Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
ProcessIndustry-agitators,pumps,fans,compressors
Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Tài liệu gồm 25 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:
Preview text:
TRUYỀN ĐỘNG ĐIỆN CHƯƠNG 1 KHÁI NIỆM CHUNG
Ngành Kỹ thuật Điều khiển & Tự động hóa Khoa Điện PGS. TS. Lê Tiến Dũng KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
Chương 1. KHÁI NIỆM CHUNG 1.1. Khái niệm
1.2. Cấu trúc và phân loại hệ truyền động điện
1.3. Nguyên lý phần cơ của hệ truyền động điện
1.4. Nguyên lý biến đổi năng lượng điện - cơ
1.5. Khái niệm đặc tính cơ (Torque – Speed characteristic)
1.6. Đặc tính cơ - điện (Current – Speed characteristic)
1.7. Các trạng thái làm việc của truyền động điện
1.8. Các loại tải của hệ truyền động điện
1.9. Ứng dụng của điều khiển truyền động điện 2 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng 1.1. Khái niệm
Truyền động điện là sử dụng các loại động cơ điện để biến đổi điện năng thành cơ năng
truyền động cho các tải/máy sản xuất, đồng thời có khả năng điều khiển quá trình biến đổi
năng lượng điện - cơ này.
Hệ truyền động điện là một tập hợp các phần tử, thiết bị phục vụ cho việc biến đổi năng
lượng điện - cơ cũng như truyền tín hiệu thông tin và xử lý các dữ liệu để điều khiển quá
trình biến đổi năng lượng đó. 3 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng 4 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
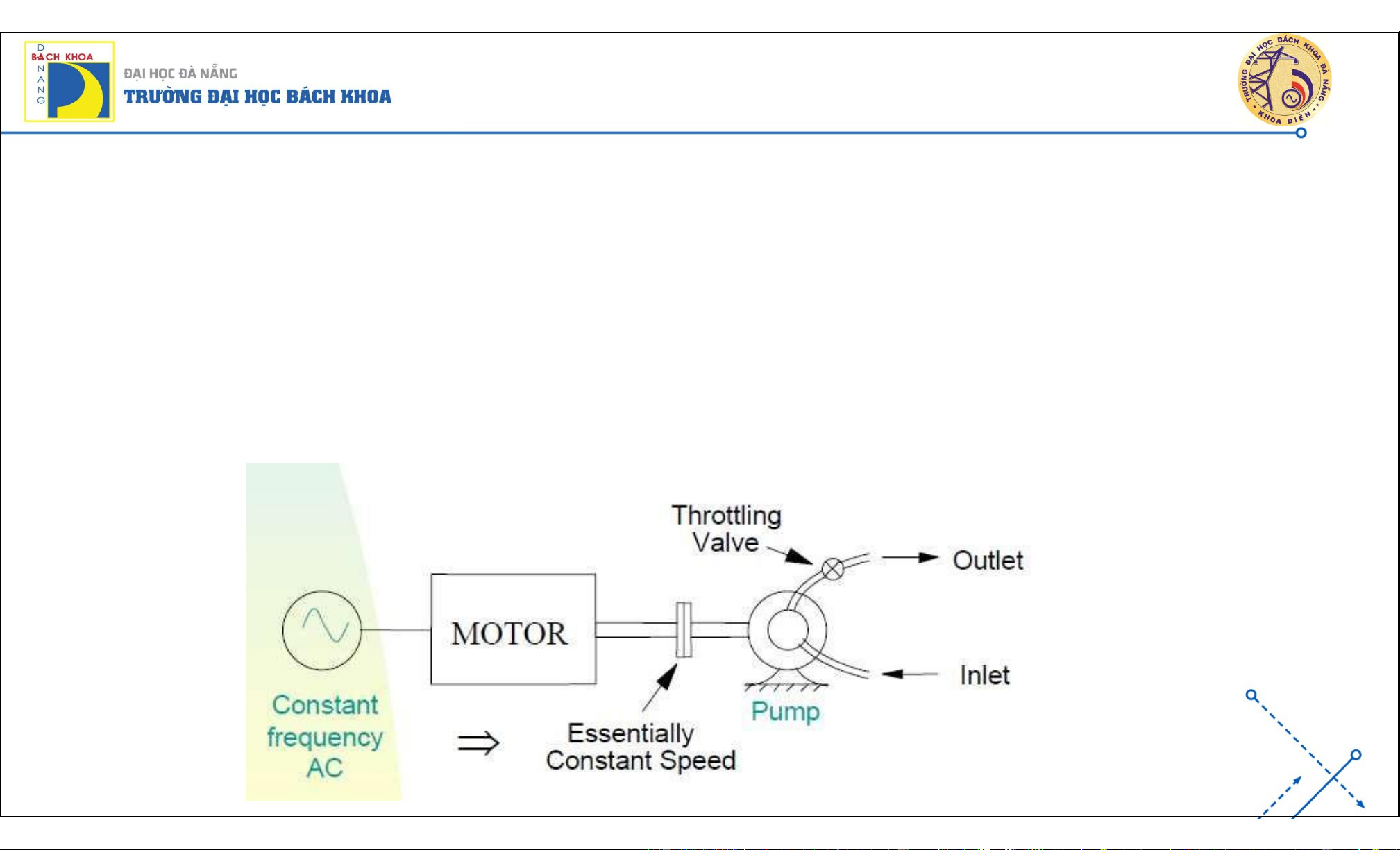
Hệ truyền động điện đơn giản
• Nguồn điện AC với tần số không đổi –> Máy bơm chạy với tốc độ là hằng số
• Không hiệu quả: Tỏa nhiệt trong động cơ và bắt buộc phải sử dụng van tiết lưu để điều chỉnh lưu lượng.
• Khó tự động hóa, không có điều chỉnh tự động. 5 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
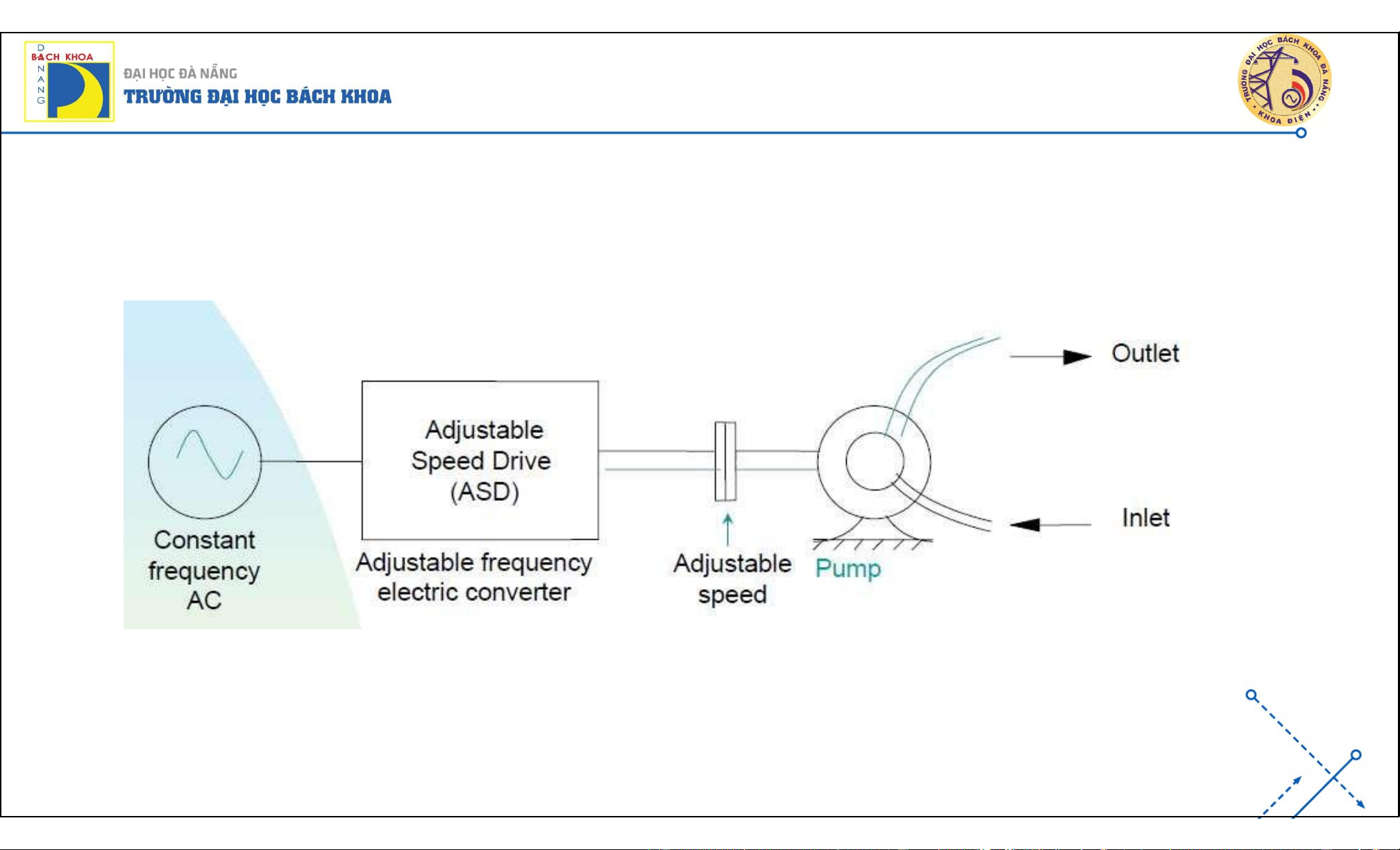
Hệ truyền động có khả năng điều chỉnh tốc độ
Adjustable Speed Drives (ASDs)
• Truyền động ở tốc độ phù hợp với tải.
• Hiệu quả cao, không cần sử dụng van tiết lưu. 6 KHOA ĐIỆN
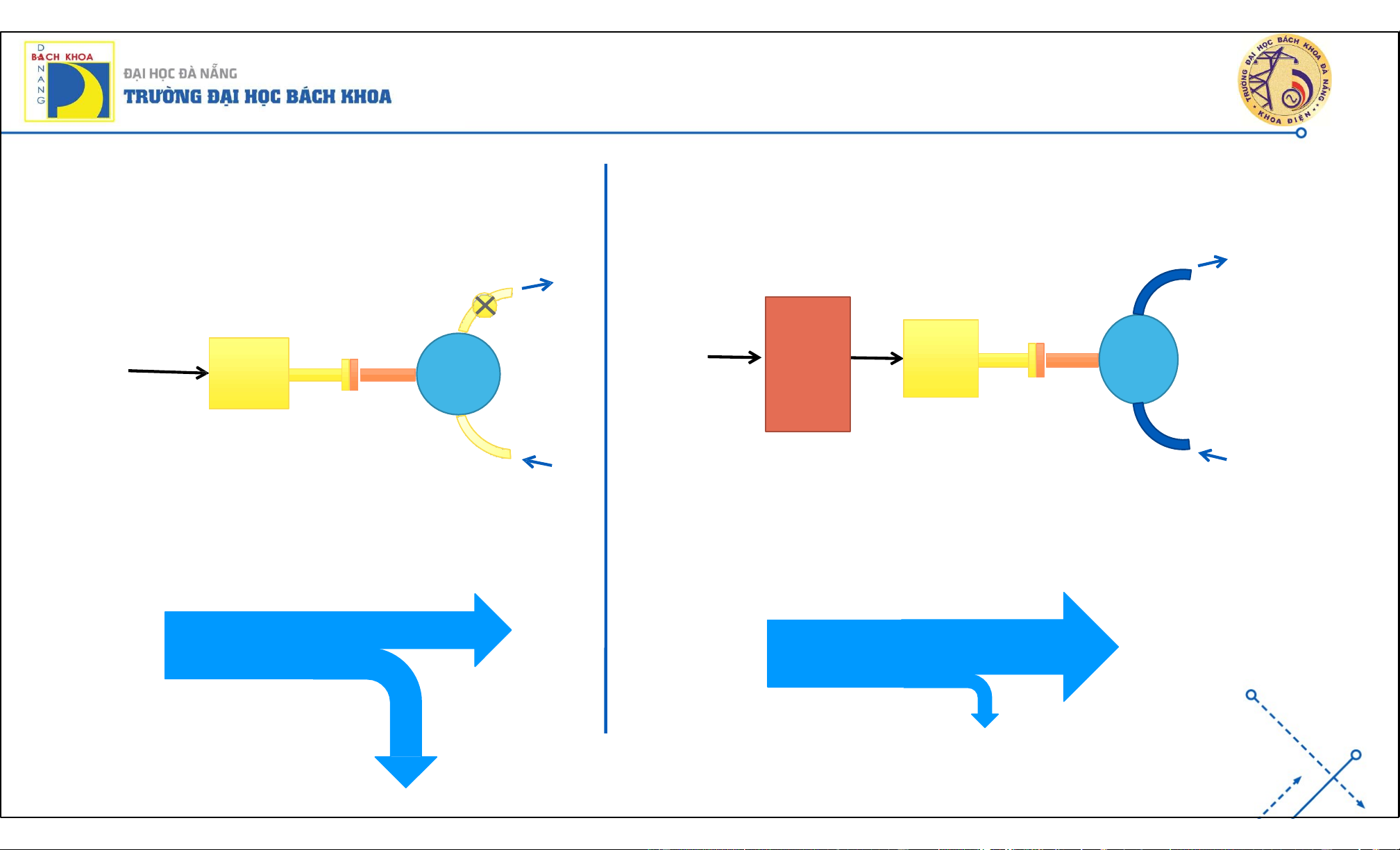
PGS. TS. Lê Tiến Dũng valve NGUỒN NGUỒN B Ộ ĐỘNG B BI ƠM ĐỘNG ẾN BƠM CƠ ĐỔI CƠ Power Power out Power Power out In In Power loss Power loss Mainly in valve 7 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
Hệ truyền động điện có vai trò quan trọng trong sản xuất công nghiệp, nó thực hiện
nhiệm vụ: Biến đổi điện năng thành cơ năng quay máy sản xuất đồng thời điều khiển sự
biến đổi dòng năng lượng này theo yêu cầu công nghệ của máy và dây chuyền sản xuất.
Khi nghiên cứu truyền động điện người ta cần quan tâm giải quyết hai vấn đề:
+ Vấn đề thứ nhất là nghiên cứu sự biến đổi năng lượng của các hệ truyền động điện và
phương pháp điều khiển dòng năng lượng đó, ta gọi đó là phần “Cơ sở truyền động điện”.
+ Vấn đề thứ hai là nghiên cứu điều khiển các hệ truyền động trong đó cần phải xây
dựng cấu trúc điều khiển các hệ truyền động và thiết kế các thuật toán điều khiển, phần này
được gọi là “Điều khiển truyền động điện”. 8 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
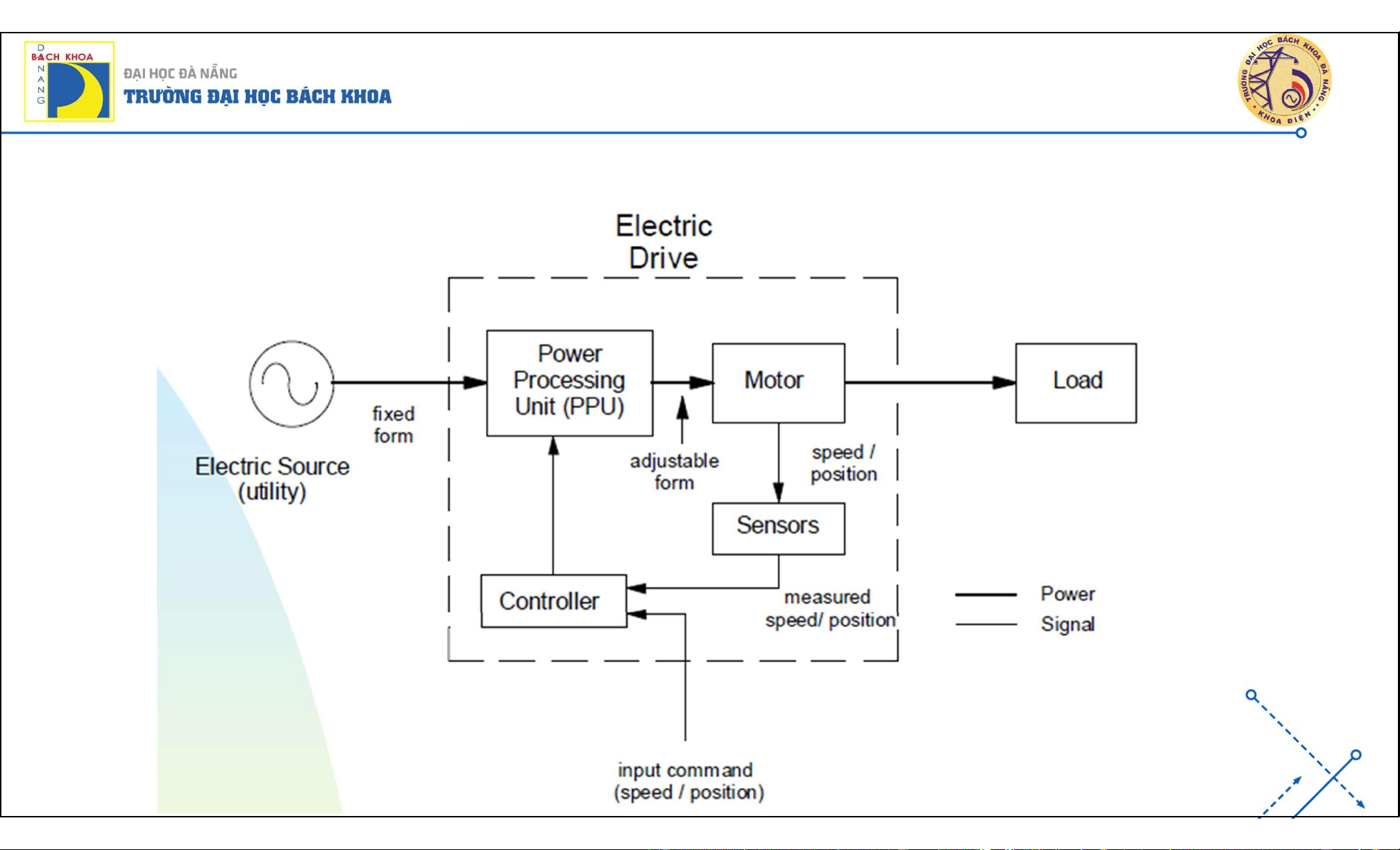
1.2. Cấu trúc và phân loại hệ truyền động điện 9 KHOA ĐIỆN
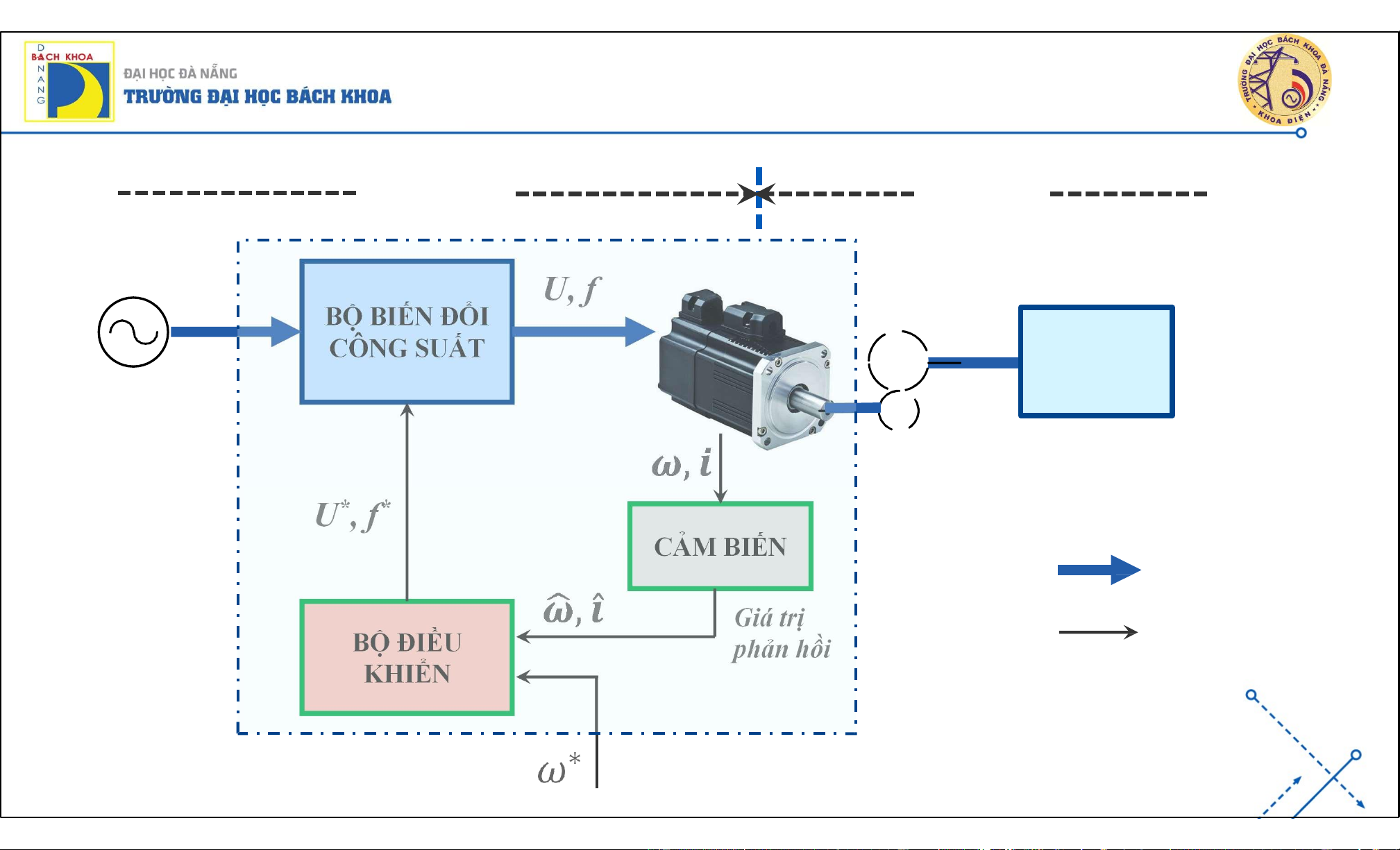
PGS. TS. Lê Tiến Dũng PHẦN ĐIỆN PHẦN CƠ U , f 0 0 U, f BỘ BIẾN ĐỔI CÔNG SUẤT TẢI NGUỒN ĐIỆN U*, f* CẢM BIẾN Động lực Giá trị BỘ ĐIỀU phản Điều hồi khiển KHIỂN
Giá trị đặt/mong muốn 10 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
Hệ truyền động điện có 2 phần chính: Phần động lực và Phần điều khiển
PHẦN ĐỘNG LỰC bao gồm:
+ Bộ biến đổi công suất: Các bộ biến đổi thường dùng trong các hệ truyền động điện hiện đại
là các bộ biến đổi điện tử công suất như bộ chỉnh lưu, bộ băm điện áp, bộ điều áp xoay chiều, bộ
biến tần, … trong đó các linh kiện điện tử công suất được sử dụng. Bên cạnh đó, các hệ truyền
động điện truyền thống còn sử dụng bộ biến đổi máy điện (máy phát một chiều, xoay chiều), bộ
biến đổi từ (khuếch đại từ, cuộn kháng bão hòa).
+ Động cơ điện có các loại: Động cơ điện một chiều, động cơ điện xoay chiều không đồng
bộ, động cơ điện xoay chiều đồng bộ và các loại động cơ đặc biệt khác v.v... 11 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
PHẦN ĐIỀU KHIỂN gồm:
+ Các cảm biến để đo phản hồi tốc độ/dòng điện của động cơ. Đối với các hệ truyền động điện
điều khiển kín (closed-loop), các thông tin tín hiệu phản hồi được đưa vào bộ điều khiển.
+ Bộ điều khiển sử dụng vi xử lý, vi điều khiển, máy tính công nghiệp, PLC,… được lập trình
các thuật toán điều khiển truyền động và điều chỉnh quá trình công nghệ. Từ các thông tin phản
hồi tốc độ/dòng điện cùng với giá trị đặt/mong muốn ở đầu vào, các thuật toán điều khiển thực
hiện tính toán ra các giá trị đầu vào U*, f* của động cơ cần thiết để điều khiển tốc độ thực của
động cơ bám theo giá trị đặt/mong muốn.
+ Ngoài ra còn có các thiết bị điều khiển, đóng cắt phục vụ công nghệ và cho người vận hành.
Đồng thời một số hệ truyền động có cả mạch ghép nối với các thiết bị tự động khác trong một dây
chuyền sản xuất, ghép nối với các thiết bị điều khiển cấp trên. 12 KHOA ĐIỆN
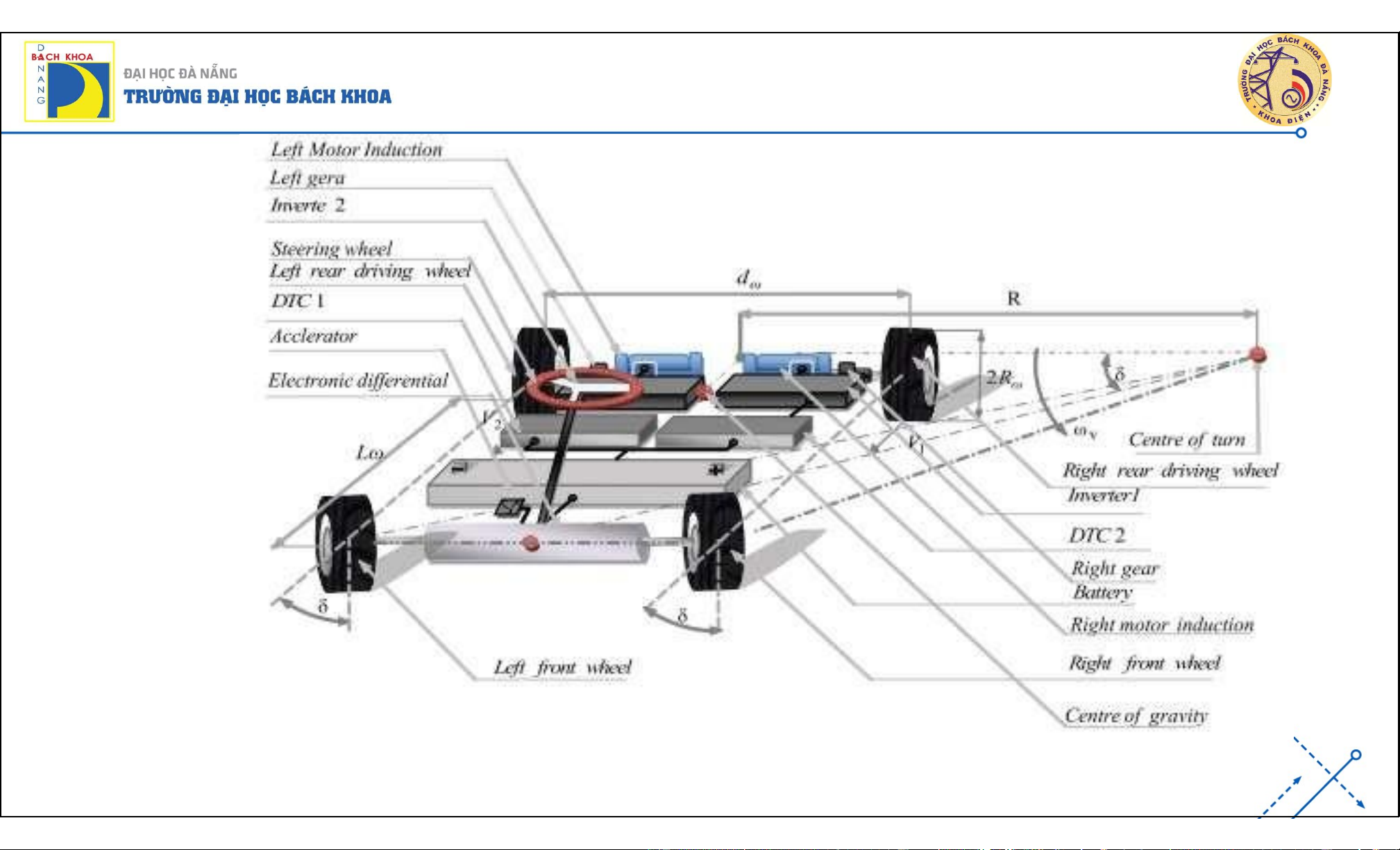
PGS. TS. Lê Tiến Dũng Ví dụ minh họa: hệ truyền động điện sử dụng động cơ xoay chiều 3 pha không đồng bộ để truyền động cho xe điện
Source: Gasbaoui, Brahim, et al. "The efficiency of direct torque control for electric vehicle behavior 13
improvement." Serbian Journal of Electrical Engineering 8.2 (2011): 127-146. KHOA ĐIỆN
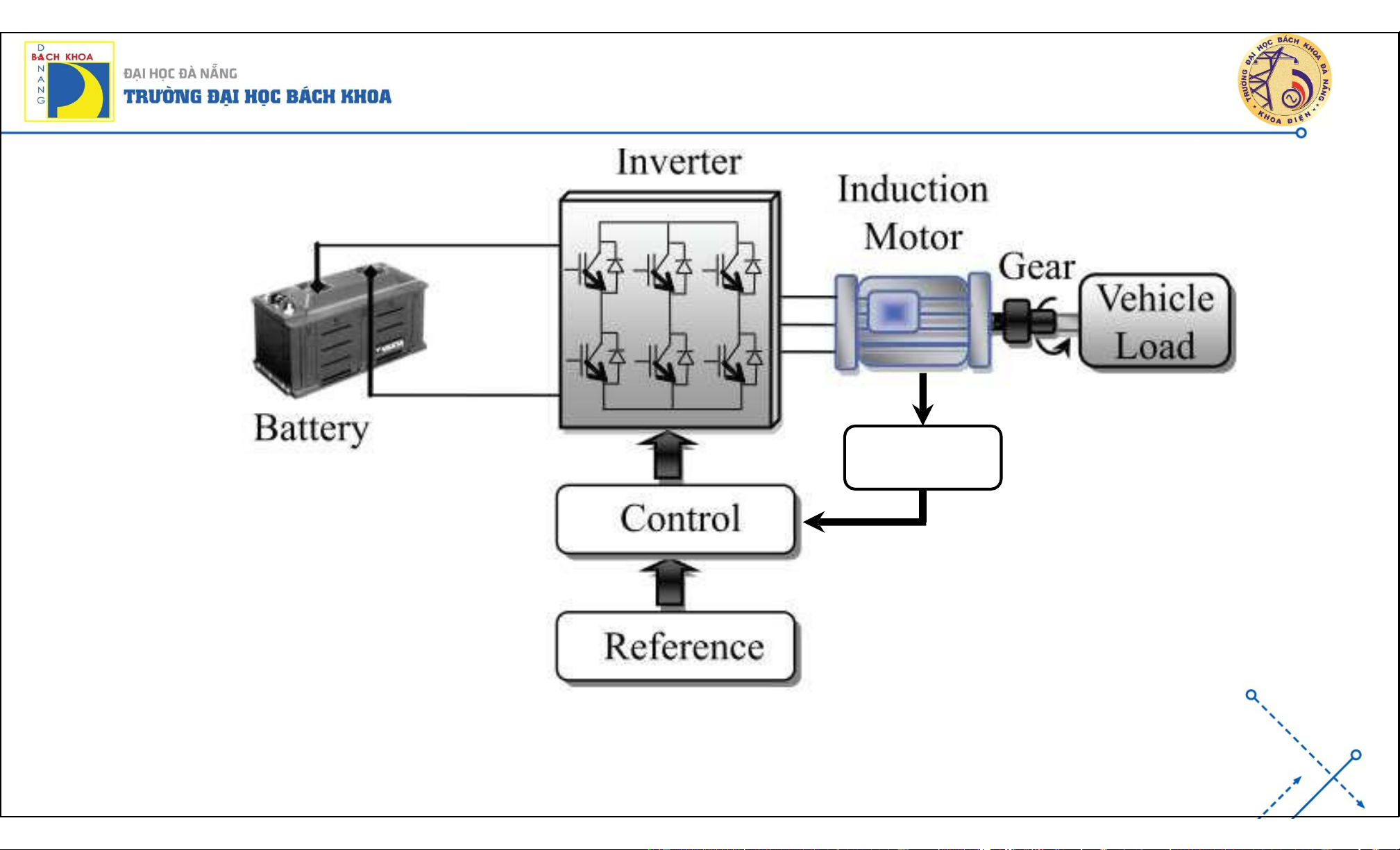
PGS. TS. Lê Tiến Dũng Sensors Ví dụ minh họa: hệ truyền động điện sử
dụng động cơ xoay chiều
3 pha không đồng bộ để
truyền động cho xe điện
Source: Gasbaoui, Brahim, et al. "The efficiency of direct torque control for electric vehicle behavior improvement." 14
Serbian Journal of Electrical Engineering 8.2 (2011): 127-146. KHOA ĐIỆN
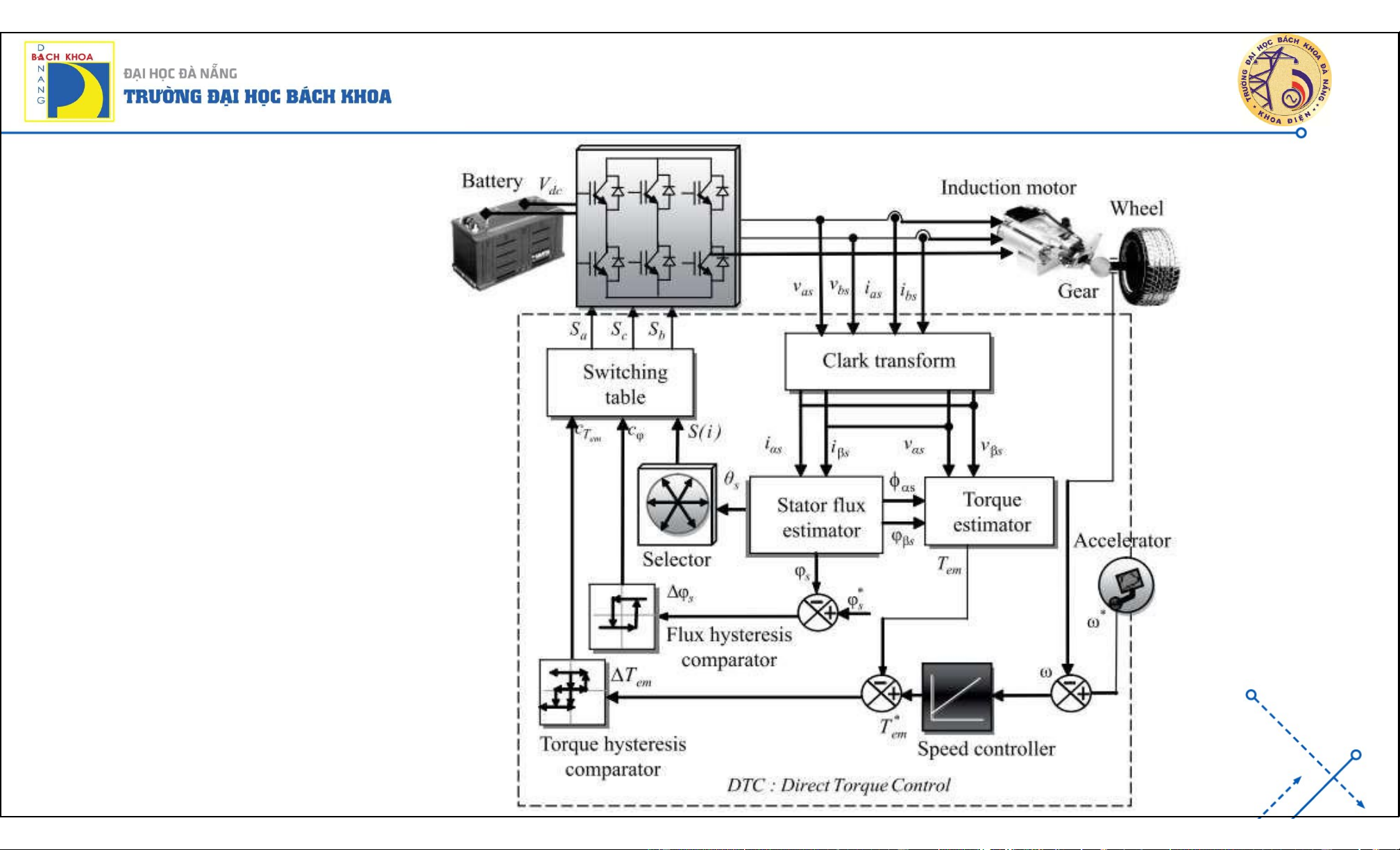
PGS. TS. Lê Tiến Dũng Ví dụ minh họa: hệ truyền động điện sử
dụng động cơ xoay chiều
3 pha không đồng bộ để
truyền động cho xe điện (tiếp theo) Source: Gasbaoui, Brahim, et al. "The efficiency of direct torque control for electric vehicle behavior improvement." Serbian Journal of Electrical Engineering 8.2 (2011): 127-146. 15 KHOA ĐIỆN
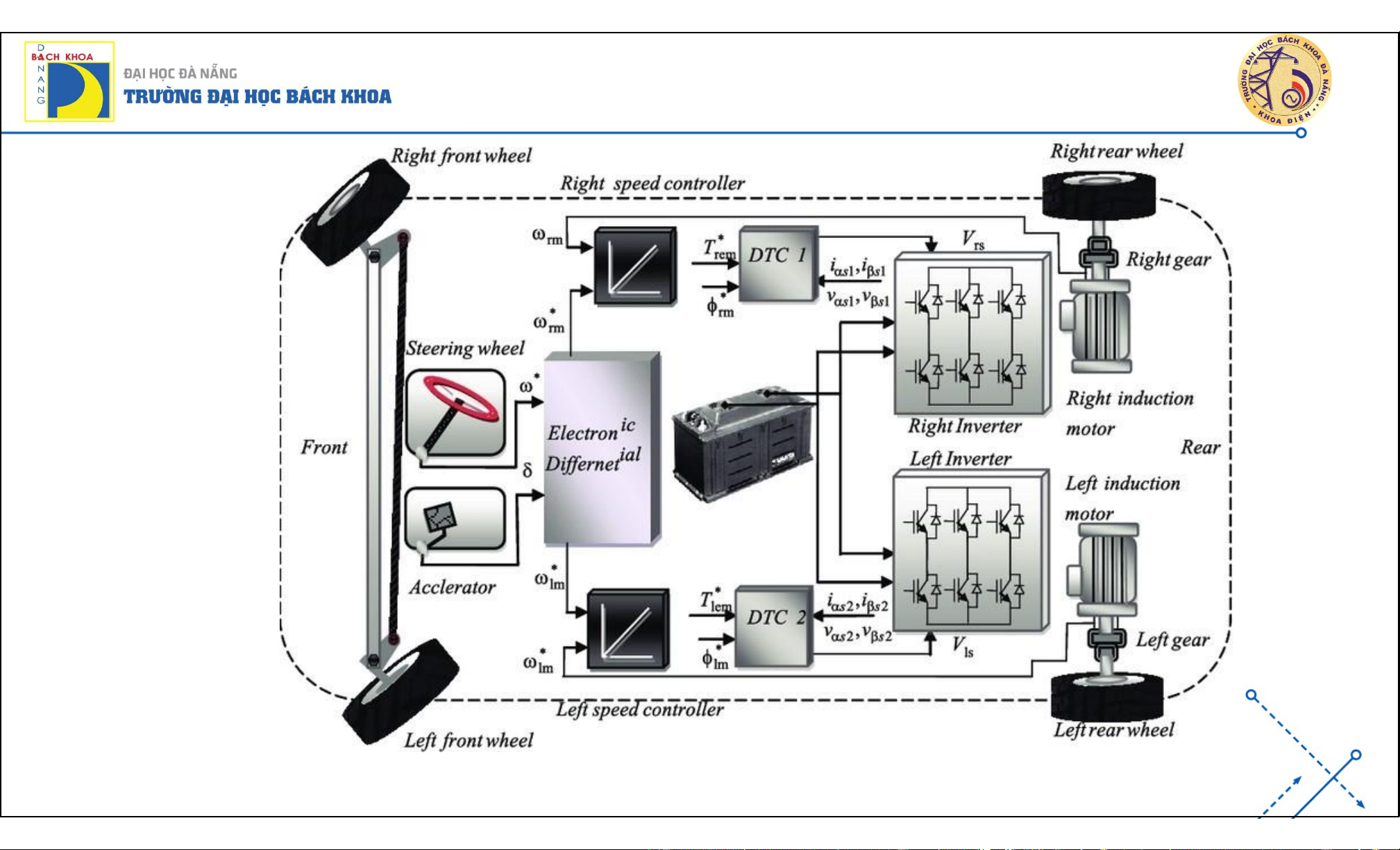
PGS. TS. Lê Tiến Dũng Ví dụ minh họa: hệ truyền động điện sử dụng động cơ xoay chiều 3 pha không đồng bộ để truyền động cho xe điện (tiếp theo)
Source: Gasbaoui, Brahim, et al. "The efficiency of direct torque control for electric vehicle behavior 16
improvement." Serbian Journal of Electrical Engineering 8.2 (2011): 127-146. KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
PHÂN LOẠI HỆ THỐNG TRUYỀN ĐỘNG ĐIỆN
Hệ truyền động điện trong thực tế rất đa dạng và nhiều loại thiết kế cho các mục đích, ứng dụng truyền
động khác nhau. Vì vậy khá khó khăn để phân loại các hệ truyền động điện theo các tiêu chí cụ thể. Việc
phân loại cũng tùy theo quan điểm. Trong bài này giới thiệu việc phân loại các hệ thống truyền động điện
theo các nhóm tiêu chí sau:
I. Phân loại theo khả năng điều chỉnh tốc độ (adjustability of the speed)
II. Phân loại theo loại động cơ sử dụng và loại điều khiển (motor type and drive controller)
III. Phân loại theo thông số kỹ thuật (technical data) 17 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
I. Phân loại theo khả năng điều chỉnh tốc độ (adjustability of the speed) 18 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
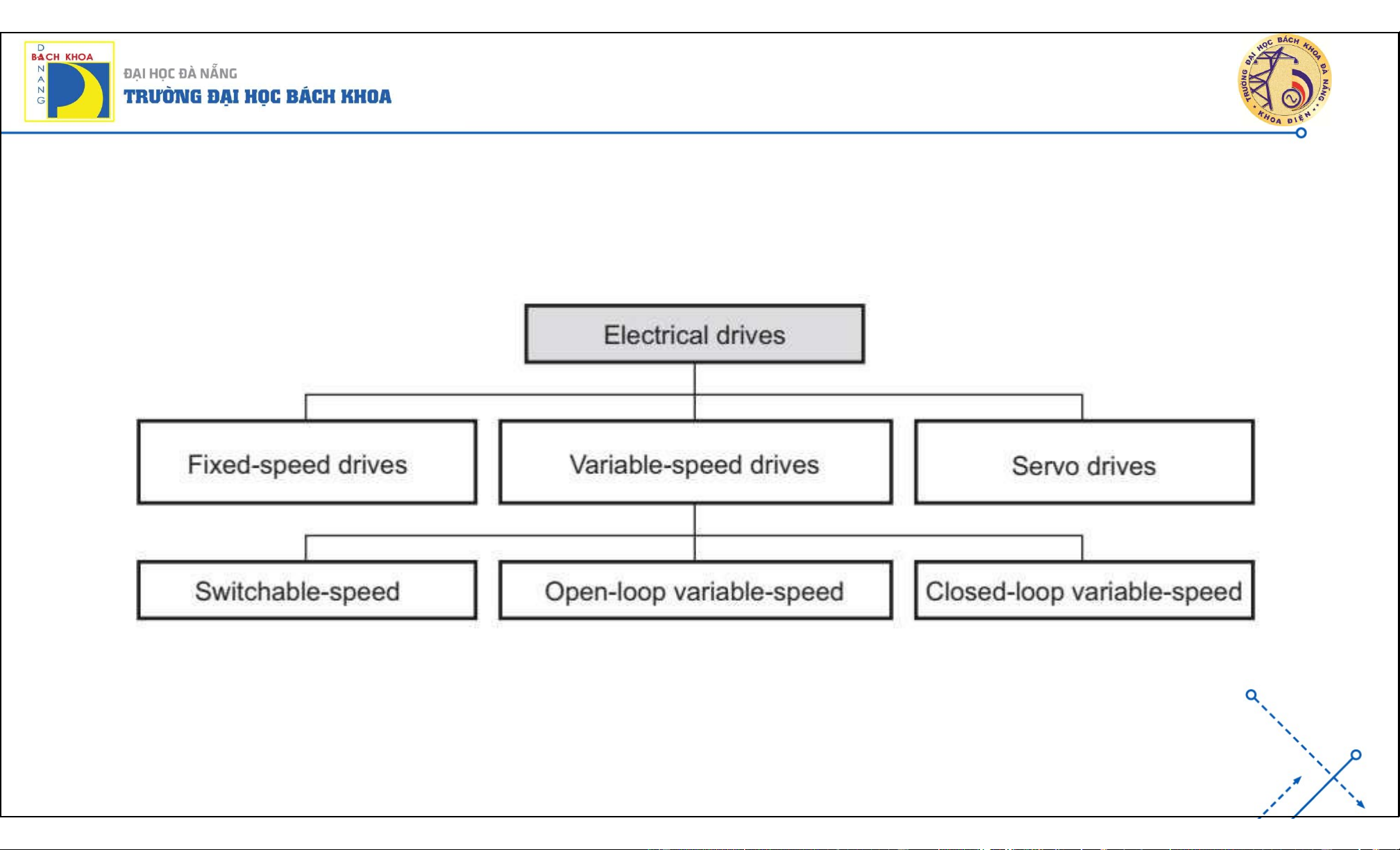
Phân loại theo khả năng điều chỉnh tốc độ, có 3 loại hệ truyền động điện:
1) Hệ truyền động điện không điều chỉnh tốc độ, hay hoạt động với một tốc độ cố định (fixed-speed drives)
Động cơ chỉ chạy với một tốc độc cố định, khi đó phần điều khiển cho hệ này chỉ điều khiển đóng hoặc cắt
nguồn cấp cho động cơ, cùng với các chức năng hạn chế dòng điện lúc khởi động, bảo vệ ngắn mạch, bảo vệ
quá tải,.. Ứng dụng của hệ truyền động này thường là các máy bơm, quạt thông gió, quạt thổi,… Loại động cơ
thường sử dụng cho hệ này là động cơ xoay chiều không đồng bộ.
2) Hệ truyền động điện có điều chỉnh tốc độ (Variable-speed drives)
Động cơ điều chỉnh được tốc độ để hoạt động với ít nhất 2 cấp tốc độ. Phần điều khiển của hệ truyền động
loại này có 3 loại tùy theo yêu cầu về dải điều chỉnh, độ chính xác, độ trơn điều chỉnh và số cấp điều chỉnh của
tải: Thay đổi tốc độ bằng chuyển mạch (Switchable-speed drives), Điều chỉnh tốc độ với cấu trúc vòng hở
(Open-loop variable-speed drives), Điều chỉnh tốc độ với cấu trúc vòng kín (Closed-loop variable-speed drives).
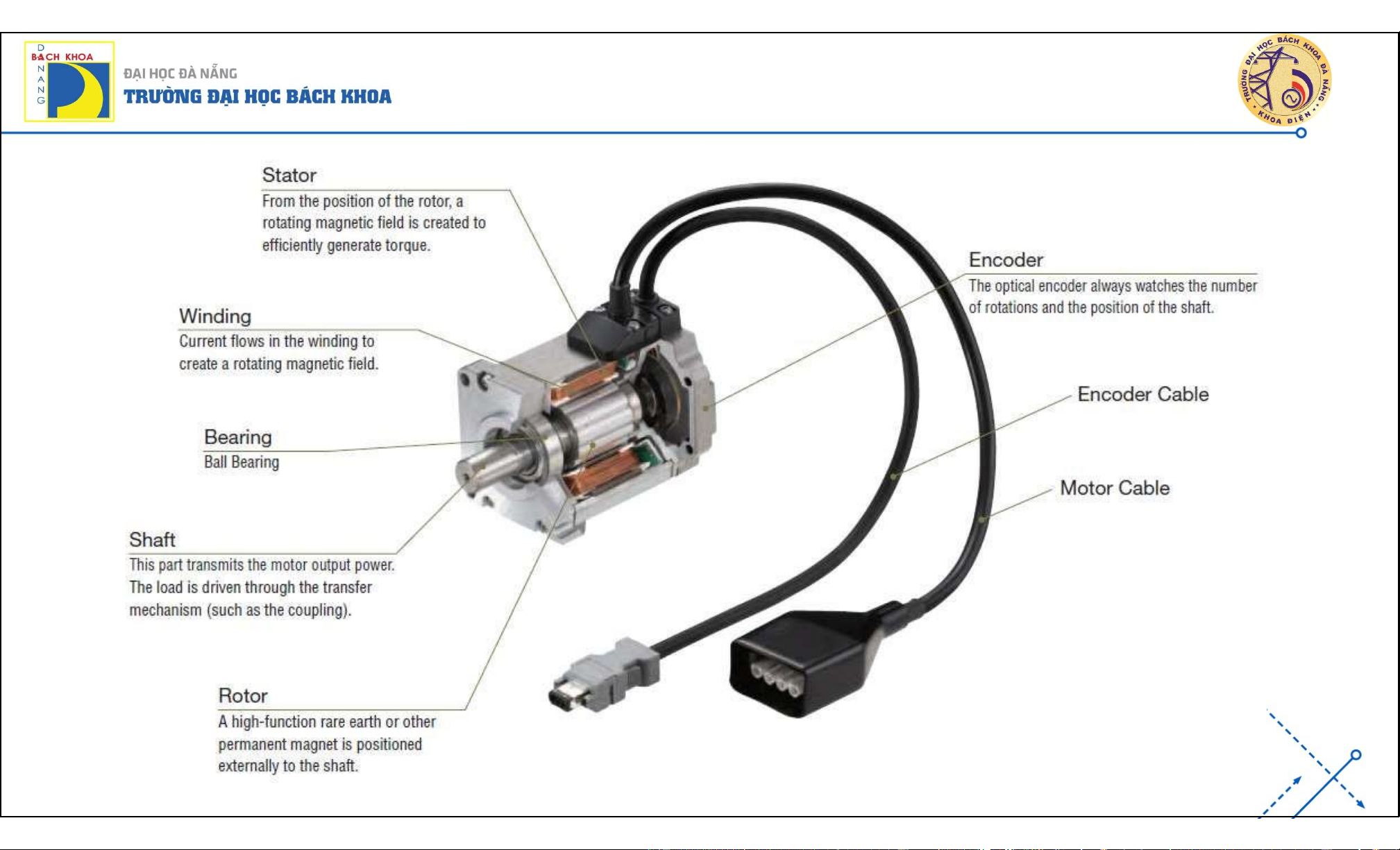
3) Hệ truyền động điện servo
Đây là loại hệ truyền động điện chất lượng cao. Được sử dụng cho các loại tải yêu cầu chuyển động với tốc
độ nhanh, quán tính bé, độ chính xác cao, độ trơn điều chỉnh tốt, đáp ứng các tác vụ phức tạp … Các ứng dụng
của hệ truyền động điện servo ví dụ như truyền động cho tay máy robot công nghiệp, máy CNC, máy cắt may tự động,… 19 KHOA ĐIỆN
PGS. TS. Lê Tiến Dũng
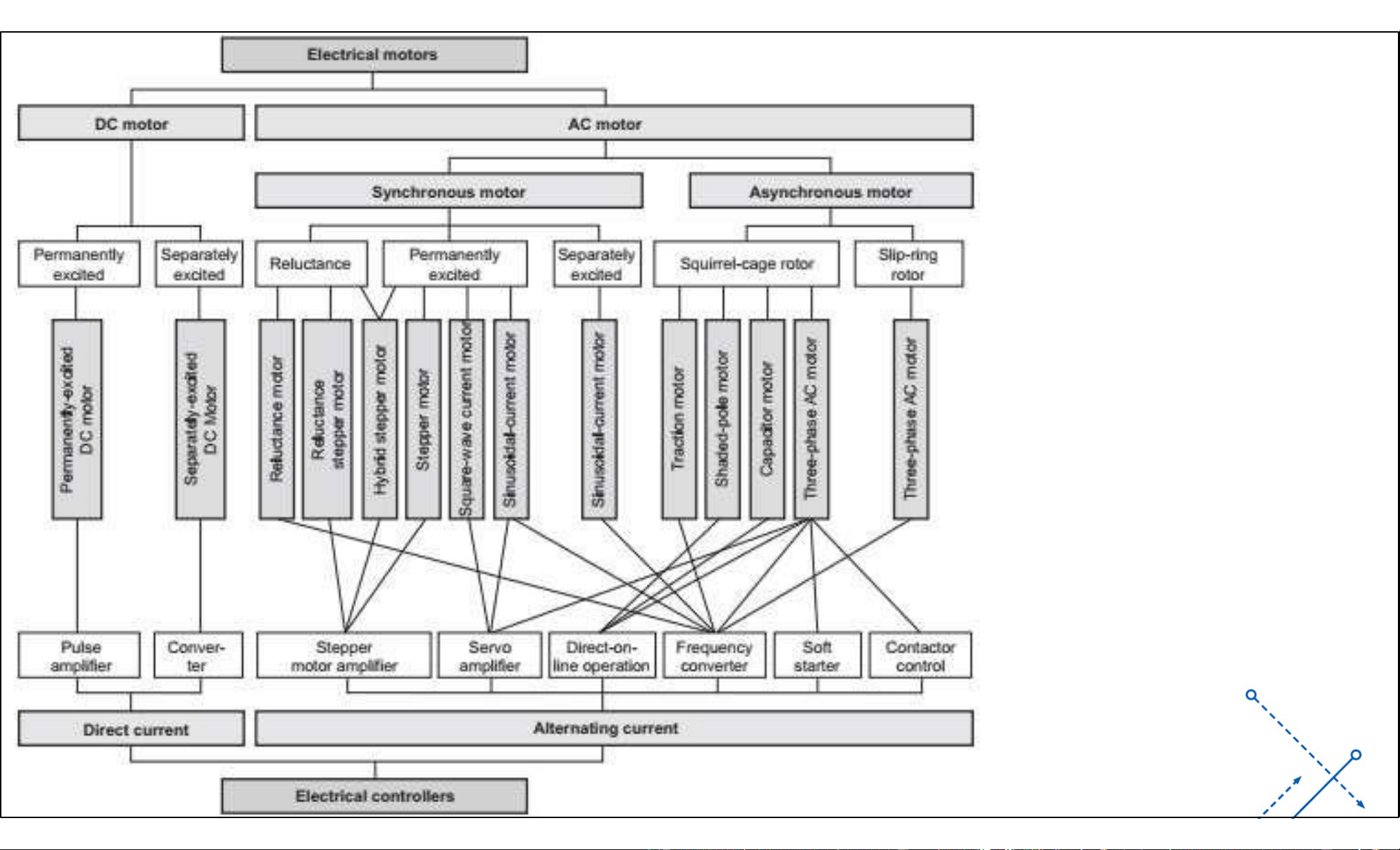
II. Phân loại theo loại động cơ
sử dụng và loại bộ điều khiển
(motor type and drive controller) 20
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32