Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Cải thiện công nghệ cảm biến: Nâng cấp cảm biến để tăng khả năng nhận diện và xửlý môi trường, bao gồm việc sử dụng công nghệ lidar, camera 3D và cảm biến siêuâm.
Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Tài liệu gồm 27 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:












Preview text:
ĐẠI HỌC DUY TÂN ------------ BÁO CÁO NHÓM ĐỒ ÁN CDIO
ĐỀ TÀI: ROBOT THEO ĐƯỜNG SỬ DỤNG VI ĐIỀU KHIỂN MSP430 - Sinh viên thực hiện : NGUYỄN VĂN TOÀN TRẦN MINH QUÂN
- Giảng viên hướng dẫn:
TH.S LÊ PHƯỢNG QUYÊN - Lớp : EE 347 C
Đà Nẵng, tháng 10 năm 2024 LỜI MỞ ĐẦU LỜI MỞ ĐẦU
Ngày nay, con người càng ngày càng phát triển khoa học kỹ thuật, cuộc sống
con người ngày càng ngày thay đổi ngày càng tốt hơn, những thiết bị hiện đại đã phục
vụ con người trong cuộc công nghiệp hóa, hiện đại hóa. Đặc biệt góp phần không nhỏ
là nghành kĩ thuật điện-điện tử trong sự nghiệp xây dựng đất nước. Những thiết bị điện
tử, điện từ được ứng dụng trong cuộc sống hằng ngày. Từ những thời gian đầu mới ra
mắt vi điều khiển, vi sử lý đã cho chúng ta thấy sự ưu việc của nó cho đến ngày nay.
Thành tựu mà vi điều khiển mang lại những thứ không thể thành có thể để góp phần
nâng cao đời sống của con người.
Để góp phần làm sáng tỏ hiệu quả của những ứng dụng trong thực tế của môn
vi xử lý, sau một thời gian học tập được các thầy cô trong khoa giảng dạy về các kiến
thức chuyên ngành, đồng thời được sự giúp đỡ nhiệt tình của các thầy cô trong Khoa
Điện - Điện tử, cùng với sự lỗ lực của chúng em đã “Thiết kế robot dò line” nhưng do
thời gian, kiến thức và kinh nghiệm của chúng em còn có hạn nên sẽ không thể tránh
khỏi những sai sót. Chúng em rất mong được sự giúp đỡ và tham khảo ý kiến của thầy
cô và các bạn nhằm đóng góp phát triển thêm đề tài. LỜI CẢM ƠN
Để hoàn thành bài báo cáo này, chúng em xin gửi lời cảm ơn đến Ban giám
hiệu nhà Trường Đại học Duy Tân đã tạo điều kiện về cơ sở vật chất với phòng học,
trang thiết bị và wifi, để phục vụ cho việc học và kiếm thông tin của chúng em.
Với lòng biết ơn sâu sắc nhất, chúng em xin gửi đến cô Lê Phượng Quyên và
Trường Đại học Duy Tân đã cùng với tri thức và tâm huyết của mình để truyền đạt cho
chúng em những kiến thức quý báu để chúng em có thể học tập, nghiên cứu chế tạo ra được sản phẩm.
Trong một học kì, nhóm em sẽ không thể hoàn thành dự án nếu không có sự
giảng dạy tận tâm, giúp đỡ nhiệt tình của cô Lê Phượng Quyên. Với lòng biết ơn sâu
sắc nhất, nhóm em xin gửi đến cô. Chúc cô sẽ luôn thành công và tâm huyết hơn với
nghề để tiếp tục truyền đạt những kiến thức quý báu cho chúng em trong quá trình học
tập ở trường và xa hơn là ngoài cuộc sống.
Do chưa có nhiều kinh nghiệm nên không thể tránh khỏi những thiếu sót và hạn
chế, rất mong nhận được ý kiến đóng góp từ phía cô để dự án được hoàn thiện hơn nữa.
Em xin chân thành cảm ơn! MỤC LỤC
CHƯƠNG I: TỔNG QUAN VỀ ĐỀ TÀI ..................................................................... 1
1.1 Giới thiệu đề tài: ................................................................................................... 1
1.2 Mục đích đề tài: ................................................................................................... 1
1.3 Sơ lược các bước thực hiện ................................................................................. 1
1.4 Cấu trúc robot xe dò line .................................................................................... 2
1.5 Phạm vi nghiên cứu ............................................................................................. 2
1.6 Phương pháp nghiêm cứu ................................................................................... 3
1.7 Mục tiêu thiết kế .................................................................................................. 3
1.8 Ứng dụng: ............................................................................................................. 3
2.1 Linh kiện và phần mềm sử dụng: ...................................................................... 4
2.2 Giới thiệu linh kiện .............................................................................................. 4
2.2.1 MSP430g2553 .................................................................................................... 4
2.2.2 : Thông số kỹ thuật ............................................................................................ 5
2.2.3 Module điều khiển L298N ................................................................................ 6
2.2.4 Module thu phát hồng ngoại ............................................................................ 7
CHƯƠNG III: NỘI Dung THIẾT KẾ PHẦN MỀM VÀ MÔ HÌNH ....................... 8
3.1 Thiết kế cơ khi...................................................................................................... 8
3.2 sơ đồ toàn mạch kết nối vs linh kiện .................................................................. 9
3.3 Khối cảm biến ...................................................................................................... 9
3.4 Đường line .......................................................................................................... 10
3.5 Code điều khiển ................................................................................................. 10
CHƯƠNG IV: KẾT LUẬN ......................................................................................... 13
4.1 Kết quả đạt được ............................................................................................... 13
4.2 Ứng dụng, hrn chế và hướng giải quyết .......................................................... 13 DANH MỤC BẢNG
Bảng 1 Cấu trúc MSP430g2553 .................................................................................... 6 DANH MỤC CÁC HÌNH
Hình 1 Thiết kế hệ thống ............................................................................................... 4
Hình 2 Sơ đồ mạch điện................................................................................................. 5
Hình 3 MSP430G2553 ................................................................................................... 5
Hình 4 Sơ đồ cấu trúc MSP430G2553 .......................................................................... 6
Hình 5 Module điều khiển động cơ L298N .................................................................. 7
Hình 6 Module thu phát hồng ngoại LM358 ............................................................... 9
Hình 7 Sơ đồ nguyên lý cảm biến hồng ngoại ........................................................... 10
Hình 8 Động cơ DC ...................................................................................................... 11
Hình 9 Bản vẽ thiết kế xe dò line ................................................................................ 12
Hình 10 Sơ đồ đấu dây ................................................................................................ 13
Hình 11 Lưu đồ thuật toán .......................................................................................... 14
Hình 12 Mô hình thực tế ............................................................................................. 17
CHƯƠNG I: TỔNG QUAN VỀ ĐỀ TÀI
1.1 Giới thiệu đề tài:
Ngày nay, robotic đã đạt được những thành tựu to lớn trong sản xuất công
nghiệp cũng như trong đời sống. Sản xuất robot là nghành công nghiệp trị giá hàng tỉ
USD và ngày càng phát triển mạnh, trong các họ robot chúng ta không thể không nhắc
tới mobile robot với những đặc thù riêng mà các loại robot khác không có.
Mobile robot có thể di chuyển một cách rất linh hoạt, do đó tạo nên không gian
hoạt động lớn và cho đến nay nó đã dần khẳng định vai trò quan trọng không thể thiếu
trong nhiều lĩnh vực, thu hút được rất nhiều sự đầu tư và nghiên cứu.
Mobile robot cũng được chia ra làm nhiều loại: robot học đường đi, robot dò
đường line, robot tránh vật cản, robot tìm đường cho mê cung, ... trong số đó robot dò
đường line, tránh vật cản dễ dàng dung nhiều trong cuộc sống. Việc phát triển loại
robot này sẽ phục vụ rất đắc lực cho con người.
1.2 Mục đích đề tài:
Robot dò line vừa có nhiều ứng dụng trong thực tế vừa dễ dàng để sinh viên
vận dụng những kiến thức tiếp thu được trên giảng đường vào nó, với những kết cấu
cơ khí đơn giản nhưng lại có thể kết hợp được với khá nhiều thành phần điện tử
(encoder, sensor xác định đường line, sensor đo khoảng cách...) nên những robot này
rất phù hợp để tụi em dễ dàng học tập và nghiên cứu thêm.
1.3 Sơ lược các bước thực hiện:
Trước tiên ta phải chế tạo được khung xe Robot. Khung xe phải đảm bảo bền
chắc, tối ưu và đạt độ chính xác nhất định về việc bố trí các bánh xe và động cơ.
Và cuối cùng là công đoạn lập trình dựa trên những kiến thức đã học được.
1.4 Cấu trúc robot xe dò line: Vật liệu, linh kiện: - Modul điều khiển L298
- 2x Cảm biến hồng ngoại - 1x Khung xe - 1x Đế lắp pin - 2x pin loại 18650 3,7V 7
- 2x Motor Giảm tốc (2 bánh xe)
- 10x Dây điện hai đầu đực đầu cực và dây điện hai đầu cái
1.5 Phạm vi nghiên cứu:
Thiết kế và lắp ráp các thành phần cơ khí và điện tử như động cơ, bánh xe, cảm
biến, và các linh kiện điện tử điều khiển để tạo thành một hệ thống robot hoàn chỉnh.
Lập trình điều khiển robot sử dụng để có thể phát hiện đường line, di chuyển trên
đường. Thiết kế và thi công một bộ pin và sạc để cung cấp năng lượng cho hệ thống robot.
Kiểm tra, đánh giá và tối ưu hoá hiệu suất của hệ thống robot. Tập trung vào
việc thiết kế mô hình xe robot dò line bo mạch MSP430g2553, không bao gồm các
nghiên cứu về trí tuệ nhân tạo hay các vấn đề liên quan đến xử lý hình ảnh phức tạp.
Ứng dụng của “Mô hình robot dò line gấp vật”: Công nghiệp: Robot có khả năng tự
động dò đường line sử dụng trong quá trình dò đường trong các dự án lớn.
Với các ứng dụng khác nhau, đề tài này có thể mang lại nhiều lợi ích cho con
người và giúp tăng cường sự phát triển của ngành công nghiệp robot.
1.6 Phương pháp nghiêm cứu:
Tìm hiểu và nghiên cứu các kiến thức về lý thuyết robot, lý thuyết điều khiển, cơ
khí và điện tử. Thiết kế kiến trúc tổng thể của robot, bao gồm cơ khí và điện tử. Lựa
chọn các linh kiện và phần mềm cần thiết để xây dựng robot, bao gồm vi điều khiển
MSP430g2553, các cảm biến, động cơ và bộ nguồn. Lập trình cho robot để điều khiển chuyển động, dò line.
Thực hiện các thí nghiệm và thử nghiệm để đánh giá hiệu suất của robot, bao
gồm độ chính xác trong quá trình dò line.
Đánh giá kết quả thí nghiệm và thử nghiệm, tìm hiểu những hạn chế và điều
chỉnh robot để cải thiện hiệu suất. Phương pháp nghiên cứu này sử dụng kết hợp giữa
lý thuyết và thực tiễn để đạt được mục tiêu của đề tài. Các thí nghiệm và thử nghiệm
được thực hiện để đánh giá hiệu suất của robot và cải thiện các yếu điểm trong quá
trình thiết kế và xây dựng. 8
1.7 Mục tiêu thiết kế:
Robot tự hành di chuyển theo line, thực hiện nhiệm vụ tự động bám và dò theo
đường line mà không có sự điều khiển từ xa. Đảm bảo được sự ổn định của xe, ít bị
nhiễu do yếu tố phần cứng ảnh hưởng.
Xe vận hành có, 2 bánh sau chủ động và một trục cố định
Xe dẫn động bằng 2 động cơ
Phần điều khiển chuyển động chọn 2 mạch cầu H được tích hợp sẵn trong L298N.
Phần dò đường dùng 2 cặp cảm biến 1.8 Ứng dụng:
Đề tài được ứng dụng khá rộng rãi trong công nghệ chế tạo Robot, đặc biệt là
Robotdò đường xuất hiện hầu hết trong các cuộc thi robocon. 9
CHƯƠNG II: CƠ SỞ LÝ THUYẾT
2.1 Linh kiện và phần mềm sử dụng:
Linh kiện: MSP430, module điều khiển L298N, module thu phát hồng ngoại,
pin 7.4V, khung xe 2 bánh và 1 trục, dây điện 2 đầu đực cái. Phần mềm: IAR, Protues.
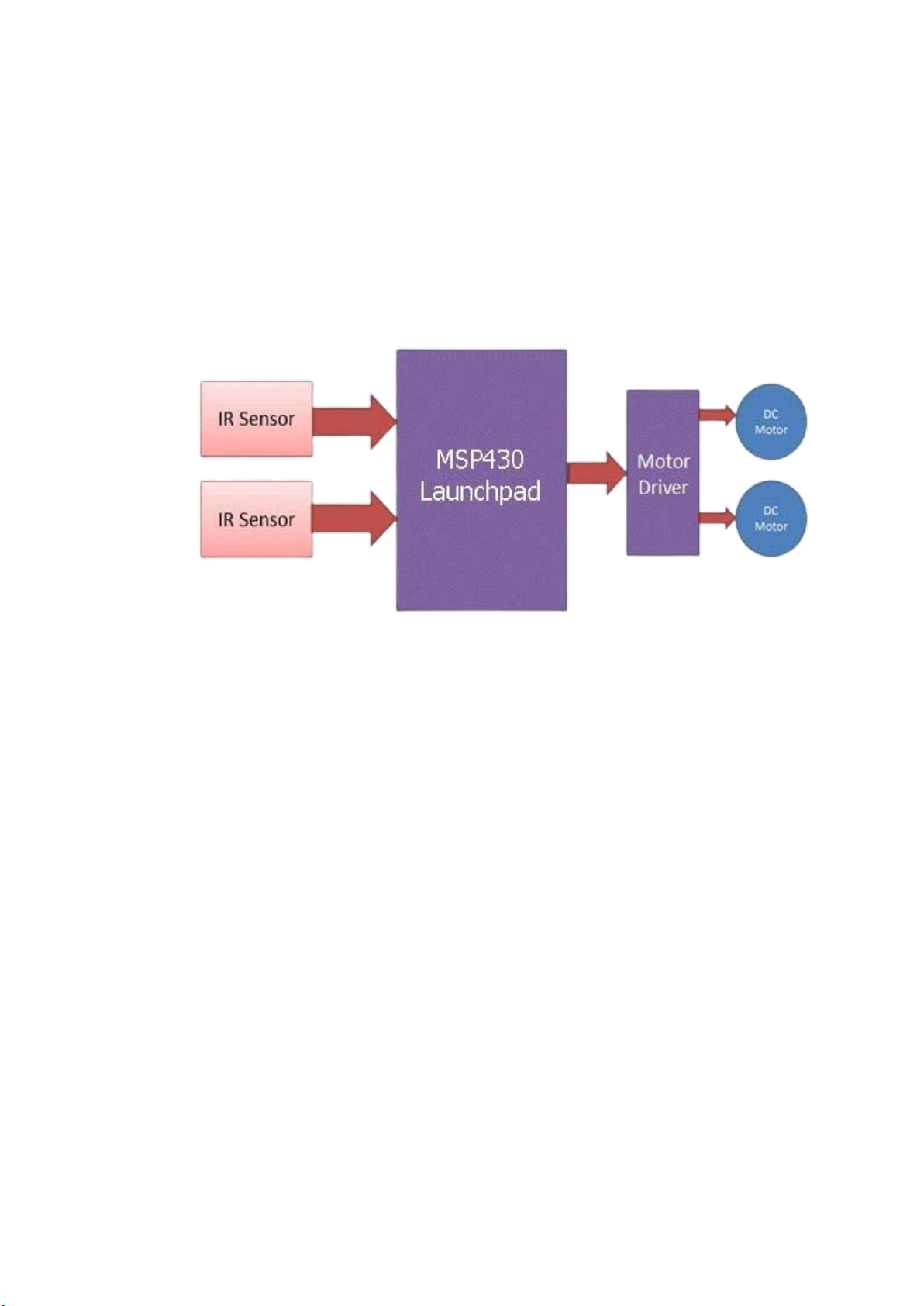
2.1.1 Thiết kế hệ thống:
Hình 1 Thiết kế hệ thống
a. Phần cảm biến: Phần này chứa điốt hồng ngoại, chiết áp, Bộ so sánh (Op-
Amp) và đèn LED. chiết áp được sử dụng để cài đặt điện áp tham chiếu ở một cực của
bộ so sánh và cảm biến hồng ngoại cảm nhận đường dây và cung cấp sự thay đổi điện
áp ở cực thứ hai của bộ so sánh. Sau đó, bộ so sánh so sánh cả điện áp và tạo ra tín
hiệu kỹ thuật số ở đầu ra. Ở đây trong mạch này, chúng tôi đã sử dụng hai bộ so sánh
cho hai cảm biến. LM358 được sử dụng làm bộ so sánh. LM358 có sẵn hai Op-amp tiếng ồn thấp.
b. Phần điều khiển: MSP430 Launchpad được sử dụng để điều khiển toàn bộ
quá trình của robot theo dõi dòng. Đầu ra của bộ so sánh được kết nối với P1_3 chân
kỹ thuật số và P1_4 của MPS430 Launchpad. MSP430 Launchpad đọc các tín hiệu
này và gửi lệnh đến mạch trình điều khiển để lái xe theo dõi.
c. Phần trình điều khiển: Phần trình điều khiển bao gồm trình điều khiển động
cơ và hai động cơ DC. Trình điều khiển động cơ được sử dụng để lái động cơ vì 10
MSP430 Launchpad không cung cấp đủ điện áp và dòng điện cho động cơ. Vì vậy,
chúng tôi đã thêm một mạch trình điều khiển động cơ để có đủ điện áp và dòng điện
cho động cơ. Ở đây chúng tôi đã sử dụng trình điều khiển L298d để lái xe DC Motors.
MSP430 Launchpad gửi lệnh đến trình điều khiển động cơ này và sau đó nó điều khiển động cơ.
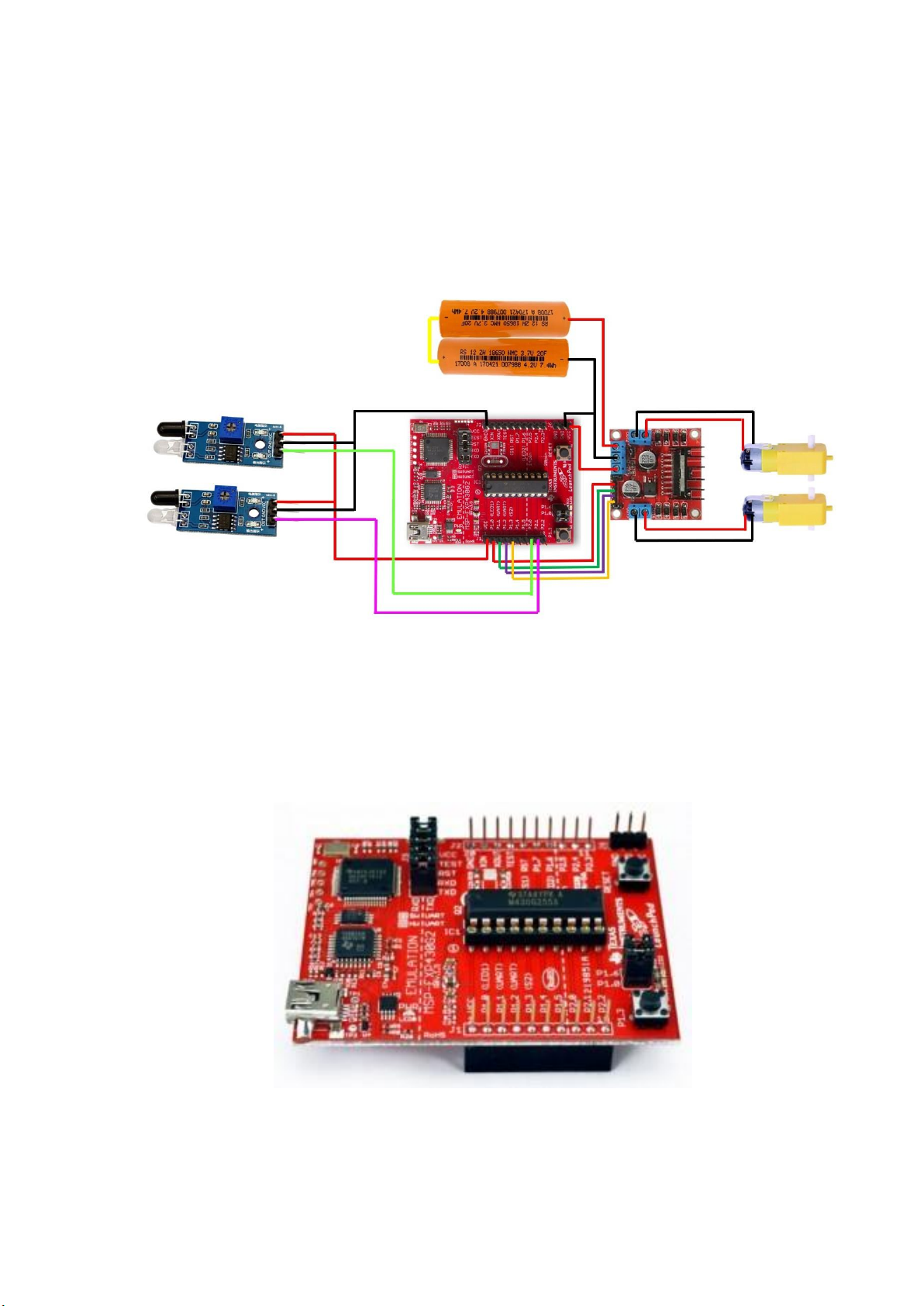
Hình 2 Sơ đồ mạch điện
2.2 Giới thiệu linh kiện: 2.2.1 MSP430g2553: Hình 3 MSP430G2553 11
Tính năng sản phẩm: MSP430g2553 được sử dụng phổ biến trong việc tự thiết
kế ra các mạch điện tử như điều khiển led, gửi dữ liệu lên lcd, điều khiển motor, …
hay được gắn thêm các Shield để kết nối nhiều module cảm biến khác để thực hiện
thêm nhiều chứcc năng mở rộng.
Ngoài ra vi điều khiển này rất linh hoạt và được sử dụng rộng rãi trong các dự
án điện tử, đặc biệt là trong các ứng dụng IOT và thiết bị di động.
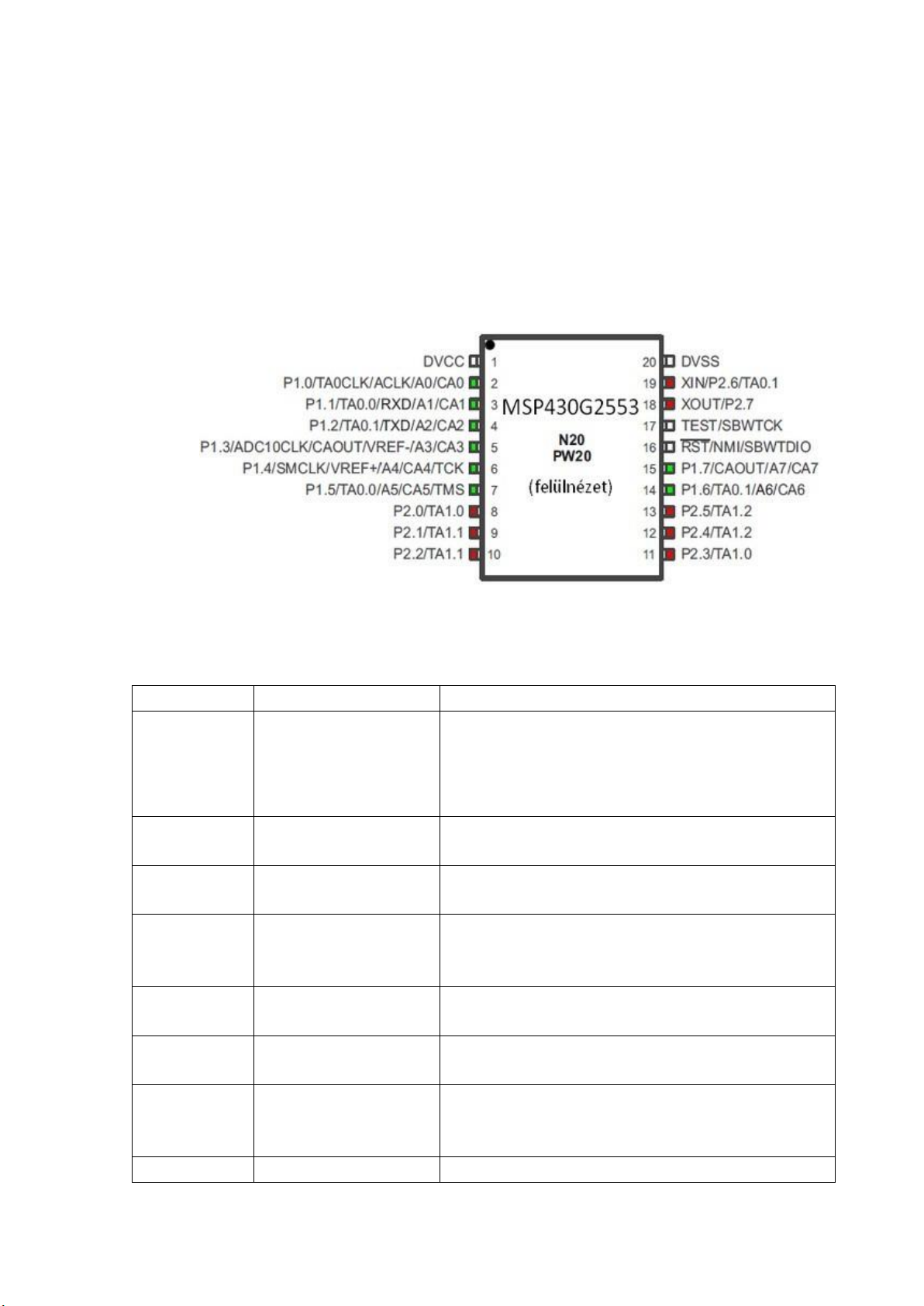
Hình 4 Sơ đồ cấu trúc MSP430G2553
Bảng 1 Cấu trúc MSP430g2553 Tên chân Chân Chức năng
Chân GPIO P1.0 đến P1.7 và P2.0 Đây là các chân I/O của bộ vi điều khiển được đến P2.5
đưa ra bảng mạch để giao tiếp.
Sử dụng kích tín hiệu chức năng trong quá trình Nút nhấn P1.3 hoạt động. Sử Đèn
dụng báo trạng thái trong quá trình hoạt LED P1.0 & P1.6 động.
Đã kết nối với chân RESET RESET của vi điều
Nếu được nhấn, vi điều khiển sẽ reset. khiển Nguồn Ba giắc cắm ở bên kết dưới
nối nguồn điện sau khi lập trình.
Bộ dao động Mối hàn liền kề với vi Để cấp thạch anh
nguồn xung nhịp chính xác. điều khiển Đầu
Cung cấp cầu nối giữa bảng mạch mô phỏng và nối 6 chân đầu nối
bảng mạch Vi điều khiển. Có thể ngắt kết nối để eZ430 cách lý cả hai phần.
Cổng lập trình Đầu nối USB ở trên
Được kết nối với PC (Để lập trình và cấp 12 nguồn) bằng cổng này.
2.2.2 : Thông số kỹ thuật:
- Nguồn cấp 5VDC thông qua cổng USB kết nối với máy tính
- Nạp code được cho MSP430 14 chân, 20 chân ngay tại trên KIT
- Nạp code được cho tất cả các dòng MSP430 thông qua chân Reset và Test.
- 2LED I/O: được jumper với P1.0 và P1.6 của MCU
- Nút nhấn I/O: P1.3 của MCU
- Nút nhấn Reset: được nối với chân Reset của MCU
- Hỗ trợ theo dõi Debug MCU thông qua cổng USB
- Hỗ trợ giao tiếp UART với máy tính - Đạt chuẩn RoHS
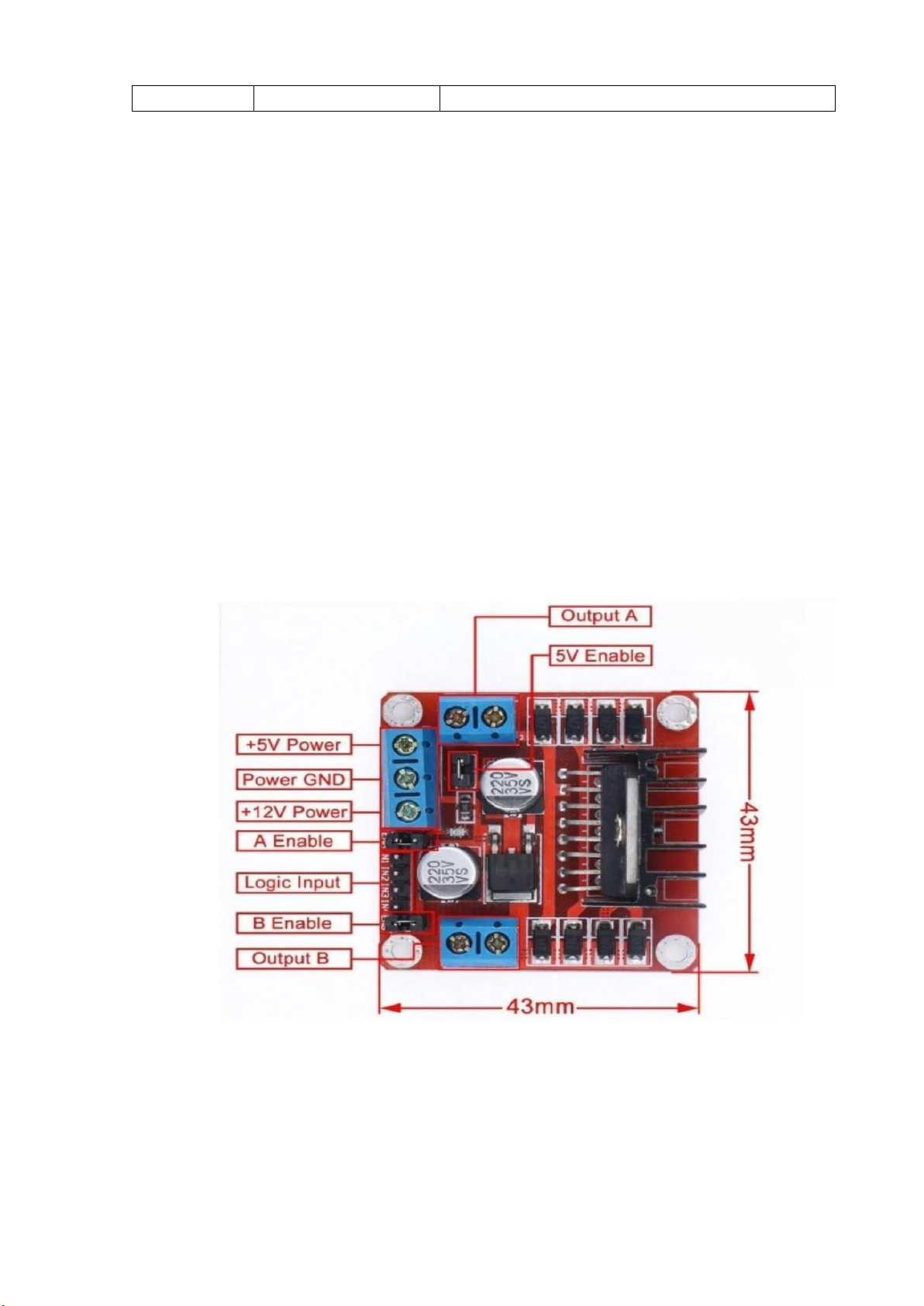
2.3 Module điều khiển L298N:
Hình 5 Module điều khiển động cơ L298N Tính năng sản phẩm:
- IC L298 là một IC tích hợp nguyên khối gồm 2 mạch cầu H bên trong. Với
điện áp làm tăng công suất nhỏ như động cơ DC loại vừa… 13
Chức năng các chân của L298N:
- 4 chân INPUT: IN1, IN2, IN3, IN4 được nối lần lượt với các chân 5,7, 10, 12
của L298. Đây là các chân nhận tín hiệu điều khiển.
- 4 chân OUTUT: OUT1, OUT2, OUT3, OUT4 (tương ứng với các chân
INPUT) được nối với các chân 2, 3,13,14 của L298. Các chân này sẽ được nối với động cơ.
- Hai chân ENA và ENB dùng để điều khiển mạch cầu H trong L298.Nếu ở
mức logic “1” (nối với nguồn 5V) cho phép mạch cầu H hoạt động, nếu ở mức logic
“0” thì mạch cầu H không hoạt động
-Với bài toán của mình ở trên, các bạn chỉ cần lưu ý đến cách điềukhiển chiều quay với L298N:
- Khi ENA = 0: Động cơ không quay với mọi đầu vào. - Khi ENA = 1:
- INT1 = 1; INT2 = 0: Động cơ quay thuận.
- INT1 = 0; INT2 = 1: Động cơ quay nghịch.
- INT1 = INT2: Động cơ dùng ngay tức thì.
Với ENB cũng tương tự với INT3, INT4.
Trong bài này mình sử dụng module L298N để điều khiển chiều quay của động cơ DC. Thông số kỹ thuật:
Driver: L298N tích hợp hai mạch cầu H
Điện áp điều khiển: +5V ~ +12 V
Dòng tối đa cho mỗi cầu H là :2A
Điện áp của tín hiệu điều khiển: +5 V ~ +7 V
Dòng của tín hiệu điều khiển: 0 ~ 36Ma
Công suất hao phí: 20W (khi nhiệt độ T = 75 °C)
Nhiệt độ bảo quản: -25°C ~ 30°C 14
2.4 Module thu phát hồng ngoại:
Hình 6 Module thu phát hồng ngoại LM358 Tính năng sản phẩm:
Cảm biến phát hiện vật cản, vật thể hồng ngoại đi kèm với chiết áp trên bo
mạch để điều chỉnh độ nhạy. Vì module có đầu ra là tín hiệu kỹ thuật số nên dễ dàng
kết nối với nhiều loại vi điều khiển khác nhau, ví dụ như MSP430g2553/Genuino
UNO, Mega, Leornado và Raspberry Pi.
Cảm biến đi kèm một bộ phát và bộ thu hồng ngoại phía trước module. Bất cứ
khi nào có vật thể chặn luồng hồng ngoại, nó sẽ phản xạ lại tia hồng ngoại và bộ thu sẽ
nhận được tín hiệu qua mạch so sánh trên bo mạch. Cảm biến cũng có thể sử dụng
chiết áp trên bo mạch để tăng độ nhạy và tăng phạm vi phát hiện. Nó tương thích với đầu vào 5V hoặc 3.3V. Thông số kỹ thuật:
Nguồn vào: 3.3V hoặc 5VDC.
Kết nối ba chân: OUT, GND và VCC:
Phạm vi phát hiện chướng ngại vật: 2cm đến 10cm
Độ nhạy có thể điều chỉnh với chiết áp trên bo mạch.
Góc phát hiện: 35 độ thích hợp với tất cả vi điều khiển.
Kích thước: 3.1 cm x 1.5 cm 15
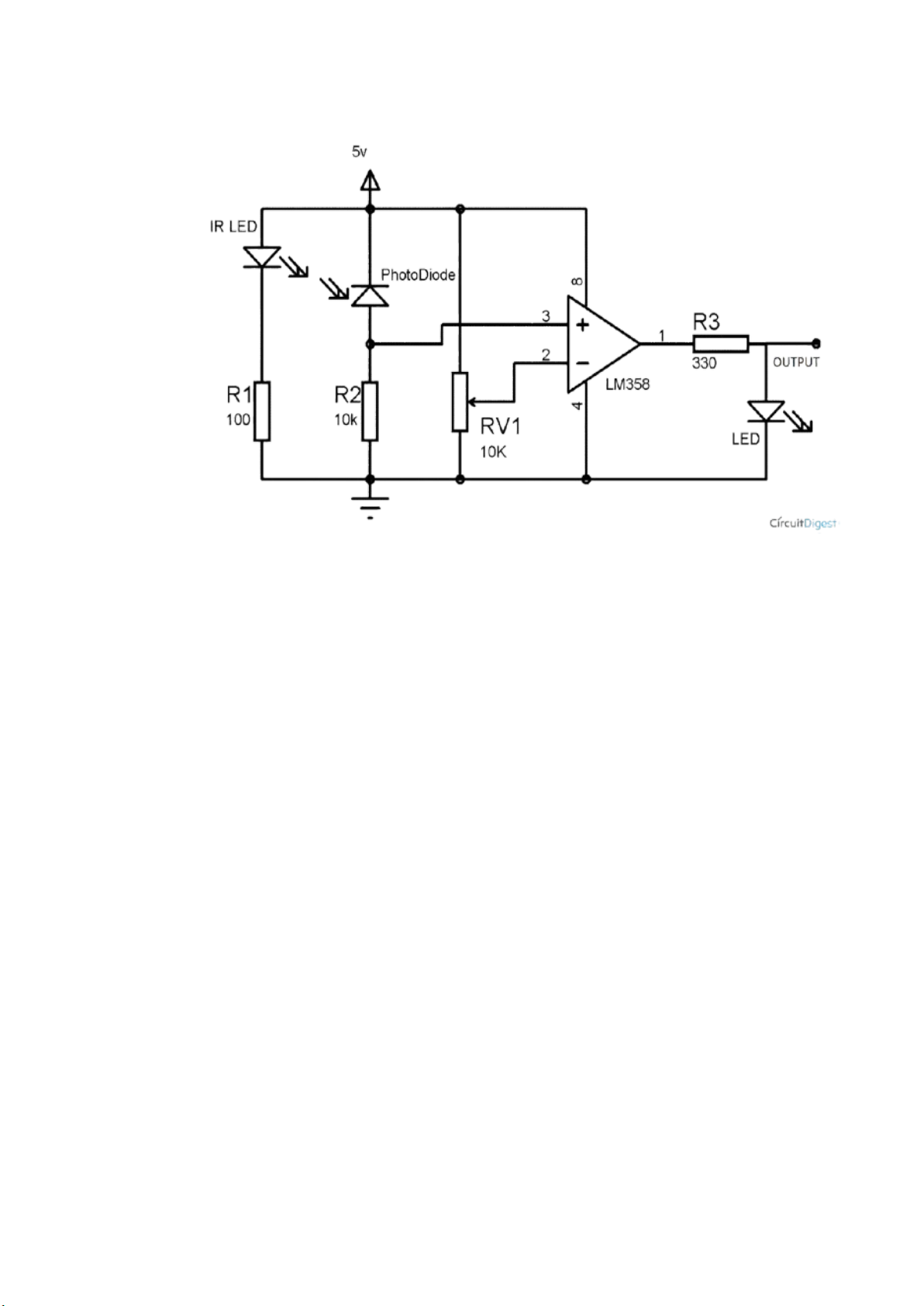
2.5 Nguyên lý hoạt động IR Infrared Obstacle Avoidance:
Hình 7 Sơ đồ nguyên lý cảm biến hồng ngoại
Led phát hồng ngoại (IR LED) luôn luôn phát ra sóng ánh sáng
có bước sóng hồng ngoại mắt người không thể nhìn thấy ánh sáng
này, vì vậy người ta sử dụng led thu hồng ngoại, led thu hồng ngoại
bình thường nó có nội trở rất lớn (vài trăm KΩ), khi led thu được tia
hồng ngoại chiếu vào đủ lớn thì nội trở của nó giảm xuống (cỡ vài chục Ω).
Khi gặp vật cản, những chùm tia hồng ngoại gặp vật cản và
phản xạ lại led thu làm led thu thay đổi giá trị điện trở. Ở đây chúng
ta thấy cầu chia áp ở điện trở R2 và mắt thu hồng ngoại, sự thay đổi
điện trở của mắt thu hồng ngoại dẫn đến điện áp đầu vào chân 3 OpAmp cũng thay đổi.
Khi đó, điện áp đầu vào chân 3 Op-Amp được so sánh với giá trị
điện áp không đổi gim trên biến trở R3, nếu điện áp chân 3 Op-Amp
lớn hơn điện áp chân 2 Op-Amp thì Op-Amp xuất mức 1 (bằng VCC).
Ngược lại nếu điện áp chân 3 Op-Amp nhỏ hơn điện áp chân 2 Op-
Amp thì Op-Amp xuất mức 0 (bằng GND). 16
Khi khoảng cách càng gần, sự thay đổi càng lớn.
Điện trở như R1 (150 Ω), R2 (10K Ω), R4 (1 KΩ) giúp các led
hoạt động mà không bị cháy. Biến trở R3 dùng để chỉnh độ nhạy của biến trở. 2.6 Động cơ DC:
Động cơ DC là một bộ phận quan trọng trong mô hình, động cơ có chức năng
mở và đóng cửa tùy theo yêu cầu của trung tâm điều khiển Hình 8 Động cơ DC Thông số kỹ thuật:
Điện áp: 3-12VDC, khuyến nghị ở giải điện áp (6-8VDC)
Dòng: 70mA (250mA Max) ở 3V Mô men xoắn: 800gfcm Tỷ số truyền: 1:48
Tốc độ: 125 rpm 3VDC (bánh 66mm: 26rpm)
208 rpm 5VDC (bánh 66mm: 44rpm)
Kích thước: 64 * 19 * 22.6mm Trọng lượng: 27g 17
CHƯƠNG III: NỘI DUNG THIẾT KẾ PHẦN MỀM VÀ MÔ HÌNH
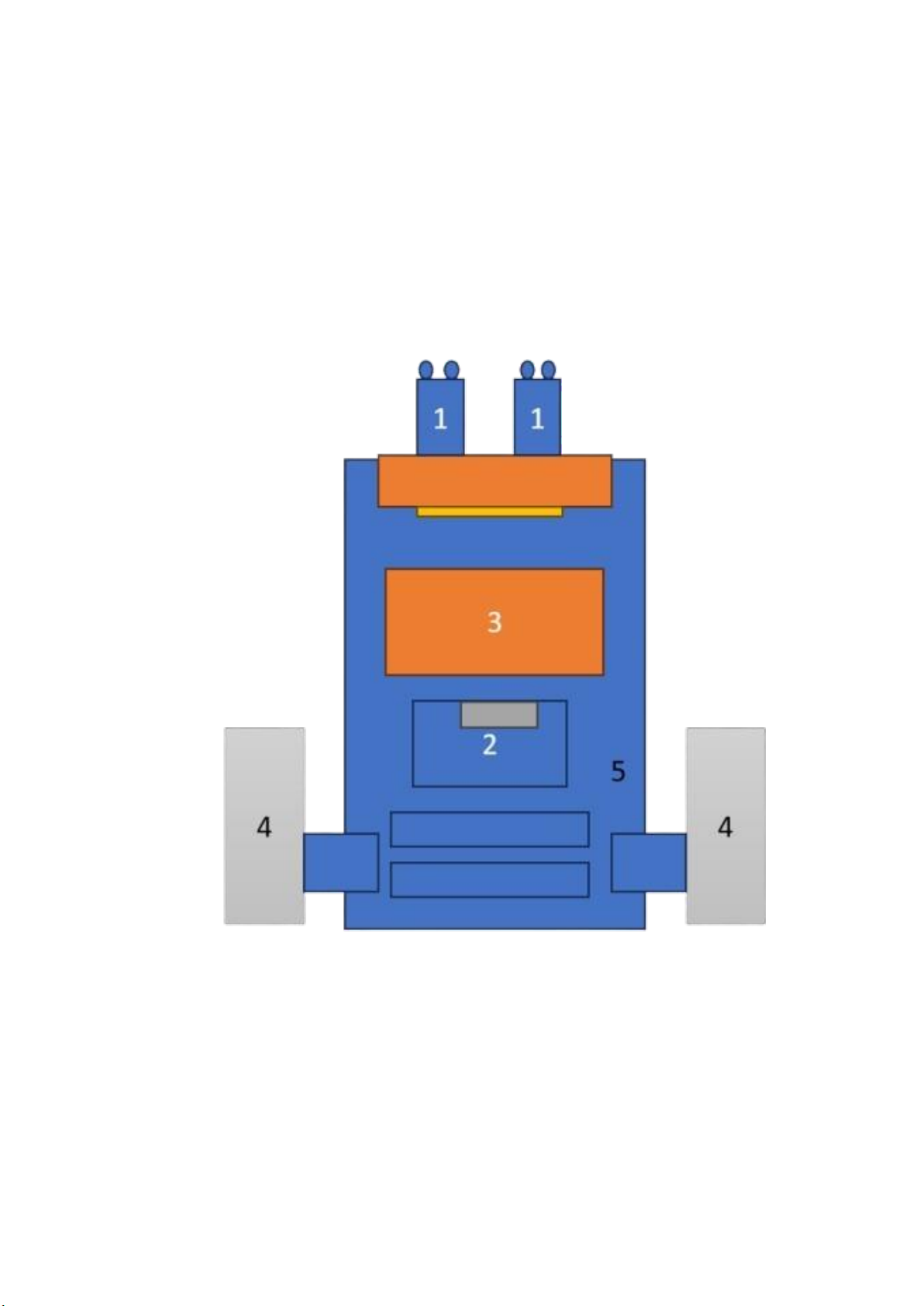
3.1 Thiết kế cơ khí:
Hình 9 Bản vẽ thiết kế xe dò line Giải thích:
1 - Module thu phát hồng ngoại 2 - Module L298N 3 - MSP430g2553 4 - Động cơ 18 5 - Khung xe 6 - Pin
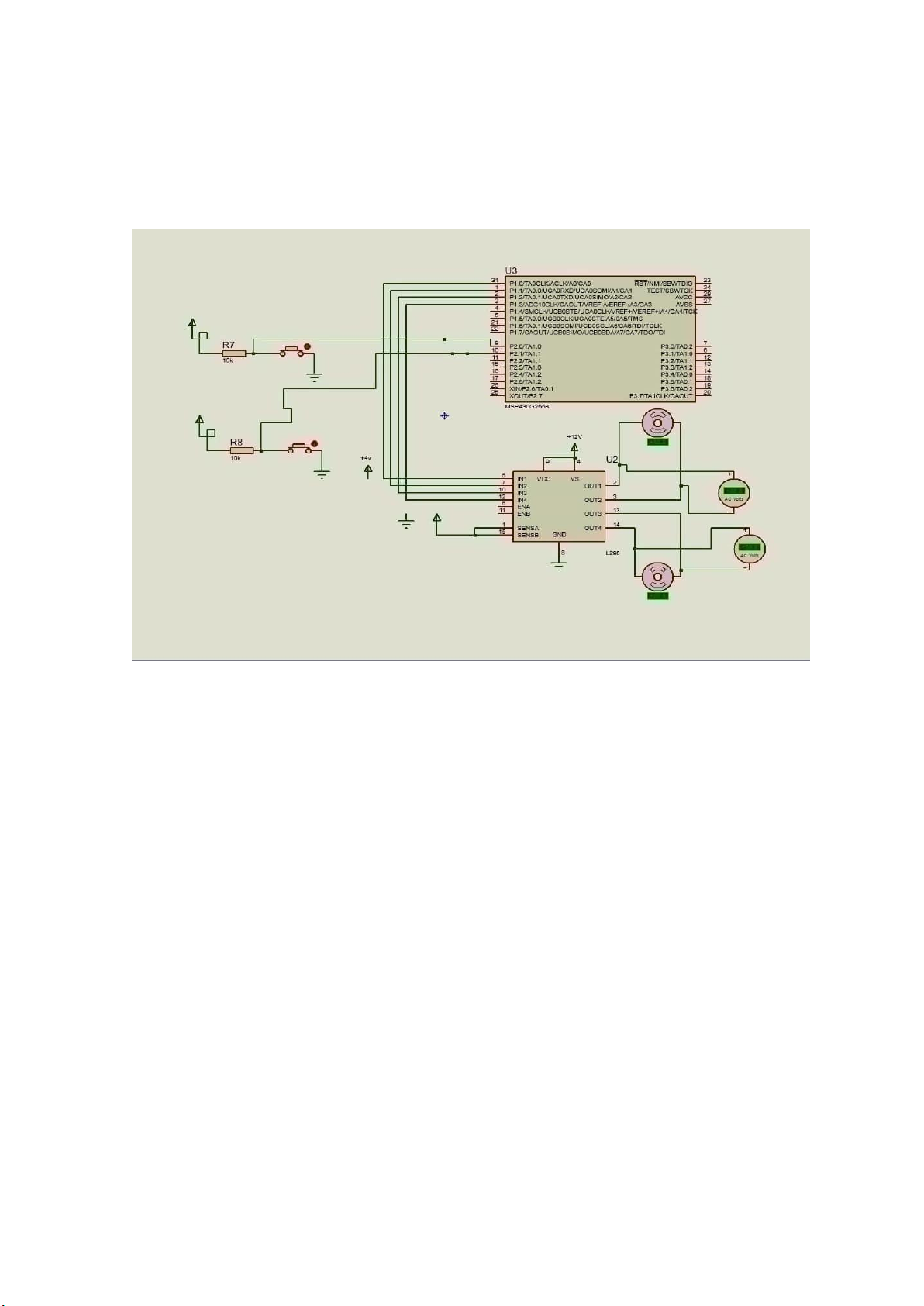
3.2 Sơ đồ toàn mạch kết nối vs linh kiện:
Hình 10 Sơ đồ đấu dây P1.0-IN1(L298N0) P1.1-IN2(L298N0) P1.2-IN3(L298N0) P1.3-IN4(L298N0)
P2.0- Vout (Cảm biến hồng ngoại)
P2.1- Vout (Cảm biến hồng ngoại)
3.3 Khối cảm biến:
Cảm biến hồng ngoại nhận thông tin từ bộ cảm biến. Sau đó cảm biến sẽ trả
thông tinvề module điều khiển L298N. Module cảm biến L298N nhận được thông tin
sẽ dùng thông tin để điều khiển động cơ. Mô phỏng khối cảm biến trên Protues* Khi
Led phát tín hiệu khi có tín phản lại thì quang trở sẽ thay đổi điện trở nó phát tín hiệu
vào để so sánh rồi đưa vào vi điều khiển để vi điều khiển xử lý rồi đưa ra tín hiệu để 19
phát lệnh điều khiển động cơ. Chức năng của khối: Tạo tín hiệu phản hồi về khối vi xử
lý trung tâm để từ đó điều khiển động cơ.
Nguyên lý hoạt động: Khi có ánh sáng thì điện trở của quang trở sẽ giảm và
ngược lại, điện trở của nó thay đổi cỡ từ 0.5k (khi có ánh sáng) đến 250k (không có
ánh sáng), ta sử dụng led phát làm nguồn sáng cho nó. Khi gặp nền trắng, ánh sáng sẽ
phản xạ lên quang trở làm điện trở nó giảm xuống và khi gặp vạch đen (băng keo đen)
thì ánh sáng sẽ khó phản xạ nên quang trở nhận ít ánh sáng => trở nó tăng. Từ đó dựa
vào 2 quang trở, robot có thể phân biệt được vạch đen. 3.4 Đường line:
3.5 Lưu đồ thuật toán: 20
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32