Chương 5: Cấu Tạo và Nguyên Lý Các Đăng ô tô | Tài liệu lý thuyết ô tô
Truyền động các-đăng có chức năng như một bộ phận nối truyền động hai cụm chi tiết máy có trục không đồng tâm (rất khó khăn bản đảm chính xác sự đông tâm của chúng) mà thường cắt nhau dưới một góc lệch nào đó; hoặc thậm chí giá trị góc lệch còn có thể thay đổi trong quá trình xe chuyển động. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Môn: Lý thuyết ô tô (ĐN) 5 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật, Đại học Đà Nẵng 49 tài liệu
Tác giả:

Preview text:
lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
CHƯƠNG 5: THIẾT KẾ TRUYỀN ĐỘNG CÁC-ĐĂNG Ô TÔ
5.1. CHỨC NĂNG & YÊU CÂU CỦA TRUYỀN ĐỘNG CÁC-ĐĂNG
5.1.1. Chức năng và yêu cầu của các-đăng
Truyền động các-đăng có chức năng như một bộ phận nối truyền động hai cụm chi tiết máy
có trục không đồng tâm (rất khó khăn bản đảm chính xác sự đông tâm của chúng) mà thường
cắt nhau dưới một góc lệch nào đó; hoặc thậm chí giá trị góc lệch còn có thể thay đổi trong
quá trình xe chuyển động.
Trên ô tô máy kéo, truyền động các-đăng thường dùng để truyền chuyển động và mô
men xoắn từ hộp số (hoặc từ hộp phân phối) đến các cầu chủ động; và từ cầu chủ động đến
các bánh xe chủ động dẫn hướng hoặc các bánh xe chủ động trong hệ thống treo độc lập.
Ngoài ra, truyền động các-đăng cũng dùng để truyền chuyển động và mô men xoắn giữa các
cụm chi tiết máy phụ khác trên ô tô như: tới trang bị phụ kéo tời quay, trục lái trong hệ thống lái.
Để bảo đảm chức năng nêu trên, ngoài các yêu cầu chung về sức bền và kết cấu gọn nhẹ,
truyền động các-đăng trên ô-tô máy kéo còn phải thoả mãn các yêu cầu đặc trưng riêng biệt sau:
Với bất kì số vòng quay nào của trục các-đăng (ứng với các số truyền từ hộp số hoặc hộp
phân phối), trục không được có dao động, không gây va đập, không gây tải trọng động lớn do mô men quán tính gây ra.
Các trục các-đăng phải bảo đảm quay đều, không có hiện tượng công hưởng với bất kì chế
độ số vòng quay làm việc nào truyền đến trục các-đăng.
Hiệu suất truyền động cao, kể cả với khi góc lệch giữa hai trục khá lớn.
5.1.2. Cấu tạo và nguyên lý làm việc
Phụ thuộc vào chức năng của từng vị trí mà cấu tạo và nguyên lý làm việc khác nhau.Vì vậy cấu tạo
và nguyên lý làm việc sẽ được trình bày cụ thể trong việc phân tích đặc điểm kết cấu các loại truyền động các đăng.
Ở đây, có thể phân loại sơ bộ chủ yếu theo công dụng của chúng như sau:
a) Theo công dụng trên ô tô máy kéo:
- Truyền động các-đăng chính: nối hộp số hoặc hộp phân phối với truyền lực chính
của cầu chủ động (thường có góc lệch trục các-đăng không quá 200).
- Truyền động các-đăng trong các cầu chủ động: nối truyền lực chính với các bánh
xe chủ động (có góc lệch trục đến 400 đối với các bánh xe chủ động dẫn hướng
hoặc < 200 đối với các bánh xe chủ động không dẫn hướng).
- Truyền động các-đăng trong các cụm phụ có góc lệch trục không quá 200.
b) Theo tính chất động học có:
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 143 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
- Loại khớp các-đăng khác tốc (thường với góc 200) là khớp các-đăng có tốc độ
góc của trục bị động 2 khác với tốc độ góc của trục chủ động 1.
- Loại khớp các-đăng đồng tốc (thường với góc 450) là khớp các-đăng có tốc độ
góc của trục bị động 2 luôn bằng tốc độ góc của trục chủ động 1.
c) Theo kết cấu của khớp các-đăng có:
- Loại khớp các-đăng khác tốc: gồm có loại cứng, loại mềm.
- Loại khớp các-đăng đồng tốc: gồm có loại đồng tốc kép, đồng tốc cam, đồng tốc
bi kiểu rãnh phân chia, đồng tốc bi kiểu đòn phân chia.
Để bảo đảm các yêu cầu nêu trên, thì cấu tạo chung truyền động các-đăng có thể bao
gồm hai khớp các-đăng khác tốc kiểu chữ thập với các giải pháp đồng tốc sao cho tốc độ góc
trục bị động của khớp các-đăng thứ hai bằng tốc độ góc trục chủ động của khớp các-đăng thứ nhất.
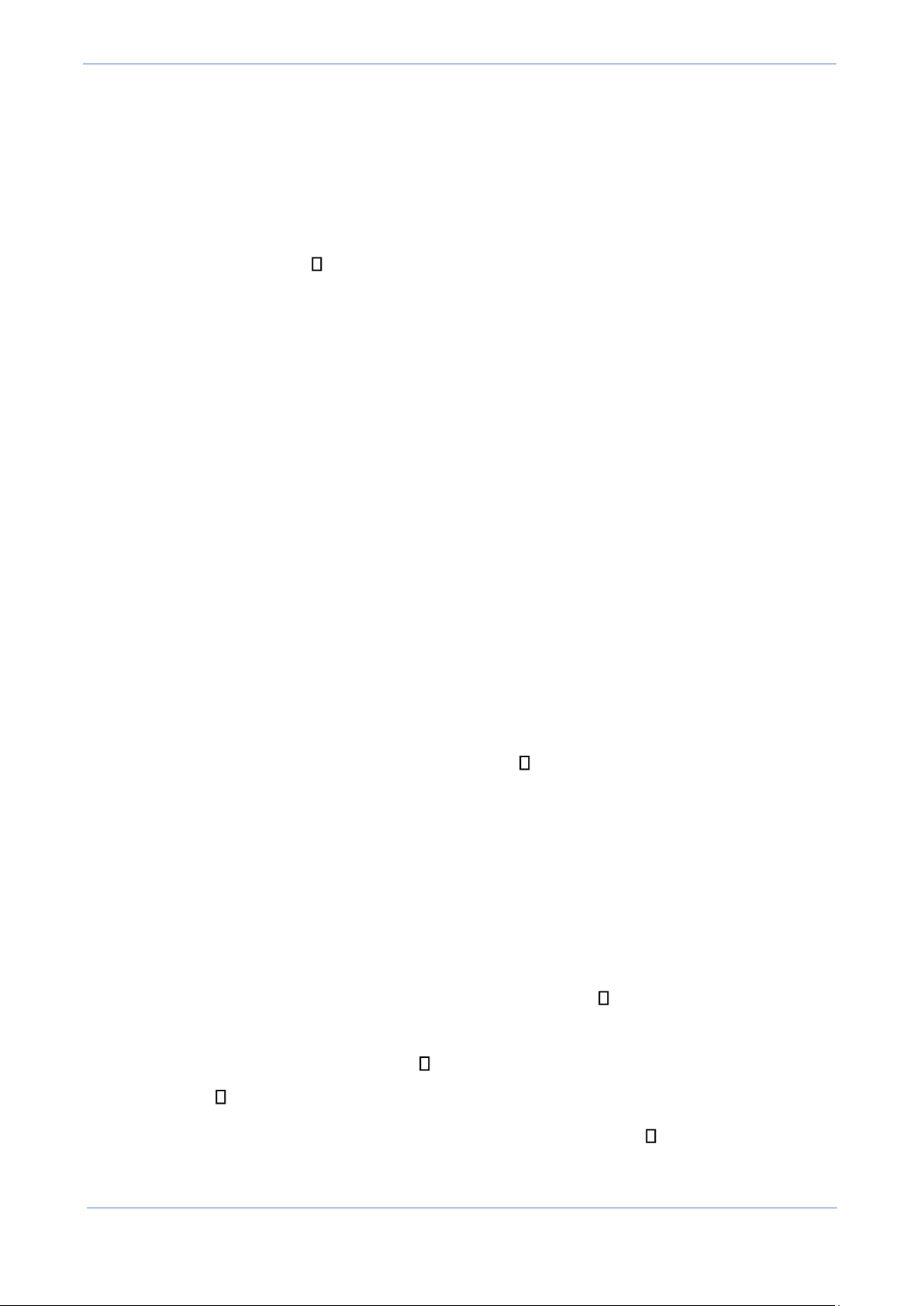
Hình 5.1: Kết cấu các đăng khác tốc kiểu chữ thập & khớp nối mềm.
Trên ô tô, truyền động các-đăng chính nối giữa hộp số với cầu chủ động thường là
truyền động các đăng khắc tốc chữ thập (xem hình 5.1). Truyền động các-đăng chữ thập
thường là loại chốt chữ thập có kết cấu cứng giữa chốt chữ thập (2) với các nạng (1) và (3).
Trục liên kết gữa hai khớp chữ thấp là trục rỗng (4) để không những giảm nhẹ khối lượng mà
còn nâng cao khả năng chống hiện tượng cộng hưởng với tần số quay nguy hiểm truyền xuống
từ động cơ (có thể xẫy ra khi tốc độ kích thích trùng với tần số riêng của trục các-đăng – xem thêm mục 5.3).
Đôi khi khoảng cách giữa các trục bánh xe lớn quá, làm cho trục các đăng quá dài, dẫn
đến tần số riêng của trục giảm thấp, dễ rơi vào vùng làm việc với tốc độ nguy hiểm cho trục
các-đăng. Lúc này trục các đăng phải dùng đến ba, bốn khớp nối và gối tựa trung gian để gảm
chiều dài trục giữa hai khớp nối, tránh hiện tượng cộng hưởng có thể xẫy ra khi tốc độ kích
thích trùng với tần số riêng của trục các-đăng (xem thêm mục 5.3).
Trên hình 5.1 cũng thể hiện cấu tạo & nguyên lý của khớp nối khác tốc kiểu “mềm”.
Theo đó, các nạng (6) và bu-lông (7) của nó cùng với bu-lông (9) của nạng thứ hai sẽ nối
TS.GVC. Lê Văn Tụy, ThS.GVC. Nguyễn Lê Châu Thành 144 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
“mềm” qua bích nối (10) có các lỗ chứa các khối cao-su mềm (8). Khớp nối mềm cho phép
giảm va đập khi truyền động tăng mô-men có tính đột ngột; tuy nhiên góc lệch hai trục của
khớp nối bị hạn chế bởi chính các ống cao-su.
Với những vị trí nối các cụm chi tiết máy có công dụng đặc biệt, thì cấu tạo chỉ dùng
một khớp các-đăng thì yêu cấu hớp nối này phải tự đông tốc (khớp các đăng đồng tốc hoặc
có khi phải cần cả hai khớp đồng tốc tuỳ theo yêu cầu của cụm truyền động).
Trên hình 5.1 còn chỉ ra khớp nối then hoa (5) cần thiết cho trục các-đăng chính; theo
đó cho phép thay đổi được chiều dài nhờ khớp trượt then hoa. Điều này nhằm bảo đảm cho
truyền động các-đăng làm việc bình thường khi cầu chủ động có sự dịch chuyển tương đối so
với khung xe thông qua bộ phần đàn hồi của hệ thống treo.
5.2. ĐẶC ĐIỂM KẾT CẤU VÀ XÁC ĐỊNH CÁC THÔNG SỐ CƠ BẢN
5.2.1. Truyền động các-đăng khác tốc
Kết cấu các đăng khác tốc kiểu chữ thập dùng khá phổ biến trên ô tô như chỉ ra trên hình 5.1. Kết
cấu các đăng chữ thập có kết cấu đơn giản mà vững chắc, làm việc tin cậy cao, dễ chăm sóc, bảo
dưỡng và sửa chữa; bởi vì hư hỏng chủ yếu là mòn rơ các ổ bi đũa nối kết giữa chốt chữ thập và lỗ
của các nạng; việc này có thể thay dễ dàng.
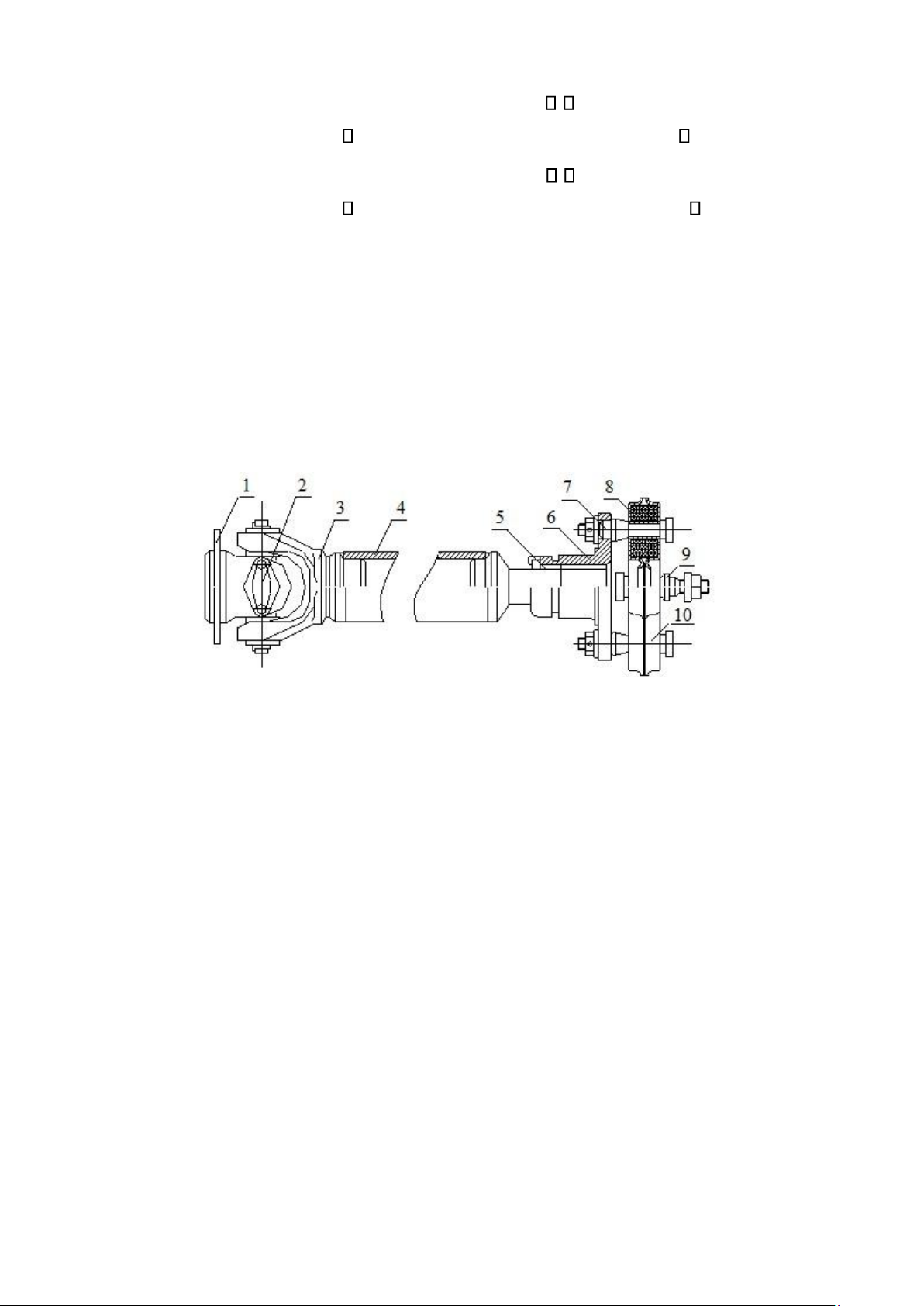
Động học của cơ cấu các-đăng khác tốc A 1 B 2
Hình H5-3: Sơ đồ nguyên lý truyền động các-đăng khác tốc
Xét điểm A nằm trên đầu chốt đứng của chữ thập (hình H5-3). Khi trục (1) quay, điểm
A vẽ nên vòng tròn bán kính OA trong mặt phẳng thẳng đứng mp(d). Điểm B tương ứng nằm
trên đầu chốt kia (tạm gọi là chốt ngang) của chữ thập khi ấy sẽ vẽ nên vòng tròn nằm trong
mặt phẳng nghiêng lập với mặt đứng mp(d) một góc . Đường thẳng qua tâm O của chốt chữ
thập và vuông góc với mặt phẳng chứa hai tâm trục của hai nạng chính là giao tuyến của hai
mặt phẳng chuyển dịch của hai chốt chữ thập.
Như vậy, khi các trục quay thì hai chốt chữ thập lần lượt lắc quanh trục kia trong góc
giới hạn . Sau mỗi vòng quay của chốt thứ nhất, sẽ có hai lần chốt thứ hai thuộc mặt phẳng
của chốt thứ nhất; và ngược lại cũng có hai lần chốt thứ nhất thuộc mặt phẳng của chốt thứ
hai. Do đó, có hiện tượng quay không đều của trục nạng thứ hai (2) khi trục nạng thứ nhất (1) quay đều.
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 145 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
Theo giáo trình nguyên lý máy, với bất kỳ vị trí nào của các trục, ta có biểu thức quan
hệ động học của các trục nạng các-đăng khác tốc chữ thập:
tg 1 tg 2.cos . (5.1)
Trong đó: 1, 2 : Góc quay của trục chủ động và trục bị động của các-đăng;
: Góc lệc trục của hai trục nạng các-đăng.
Lấy đạo hàm theo thời gian hai vế của phương trình (5.1) ta được: d 1 1 d 2 1 . 2
. 2 .cos . dt cos 1 dt cos 2 (5.2)
Sau khi biến đổi lượng giác, ta được quan hệ vận tốc góc của hai trục: 2 cos 2 2 2 (5.3) 1 sin 1 cos .cos 1
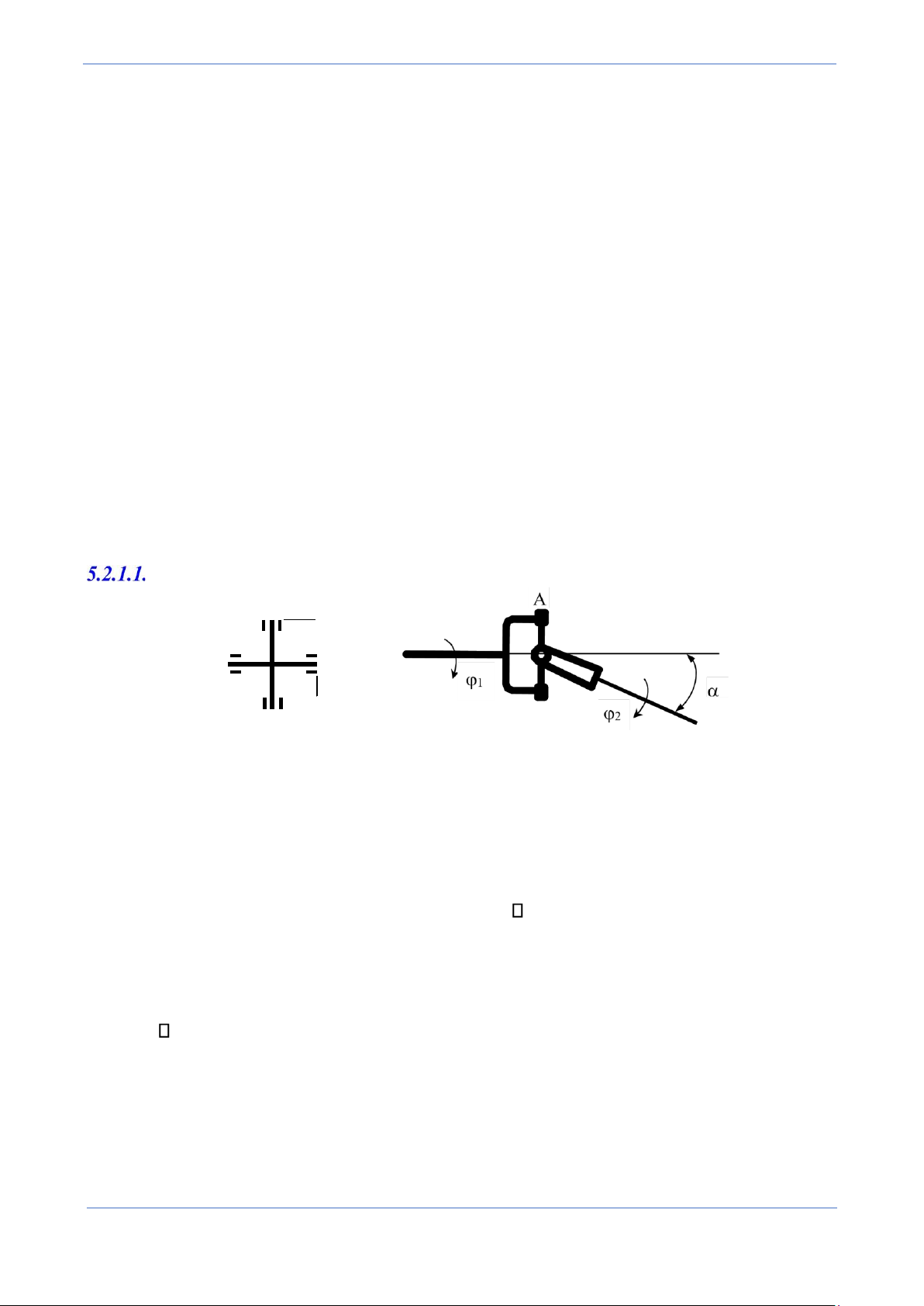
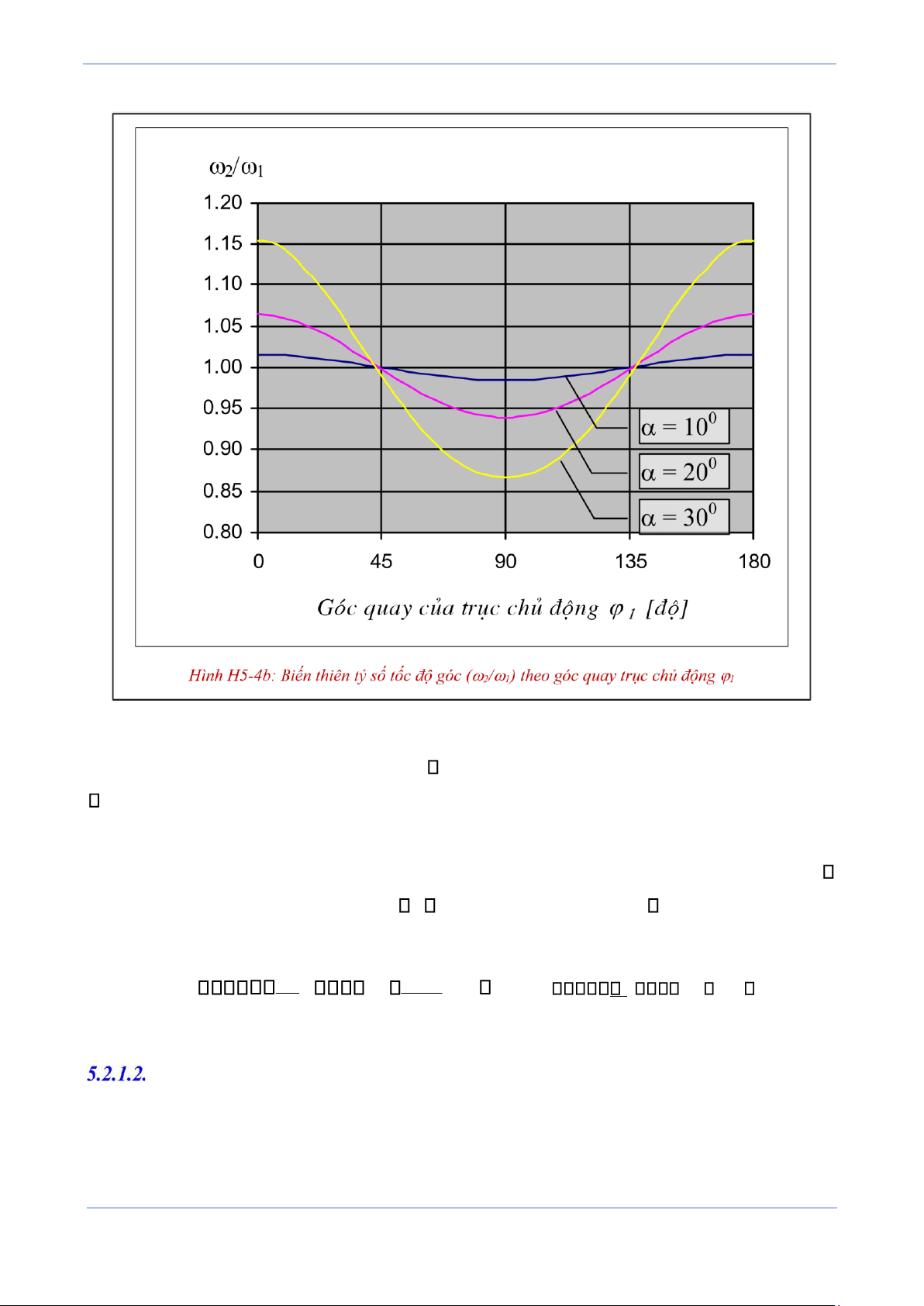
Đồ thị trên hình H5-4a biểu thị sự thay đổi hiệu số tốc góc quay ( 1- 2) sau nửa vòng
quay của trục chủ động 1 ứng với các gọc lệch trục khác nhau 100, 200, 300. Sau nửa vòng
quay, trục bị động (2) một lần vượt nhanh hơn trục chủ động (1) và một lần chậm hơn trục
(1). Đồ thị trên hình H5-4b biểu thị sự thay đổi tỷ số tốc độ góc ( 2/ 1) sau nửa vòng quay
của trục chủ động 1 ứng với các gọc lệch trục tương ứng.
TS.GVC. Lê Văn Tụy, ThS.GVC. Nguyễn Lê Châu Thành 146 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ Từ đồ thị, ta thấy:
Tốc độ góc của trục bị động 2 luôn luôn khác với tốc độ góc của trục chủ động
1 (sau nửa vòng quay, nó có hai lần đạt giá trị bằng tốc độ góc của trục chủ động). Nói cách
khác, khi trục chủ động quay đều, trục bị động (2) vẫn quay không đều.
Sự quay không đều của trục bị động so với trục chủ động càng tăng khi góc
càng lớn. Biên độ dao động của tỷ số ( 2/ 1) phụ thuộc vào góc lệch như sau: 22 max cos1 và 22 min cos (5.4)
Các giải pháp làm đồng đều tốc độ cho hệ các-đăng khác tốc:
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 147 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
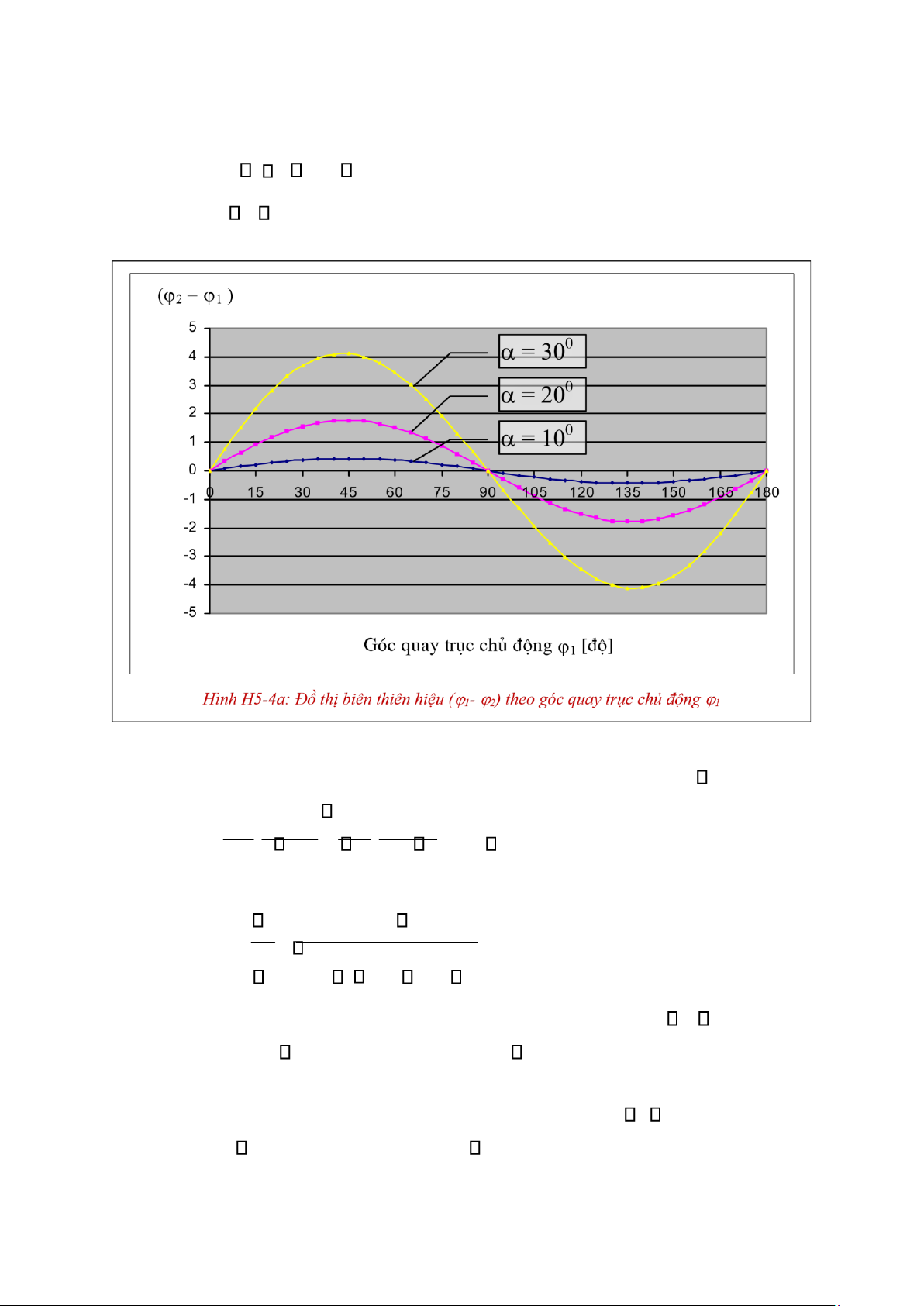
5.2.1.2.1. Hệ các-đăng kép
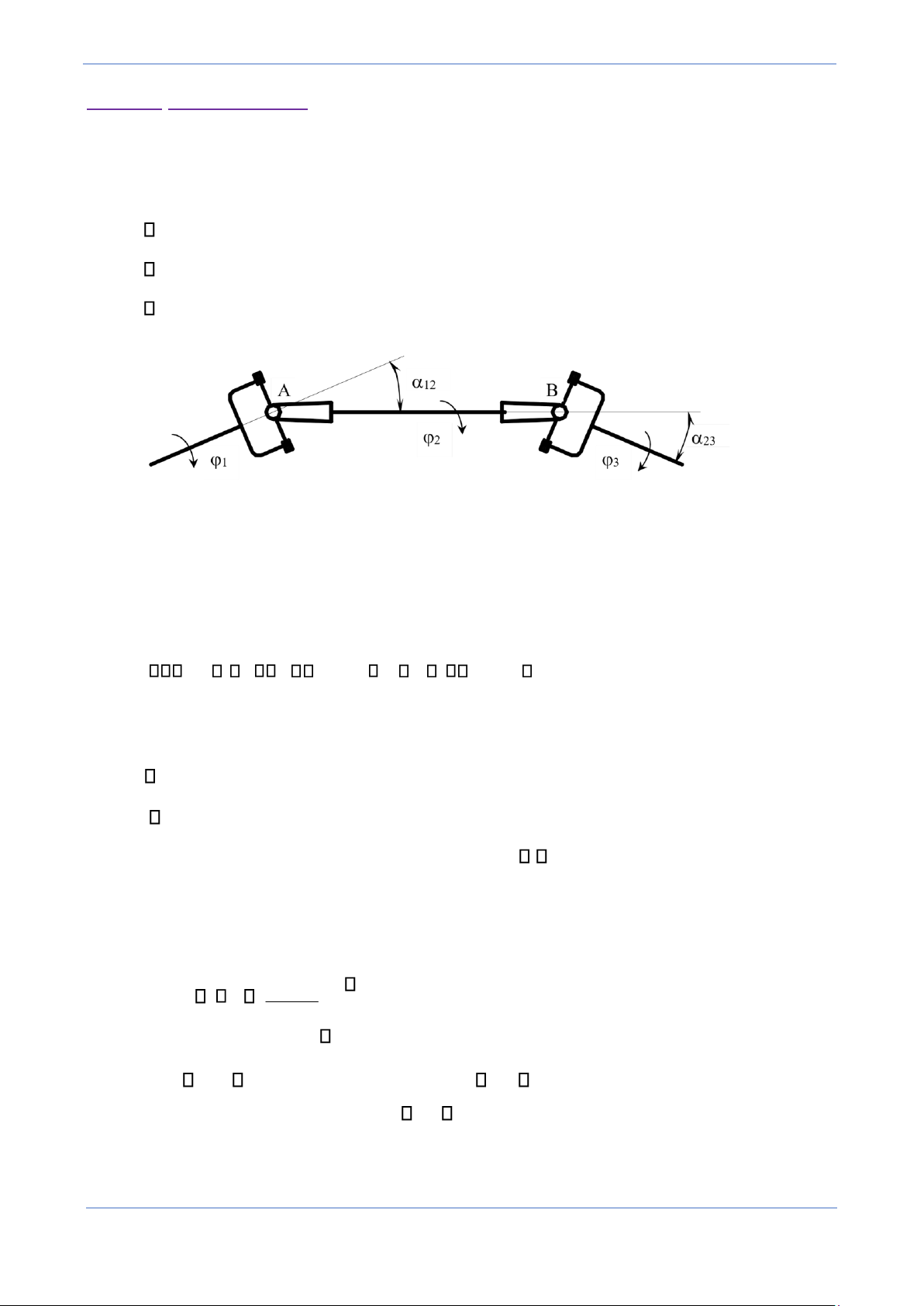
Một hệ thống truyền động các-đăng gồm tổ hợp hai khớp các-đăng khác tốc và ba trục
(hình H5-5) trong đó trục bị động của khớp các-đăng thứ nhất (A) đồng thời là trục chủ động
của khớp các-đăng thứ hai (B). Góc quay tương ứng của các trục được ký hiệu như sau: 1
: Góc quay của trục thứ nhất (1); 2
: Góc quay của trục thứ hai (2); 3
: Góc quay của trục thứ ba (3);
Hình H5-5: Sơ đồ hệ các-đăng kép gồm hai khớp khác tốc
Sử dụng biểu thức (5.1) lần lượt áp dụng cho khớp các-đăng thứ nhất (1-A-2) và khớp
các-đăng thứ hai (2-B-3): tgtg ( 1 2 tg /22.)cos tg 12( 3 / 2).cos 23 (5.5*) Trong đó: 12
: Góc lệch trục giữa trục thứ nhất (1) và trục thứ hai (2) của khớp (A);
23 : Góc lệch trục giữa trục thứ hai (2) và trục thứ ba (3) của khớp (B);
(*) : Đối với khớp các-đăng (B) có sự lệch pha /2 so với khớp thứ nhất khi xét cùng
hệ toạ độ chung với khớp (A).
Từ (5.5*) suy ra quan hệ góc quay trục thứ ba (3) so với trục thứ nhất (1): cos tg 23 3 tg 1. (5.6) cos 12
Nếu 32 = 12 thì chúng ta luôn luôn có 3 = 1; nghĩa là có sự đồng đều tốc độ của
trục thứ ba (3) so với trục thứ nhất (1): 3 = 1. Đây là giải pháp đơn giản và hữu hiệu để làm
TS.GVC. Lê Văn Tụy, ThS.GVC. Nguyễn Lê Châu Thành 148 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
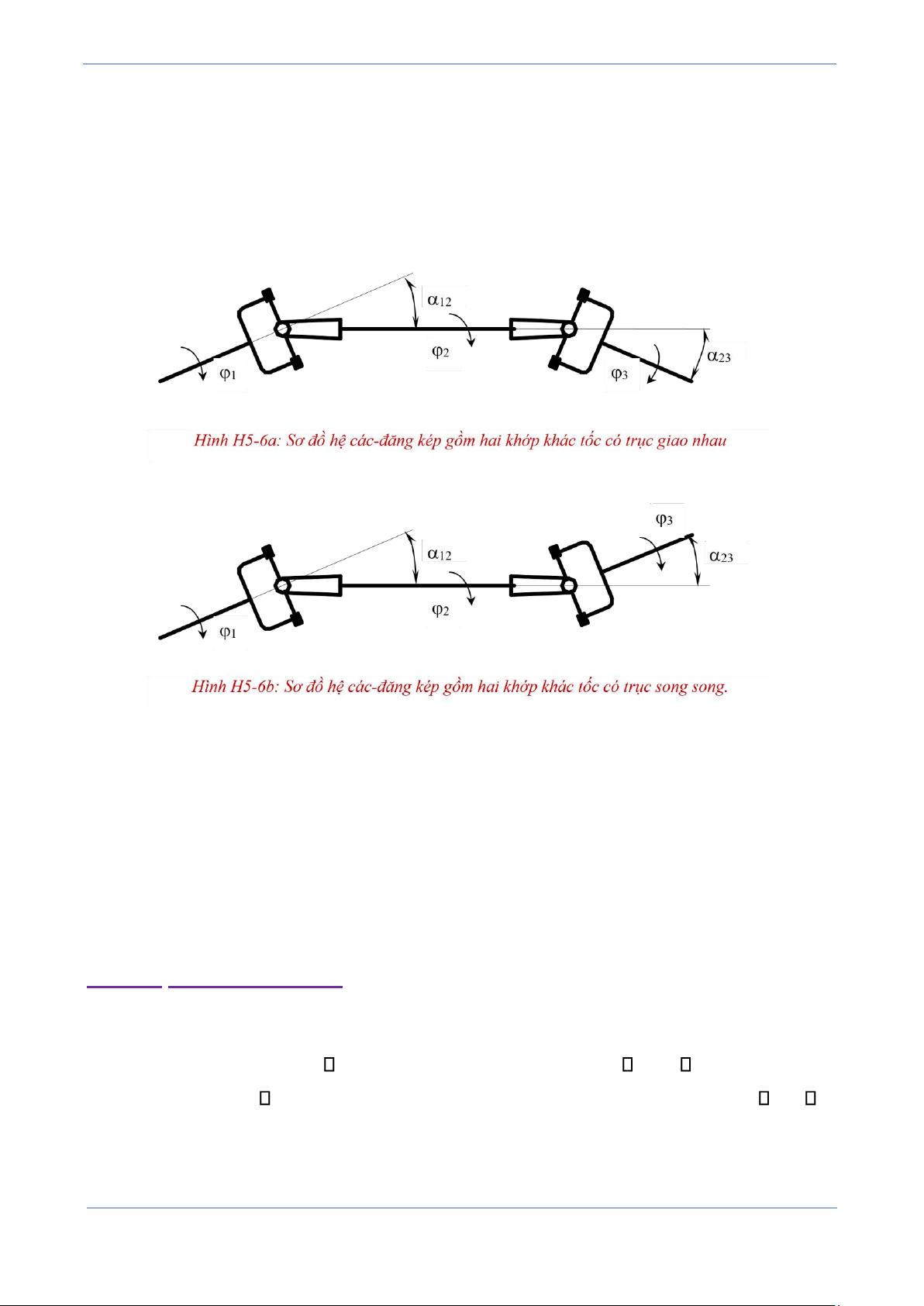
đồng đều tốc độ của hệ thống truyền động các-đăng gồm hai khớp khác tốc và ba trục như trên hình H5-6a, b.
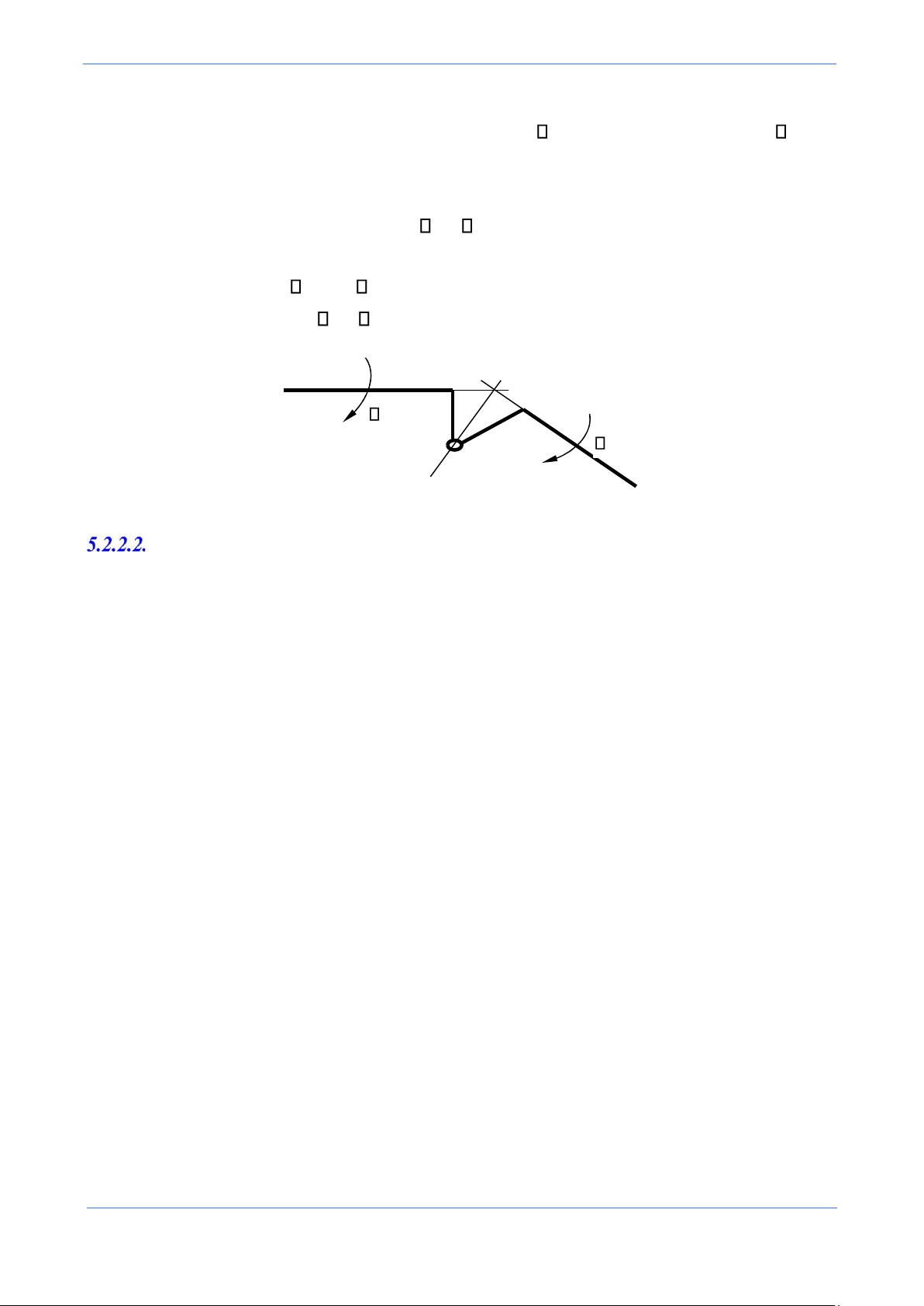
Giải pháp trên hình H5-6a (trục thứ nhất và trục thứ ba giao nhau trên đường trung trực
của trục trung gian) được sử dụng trong các trường hợp truyền động các cụm phụ trên xe có
đường tâm trục của trục dần và trục bị dẫn là cố định (như trục nối vô lăng lái với cơ cấu lái
của hệ thống lái ô tô).
Giải pháp trên hình H5-6b (trục thứ nhất và trục thứ ba song song với nhau) được sử
dụng chủ yếu trong hệ thống truyền lực ô tô như nối hộp số với truyền lực chính của cầu chủ
động, nối truyền lực chính với bánh xe chủ động ở hệ thống treo độc lập. Giải pháp này bảo
đảm cho các góc lệch các-đăng luôn bằng nhau trong bất kỳ dao động nào của các bánh xe
chủ động (nhờ tính chất góc so le trong của hai trục song song).
Để giảm góc lệch trục của khớp các-đăng, có thể bố trí cụm động cơ, ly hợp và hộp số
nghiêng xuống về phía sau; trong khi đó cụm cầu chủ động có đường tâm trục nối với các
đăng được bố trí nghiêng lên về phía trước song song trục hộp số.
5.2.1.2.2. Cơ cấu các-đăng kép
Cơ cấu các-đăng kép là biến thể đặc biệt của hệ hai khớp các-đăng khác tốc được bố
trí theo giải pháp trục giao nhau (sơ đồ hình H5-6a); trong đó trục các-đăng trung gian (2)
được thu ngắn hoàn toàn (l2 0). Để bảo đảm cho các góc lệch 12 và 23 luôn luôn bằng
nhau với mọi góc lệc , người ta phải thiết kế thêm một cơ cấu chỉnh tâm để duy trì 12 = 23.
Cơ cấu các-đăng kép không được sử dụng trên ô tô do kết cấu kồng kềnh so với hai phương án đã nêu.
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 149 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
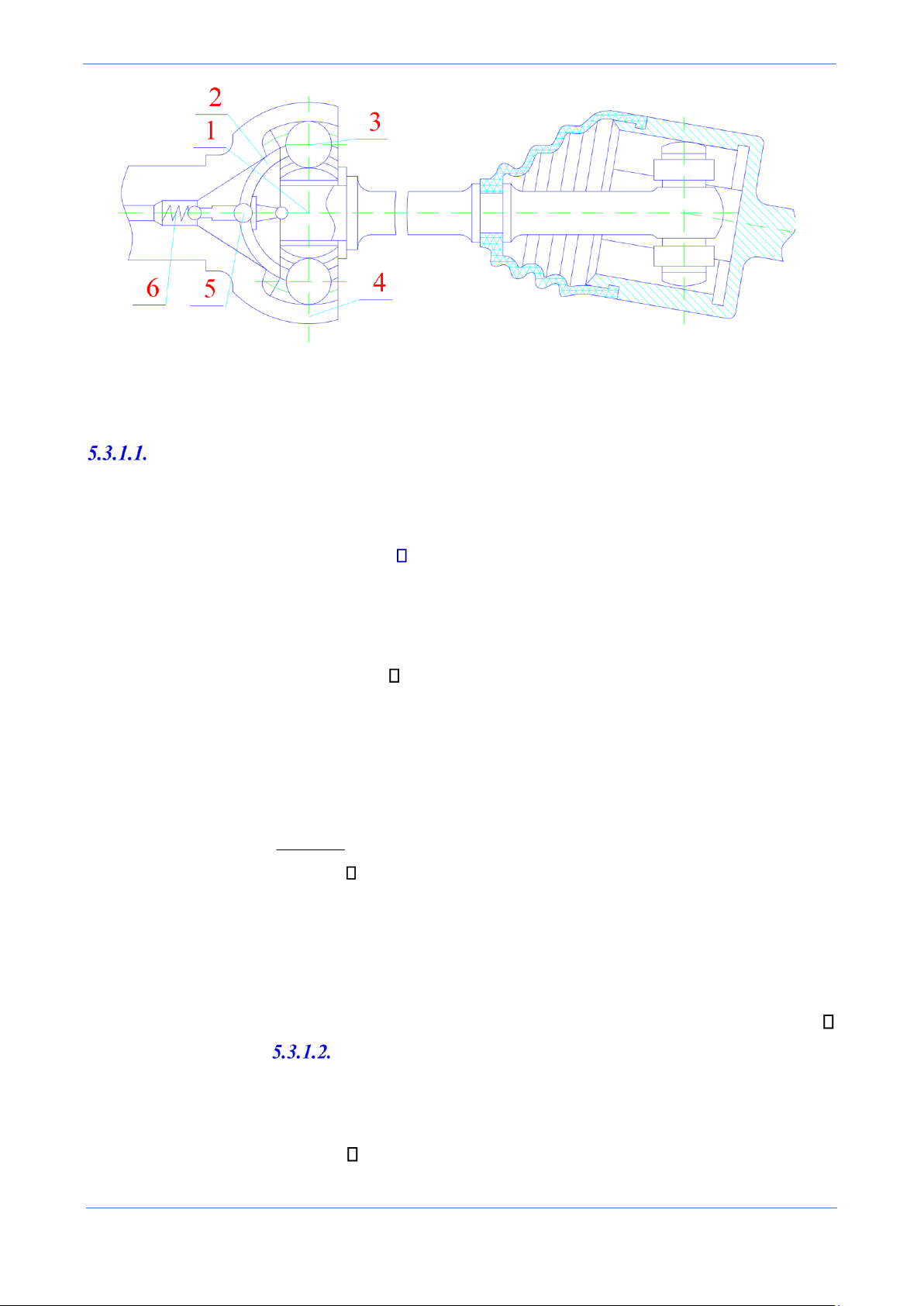
5.2.1.2.3. Đặc điểm kết cấu
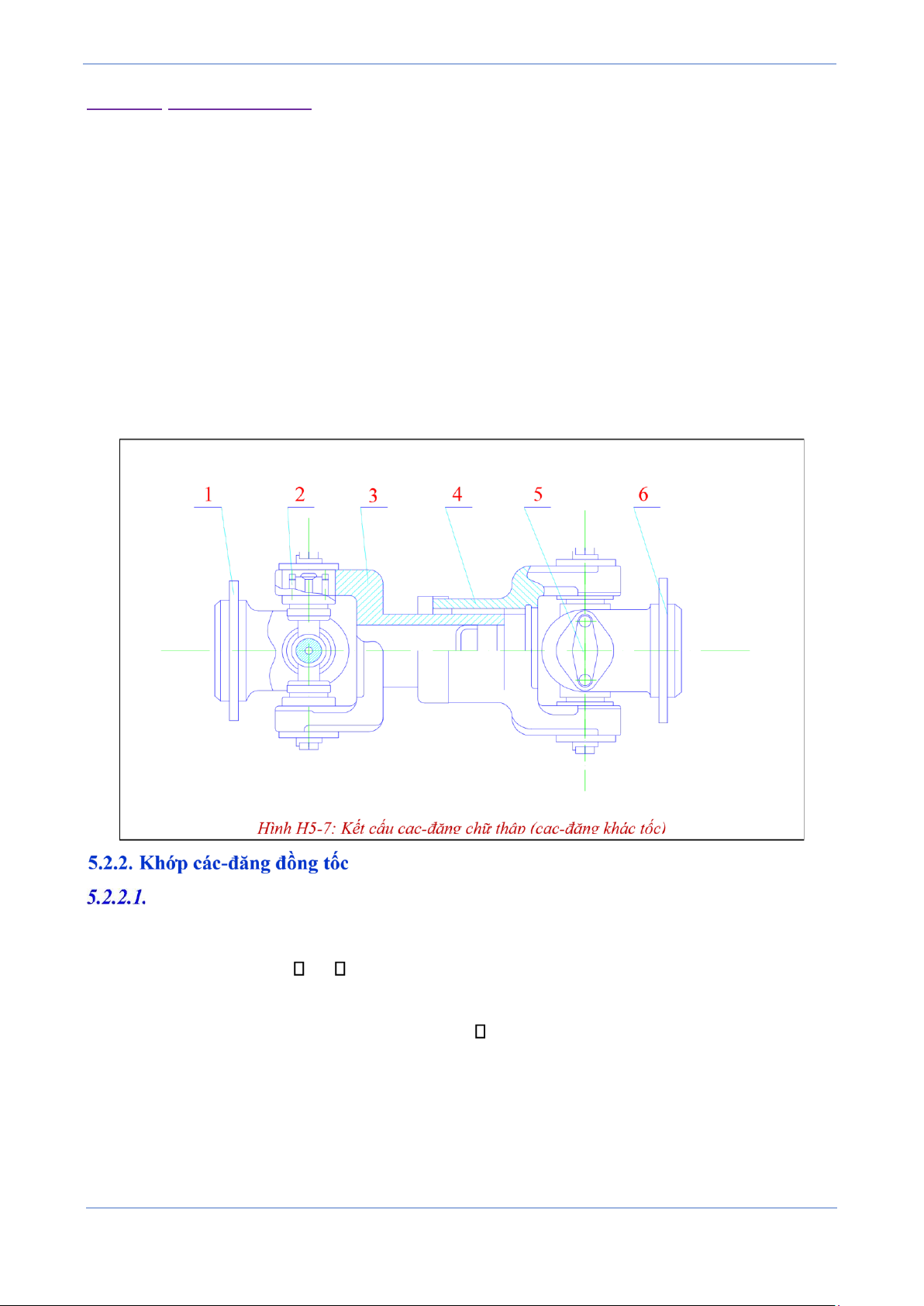
Truyền động các-đăng với kiểu các-đăng khác tốc có cấu tạo và kết cấu chi tiết khá
đơn giản: gồm bích nối (1) để nối với trục thứ cấp của hộp số, nạng các-đăng chủ động (3)
quay trong các ổ bi kim (2). Chốt chữ thập cùng với nạng các-đăng bị động (5) có bích nối
(6) để lắp ghép trục sơ cấp của truyền lực chính của cầu chủ động (cụm chi tiết 5 trên hình H5-1).
Kết cấu trục các-đăng được chế tạo rỗng nhằm giảm trọng lượng, giảm tải trọng phụ do mô
men quán tính gây ra; đồng thời tăng được tần số dao động riêng, dễ dàng tránh được hiện
tượng cộng hưởng đối với trục các-đăng. Trục các-đăng phải được cân bằng tốt sau chế tạo
để tránh rung và giảm tải trọng phụ đối với các khớp bản lề của chữ thập. Để bảo đảm cho
trục các-đăng thay đổi được chiều dài (khoảng cách giữa hai khớp), phải có một đầu trục nối
với nạng các-đăng bằng mối ghép then hoa.
Động học khớp các-đăng đồng tốc
Khớp nối các-đăng có tốc độ trục thứ cấp luôn luôn bằng tốc độ trục sơ cấp gọi là
khớp các-đăng đồng tốc ( 2 = 1). Khớp các-đăng đồng tốc được dùng để truyền động cho
cầu vừa chủ động vừa dẫn hướng (nối truyền lực chính với bánh xe chủ động dẫn hướng).
Vì góc quay các bánh xe dẫn hướng lớn (từ 350 450), nên góc lệch trục của khớp các-đăng
đồng tốc trong trường hợp này cũng phải lớn.
Nguyên tắc cơ bản của khớp các-đăng đồng tốc là điểm truyền lực luôn luôn nằm trên mặt
phảng phân giác của góc tạo bởi hai trục (dựa trên nguyên tắc làm việc của cặp bánh răng
TS.GVC. Lê Văn Tụy, ThS.GVC. Nguyễn Lê Châu Thành 150 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
nón ăn khớp có tỷ số truyền bằng một; nghĩa là các bán kính vòng lăn bằng nhau R1 = R2.
Điều khác ở đây là với các đăng đồng tốc góc lệch trục có thể thay đổi bất kỳ, từ 0 450).
Vì điểm tiếp xúc P truyền lực từ trục chủ động sang trục bị động luôn nằm trong mặt phẳng
phân giác (hình H5-8) nên khoảng cách từ P đến hai trục luôn bằng nhau (R1 = R2). Do đó,
vận tốc góc của hai trục phải bằng nhau ( 1 = 2).
Ta có tốc độ tịnh tiến của điểm tiếp xúc chung P: VP1 = VP2 hay 1.R1 = 2.R2 Vì R1 = R2 nên 1 = 2 O 1 2 P
Hình H - 8: Sơ đ ồ nguyên lý các - đăng đ ồ ng t ố c
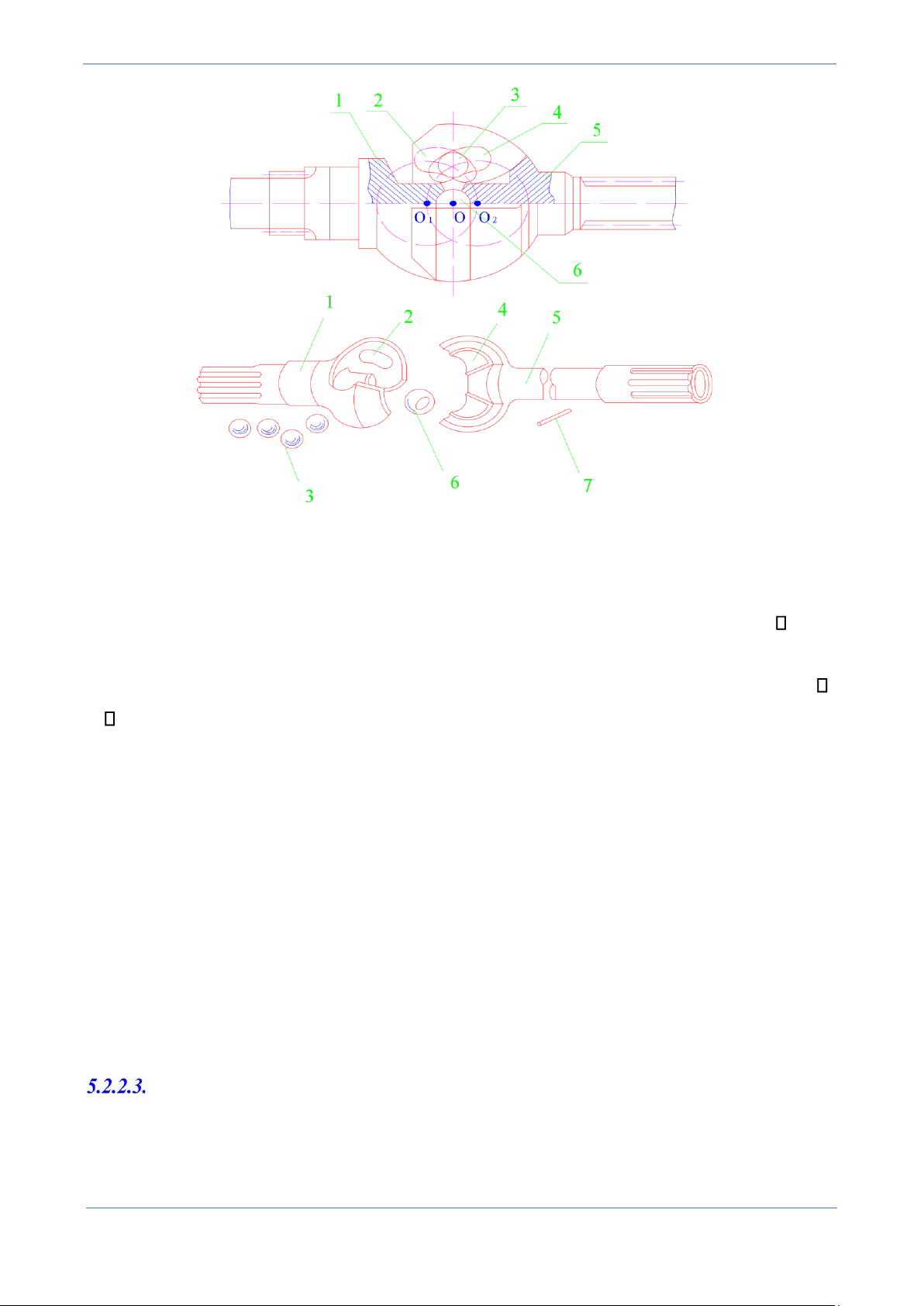
Đặc điểm kết cấu các-đăng đồng tốc bi (kiểu Weiss)
Đặc điểm kết cấu khớp nối các-đăng đồng tốc bi kiểu Weiss được chỉ ra trên hình H59a.
Lực từ nạng (1) truyền đến nạng (5) thông qua bốn viên bi (3). Các viên bi chuyển động trong
các rãnh cong (2) và (4) nằm đối xứng trên các nạng (1) và (5) và nằm trong các mặt phẳng vuông góc với nhau.
Đường tâm của các rãnh cong là những vòng tròn có bán kính bằng nhau và có tâm O1,
O2 nằm trên các đường tâm của hai nạng tương ứng. Các tâm O1, O2 cách đều giao điểm O của hai trục.
Khi các trục quay (1) và (5) quay để truyền lực cho nhau, đường tâm của các rãnh (2)
và (4) sẽ tạo thành hai mặt cầu bằng nhau. Hai mặt cầu này cắt nhau theo giao tuyến n-n cũng
là một đường tròn. Đường tròn này chính là quỹ đạo chuyển động của các viên bi (3).
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 151 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
Hình H5-9a: Truyền động các đăng đồng tốc bi (Weiss)
Do các viên bi nằm trên giao tuyến n-n của hai mặt cầu bằng nhau với tâm O1, O2 cách
đều giao điểm của hai trục O, nên các viên bi luôn cách đều hai trục với mọi góc lệch trong
giới hạn cho phép của nó. Hay nói cách khác: các viên bi luôn luôn nằm trong mặt phẳng
phân giác của góc tạo bởi hai trục. Vì vậy tốc độ góc của hai trục luôn luôn bằng nhau ( 1 = 2).
Để bảo đảm hai tâm O1, O2 của hai mặt cầu trên hai nạng luôn cách đều giao điểm O của hai
trục nạng, phải dùng một viên bi định vị (6) đặt vào giữa hai trục nạng. Để dễ lắp viên bi này
và định vị nó, phải dùng thêm chốt định vị (7).
Do các-đăng đồng tốc bi làm việc theo nguyên lý tiếp xúc nên các viên bi truyền lực và các
nạng các-đăng đều phải làm bằng thép hợp kim tốt; đồng thời phải xử lý các bề mặt tiếp xúc
để chống mòn. (Ví dụ thép hợp kim của Ni-ken và Mô-lip-den có thành phần các-bon thấp và
phải được xê-măng-tit hoá bề mặt).
Các-đăng đồng tốc bi kiểu Weiss được sử dụng phổ biến ở cầu vừa chủ động vừa dẫn
hướng trên hầu hết các loại xe có dầm cầu liền (hệ thống treo phụ thuộc). Các-đăng đồng tốc
bi kiểu Weiss còn được gọi là các-đăng đồng tốc bi kiểu rãnh vì các viên bi được giữ ở mặt
phẳng phân giác nhờ các rãnh đặc biệt như đã nêu trên.
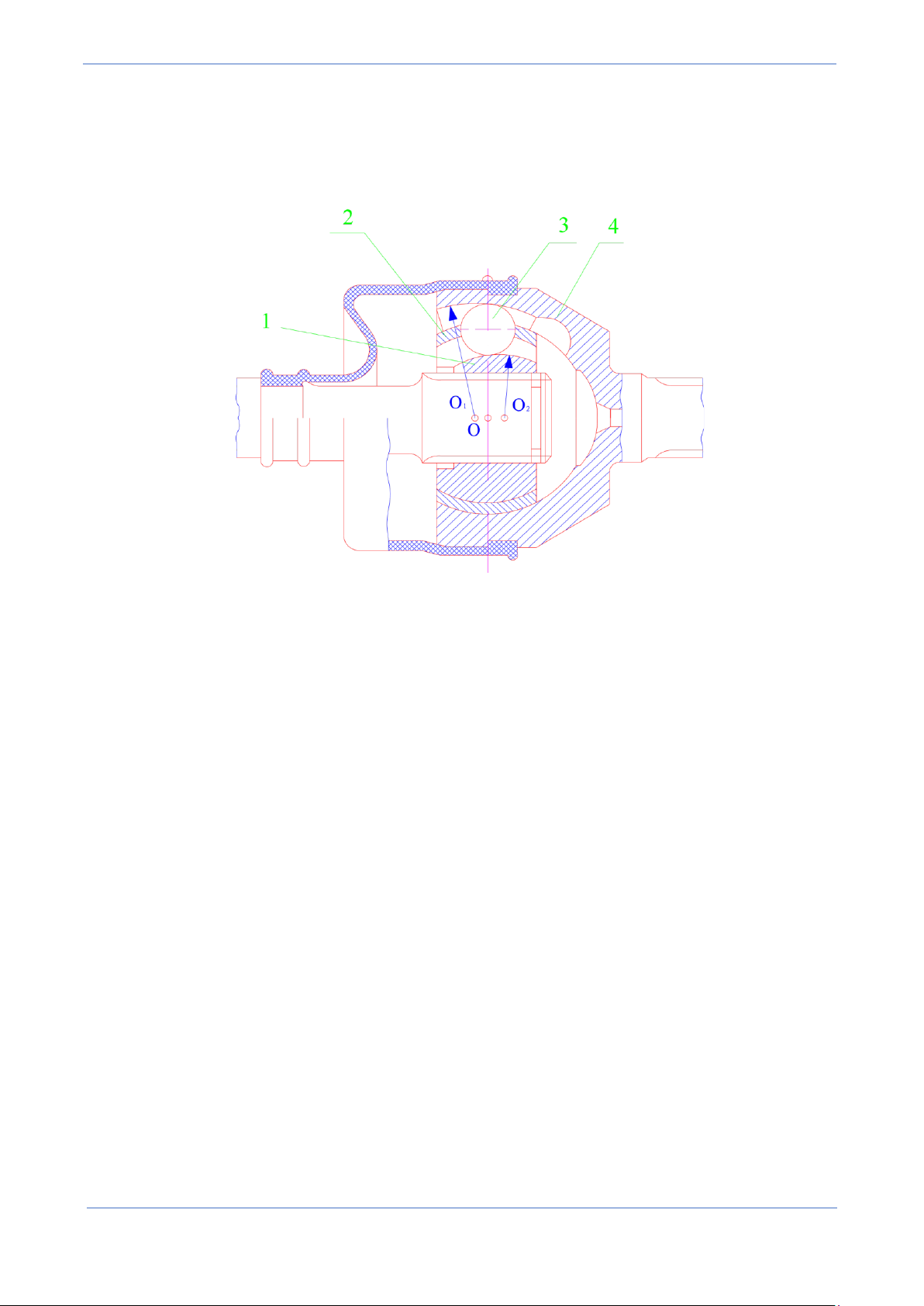
Đặc điểm kết cấu các-đăng đồng tốc bi (kiểu Rzepp)
Khớp nối các-đăng đồng tốc bi kiểu Rzepp cũng làm việc theo nguyên lý tiếp xúc thông
qua các viên bi truyền lực. Tuy vậy, điều khác ở đây là chúng có sáu viên bi truyền lực đồng
TS.GVC. Lê Văn Tụy, ThS.GVC. Nguyễn Lê Châu Thành 152 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
thời (trong khi đó kiểu Weiss chỉ có bốn viên, và mỗi chiều quay chỉ truyền theo hai viên bi
đối xứng). Nguyên lý định vị các viên bi trong mặt phẳng phân giác (của góc lập bởi hai trục)
dựa vào một đòn chia đặc biệt nên khớp các-đăng đồng tốc bi kiểu Rzepp còn được gọi là
khớp các-đăng đồng tốc bi kiểu đòn.
Hình H5-9b: Truyền động các đăng đồng tốc bi kiểu Rzepp
Đặc điểm kết cấu khớp nối các-đăng đồng tốc bi kiểu đòn được chỉ ra trên hình H5-9b và H5-9c.
Sáu viên bi (3) được đặt trong một vành định vị (2) và dịch chuyển trong sáu rãnh cong
(4). Các rãnh cong được khoét trên mặt hình cầu bên trong của võ (4) ở một đầu trục và các
rãnh cong khác được gia công trên mặt cầu tạo ra vành khía (1). Các rãnh cong (trong và
ngoài) có tâm O1 và O2 dịch chuyển quanh một tâm chung O cùng thuộc một mặt cầu chung
có tâm cầu là điểm của hai trục nạng.
Vành (2) giữ cho các viên bi không bị kẹt, không bị rời ra và bảo đảm các viên bi luôn
nằm trong mặt phẳng phân giác của góc lập bởi hai trục với bất kỳ chuyển dịch nào của các
trục các-đăng. Cơ cấu quan trọng quyết định duy trì vành (2) và do đó các viên bi luôn nằm
trong mặt phẳng phân giác của góc lập bởi hai trục chính là đòn chia (5). Các mặt cầu luôn
luôn được duy trì cách đều tâm chung O nhờ lò xo tỳ (6) và đòn chia (5). Đồng tốc kiểu này
còn được gọi là đồng tốc bi kiểu đòn chia.
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 153 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
Hình H5-9c: Truyền động các đăng đồng tốc bi (kiểu Rzepp)
5.3. Xác định các thông số cơ bản của truyền động các-đăng
Các đăng khác tốc chữ thập
Kích thước nạng các đăng, chốt chữ thập cũng như ổ bi kim được xác định theo điều
kiện bền trên cơ sở mômen truyền lớn nhất tác dụng lên trục: Mmax = Memaxih1ip1 (5.1) Trong đó:
Memax : Mômen cực đại của động cơ [Nm]; ih1 : Tỷ
số truyền số thấp của hộp số; ih1 : Tỷ số truyền số
thấp của hộp số phụ (nếu có); : Hiệu suất tổng của hộp số.
Ngoài điều kiện bền, kích thước của chúng còn được tính toán chống mòn và chịu
nhiệt độ trong điều kiện bôi trơn hạn chế đối với các bề mặt ma sát dưới tác dụng của lực vòng P: P = M max (5.2) 2RCos Trong đó:
Mmax : Mômen lớn nhất truyền đến khớp các đăng [Nm];
2R : Khoảng cách các điểm đặc lực trên hai chốt chữ thập [m];
: Góc lệch của trục các căng bị dẫn so với trục dẫn.
Công ma sát trong khớp các đăng xẫy ra khi dịch chuyển chốt chữ thập đi một góc
dưới tác dụng của lực
Căc đăng đồng tốc
Động học của các-đăng đồng tốc kiểu đòn chia Rzepp được quyết định bới các kích
thước của đòn chia như sau:
Từ hình vẽ, với góc lệch bất kỳ, ta có:
TS.GVC. Lê Văn Tụy, ThS.GVC. Nguyễn Lê Châu Thành 154 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ DEAC a b tg b DE EO
với EO EC CO a.cos m.cos (4-??) AC m.sin b m. sin Suy ra: tg a b m.cos a.cos
Mặc khác, ta có: (a+b).sin = m.sin , nên ta có: b m. sin tg a b m.cos a. 1 m.sin 2 a b
Nếu đặt K1 = a/b và K2 = m/b thì ta có: sin K2. tg K1 1 K2.cos K1. 1 K2. Ksin1 1 2
Như vậy, ta có thể chọn các tỷ số K1 = a/b và K2 = m/b sao cho góc xấp xỉ góc /2
thì tâm mặt cầu trung gian của đòn chia (6) gần như thuộc mặt phẳng phân giác của góc kẹp
bởi hai trục (góc lệch trục ), do đó các viên bi có thể xem gần đúng nằm trong mặt phẳng
phân giác của góc lập bởi hai trục. Và do vậy, tốc độ góc 1, 2 của hai trục của khớp cácđăng
kiểu Rzepp có thể xem bằng nhau với mọi góc lệch trục .
Chẳng hạn, bằng phương pháp tính xấp xỉ, với tỷ K1 = 0,2 và K2 = 0,28 thì góc
/2 với mọi góc lệch trục thay đổi trong phạm vi từ 00 đến 400 (sai lệch tương đối lớn nhất
không quá 0,015 - tức 1,5%). Khi góc lệch trục đến 440 thì sai lệch của so với /2 cũng
chỉ đến 0,0195 - tức 1,95%).
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 155 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
Chiều dài trục truyền động các-đăng
Đối với trục truyền các-đăng, do kích thước khá dài nên rất mảnh về độ cứng. Hay nói
cách khác, với trục các-đăng có chiều dài khá lớn so với đường kính, nên thường có tần số
riêng thấp, dễ rơi vào vùng làm việc với số vòng quay ứng với tần số kích thích từ động cơ
truyền đến; có thể gây công hưởng đối với trục các-đăng. Vì vậy, kích thước trục các đăng nói
chung và chiều dài nói riêng phải được xác định theo điều kiện số vòng quay mà tại đó có thể xẩy ra công hưởng.
Hình xx Truyền động các đăng đồng tốc bi (kiểu Rzepp)
Trên hình xx., minh họa mô hình động lực học để tính toán xác định số vòng quay tới
hạn (còn gọi là số vòng quay nguy hiểm) mà tại đó có thể xẫy ra hiện tượng công hưởng gây
nguy hiểm cho trục các-đăng.
Khi chế tạo trục các đăng, do sai số của việc cân bằng chưa chính xác, tồn tại sự lệch
tâm của khối lượng trục.
Giả sử khối tâm của trục các-đăng bị lệch tâm một đoạn nhỏ e, khi trục quay sẽ xuất
hiện lực ly tâm. Dưới tác dụng của lực ly tâm, trục sẽ bị võng do hai gối trục tương đối xa
nhau; điều đó càng làm khối tâm đã lệch càng bị lệch tâm (xem hình xx).
Ở trạng thái cân bằng động, lực ly tâm Flt sẽ được xác định bằng:
Flt mcd .(y e). 2 (x.1)
Trong đó: mcd là khối lượng của trục các đăng đã bị lệc tâm và đặt tại trong tâm của trục;
ở giữa chiều dài trục và cách đường tâm của trục một khoảng lệch e ; y là độ võng thêm của
trục dưới tác dụng của lực ly tâm ; là tốc độ góc quay của trục các-đăng.
Lưu ý rằng, ở trạng thái cân bằng, lực ly tâm được cân bằng vói lực đàn hồi ngang của
trục. Với kích thước xác định, lực đàn hồi ngang Fy tỷ lệ thuận với độ võng y của trục [3]; nghĩa là: Fy = C.y (x.2)
TS.GVC. Lê Văn Tụy, ThS.GVC. Nguyễn Lê Châu Thành 156 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
Ở đây: C là độ cứng uốn của trục, C [N/m].
Cân bằng hai phương trình trên, ta suy ra độ võng tại trạng thái cân bằng ứng với tốc độ
vận hành của trục như sau: y Cm cdm.ecd. 22 (x.3)
Từ biểu thức cho thấy rằng, khi C = m 2 cd
thì độ võng y tiến đến giá trị lớn vô cùng (y
--> ). Nghĩa là trục bị cộng hưởng, trục sẽ bị gãy nếu không nhanh chóng vượt qua trạng
thái ứng với tốc độ này! Tốc độ ứng với trạng thái công hưởng được gọi là tốc độ tới hạn hay
còn gọi là số vòng quay nguy hiểm (khi tính theo vòng/phút).
Như vậy, ta có số vòng quay nguy hiểm của trụ các-đăng được xác định bằng: 30 30 C
t C hay nt t (x.3) mcd mcd
Trục các đăng truyền mô-men xoắn, nên thường là trục rỗng. Vì vậy khối lượng trục
các-đăng mcd có thể được xác định bằng: D2 d2 mcd Lcd . (x.3) 4
Trong đó: D, d lần lượt là đường kính ngoài và đường kính trong của trục các-đăng;
Lcd là chiều dài trục các-đăng; là khối lượng riêng của vật liệu làm trục các-đăng, đối với
thép có thể tính = 7800[kg/m3].
Độ cứng chống uốn ngang đối với trục có thể xác định bằng: E .J C K 3 (x.3) Lcd
Ở đây K là hệ số tỷ lệ, phụ thuộc vào đặc tính chịu tải tác dụng lên dầm chịu uốn ngang
và phương pháp kẹp đỡ trục ở hai đầu truc; E là mô-dun đàn hồi kéo nén đói với vật liệu làm
trục các-đăng, với thép thì E = 2,1.1011[N/m2]; J là mô-men quán tính độc cực đối với mặt cắt ngang của trục.
Với trục rỗng, mô-men quán tính J [m4] có thể được tính bằng:
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 157 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ D4 d4 J (x.3) 64
Thay tất cả các biểu thức trển khai và giá trị các đại lượng vào công thức tính số vòng
quay nguy hiểm nt đối với trục các-đăng rỗng với gối tựa hai đầu, ta được:
nt 0,85.105 D2 d 2 / L2cd (x.3)
Để tránh hiện tượng cộng hượng đối với trục các-đăng, thì số vòng quay tới hạn của
trục phải hơn hơn tốc độ lớn nhất mà động cơ có thể truyền tới trục các-đăng nmax; nghĩa là ta phải có:
0,85.105 D 2 d 2 / L2cds ncd (max) (x.3)
Vậy khi thiết kế trục các-đăng, chiều dài lớn nhất Lcd(max) của trục các-đăng chỉ được phép bằng:
Lcd (max) 0,85 .10 5 D 2 d 2 /(ncd (max) .kn ) (x.3)
Trong đó: kn là hệ sơ dự trữ an toàn,có thể láy từ 1,25 đến 1,5. Các kích thước trục các-
đăng Lcd, D và d đều sử dụng thứ nguyên chuẩn của hệ thống IS [m]; trong khi số vòng quay
lớn nhất truyền đến trục các đăng ncd(max) vẫn được tính theo đơn vị thông dụng của nó là [vòng/phút].
Đối với trục các đăng đặc thì d = 0; tuy nhiên như vậy là không có lợi vì không tốt cho
mô-men chống uốn ngang cũng như làm giảm số vòng quay nguy hiểm về phía số vòng quay
làm việc lớn nhất truyền tới trục các-đăng.
Đối với trục bậc, vừa rỗng vừa đặc, thì nên quy dẫn trục đặc về thành trục rỗng. Lúc
này nếu gọi đoạn chiều dài trục đặc là Lđ với đường kính Dđ thì khi cuyển thành trục rỗng co
đường kính tương ứng là D và d thì ciều dài tương đương được suy ra từ phương trình quy dẫn như sau: D 2 d2 Dd L2qd L2đ (x.3) Lqd Lđ
( D 2 d 2 / Dd ) (x.3)
TS.GVC. Lê Văn Tụy, ThS.GVC. Nguyễn Lê Châu Thành 158 lOMoAR cPSD| 46342576
Thiết kế ô tô-Lưu hành nội bộ
TS .GVC . Lê Văn T ụ y, ThS. GVC. Nguy ễ n Lê Châu Thành 159