Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Saukhicácdaođộngtắtdần,mômenxoắnđạtgiátrịổnđịnh(khoảng40– 50 Nm). Hệ thống đã ổn định và hoạt động trong trạng thái cân bằng
Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Tài liệu gồm 25 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:





Preview text:
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC BÁCH KHOA KHOA ĐIỆN
DỰ ÁN LIÊN MÔN PBL2 – Ngành Kỹ thuật điện
LỚP 22NH27 – ĐHBK - ĐHĐN
Giảng viên hướng dẫn: TS. GIÁP QUANG HUY
Nhóm thực hiện: NHÓM 5
Thành viên:
NGÔ THỊ MỸ HUYỀN ( NT)
NGUYỄN ĐÌNH CHÍNH
NGUYỄN LÊ THÁI HÒA
NGÔ QUANG NHẬT
NGUYỄN ANH PHƯƠNG
Đề tài: Truyền động băng tải 2m/s, dùng động cơ DC,
bộ biến đổi công suất + chỉnh lưu có đảo chiều 1 Mục lục
LỜI NÓI ĐẦU .............................................................................................. 4
1.1 Tổng quan về hệ thống: .................................................................... 6
Giới thiệu yêu cầu đề tài, mô tả bài toán của đề tài ................................ 6
1.2 Sơ đồ tổng quan hệ thống ................................................................. 7
1.3 Phân tích yêu cầu hệ thống cần đáp ứng .......................................... 8
1.3.1 Yêu cầu về tốc độ mong muốn của tải..................................... 8
1.5 Phân tích chọn phương án truyền động cho động cơ ..................... 13
1.5.1 Các trạng thái hoạt động của động cơ ................................... 13
1.5 Phân tích chọn phương án truyền động cho động cơ ..................... 13
1.5.1 Các trạng thái hoạt động của động cơ ................................... 13
1.5.2 Chọn phương án khởi động động cơ ..................................... 14
1.5.3 Chọn phương án đảo chiều động cơ ...................................... 15
1.5.5 Chọn phương án điều khiển tốc độ động cơ .......................... 16
1.6 Tính chọn công suất động cơ .......................................................... 17
1.6.1 Tính chọn động cơ ................................................................. 17
1.6.2 Kiểm nghiệm các thông số điện cơ của động cơ ................... 21
1.8. Kiểm nghiệm động cơ bằng mô phỏng MATLAB/SIMULINK ... 26
Chương 2: Tính toán mạch điện tử công suất ............................................ 27
2.1 Tính chọn bộ biến đổi công suất ..................................................... 27
2.1.1 Phân tích chọn bộ biến đổi công suất .................................... 27
2.1.2 Tổng quan về bộ chỉnh lưu kép 3 pha ................................... 27
2.1.3 Tính chọn linh kiện cho bộ biến đổi ...................................... 29
2.1.4 Tính chọn các thiết bị bảo vệ ................................................. 31
2.2 Mô phỏng bộ biến đổi công suất .................................................... 32
Chương 3: SƠ ĐỒ MẠCH TOÀN HỆ THỐNG ....................................... 34
Chương 4 : MÔ PHỎNG, ĐÁNH GIÁ KẾT QUẢ HỆ THỐNG .............. 37
4.1 Kết quả mô phỏng và nhận xét ....................................................... 37 2
4.2 Đánh giá chất lượng hệ thống ......................................................... 40
4.3 Ưu điểm và nhược điểm đề tài........................................................ 40 3
Mục lục hình ảnh
Hình 1. 1 Tải chuyển động tịnh tiến ............................................................. 7
Hình 1. 2 Đồ thị mong muốn của tải ............................................................ 7
Hình 1. 3 Đồ thị biểu diễn tốc độ quay (ωm) của tải ................................... 10
Hình 1. 4 Đồ thị biểu diễn momen điện từ (Tem) của tải ............................ 11
Hình 1. 5 Đồ thị công suất động cơ ............................................................ 13
Hình 1. 6 Đồ thị trạng thái hoạt động của động cơ .................................... 14
Hình 1. 7 Đồ thị mô tả khởi động mềm ...................................................... 15
Hình 1. 8 Sơ đồ mạch điện và đồ thị đặc tính cơ - điện của hãm động năng
. ................................................................................................................... 17
Hình 1. 9 Sơ đồ mạch thay đổi điện áp phần ứng và sơ đồ thay thế .......... 17
Hình 1. 10 Đồ thị đặc tính cơ – điện khi điều chỉnh điện áp phần ứng động
cơ ................................................................................................................ 18
Hình 1. 11 Động cơ điện 1 chiều ZD37 ..................................................... 21
Hình 1. 12 Hộp giảm tốc WPDS ................................................................ 21
Hình 1. 13 Đồ thị khiểm nghiệm mô men điện từ của động cơ khi có hộp
số. ................................................................................................................ 25
Hình 1. 14 Đồ thị khiểm nghiệm công suất của động cơ khi có hộp số. .... 26
Hình 2. 1 Sơ đồ mạch chỉnh lưu kép 3 pha 28
Hình 2. 2 Sơ đồ mô tả chỉnh lưu kép .......................................................... 28
Hình 2. 3 Các trạng thái hoạt động của bộ chỉnh lưu kép .......................... 28
Hình 2. 4 Sơ đồ nguyên lí mạch chỉnh lưu cầu 3 pha ................................ 29
Hình 2. 5 Thyristor T22 – 10 – 07 .............................................................. 31
Hình 2. 6 APTOMAT LiOA 2 Cực 75A (MCB 2P) .................................. 32
Hình 2. 7 Sơ đồ chi tiết mạch động lực ..................................................... 33 4
Mục lục bảng
Bảng 1. 1 Tốc độ mong muốn theo thời gian ............................................ 10
Bảng 1. 2 Giá trị momen điện từ yêu cầu của tải theo thời gian ............... 11
Bảng 1. 3 Công suất tức thời của tải theo thời gian .................................. 12
Bảng 1. 4 Thông số điện của động cơ ....................................................... 23
Bảng 1. 5 Thông số kích thước của động cơ ............................................. 24
Bảng 1. 6 Thông số hộp giảm tốc .............................................................. 24
Bảng 1. 7 Mô men điện từ yêu cầu của tải sau khi chọn động cơ và hộp
số. ................................................................................................................ 26
Bảng 1. 8 Công suất yêu cầu của tải sau khi đã chọn động cơ và hộp số. 27
Bảng 2. 1 Thông số của Thyristor T22-10-07 ............................................ 30
Bảng 2. 2 Tham số phần cứng đã chọn ...................................................... 35 5
LỜI NÓI ĐẦU
Ngày nay, với sự phát triển không ngừng của nền khoa học kỹ thuật đã tạo
ra những thành tựu to lớn, trong đó ngành tự động hóa cũng góp phần
không nhỏ vào thành công đó. Một trong những vấn đề quan trọng trong
các dây truyền tự động hoá sản xuất hiện đại là việc điều chỉnh tốc độ
động cơ. Động cơ điện được sử dụng rộng rãi trong mọi lĩnh vực của đời
sống xã hội, đặc biệt là trong các ngành công nghiệp sản xuất hiện đại và
trong nhiều lĩnh vực đời sống không thể thiếu các động cơ điện,vì vậy các
loại động cơ điện được chế tạo ngày càng hoàn thiện hơn.
Với đồ án “Truyền động băng tải 2m/s, dùng động cơ DC, bộ biến đổi
công suất + chỉnh lưu có đảo chiều” đã giúp chúng em hiểu rõ hơn về động
cơ điện một chiều cũng như những ứng dụng thực tế của nó trong đời sống
hiện nay. Với đề tài này, giúp em thấy được sự cần thiết của đông cơ điện
trong cuộc sống hiện tại, những phương pháp lựa chọn động cơ, tính toán
tải … nhằm xây dựng một hệ thống điều khiển đảm bảo tính tin cậy, chính
xác, đảm bảo các vấn đề kinh tế, kỹ thuật.
LỜI CẢM ƠN
Trong thời gian thực hiện đề tài, nhóm chúng em đã nhận được sự giúp đỡ
,hướng dẫn tận tình từ Thầy Giáp Quang Huy để nhóm chúng em có thể
hoàn thành đề tài này. Chúng em xin chân thành cảm ơn! 6
CHƯƠNG I: TỔNG QUAN VỀ HỆ THỐNG, TÍNH
TOÁN THEO YÊU CẦU CỦA TẢI VÀ TÍNH TOÁN CÔNG SUẤT ĐỘNG
1.1 Tổng quan về hệ thống:
Giới thiệu yêu cầu đề tài, mô tả bài toán của đề tài:
• Dự án này yêu cầu thiết kế hệ thống điều khiển và giám sát tốc độ hệ
thống truyền động sử dụng động cơ một chiều kích từ độc lập với tải
chuyển động tịnh tiến.
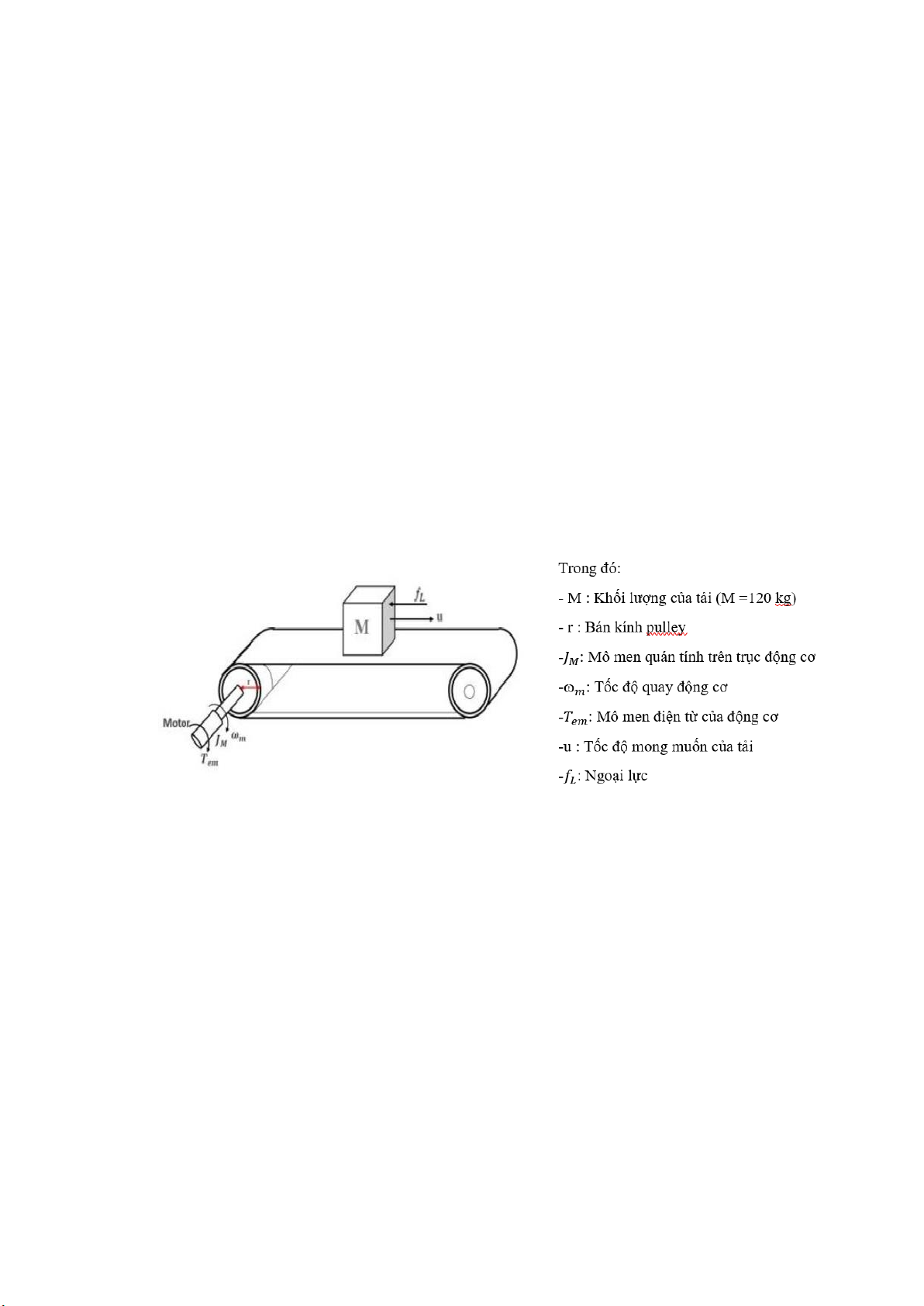
• Yêu cầu hệ truyền động: điều khiển băng tải để vật có khối lượng M
chuyển động tịnh tiến (mô tả như Hình 1.1) với tốc độ mong muốn
(mô tả như Hình 1.2). Cụ thể trong đề tài này ta chọn tải là vật có
khối lượng 120 kg. Nguồn cấp cho hệ thống là nguồn xoay chiều 3 pha 220/380V.
Hình 1. 1 Tải chuyển động tịnh tiến 7
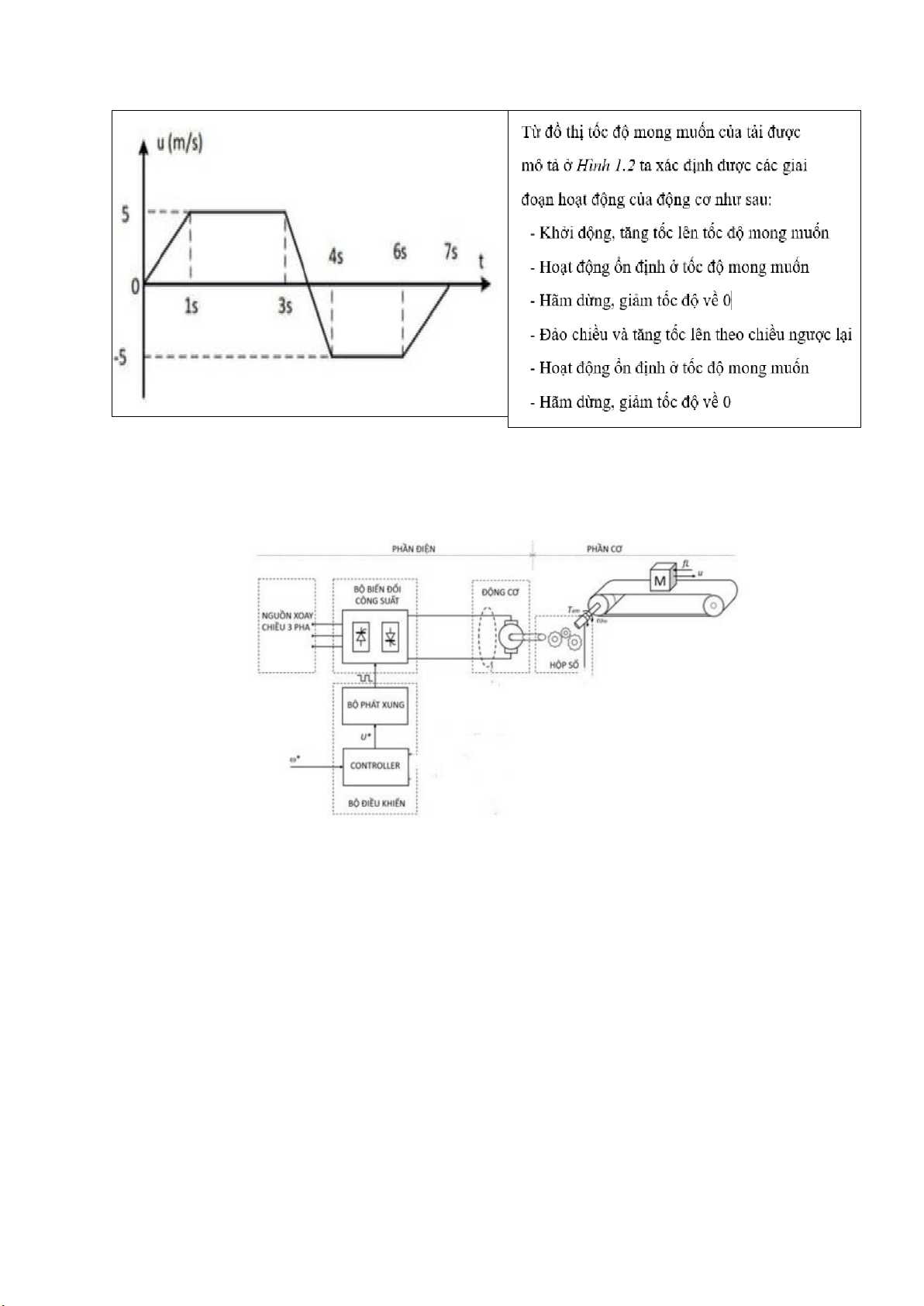
Hình 1. 2 Đồ thị mong muốn của tải
1.2 Sơ đồ tổng quan hệ thống
Hình 1.3: Sơ đồ tổng quát của hệ truyền động điện
Từ yêu cầu , ta xây dựng sơ đồ khối cấu trúc hệ thống gồm 3 khối chính:
• Khối nguồn điện: Có nhiệm vụ cung cấp điện áp phù hợp cho hệ
thống bằng cách sử dụng máy biến áp để biến đổi điện áp lưới 220/380V.
• Khối hệ thống điều khiển: Gồm 2 phần: a) Phần lực 8
❖ Bộ chỉnh lưu có nhiệm vụ đảo chiều quay và biến đổi điện
áp AC thành một chiều DC.
❖ Động cơ điện một chiềuk ích từ độc lập có nhiệm vụ biến
đổi năng lượng điện thành cơ để truyền động cho tải. b) Phần điều khiển:
❖ Cảm biến có nhiệm vụ thu thập tín hiệu dòng điện và tốc độ
của động cơ hiện tại.
❖ Bộ điều khiển làm nhiệm vụ tính toán sai lệch giữa giá trị
đặt và giá trị thu về từ cảm biến, từ đó sẽ quyết định điện áp U . dk
❖ Mạch phát xung làm nhiệm vụ quyết định thời điểm phát
xung kích mở các thyristor của bộ chỉnh lưu.
- Khối tải: Theo yêu cầu bài toán là băng tải truyền động tịnh tiến vật M.
1.3 Phân tích yêu cầu hệ thống cần đáp ứng
1.3.1 Yêu cầu về tốc độ mong muốn của tải
- Ta chọn các thông số mong muốn của tải: Khối lượng tải: M = 120kg;
Bán kính Pulley: r = 0.15m ( Giả sử bỏ qua ma sát ổ trục và lực cản không khí)
- Từ đồ thị tốc độ mong muốn được mô tả ở Hình 1.2, ta đi tính tốc độ góc
�� tương ứng theo từng mốc thời gian thông qua biểu thức: ω u = = u (rad/s) (1.1) M r 0.15
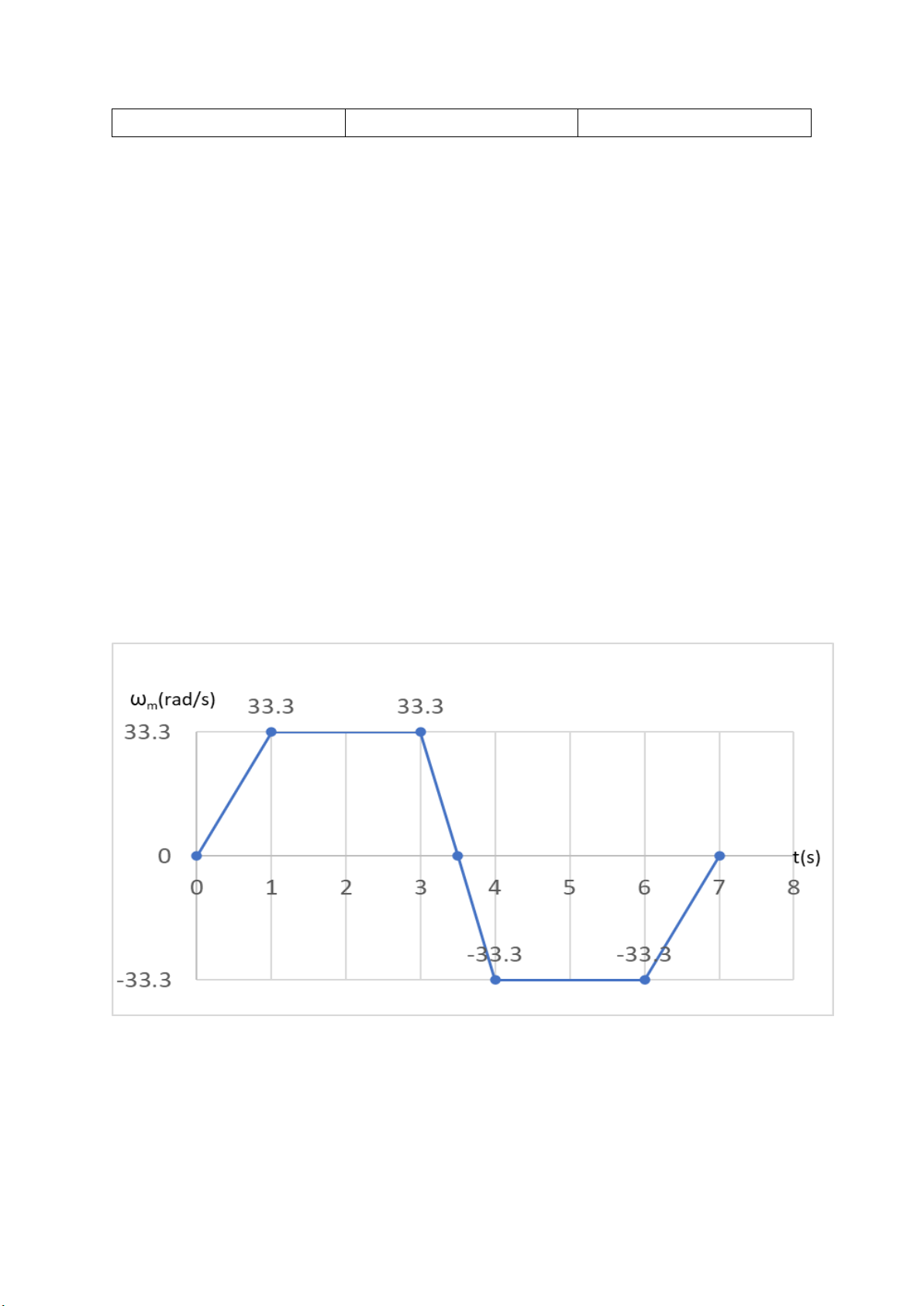
Ta biểu diễn kết quả tính toán ở bảng sau : t(s) u(t) ꞷ(t) 0 0 0 1 5 33.3 3 5 33.3 3.5 0 0 4 -5 -33.3 6 -5 -33.3 9 7 0 0
Bảng 1. 1 Tốc độ mong muốn theo thời gian
Dựa vào bảng trên ta xác định được quá trình hoạt động động cơ:
- Quá trình tải chạy tới:
Từ 0 đến 1s: tốc độ quay (𝝎𝒎) của động cơ tăng từ 𝟎 rad/s đến 𝟑𝟑. 𝟑 rad/s
Từ 1 đến 3s: động cơ hoạt động ổn định với tốc độ quay (𝝎𝒎) = 𝟑𝟑. 𝟑 rad/s
Từ 3 đến 3.5s: tốc độ quay của động cơ giảm về (𝝎𝒎) = 𝟎 rad/s
- Quá trình tải chạy lùi:
Từ 3.5 đến 4s: động cơ đảo chiều, độ lớn tốc độ quay của tăng dần lên 𝝎𝒎 =𝟑𝟑. 𝟑 rad/s
Từ 4 đến 6s: động cơ hoạt động ổn định với độ lớn tốc độ quay �� = 33.3 rad/s
Từ 6 đến 7s: tốc độ quay của động cơ giảm về �� = 0 rad/s và dừng.
Hình 1. 3 Đồ thị biểu diễn tốc độ quay (ωm) của tải 10
1.3.1.2 Momen điện từ của động cơ
- Theo định luật II Newton ta có: d ω d ωt T M + r2 M +r f EM =J L (1.2) M dt dt d ω Với J M M
là mô men yêu cầu để quay trục rotor của động cơ, vì chưa dt
chọn động cơ nên tạm thời bỏ qua giá trị này, sau khi chọn được động cơ
ta sẽ kiểm nghiệm lại, để thuận lợi cho việc tính toán ta cũng tạm thời bỏ
qua ngoại lực ��. Lúc này ta xác định công thức sơ bộ momen điện từ của động cơ là: 2 d ωM T =r M (1.3) em dt = 33.3 =
Trong giai đoạn từ 0 – 1s: T 0.152.120 .
89.91(N . m ) EM 1 = 0 =
Trong giai đoạn từ 1 – 3s: T 0.152.120 . 0(N . m) EM 2 = −66.6
Trong giai đoạn từ 3 – 4s: T 0.152.120 . EM = -359,64 (N.m) 1 0
Trong giai đoạn từ 4 – 6s: T =0.152.120 . =0 EM (N.m) 2 33.3
Trong giai đoạn từ 6 – 7s: T =0.152.120 . =89.91 EM (N.m) 1
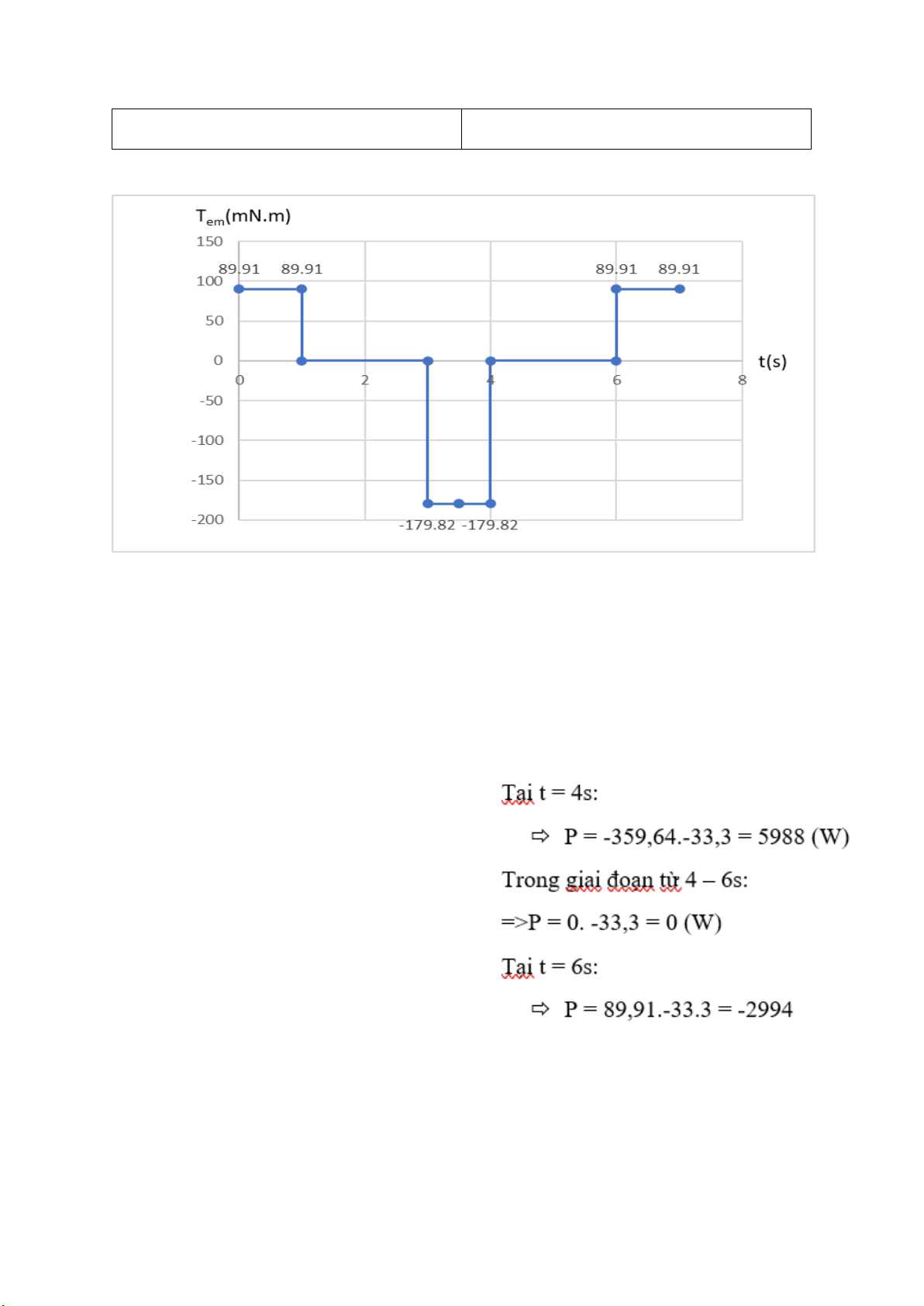
Ta biểu diển kết quả ở bảng sau: t(s) Tem(N.m) 0 → 1 89.91 1 →3 0 3 → 4 -359,64 4 →6 0 11 6 → 7 89.91
Bảng 1. 2 Giá trị momen điện từ yêu cầu của tải theo thời gian
Hình 1. 4 Đồ thị biểu diễn momen điện từ (Tem) của tải
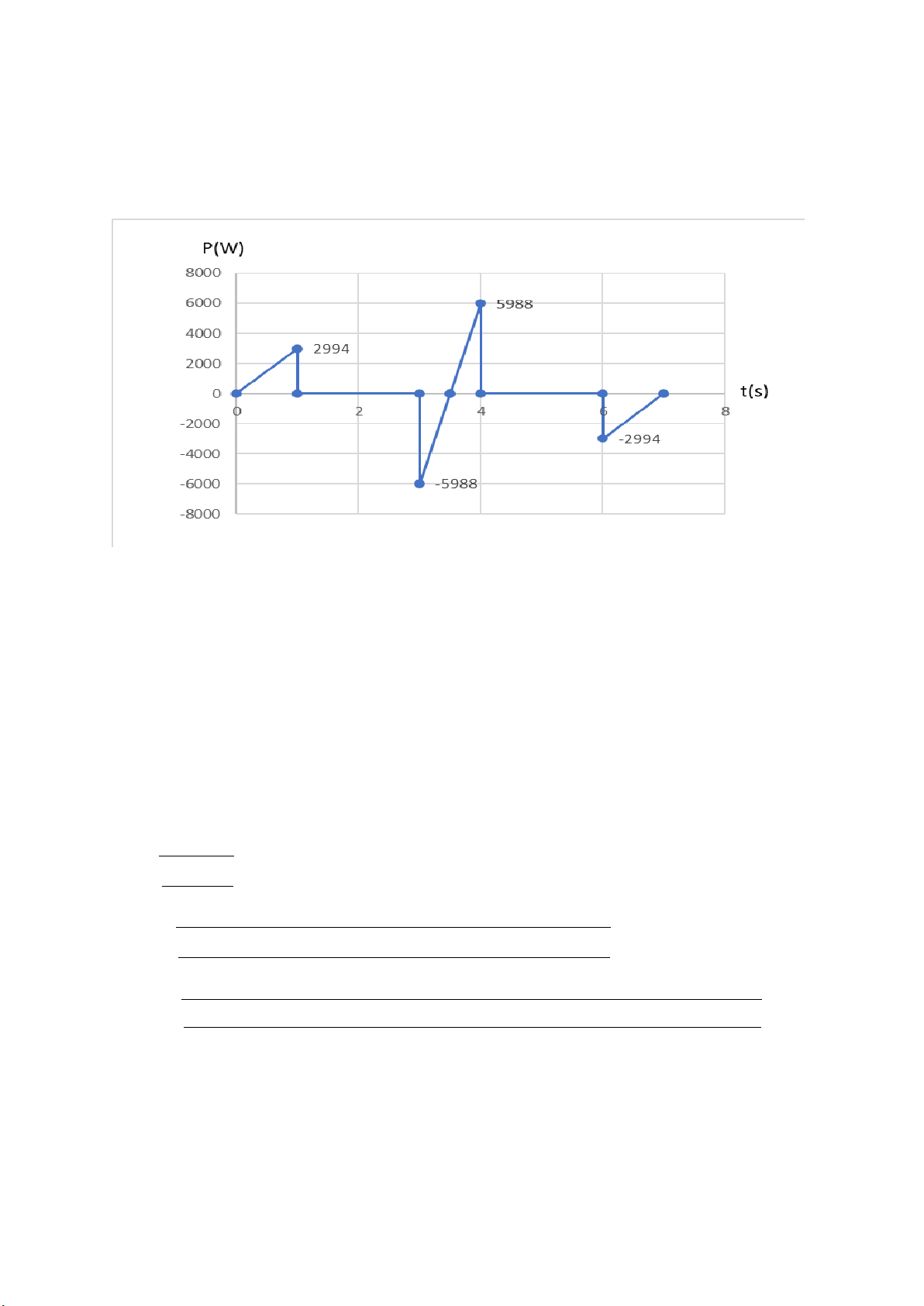
1.4 Công suất tức thời: P = T ⍵ em m Tại t = 1s: ⇨ P = 89,91.33.3 = 2994 (W) Trong giai đoạn 1 – 3s: ⇨ P = 0. 33,3 = 0 (W) Tại t = 3s:
⇨ P = 89,91.2.-33.3 = -5988 (W) Tại t = 3.5s: ⇨ P = -359,64.0 = 0 (W) 12 Tại t = 7s: ⇨ P = 89,91.0 = 0 (W)
Hình 1. 5 Đồ thị công suất động cơ
-Ta có được giá trị mô men cực đại và giá trị công suất cực đại yêu cầu
của tải: ��� = 179.82 (N.m) và � = 5988 (W)
- Từ đây ta vẽ được đồ thị biểu diễn tốc độ quay (��), momen điện từ
(���) và công suất (�) yêu cầu của tải.
❖ Tiếp theo ta đi tính mô men đẳng trị 𝑇đ𝑡 và công suất đẳng trị 𝑃đ𝑡:
- Mô men đẳng trị �đ�: em T = i dt Σ (1.5) △ t i
√Σ T 2 △ t em1 1 em 2 2 em 3 3 em4 4 em5 5 em 6
= √T 2 ∆ t +T 2 ∆ t + T2 ∆ t +T 2 ∆ t +T 2 ∆ t +T2 ∆ t 6
Σ △ t i
= √ 89.912+02 х 2+(−179.82)2 х 0.5+(−179.82)2 х 0.5+02 х 2+89.912 83.24( N . m) 7 13
= 83.24 ( N .m )
- Công suất đẳng trị �đ� : i P = i (1.6) đt ∑ △ t i
√∑ P2 Δt
+ P2 △ t + P2 △ t + P2 △ t 1 1 2 2 4 5 6 5 8 = 3 4 6 ∑ Δti
√P2 △ t + P2 △ t + P2 △ t √
= 29942 х 1+(−5988)2 х 0.5+59882 х 0.5+(−2994)2 х 1 7 = 2771.9 (W)
❖ Tốc độ cực đại mong muốn: ω ∗60 max - n = max 2 π vòng n = 33.3∗60 max = 318 ( ) 2 π phút
1.5 Phân tích chọn phương án truyền động cho động cơ:
1.5.1 Các trạng thái hoạt động của động cơ: 14
1.5 Phân tích chọn phương án truyền động cho động cơ:
1.5.1 Các trạng thái hoạt động của động cơ:
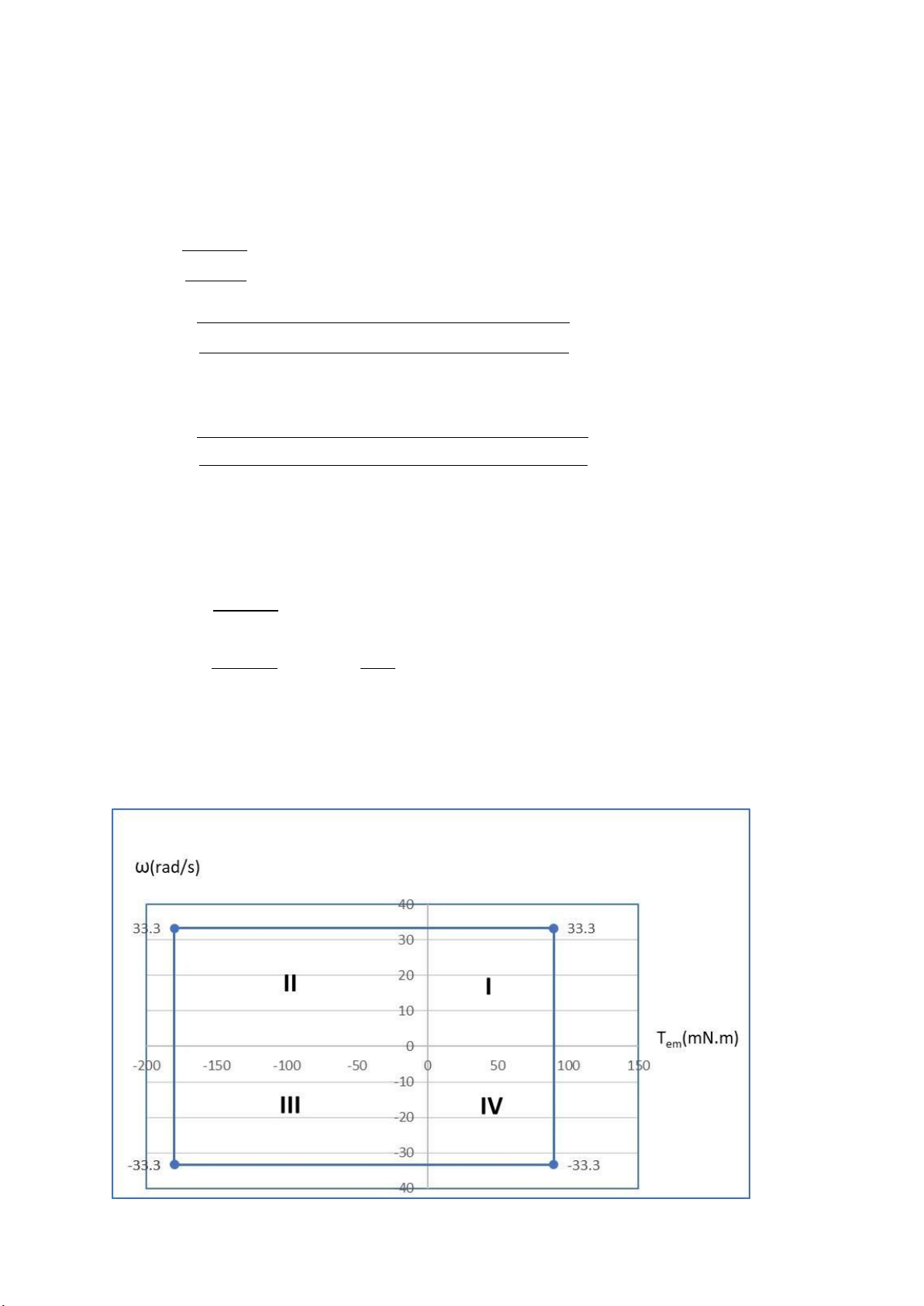
Hình 1. 6 Đồ thị trạng thái hoạt động của động cơ
Từ đồ thị biểu diễn các trạng thái hoạt động của động cơ Hình 1.6 và đồ
thị tốc độ mong muốn Hình 1.5a ta xác định được các trạng thái hoạt động
của động cơ ở từng giai đoạn cụ thể:
- Từ 0 đến 3s: Động cơ hoạt động ở góc phần tư thứ I (chế độ động cơ)
- Từ 3 đến 3.5s: Động cơ hoạt động ở góc phần tư thứ II (chế độ máy phát)
- Từ 3.5 đến 4s: Động cơ hoạt động ở góc phần tư thứ III (chế độ động cơ)
- Từ 4 đến 7s: Động cơ hoạt động ở góc phần tư thứ IV (chế độ máy phát)
Ta suy ra được các trạng thái hoạt động của động cơ: - Khởi động - Hãm - Đảo chiều
1.5.2 Chọn phương án khởi động động cơ:
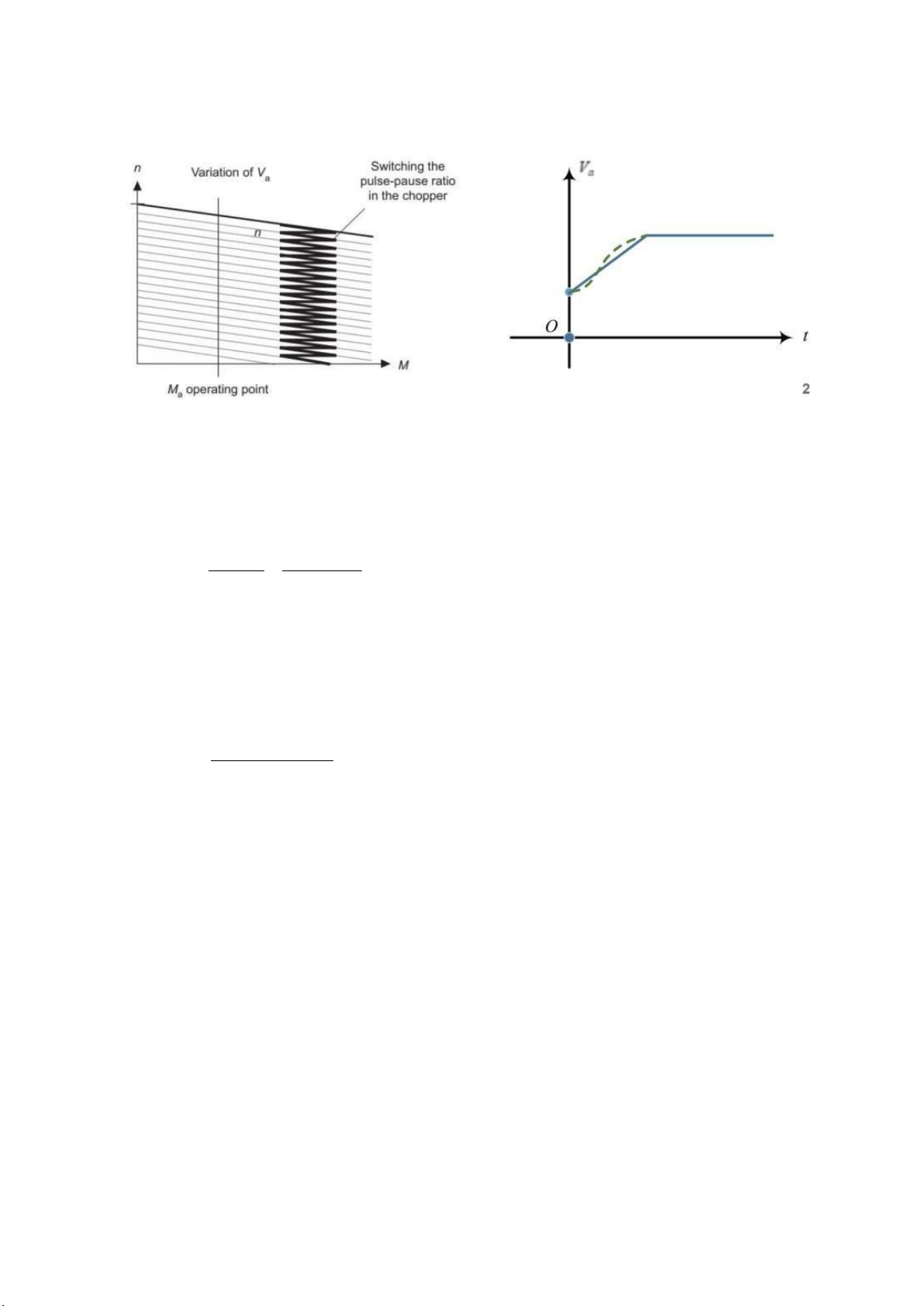
Khởi động mềm là sử dụng bộ biến đổi điện tử để điều chỉnh trơn điện áp
phần ứng Va của động cơ, tăng dần từ một giá trị ban đầu Va . Điện áp
phần ứng được lập trình và cho phép đặt tham số để tăng theo quy luật
tuyến tính/phi tuyến từ một giá trị được xác định đến một điện áp có định mức. 15
Hình 1. 7 Đồ thị mô tả khởi động mềm
1.5.3 Chọn phương án đảo chiều động cơ:
- Phương trình đặc trưng khi đảo chiều: −V ađm R a + ω = − K ф 2 Mdt (1.11) e đm K K ф e M đm
- Nếu vẫn giữ nguyên điện áp định mức, dòng điện khi đảo chiều có giá trị
rất lớn, đốt nóng động cơ. Đồng thời gây ra mô men đảo chiều rất lớn =>
Gây xung lực, vặn xoắn rất nguy hiểm cho động cơ, tải và hệ thống sản xuất. −V −K ф2 + I = a, đm e đm a,đc R
(đảo chiều điện áp phần ứng) (1.12) a
❖ Kết luận: Để tối ưu phần cứng cũng như giảm chi phí cho hệ thống,
trong đề tài này ta chọn đảo chiều động cơ điện kích từ độc lập bằng cách
đảo chiều điện áp phần ứng.
1.5.4 Chọn phương án hãm dừng cho động cơ:
- Hãm động năng là trạng thái động cơ làm việc như một máy phát mà
năng lượng cơ học của động cơ đã tích lũy được trong quá trình làm việc
trước đó biến thành điện năng, tạo ra mômen hãm. 16
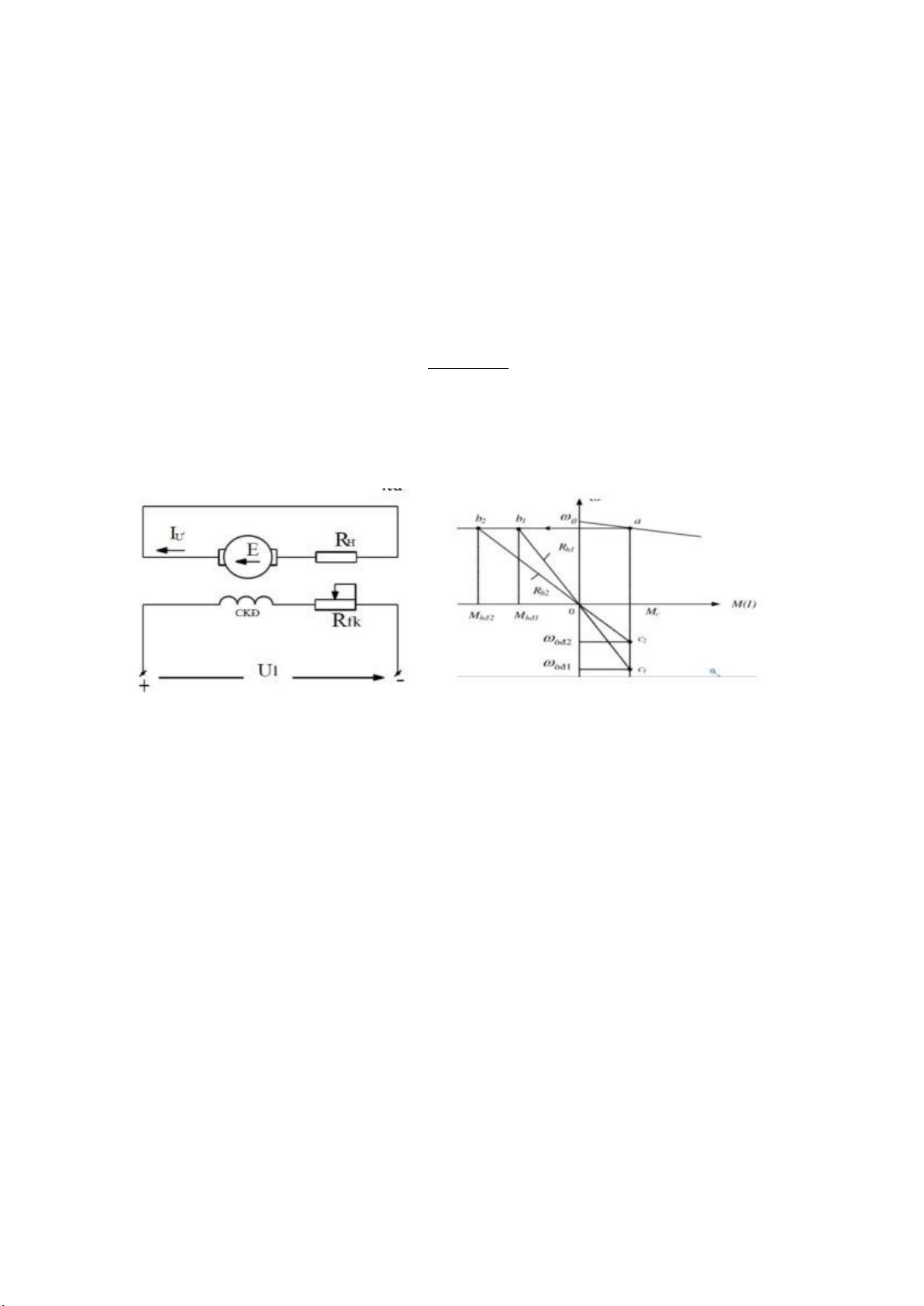
- Ta xét trường hợp hãm động năng kích từ độc lập: Khi động cơ đang
quay muốn thực hiện hãm động năng kích từ độc lập ta cắt phần ứng động
cơ khỏi lưới điện một chiều và đóng vào một điện trở hãm, còn mạch kích
từ vẫn nối với nguồn như cũ. Tại thời điểm ban đầu, tốc độ động cơ vẫn có giá trị �ℎđ nên: + E = ф hđ K ω e hđ (1.13)
Và dòng điện hãm ban đầu, mô-men hãm ban đầu:
−K ф ω e hđ I hđ= ∈ 0 R a + R h M = ф ∈ hđ K I 0 M hđ
Hình 1. 8 Sơ đồ mạch điện và đồ thị đặc tính cơ - điện của
hãm động năng
- Khi hãm động năng kích từ độc lập tiêu thụ ít năng lượng từ lưới. Năng
lượng chủ yếu được tạo do động năng của động cơ tích được trong quá trình làm việc.
1.5.5 Chọn phương án điều khiển tốc độ động cơ:
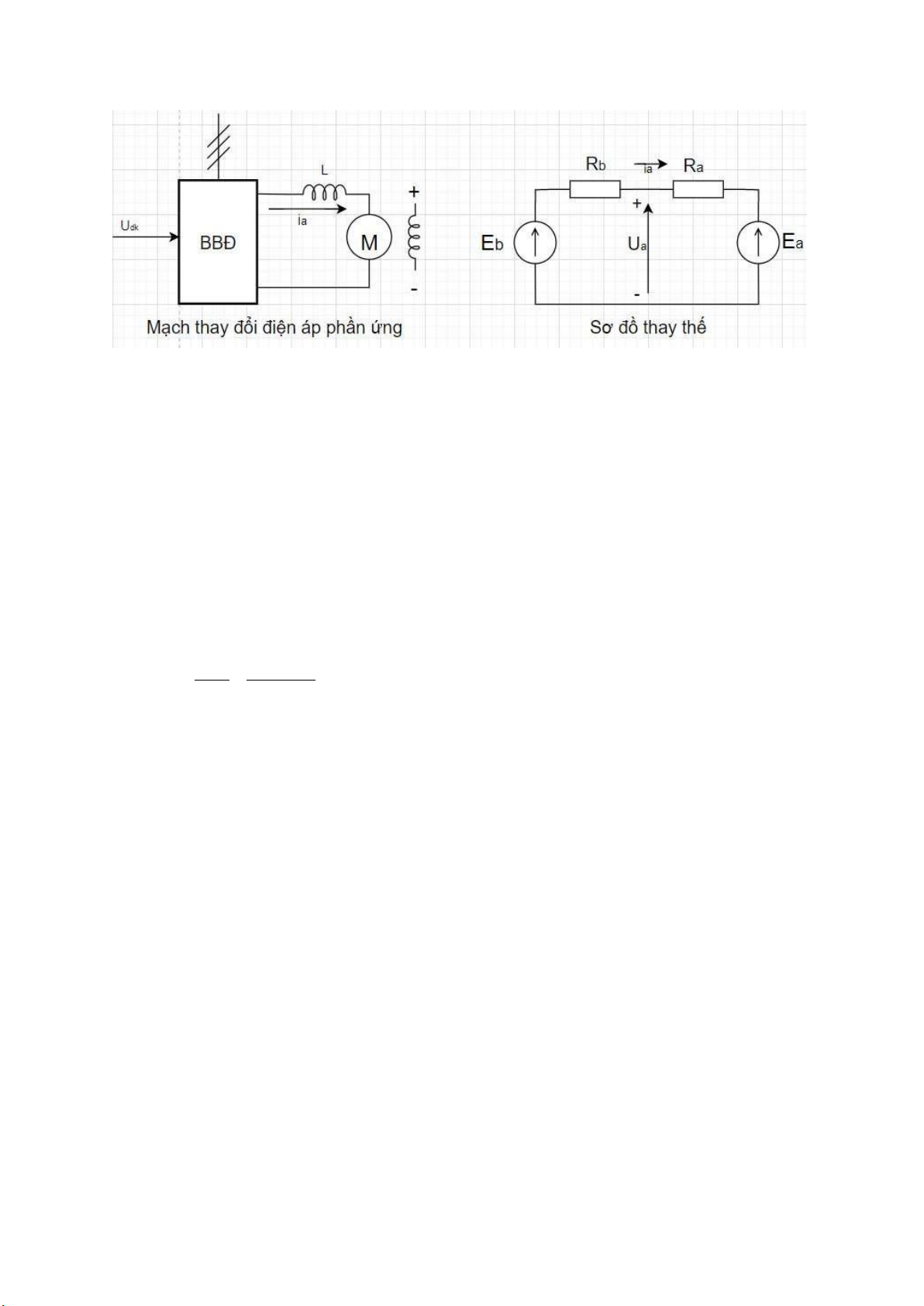
❖ Phương pháp điều chỉnh điện áp cho phần ứng động cơ: 17
Hình 1. 9 Sơ đồ mạch thay đổi điện áp phần ứng và sơ đồ thay thế
- Để điều chỉnh điện áp phần ứng động cơ một chiều cần có thiết bị nguồn
như máy phát điện một chiều kích từ độc lập, các bộ chỉnh lưu điều khiển
v.v… Các thiết bị nguồn này có chức năng biến năng lượng xoay chiều
thành một chiều có sức điện động Eb điều chỉnh được nhờ tín hiệu điều khiển Uđk.
- Chúng ta có phương trình đặc tính cơ của hệ truyền động điện một chiều
điều chỉnh điện áp phần ứng khi từ thông giữ không đổi và bằng định mức: −E R + R ω= b − a b M (1.14) K ϕ 2 e
Ke K M ϕ
- Sự khác nhau giữa đặc tính cơ của động cơ và đặc tính cơ của hệ truyền
động điện là độ sụt tốc độ Δωcủa hệ truyền động lớn hơn do sự xuất hiện
điện trở trong Rb của bộ biến đổi. 18
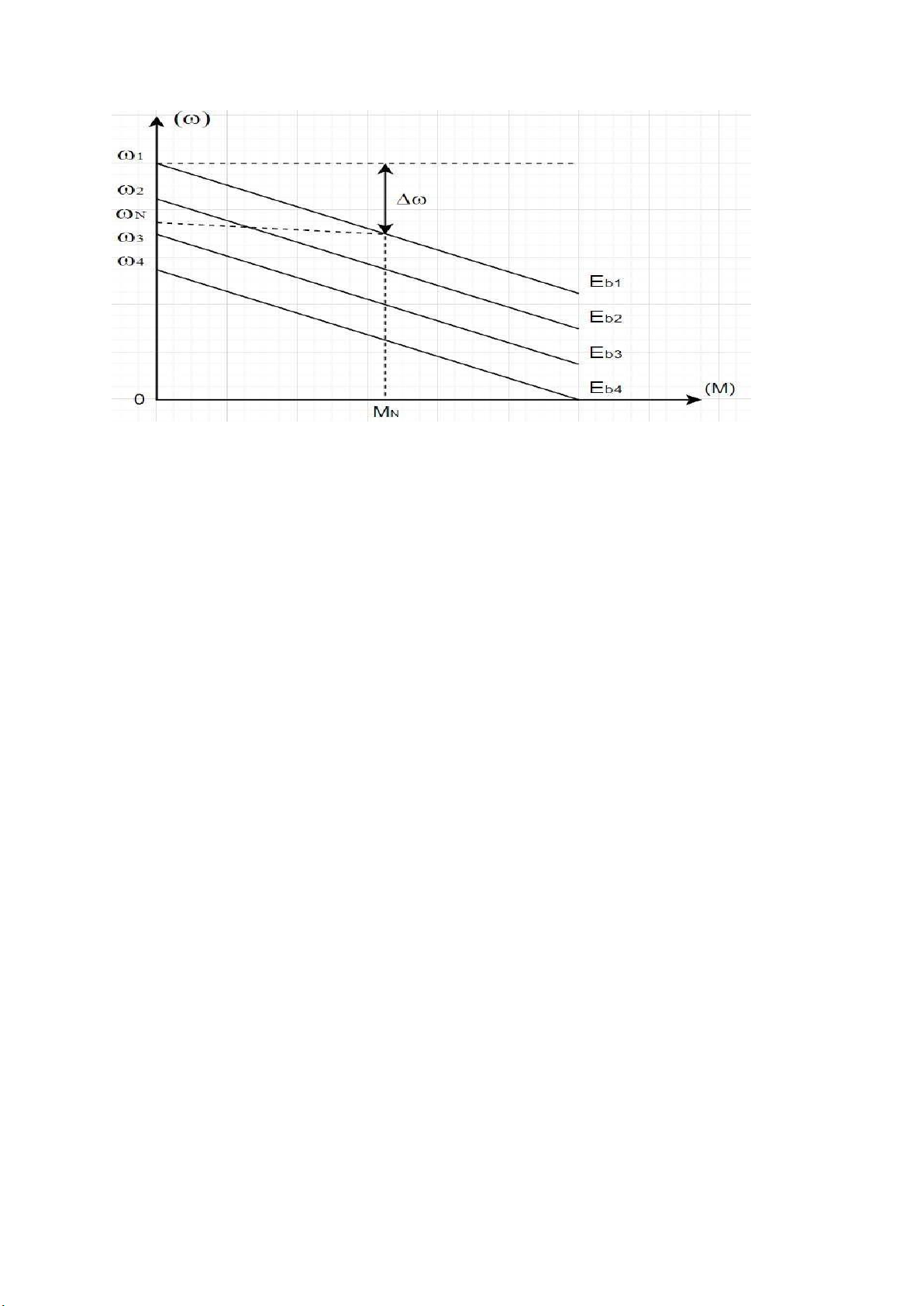
Hình 1. 10 Đồ thị đặc tính cơ – điện khi điều chỉnh điện áp
phần ứng động cơ
- Khi điều chỉnh giá trị điện áp Uđk ta nhận được các giá trị �� khác nhau
và được họ đặc tính cơ song song với các giá trị 0 (ứng với �� ) khác
nhau. Ta nhận thấy khi điều chỉnh điện áp phần ứng công suất động cơ
tăng tuyến tính với tốc độ còn khả năng sinh mô men của động cơ không đổi.
1.6 Tính chọn công suất động cơ:
1.6.1 Tính chọn động cơ:
❖ Sau khi tính toán các thông số yêu cầu của tải ở mục 1.2.1 ta có thể tính
toán và đưa ra các thông số định mức cho động cơ:
- Với các giá trị đẳng trị của momen và công suất đã tính, ta phải lựa chọn động cơ sao cho:
+ Pdt =(1 ÷ 1.3) Pdt
+ T đm=(1÷ 1.3)T đt
- Chọn hệ số dự trữ k = 1.3, vậy nên phải chọn động cơ có thông số định mức như sau: 19
��� = 1.3�đ� = 1.3 × 83.24 = 108.212 (�. �)
��� = 1.3�đ� = 1.3 × 2771.9 = 3603.47 (�)
���� = 318 (vòng/phút)
- Điện áp định mức: U = đm
220VAC , 50 Hz
- Công suất định mức: P = đm 3700 W vòng - Tốc độ định mức: n =2960 đm phút - Hiệu suất: ɳ=50%
- Hệ số công suất: cosφ=0.84
Công suất tác dụng của động cơ:
P = 3700 =7400 (W ) 1 0.5
Dòng điện định mức mỗi pha: P1 = 7400 = I = 13.34( A ) đm
m U f cosφ đm 3 ×220 × 0.84
Điện áp vào của bộ nghịch lưu =3 U = 2 U →U
×220 √2≈ 466.7 (V ) fmax 3 d d 2
Điện áp ngược lớn nhất đặt lên IGBT: U =U =466.7(V ) ng d
Vì tải đấu hình Y nên dòng cực đại qua mỗi IGBT bằng dòng sau mạch
nghịch lưu, tức: I =I =13.34 ( A) d đm
Tuy nhiên, khi khởi động động cơ, dòng mở máy tang nên ta phải chọn
IGBT có thông số giới hạn cao hơn. Chọn K =2.5 m
Chọn hệ số dự trữ: K =1.6 =1.2 u và K I . Chọn IGBT có: U
=K ×U =1.6 × 466.7=746.72 (V ) ng . max u ng I
=K ×K × I =2.5× 1.2× 13.34=40.02 ( A ) d . max m I d
Vậy chọn IGBT loại FGA50N120ANTD có : 20
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32