Đề cương môn Kỹ thuật đo lường - Trường Đại học bách khoa - Đại học đà nẵng
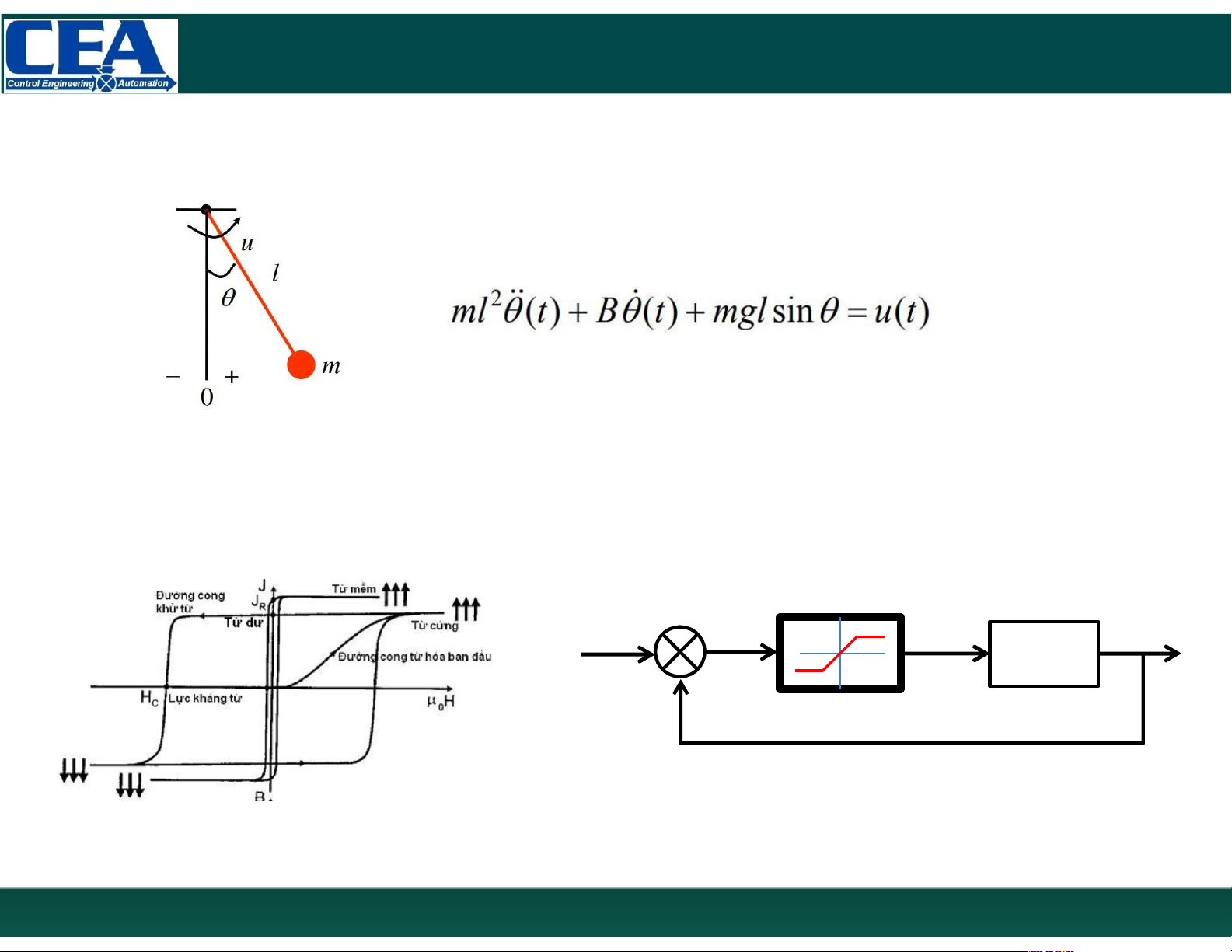
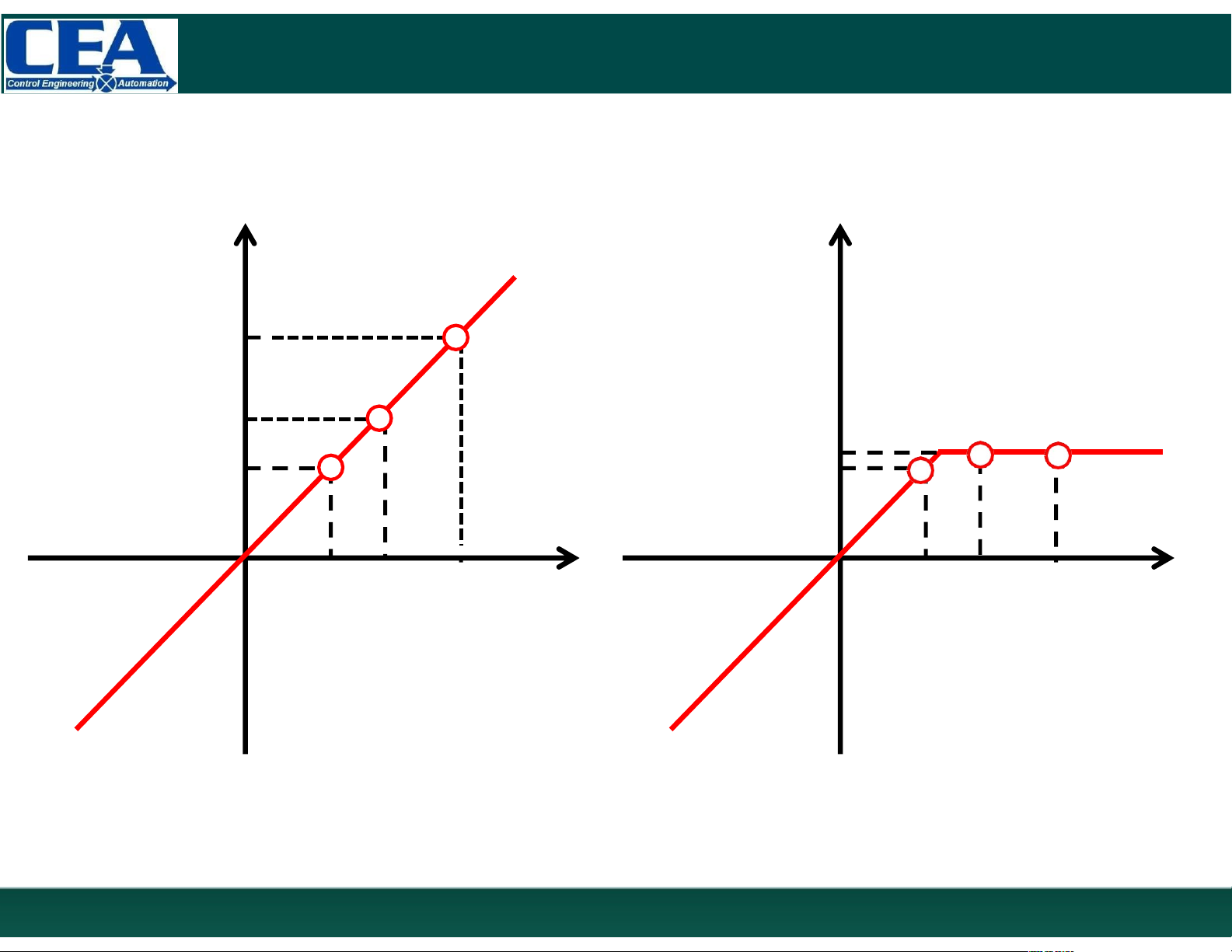
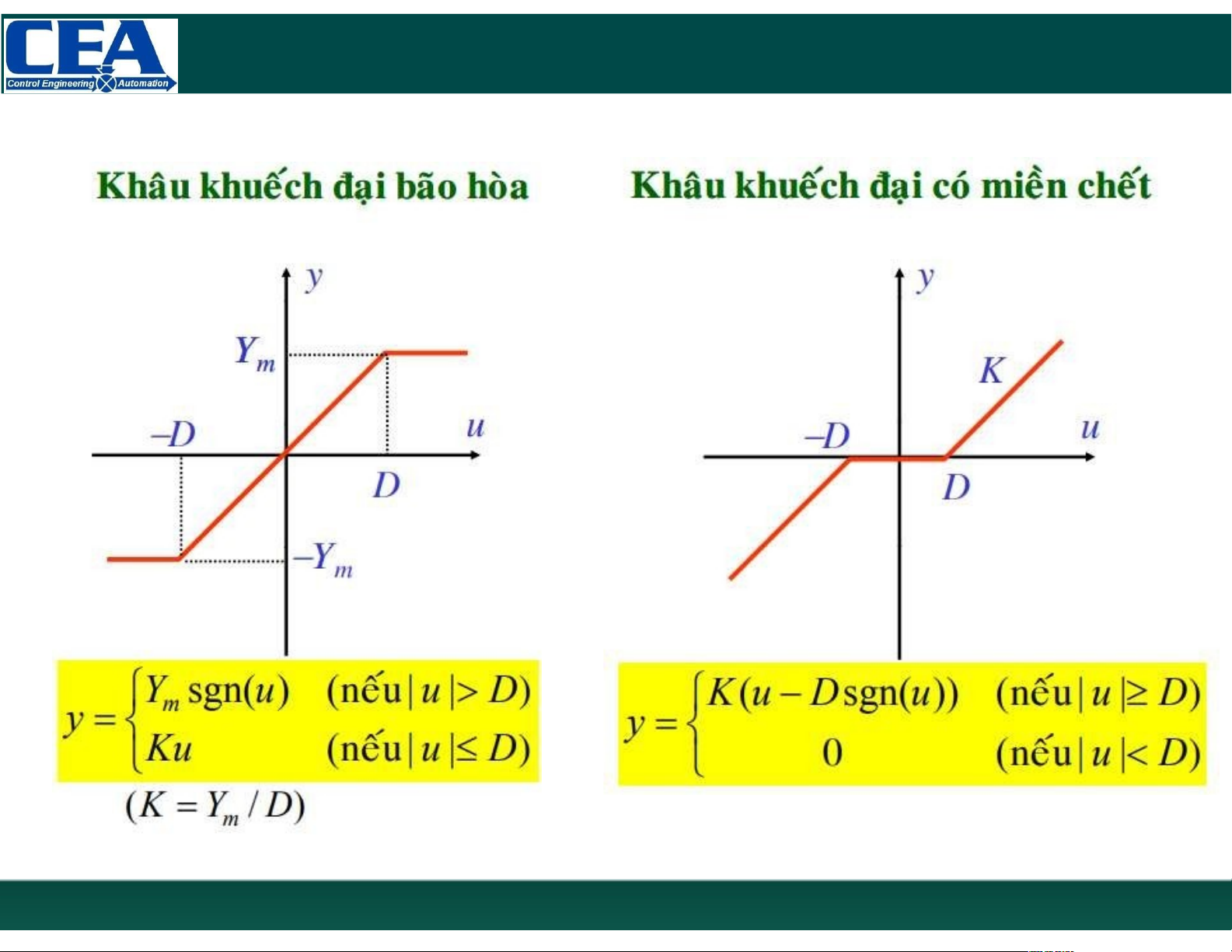
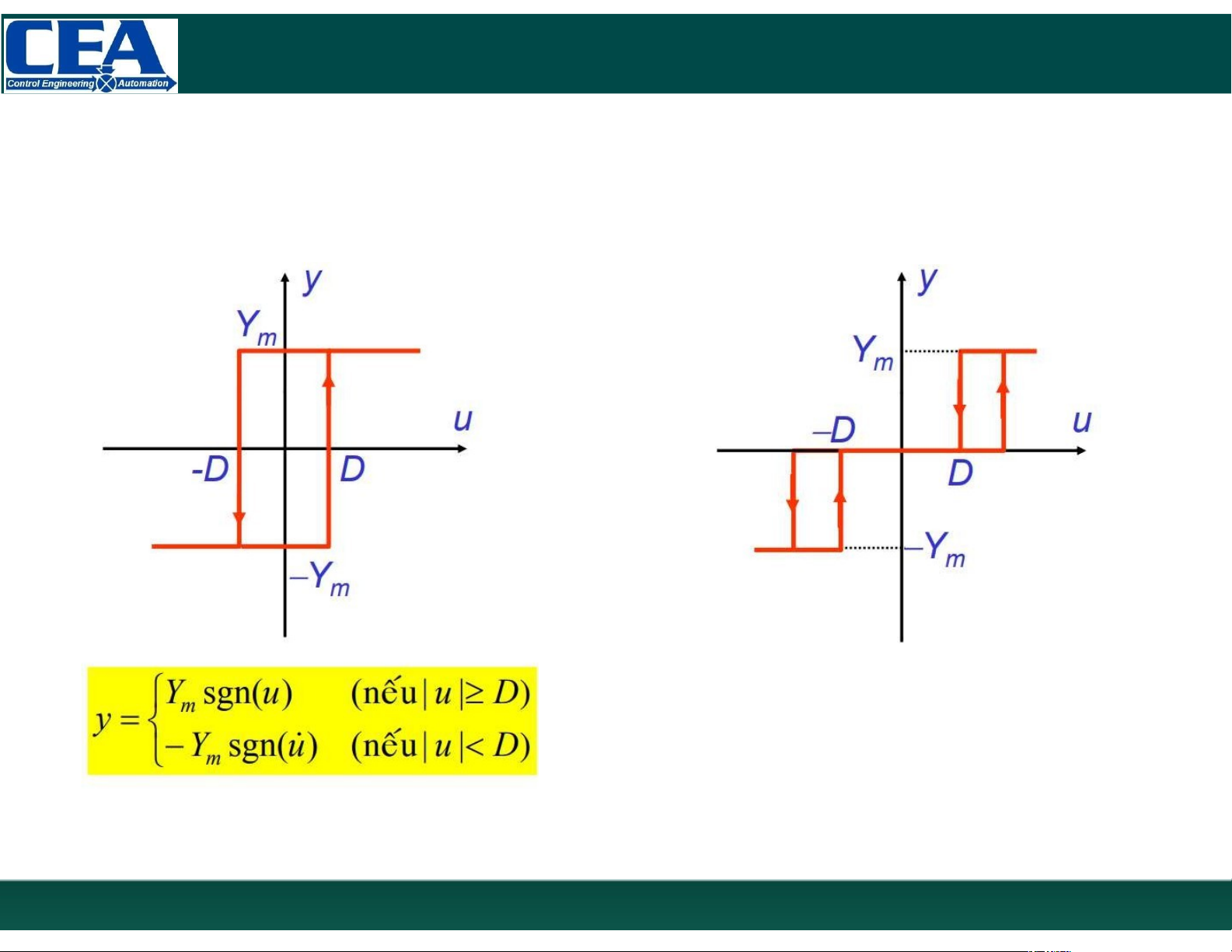
Xác điểmđiểmdừngnếukhâuphituyếnlàkhâukhuếchđạibãohòa tại giá trị ± 0,5.Đề cương môn Kỹ thuật đo lường - Trường Đại học bách khoa - Đại học đà nẵng. Tài liệu gồm 39 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Kỹ thuật đo lường 33 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:
Tài liệu liên quan:
-
Đề cương môn Kỹ thuật đo lường | Trường Đại học Bách khoa, Đại học Đà Nẵng
24 12 -

Đề cương môn kỹ thuật đo lường- Trường Đại học bách khoa - Đại học đà nẵng.
54 27 -

https://www.studocu.vn/vn/document/dai-hoc-dien-luc/dien-chuyen-nganh/ky-thuat-do-luong-da-chuyen-doi/19438979
50 25 -

Đề cương môn kỹ thuật đo lường- Trường Đại học bách khoa - Đại học đà nẵng.
53 27 -

Đề cương môn kỹ thuật đo lường- Trường Đại học bách khoa - Đại học đà nẵng.
54 27