Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Động cơ đồng bộ ba pha, trước đây thường dùng cho loại truyền động không điều chỉnh tốc độ,
Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Tài liệu gồm 25 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:
Preview text:
lOMoARcPSD|610 229 53
TỔNG HỢP HỆ THỐNG TRUYỀN ĐỘNG ĐIỆN CHƯƠNG 4
MÔ HÌNH HÓA VÀ ĐIỀU KHIỂN HỆ TRUYỀN ĐỘNG
ĐIỆN SỬ DỤNG ĐỘNG CƠ XOAY CHIỀU 3 PHA ĐB
Ngành Kỹ thuật Điều khiển & Tự động hóa Khoa Điện
PGS. TS. Lê Tiến Dũng lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
Chương 4. MÔ HÌNH HÓA VÀ ĐIỀU KHIỂN HỆ TRUYỀN ĐỘNG ĐIỆN XOAY
CHIỀU 3 PHA ĐỒNG BỘ
4.1. Khái niệm chung
4.2. Sơ đồ cấu trúc của hệ thống
4.3. Mô hình toán học của động cơ điện xoay chiều 3 pha đồng bộ trên không gian vector
4.4. Cấu trúc điều khiển vector cho hệ ĐK TĐĐ sử dụng động cơ điện xoay chiều 3 pha đồng bộ
4.5. Mô phỏng trên Matlab - Simulink
4.6. Hệ ĐK TĐĐ sử dụng động cơ Một chiều không chổi than (BLDC) 2 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
4.1. Khái niệm chung
Động cơ đồng bộ ba pha, trước đây thường dùng cho loại truyền động không điều chỉnh tốc độ,
công suất lớn hàng trăm kW đến hàng MW ( truyền động cho các máy nén khí, quạt gió, bơm nước,
máy nghiền v.v…). Ngày nay do sự phát triển mạnh mẽ của công nghiệp điện tử và công nghệ vật liệu,
động cơ đồng bộ được nghiên cứu ứng dụng nhiều trong công nghiệp, ở mọi loại dải công suất từ vài
trăm W ( truyền động cho cơ cấu ăn dao máy cắt gọt kim loại, cơ cấu chuyển động của tay máy, người
máy), đến hàng MW ( cho các truyền động kéo tàu tốc độ cao TGV, máy nghiền, máy cán v.v…).
Có thể phân loại động cơ xoay chiều đồng bộ ba pha ra làm hai loại chính:
- Loại rôto có kích từ bằng điện với dải công suất lớn từ vài trăm tới vài MW. Cuộn kích từ
được cuốn theo cực ẩn hoặc cực lồi.
- Loại rôto là nam châm vĩnh cửu với dải công suất nhỏ. 3 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
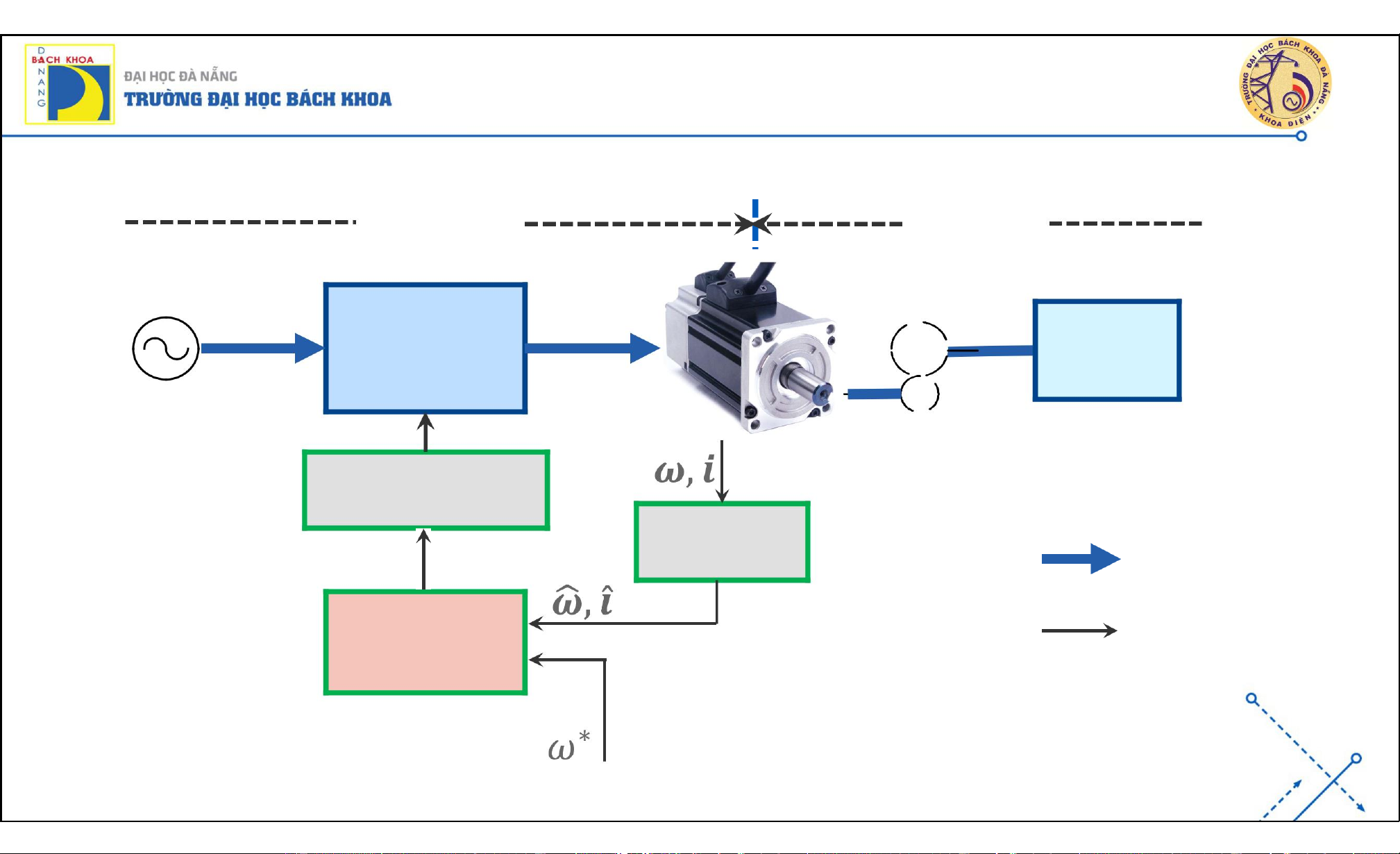
4.2. Sơ đồ cấu trúc của hệ thống PHẦN ĐIỆN PHẦN CƠ U 0, f0 u(t) BỘ BIẾN ĐỔI TẢI TẦN SỐ Nguồn AC Synchronous Phát xung điều motor khiển CẢM BIẾN u*(t) Động lực Giá trị BỘ ĐIỀU Điều khiển phản KHIỂN hồi Giá trị đặt/mong muốn 4 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng 2 fs
Tốc độ quay của động cơ được tính bằng biểu thức: s pp
trong đó: fs là tần số nguồn cung cấp; pp là số đôi cực của động cơ.
Từ công thức trên ta thấy điều chỉnh tần số nguồn cung cấp sẽ điều chỉnh được tốc độ động cơ. Do
vậy cấu trúc hệ truyền động điều chỉnh tốc độ động cơ đồng bộ bao giờ cũng có bộ biến đổi tần số.
Với một tần số nhất định thì tốc độ động cơ không đổi dù cho tải thay đổi, nếu động cơ không mất
đồng bộ. Do đó, động cơ điện đồng bộ rất thích hợp với yêu cầu điều chỉnh tốc độ chính xác và khi
nhiều động cơ đang làm việc đồng bộ nhau. Động cơ đồng bộ làm việc với hệ số công suất và hiệu
suất rất cao (không có tổn hao công suất trượt như động cơ không đồng bộ). 5 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
4.3. Mô hình toán học của động cơ điện xoay chiều 3 pha đồng bộ trên không gian vector
Phương trình điện áp stator: s s us = Rs is +
Trong đó: Rs là điện trở cuộn dây pha stator ψ s
s là từ thông stator
Phương trình từ thông: s s s ψs = Lsis + ψp
Vector từ thông stator ψ s
s bao gồm hai thành phần: một thành phần do dòng
stator tự cảm trong các cuộn dây stator, một thành phần là từ thông cực từ ψ s p . 6 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
Phương trình momen quay: mM = zp ψs is
Phương trình chuyển động: J dω m = m + M w zp dt
Trong đó: mM, mw là momen quay của động cơ, momen tải
J là momen quán tính
Việc chuyển đổi các đại lượng giữa hệ tọa độ dq và hệ tọa độ cố định với stator αβ được thực hiện như sau: ψ s f s f jθ i s = i f e jθ = ψ e jθ s s us = us e s s ψ s = ψ f e jθ s f dψs dψs jθ f jθ p p = e e dt dt + jωs ψs 7 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
Thay các đại lượng trên vào các phương trình cơ bản ở mục trên, ta thu được các phương
trình mới trên hệ tọa độ dq:
Phương trình từ thông: ψ f f f s = Lsis + ψp Trong đó ψ f
s là vector từ thông cực. Vì trục d của hệ tọa độ dq trùng với trục của từ thông
cực nên thành phần vuông góc (thành phần trục q) của ψ f
s bằng không. Do đó: ψ f
p = ψpd + j ψpq = ψp
Ngoài ra, điện cảm của cuộn dây stator là khác nhau khi đo ở đỉnh cực Lsd (dọc theo trục d) và khi ở ngang cực
Lsq (dọc theo trục q). Từ đó, ta có phương trình các thành phần từ thông: 8 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng f
Phương trình điện áp stator: f jθ f jθ dψs jθ f jθ us = R + jω e s is e + dt e s ψs e f dψ => u f = R i f + s + jω ψ f dt s s s s s
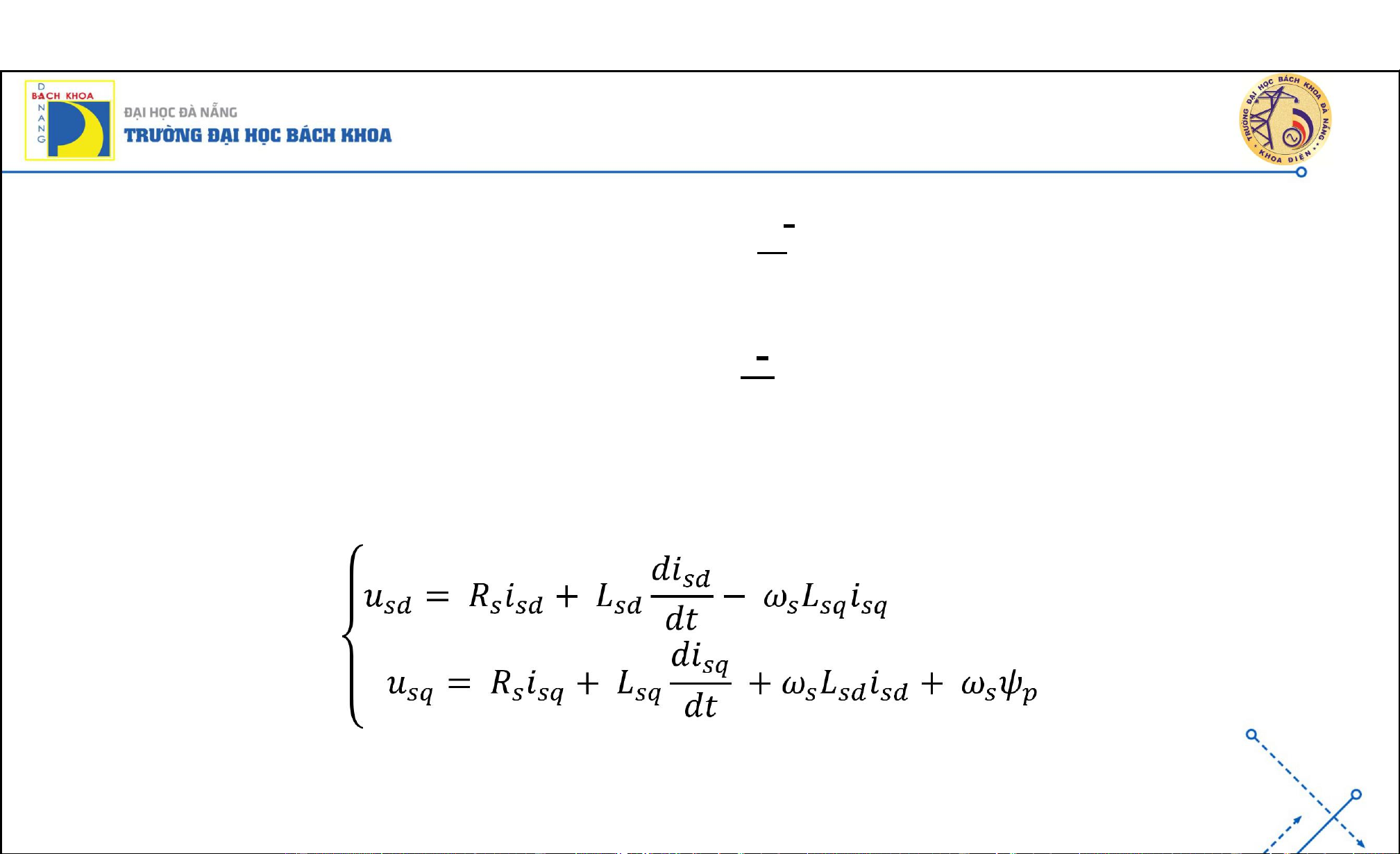
Sau một số biến đổi chúng ta thu được phương trình các thành phần điện áp stator: 9 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
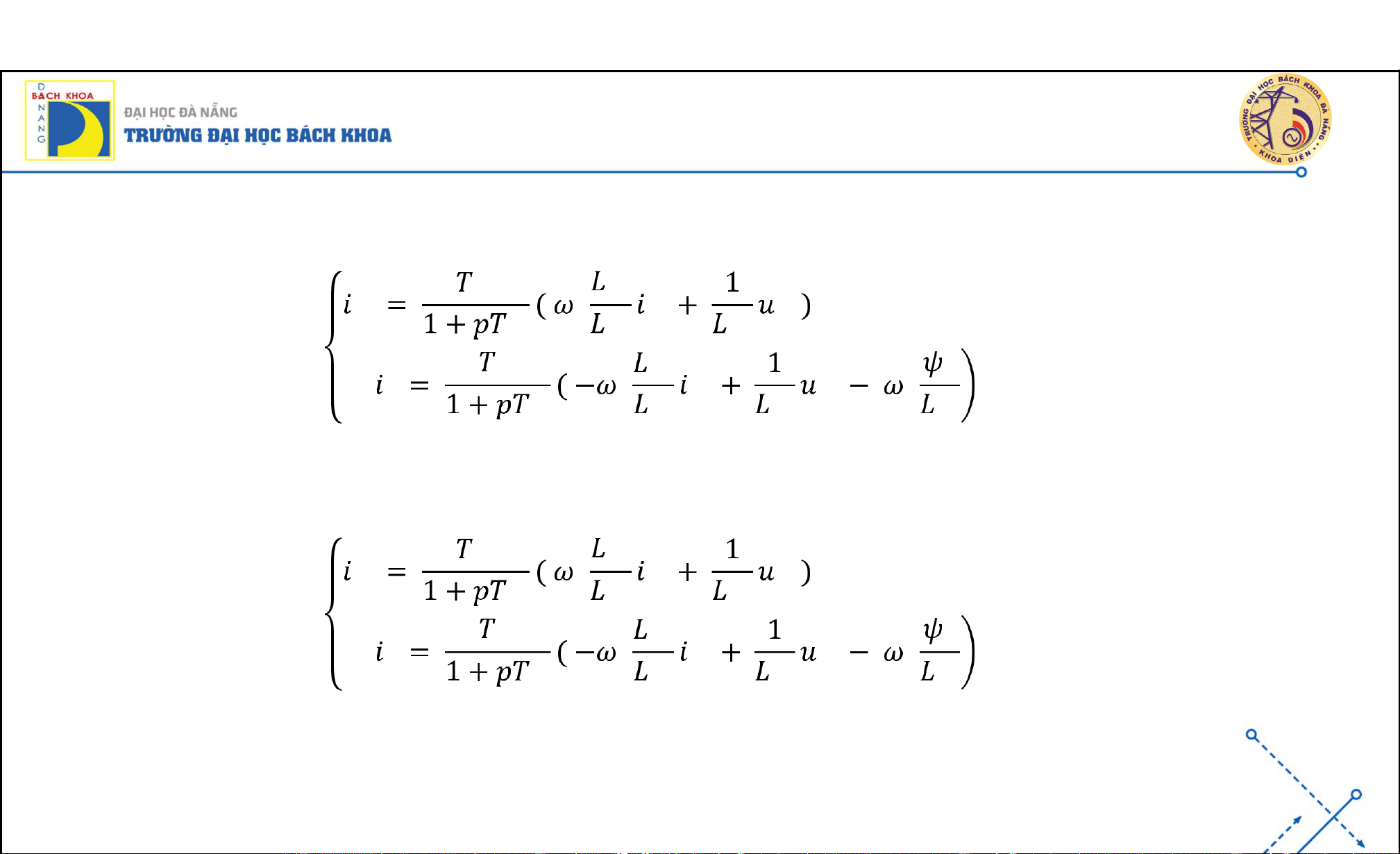
Có thể viết lại hệ phương trình như sau:
Chuyển sang không gian Laplace ta có:
Trong đó: Tsd = Lsd/Rs ; Tsq = Lsq/Rs 10 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
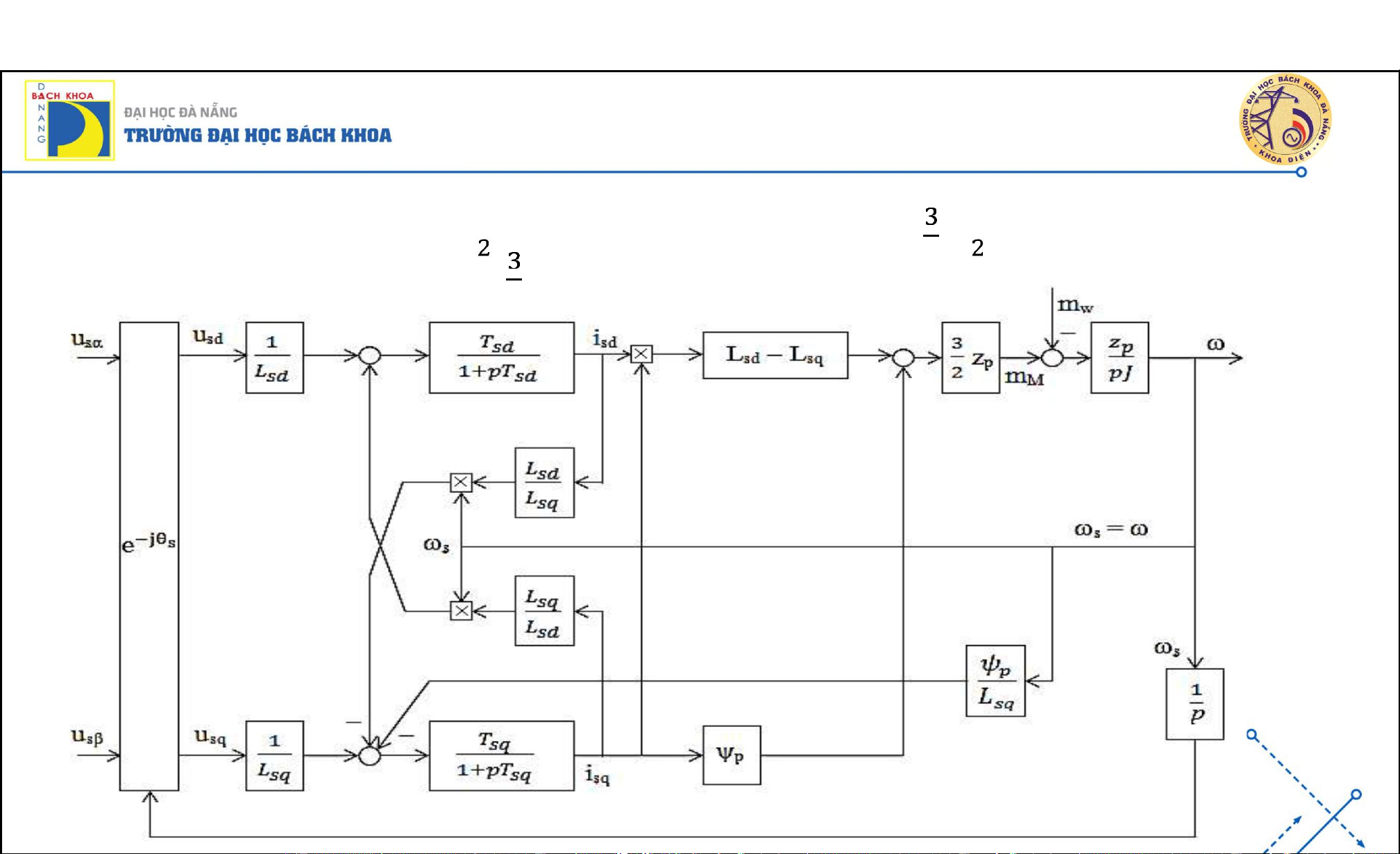
Phương trình momen quay:
mM = zp (ψsd isq – ψsq isd)
=> mM = zp [ψp isq + isq isd(Lsd - Lsq)] lOMoARcPSD|610 229 53 KHOA ĐIỆN
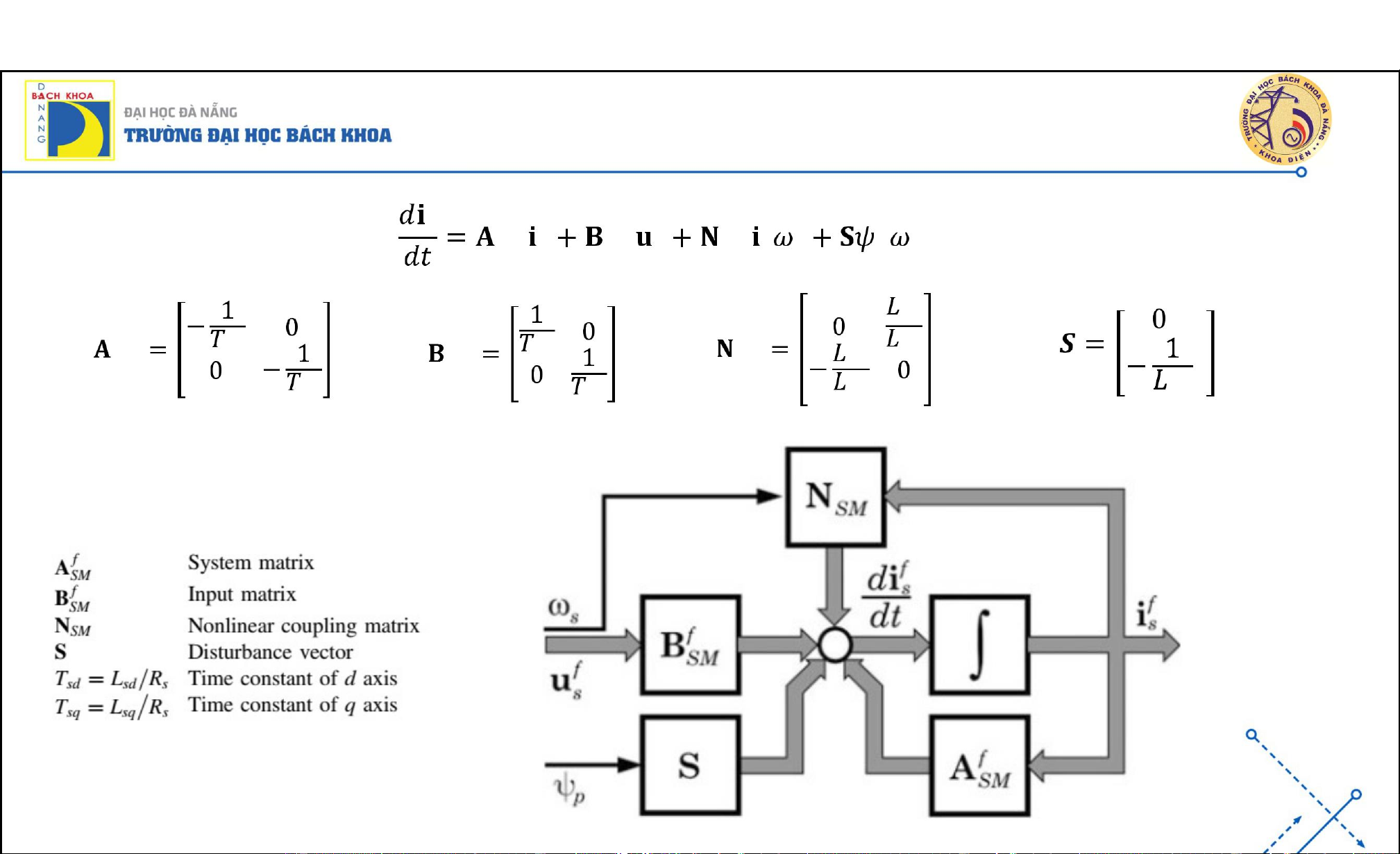
PGS. TS. Lê Tiến Dũng Mô hình trạng thái:
Với: Tsd = Lsd/Rs; Tsq = Lsq/Rs 12 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng 13 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
4.4. Cấu trúc điều khiển vector cho hệ ĐK TĐĐ sử dụng động cơ điện xoay
chiều 3 pha đồng bộ
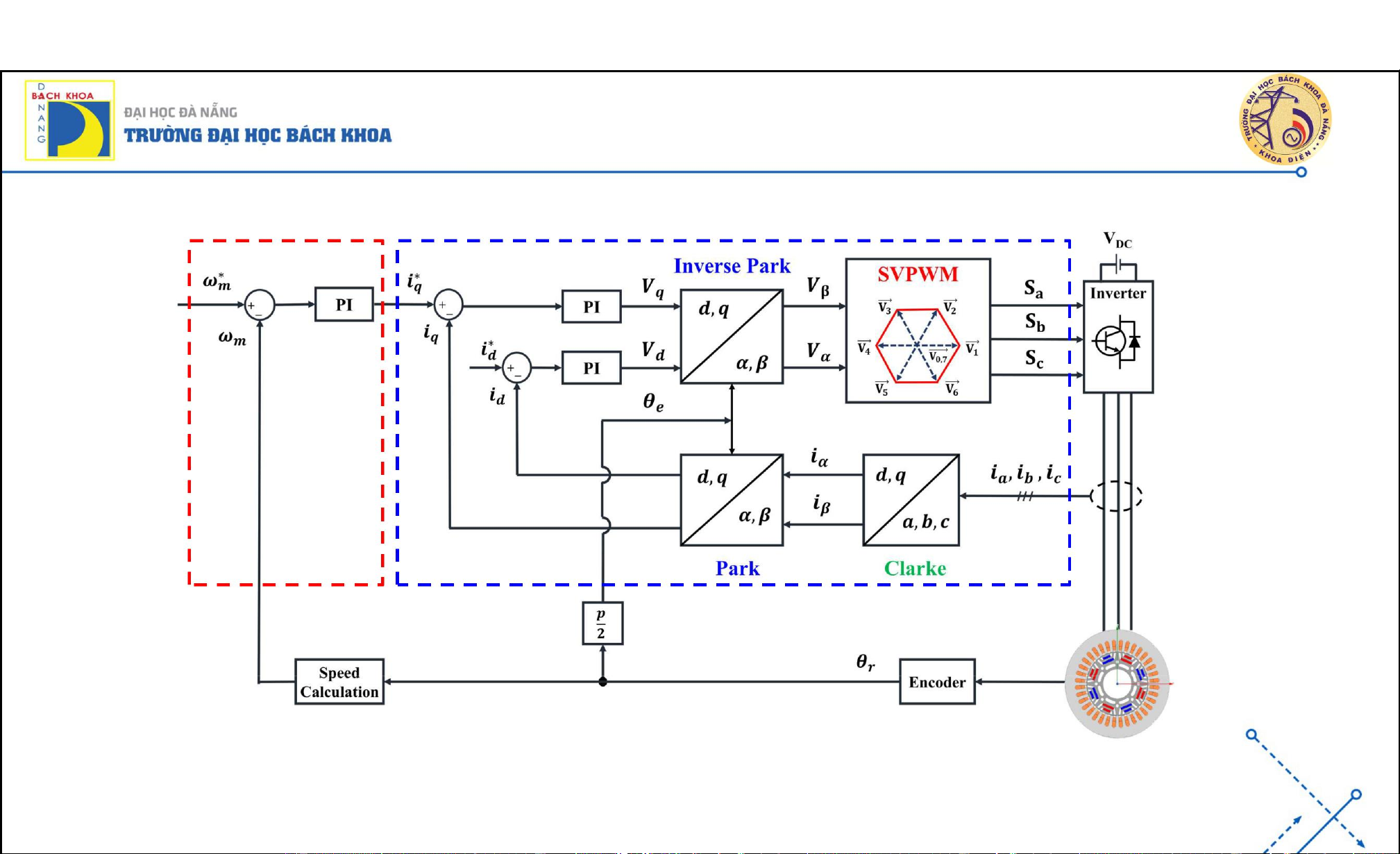
Cấu trúc điều khiển hệ truyền động điện sử dụng động cơ đồng bộ kích từ vĩnh cửu PMSM
được xây dựng dựa trên công thức mô-men điện từ: i i mM = 2 sq+isq sd Lsd − Lsq 3
Vì động cơ PMSM dùng nam châm vĩnh cửu nên từ thông cực ψp là hằng số, do đó momen
điện từ sẽ tỷ lệ trực tiếp với thành phần dòng isd và isq.
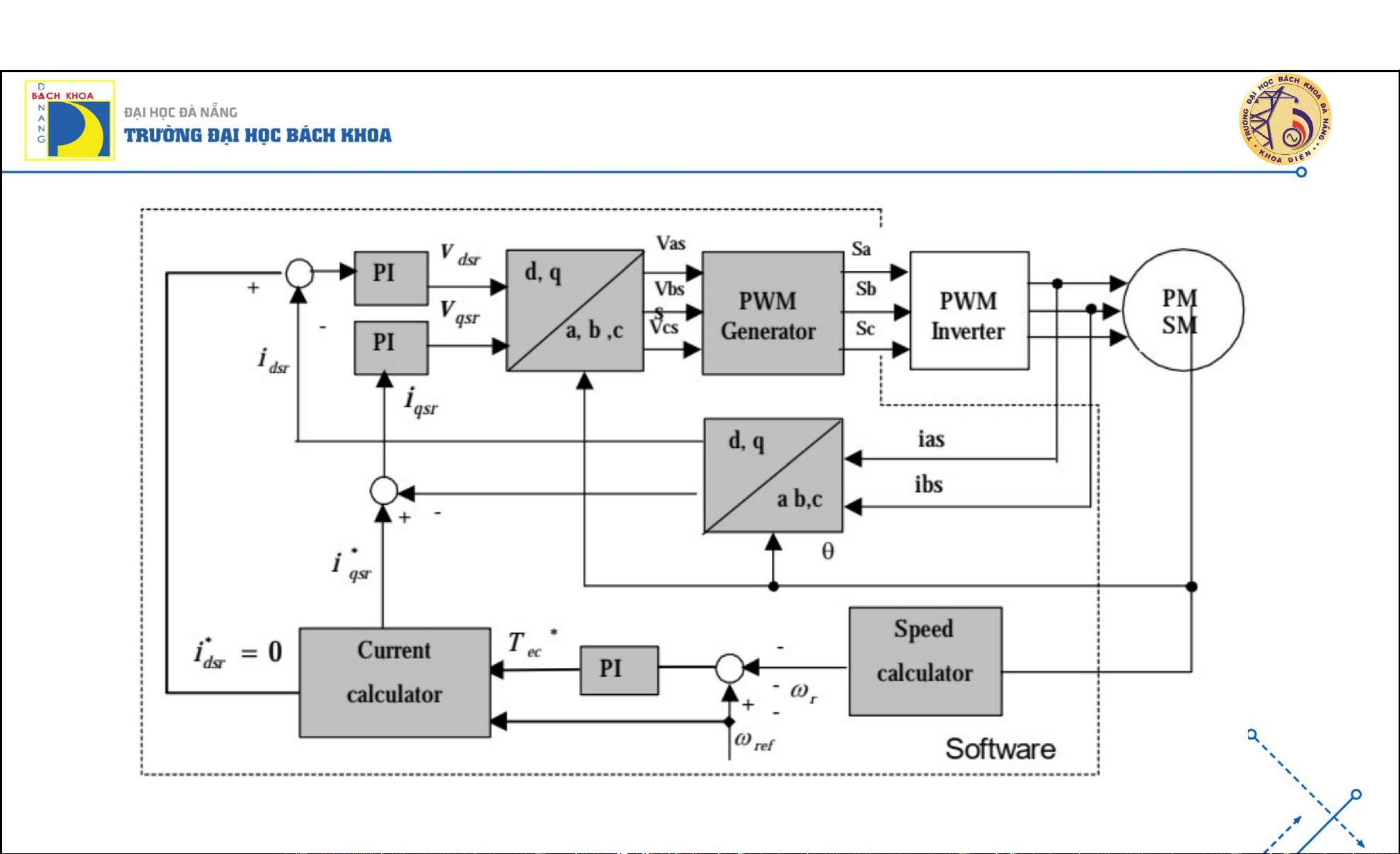
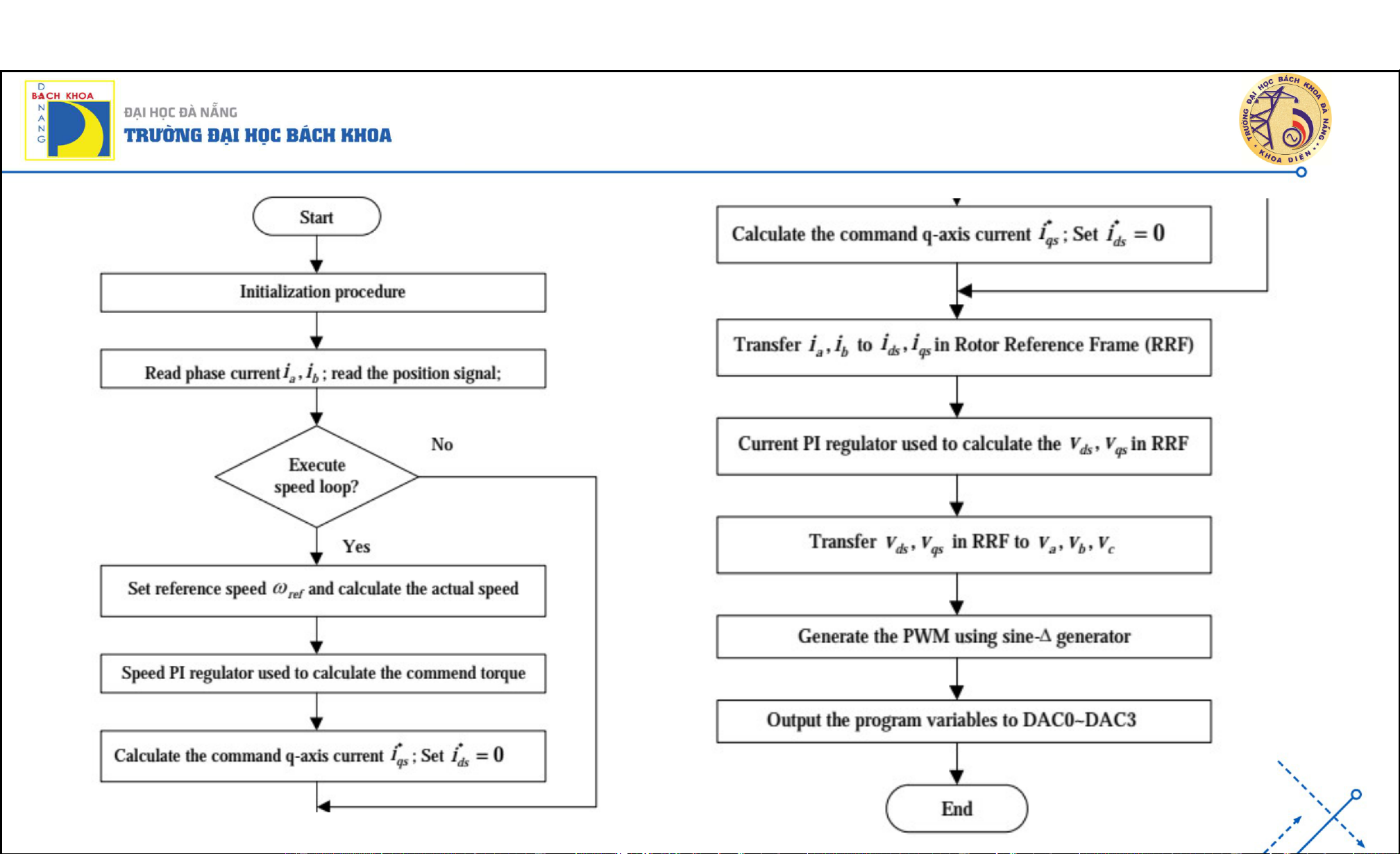
Thông thường nếu trường hợp không cần điều khiển từ thông thì trong thuật toán điều
khiển chỉ cần điều khiển mô-men điện từ bằng cách điều chỉnh dòng isq. Còn thành phần
dòng isd được đặt bằng 0 để đạt được tỉ lệ mô-men/dòng điện là tối đa.
Trong một số trường hợp cần điều khiển suy giảm từ thông thì sẽ điều khiển cả thành phần dòng isd. 14 lOMoARcPSD|610 229 53 KHOA ĐIỆN
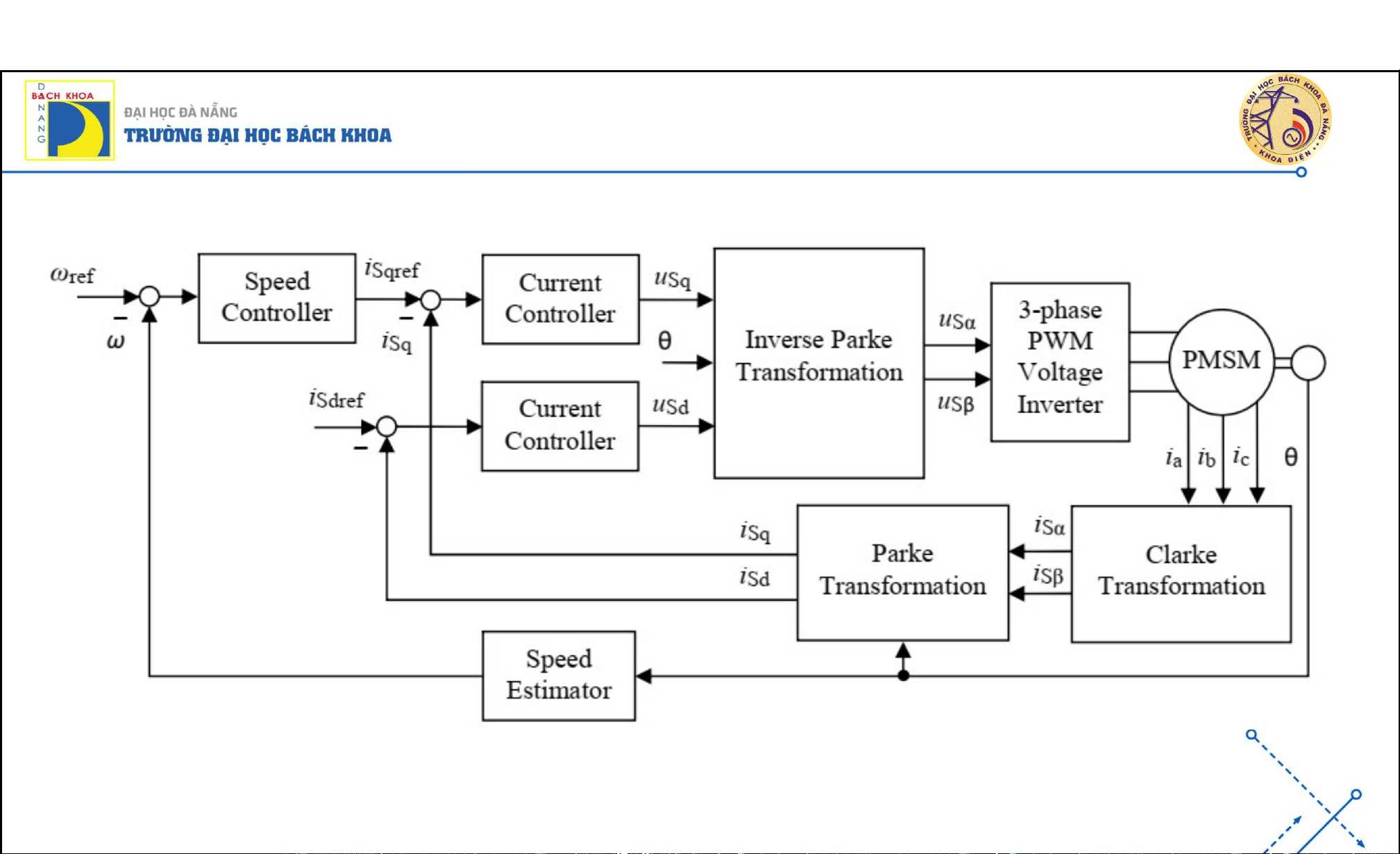
PGS. TS. Lê Tiến Dũng
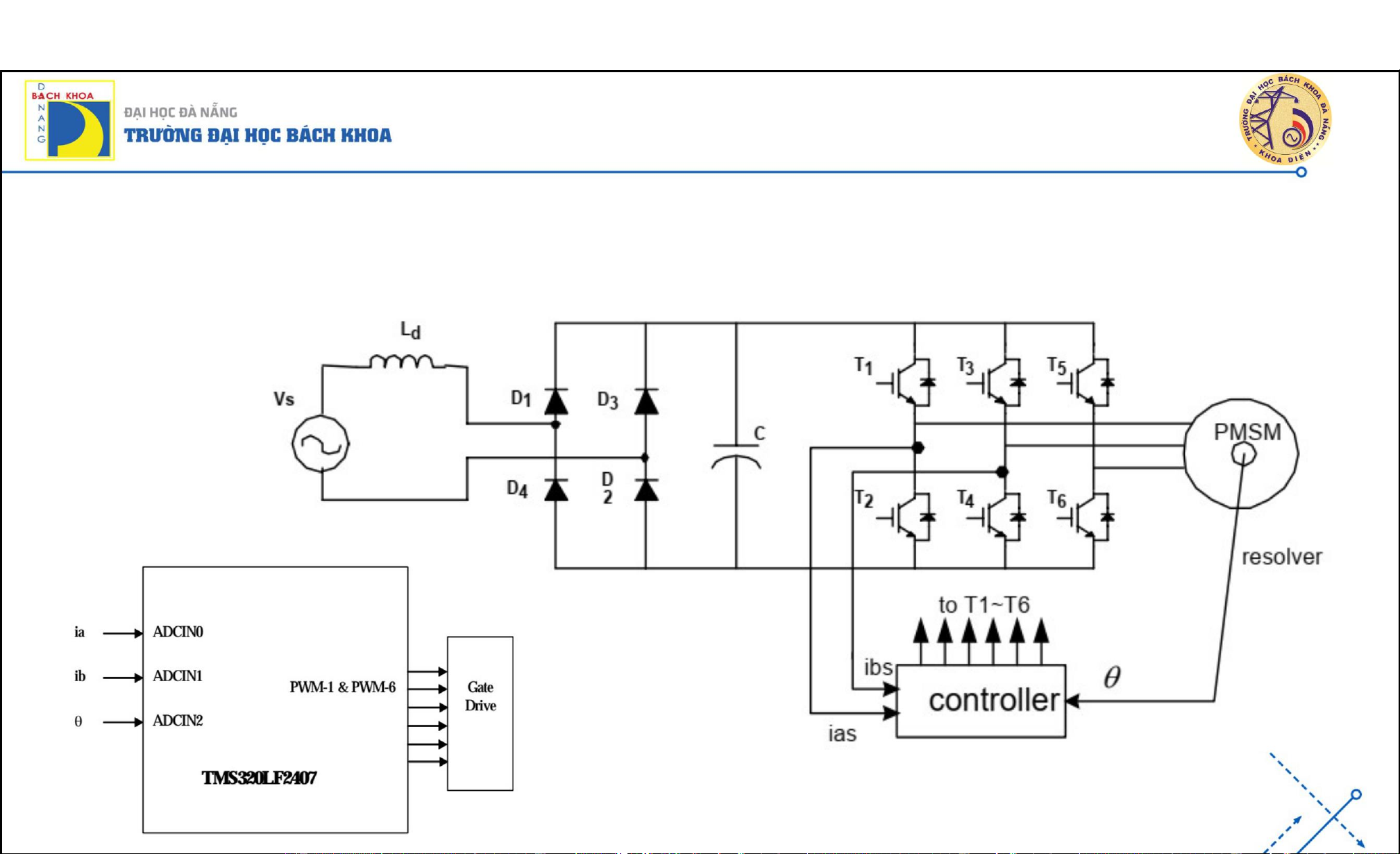
Trong cấu trúc điều khiển hệ truyền động điện sử dụng động cơ đồng bộ kích từ vĩnh cửu
PMSM luôn cần đo vị trí của rotor động cơ để xác định góc pha của từ thông rotor. 15 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng 16 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng 17 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng 18 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng 19 lOMoARcPSD|610 229 53 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng Speed Loop Current Loop
The Id reference controls rotor magnetizing flux, Iq reference
controls the torque output of the motor
Id and Iq are only time-invariant under steady-state load conditions 20
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
15 8 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
54 27 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
45 23 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
46 23 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
47 24