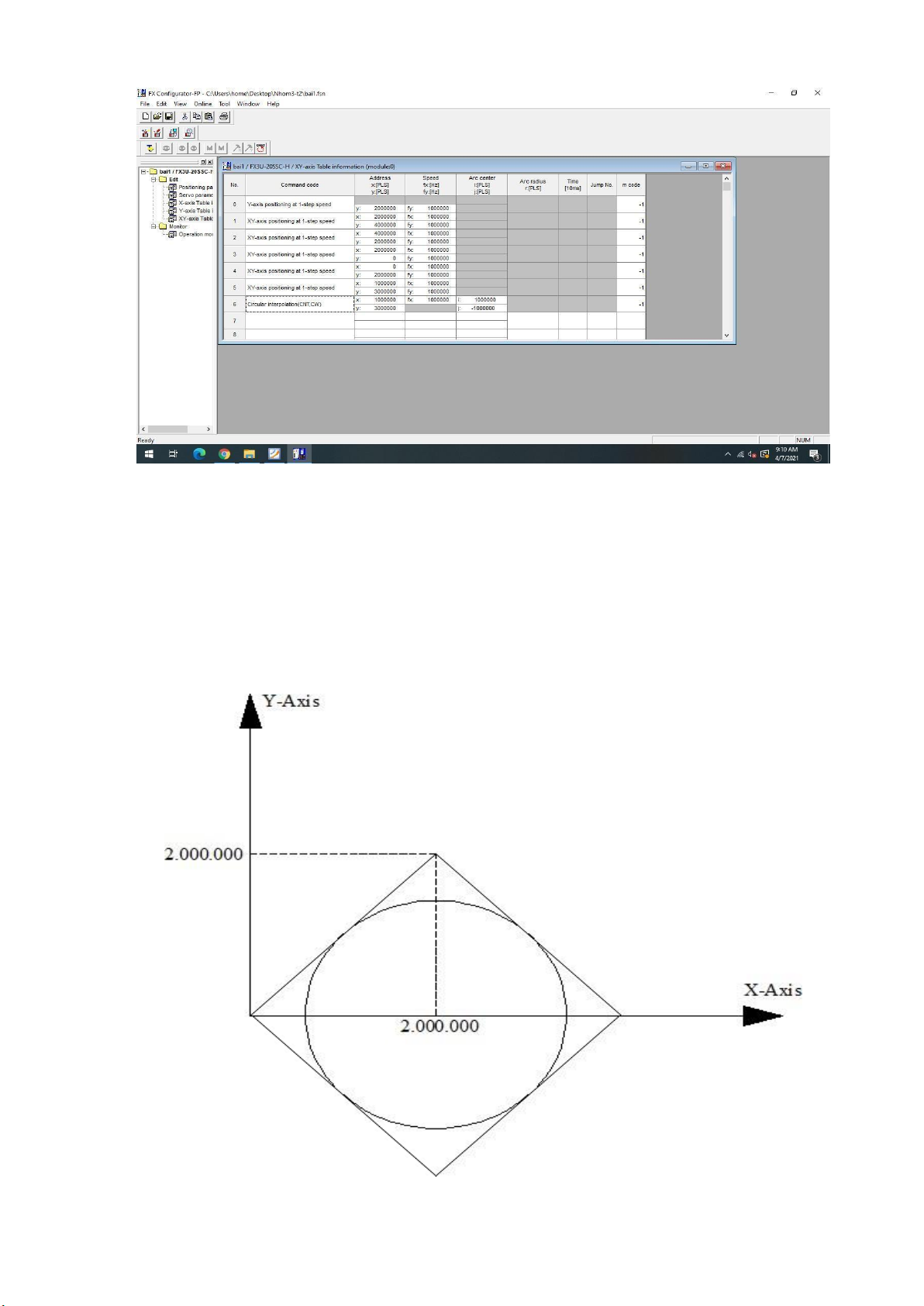
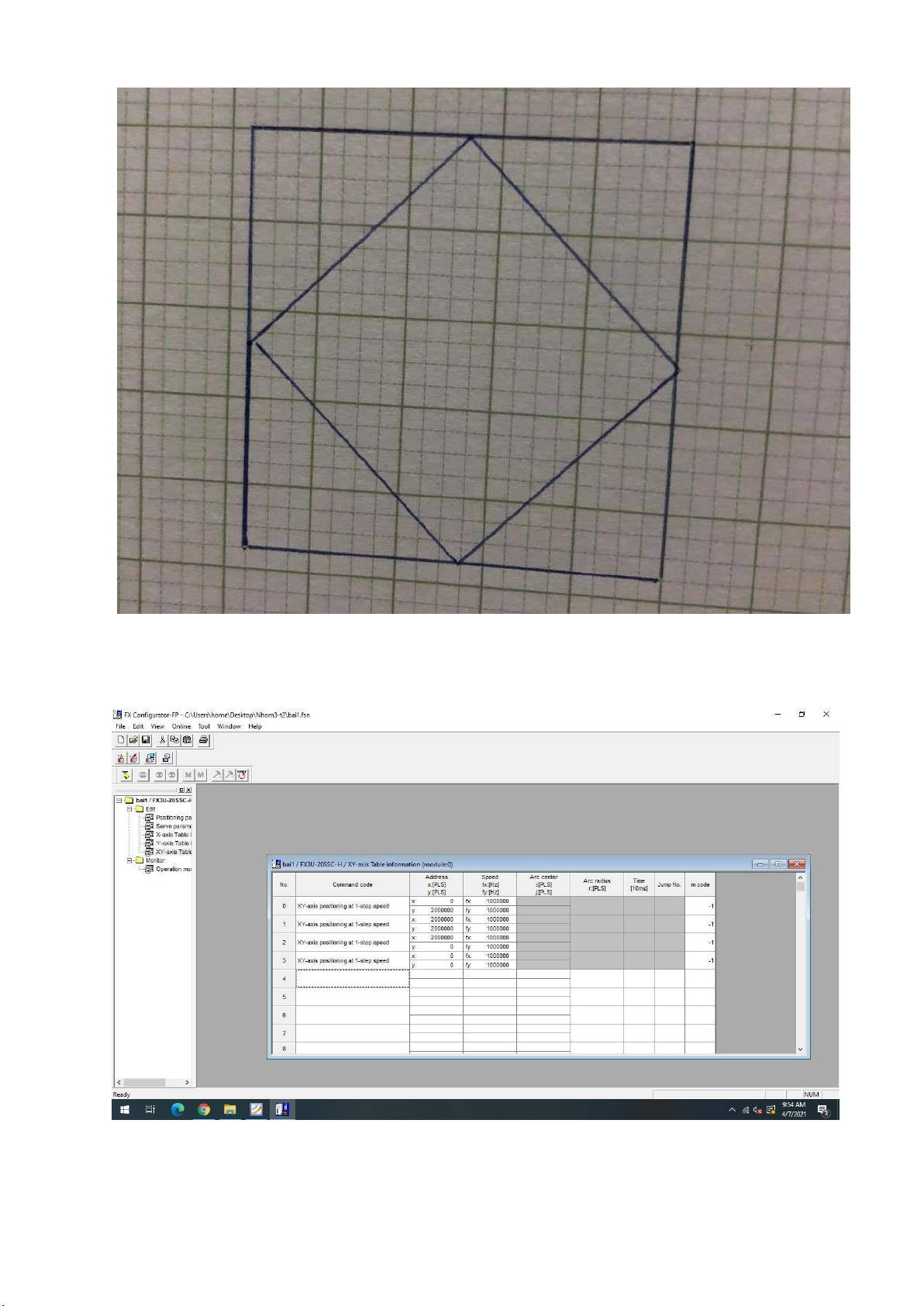
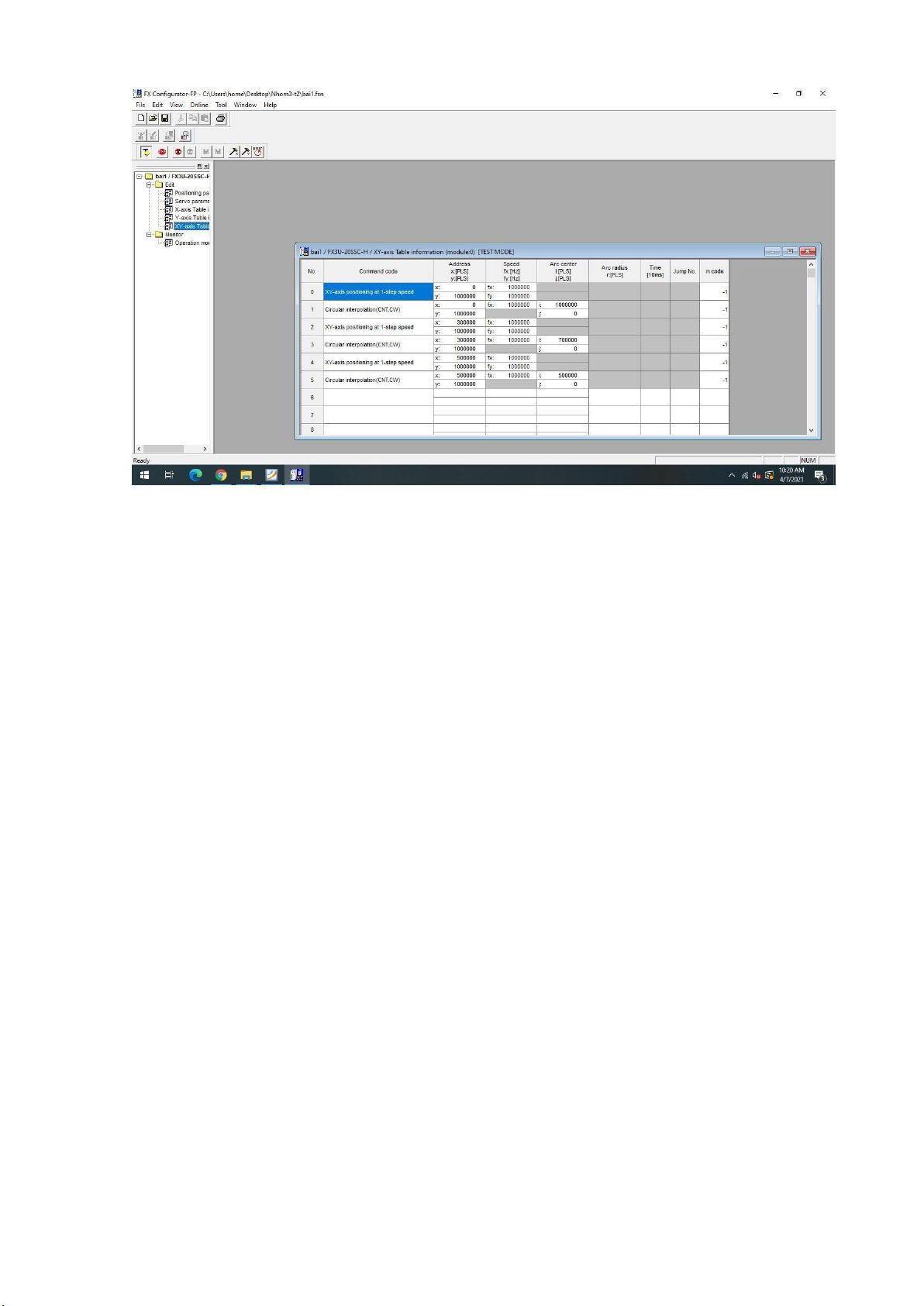
Hình 10: a) Hình ảnh bài 3b b) Hình ảnh thực tế bài 3b c) Tọa ộ a) lOMoARcPSD| 37054152 b) lOMoARcPSD| 37054152 c)
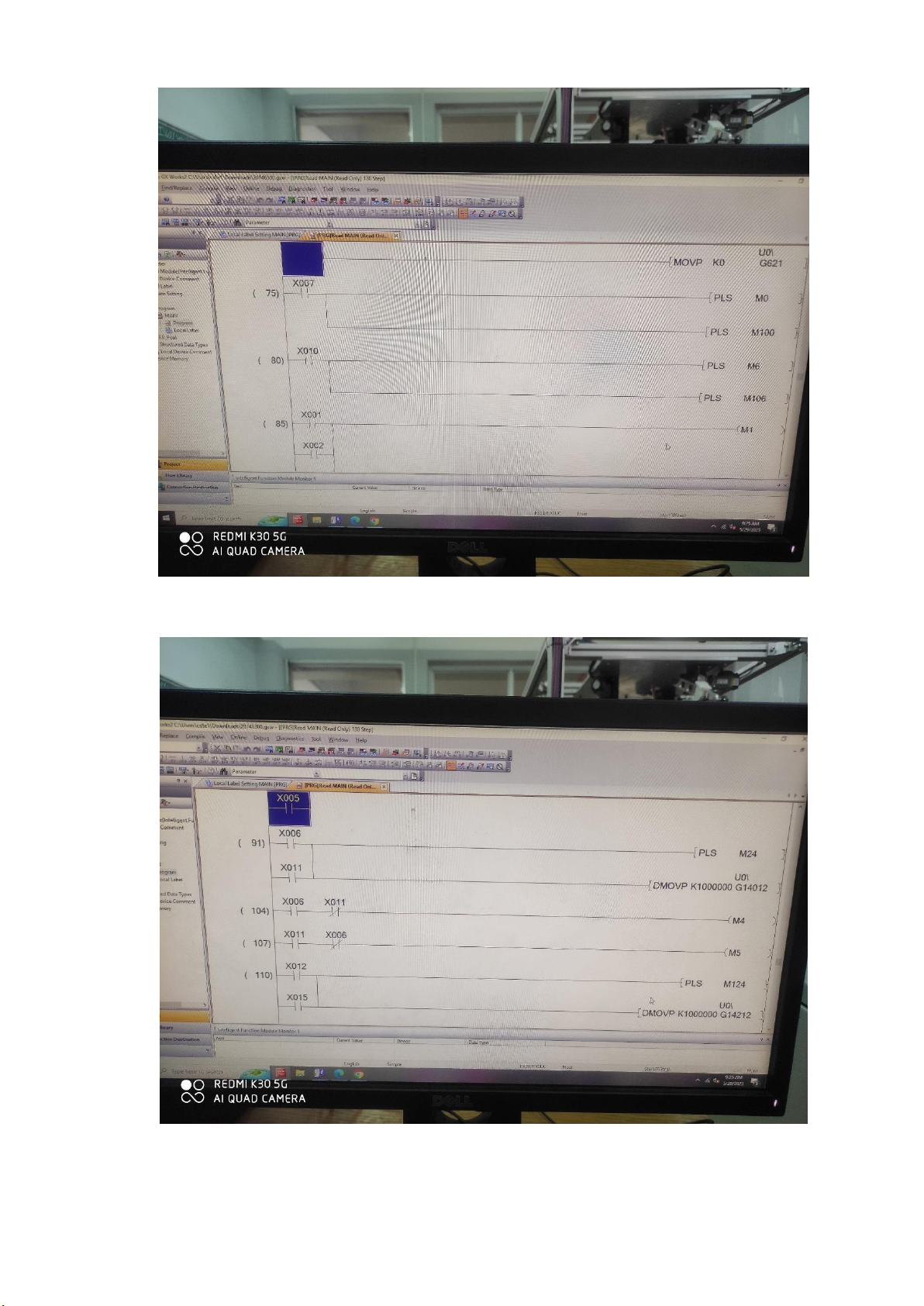
Hình 10: a) Hình ảnh bài 3c, b) Hình ảnh thực tế bài 3, c) code iều khiển. a) lOMoARcPSD| 37054152 b) c) lOMoARcPSD| 37054152 c’)
Hình 12: a) Hình ảnh bài 3d, b) Hình ảnh thực tế bài 3d, c,c’) code iều khiển a) lOMoARcPSD| 37054152 b) c) lOMoARcPSD| 37054152
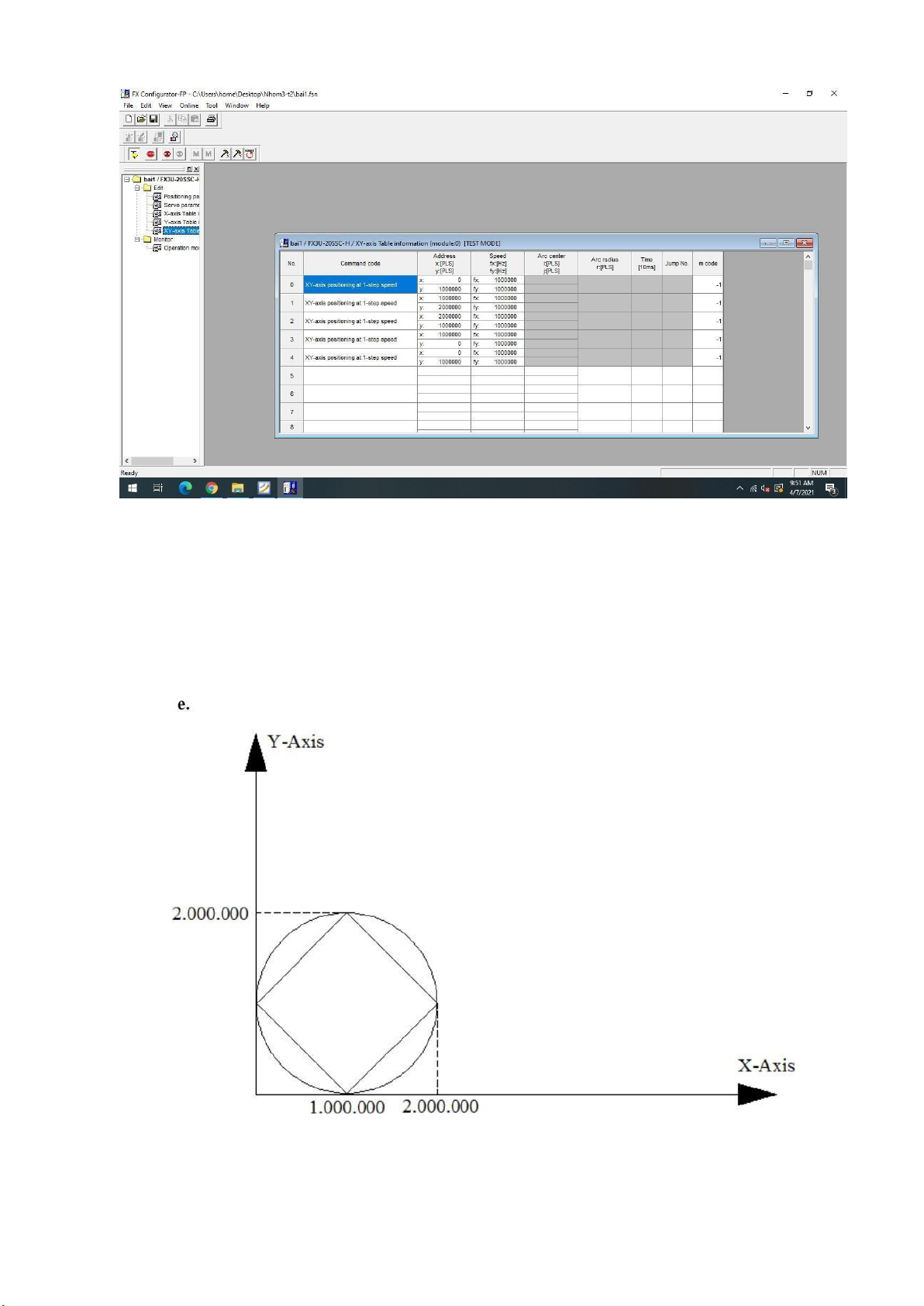
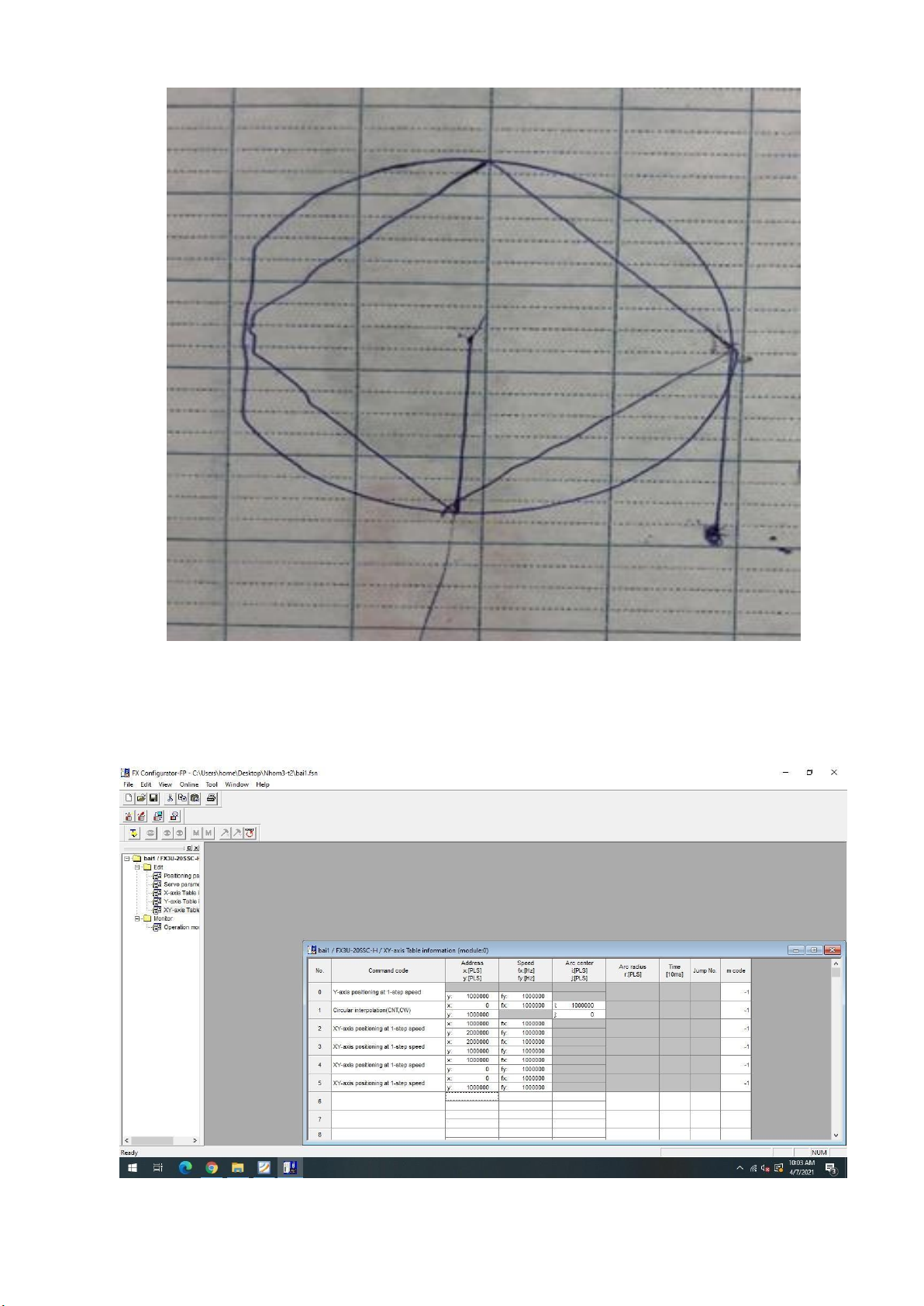
Hình 13: a) Hình ảnh bài 3e, b) Hình ảnh thực tế bài 3e, c) code iều khiển a) b) lOMoARcPSD| 37054152
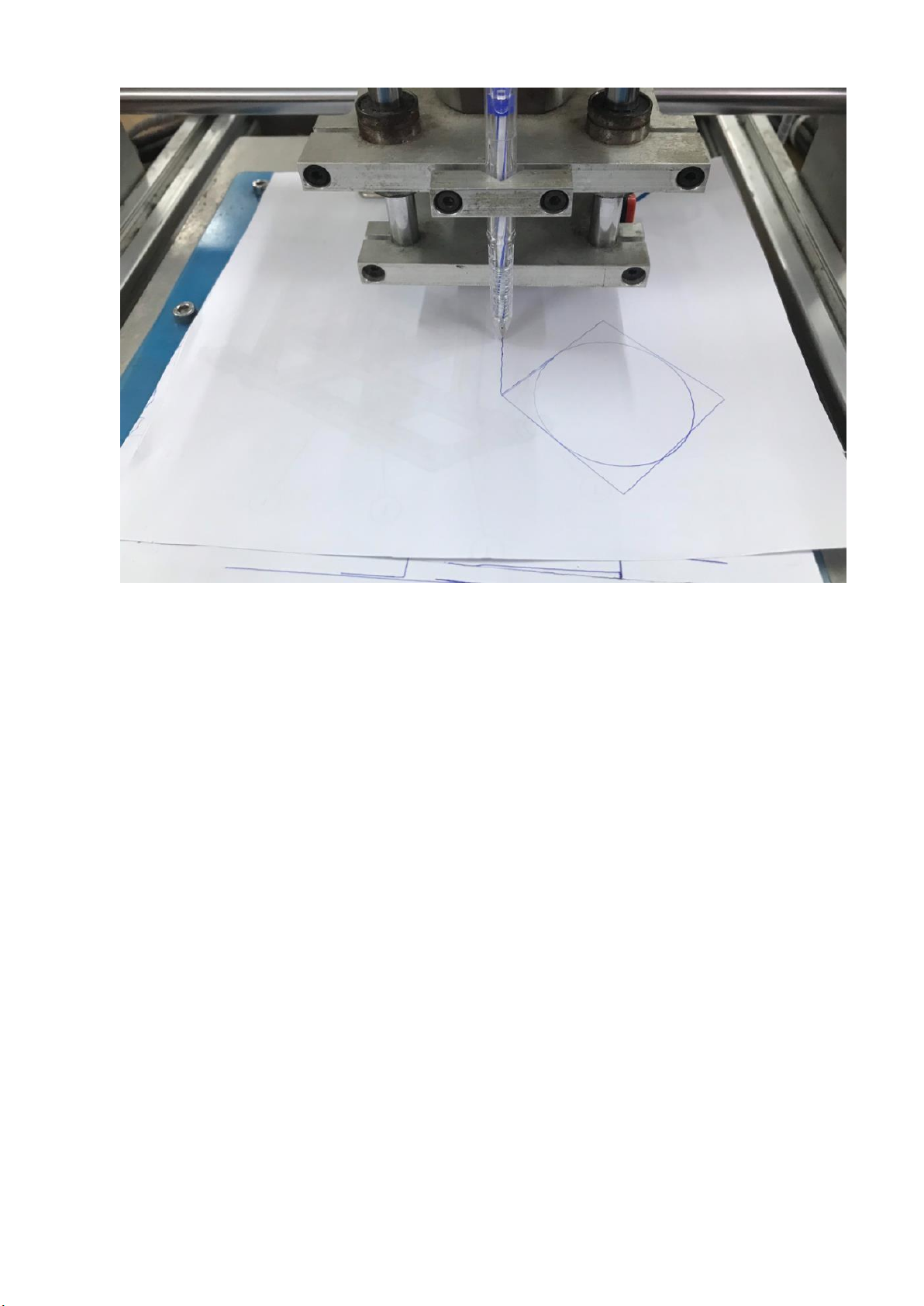
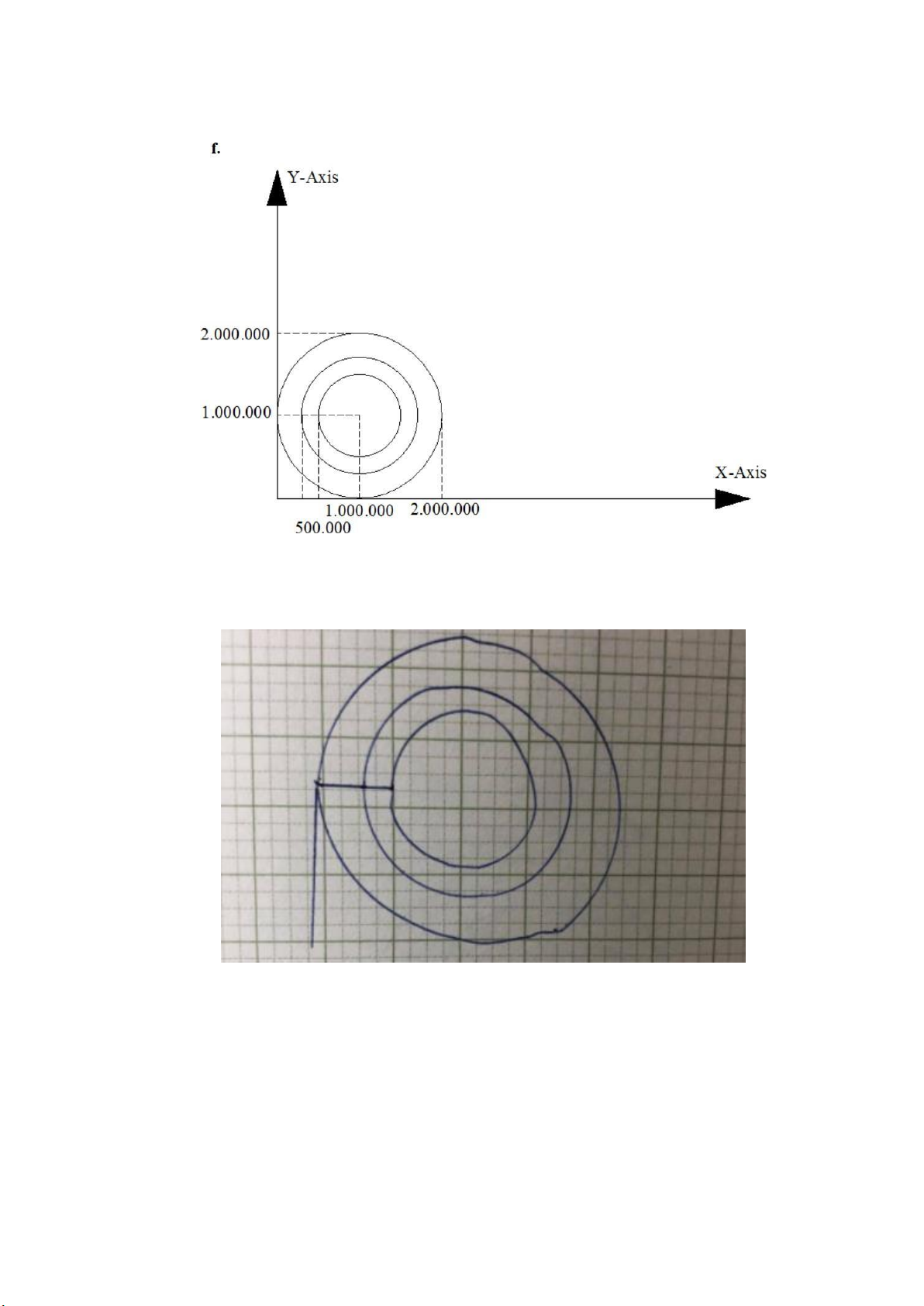
Hình 14: a) Hình ảnh bài 3f b) Hình ảnh thực tế bài 3f, c) code iều khiển. NHẬN XÉT:
Sai số và ộ lệch của hình vẽ sinh ra do gá bút và cố ịnh mặt phẳng giấy không vững. tiếp
xúc giữa ầu bút mà mặt phẳng quá lớn cũng tạo ra sai số và làm hình vẽ không ược ẹp
Hình vẽ không ược ẹp, khi set vận tốc cao hơn thì hình vẽ sẽ ẹp hơn Máy thường xuyên
bị lỗi trục X, làm cho hình vẽ không hoàn hiện. Sau khi chạy 1 lần phải reset error BÀI
4: HỆ THỐNG SERVO THỦY LỰC
4.1. CƠ SỞ LÝ THUYẾT
o Giới thiệu hệ thống servo thủy lực o
Analog modules: FX2N-2AD, FX2N-4DA o
Bộ iều khiển PID của PLC FX3U
4.2. GIỚI THIỆU CHUNG VỀ MÔ HÌNH THÍ NGHIỆM
4.2.1. Tổng quát về mô hình
Giới thiệu chung về mô hình thí nghiệm ược thể hiện trên Hình 1 lOMoARcPSD| 37054152
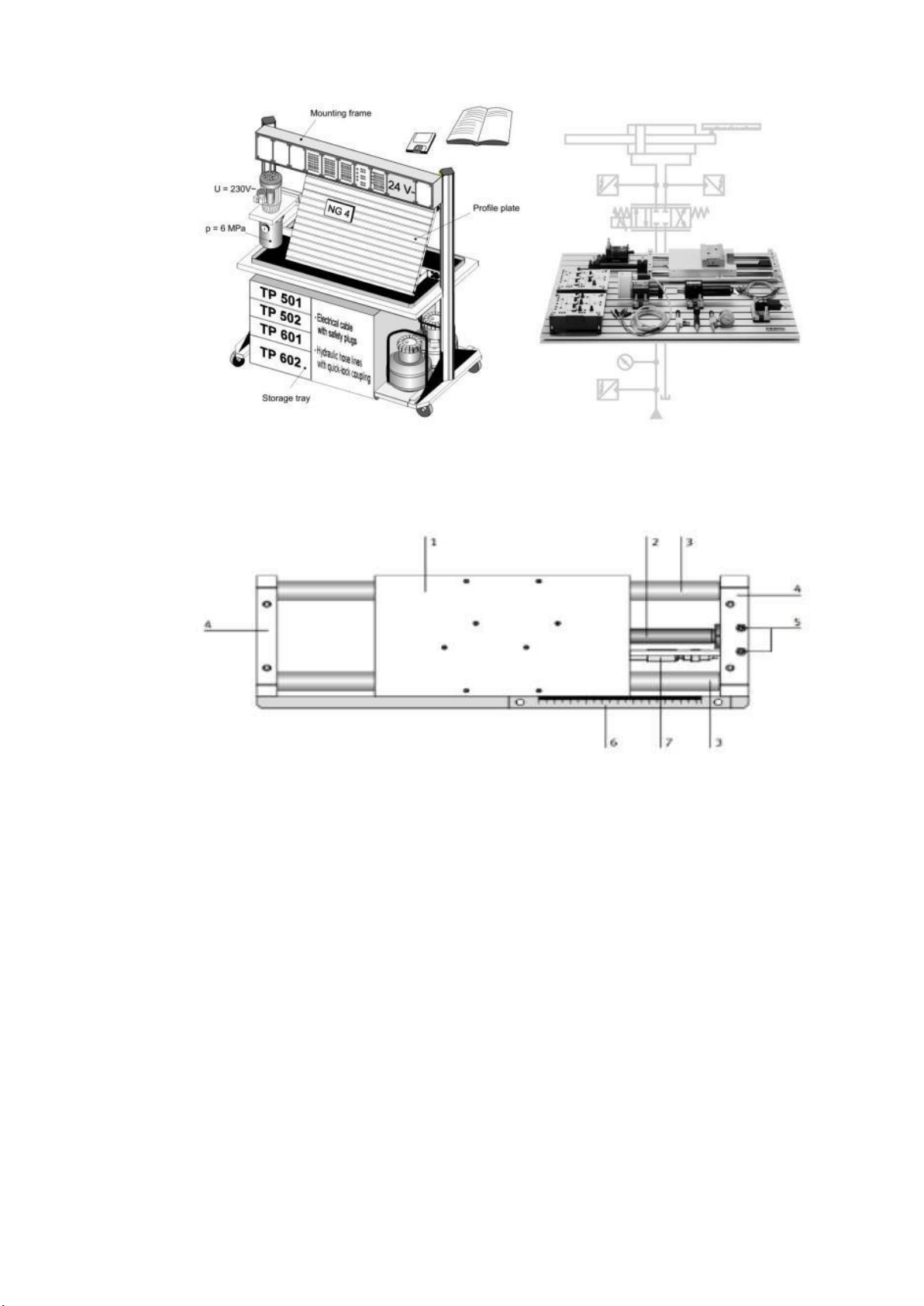
Hình 4.1: Mô hình thí nghiệm hệ thống thủy lực
* Bộ bàn trượt tuyến tính
Hình 4.2: Bộ bàn trượt tuyến tính Cấu tạo
Bộ bàn trượt tuyến tính gồm những thành phần sau : 1 bàn trượt
2 xy lanh tác ộng hai chiều 3 hai thanh dẫn hướng 4 hai mặt bích
5 hai khớp nối ể kết nối ống thủy lực 6 thước tỉ lệ
7 cảm biến hành trình chiết áp
Các buồng xy lanh ược cung cấp áp suất dầu thông qua các khớp nối nhanh giữa ống
dẫn dầu và ầu nối (5). Áp suất trong bồn chứa tác ộng vào bề mặt làm việc của piston lOMoARcPSD| 37054152
sinh ra một lực tác ộng lên bàn trượt. Tốc ộ trượt của bàn trượt ược xác ịnh dựa vào lưu lượng dầu qua xy lanh.
Bàn trượt lắp với các thanh ỡ thông qua ổ bi ỡ nên ma sát rất bé. Cảm biến hành trình
chiết áp ược bố trí bên dưới mặt bàn trượt, ngay bên cạnh xy lanh thủy lực do vậy nó ược bảo vệ tốt hơn.
Thước tỉ lệ gắn trực tiếp lên tấm ế bên hông bàn trượt, cho phép người vận hành có thể
ọc trực tiếp trị số trên thước. Thước này có thể iều chỉnh di trượt chút ít trên tấm ế *
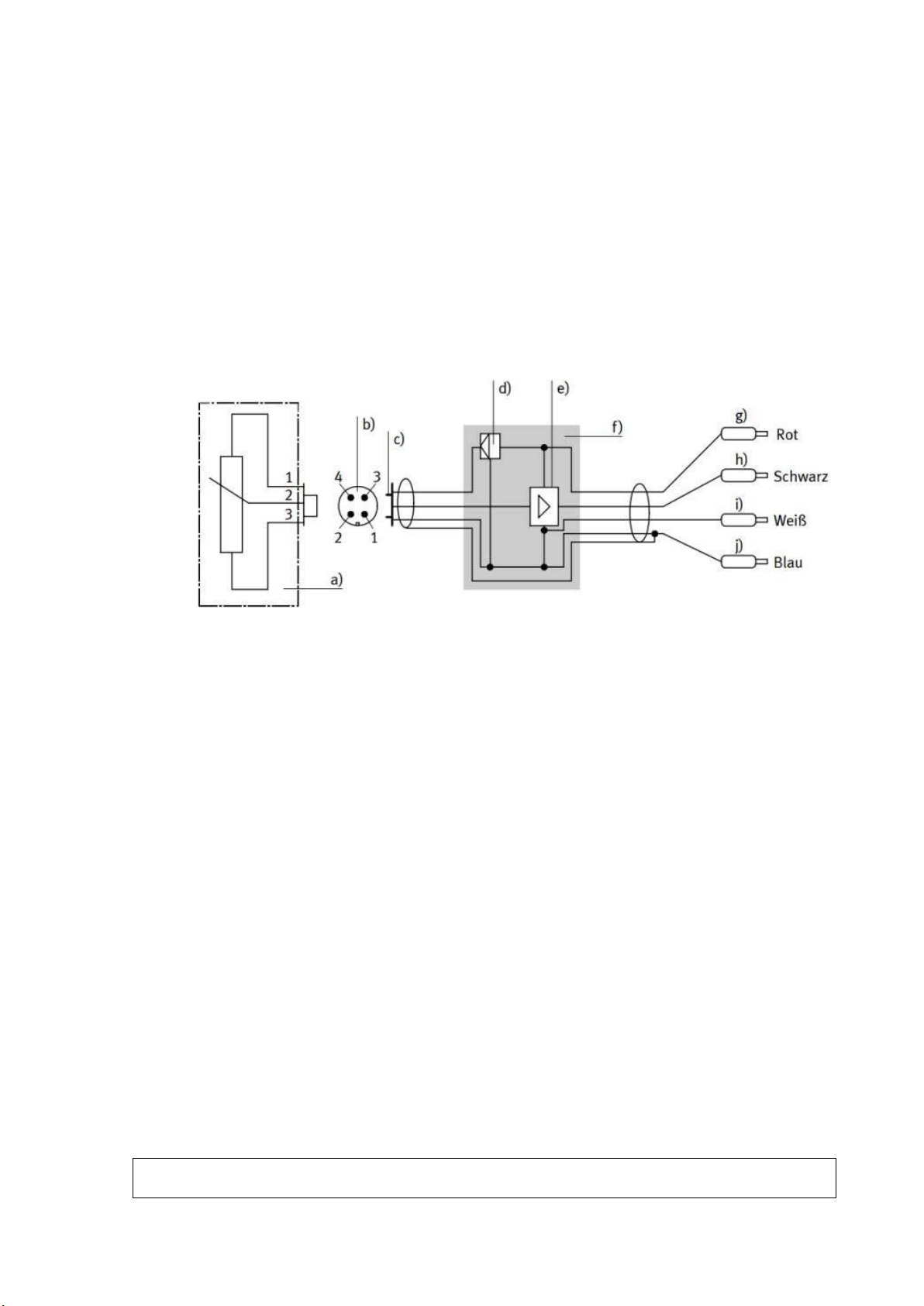
Cảm biến hành trình( Chiết áp)
Hình 4.3: Cảm biến hành trình Cấu tạo a. Chiết áp b. Sự phân bố lỗ cắm c. Nút chặn
d. Bộ tạo iện áp chuẩn e. Bộ biến trở f. Vỏ ngoài
g. Nguồn iện áp cung cấp h. Tín hiệu dương i. Tín hiệu âm
Hai ầu chiếc áp ược cấp iện áp 10V từ bộ nguồn tạo iện áp chuẩn. Điên áp của mạch
nhánh tỉ lệ với vị trí con trượt nối với bàn trượt. Do vậy iện áp ngõ ra của cảm biến sẽ tỉ
lệ với vị trí ( hay lượng dịch chuyển ) của bàn trượt. Thông số kỹ thuật
Bảng 4.1: Thông số về kích thước của bàn trượt Kích thước lOMoARcPSD| 37054152 Dài 625 mm Rộng 200 mm
Giới hạn hành trình 2100 mm 200 mm Kích thước bàn trượt 320 x 198 mm2i
Khoảng cách dịch chuyển của bàn trượt (mm) sẽ tỉ lệ với iện áp ầu ra của chiết áp theo
bảng. khoảng dịch chuyển 0…200mm ứng với iện áp ầu ra của chiết áp là 0…10V.
Bảng 4.2: Khoảng dịch chuyển của bàn trượt so với iện áp
Khoảng dịch chuyển (mm) 3
Điện áp của chiết áp (V) 0 mm 0 V 1 mm 0.05 V 10 mm 0.5 V 100 mm 5 V 200 mm 10 V
Bảng 4.3: Thông số kỹ thuật cảm biến hành trình Cảm biến hành trình
Thiết kế Đo hành trình tối a 200mm Điện áp cung cấp 13-30V Điện áp ngõ ra 0-10V Độ tuyến tính ± 0.5% Hành trình cơ khí 204mm 204mm Vận tốc tối a 1.5 m/s Nhiệt ộ làm việc -40 ến +150°C Lớp bảo vệ IP 64
Bảng 4.4: Thông số kỹ thuật của xylanh thủy lực Cơ cấu tác ộng Cơ cấu tác ộng Xy lanh d=10, D=16, L=200mm
Tỉ lệ hai phía bề mặt piston 1: 1.64 Loại dầu Dầu khoáng lOMoARcPSD| 37054152
Áp suất lớn nhất cho phép 12 Mpa(120 Bar) Kết nối thủy lực Đầu kết nối nhanh Lực tác ộng khi i tới 2400 N Lực tác ộng khi lui về 1450 N Tải trọng Tối a 50 Kg
4.2.2. Van iều khiển
Hình 4.4: Kí hiệu và sơ ồ mạch iện van ảo chiều tuyến tính 4/3 `
Hình 4.5: Kí hiệu và sơ ồ mạch iện van ảo chiều tuyến tính 4/3
Chức năng của van tuyến tính
- Van tuyến tính dùng ể thiết lập vòng iều khiển áp suất -
Một số ặc iểm của van tuyến tính + Kết nối thủy lực A, B: + Hai ngõ làm việc P: lOMoARcPSD| 37054152 + Nguồn cấp T:
Ngõ xả Đường tín hiệu Dòng chảy P⟶A và B⟶T
Vị trí giữa là vị trí óng Dòng chảy P⟶B và A⟶T
4.2.3. Kết nối iện Nguồn cấp Điện áp iều khiển Đường tín hiệu 24V +10V Dòng chảy P⟶A và B⟶T 0V Vị trí giữa -10V Dòng chảy P⟶B và A⟶T
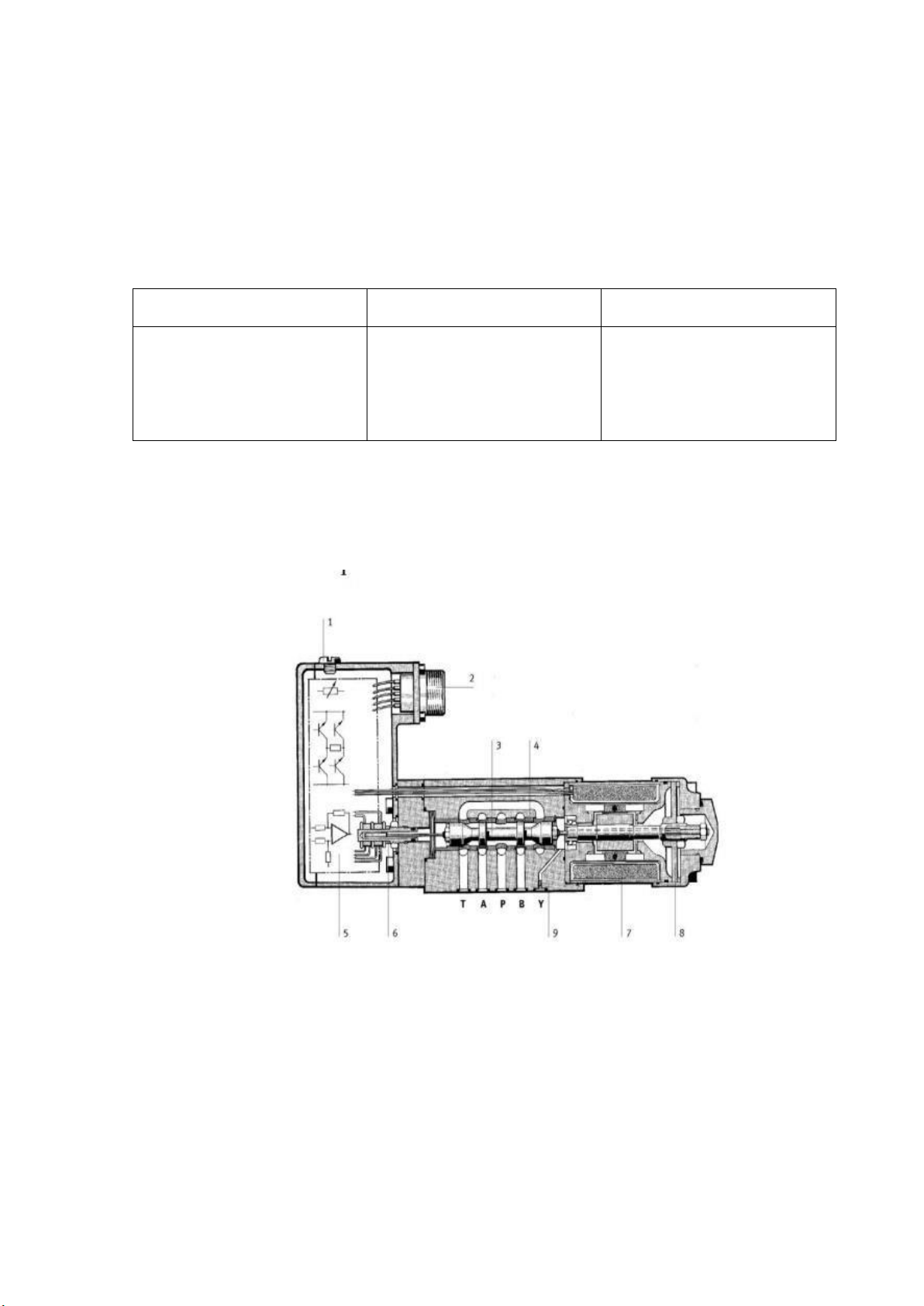
Hình 4.6: Cấu tạo van tuyến tính 4/3 *Kết cấu van
Các thành phần chính của van bao gồm : 1 vít lOMoARcPSD| 37054152 2 ầu nối 3 nòng van 4 các vòng ệm 5 bo mạch tổ hợp 6 cảm biến vị trí 7 ộng cơ tuyến tính 8 lò xo phản hồi 9 nắp chặn
* Nguyên lý hoạt ông của van
Tín hiệu iều khiển thông qua ầu nối (2) dẫn vào mạch tổ hợp (5) iều khiển ộng cơ tuyến
tính (7) theo phương pháp ộ rộng xung (PWM). Cảm biến vi trí nòng van là loại biến áp
xoay chiều tuyến tính vi sai (LVDT- Linear Variable Differential Transformer). Tín hiệu
ra của cảm biến ược chỉnh bằng bộ Demodulator, ưa về bộ iều khiển vi trí ( bộ này ươc
tổ hợp ngay trong bo mạch của van tuyến tính ) và so với giá trị ặt. Giá trị ặt ở ây là giá
trị iện áp iều khiển i vào van. Bộ iều khiển vi trí của van sẽ kích hoạt mô tơ tuyến tính
cho ến khi giá tri thực tế bằng giá trị ặt. kết quả là vi trí của piston sẽ tỉ lệ với hiệu iện
áp ưa vào. Tuy nhiên lưu lượng thực tế q không chỉ phụ thuộc vào tín hiệu iện áp iều
khiển mà còn phụ thuộc vào giá trị Dp tại các mép ều khiển của van. lOMoARcPSD| 37054152
Hình 4.7: Động cơ tuyến tính
*Kết cấu ộng cơ tuyến tính Các bộ phận chính gồm : 1 lỗ xuyên cáp 2 các nam châm vĩnh cửu 3 lò xo iều chỉnh 4 vòng bi 5 các cuộn dây 6 phần ứng 7 nắp ậy kiểu ren vít
*Nguyên lý hoạt ộng của ộng cơ tuyến tính
Động cơ tuyến tính dùng trong van thực chất là một loại solenoid hoạt ộng theo nguyên tắc vi sai.
Từ trường ược cung cấp nhờ nam châm vĩnh cửu ược lắp ặt sẵn. Khi không có tín hiệu
dòng iện i vào các cuộn dây, các lực từ cân bằng và lò xo iều chỉnh (3) sẽ giữ phần ứng
ở vị trí cân bằng (vị trí trung gian, hay vị trí 0). Khi có dòng iện ưa vào các cuộn dây các
lực từ không còn cân bằng nên hình thành lực tác ộng làm dịch chuyển phần ứng (do ó lOMoARcPSD| 37054152
cũng làm dịch chuyển nòng van) theo một hướng nhất ịnh tùy theo sự phân cực của dòng
iện vào. Lượng dịch chuyển của phần ứng tỉ lệ với giá trị dòng iện ưa vào các cuộn dây.
*Các ặc tính tĩnh của van
Đường ặc tính lưu lượng - iện áp iều khiển:
Hình 4.8: Đường ặc tính lưu lượng - iện áp iều khiển
Đường ặc tính áp suất – iện áp iều khiển: lOMoARcPSD| 37054152
Hình 4.9: Đường ặc tính áp suất – iện áp iều khiển
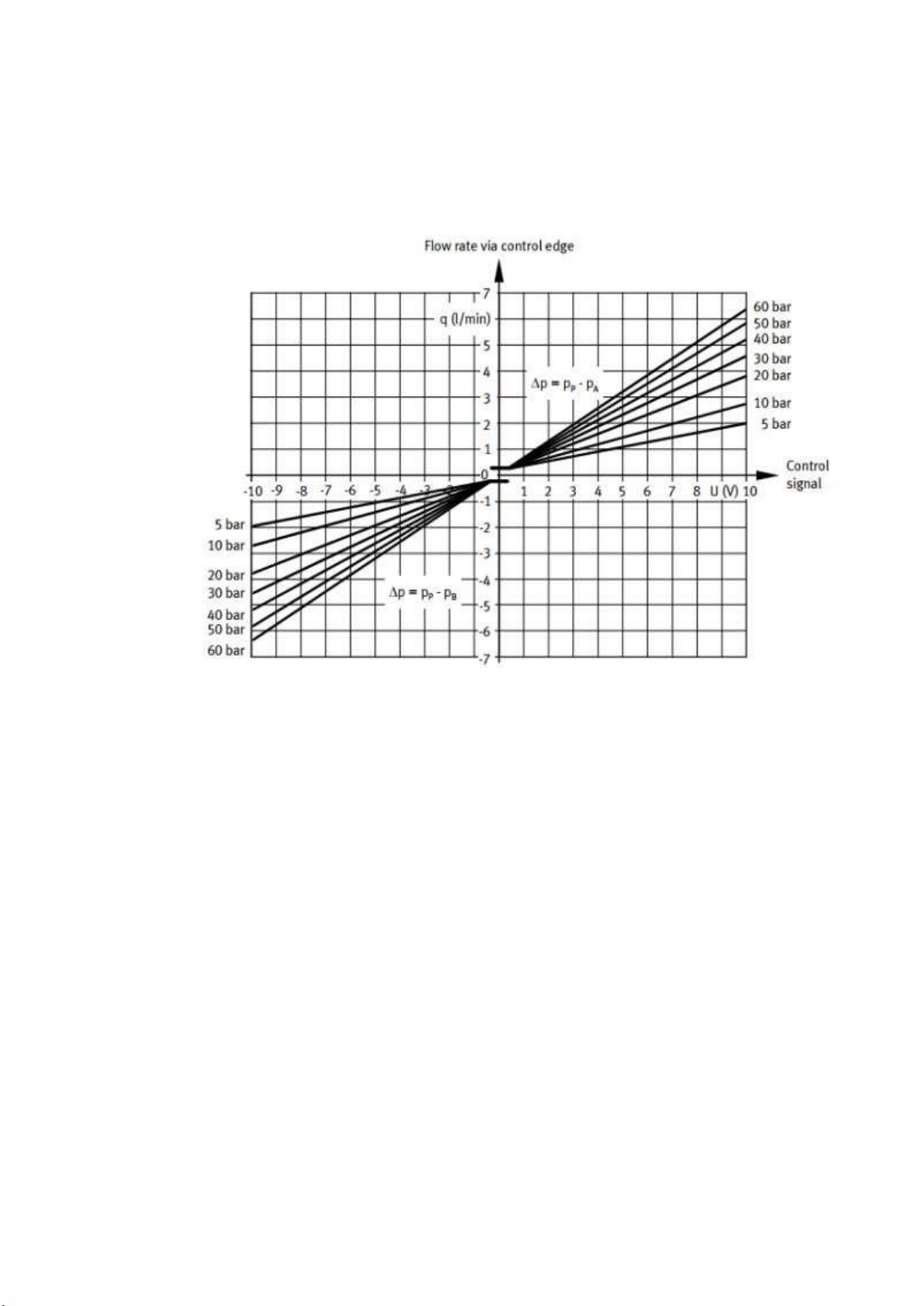
Đường ặc tính lưu lượng - áp suất:
Hình 4.10: Đường ặc tính lưu lượng - áp suất
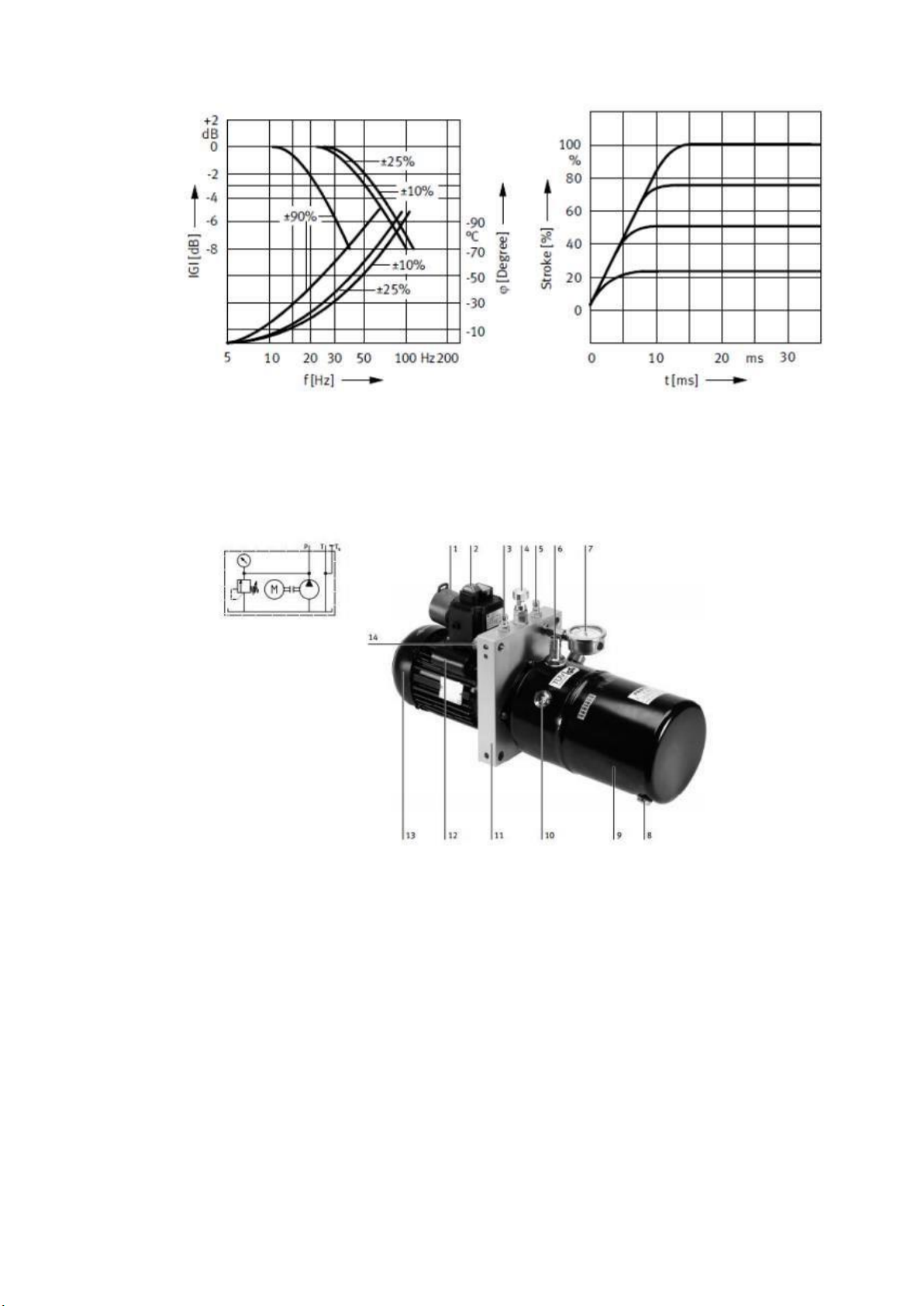
Các ặc tính ộng của van: lOMoARcPSD| 37054152
Hình 4.11: Các ặc tính ộng của van
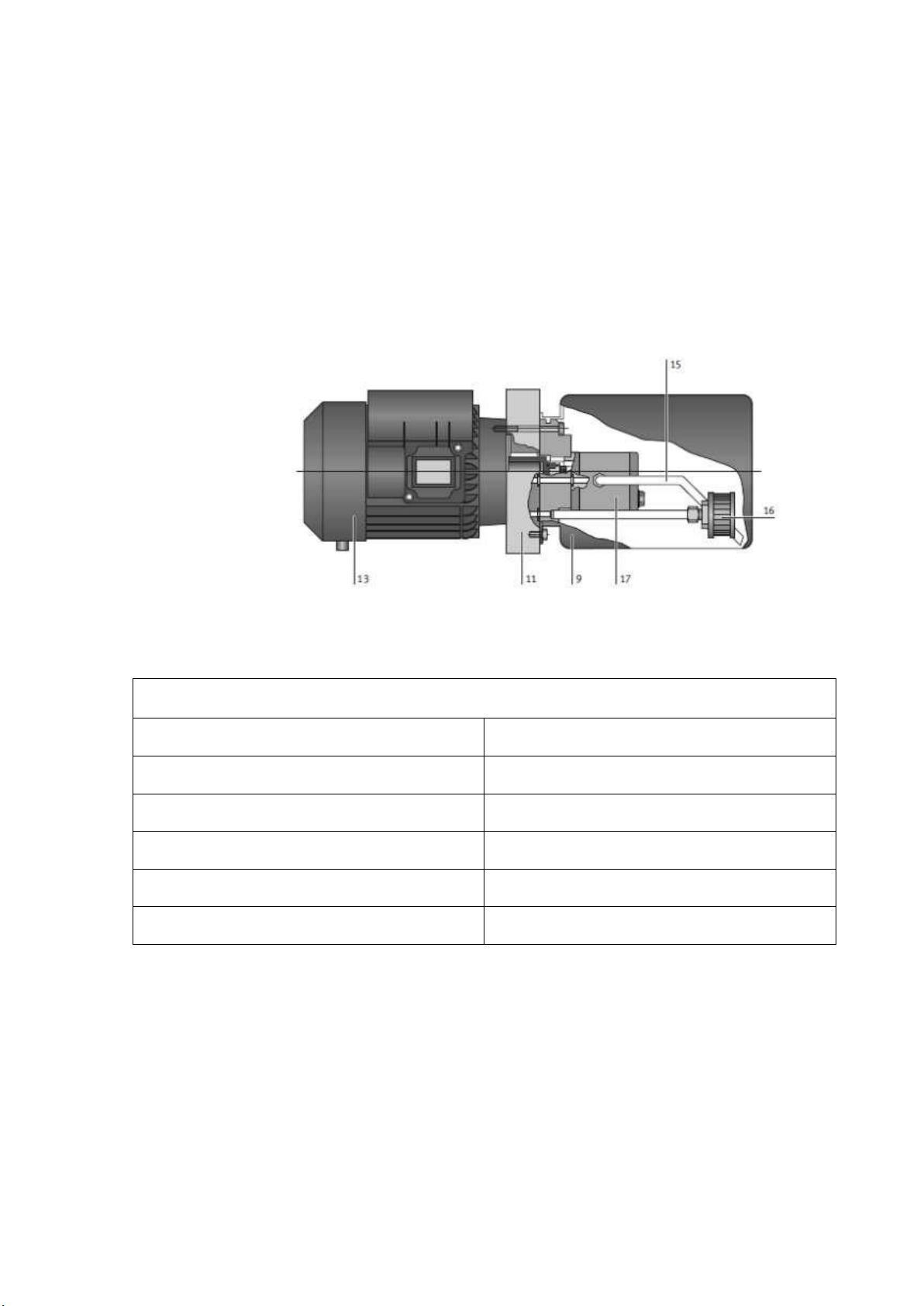
4.2.3. Máy bơm thủy lực
Hình 4.12: Hình ảnh và ký hiệu của máy bơm thủy lực Cấu tạo: 1 Dây nguồn 2 ON / OFF, 3 Kết nối bồn T 4 Van giảm áp 5 Kết nối áp suất P
6 Kết nối bể (màu xanh) lOMoARcPSD| 37054152 7 Đồng hồ o áp suất 8 Chốt thoát dầu 9 Bồn chứa
10 Chỉ báo mức thủy lực có trong bồn 11 Mặt bích 12 Tụ iện 13 Động cơ iện
Bảng 4.5: Thông số kỹ thuật của máy thủy lực
Thông số kỹ thuật Điện áp danh ịnh: 230 V AC Công suất: 0,65 W Tần số: 50-60 Hz Lưu lượng: 2,2-2,7 l/phút Kích thước: 580 x 300 x 180 mm Trọng lượng: 19 kg
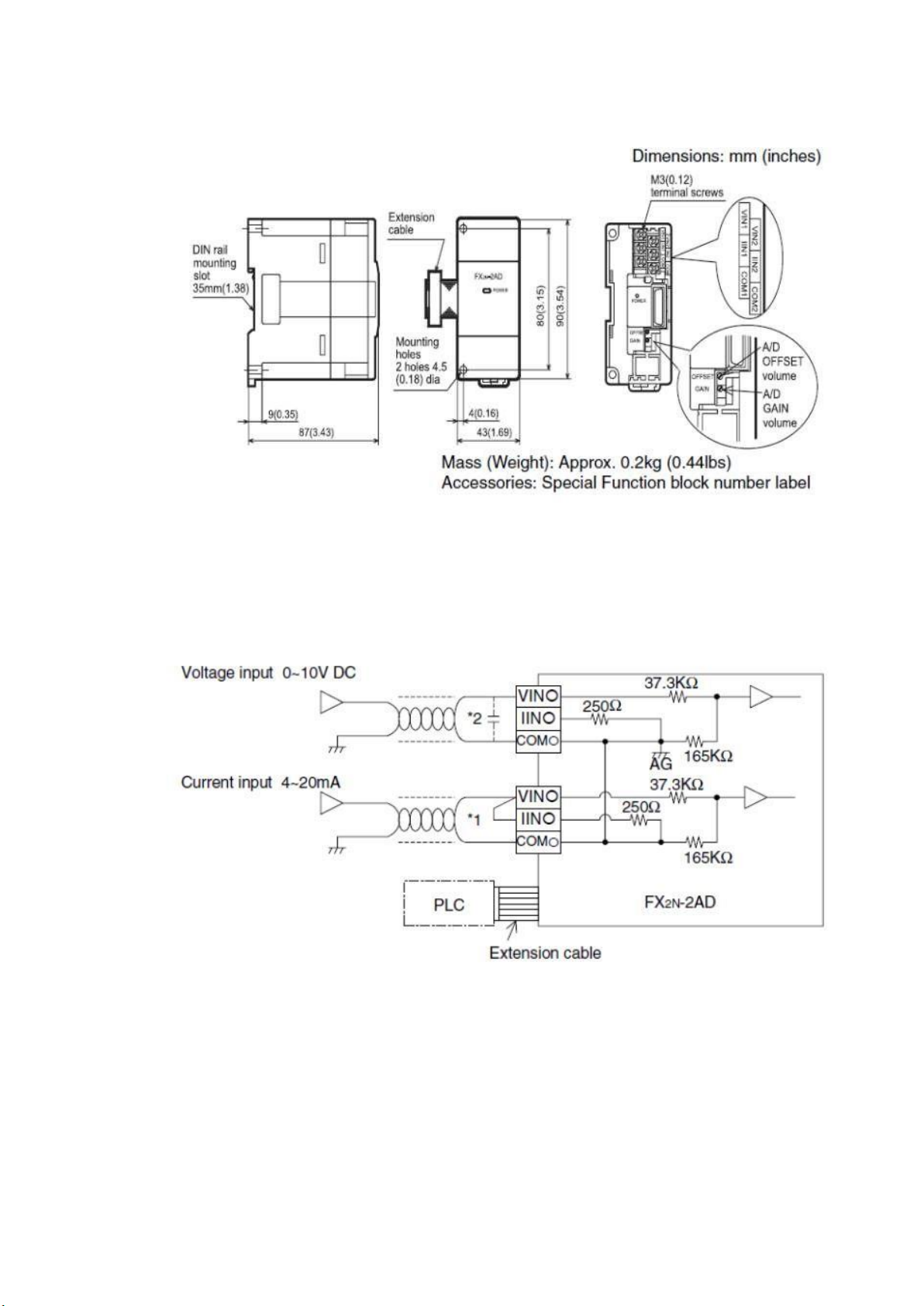
4.3. MODULE MỞ RỘNG PLC FX2N-2AD MITSUBISHI 4.3.1. Giới thiệu
- FX2N-2AD ược sử dụng ể chuyển ổi ầu vào tương tự của hai iểm ( ầu vào iện áp và
dòng iện) thành giá trị kỹ thuật số 12 bit và ể chuyển tiếp các giá trị tới PLC. FX2N
2AD có thể kết nối với dòng FX0N, FX1N, FX2N, FX3G, FX3GC, FX3U và FX3UC.
- Đầu vào tương tự ược chọn từ ầu vào iện áp hoặc dòng iện bằng phương pháp kết nối dây. lOMoARcPSD| 37054152
- Có thể iều chỉnh các ặc tính chuyển ổi tương tự sang số.
- PLC sê-ri FX3U/FX3UC có thể sử dụng ặc iểm kỹ thuật trực tiếp của bộ nhớ ệm.
Hình 4.13: Kích thước bên ngoài và các bộ phận của FX2N-2AD
4.3.2. Kết nối phần cứng Nối dây FX2N-2AD
Hình 4.14: Đấu dây FX2N-2AD lOMoARcPSD| 37054152
4.3.3. Xác ịnh Gain và offset
4.3.4. Phân bổ bộ nhớ ệm (BFM)
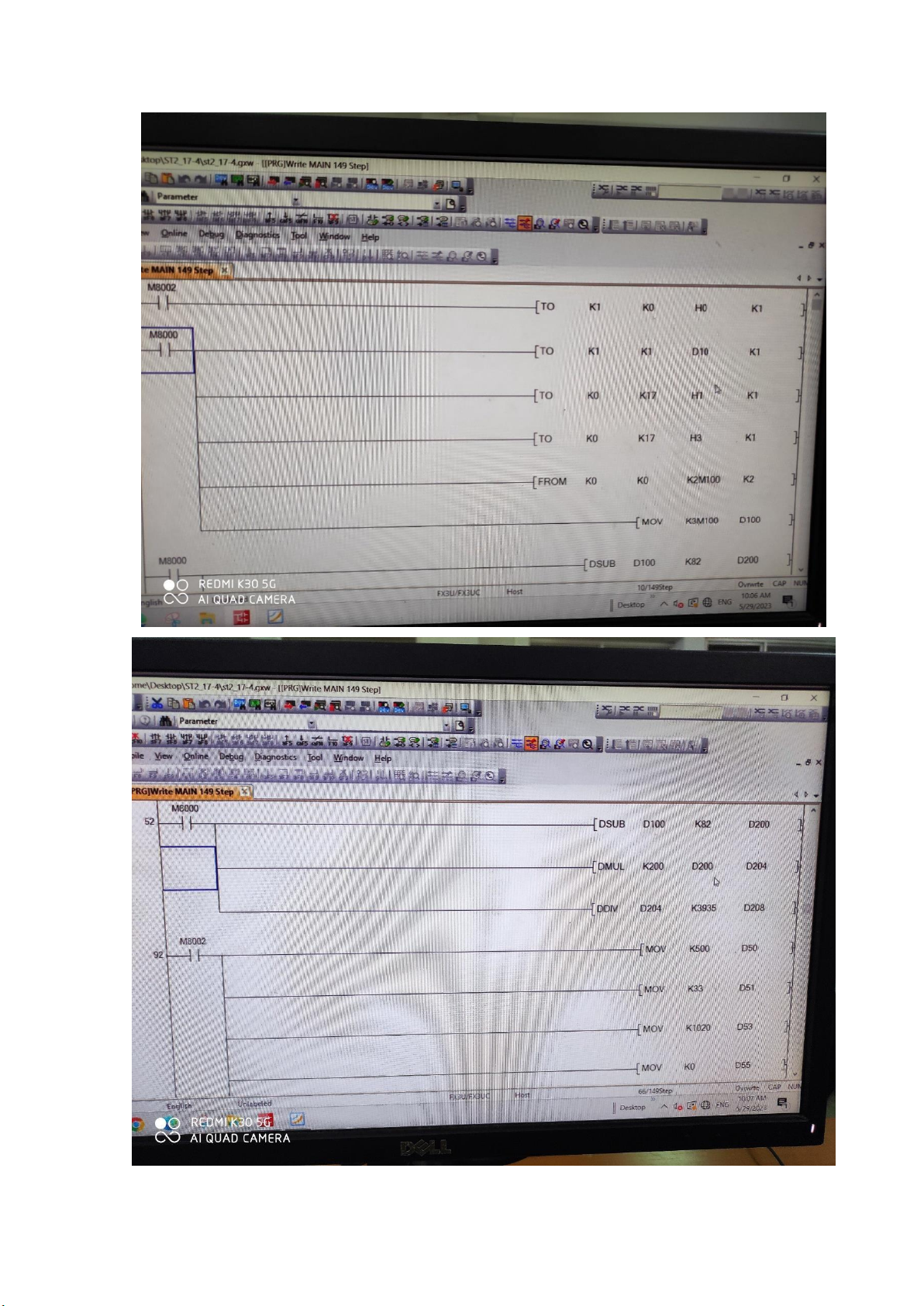
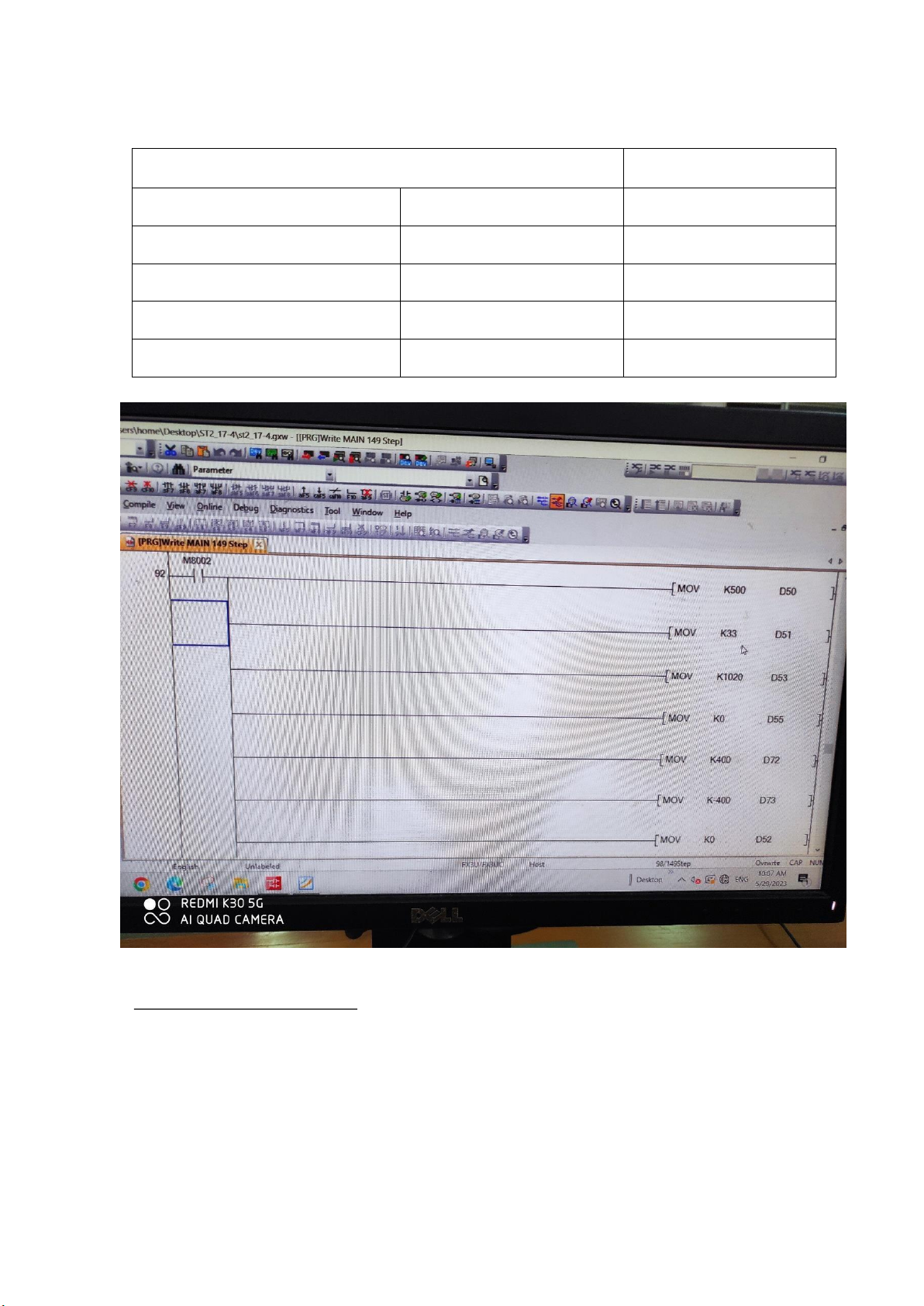
4.3.5. Lập trình tín hiệu analog
* Đọc tín hiệu analog từ kênh 2
Thông thường, các giá trị ọc trực tiếp từ ầu vào tương tự không ổn ịnh.
Do ó, nhóm ã sử dụng dữ liệu giá trị trung bình ể thay thế. lOMoARcPSD| 37054152 lOMoARcPSD| 37054152
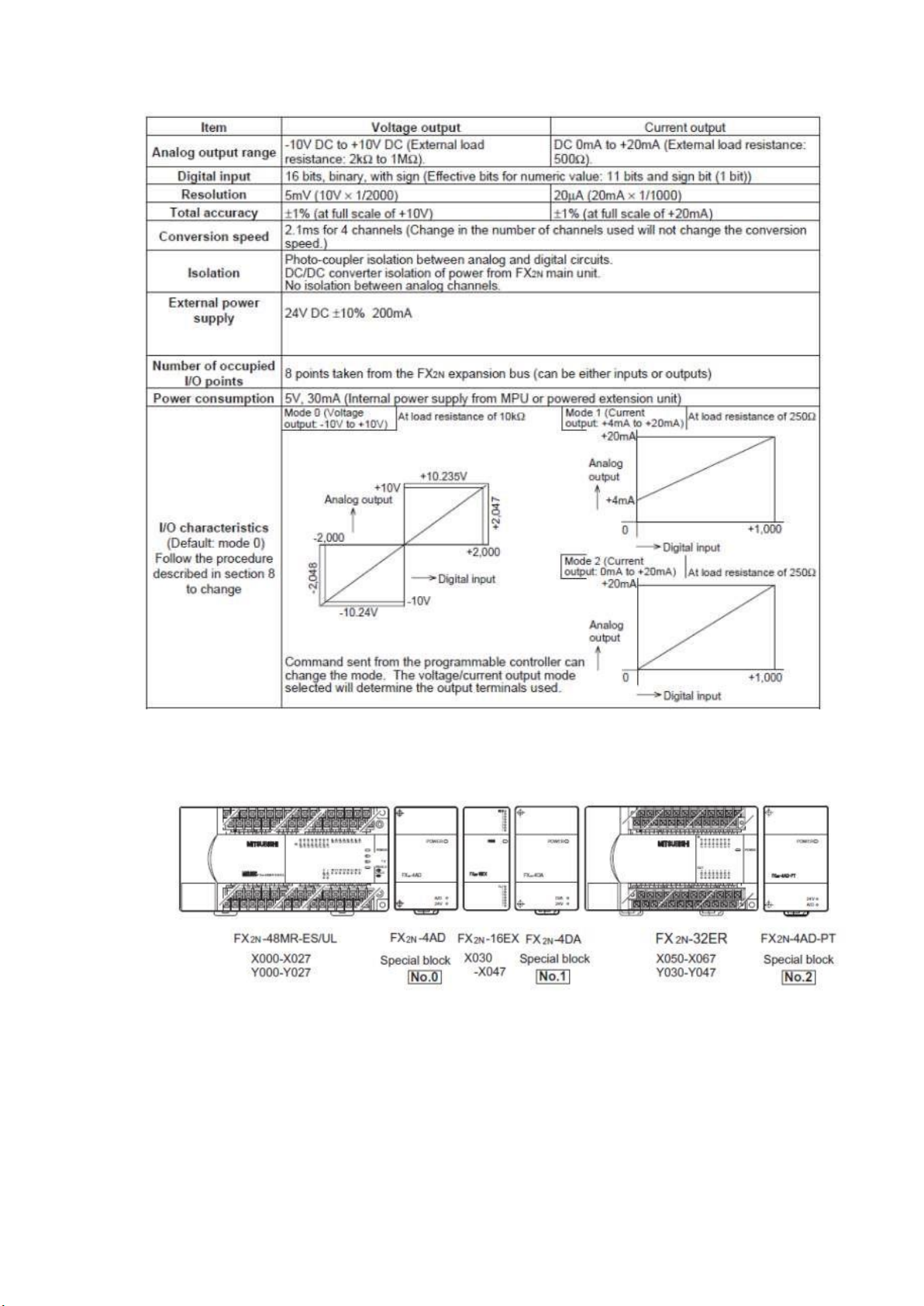
4.4. MODULE ANALOG OUTPUT MODULE FX2N-4DA 4.4.1. Giới thiệu
Khối chức năng ặc biệt tương tự FX2N-4DA có 4 kênh ầu ra. Nó có ộ phân giải tối a là 12 bit.
- Việc lựa chọn ầu vào/ ầu ra dựa trên iện áp hoặc dòng iện là do người sử dụng ấu
dây. Dải tương tự từ -10 ến 10V DC ( ộ phân giải: 5mV) và/hoặc 0 ến 20mA ( ộ phân giải:
20mA) có thể ược chọn ộc lập cho từng kênh.
- Truyền dữ liệu giữa FX2N-4DA và thiết bị chính (PLC) bằng cách trao ổi bộ nhớ
ệm. Có 32 bộ nhớ ệm (mỗi bộ nhớ ệm 16 bit) trong FX2N 4DA. 105
- FX2N-4DA chiếm 8 iểm I/O trên bus mở rộng FX2N. 8 iểm có thể ược phân bổ
từ ầu vào hoặc ầu ra. FX2N-4DA lấy 30mA từ ường ray 5V của thiết bị chính
FX2N hoặc thiết bị mở rộng ược cấp nguồn lOMoARcPSD| 37054152
Hình 4.15: Kích thước bên ngoài và các bộ phận của FX2N-4DA
4.4.2. Kết nối phần cứng
Hình 4.16: Đấu nối FX2N-4DA
4.4.3. Thông số kỹ thuật lOMoARcPSD| 37054152
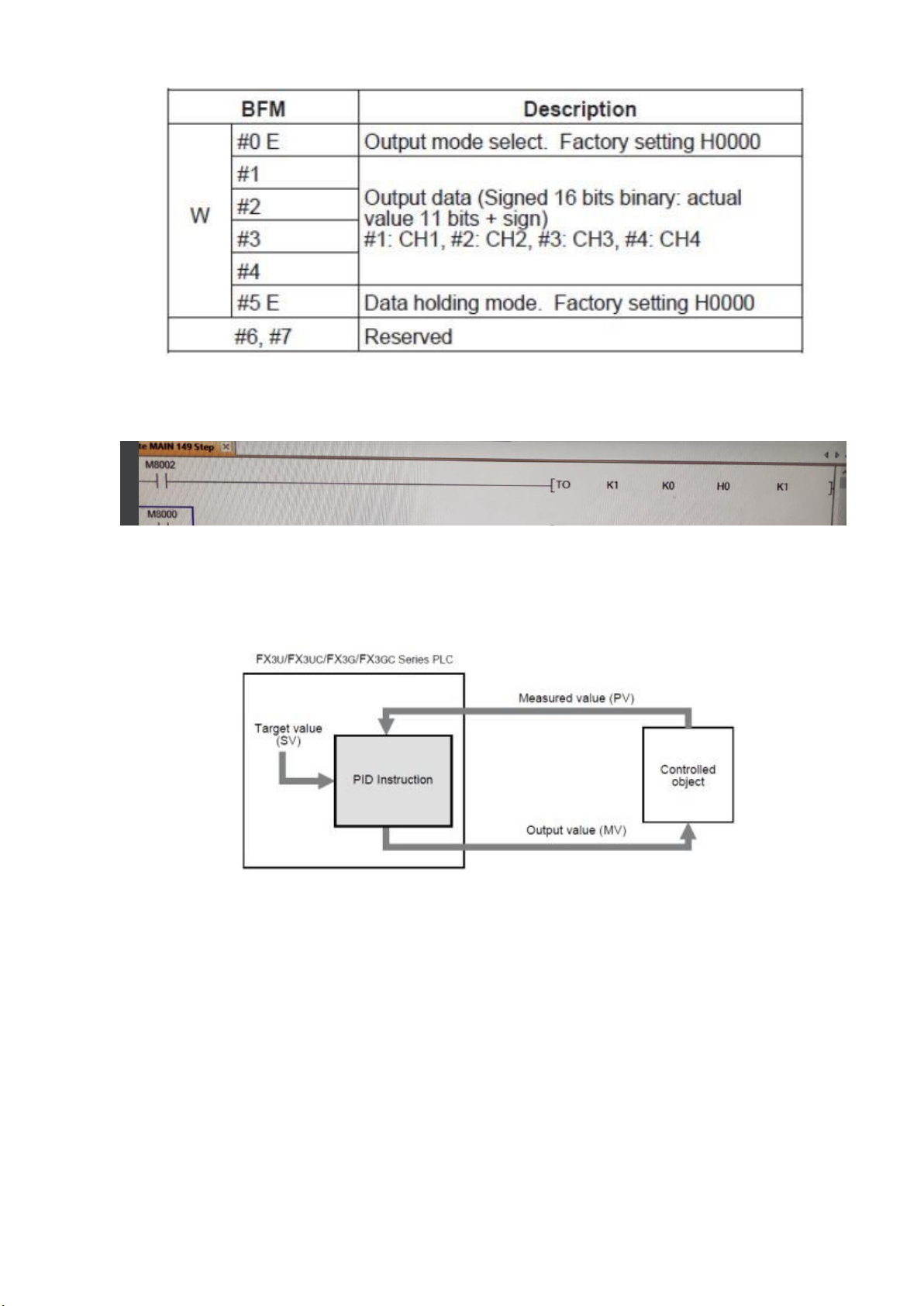
4.4.4. Phân bổ bộ nhớ ệm (BFM)
* Chương trình
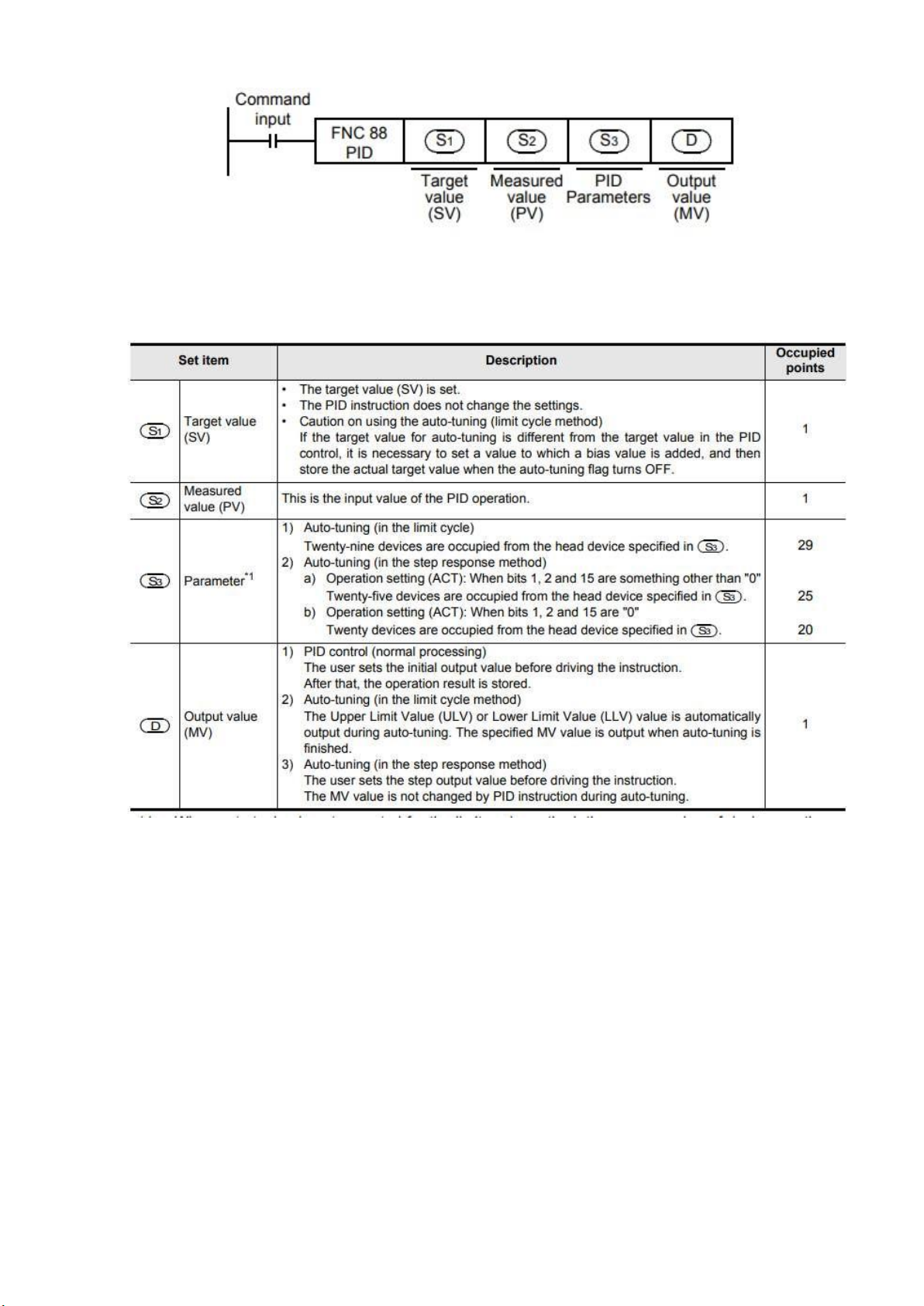
4.5. CẤU TRÚC ĐIỀU KHIỂN PID (PNC88)
4.5.1. Giới thiệu
Hình 4.17: Sơ ồ hoạt ộng của cấu trúc iều khiển PID
*Hoạt ộng PID 16 bit
Khi giá trị mục tiêu (S1), giá trị o ược (S2) các tham số PID (S3) thành (S3) + 6 ược ặt
và chương trình ược thực thi, kết quả hoạt ộng (MV) ược chuyển thành giá trị ầu ra (D)
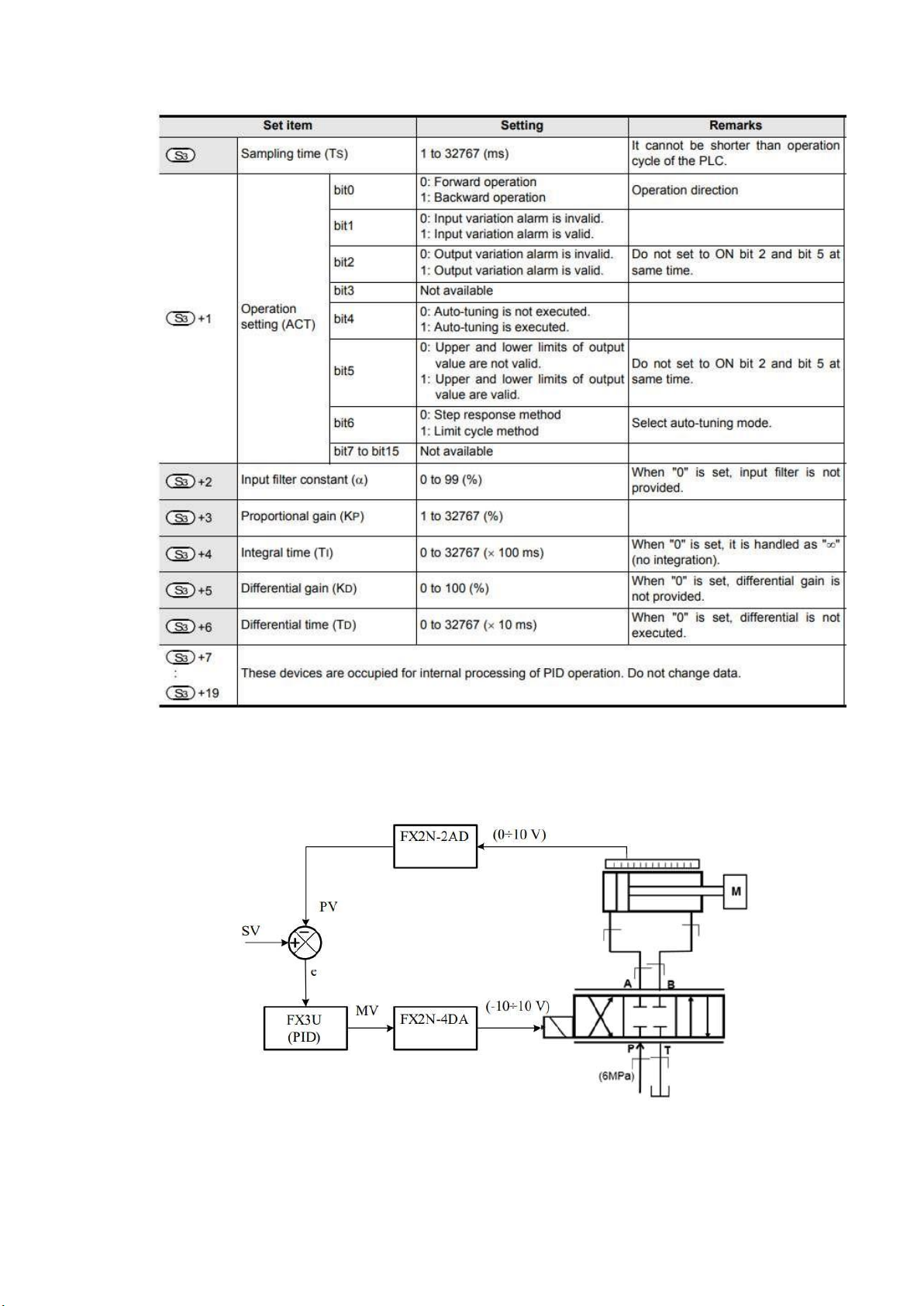
tại mọi thời iểm lấy mẫu. Thời gian lấy mẫu ược chỉ ịnh bởi (S3) lOMoARcPSD| 37054152 4.5.2. Thông số lOMoARcPSD| 37054152 4.6. THỰC NGHIỆM
4.6.1. Mô hình iều khiển
4.6.2. Cài ặt vận hành
Lệnh tiến S3+1 bit 0 = 0 lOMoARcPSD| 37054152
Lệnh lùi S3+1 bit 0 = 1
Giới hạn trên và dưới cho giá trị ầu ra S3 +1 bit 5 = 1 (ON)
Khâu tỉ lệ (Kp): S3+3 (setting range: 1 – 32767)
Khâu tích phân (Ti) S3+4 (0 – 32767) × 100 (ms) (“0” is considered as ∞, no integral)
Khâu ạo hàm(Td) S3+6 (0 – 32767) × 10 (ms)
4.6.3. Tự ộng iều chỉnh
Phần này mô tả chức năng tự ộng iều chỉnh của lệnh PID. Chức năng tự ộng iều chỉnh
sẽ tự ộng thiết lập các hằng số quan trọng, chẳng hạn như hệ số khuếch ại tỷ lệ (Kp)và lOMoARcPSD| 37054152
thời gian tích phân(Ti), ể ảm bảo iều khiển PID tối ưu. Có hai phương pháp tự ộng iều
chỉnh: phương pháp chu kỳ giới hạn và phương pháp áp ứng từng bước.
Các thông số sau ây sẽ ược ặt sau chế ộ tự ộng iều chỉnh: THAM SỐ
VỊ TRÍ ĐƯỢC CÀI ĐẶT GIÁ TRỊ KP S3+3 TI S3+4 TD S3+5
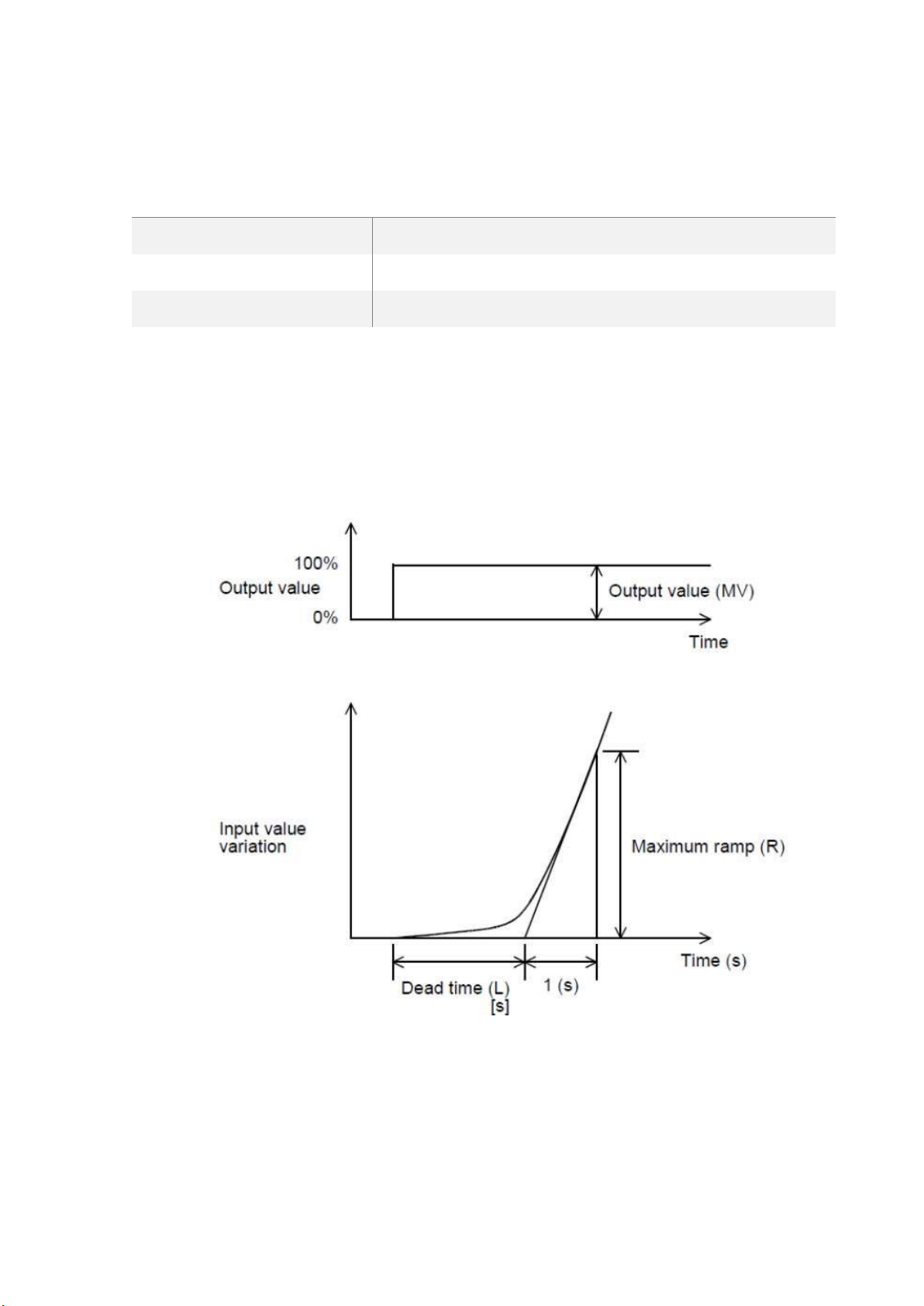
Phương pháp áp ứng từng bước
Trong phương pháp này, bằng cách cung cấp ầu ra theo từng bước từ 0 ến 100% (0 ến
75% hoặc 0 ến 50%) cho hệ thống iều khiển, ba hằng số trong iều khiển PID thu ược
từ các ặc tính vận hành ( oạn dốc tối a (R) và thời gian chết (L)) và biến thể giá trị ầu vào. Quy trình
1 Chuyển giá trị ầu ra ể tự ộng iều chỉnh sang giá trị ầu ra (D)
2 Cài ặt thông số (S3), giá trị mục tiêu (SV), v.v. không thể cài ặt trong auto tuning theo hệ thống lOMoARcPSD| 37054152 *Cài ặt giá trị Set item and parameter Value Target value (SV) S1 Sampling time (TS) S3 Input filter (α) S3+2 Differential gain (KD) S3+5 Other
*Chương trình thiết lập thông số PID
Tài liệu liên quan:
-

Matlab Simulation of DC Servo Motors for Control Systems | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
141 71 -

Hydraulic Servo System Overview with Mitsubishi Modules | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
126 63 -

Test 1: Servo Motor Control Loops & Feedback Strategies | Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
106 53 -
Đề thi cuối học kì 1 năm học 23-24 Môn Mechatronic Servo System Control | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
135 68 -

Trạm AC servo và hydralic servo system | Báo cáo thực tập Môn Mechatronic Servo System Control - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
129 65