CHƯƠNG 3: TÍNH CHỌN VÀ THIẾT KẾ BỘ ĐIỀU KHIỂN- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
I. LỰA CHỌN PHƯƠNG ÁN ĐIỀU KHIỂN
1. Lựa chọn phương pháp điều khiển
Hiện nay với sự phát triển của công nghệ vi điều khiển và điện tử công suất có rất nhiều phương pháp để điều khiển tốc độ của động cơ 3 pha không đồng bộ như FOC, VOC, MPC, .., Tuy nhiên để phù hợp với yêu cầu của đề tài và những kiến thức đã được trang bị trong quá trình học tập nhóm lựa chọn phương pháp điều khiển SPWM để điều
khiển tốc độ động cơ 3 pha không đồng bộ.
CHƯƠNG 3: TÍNH CHỌN VÀ THIẾT KẾ BỘ ĐIỀU KHIỂN- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
Tài liệu gồm 16 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:


Preview text:
CHƯƠNG 3: TÍNH CHỌN VÀ THIẾT KẾ BỘ ĐIỀU KHIỂN
I. LỰA CHỌN PHƯƠNG ÁN ĐIỀU KHIỂN
1. Lựa chọn phương pháp điều khiển
Hiện nay với sự phát triển của công nghệ vi điều khiển và điện tử công suất có rất
nhiều phương pháp để điều khiển tốc độ của động cơ 3 pha không đồng bộ như FOC,
VOC, MPC, .., Tuy nhiên để phù hợp với yêu cầu của đề tài và những kiến thức đã được
trang bị trong quá trình học tập nhóm lựa chọn phương pháp điều khiển SPWM để điều
khiển tốc độ động cơ 3 pha không đồng bộ.
2. Phương pháp điều khiển SPWM a) Nguyên lý
Phương pháp SPWM (Pulse Width Modulation - Điều chế độ rộng xung) là một
phương pháp điều khiển điện áp ra của bộ biến tần bằng cách thay đổi độ rộng của các
xung điện áp được tạo ra. Trong phương pháp này, điện áp ra của bộ biến tần được chia
thành nhiều xung có độ rộng khác nhau, và tần số của các xung này được giữ cố định. Độ
rộng của các xung điện áp được điều khiển bởi bộ điều khiển tốc độ, và nó phụ thuộc vào
tốc độ mong muốn của động cơ.
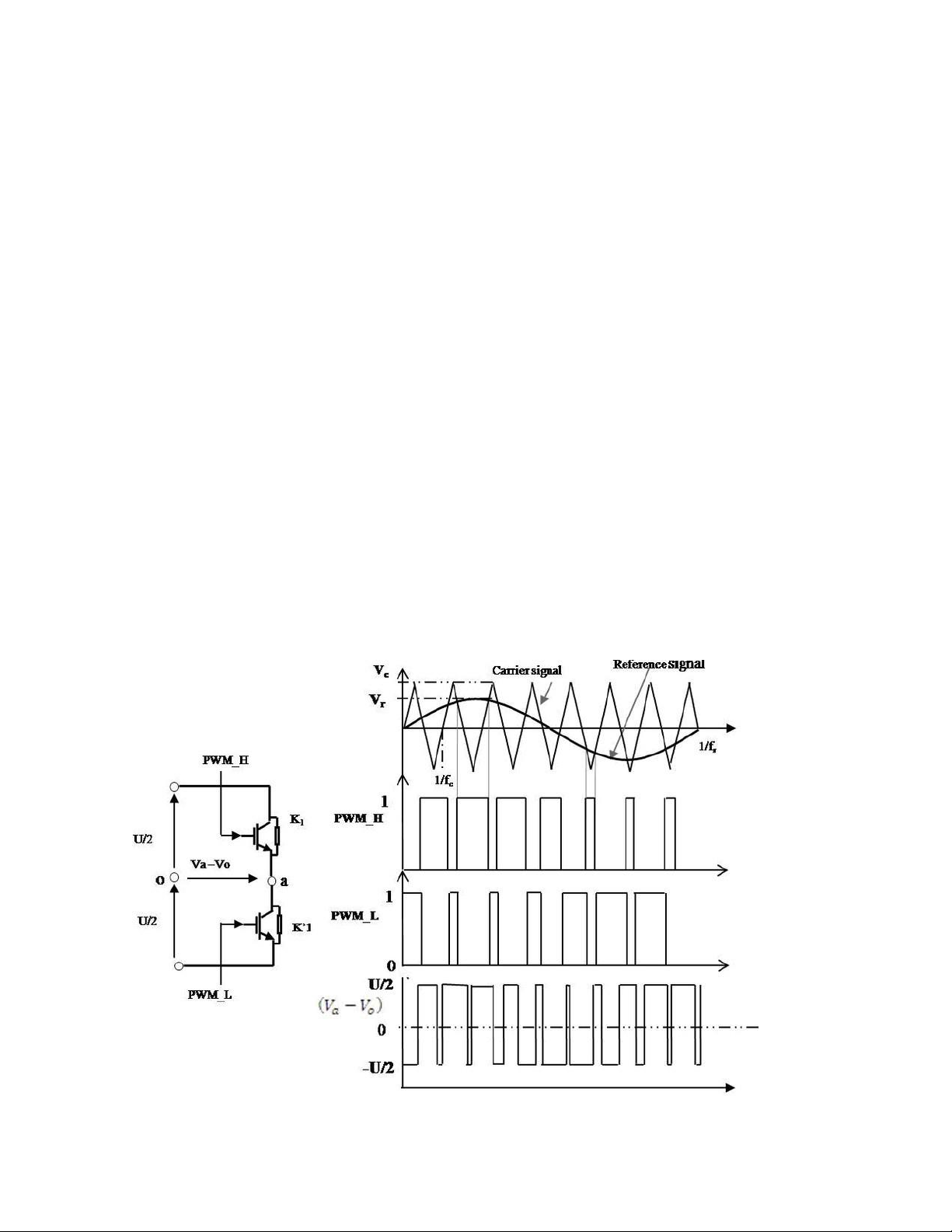
Xung điều khiển kích mở các van nghịch lưu được xác định bằng cách so sánh
(dùng khếch đại thuật toán không phản hồi) giữa tín hiệu điều khiển và tín hiệu tham
chiếu. Trong đồ án này ta sử dụng tín hiệu điều khiển là sóng sin và tín hiệu tham chiếu là sóng tam giác.
Hình 3.1 Sơ đồ nguyên lý dạng sóng của bộ điều khiển SPWM
b) Cách thức điều khiển tốc độ động cơ
Để điều khiển tốc độ động cơ ta tiến hành điều khiển điện áp đầu ra của bộ nghịch
lưu (UO) thông qua việc thay đổi các thông số của điện áp điều khiển có dạng hình sin (Udk):
➢ Thay đổi tần số Udk sẽ thay đổi tần số UO
➢ Thay đổi biên độ Udk sẽ thay đổi điện áp UO
Trong đồ án này ta chỉ điều khiển động cơ bằng cách thay đổi tần số của Udk còn
biên độ của Udk và biên độ của tín hiệu tham chiếu sẽ bằng nhau và không đổi suốt quá
trình động cơ hoạt động.
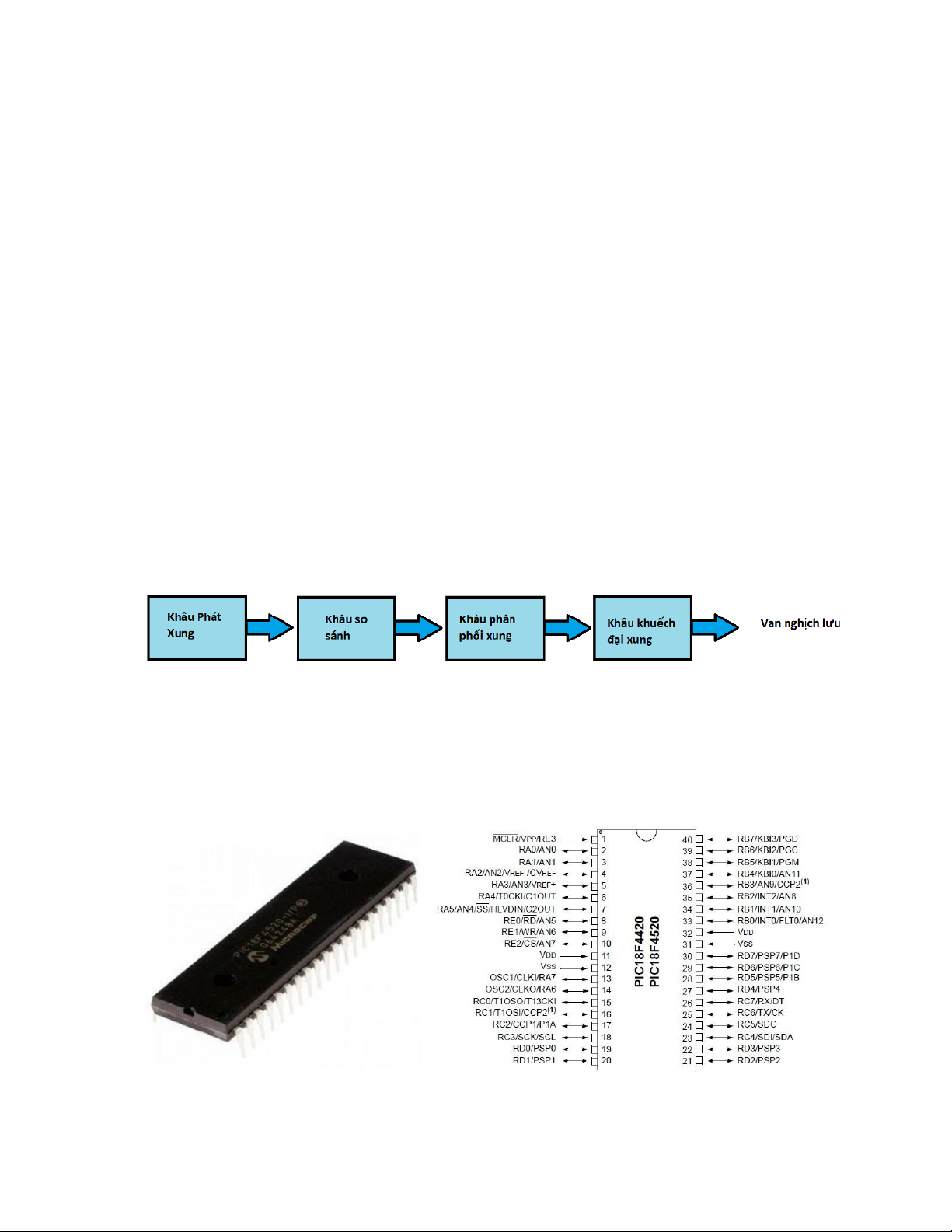
c) Sơ đồ khối của bộ điều khiển SPWM
Bộ điều khiển PWM cơ bản gồm các thành phần:
• Khâu phát xung: Phát tín hiệu điều khiển và tham chiếu.
• Khâu so sánh: So sánh tín hiệu điều khiển và tín hiệu tham chiếu từ đó xuất ra tín
hiệu xung vuông ở ngõ ra.
• Khâu phân phối xung: Phân phối xung đến các van điều khiển đẻ kích mở các van
theo một quy luật nhất định.
• Khâu khuếch đại xung: Khuếch đại tín hiệu xung vuông phù hợp với yêu cầu của
van nghịch lưu và cách ly mạch điều khiển với mạch động lực.
Hình 3.2 Sơ đồ cấu trúc các khối của bộ điều khiển SPWM
II. Tính chọn linh kiện cho bộ điều khiển SPWM
1. Vi điều khiển PIC18F4520
Hình 3.3 Vi điều khiển PIC18F4520 và sơ đồ chân
Một số đặc điểm chung của PIC18F4520 bao gồm:
• Kiến trúc vi xử lý RISC 8-bit.
• Tốc độ xử lý nhanh và khả năng xử lý các tác vụ phức tạp.
• Bộ nhớ Flash lên đến 32KB cho việc lưu trữ chương trình ứng dụng.
• RAM lên đến 1536 bytes.
• Các giao diện ngoại vi như USART, SPI, I2C, và nhiều chân IO để kết nối với các
thành phần ngoại vi khác nhau.
• Tích hợp bộ chuyển đổi analog-to-digital (ADC) cho việc đo lường tín hiệu analog.
• Các tính năng bảo mật như chế độ bảo vệ Flash và bảo mật bằng mật khẩu.
• Điện áp hoạt động 2-5,5V • Số chân I/O: 36 • Loại chân: TQFP-44
PIC18F4520-I/P thường được lập trình bằng các ngôn ngữ lập trình như C hoặc
Assembly, và nó có một số công cụ phát triển và môi trường lập trình hỗ trợ từ Microchip
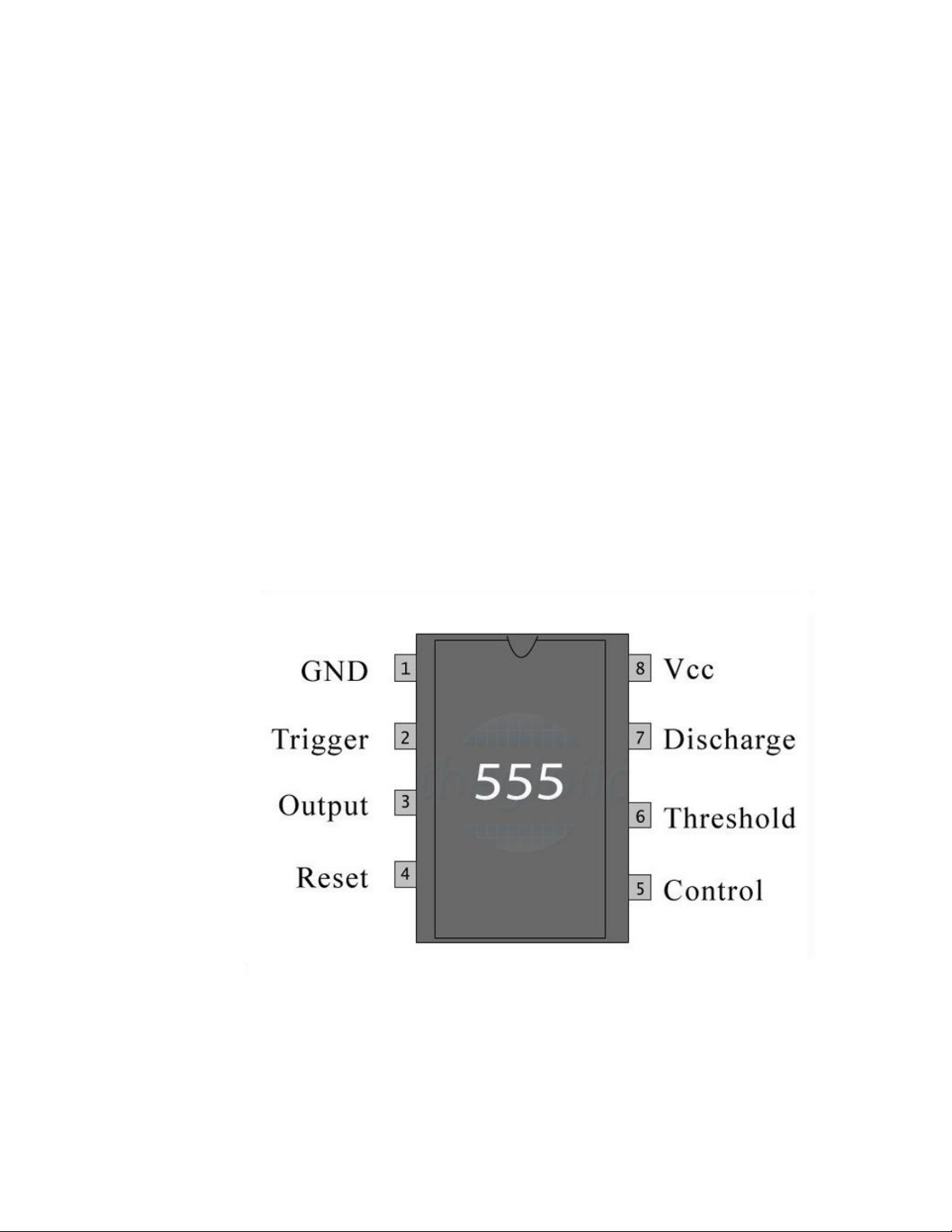
để giúp bạn phát triển ứng dụng nhúng trên nó. 2. IC định thời 555
IC 555 là một thiết bị linh hoạt và hữu dụng nhất trong các thiết kế và mạch điện tử
hoạt động ở cả trạng thái ổn định và bất ổn định. Nó có thể cung cấp thời gian trễ từ micro
giây đến nhiều giờ. IC 555 là một vi mạch rất rẻ, hoạt động với nhiều mức điện áp (thông
thường, từ 4,5 đến 15V DC) và các điện áp đầu vào khác nhau được cung cấp không ảnh
hưởng đến đầu ra của bộ định thời.
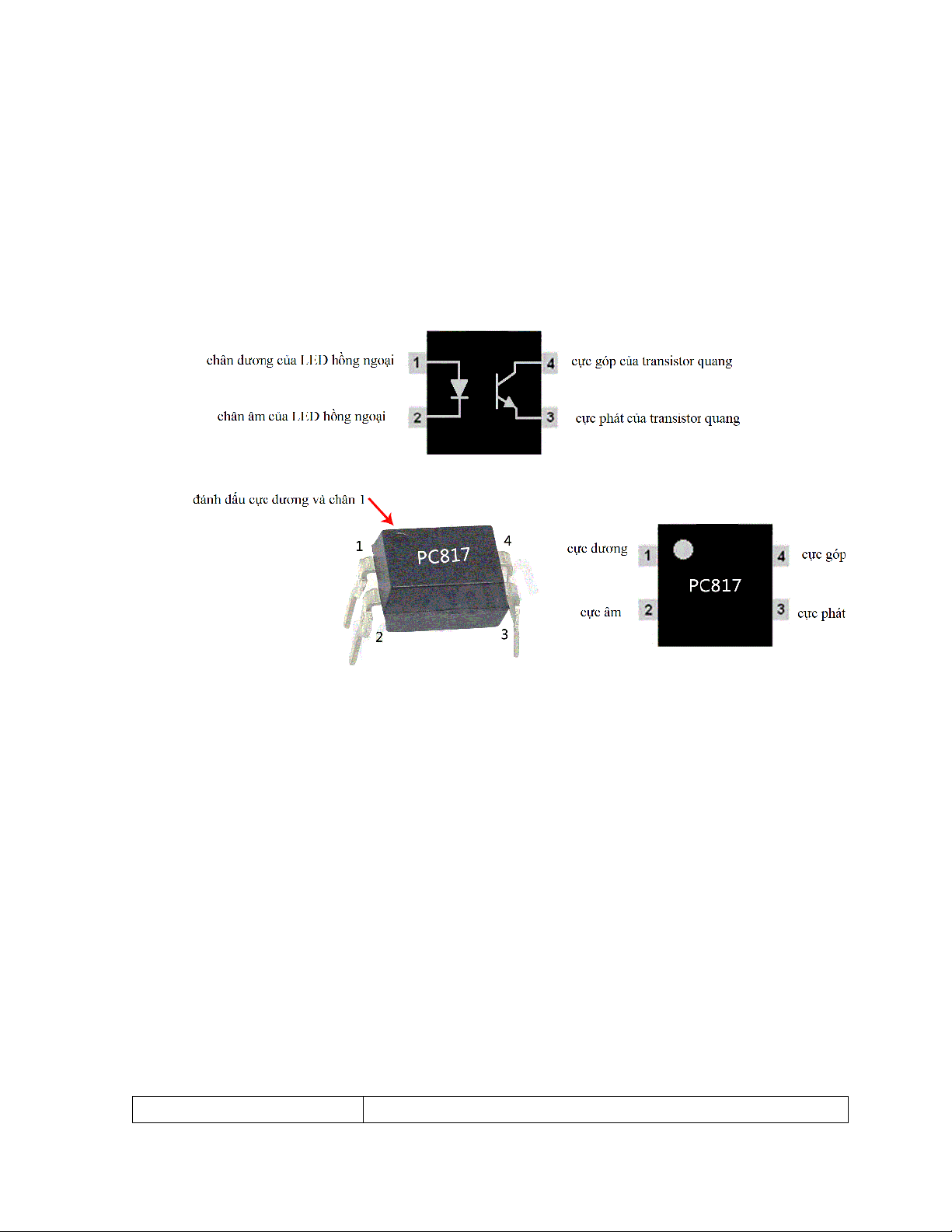
Hình 3.4 Sơ đồ chân IC555 3. OPTO PC817 Thông số:
• Loại gói: Dip 4 chân và SMT • Loại transistor: NPN
• Dòng cực góp tối đa (IC): 50mA
• Điện áp cực góp - cực phát tối đa (VCEO): 80V
• Điện áp bão hòa cực góp - cực phát: 0,1 đến 0,2
• Điện áp cực phát - cực gốc tối đa (VEBO): 6V
• Công suất tiêu tán cực góp tối đa (Pc): 200 mW
• Nhiệt độ lưu trữ và hoạt động phải là: -55 đến +120 độ C để lưu trữ và -30 đến +100 để hoạt động
Hình 3.5 Sơ đồ cấu trục OPTO PC817 4. Opamp LM741
Tính năng / Thông số kỹ thuật của IC LM741:
• IC này chứa mạch bảo vệ quá tải ở đầu vào và đầu ra.
• IC cũng chứa mạch bảo vệ ngắn mạch.
• Mạch bên trong được thiết kế để luôn ổn định ở các nhiệt độ khác nhau.
• Có thể hoạt động trong phạm vi cấp nguồn rộng.
• Có thể được vận hành với cả nguồn đơn và kép.
• Tiêu thụ điện năng thấp. • Độ lợi cao.
• Mạch bên trong cũng được bảo vệ chốt (latch up).
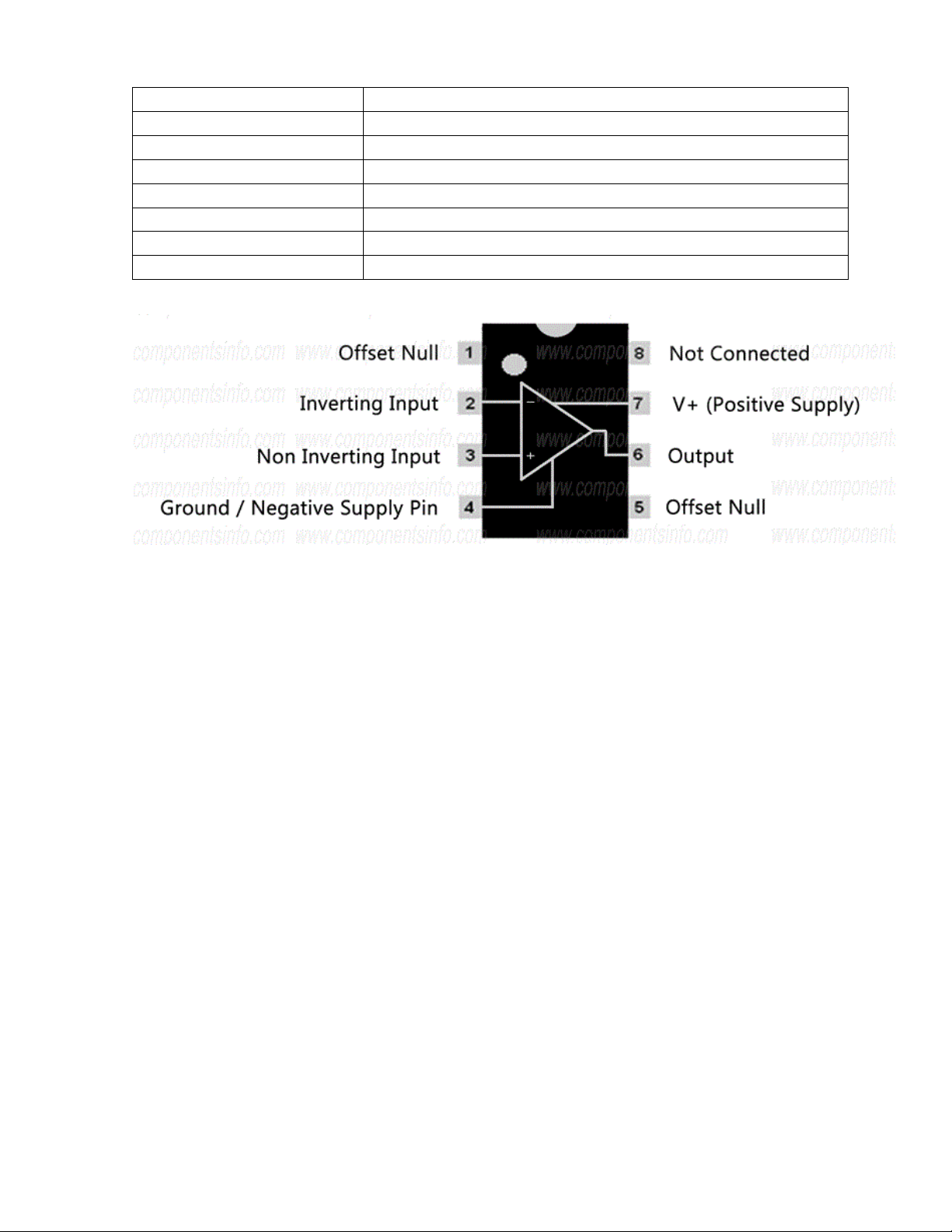
• Dòng hoạt động từ 1,7 đến 2,8mA. Sơ đồ chân Số chân Tên chân 1 Offset Null 2 Inverting Input 3 Non Inverting Input 4 V- 5 Offset Null 6 Output 7 V+ 8 NC
Bảng 4.1 Sơ đồ chân IC LM741
Hình 3.6 Sơ đồ chân IC LM741
III. Thiết kế và mô phỏng mạch điều khiển 1. Khâu phát xung
a) Thiết kế khâu tạo sóng sin có thể tùy chỉnh tần số
Sử dụng vi điều khiển PIC18F4520 để tạo ra 3 sóng sin có cùng biên độ, lệch pha
nhau 2π/3 và có thể điều chỉnh tần số bằng các bước như sau:
o Tạo ba mảng, mỗi mảng gồm 255 phần tử lưu các giá trị nhị phân đã được quy đổi
từ 255 giá trị analog của 1 chu kỳ sóng sin (chương trình cụ thể được viết ở dưới).
o Xuất tín hiệu nhị phân đầu tiên từ 3 mảng lần lượt ra PORTB, PORTC, PORTD
của vi điều khiển, sau một khoảng thời gian t_delay thì xuất phần tử tiếp theo, cứ
lặp lại như thế cho điến khi hết 255 phần tử thì quay lại từ đầu.
o Dùng bộ giải mã DAC theo cấu trúc mạch R2R LADER để chuyển tín hiệu digital
từ các port thành tín hiệu analog.
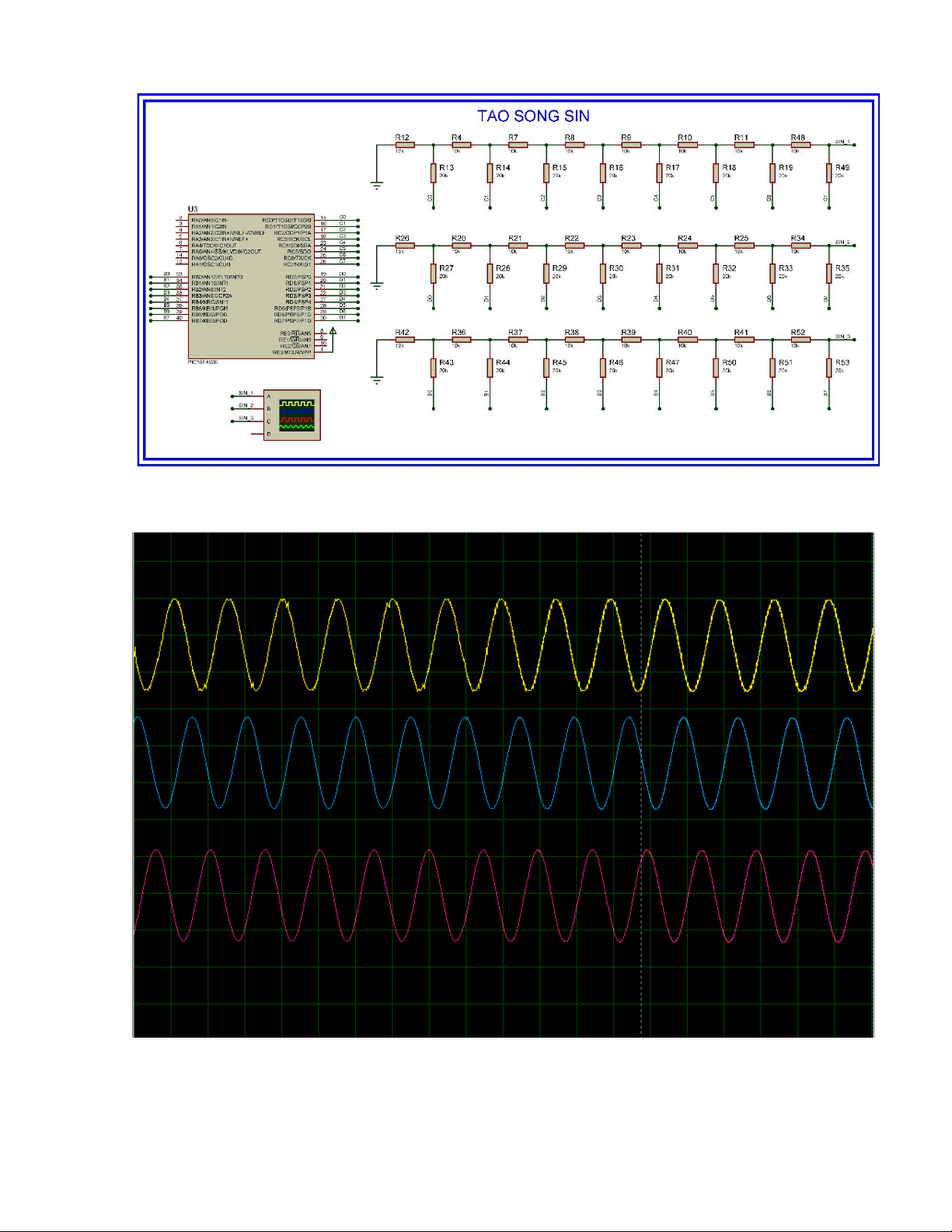
Hình 3.7 Sơ đồ mô phỏng mạch tạo sóng Sin
Hình 3.8 Ba tín hiệu điều khiển có dạng sóng Sin
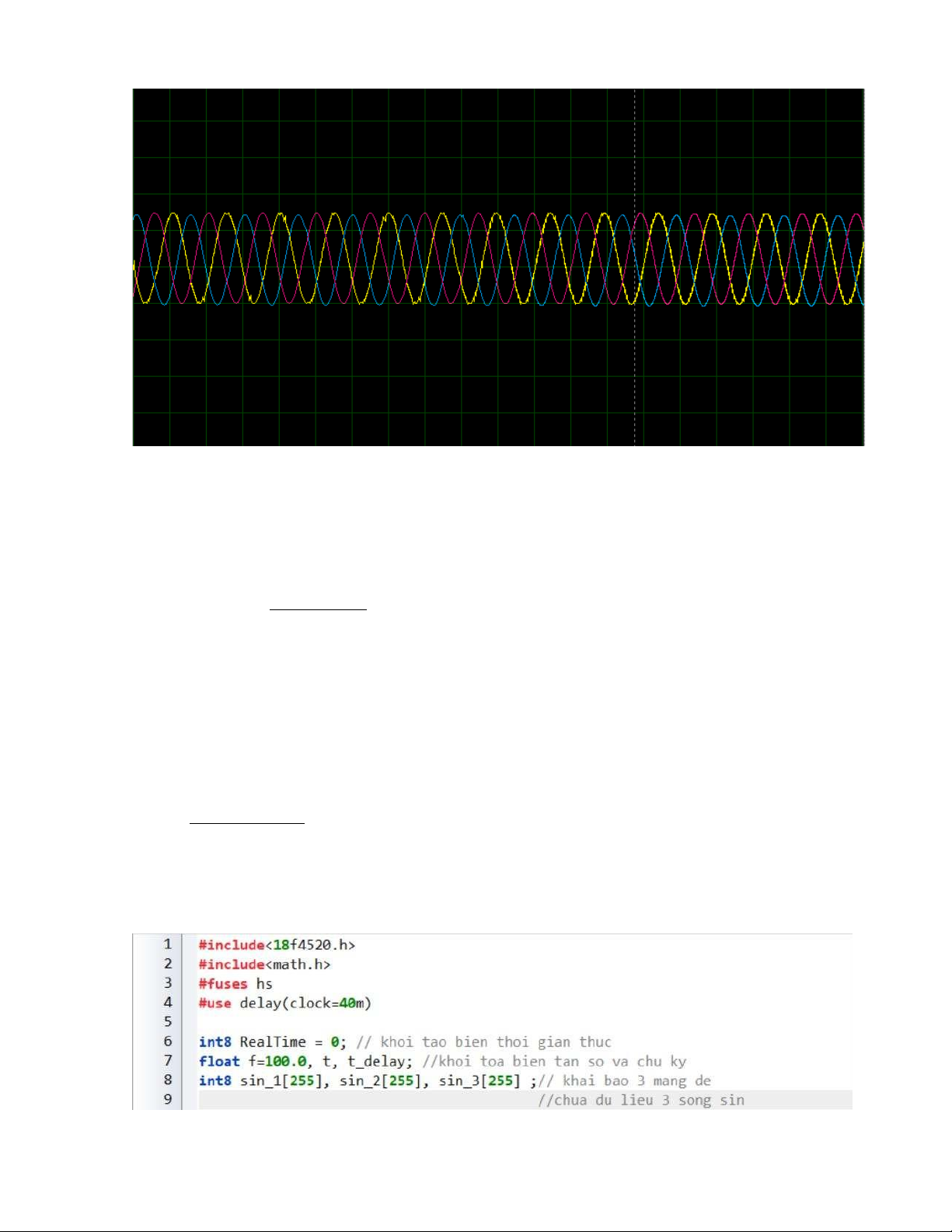
Hình 3.9 Ba tín hiệu sóng sin khi đặt trên cùng 1 hệ trục tọa độ
Từ đồ thị hình 3.8 ta có thể thấy 3 tín hiệu hình sin lệch pha nhau 1 góc 2 π/3 phù
hợp với tín hiệu điều khiển yêu cầu của phương pháp điều khiển tốc độ động cơ SPWM.
Chúng ta có thể thay đổi tần số của sóng sin bằng cách thay đổi thời gian t_delay với công thức như sau: 1 t_delay = (us) (3.1) f ∗255∗10−6
Để xác định thời gian thay đổi tần số ta dùng bộ định thời TIMER0 của
PIC18F4520 nhằm xác định khoảng thời gian từ lúc động cơ bắt đầu khởi động. Sử dụng
TIMER0 ở chế độ 16bit, bộ chia tần số tỉ lệ 1:256, tần số của vi điều khiển là 40Mhz.
Tạo một biến RealTime = 0 và cứ sau 1s thì tăng biến RealTime lên 1.
Vì vi điều khiển PIC18F4520 xử lý 1 lệnh mất 4 chu kỳ xung nên để ngắt TIMER0
mỗi 1s thì giá trị khởi đầu của TIMER0 được xác định bởi công thức: 1
*(216−1−T 0 set ¿ = 1 (3.2) 6 40∗10 : 4 : 256 => T0set = 26473 Chương trình code:
b) Thiết kế mạch tạo xung tam giác
Do sóng tam giác là tín hiệu tham chiếu tần số không cần phải thay đổi, nếu sóng
tam giác có tần số càng lớn thì điện áp đầu ra của bộ nghịch lưu càng ít nhấp nhô. Trong
đề tài này ta chọn sóng tam giác có tần số không đổi là 2kHz và biên độ bằng với sóng sin (5V).
Các bước tạo ra sóng tam giác có tần số 2kHz điện áp từ 0 đến 5V như sau:
o Dùng IC555 tạo ra xung vuông có tần số 2kHz, Ton = Toff, Umax = 5V.
o Dùng mạch dao động RC để chuyển xung vuông thành xung tam giác có chu kỳ không đổi
o Sử dụng khuếch đại thuật toán để điều chỉnh biên độ xung tam giác về 0V÷5V.
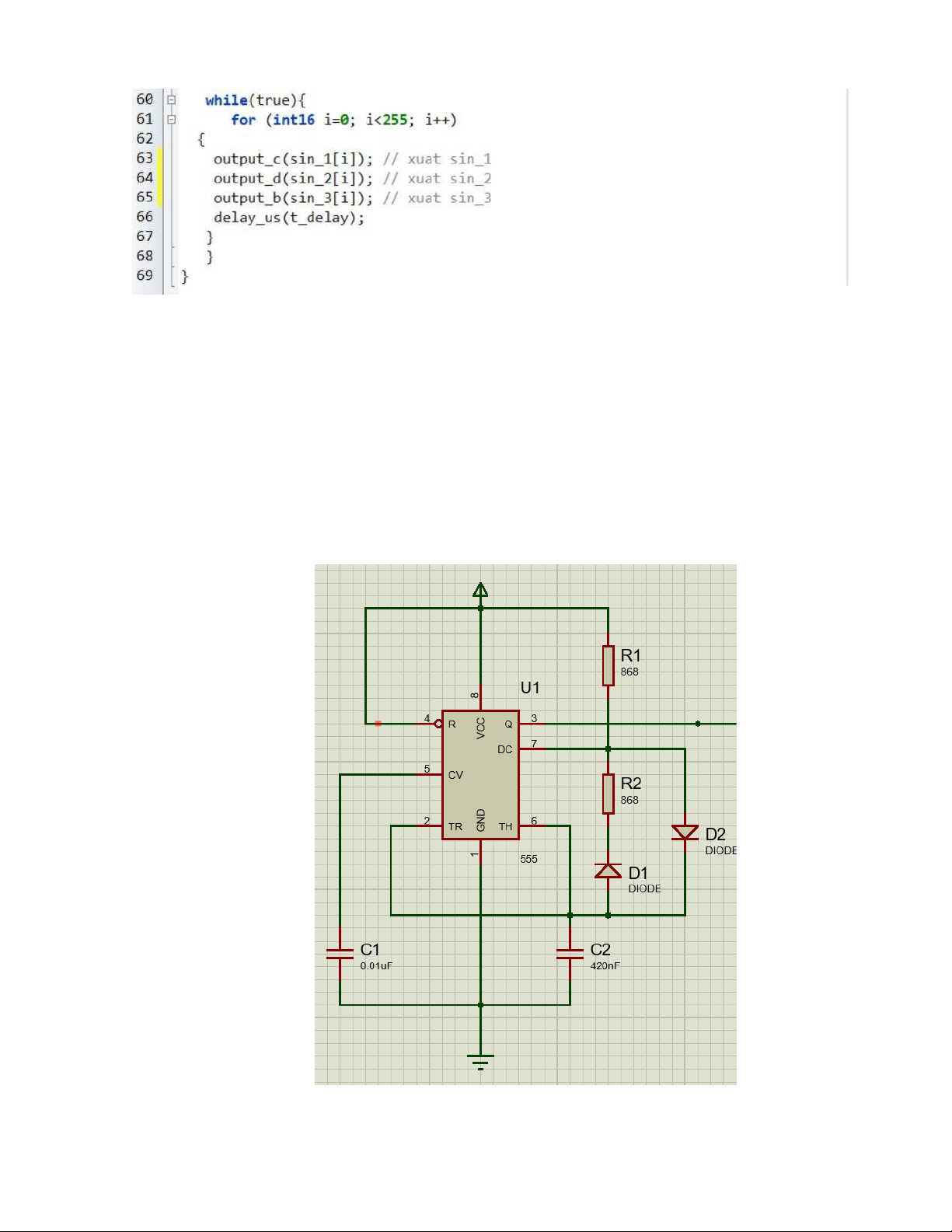
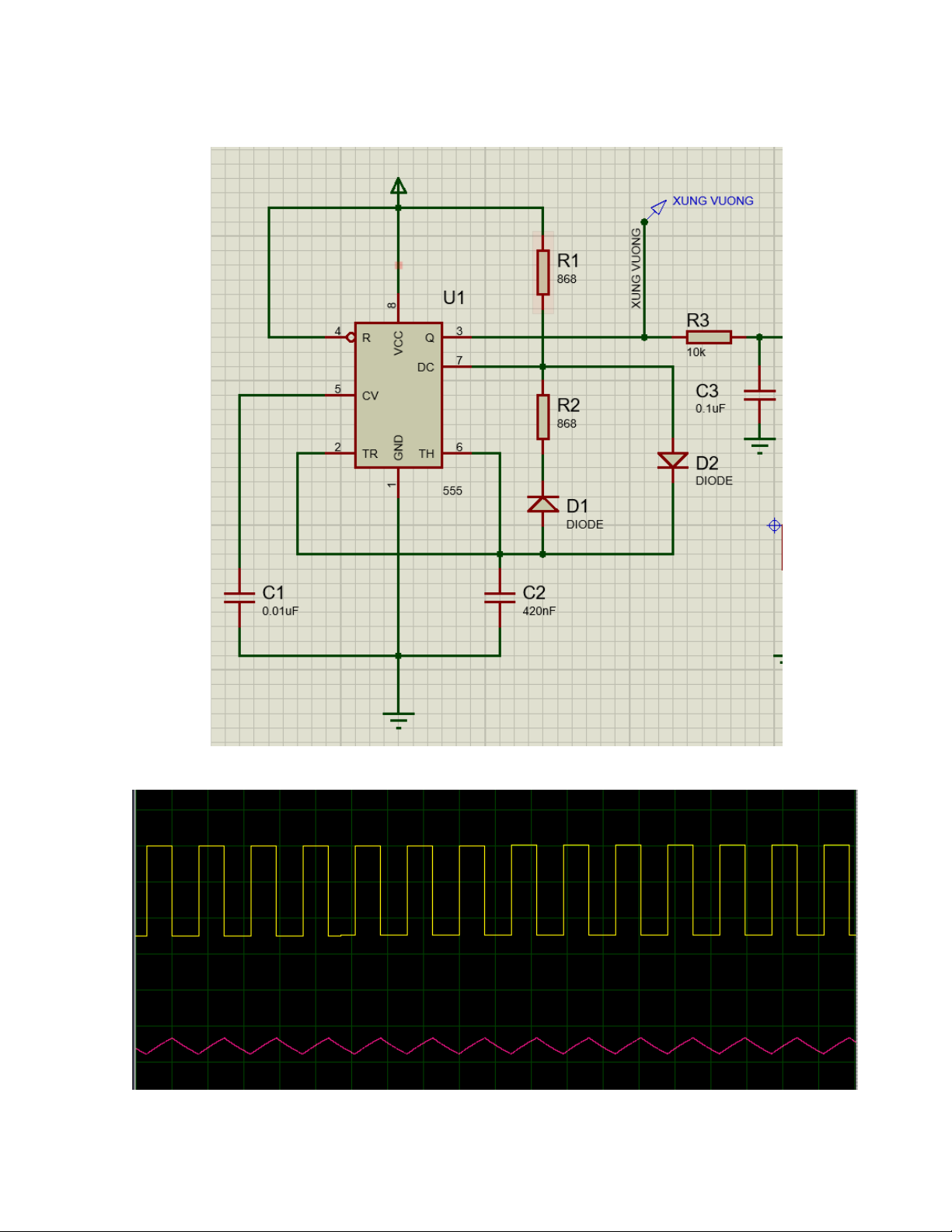
Hình 3.10 Sơ đồ mạch tạo xung vuông
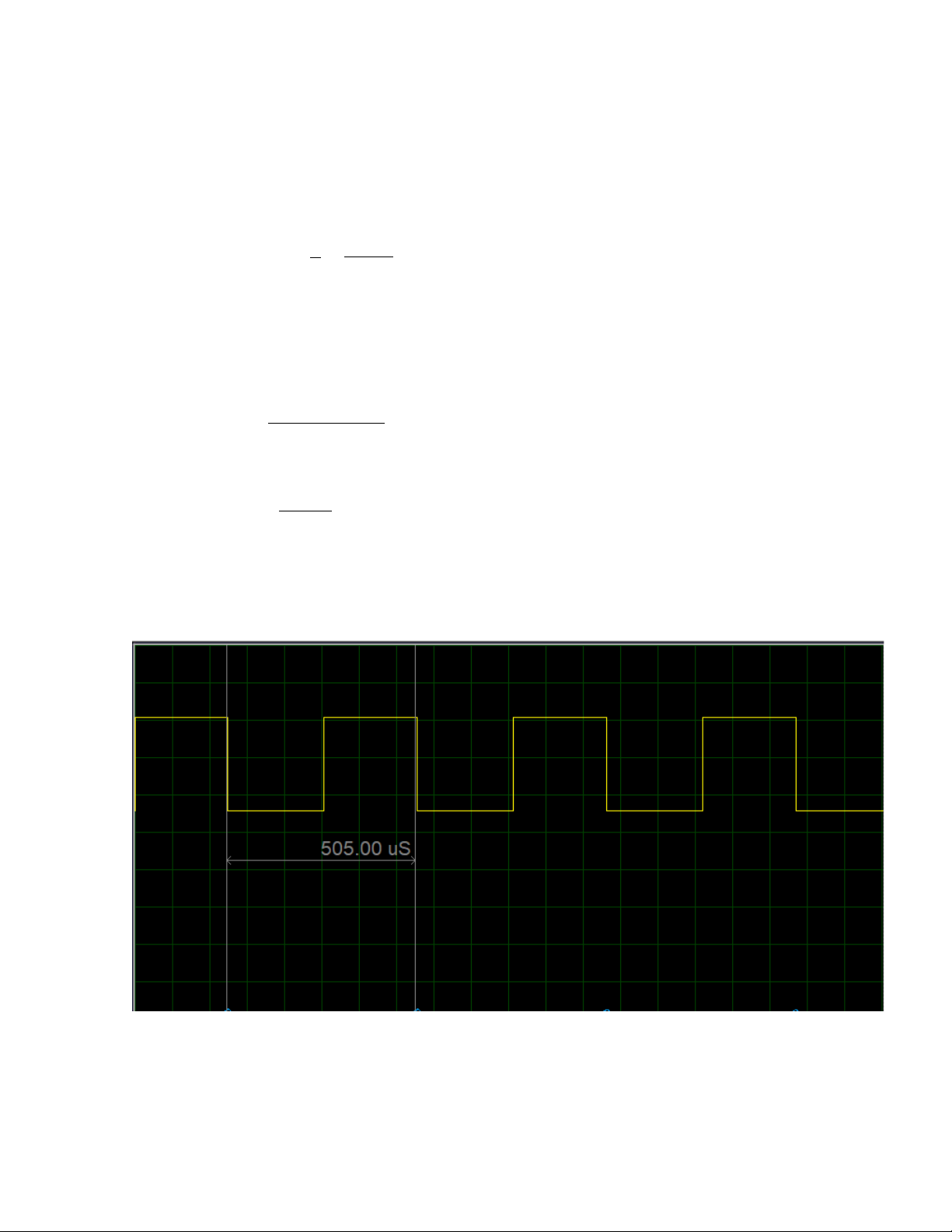
Với sơ đồ mạch như hình 3.10 ta có công thức tính chu kì xung vuông: Thigh = ln2*R1*C2 (3.3) Tlow = ln2*R2*C2 (3.4) Tchu kỳ = ln2*(R1 + R2)*C2 (3.5)
Để tạo xung vuông có tần số f = 2kHz: 1 1 T = = = 0,0005s chu kỳ f 2∗103
Thigh = Tlow = ln2*R1*C2 = ln2*R2*C2 => R2 = R1 (3.6)
Chọn C2=420 nF, từ công thức (3.5) ta có: 0,0005 R1+R2 = = 1717,5 Ω ln 2∗420∗10−9
Từ biểu thức (3.6) suy ra: 1717,5 R1 = R2 = = 858 Ω 2
Tiến hành mô phỏng trên proteus với các thông số vừa tính toán được thu được xung
vuông có đồ thị như Hình 3.11
Hình 3.11 Đồ thị xung vuông tần số 2kHz
Tiếp tục dùng mạch dao động RC để biến xung vuông thành xung tam giác có tần số không đổi
Hình 3.12 Sơ đồ nguyên lý mạch IC555 và mạch dao động RC
Hình 3.13 Đồ thị dạng sóng trước mạch dao động RC và sau mạch dao động RC
Từ độ thị Hình 3.13 ta thấy sau mạch dao động RC tín hiệu sóng tham chiếu đã có
dạng sóng tam giác với tần số bằng với tần số xung vuông (2kHz). Tuy nhiên điện áp đo
được của tín hiệu này trên proteus chỉ nằm trong khoảng 1.92 ÷ 2,83V, do đó ta cần dùng
mạch khuếch đại thuật toán để hiệu chỉnh giá trị xung tam giác về trong khoảng 0 ÷ 5V.
Sử dụng kết hợp mạch khuếch đại không đảo và mạch khuếch đại vi sai để điều chỉnh điện áp mong muốn.
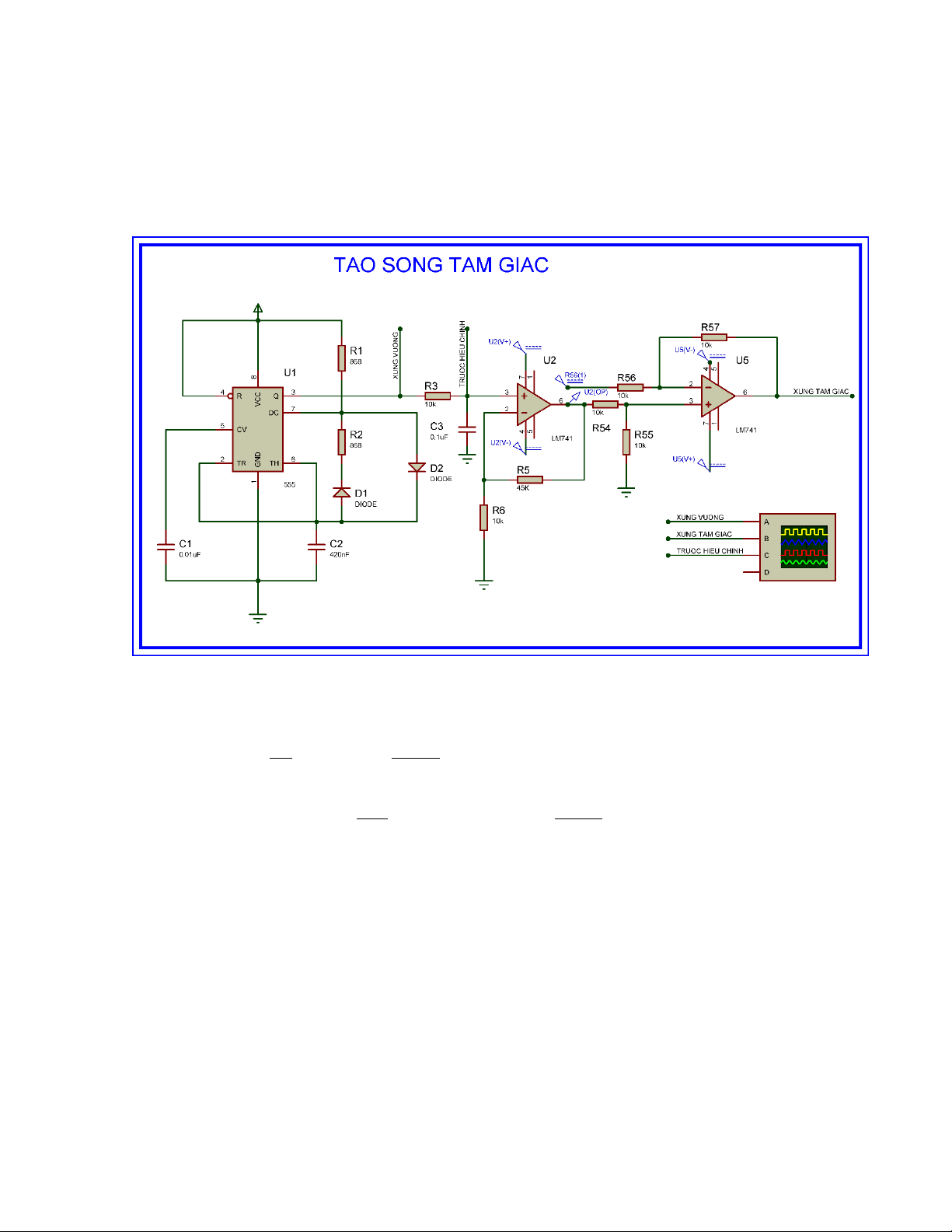
Hình 3.14 Sơ đồ hoàn chỉnh mạch tạo sóng tam giác
Từ sơ đồ mạch 3.14 ta có quan hệ của điện áp trước khi khếch đại (Ui) và điện áp sau khuếch đại (Uo): R5 45000
Uo1 = (1+ R 6 ) *Ui = (1+ 10000 )*Ui = 5.5 Ui (3.7) R56 10000
Uo = (Uo1 – 10,57) * R 54 = (5.5Ui- 10.57)* 10000 = (5.5Ui- 10.57) (3.8)
Do Ui có giá trị từ 1.92 ÷ 2,83V nên theo biểu thức (3.8) Uo sẽ có giả trị 0 ÷5V
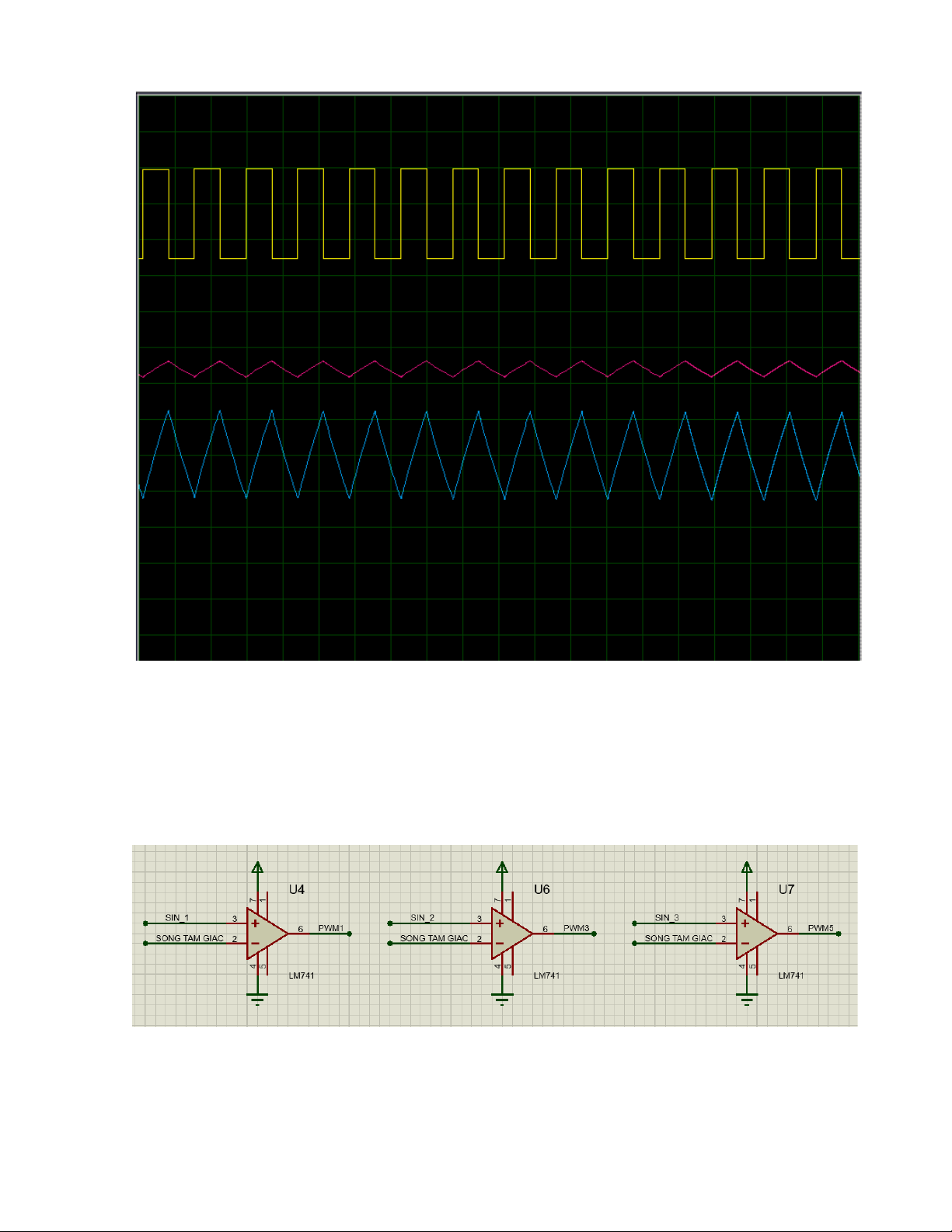
Hình 3.14 biểu diễn đồ thị 3 sóng được tạo ra từ mạch tạo sóng tam giác trong đó:
➢ Đường màu vàng là đồ thị xung vuông có tần số 2kHz tạo ra từ IC555.
➢ Đường màu đỏ là đồ thị xung tam giác có tần số bằng tần số xung vuông, được tạo ra sau mạch dao động RC.
➢ Đường màu xanh là đồ thị xung tam giác đã được khuếch đại (tần số vẫn không
đổi) có điện áp dao động trong khoảng 0 ÷ 5V. Mức điện áp này phù hợp với yêu
cầu của bộ điều khiển SPWM
Hình 3.14 Đồ thị 3 sóng được tạo ra từ mạch tạo sóng tam giác 2. Khâu so sánh
Tiến hành so sánh ba tín hiệu điều khiển (sóng sin) với tín hiệu tham chiếu (sóng
tam giác) từ đó xuất ra xung vuông điều khiển các van nghịch lưu.
Để so sánh ta dùng Opamp LM741 khuếch đại thuật toán không hồi tiếp sơ đồ như hình 3.15.
Hình 3.15 Sơ đồ mạch so sánh
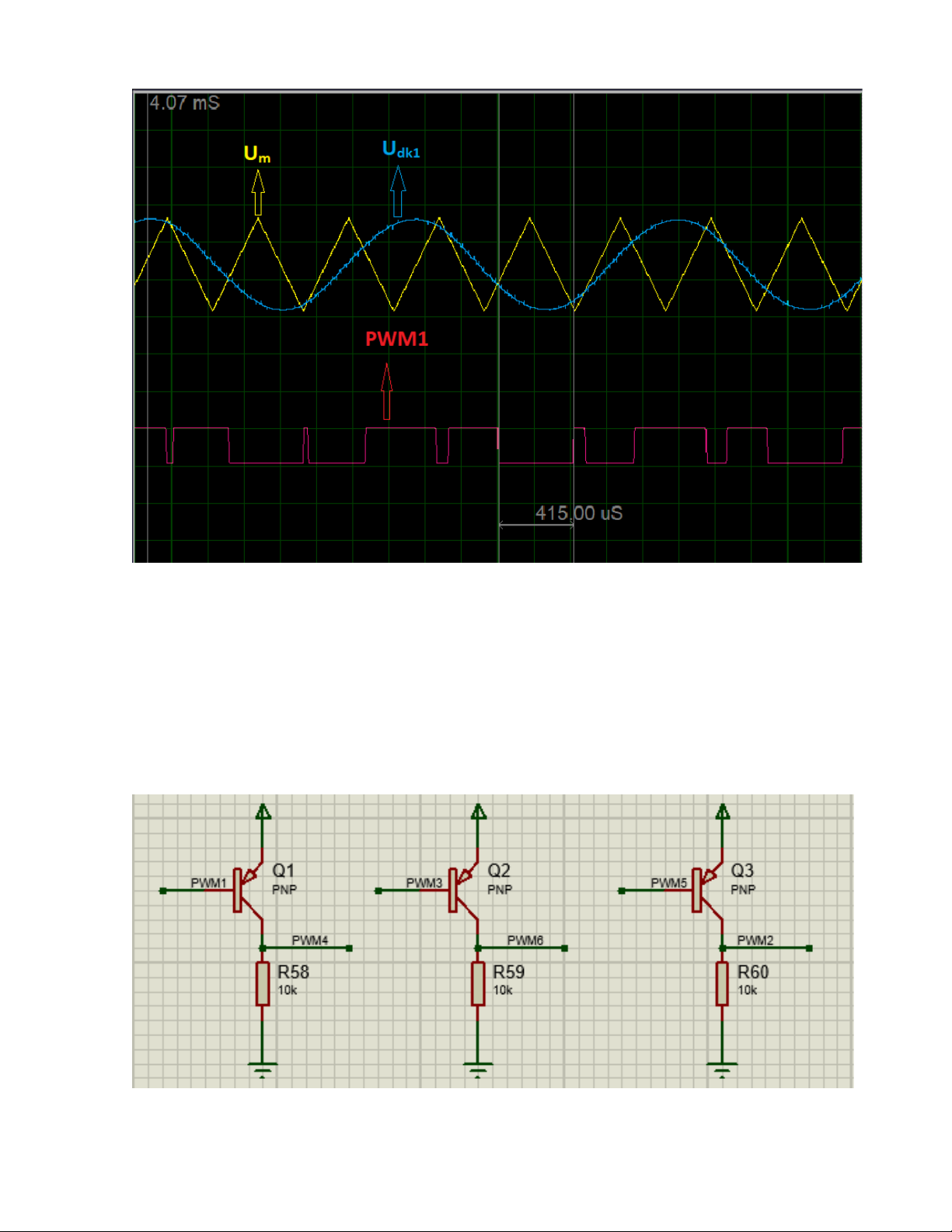
Hình 3.16 Sóng điều khiển SPWM1 thu được khi so sánh Udk1 với ín hiệu tham chiếu(Um)
Từ mạch so sánh ta thu được 3 tín hiệu PWM1, PWM3, PWM5 để kích mở các
van S1, S3. S5 của bộ nghịch lưu. Các van còn lại được kích mở đối xứng với van thẳng
hàng của chính nó. Trong đó van S4 thẳng hàng S1, S6 thằng hàng S3, S2 thẳng hàng S5.
Vì vậy để thu được tín hiệu kích mở van S4 ta đảo tín hiệu PWM1, để thu được tín
hiệu kích mở van S6 ta đảo tín hiệu PWM3, để thu được tín hiệu kích mở van S2 ta đảo
tín hiệu PWM3. Để đạo tín hiệu xung ta dùng BJT PNP như Hình 3.17
Hình 3.17 Sơ đồ mạch đảo tín hiệu PWM
Hình 3.18 Tín hiệu PWM4 thu được bằng cách đảo PWM1
3. Khâu khuếch đại và phân phối xung
Để vừa đảm bảo chức năng đệm xung kích, vừa cách ly mạch điều khiển với mạch
động lực sử dụng Opto quang PC817 với sơ đồ nguyên lý như hình 3.19
Hình 3.19 Khâu khuếch đài và phân phối xung
Các xung điều khiểm PWM1, PWM2, PWM3, PWM4, PWM5, PWM6 sau khi
được đệm bởi mạch khuếch đại sẽ trở thành các tín hiệu S1, S2, S3, S4, S5, S6 để đưa đến
điều khiển kích mở các van. Do opto PC817 hoạt động dựa trên nguyên lý quang điện nên
sẽ đảm bảo tính chất cách ly giữa mạch điều khiển và mạch động lực.
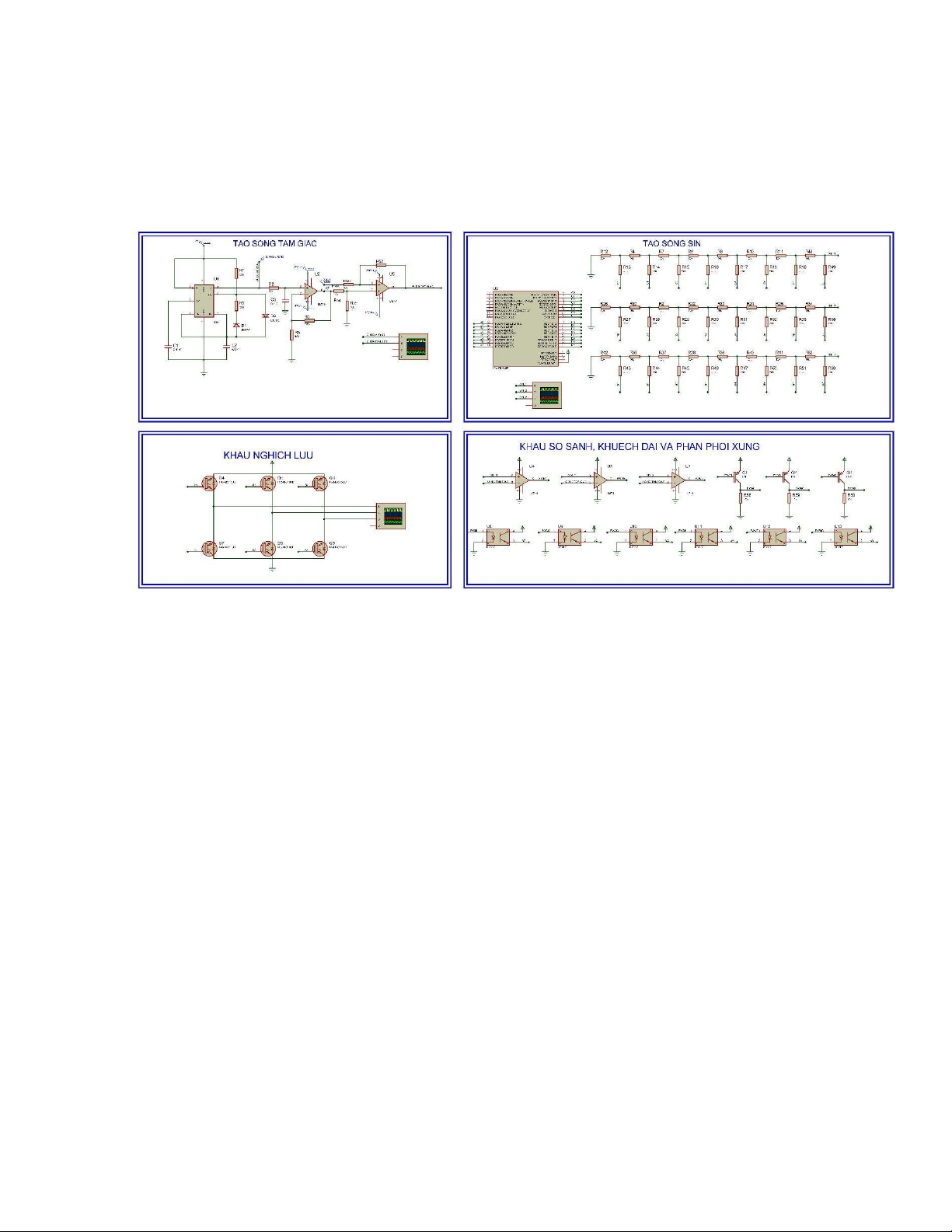
Hình 3.20 Sơ đồ nguyên lý toàn bộ mạch điều khiển
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32