Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Các giá trị nàyđược đưa đến khối chuyển đổi tọa độ (khối 4) tiếp đến là khối điều chế vectorkhông gianSWPWM(khối2) đểtínhtoánđưaragiátrịđóng cắt cho vanbándẫn ở mạch động lực theo yêu cầu.
Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Tài liệu gồm 12 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:

Preview text:
Bài tập Tổng hợp hệ thống Truyền động điện
I.Tổng hợp hệ thống truyền động điện:
1.1 Cấu trúc điều khiển
Cấu trú điều khiển tựa theo từ thông rotor
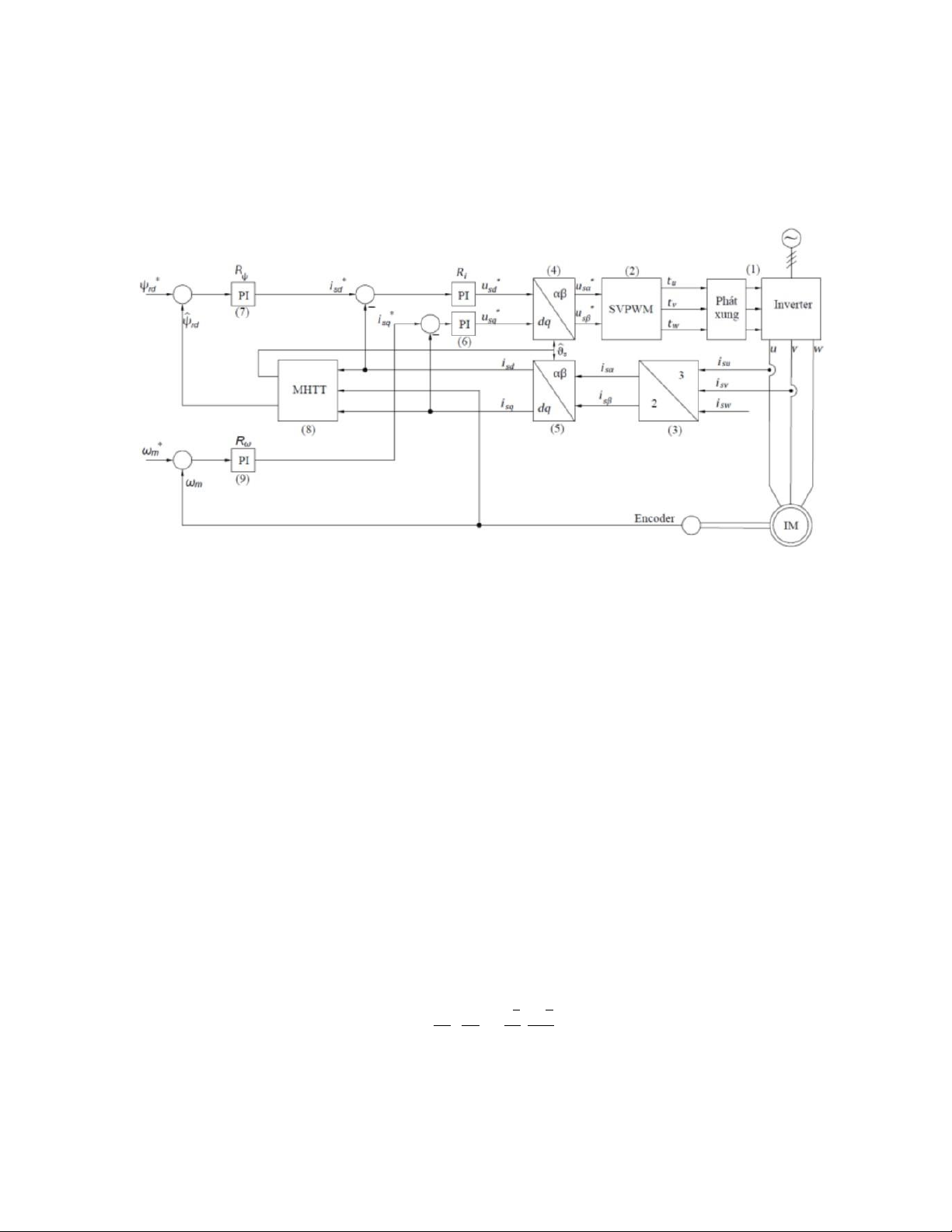
Cấu trúc điều khiển có dạng cascade, điều khiển tách biệt 2 thành phần tốc độ và từ
thông rotor của động cơ (dựa theo cấu trúc điều khiển hệ truyền động điện một chiều). Cụ
thể hơn, cấu trúc gồm 2 mạch vòng điều khiển, đó là vòng bên ngoài với bộ điều khiển từ
thông (khối 7) và bộ điều khiển tốc độ (khối 9) theo PI, vòng bên trong bao gồm hai bộ
điều khiển độc lập PI (khối 6), điều khiển hai thành phần dòng một chiều isd và isq bằng
tính toán các giá trị mong muốn 𝑢∗ và 𝑢∗ . 𝑠𝑞 𝑠𝑑
Các giá trị này được đưa đến khối chuyển đổi tọa độ (khối 4) tiếp đến là khối điều chế
vector không gian SWPWM (khối 2) để tính toán đưa ra giá trị đóng cắt cho van bán dẫn
ở mạch động lực theo yêu cầu.
1.2 Các thành phần trong cấu trúc điều khiển
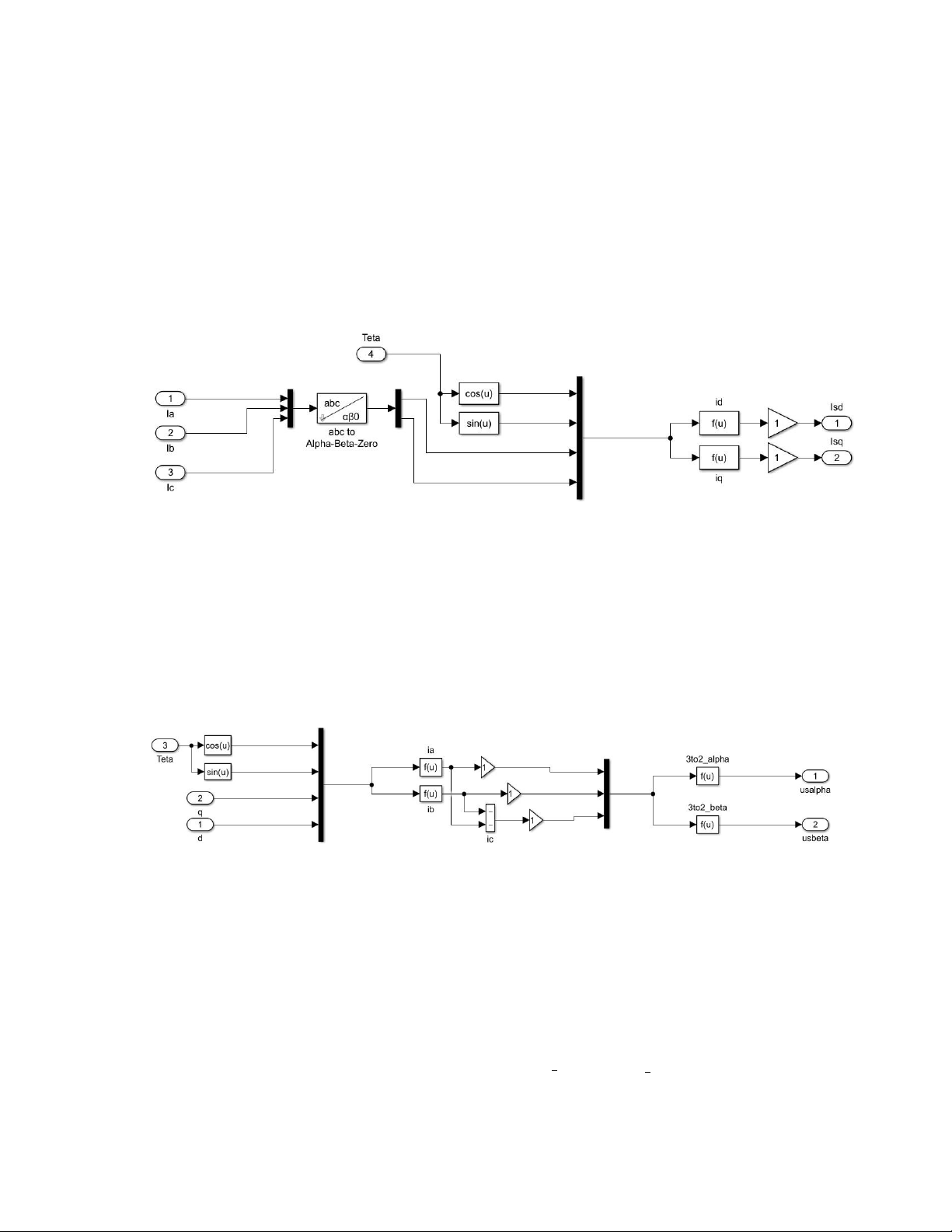
1.2.1 Các khối chuyển đội tọa độ
a) Chuyển tọa độ uvw sang dq
Áp dụng công thức chuyển đổi Clarke, chuyển đổi hệ tọa độ uvw sang hệ tọa độ cố định αβ:
[iα iβ] = [1 −1 −1 0 2 − √
√2] [𝑖𝑢 𝑖𝑣 𝑖𝑤] 2 2 3 3
Áp dụng công thức chuyển đổi Park, chuyển đổi từ hệ tọa độ cố định αβ sang hệ tọa độ dq quay:
[id iq] = [ cosθ − sinθ sinθ cosθ] [𝑖α iβ ] Hay:
{id = i.cos(ϑ𝑠) + i.sin(ϑ𝑠) ; iq = − 𝑖 α . 𝑠𝑖𝑛(ϑ𝑠) + 𝑖 β . 𝑐𝑜𝑠(ϑ 𝑠)}
Điều kiện chuyển đổi: Phải biết góc ϑ𝑠 của vector từ thông r
ϑ 𝑠 = ϑ 𝑠 (0) + ∫ ω𝑠 . 𝑑t + Sơ đồ chuyển đổi:
Khâu chuyển đổi tọa abc sang dq
b) Chuyển đổi tọa độ dq sang αβ (khối 4)
Sử dụng công thức chuyển đổi Park ngược, chuyển từ hệ tọa độ quay dq sang hệ tọa độ cố định αβ + Sơ đồ chuyển đổi
Khâu chuyển đổi tọa độ từ dq sang αβ
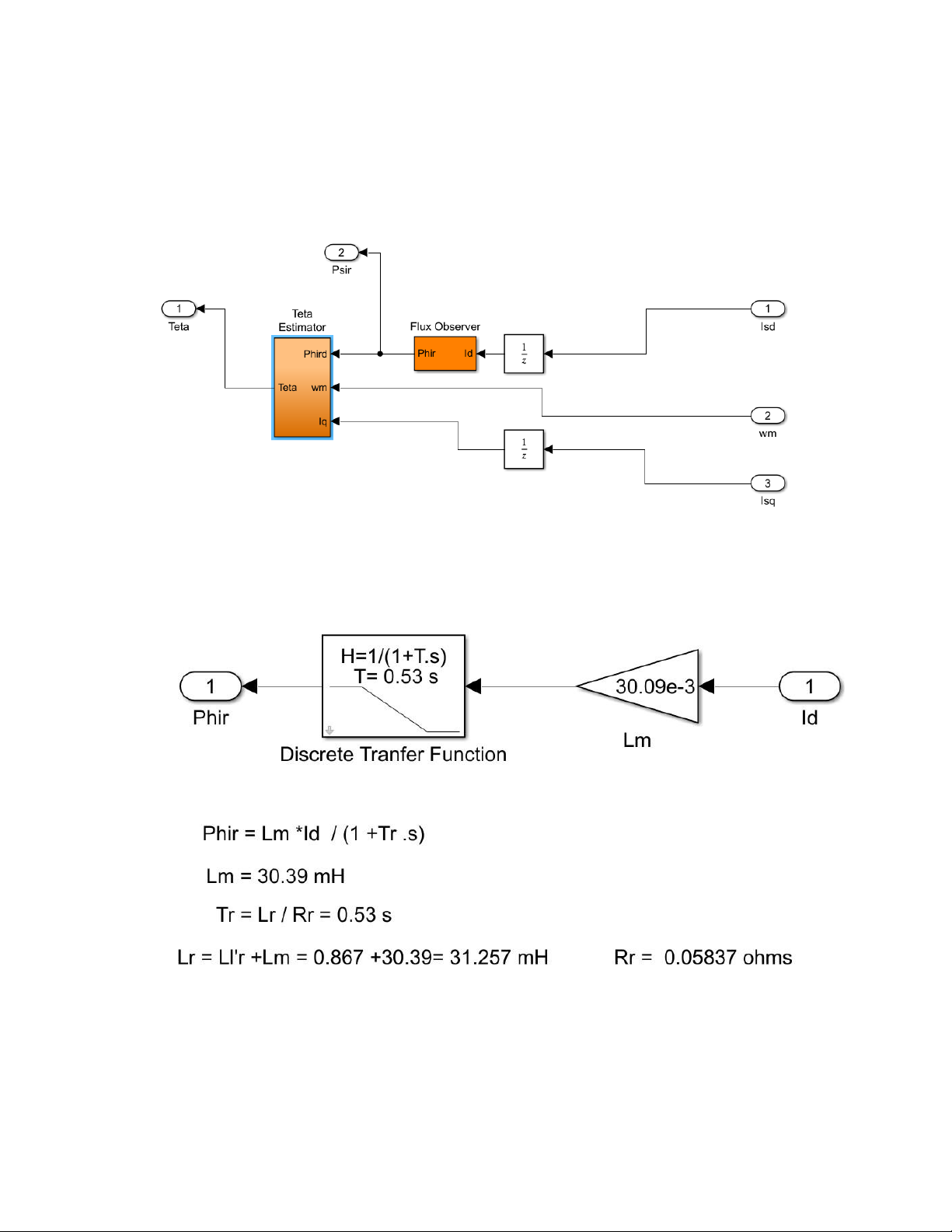
1.2.2 Khối mô hình từ thông (khối 8)
Khối mô hình từ thông có nhiệm vụ tính các giá trị từ thông rotor r và góc quay ϑ 𝑠 dựa
trên cơ sở các đại lượng đo được isd, isq và wm. Công thức: 𝐿 { ϑ
ϑ (0) + ∫ ω . 𝑑ω = 𝑚𝑖𝑠𝑞 = 𝐿𝑚𝑖𝑠𝑑} 𝑠 = 𝑠 𝑠 s 𝑇𝑟 𝑟𝑑 1+𝑠𝑇 𝑟𝑑 𝑟
{Lm = 30.39 mH, Lr’ + Lm = 31.257 mH, Rr= 0.05837 ohms, Tr = 0.53s} + Mô hình toán học: -Tổng quát: - Khối Flux Observer: - Khối Teta Estimator
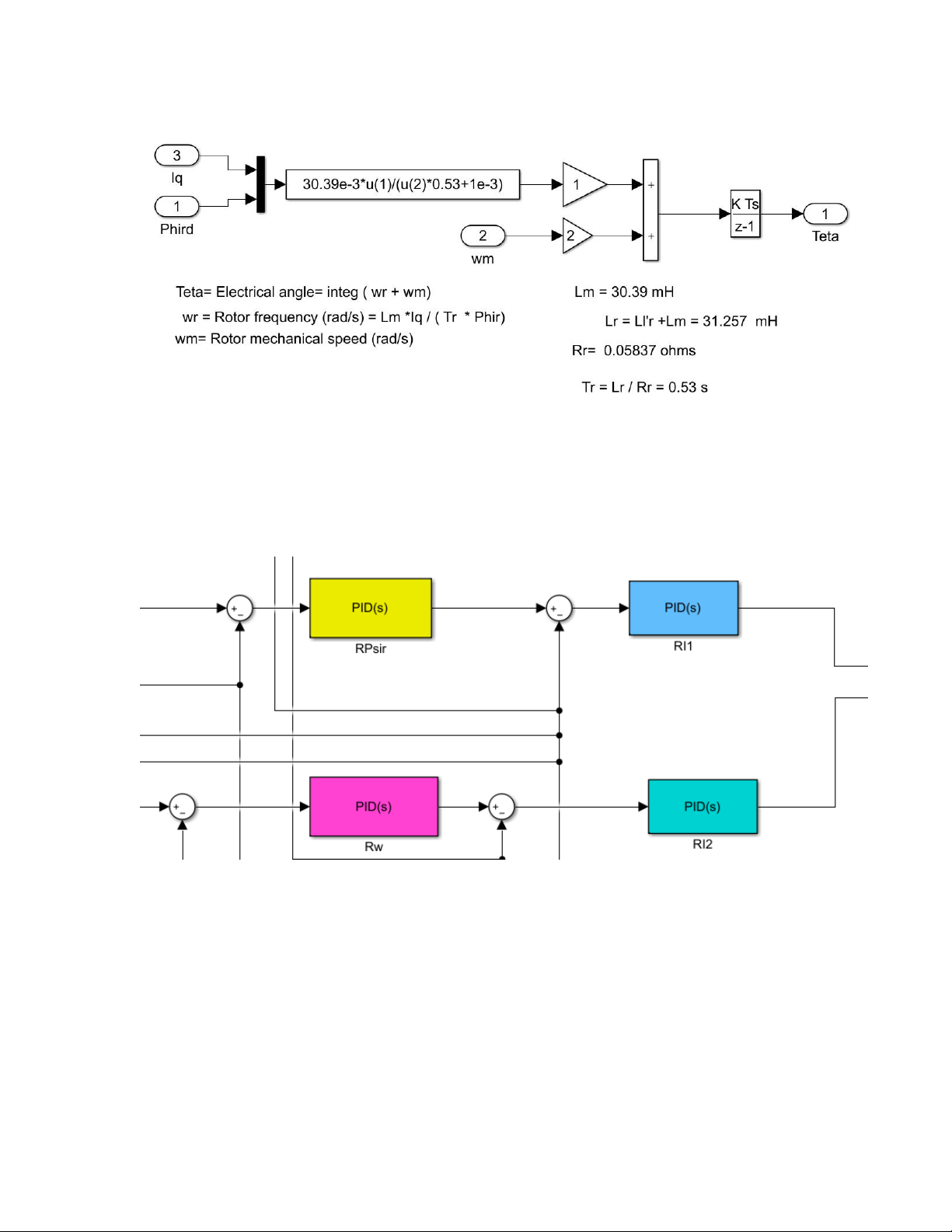
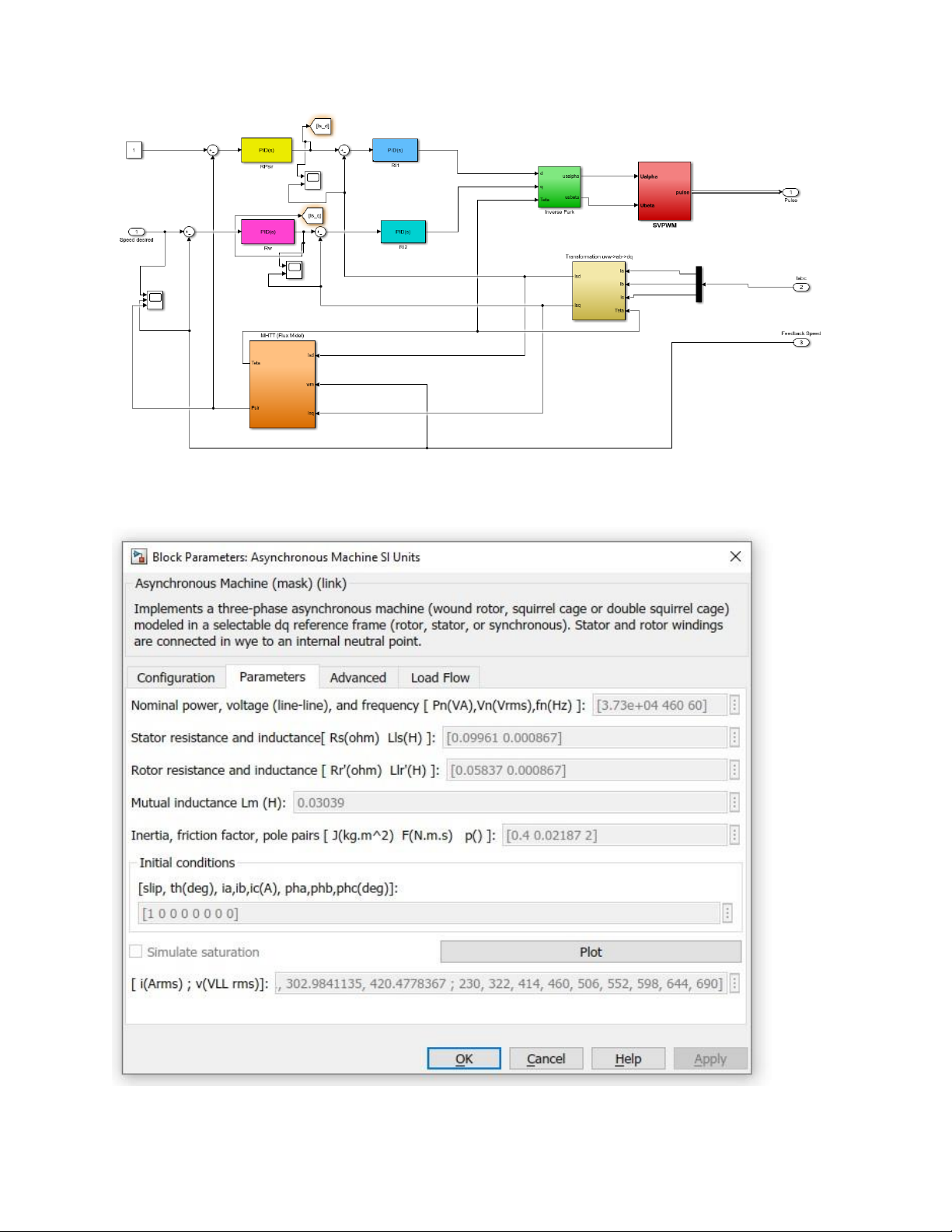
1.2.3 Các bộ điều khiển (khối 6, 7, 9)
Các bộ điều khiển bao gồm: 1 bộ điều khiển từ thông, 1 bộ điều khiển tốc độ, 2 bộ
điều khiển dòng điện (dòng isq và dòng isd). Các bộ điều khiển này hoạt động dựa trên thuật toán PI.
Các bộ điều khiển PI
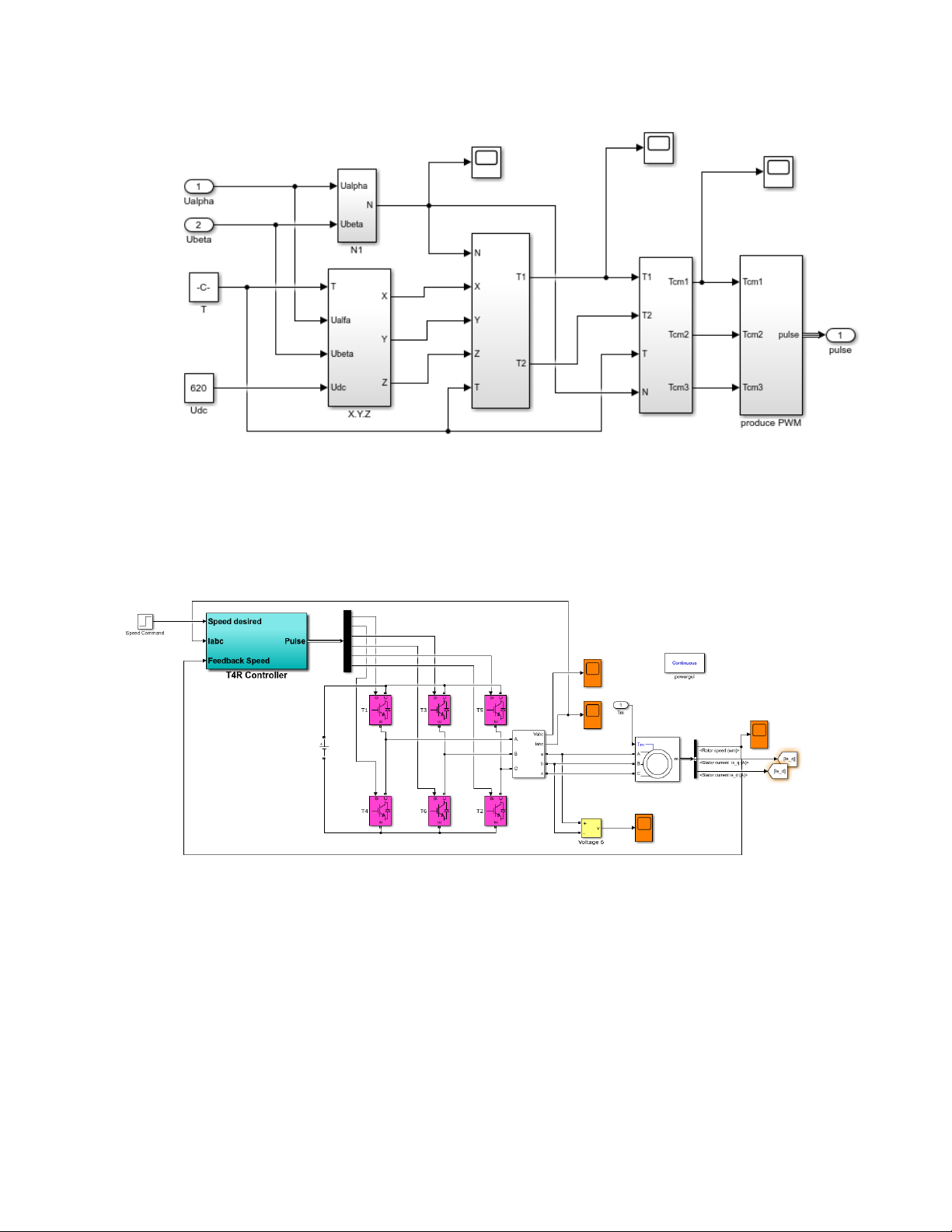
1.2.4 Khối điều chế vector không gian SVPWM (khối 2)
Khâu điều chế vector không gian SVPWM nhận các giá trị điện áp mong muốn usα và
usβ, tính toán đưa ra các tín hiệu đóng ngắt tu, tv, tw.
Khâu điều chế vector không gian SVPWM
II. Mỏ phỏng, kiểm nghiệm
1. Sơ đồ mô phỏng tổng quát Trong sơ đồ gồm có + Nguồn DC 620V
+ Mạch ngịch lưu có điều khiển bằng van IGBT
+ Bộ điều khiển phát xung
+ Động cơ ba pha không đồng bộ
2. Sơ đồ bộ điều khiển T4R controller: 3. Thông số động cơ
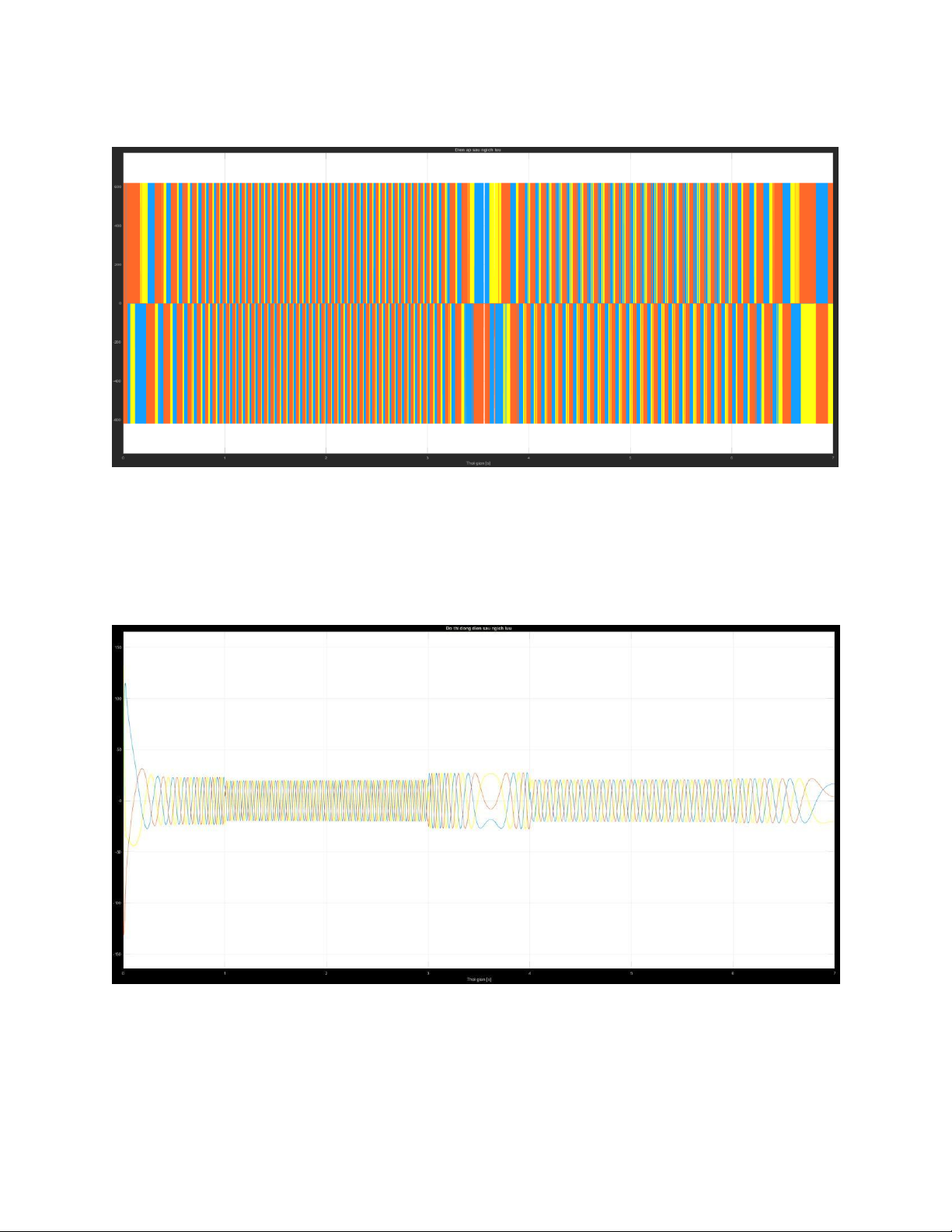
4.1. Thành phần điện áp
Đồ thị điện áp ra sau ngịch lưu
Điện áp sau ngịch lưu cung cấp cho động cơ hàng xung theo phương pháp SVPWM
4.2 Các thành phần dòng điện
a) Dòng điện ra sau nghịch lưu
Đồ thị biểu diễn dòng điện ra sau nghịch lưu
Trong quá trình khởi động ban đầu, dòng điện tương đối lớn, tuy nhiên cũng ổn định sau đó.
Trong thời gian động cơ chạy với tốc độ là hằng số (khoảng 1-3s và khoảng 4-6s), dòng điện ổn định
Khi động cơ thực hiện quá trình tăng tốc, giảm tốc hay đảo chiều, dòng điện tăng lên
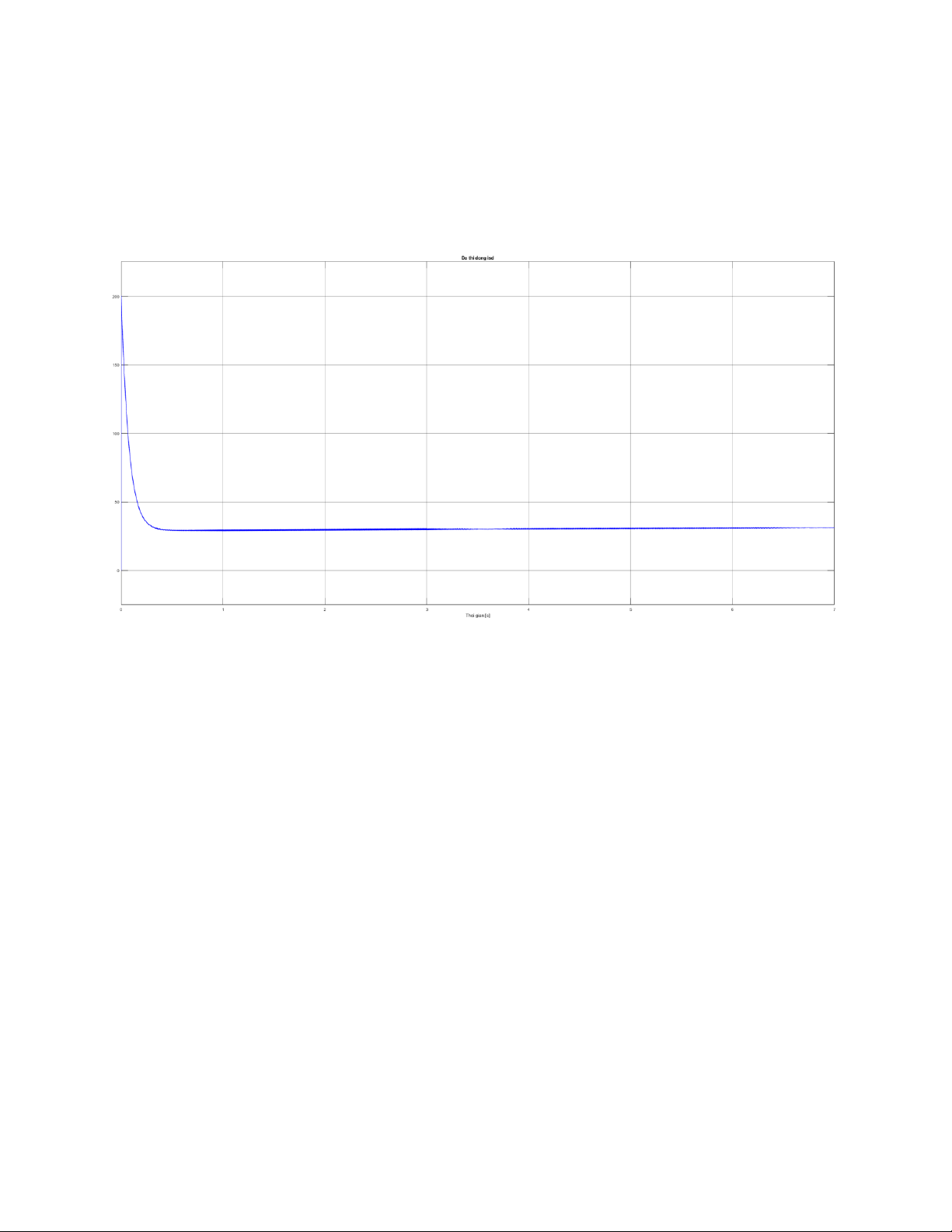
nhưng vẫn đảm bảo trong mức độ cho phép b) Dòng điện isd:
Đồ thị biểu diễn thành phần trục d của dòng điện stator (isd) theo thời gian
Khi khởi động, dòng isd tăng lên nhanh đột ngột nhưng sau đó giảm xuống ổn định. Dòng
isd bám sát theo isd* và mang tính chất tương đối của thành phần một chiều, giữ ổn định
dưới dạng là hằng số, đúng với thuật toán đề ra c) Dòng điện isq:
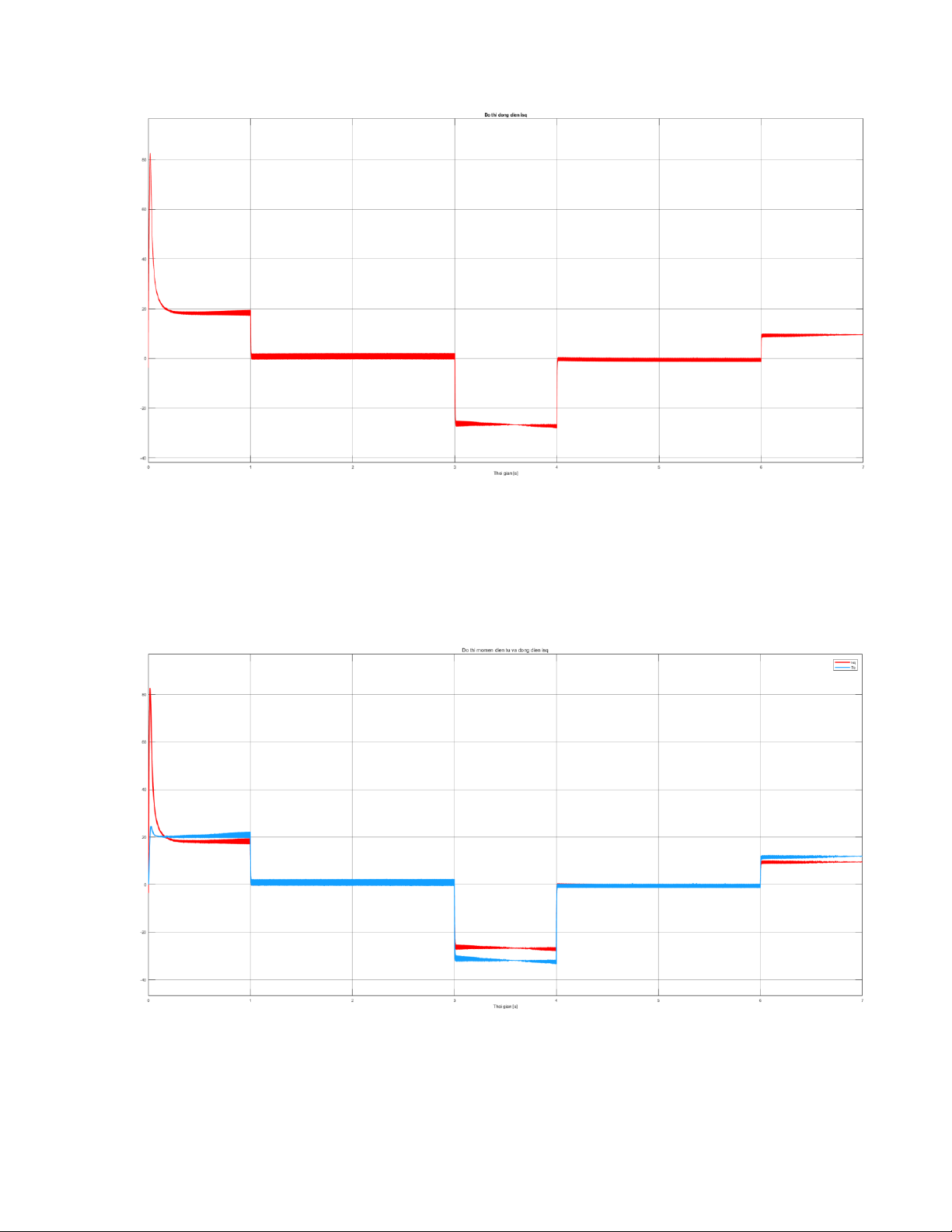
Đồ thị biểu diễn thành phần trục q của dòng điện stator (Isq) theo thời gian
d) Mối liên hệ giữa momen quay và isq
Thành phần dòng isq khi khởi động tăng lên đột ngột, sau đó ổn định dần. Tuy nhiên, isq
còn chưa ổn định, nhấp nhô nhiều. Cần phải cải thiện bằng cách điều chỉnh các tham số
trong bộ điều khiển PI
Đồ thị biễu diễn mối tương quan giữa thành phần momen quay và dòng điện isq Theo như trong công thức 3 2 𝑚 = 𝑧 𝐿𝑚 ′ 𝑖 𝑀 2 𝑝 𝐿 𝑟𝑑 𝑠𝑞 𝑟
Kiểm tra đồ thị cho thấy momen quay tỉ lệ với thành phần isq như công thức, vậy phương
pháp điều khiển đúng với kết quả tính toán.
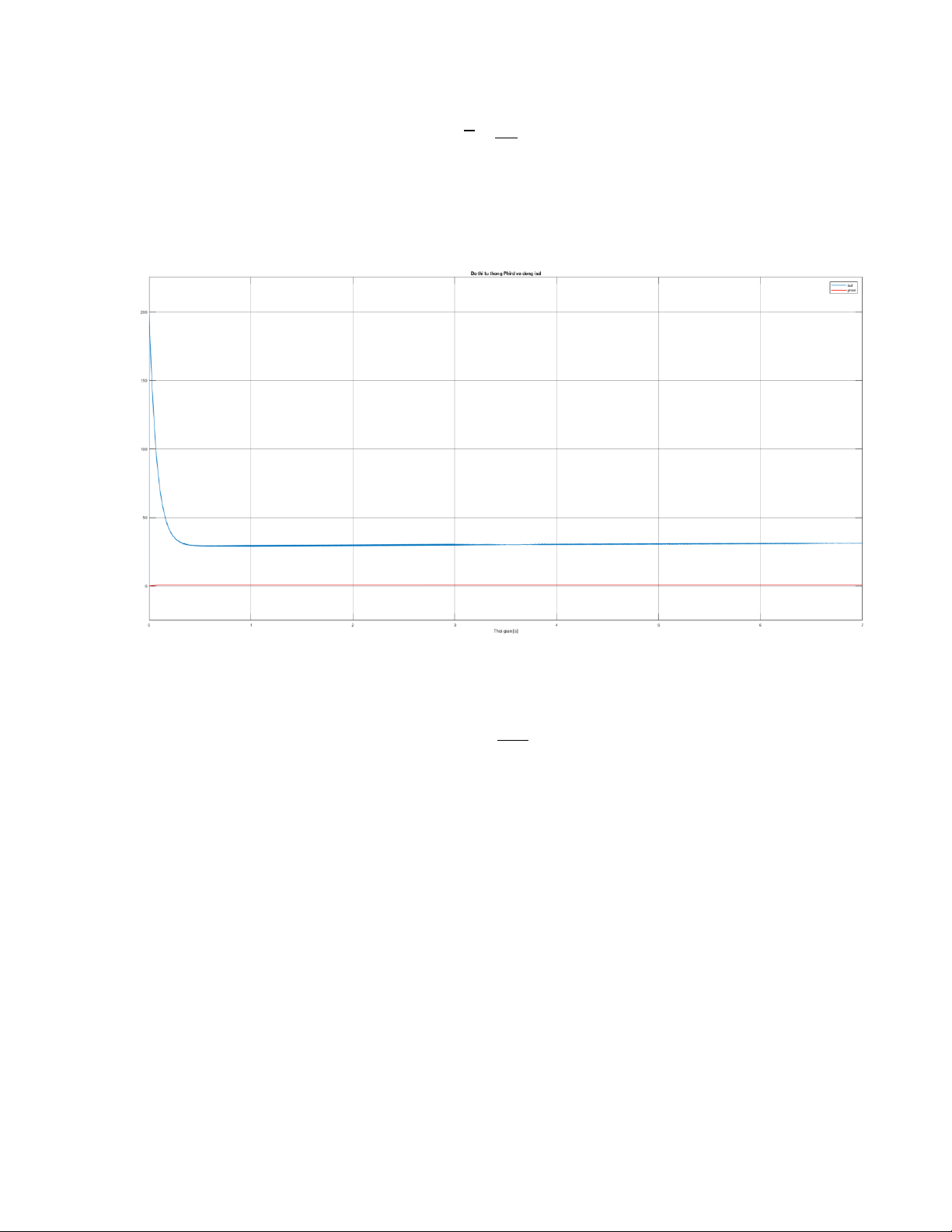
e) Mối liên hệ giữa rd và isd
Đồ thị biểu diễn mối liên hệ giữa rd và isd
Theo như trong công thức: ′ 𝑖 = 𝑠𝑑 𝑟𝑑 1+𝑠𝑇𝑟
Kiểm tra đồ thị ta thấy: từ thông rd tỉ lệ thành phần isd như công thức, vậy phương pháp
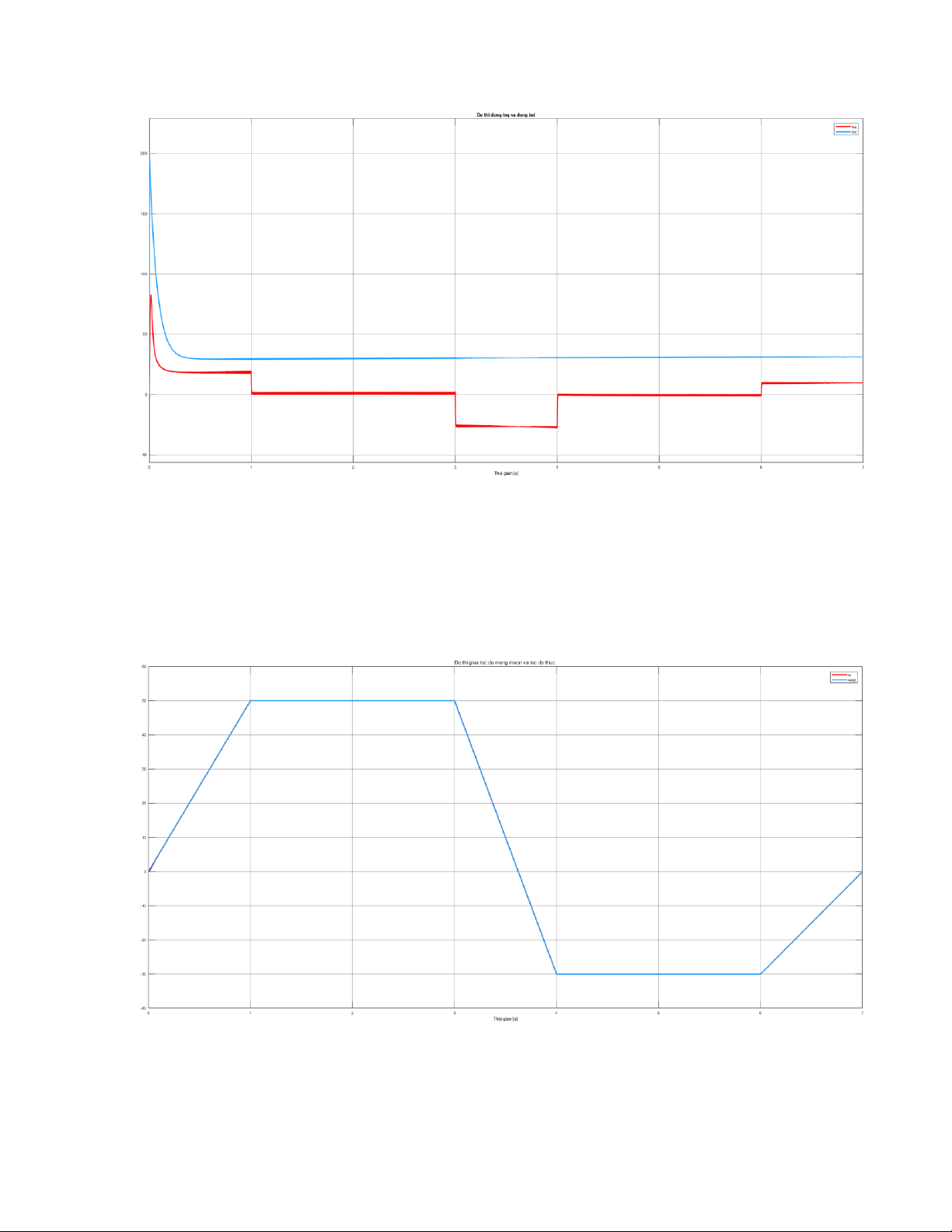
điều khiển đúng với kết quả tính toán g) Dòng điện isq và isd
Đồ thị biễn diễn isq và isd
Như trên đồ thị ta thấy, hai thành phần isq và isd được tách thành hai thành phần riêng biệt
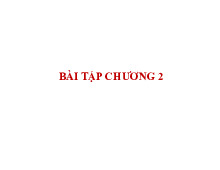
ít ảnh hưởng lẫn nhau, đúng với thuật toán đề ra. 4.3 Tốc độ động cơ
Đồ thị tốc độ động cơ mong muốn và tốc độ động cơ thực
Theo đồ thị, trong quá trình khởi động động cơ, tốc độ có lệch so với tốc độ mong muốn
nhưng trong ngưỡng chấp nhận. Sau khoang thời gian đó, tốc độ động cơ bám sát theo
tốc độ mong muốn, kể cả lúc tăng tốc, giảm tốc hay đảo chiều.
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32