Báo cáo Tổng kết dự án bãi đỗ xe tự động môn Nhập môn Điện tử - Viễn thông | Trường Đại học Bách Khoa Hà Nội
Hiện nay chúng ta đang bước vào thời đại công nghệ 4.0, xã hội cũng từ đó mà ngày càng phát triển mạnh mẽ để phù hợp với xu thế hiện nay. Điều đó, có một phần không nhỏ nhờ vào Công Nghệ thông tin. Hơn thế nữa, mật độ dân số tại các thành phố lớn cũng vì sự phát triển đó mà ngày càng tăng, chính vì vậy mà các phương tiện đi lại ngày càng nhiều. Tài liệu được sưu tầm gồm 15 trang, giúp các bạn nắm vững kiến thức, rèn luyện kỹ năng và đạt được kết quả tốt trong học tập. Mời các bạn đón xem!
Môn: Nhập môn Điện tử - Viễn thông 12 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.5 K tài liệu
Tác giả:





Preview text:
BÁO CÁO NHẬP MÔN HỌC
NHẬP MÔN ĐIỆN TỬ - VIỄN THÔNG
[Bãi đỗ xe thông minh tự động]
Nhóm thực hiện: GROUP 06 – Friendship Thành viên nhóm: 1 Kong SovanNen 20239697 2 Nguyễn Ngọc Sáng 20233615 3 Phan Đình Nam 20233550 4 Trịnh Đức Anh 20233263 5 Vũ Huy Học 20233418
Giảng viên hướng dẫn: Nguyễn Tiến Dũng Hà Nội, 2023 MỤC LỤC
MỤC LỤC SƠ ĐỒ........................................................................................................1
LỜI MỞ ĐẦU...............................................................................................................2
PHẦN 1: GIỚI THIỆU KHÁI QUÁT VỀ DỰ ÁN.......................................................3 1.1.
Giới thiệu khái quát về dự án................................................................3 1.2.
Mục tiêu...............................................................................................3
PHẦN 2: LẬP KẾ HOẠCH..........................................................................................4 2.1.
Bảng nhiệm vụ.....................................................................................4 2.2.
Bảng kế hoạch......................................................................................4
PHẦN 3: NỘI DUNG CHI TIẾT DỰ ÁN.....................................................................5 3.1.
Thiết kế hệ thống tự động barrie...........................................................5 3.1.1.
Thiết kế phần cứng.......................................................................5 3.1.2.
Yêu cầu kĩ thuật............................................................................6 3.1.3.
Nguyên lý hoạt động.....................................................................6 3.2.
Cảm biến thông minh tìm chỗ trống.....................................................7 3.2.1.
Thiết kế phần cứng.......................................................................7 3.2.2.
Yêu cầu kĩ thuật............................................................................8 3.2.3.
Nguyên lý hoạt động.....................................................................8 3.3.
Thông số kĩ thuật..................................................................................9 3.3.1.
Arduino UNO R3..........................................................................9 3.3.2.
RFID NFC 13.56MHz RC522......................................................9 3.3.3.
Động cơ servo SG90 180 độ.......................................................10 3.3.4.
LCD I2C.....................................................................................11 3.2.5.
Cảm biến hồng ngoại IR.............................................................12 3.4.
Hạn chế...............................................................................................13
KẾT LUẬN.................................................................................................................13
MỤC LỤC SƠ ĐỒSơ đồ 1: Mạch lắp của Hệ thống tự động barrie ............ Error! Bookmark not defined.
Sơ đồ 2: Sơ đồ nguyên lý hoạt động của bãi dỗ xe tưu động ......................................... 7
Sơ đồ 3: Mạch cảm biến phát hiện chỗ trống ................................................................. 8 LỜI MỞ ĐẦU
Hiện nay với xu thế hội nhập thế giới, ngành điện từ cũng từ đó mà càng phát
triển lớn mạnh hơn, kéo theo cùng là những sản phẩm điện từ ngày cảng phổ biến.
Kết hợp với sự phát triển mạnh mẽ của vi điều khiển, chỉ cần một tác động chạm nhẹ
cũng đủ làm cho các thiết bị được điều khiển một cách nhanh chóng.
Cùng với đó là nhu cầu của con người ngày càng phát triển và mong muốn
tạo ra những công cụ tiện ích trong đời sống của chính mình. Chính vì vậy, nhóm 06
bọn em đưa đến quyết định làm dự án “Thiết kế bãi đỗ xe tự động” để con người có
thể tiết kiệm được nhiều thời gian cho bản thân hơn thay vì phải tìm cách và mất thì
giờ đỗ xe khi di chuyển trong công việc cũng như đời sống.
Trong quá trình thực hiện dự tài này, chúng em đã dành rất nhiều tâm huyết,
cố gắng, thấu hiểu để hoàn thành tốt dự án này. Tuy nhiên còn một số sai sót nhất
định còn xảy ra do vốn kiến thức của chúng em còn non nớt, hạn hẹp cũng như
những yếu tố khách quan khác. Chúng em rất mong sự đóng góp ý kiến, phê bình và
hướng dẫn thêm của thầy Nguyễn Tiến Dũng cũng như bạn đọc.
Chúng em xin chân thành cảm ơn!
PHẦN 1: GIỚI THIỆU KHÁI QUÁT VỀ DỰ ÁN
1.1. Giới thiệu khái quát về dự án
Hiện nay chúng ta đang bước vào thời đại công nghệ 4.0, xã hội cũng từ đó
mà ngày càng phát triển mạnh mẽ để phù hợp với xu thế hiện nay. Điều đó, có một
phần không nhỏ nhờ vào Công Nghệ thông tin. Hơn thế nữa, mật độ dân số tại các
thành phố lớn cũng vì sự phát triển đó mà ngày càng tăng, chính vì vậy mà các
phương tiện đi lại ngày càng nhiều. Cùng với đó, tại nơi làm việc, trường học hay
các khu mua sắm… lại là những nơi có mật độ phương tiện đi lại đông đúc, ở những
nơi này không thể thiếu những bãi gửi xe ra – vào. Ngoài ra, xe cộ cũng chính là một
trong những phương tiện thiết yếu để phục vụ cho việc đi làm, đi chơi hay kinh doanh….
Vì vậy, nhu cầu sử dụng xe càng nhiều thì số lượng xe cộ càng lớn. Thấy rõ
được thực trạng đang diễn ra hiện nay, tại các thành phố, khu đô thị lớn đã xuất hiện
không ít các bãi đỗ xe tự động được triển khai xây dựng. Tuy nhiên để có thể kiểm
soát được hoạt động của loại hình bãi đỗ xe này cần có một phần mềm quản lý trông
giữ xe thông minh phù hợp và tiên tiến. Đây đang và sẽ tiếp tục được xem là giải
pháp hữu hiệu, mang lại hiệu quả cao nhất phù hợp cho xã hội hiện nay. 1.2. Mục tiêu
Mục tiêu dự án là mang đến cho khách hàng giải pháp phù hợp nhất, tiện lợi
nhất, tiết kiệm không gian và giảm thiểu chi phí với cách quản lý của các bãi xe tại
Việt Nam, nhằm nâng cao hiệu quả và mức độ tin cậy của các bãi đỗ xe hiện nay.
Ngoài ra cũng để tránh lãng phí thời gian chờ đợi của khách hàng nên ưu tiên phát
triển phần mềm quản lý và ngày càng tối ưu trong việc lựa chọn và lắp đặt các thiết bị công nghệ.
Quản lý hệ thống bãi giữ xe thông minh nhằm tự động hóa việc quản lý gửi
và lấy xe, tạo thuận lợi cho người gửi xe cũng như người giữ xe.
PHẦN 2: LẬP KẾ HOẠCH
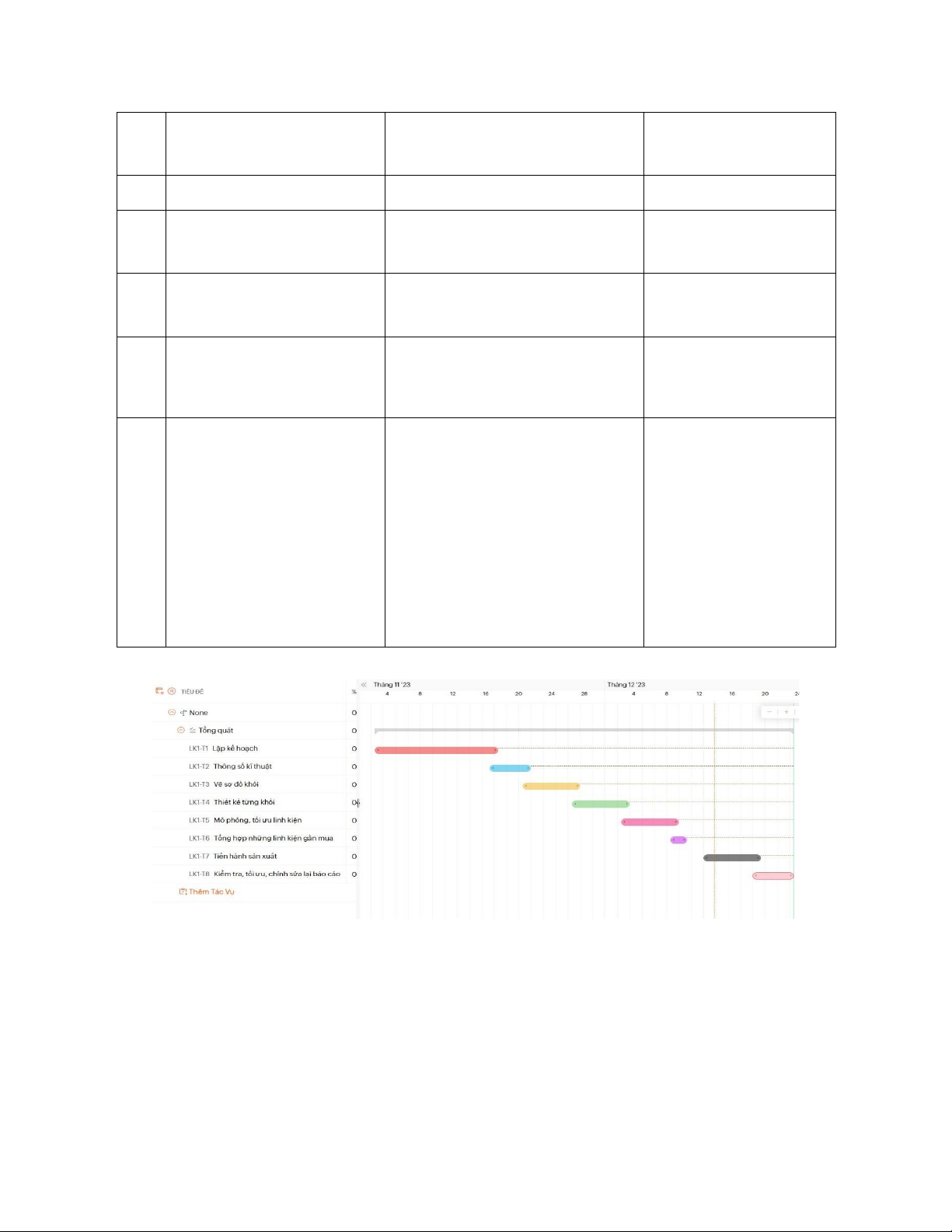
Vì chúng ta chỉ có thời gian 1 tháng để làm, nên cần một bản kế hoạch để chắc chắn
mọi việc hoạt động trơn chu và đúng thời gian Chúng ta có bảng nhiệm vụ và kế hoạch 2.
2.1. Bảng nhiệm vụ
STT Tên nhiệm vụ Khoảng thời gian Nguồn sử dụng 1 Tạo thông số kĩ thuật 2 tuần Microsoft word 2 Xây dựng kế hoạch 5 ngày Bảng nhiệm vụ Bảng kế hoạch 3 Bảng sơ đồ khối 1 tuần Microsoft vision 4 Thiết kế từng khối, 1 tuần Proteus Tinkercab 5
Tối ưu các lựa chọn linh 2 ngày kiện 6 Kiểm tra lại, mô phỏng 1 tuần Proteus Tinkercab 7 Tiến hành hoạt động 2 tuần IDE + tổng hợp những vật cứng cần mua, đặt hàng +lắp ghép, code…. +test đợt 1 +test đợt 2 +hoàn tất sản phẩm
2.2. Bảng kế hoạch
PHẦN 3: NỘI DUNG CHI TIẾT DỰ ÁN 1. 2. 3.
3.1. Thiết kế hệ thống tự động barrie 3.1.1.
Thiết kế phần cứng o Phần
cứng cần thiết của Hệ thống tự động barrie STT Tên phần cứng Số lượng 1 KIT Arduino UNO R3 CH340G 1 2 LCD1602 Xanh Lá 5V 1 3 Triết áp đơn B10k 1 4
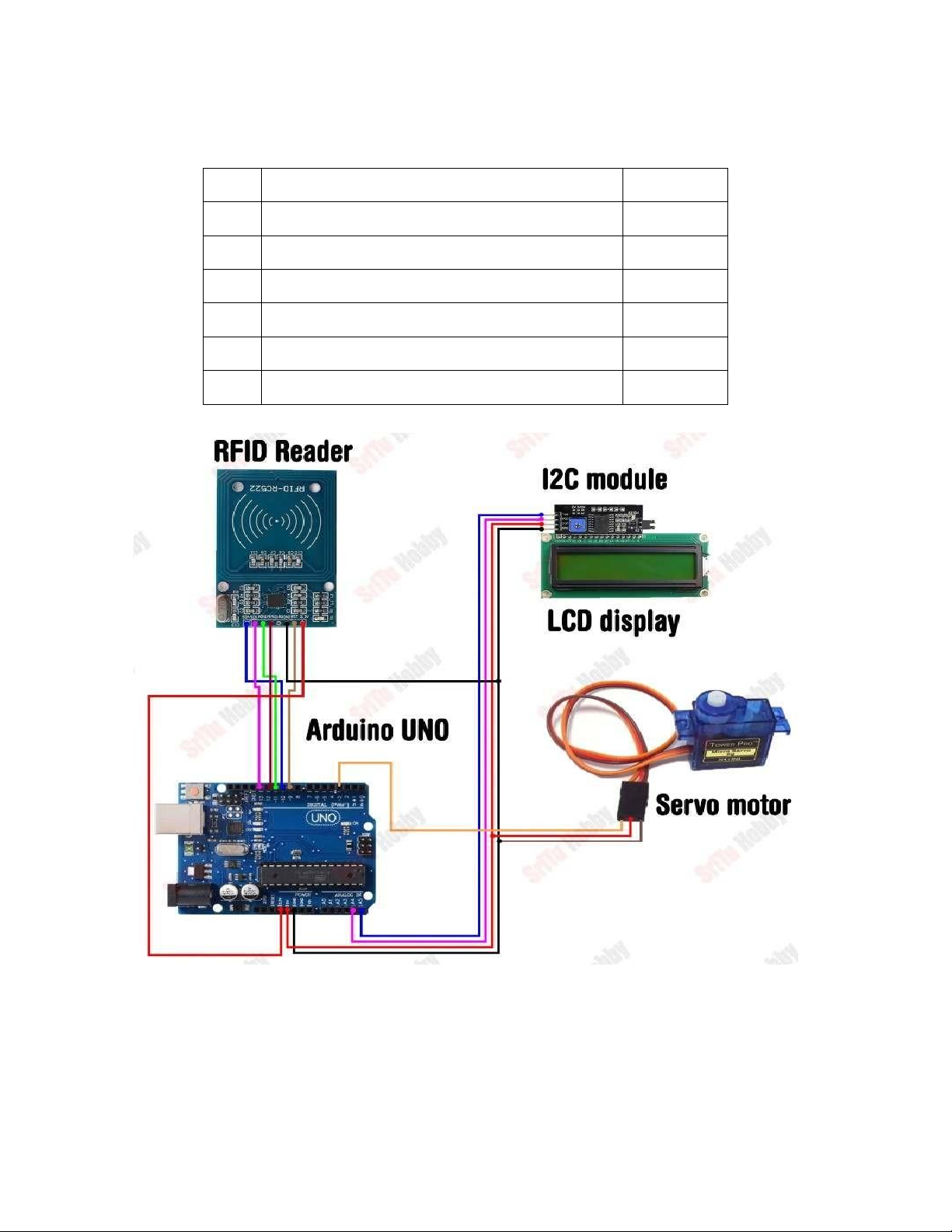
Động cơ Servo SG90 (góc quay 180) 1 5 Module RFID RC522 13.56MHz 1 6 Ardunio LCD Keypad Shield 1 o Mạch lắp
Sơ đồ 1: Mạch lắp của Hệ thống tự động barrie 3.1.2.
Yêu cầu kĩ thuật o Yêu cầu chức năng:
o Khi quẹt thẻ vào RFID từ hệ thống phải nhận diện được thẻ và nâng rào chắn lên.
o Rào chắn có thể nâng lên hạ xuống.
o LCD thể hiện rõ thông tin nếu thẻ đúng thì sẽ thể hiện xe được đi vào,
thẻ sai (thẻ chưa được tích hợp) thì thể hiện xe không được đi vào. o
Có khả năng xử lí dữ liệu thông tịn các xe đi vào, đi ra một cách chuẩn xác.
o Thông tin đưa lên máy chủ đơn giản, dễ hiểu giúp quản lí bãi đỗ xe dễ hơn.
o Yêu cầu phi chức năng:
o Hệ thống có khả năng xử lí được số lượng người dung cần thiết một
cách ổn định mượt mà.
o Hệ thống có thể mở rộng hay thu nhỏ quy mô dễ dàng khi cần thiết. o
Hệ thống có thể đảm bảo tính bảo mật và an toàn cho khách hàng khi gửi xe.
o Có độ bền cao. o Dễ lắp đặt, bảo trì và cập nhật khi cần thiết. o Phương
pháp sử dụng đơn giản, dễ hiểu.
o Phản hồi nhanh, xử lí dữ liệu một cách chính xác. 3.1.3. Nguyên lý hoạt động
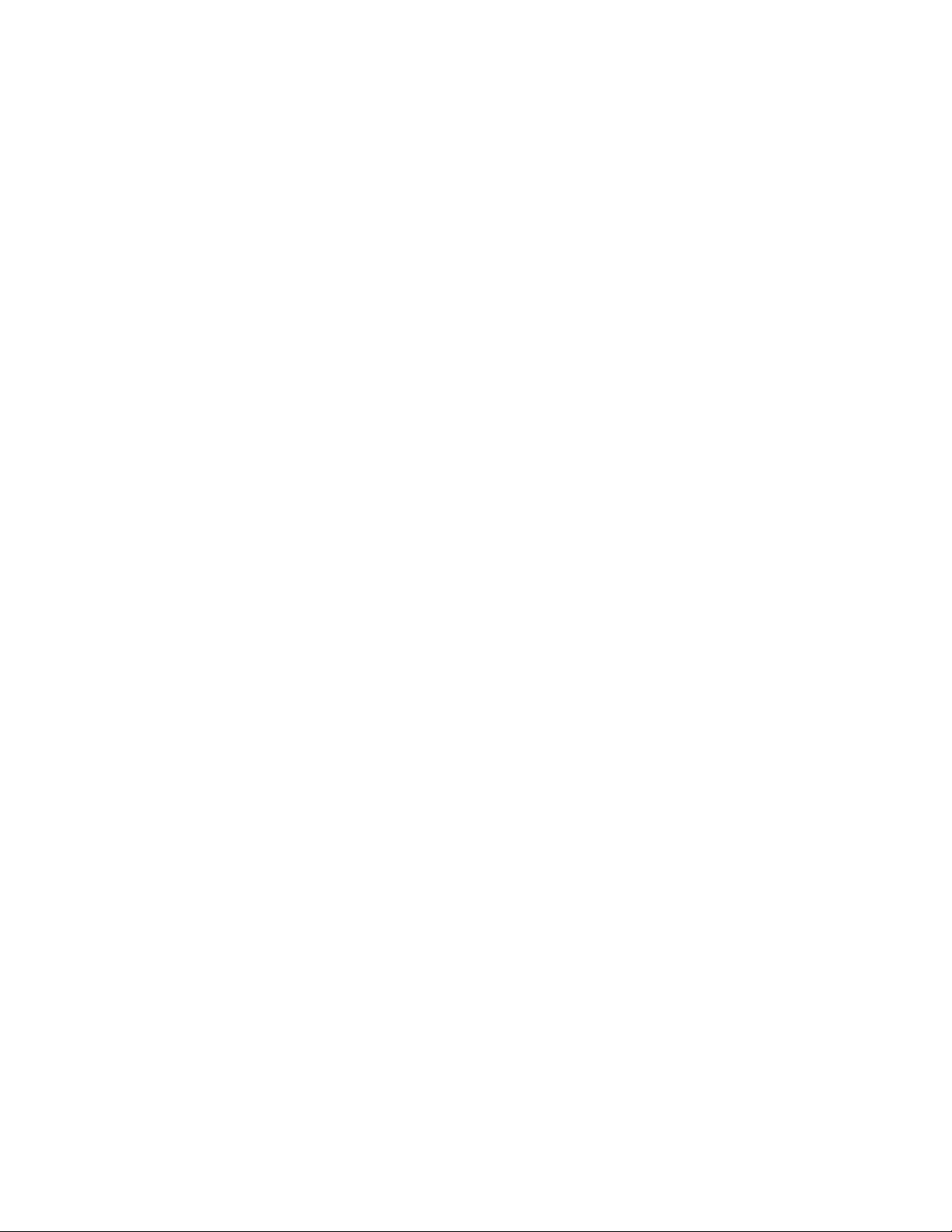
Sơ đồ 2: Sơ đồ nguyên lý hoạt động của bãi dỗ xe tưu động
o Khi chúng ta lái xe đến hệ thống barie, chúng ta sẽ cần 1 thẻ từ để tích hợp với hệ thống.
o Khi thẻ từ tích hợp thành công với hệ thống, bảng LCD sẽ báo hiệu thể hiện
xe được vào, sau đó thanh barie sẽ nâng lên để cho xe đi vô.
o Khi thẻ từ tích hợp không thành công với hệ thống, bảng LCD sẽ báo hiệu thể
hiện lỗi thẻ, thanh barie sẽ không nâng lên để cho xe đi vào.
3.2. Cảm biến thông minh tìm chỗ trống
3.2.1. Thiết kế phần cứng
o Phần cứng cần thiết của cảm biến thông minh tìm chỗ trống STT Tên phần cứng Số lượng 1 Arduino R3 1 2
Cảm biến hồng ngoại IR 2 3 Đèn led 4
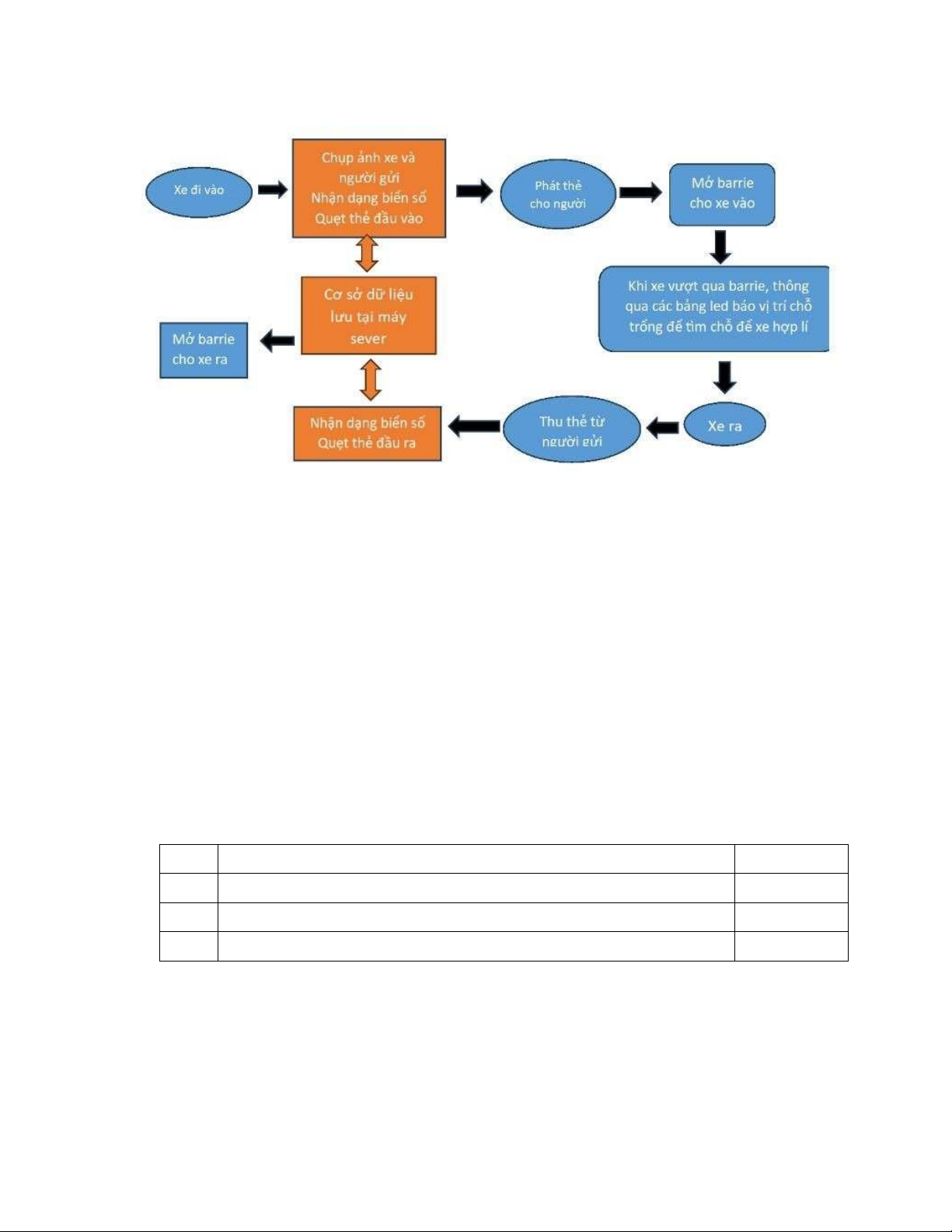
Sơ đồ 3: Mạch cảm biến phát hiện chỗ trống 3.2.2.
Yêu cầu kĩ thuật o Yêu cầu chức năng:
o Có thể báo chỗ nào trống, không trống. o Nhận diện được thông tin cảm biến đưa về.
o Đưa ra thông tin một cách chính xác thông qua đèn led o Hạn chế tính
trạng ách tắc xe tại bãi đỗ vào giờ cao điểm.
o Yêu cầu phi chức năng:
o Hoạt động mượt mà, ổn định.
o Hệ thống tiết kiệm, an toàn. o Tuổi thọ hoạt động cao. o Hệ thống dễ
dàng lắp đặt, bảo trì và cập nhật. o Hệ thống có thể dễ dàng thay đổi
quy mô khi cần thiết. o Cảm biến hồng ngoại IR hoạt động một cách chính xác mượt mà.
o Hệ thống dễ làm quen, sử dụng. o Arduino R3 nhận diện, xử lí thông
tin một cách chính xác mượt mà. 3.2.3.
Nguyên lý hoạt động
o Khi vị trí đỗ xe oto không có xe đỗ, đèn led sẽ tắt, báo hiệu vị trí đang
trống, người lãi xe có thể đến đỗ xe vào
o Khi vị trí đỗ xe oto có xe đỗ, đèn led sẽ bật, báo hiệu vị trí đã có xe, người
lái xe không thể đỗ ở đây
3.3. Thông số kĩ thuật
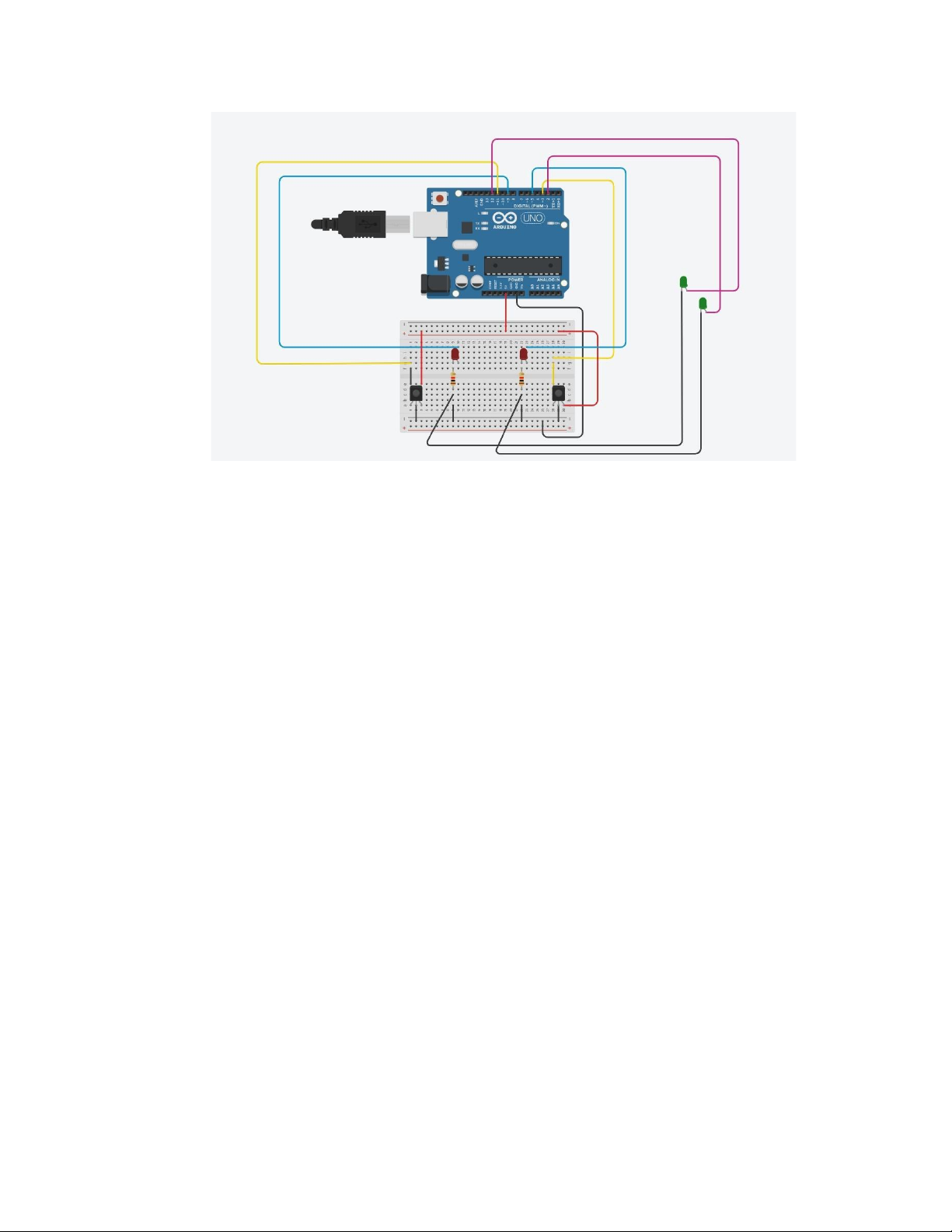
3.3.1. Arduino UNO R3 Nội dung Thông số Vi điều khiển ATmega328 họ 8bit Điện áp hoạt động
5V DC (chỉ được cấp qua cổng USB) Tần số hoạt động 16 MHz Dòng tiêu thụ khoảng 30mA Điện áp vào khuyên dung 7-12V DC Điện áp vào giới hạn 6-20V DC Số chân Digital I/O 14 (6 chân hardware PWM) Số chân Analog 6 (độ phân giải 10bit)
Dòng tối đa trên mỗi chân I/O 30 mA Dòng ra tối đa (5.5V) 500 mA Dòng ra tối đa (3.3) 50 mA Bộ nhớ flash
32 KB (ATmega328) với 0.5KB dùng bởi bootloader SRAM 2 KB (ATmega328) EEPROM KB (ATmega328)
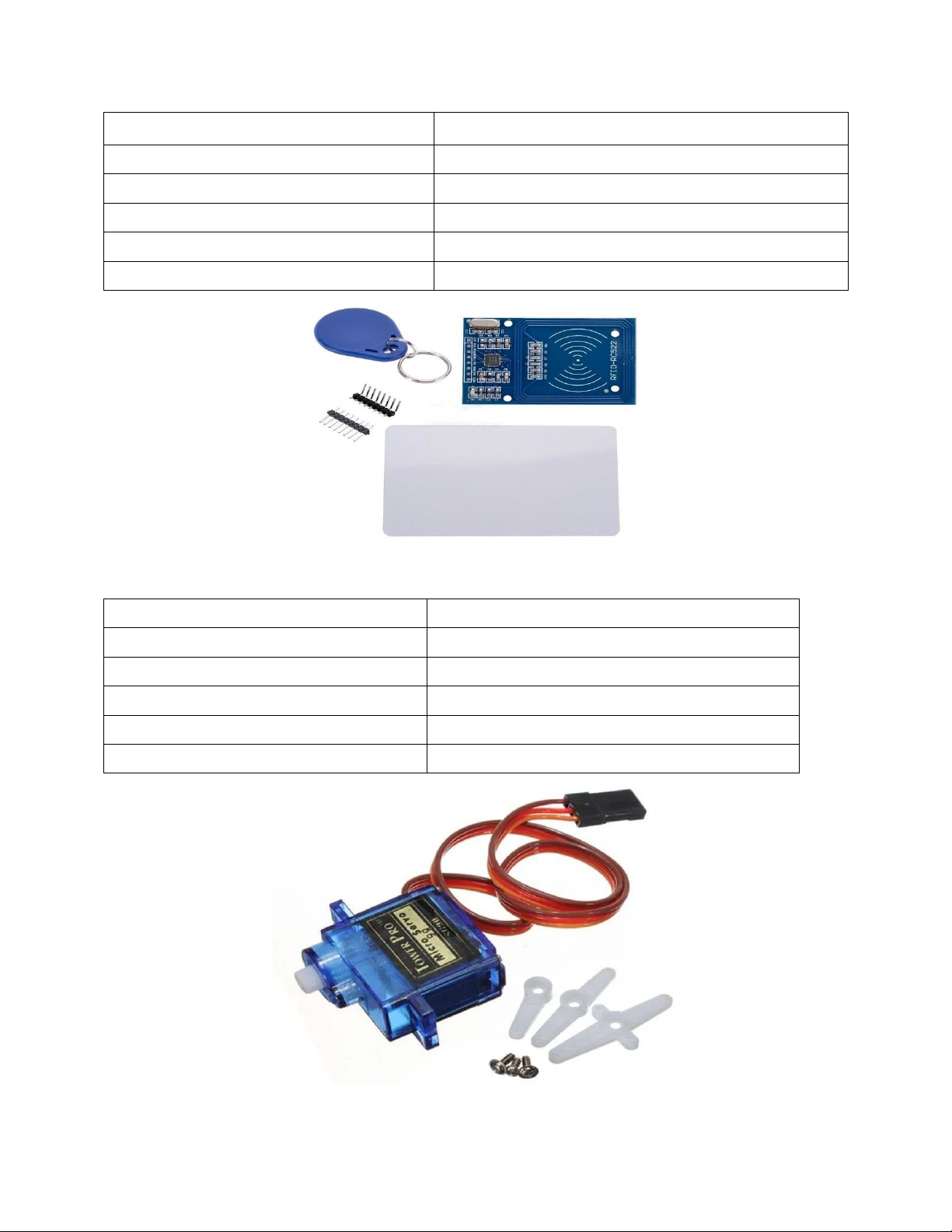
3.3.2. RFID NFC 13.56MHz RC522 Nội dung Thông số Nguồn 3.3VDC, 13 – 26mA Dòng ở chế độ chờ 10-13mA Dòng ở chế độ nghỉ <80uA Tần số sóng mang 13.56MHz Khoảng cách hoạt động 0~60mm (mifare1 card) Giao tiếp SPI
Tốc độ truyền dữ liệu 10Mbit/s Nhiệt độ hoạt động -20 đến 80°C Hỗ trợ ISO / IEC 14443A /MIFAR Kích thước 60mm×40mm
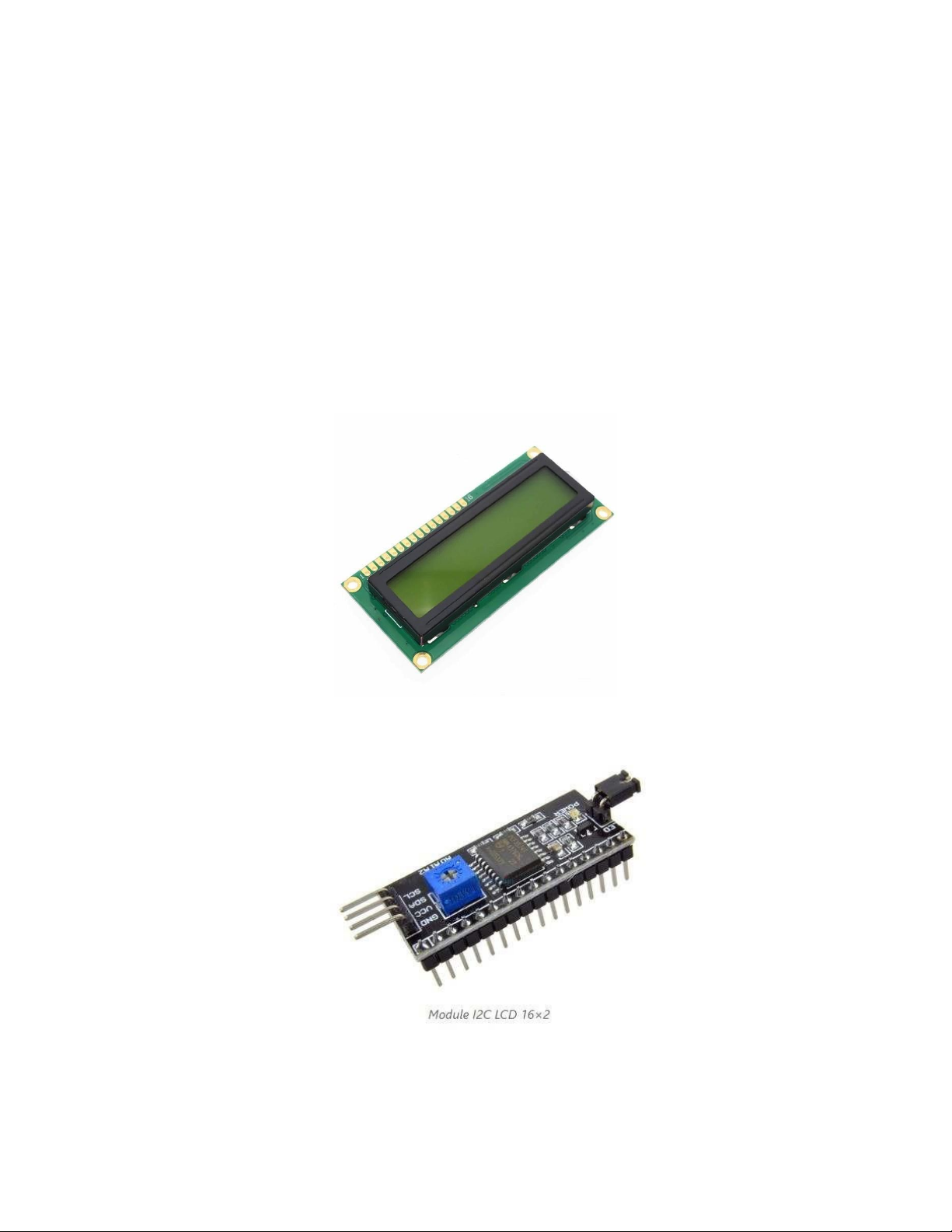
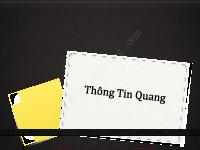
3.3.3. Động cơ servo SG90 180 độ Nội dung Thông số Điện áp hoạt động 4.8-5VDC Tốc độ 0.12 sec/ 60 deg (4.8VDC) Lực kéo 1.6 Kg.cm Kích thước 21x12x22mm Trọng lượng 9g 3.3.4. LCD I2C o LCD
- LCD 16×2 có 16 chân trong đó 8 chân dữ liệu (D0 – D7) và 3 chân điều khiển (RS, RW, EN).
- 5 chân còn lại dùng để cấp nguồn và đèn nền cho LCD 16×2.
- Các chân điều khiển giúp ta dễ dàng cấu hình LCD ở chế độ lệnh
hoặc chế độ dữ liệu.
- Chúng còn giúp ta cấu hình ở chế độ đọc hoặc ghi.
- LCD 16×2 có thể sử dụng ở chế độ 4 bit hoặc 8 bit tùy theo ứng dụng ta đang làm o I2C
- Thay vì phải mất 6 chân vi điều khiển để kết nối với LCD 16×2 (RS, EN,
D7, D6, D5 và D4) thì module IC2 bạn chỉ cần tốn 2 chân (SCL, SDA) để kết nối.
- Module I2C hỗ trợ các loại LCD sử dụng driver HD44780(LCD 16×2, LCD
20×4, …) và tương thích với hầu hết các vi điều khiển hiện nay. - Thông số kĩ thuật:
• Điện áp hoạt động: 2.5-6V DC.
• Hỗ trợ màn hình: LCD1602,1604,2004 (driver HD44780). • Giao tiếp: I2C.
• Địa chỉ mặc định: 0X27 (có thể điều chỉnh bằng ngắn mạch chân A0/A1/A2).
• Tích hợp Jump chốt để cung cấp đèn cho LCD hoặc ngắt.
• Tích hợp biến trở xoay điều chỉnh độ tương phản cho LCD.
3.2.5. Cảm biến hồng ngoại IR Nội dung Thông số IC so sánh LM393 Điện áp 3.3V - 6VDC Dòng tiêu thụ - Vcc = 3.3V: 23 mA - Vcc = 5.0V: 43 mA Góc hoạt động 35° Khoảng cách phát hiện 2 ~ 30 cm LED - Báo nguồn - Báo tín hiệu ngõ ra Mức logic ngõ ra
- Mức thấp - 0V: khi có vật cản
- Mức cao - 5V: khi không có vật cản Kích thước 3.2cm x 1.4cm 3.4. Hạn chế
o Về cấp nguồn cho hệ thống barie
- Chưa tìm được nguồn cấp thích hợp để sử dụng cho hệ thống ngoài
Laptop o Về lỗi kĩ thuật của cảm biến hồng ngoại IR
- Khi ở nơi có cường độ sáng cao, cảm biến hồng ngoại IR sẽ khó hoạt động trơn tru, ổn định
o Hạn chế về kiến thức
- Chưa tìm được phương pháp để kết nối 2 hệ thống độc lập này nên còn hạn
chế về việc báo hiệu chỗ còn trống trong bãi gửi xe KẾT LUẬN
Sau quá trình tìm hiểu về thiết kế, cơ chế hoạt động của các mođun cảm biến,
chúng em đã biết them nhiều kiến thức mới về các linh kiện điện tử, hiểu rõ về lập
trình. Từ đó, kết hợp với vốn kiến thức đã có sẵn từ trước của chúng em để hoàn
thành báo cáo sơ lược về thiết kế bãi đỗ xe tự động, hiểu rõ được về một phần nào
đó liên quan đến lý thuyết điện tử viễn thông.
Một lần nữa, chúng em xin cảm ơn thầy Nguyễn Tiến Dũng đã cho bọn em có
cơ hội để tìm hiểu kỹ hơn về môn học.
Trân trọng cảm ơn!
Tài liệu liên quan:
-
Bài giảng Hệ thống viễn thông | Đại học Bách Khoa Hà Nội
35 18 -

Tài liệu hướng dẫn: Sử dụng phần mềm ALTIUM trong thiết kế mạch điện tử môn Điện tử - Viễn thông | Đại học Bách Khoa Hà Nội
28 14 -
Báo cáo Dự án Thiết bị cảm biến màu môn Nhập môn Điện tử - Viễn thông | Trường Đại học Bách Khoa Hà Nội
107 54 -

Báo cáo Mạch LED hình trái tim môn Nhập môn Điện tử - Viễn thông | Trường Đại học Bách Khoa Hà Nội
89 45 -

Báo cáo Dự án Máy vệ sinh thông minh cho mèo môn Nhập môn Điện tử - Viễn thông | Trường Đại học Bách Khoa Hà Nội
97 49