Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Robot2bậctựdolàloạirobotcó 2khớp chuyểnđộngđộclập,chophépđầucôngtác(end- effector) di chuyển trong một mặt phẳng (2D).
Đề cương môn Truyền động điện - Trường Đại học bách khoa - Đại học đà nẵng.
Tài liệu gồm 25 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:






Preview text:
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC BÁCH KHOA KHOA ĐIỆN BÁO CÁO GIỮA KÌ
ĐIỀU KHIỂN TỰ ĐỘNG TRUYỀN DỘNG ĐIỆN TRONG CÔNG NGHIỆP ĐỀ TÀI:
THIẾT KẾ HỆ TRUYỀN ĐỘNG PMSM ĐIỀU KHIỂN VỊ TRÍ CHO CÁNH TAY ROBOT
Người hướng dẫn: TS. NGUYỄN KHÁNH QUANG
Sinh viên thực hiện: Võ Đoàn Thành Nhân -22TDH3-105220358
Hoàng Ngọc Thành-22TDH3-105220365
Lương Văn Duân-22TDH3-105220338
Dương Hữu Tiến Đạt-22TDH3--105220336
Phan Minh Quân-22TDH3--105220361
Nhóm HP / Lớp: 21.32
Ngành: Kỹ thuật điều khiển và tự động hóa Đà Nẵng, 2025 Mục Lục I.
Giới thiệu điều khiển vị trí hệ truyền động điện trong robot 2 bậc tự do 2DOF ............. 4 1.
Tổng quan về Robot 2 Bậc Tự Do (2DOF) ...................................................................... 4 3.
Hệ điều khiển vị trí ............................................................................................................ 5
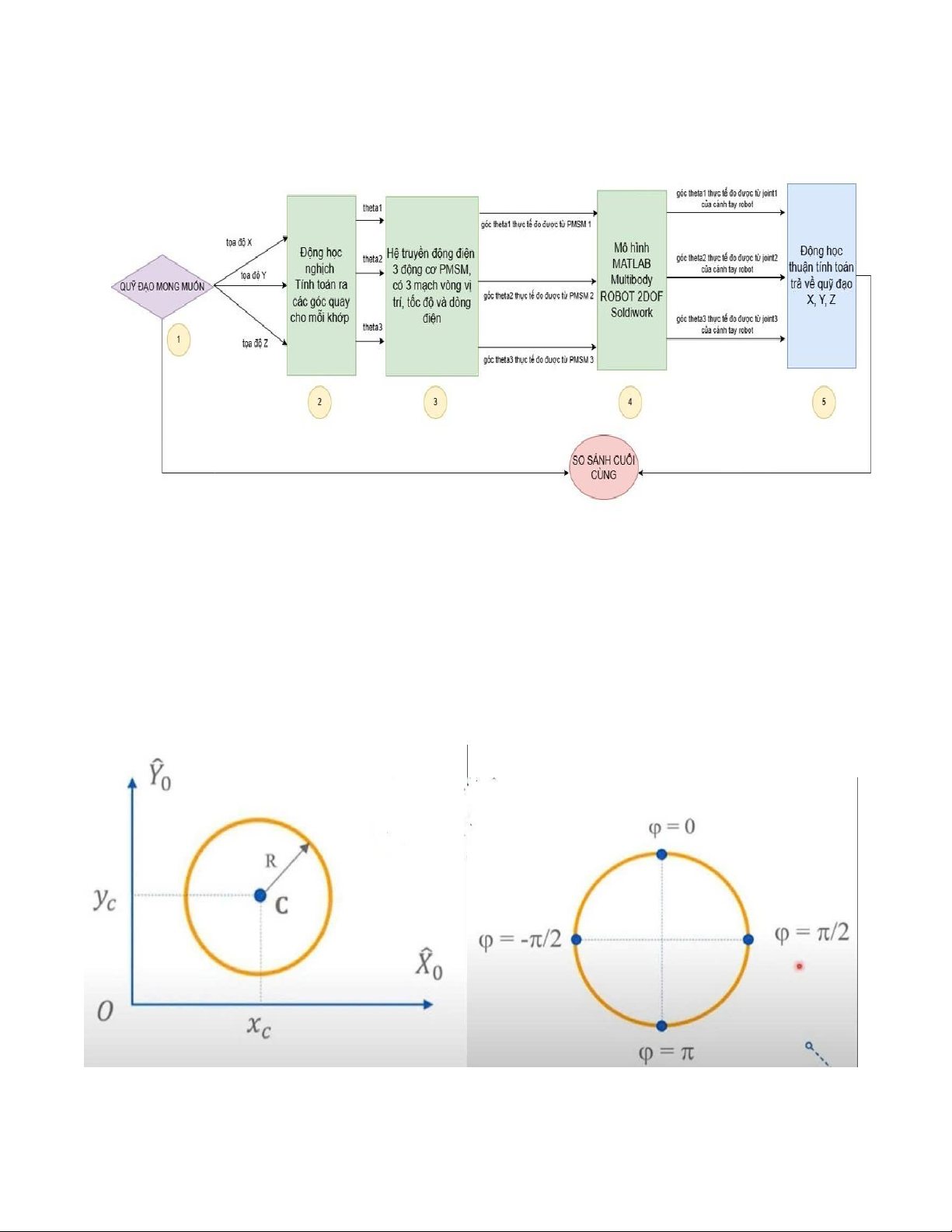
II. Cấu trúc tổng quan sơ đồ khối đề tài .................................................................................. 5
III. Tính toán vị trí theo quỹ đạo của robot 2 bậc tự do 2DOF ............................................... 6 1.
Phân tích quỹ đạo chuyển động ....................................................................................... 6 2.
Động học thuận .................................................................................................................. 8
a) Thông số động học của cánh tay robot ........................................................................ 8
b) Ma trận biến đổi đồng nhất .......................................................................................... 9 c)
Tọa độ của đầu công cụ ................................................................................................ 9 3.
Động học nghịch ................................................................................................................ 9
IV. Thiết kế hệ truyền động điện điều khiển vị trí cho động cơ PMSM ............................... 10 1.
Mô tả toán học động cơ PMSM ...................................................................................... 10 2.
Phương pháp điều khiển, thuật toán điều khiển vị trí - Điều khiển Tựa theo từ thông
Rotor (Field-Oriented Control - FOC) .................................................................................. 12 3.
Thiết kế bộ điều khiển ..................................................................................................... 13 a.
Thiết kế bộ điều khiển dòng điện ............................................................................... 13 b.
Thiết kế bộ điều khiển tốc độ ..................................................................................... 14 c.
Bộ điều khiển vị trí ...................................................................................................... 15
V. Mô phỏng và kết quả ........................................................................................................... 18 1.
Cấu trúc toàn bộ hệ thống .............................................................................................. 18 2.
Cấu trúc từng khâu chức năng ...................................................................................... 18
a) Khâu quỹ đạo ............................................................................................................... 18
b) Khâu động học nghịch ................................................................................................ 18 c)
Khâu động học thuận .................................................................................................. 19
d) Mô hình Robot 2DOF ................................................................................................. 19 e)
Khâu điều khiển vị trí hệ truyền động điện PMSM ................................................. 20 f)
Bảng tham số động cơ PMSM .................................................................................... 21 3.
Kết quả mô phỏng MATLAB Simulink ........................................................................ 21
Kết quả so sánh quỹ đạo hình tròn mong muốn và quỹ đạo vẽ ra từ Robot 2DOF ...... 21 I.
Giới thiệu điều khiển vị trí hệ truyền động điện trong robot 2 bậc tự do 2DOF
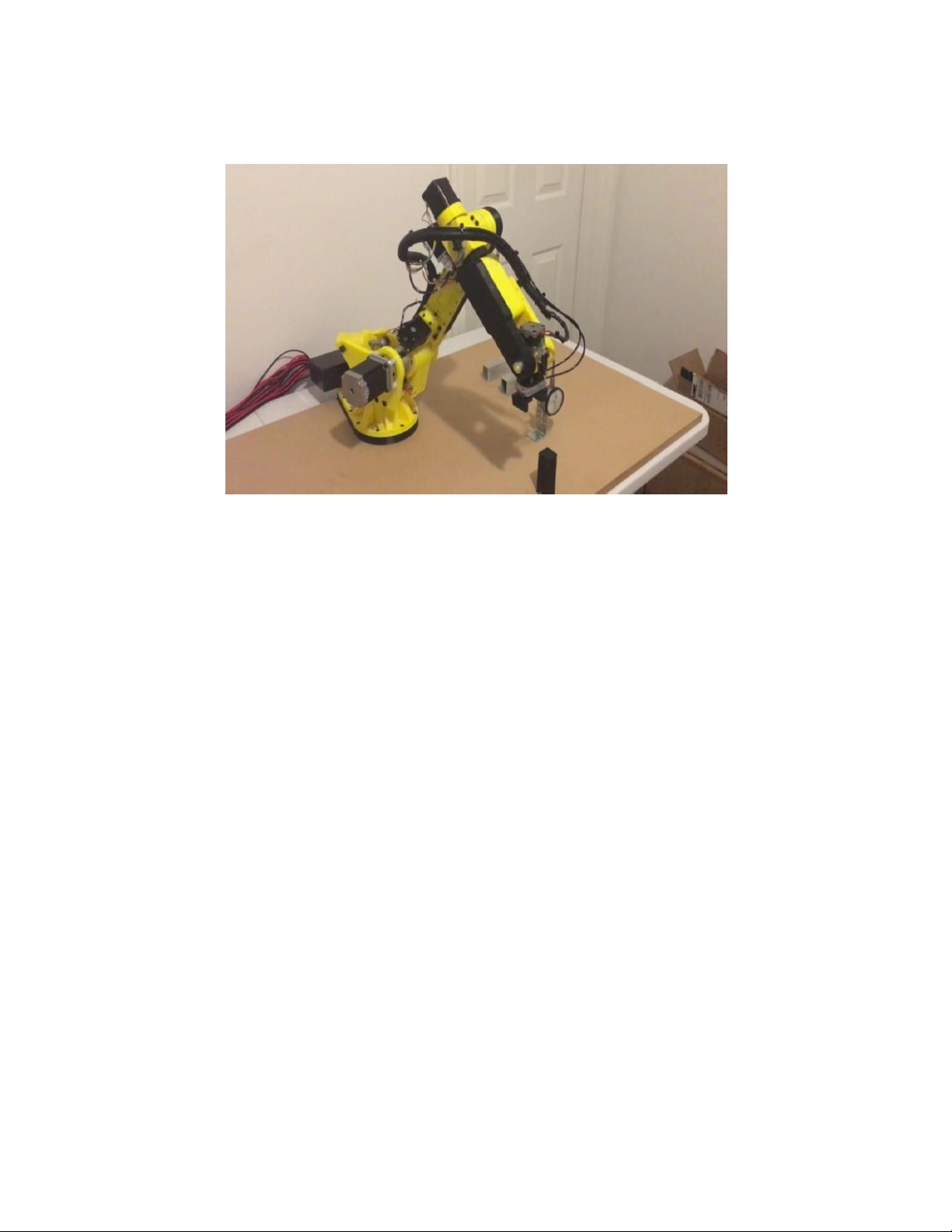
1. Tổng quan về Robot 2 Bậc Tự Do (2DOF) Hình 1.1 Khái niệm
-Robot 2 bậc tự do là loại robot có 2 khớp chuyển động độc lập, cho phép đầu công tác (end-
effector) di chuyển trong một mặt phẳng (2D).
-Mỗi bậc tự do (DOF) tương ứng với một tham số độc lập mô tả vị trí/động học của robot (ví dụ: góc quay, độ trượt). Ứng dụng
• Nghiên cứu, giảng dạy động học và điều khiển robot.
• Máy CNC mini, cánh tay gắp đặt chi tiết trên băng tải.
• Các cơ cấu cơ khí phẳng trong tự động hóa
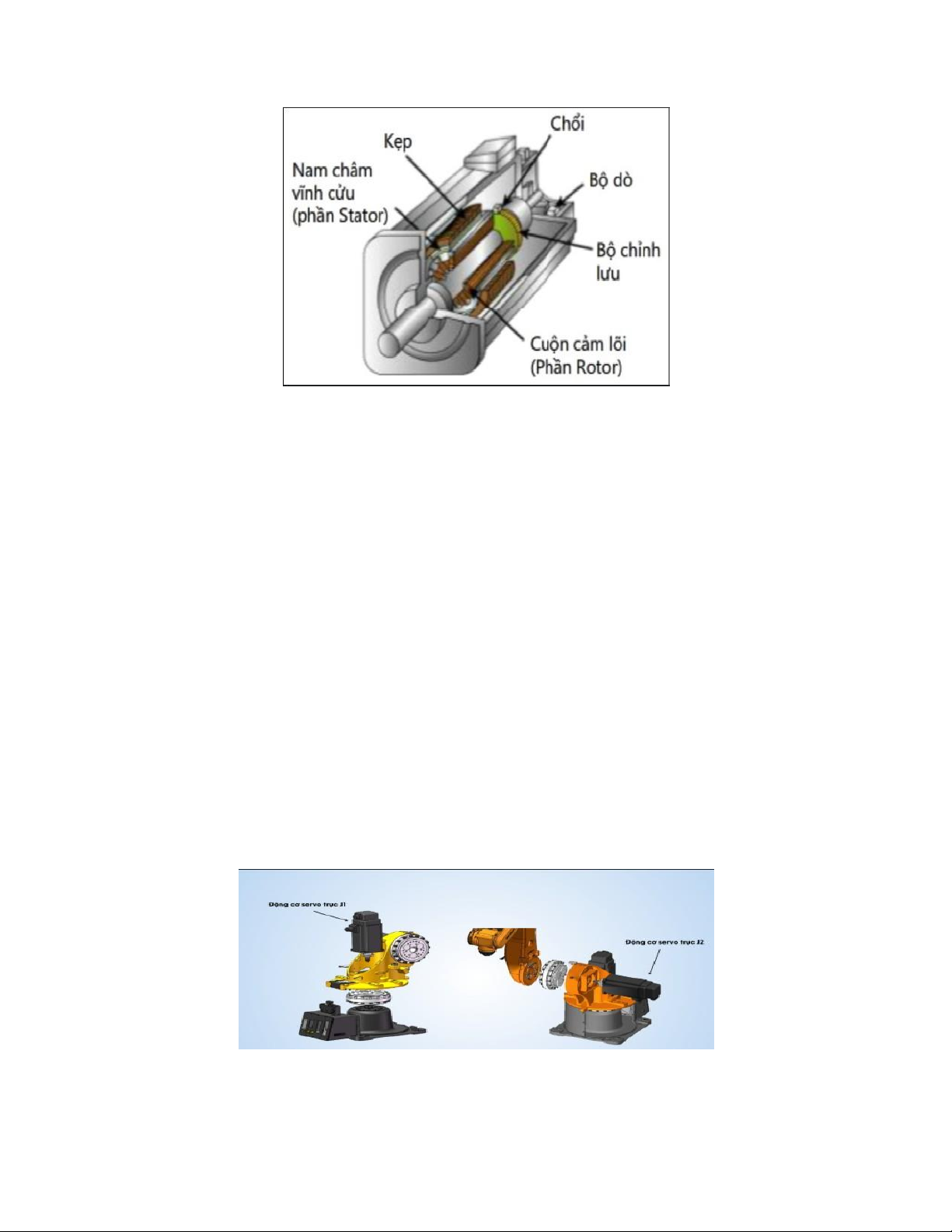
2. Động cơ Đồng bộ Nam châm Vĩnh cửu (PMSM) trong Hệ Truyền động Khái niệm
• PMSM là động cơ đồng bộ nam châm vĩnh cửu.
• Rotor có gắn nam châm vĩnh cửu (thay vì cuộn dây kích từ như động cơ đồng bộ truyền thống).
• Khi cấp nguồn xoay chiều 3 pha vào stator, từ trường quay của stator đồng bộ với từ
trường rotor → rotor quay cùng tốc độ đồng bộ (không có trượt như động cơ không đồng bộ). Hình 1.2a Ưu điểm:
• Hiệu suất cao (do không cần dòng kích từ rotor).
• Mật độ công suất lớn (gọn nhẹ, moment xoắn cao).
• Điều khiển chính xác tốc độ và vị trí.
• Tổn thất đồng thấp, ít sinh nhiệt ở rotor Nhược điểm:
• Giá thành cao (nam châm vĩnh cửu đắt).
• Khó chế tạo nam châm công suất lớn.
• Nhạy cảm với nhiệt độ (nam châm có thể mất từ tính nếu quá nóng). Ứng dụng
• Ô tô điện, xe máy điện.
• Robot công nghiệp, servo motor.
• Máy nén khí, máy bơm tiết kiệm năng lượng.
• Ổ đĩa cứng, quạt công nghiệp, máy bay không người lái (drone). Hình 1.2b 3.
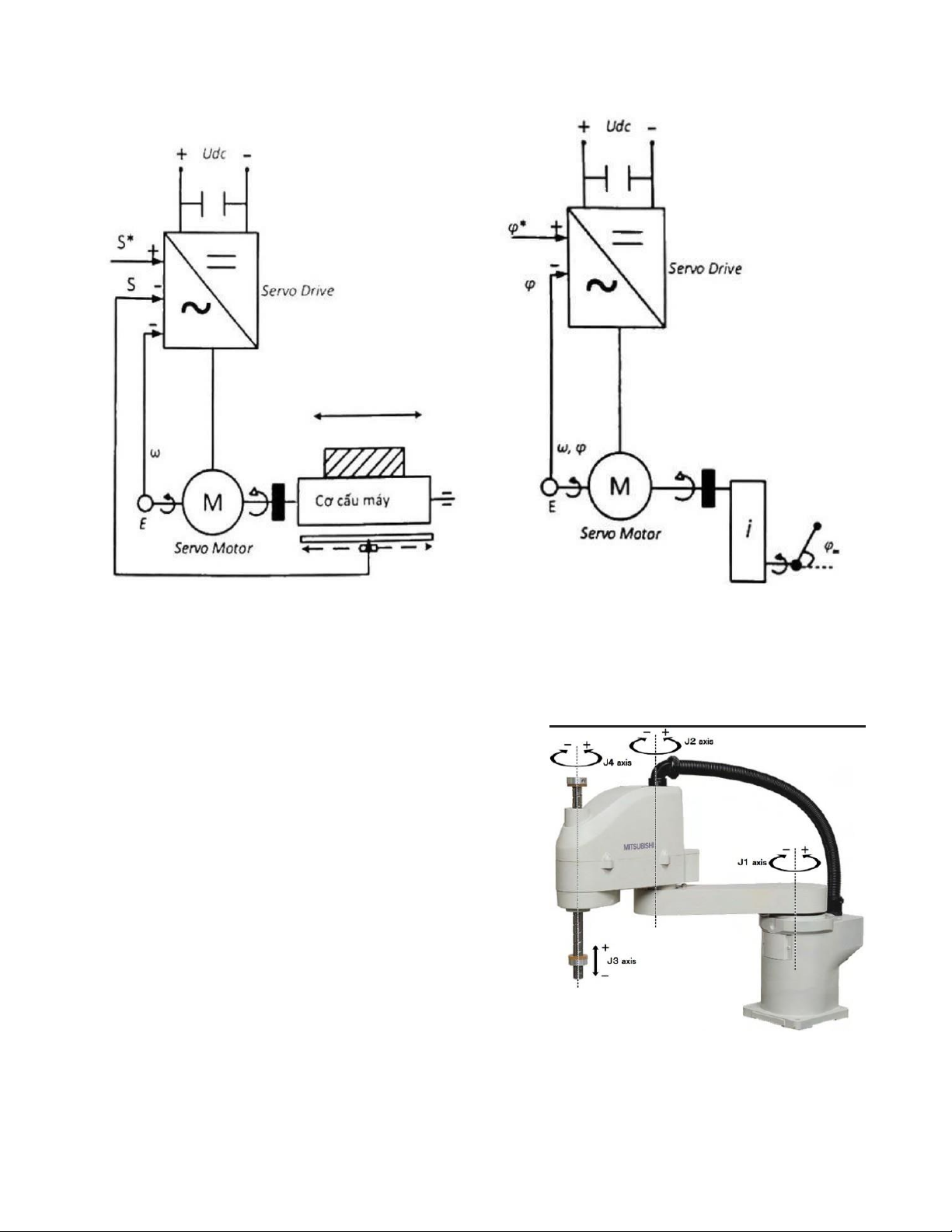
Hệ truyền động vị trí Khái niệm
• Là điều khiển động cơ tác động lên một cơ cấu chấp hành dịch chuyển một quảng đường
đã chọn hoặc quay một góc đặt trước .
• Đại lượng cần điều khiển là quảng đường dịch chuyển hay một góc đặt trước .
• Đại lượng đều khiển là mô men (trong chuyển động quay) hay lực (trong chuyển động tịnh tiến ). Vai trò
• Có vai trò quan trọng trong thiết bị hay dây chuyền sản xuất tự động nó có đặc điểm công
suất nhỏ, yêu cầu tác động nhanh và độ chính xác cao. Phân loại : • Theo động cơ • Theo lượng đặt
• Theo trục tham gia trong quỹ đạo chuyển động Cấu trúc cơ bản
• Một hệ điều khiển vị trí cho robot 2 DOF thường gồm:
a) Vòng ngoài (điều khiển quỹ đạo / vị trí không gian)
-Đầu vào: tọa độ mong muốn ( x , y d d ).
-Bộ biến đổi (nghịch động học): tính toán ra góc khớp cần đạt (θ¿ , θ¿ ) 1 2 .
b) Vòng trong (điều khiển vị trí từng khớp)
-Mỗi khớp có một servo motor hoặc PMSM/stepper.
-Bộ điều khiển vị trí (thường là PID hoặc FOC – Field Oriented Control đối với PMSM).
-Cảm biến phản hồi: encoder đo góc quay.
-So sánh θ¿với θ → sinh lệnh dòng/áp cho động cơ. i i
Hình 1.3b Chuyển động tịnh tiến
Hình 1.3b Chuyển động tịnh tiến
4. Tổng quan về SCARA ROBOT
Cấu trúc: 2 khớp quay (R–R) + 1 khớp trượt (P),
thường thêm 1 khớp xoay cổ tay. Đặc điểm:
• Linh hoạt trong mặt phẳng XY.
• Cứng vững theo trục Z.
• Nhanh, chính xác, giá thành thấp hơn robot 6 trục.
• Không gian làm việc: dạng vòng khuyên trên XY + hành trình Z.
Ứng dụng: gắp–thả linh kiện, lắp ráp, đóng gói, CNC mini, máy in 3D.
II. Cấu trúc tổng quan sơ đồ khối đề tài Hình 2.1
III. Tính toán vị trí theo quỹ đạo của robot 2 bậc tự do
1. Phân tích quỹ đạo chuyển động
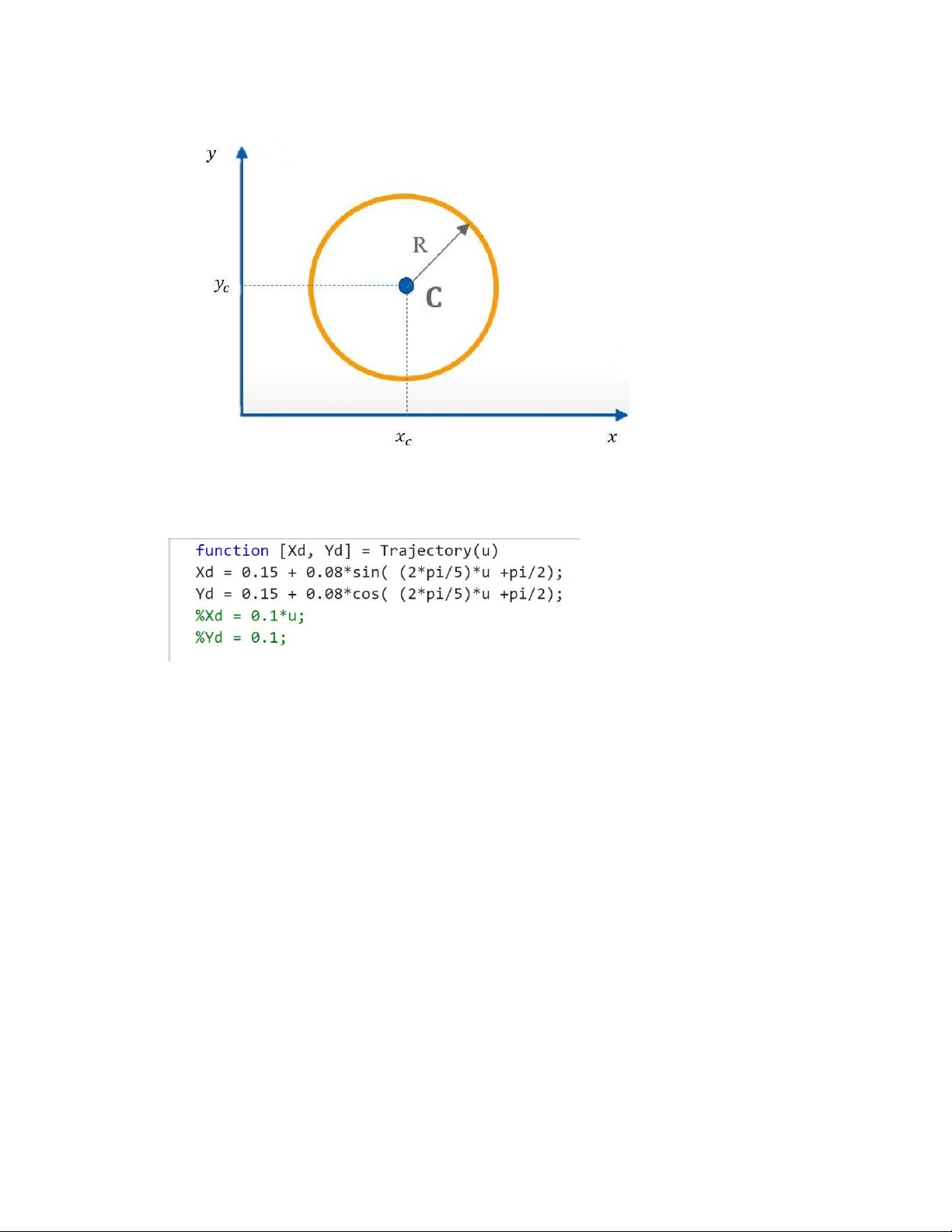
Quỹ đạo chuyển động của khâu cuối
Xd = x + R·sin(ωt + φ) C
Yd = yC + R·cos(ωt + φ) Hình 3.1
Ta có quỹ đạo hình tròn: •
�� = �� + ����(�� + �)
{ �� = �� + ����(�� + �) • Trong đó,
��, �� là toạ độ tâm hình tròn bán kính R
Từ đó ta chọn tâm hình tròn (��, ��) = (0.15,0.15) với bán kính 0.08
2. Động học thuận
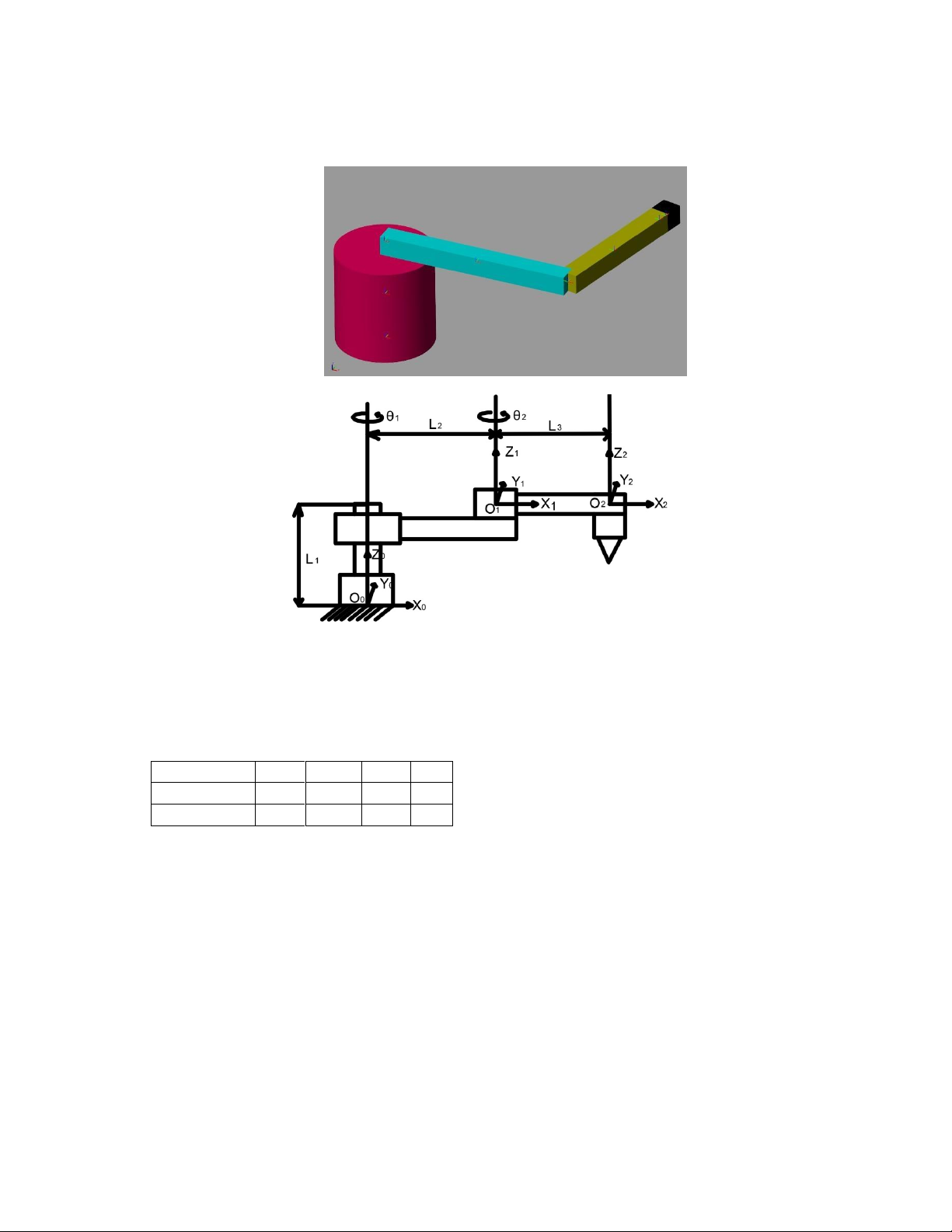
Hình 3.2 Biểu diễn cánh tay hai bậc trên mặt phẳng tọa độ xyz
a) Thông số động học của cánh tay robot
Cánh tay robot bao gồm hai liên kết (link) với các thông số Denavit-Hartenberg như sau: Frame No. ai αi di θi 1 L2 0 L1 θ1 2 L3 0 0 θ2 Trong đó:
• L1 và L2, L3 lần lượt là chiều dài của thanh 1, thanh 2, thanh 3
• θ1và θ2 là các góc quay của khớp 1 và khớp 2.
b) Ma trận biến đổi đồng nhất
Ma trận biến đổi đồng nhất 0T1 từ gốc đến khớp thứ nhất được xác định như sau:
����1 −����1 0 �2����1 ���� ����1 0 1 ����1 0 2 T =[ � ] 01 0 1 �1 0 0 0 1
Tương tự, ma trận biến đổi 1T2 từ khớp thứ nhất đến khớp thứ hai là:
����2 −����2 0 �3����2 ���� ����2 0 ���� 1 2 T 2 0 �3 2 =[ 0 1 0 ] 0 0 0 1
Ma trận tổng hợp 0T2 từ gốc đến khớp thứ hai là: cos(�1 + �2) −sin(�1 + �2)
0 �2����1 + �3cos(�1 + �2) sin(� 0T 1 1 + �2) cos(�1 + �2) 0
�2����1 + �3sin(�1 + �2) 2 = 0T1 T2 = [ ] 0 0 1 � 1 0 0 0 1
c) Tọa độ của đầu công cụ
Dựa vào ma trận tổng hợp 0T2, ta có thể xác định tọa độ của đầu công cụ (end-effector) tại điểm (X, Y) như sau:
� �2����1 + �3cos(�1 + �2) ] [ ] = [ ���� � 1 + �3 sin(�1 + � � 2) 2
3. Động học nghịch
Động học nghịch của robot nhằm tìm các góc khớp θ1 và θ2 dựa trên vị trí X và Y của đầu
công cụ. Bằng cách sử dụng định lý Pythagoras, ta có phương trình để tính θ2:
X2 + Y2 = �2 + �2 + 2L2L3cosθ2 Suy ra: 2 3
θ2= ���−1 �2 + �2− �2−2 �2 3 2�2�3 hoặc θ2
(�2 + �3)2 − (�2 + �2)
= ±2atan2 √ (�2 + �2) − (�2− �3)2
Sau khi tính θ2, góc θ1 có thể được tính bằng công thức: θ � �3����2 1 = atan2 − atan2 � �2+�3����2
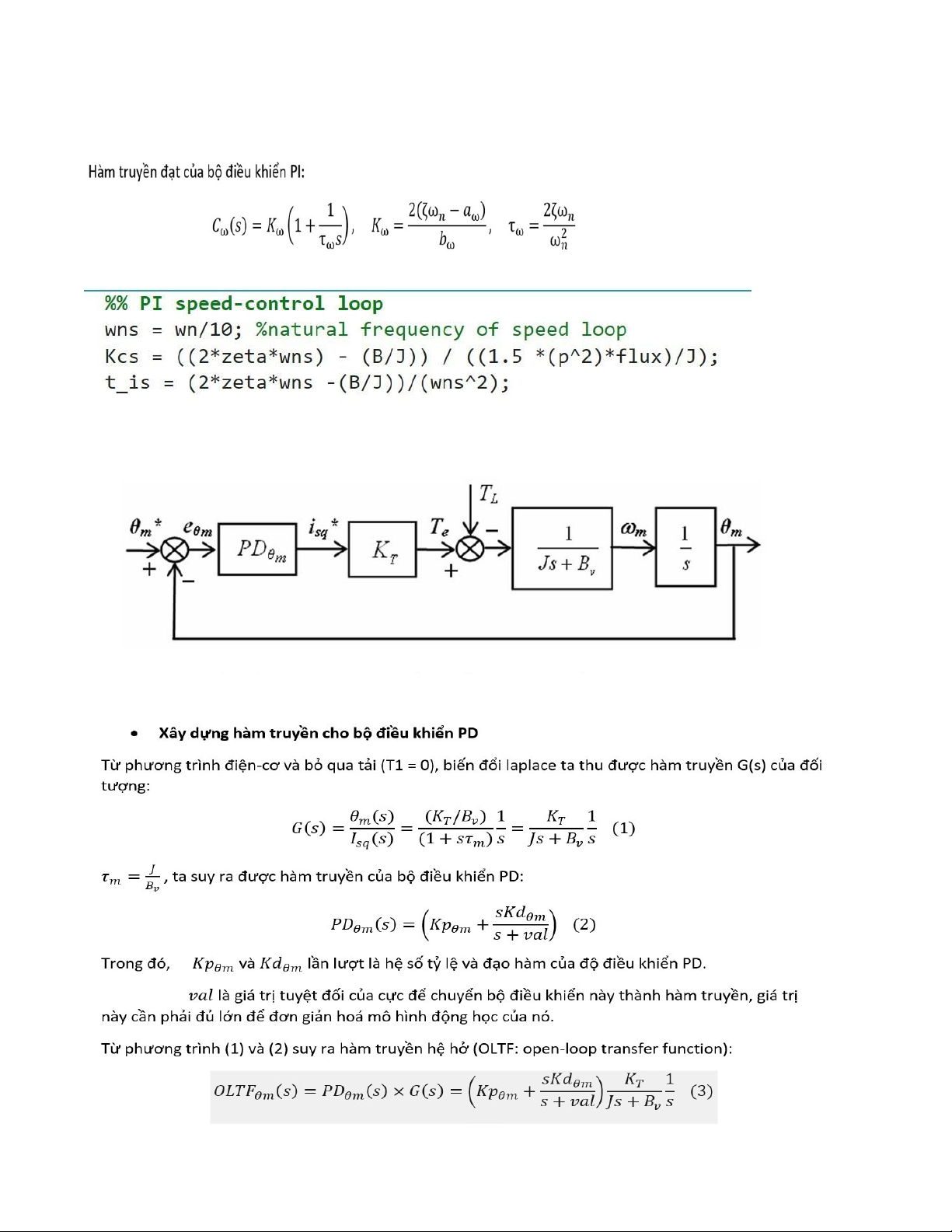
IV. Thiết kế hệ truyền động điện điều khiển vị trí cho động cơ PMSM:
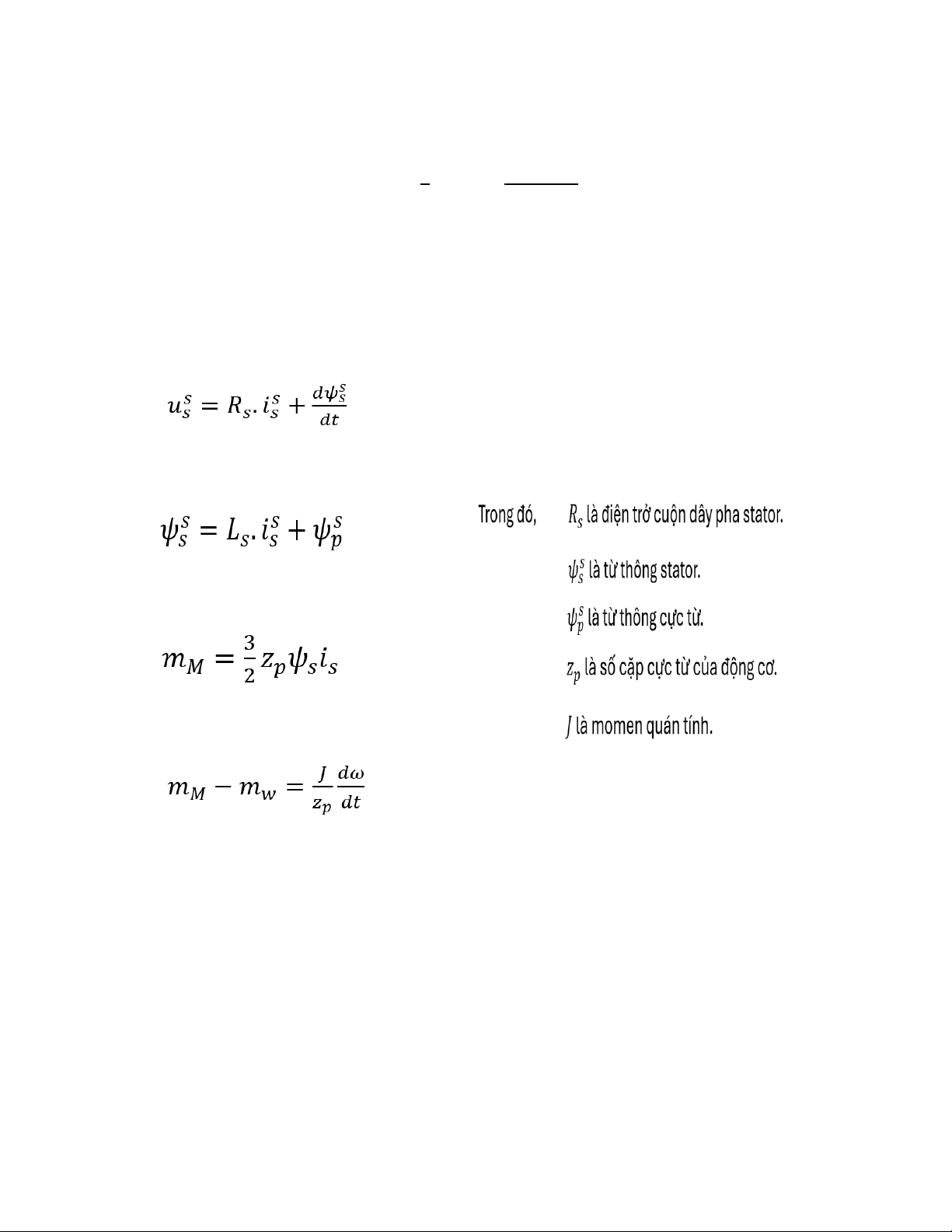
1. Mô tả toán học động cơ PMSM
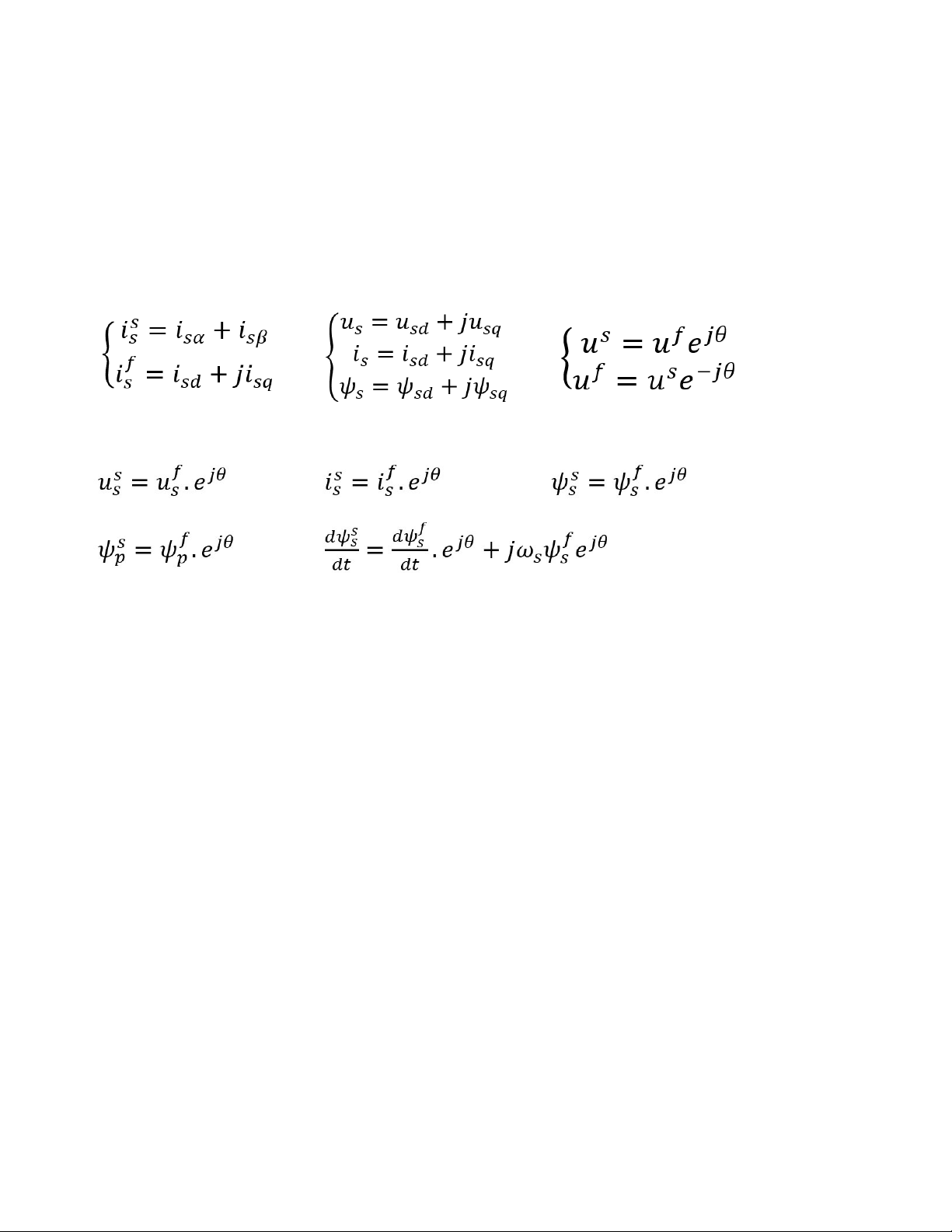
Phương trình điện áp stator
Phương trình từ thông
Phương trình momen quay:
Phương trình chuyển động:
Quy ước: Chỉ số viết bên phải trên cao: s chỉ hệ toạ độ alpha-beta và f chỉ hệ toạ độ từ thông dq.
Mô hình toán học PMSM trên không gian vector
1) Các Phương Trình cơ bản
• Chuyển đổi các đại lượng giữa hệ toạ độ dq và hệ toạ độ cố định với stator alpha-beta
• Sử dụng công thức chuyển đổi • Ta suy ra được
• Quy ước: Chỉ số viết bên phải trên cao: s chỉ hệ toạ độ alpha-beta và f chỉ hệ toạ độ từ thông dq.
• Thay các đại lượng trên vào các phương trình ban đầu, ta có các phương trình mới ở hệ toạ độ dq như sau:
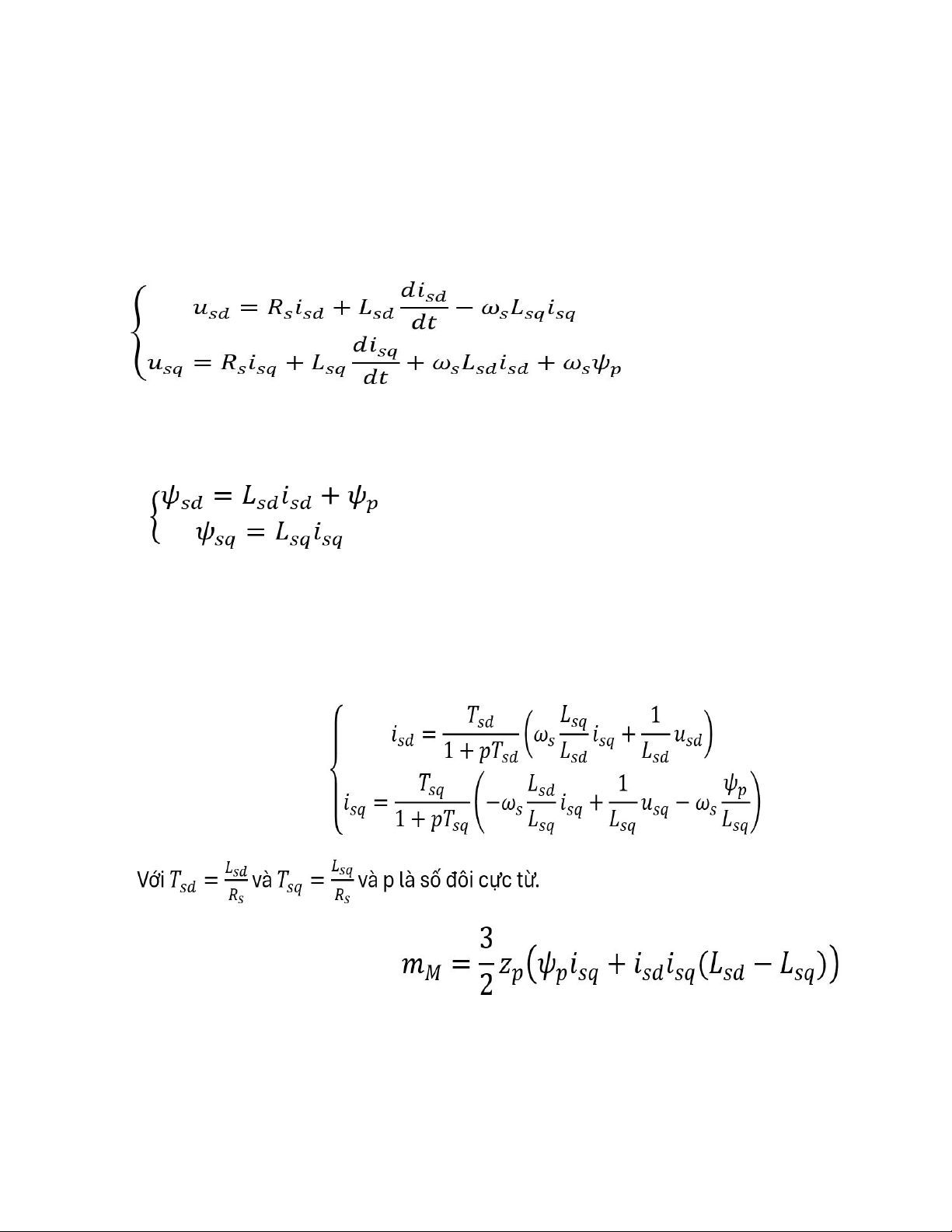
- Phương trình điện áp stator: -Phương trình từ thông:
• Quy ước: Chỉ số viết bên phải trên cao: s chỉ hệ toạ độ alpha-beta và f chỉ hệ toạ độ từ thông dq.
Thay các đại lượng trên vào các phương trình ban đầu, ta có các phương trình mới ở hệ toạ độ dq như sau:
• Phương trình momen điện từ:
2. Phương pháp điều khiển, thuật toán điều khiển vị trí
Nhóm lựa chọn thuật toán điều khiển:
• PID cho mạch vòng dòng điện và mạch vòng tóc độ
• PID cho mạch vòng vị trí
• Vì bộ điều khiển PID chỉ dành cho đối tượng có các mô hình toán học là hệ 1 chiều, nên nhóm sử dụng
phương pháp FOC (field-oriented control) cho động cơ PMSM, nhằm chuyển các đại lượng dòng điện, điện
áp về trục tọa độ 1 chiều (d,q)
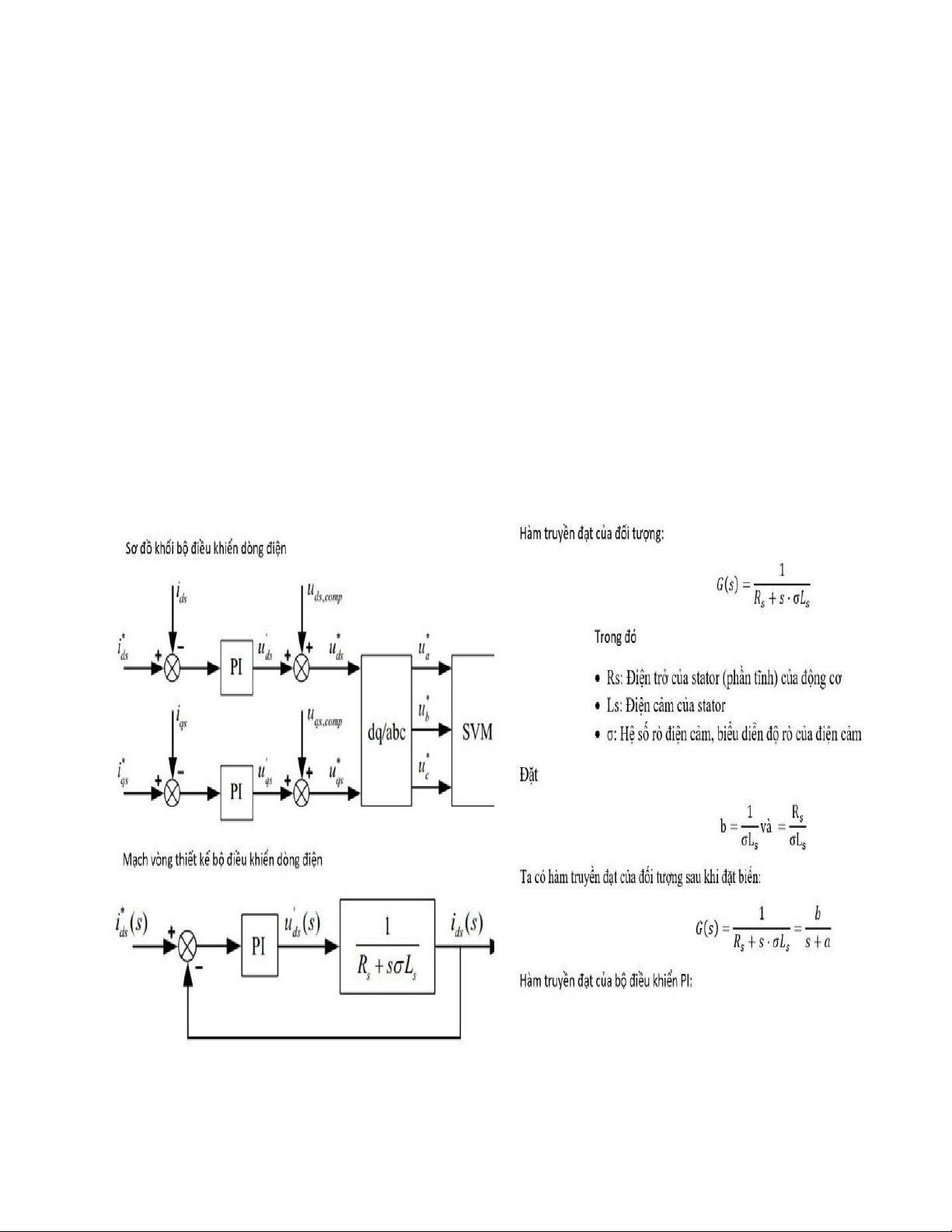
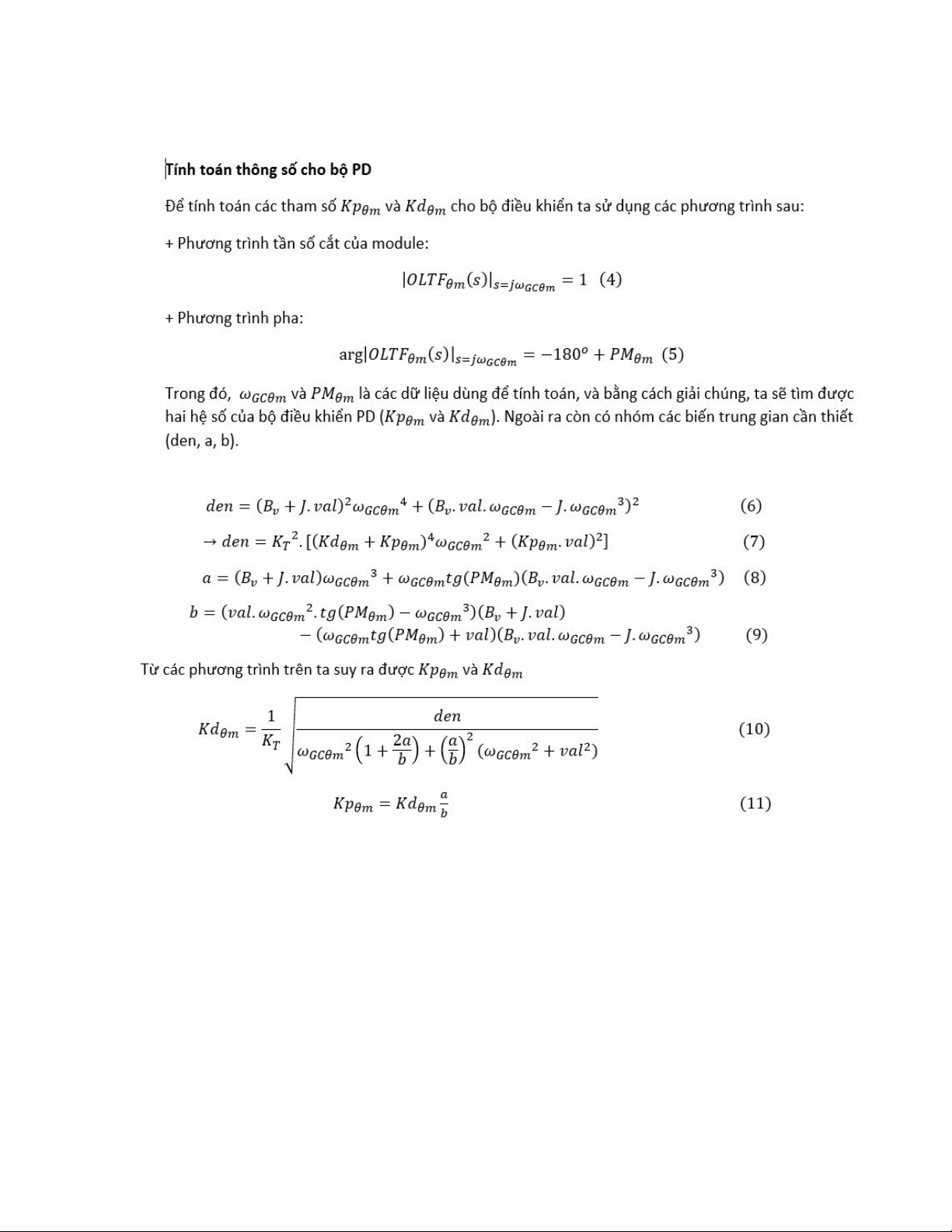
3. Thiết kế bộ điều khiển
a. Bộ điều khiển dòng điện
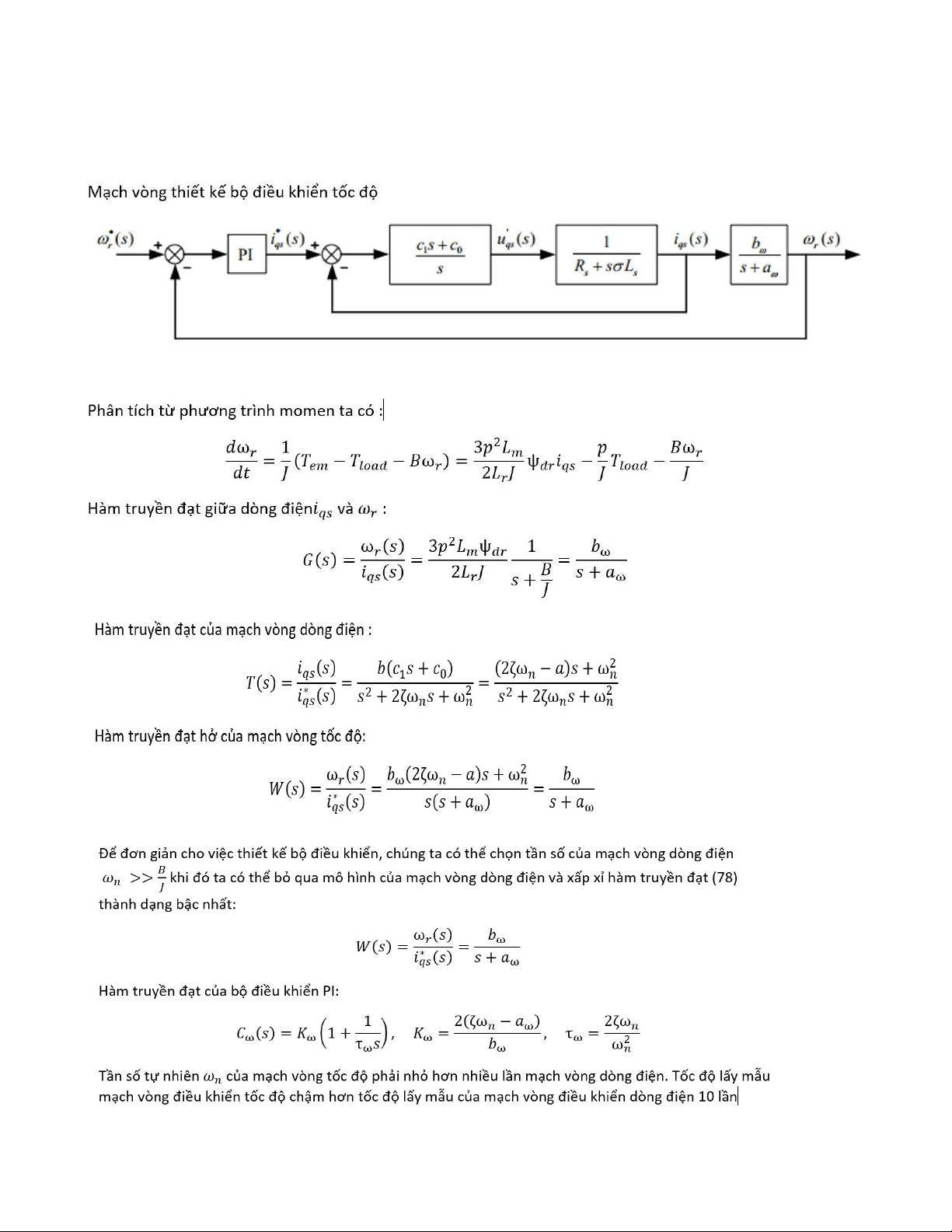
b. Bộ điều khiển tốc độ
c. Bộ điều khiển vị trí Hình 4.1
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32