Đề Cương Ôn Tập CK Đo Lường Và Cảm Biến | Trường Đại học Bách Khoa - Đại học Đà Nẵng
Quá trình đo và định nghĩa phương pháp đo. Đề Cương Ôn Tập CK Đo Lường Và Cảm Biến | Trường Đại học Bách Khoa - Đại học Đà Nẵng. Tài liệu sưu tầm gồm 30 trang, giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Kỹ thuật đo lường 33 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:













Preview text:
lOMoARcPSD| 60380256
ĐỀ CƯƠNG ÔN TẬP CK ĐO LƯỜNG VÀ CẢM BIẾN
CHƯƠNG 1: CÁC KHÁI NIỆM CƠ BẢN
1. Quá trình đo và định nghĩa phương pháp đo: a) Quá trình đo: X
- Quá trình đo là quá trình xác định tỉ số Ax= X0
+ Trong đó : X là đại lượng đo
Ax là độ lớn của một đại lượng đo cụ thể
X0 là giá trị tham chiếu chuẩn
b) Định nghĩa phương pháp đo :
- Gồm có 2 phường pháp đo:
+ Phương pháp đo biến đổi thẳng:
+ Phương pháp đo so sánh :
2. Các đơn vị đo SI và các đơn vị đó dẫn xuất: a) Các đơn vị đo SI:
- Gồm 7 đại lượng vật lý cơ bản ứng với 7 đơn vị đo cơ bản lOMoARcPSD| 60380256
b) Các đơn vị dẫn xuất:
- Được biểu thị theo dạng đại số dưới dạng các đơn vị cơ sở hoặc các
đơn vị dẫn xuất khác. Đại lượng đo Tên Kí hiệu Diện tích Mét vuông m2 Thể tích Mét khối m3 Tốc độ, vận tốc Mét trên giây m/s Gia tốc Mét trên giây bình m/s2 phương Số sóng Mét đối ứng m−1 Khối lượng riêng Ki-lô-gam trên mét kg/m3 vuông Thể tích riêng Mét khối trên ki-lô- m3/kg gam Cường độ của từ Ampere trên mét A/m trường Mật độ dòng điện Ampere trên mét A/m2 vuông Độ chói sáng Candela trên mét cd/m2 vuông Nồng độ mol, nồng Mole trên mét khối mol/m3 độ chất
- Đơn vị dẫn xuất liên kết SI có tên và ký hiệu đặc biệt: Đại lượng Tên đặc biệt Ký hiệu Biểu thức Biểu thức đo đặc biệt theo đơn theo cơ sở SI lOMoARcPSD| 60380256 vị SI khác Góc radian rad 1 m/m Góc khối steradian sr 1 m2/m2 Tần số Hertz Hz s−1 Lực, trọng newton N kg.m.s−2 lượng
3. Các đặc trưng của kỹ thuật đo:
- Đại lượng cần đo là thông số đặc trung cho đại lượng vật lý cần đo
+ Theo bản chất đại lượng đo gồm: Đại lượng đo điện •
Đại lượng đo năng lượng •
Đại lường đo không điện •
Đại lượng đo thông số •
Đại lượng đo phụ thược vào thời gian + Theo tính chất
thay đổi của đại lượng đo gồm: •
Đại lường đọ tiền định •
Đại lượng đo ngẫu nhiên
+ Theo cách biến đổi đại lượng đo gồm: •
Đại lượng đo biên tục ( đại lượng đo tương tự - analog) •
Đại lượng đo rời rạc ( đại lượng đo số - digital)
4. Phân biệt thiệt bị mẫu và chuẩn, quá trình truyền chuẩn:
a) Phân biệt thiệt bị mẫu và chuẩn:
- Mẫu : là dụng cụ dùng để kiểm tra chuẩn hóa các dụng cụ đó khác + Pin mẫu + Nguồn ổn áp mẫu + Điện trở mẫu
- Chuẩn : là các đơn vị đo tiêu chuẩn như chuẩn chiều dài, chuẩn khối
lượng, chuẩn điện áp…
b) Quá trình truyền chuẩn: lOMoARcPSD| 60380256
CHƯƠNG 2: SAI SỐ VÀ XỬ LÝ KẾT QUẢ ĐO 1.
2. Nguyên nhân và phương pháp loại trừ sai số: a) Nguyên nhân:
- Có nhiều nguyên nhân gây nên sai số, nhưng chủ yếu là các nguyên nhân sau:
• Do máy móc và dụng cụ đo thiếu chính xác, thiếu tinh vi
• Do người đo với trình độ tay nghề chưa cao, khả năng các giác quan bị hạn chế
• Do điều kiện ngoại cảnh bên ngoài tác động tới, như thời tiết
thay đổi, mưa gió, nóng lạnh bất thường,…
b) Phương pháp loại trừ sai số:
- Loại bỏ những kết quả đo không thực tế ( sai lếch quá lớn hơn 10%)
- Loại trừ sai số hệ thống
+ Phân tích lý thuyết, kiểm tra dụng cụ đo, chuẩn đo
+ Chỉnh về “0” trước khi đo
+ Chỉnh định theo đặc tuyến
+ Bù ngược dấu hoặc bù hiệu chỉnh
- Loại trừ sai số ngẫu nhiên
+ Gồm : kỳ vọng toán mx( giá trị trung bình )
+ Độ lệch bình quân , phương sai D =σ2
+ Phân bố xác suất: hàm mật độ phân bố xác suất chuẩn - Gia công kết quả đo
c) Tính toán sai số ( tương đối và tuyệt đối ) - Sai số tương đối:
Trong đó: ∆ X là sai số tuyệt đối
X là giá trị đo hoặc tính toán lOMoARcPSD| 60380256 X ctr là
giá trị tham chiếu hoặc giá trị chuẩn
Trong đó : γx là sai số tương đối ( thường tính ra đáp số %)
∆ Xlà sai số tương đối
X ctr là giá trị tham chiếu hoặc giá trị chuẩn
X là giá trị đo hoặc tính toán
d) Xử lý kết quả đo để xác định độ bất định
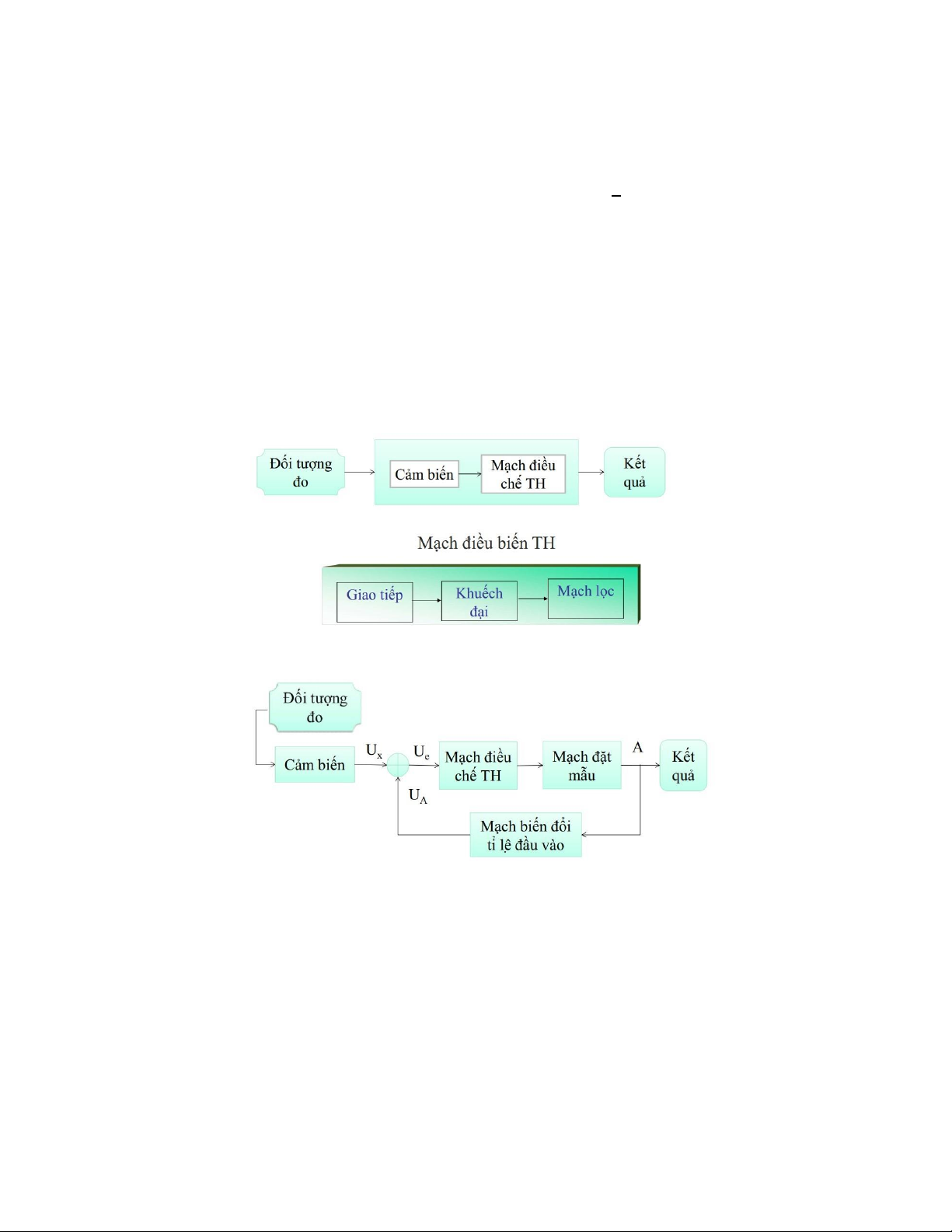
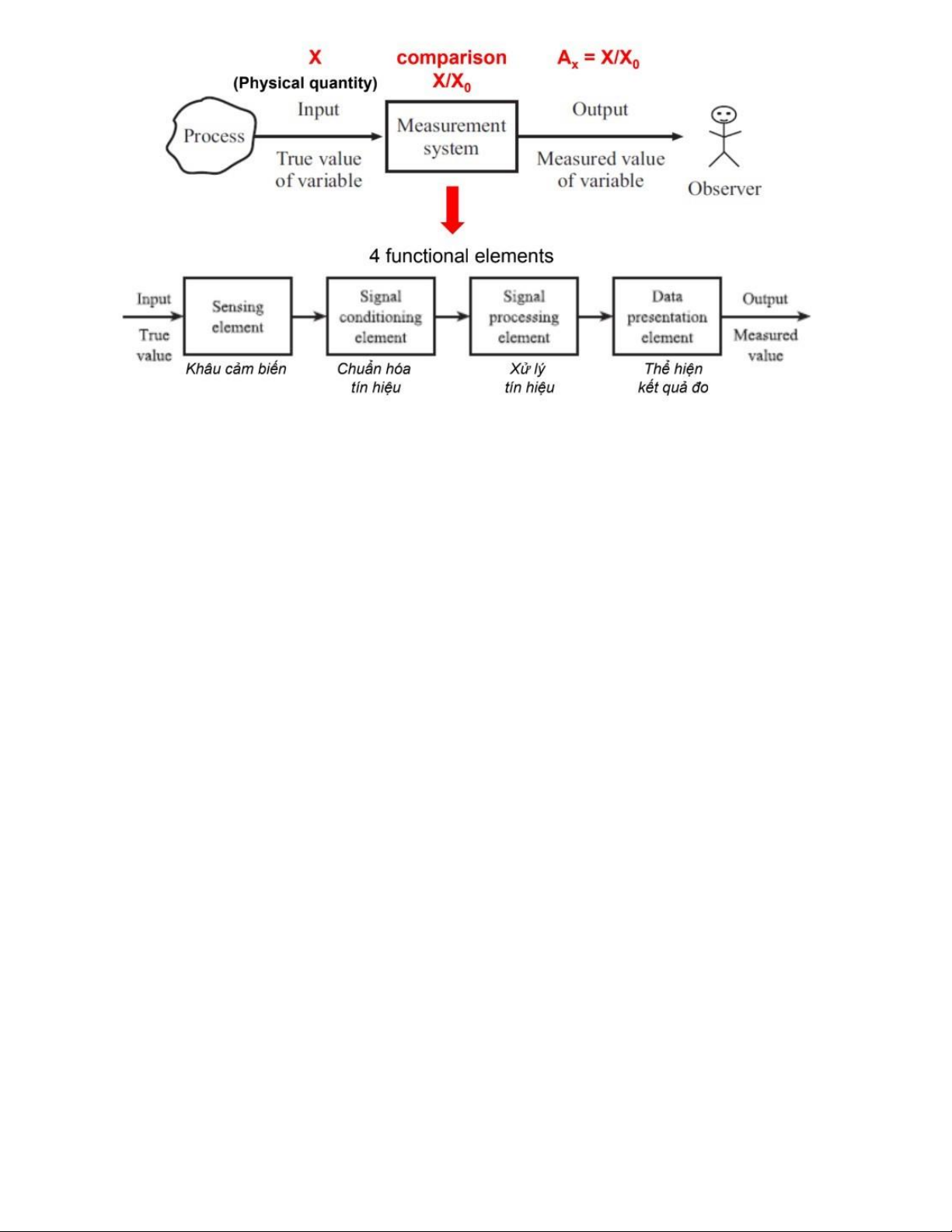
CHƯƠNG 3: SƠ ĐỒ CẤU TRÚC CỦA THIẾT BỊ ĐO. 1. Cấu trúc chung lOMoARcPSD| 60380256
2. Vai trò của từng khâu và đặc điểm tín hiệu ra sau mỗi khâu a) Khâu cảm biến - Vai trò
+ Tiếp tục với đối tường/ quá trình
+ Cung cấp đâu ra phụ thuộc vào đại lượng đo như ( Nhiệt kế thủy ngân, cặp nhiệt điện)
- Đặc điểm tín hiệu ra
+ Chủ động: Điện áp (V), dòng điện (A)
+ Thụ động: Điện trở (Ω), điện dung (F), độ tự cảm (H) b) Chuẩn hóa tín hiệu
- Chuyển đổi đầu ra của thành phần cảm biến thành một dạng phù
hợp hơn, thường ở dạng điện
+ Cầu lệch: chuyển đổi các thay đổi trở kháng thành các thay đổi điện áp
+ Bộ khuếch đại: khuếch đại milivôn thành vôn, miliampe thành ampe
+ Bộ dao động: chuyển đổi các thay đổi trở kháng thành điện áp tần số thay đổi c) Xử lý tín hiệu:
- Xử lý tín hiệu tương tự - Xử lý tín hiệu số:
• Bộ chuyển đổi tương tự sang số (ADC) tới máy tính, bộ vi xử lý(μP), DSP
• Máy tính, μP, DSP: tính toán giá trị của các biến được đo
• Kết hợp các giá trị từ nhiều cảm biến để tính toán một số lượng cấp cao hơn lOMoARcPSD| 60380256
d) Thể hiện kết quả đo
- Hiển thị : analog (kim, máy ghi, máy hiện sóng) hoặc kỹ thuật số (LED, LCD) - Ghi lại : băng từ,
- Truyền: dòng điện (4-20 mA), giao thức truyền thông (RS232/RS485, Fieldbus...)
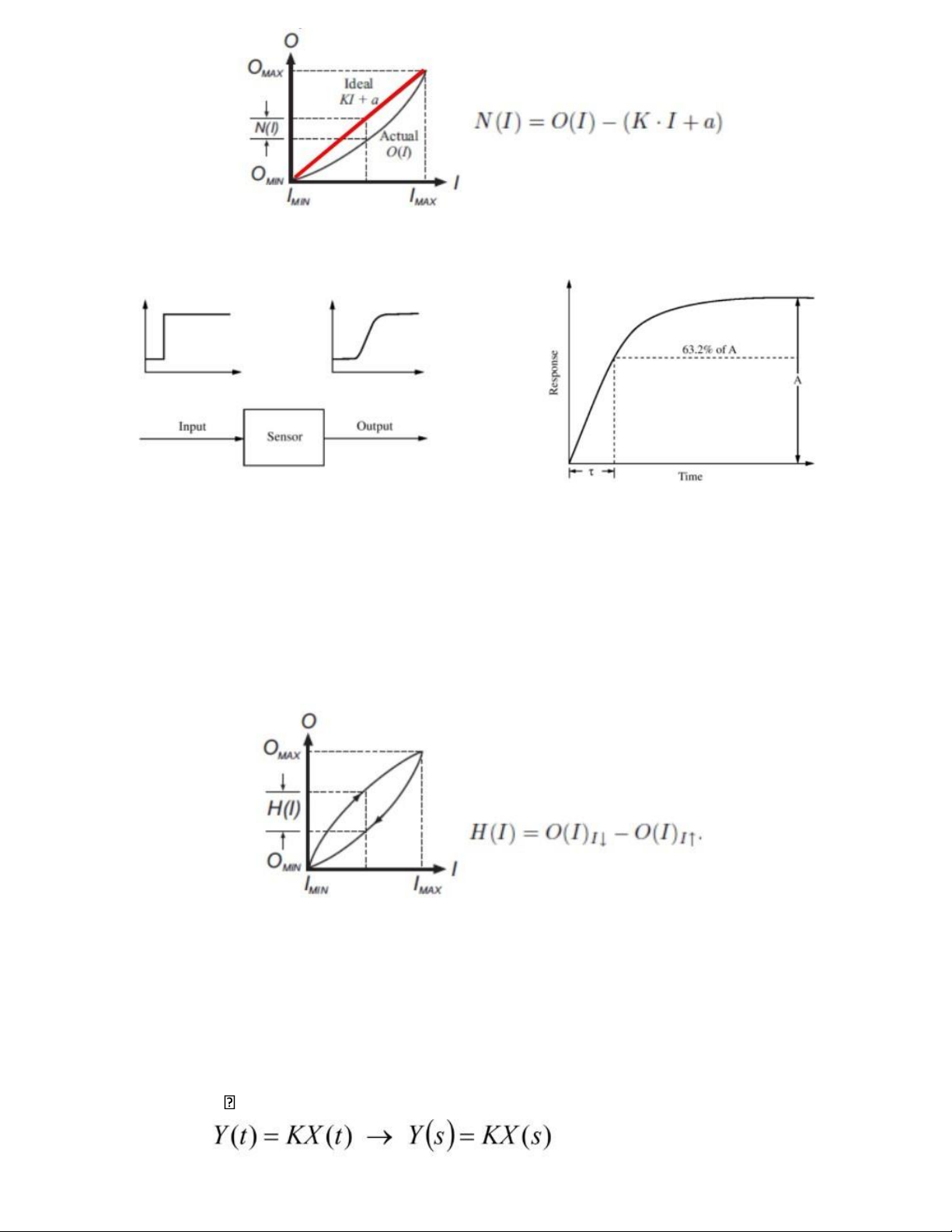
3. Các đặc tính tĩnh, đặc tính động của các hệ thống bậc 0,1,2: a) Các đặc tính tĩnh
- Độ chính xác : thường được biểu thị là chính xác trong phạm vi phần
x trăm của phép đọc/ khoảng:
Giá trị thực nằm trong phạm vi ±1% phần trăm của phép do/
khoảng cách của thiết bị
+ Ví dụ: một bộ chuyển đổi nhiệt độ có sai số ±1% giá trị đọc cho biết
100℃, khi đó nhiệt độ thực nằm trong khoảng 99℃ - 101℃
- Độ tin cậy – lặp lại: mức độ gần gũi mà một đại lượng có thể đo được
có thể được đo lặp lại
Được định nghĩa là phép đo biến thiên tối đa trong dữ liệu được đo
cho một giá trị đầu vào cụ thể
Được cho bởi độ lệch chuẩn
- Độ phân giải : sự thay đổi nhỏ nhất trong lượng đo được gây ra sự
thay đổi có thể phát hiện được trong đầu ra của nó.
+ Ví dụ: một bộ chuyển đổi nhiệt độ, nếu 0.2 ℃ là sự thay đổi nhiệt độ
nhỏ nhất được quan sát. -> sau đó độ phân giải đo lường là 0.2℃
- Độ nhạy : sự thay đổi trong đầu ra ∆Y theo một đơn vị thay đổi trong X
+ Độ dốc của đường cong hiệu chuẩn tĩnh được đánh giá ở giá trị đầu vào là độ nhạy tĩnh.
- Độ phi tuyến: Nếu mối quan hệ giữa đầu vào và đâu ra không tuân
theo phương trình đường thẳng lOMoARcPSD| 60380256 - Thời gian đáp ứng:
- Vùng chết: giá trị lớn nhất của biến đo được mà đầu ra của thiết bị
vẫn bằng không; xảy ra do các yếu tố như má sát tĩnh trong hệ thống đo lường cơ học.
- Sai số hồi sai: sự khác biệt giữa các phần ứng với chuỗi đầu vào tăng dần và giảm dần
+ Xảy ra do độ trễ của bánh răng do cơ cấu, trễ từ tính hoặc do trễ đàn hồi
- Lệch không: Thành phần lỗi không đổi tồn tại trên toàn bộ phạm vị
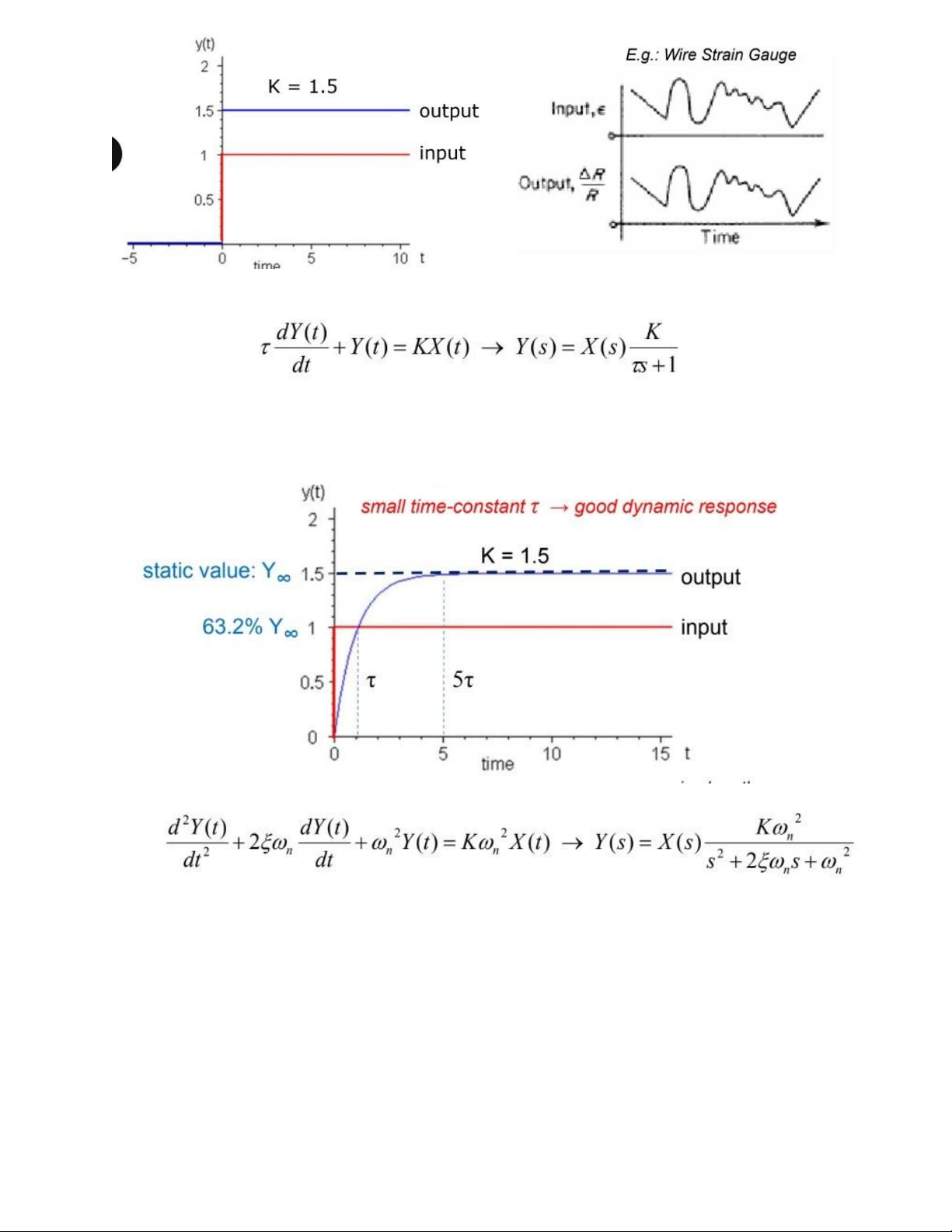
a) Đặc tính động của các hệ thống bậc 0,1,2 - Đáp ứng bậc 0
Trong đó: K là độ nhạy tĩnh
- Phản hồi đầu ra ngay lập tức cho đầu vào, không có thời gian trễ ( đáp ứng tức thì ) Phản hồi mong muốn: lOMoARcPSD| 60380256
- Đáp ứng bậc 1: là phương trình vi phân tuyến tính bậc nhất
τ – hằng số thời gian
+ Có độ trễ trong phản ứng đầu ra đối với sự thay đổi của đầu vào.
+ Khi hằng số thời gian τ → 0: tiếp cận với thiết bị bậc không.
- Đáp ứng bậc 2: phương trình vi phân tuyến tính bậc hai
+ωn - tần số tự nhiên
+ ξ – hệ số tắt dần:
• ξ > 1: y(t) tiến tới giá trị tĩnh ở tốc độ chậm, không vượt ngưỡng
• ξ = 1: tăng theo hàm mũ, phản ứng nhanh nhất, không vượt ngưỡng
• ξ = 0 : y(t) dao động ở tần số riêng, ωn
• 0 < ξ < 1 : y(t) dao động và tiến tới giá trị tĩnh từ từ
+ (giá trị ξ càng nhỏ, đ ộ vượt ngưỡng càng lớn) lOMoARcPSD| 60380256
+ Hệ số tắt dần tối ưu nhất : ξ = 0.69
• Đầu ra cách tiếp cận nhanh nhất trong vòng 5% giá trị tĩnh
• y(t) vượt quá giá trị tĩnh một chút trước khi đạt đến giá trị cuối cùng của nó lOMoARcPSD| 60380256
CHƯƠNG 4: CHUYỂN ĐỔI ĐO LƯỜNG VÀ CẢM BIẾN
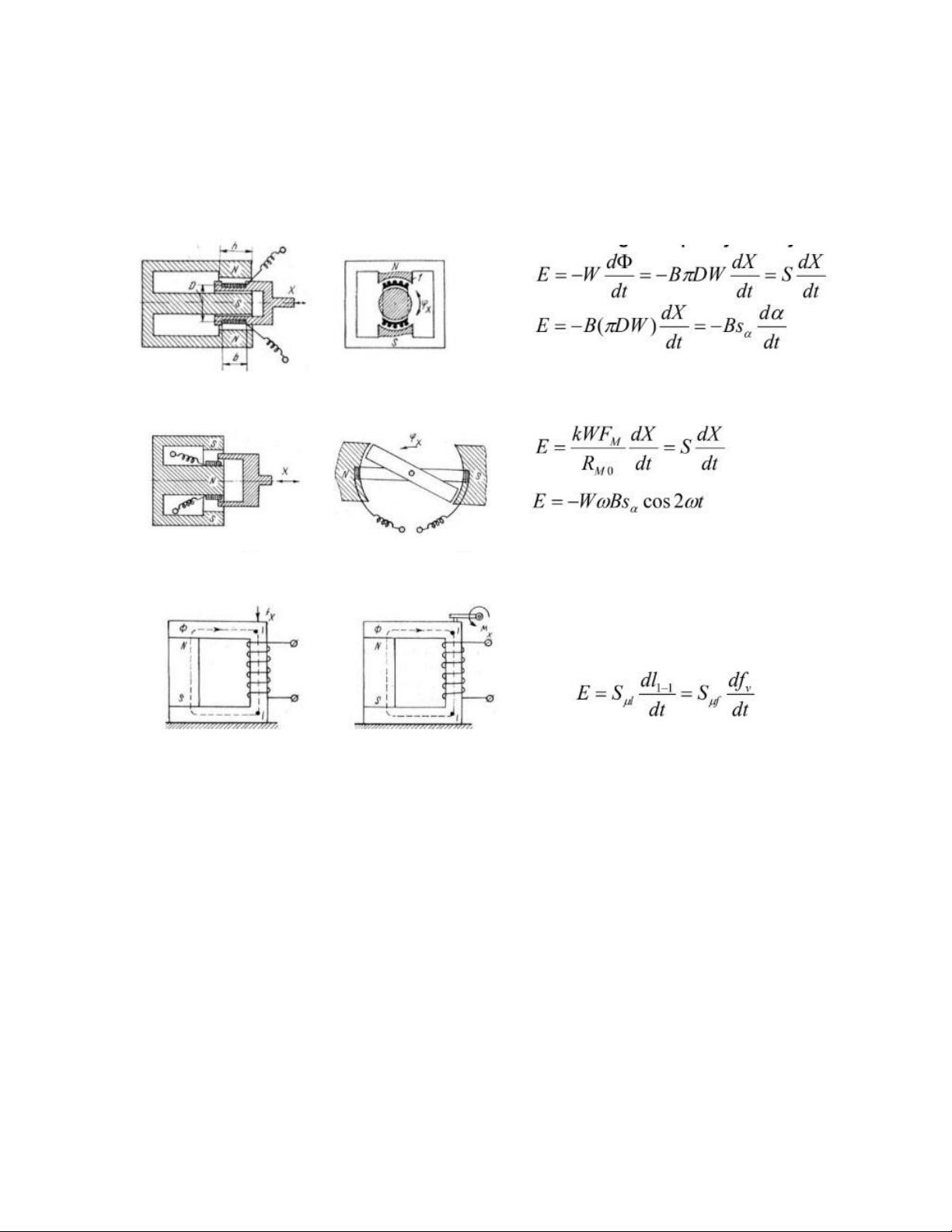
1. Chuyển đổi cảm ứng
a) Cấu tạo : nam châm vĩnh cửu/ nam châm điện + cuộn dây
b) Nguyên lý hoạt động : đại lường đo X tác động lên CĐ -> cuộn dây di
chuyển -> từ thông ∅/ vị trí lõi thép thay đổi -> từ trở Rμ thay đổi Phân loại:
+ CĐ cảm ứng có cuộn day di chuyển ( thẳng/ xoay)
+ CĐ cảm ứng có lõi sắt từ di chuyển ( thẳng/ xoay)
+ CĐ cảm ứng có lõi sắt từ bị biến dạng ( thằng/ xoay)
c) Phương trình đặc tính : E = f(X)
d) Các đặc tính cơ bản và ứng dụng - Các đặc tính cơ bản
• CĐ có cuộn dây di chuyển: đặc tính tuyến tính, độ chính xác cao (0,2% ÷ 0,5%)
• CĐ có lõi thép di chuyển: đặc tính phi tuyến và từ trễ nên chỉ
được sử dụng trong các mạch điều tần/điều pha
• Cần chú ý đến sai số do tần số thay đổi - Ứng dụng
• CĐ cảm ứng có cuộn dây di chuyển: đo tốc độ/mômen quay, tốc độ kế
• CĐ có lõi thép di chuyển: đo di chuyển thẳng/góc, đo biên độ rung (0,01 mm ÷ vài mm) lOMoARcPSD| 60380256
• Độ nhạy cao của CĐ cho phép đo được các di chuyển nhỏ, đo
tốc độ, gia tốc và các đại lượng khác với dải tần số đến 15 ÷ 30kHz
2. Chuyển đổi tĩnh điện
a) Cấu tạo và nguyên lý hoạt động: đại lượng đo đầu vào làm thay
đổi điện dung của chuyển đổi
Chuyển đổi áp điện
- Cấu tạo và nguyên lý hoạt động: dựa trên hiệu ứng áp điện (thuận):
lực cơ học F tác động lên vật liệu -> xuất hiện điện tích q trên bề mặt
Vật liệu: tinh thể thạch anh (SiO2), muối barium titanate (BaTiO3), Tourmaline...
Cấu trúc tinh thể bất đối xứng: Thạch anh: 3 trục chính:
+ Trục điện X: hiệu ứng áp điện dọc
+ Trục cơ Y: hiệu ứng áp điện ngang
+ Trục quang Z: không xảy ra hiệu ứng áp điện Trong đó :
- Phương trình đặt tính : q = f(X)
- Các đặc tính cơ bản và ứng dụng + Đặc tính cơ bản
• Thạch anh (tự nhiên hoặc tổng hợp): vật liệu phổ biến nhất cho CĐAĐ: lOMoARcPSD| 60380256
• Hằng số áp điện: d = 2,110 12 C/N; phụ thuộc nhiệt
độ: + T = 200 0C: hằng số áp điện không thay đổi
+ T = 200 0C ÷ 500 0C: hằng số áp điện thay đổi đáng kể
+ T > 537 0C: tính chất áp điện bị phá hủy
• Hằng số điện môi: ε = 39,810 12 F/m
• Ứng suất cho phép: σ = 101 ÷ 102 N/mm2
• ρ = 1016 Ω/m, phụ thuộc nhiều vào nhiệt độ và các trục + Ứng dụng
• đo lực biến thiên (đến 103 N) • đo áp suất 102 N/mm2
• đo gia tốc (tới 103 g) trong dải tần từ 0,5 ÷ 100kHz
• cảm biến siêu âm (ultrasonic transducer) trong chẩn đoán y học
• cảm biến lưu lượng siêu âm
+ Ưu điểm: cấu trúc đơn giản, kích thước nhỏ, độ tin cậy
cao, có khả năng đo các đại lượng biến thiên nhanh + Nhược
điểm: không (rất khó) đo được lực tĩnh (do hiện
tượng rò điện tích), khó khắc độ
Chuyển đổi điện dung
- Cấu tạo và nguyên lý hoặt động : đại lượng và làm dịch chuyển các
điện cực của tự điện làm cho điện dung tụ điện tay đổi
• CĐ đơn, bản cực di chuyển ngang lOMoARcPSD| 60380256
- Phương trình đặc tính : C = f(X)
- Đặc tính cơ bản và ứng dụng + Đặc tính
• Đặc tính tuyến tính với CĐ đơn có tiết diện bản cực (A) thay
đổi, phi tuyến với CĐ đơn có khoảng cách giữa các bản cực (d) thay đổi
• (∆A/A, ∆d/d) ~ 0,1525÷ 0,2 đối với CĐ đơn; ~ 0,4 với CĐ vi sai
• Khoảng cách giữa các bản cực giới hạn bởi dmin (để tránh
điện áp đánh thủng cách điện)
• Có lực hút giữa hai bản cực khi có điện áp đặt vào, bị khử khi CĐ mắc kiểu vi sai
• Độ nhạy của CĐ giảm khi tính đến điện dung kí sinh ở dây nối
và bản thân cấu trúc của CĐ + Ứng dụng
• CĐ điện dung có khe hở không khí thay đổi: đo di chuyển nhỏ (từ vài μm ÷ vài mm)
• CĐĐD trong mạch cung cấp điện áp một chiều: đo tốc độ, độ
dịch chuyển, biến thiên của các đại lượng có thể biến đổi
thành di chuyển (lực, áp suất, gia tốc).
• CĐ điện dung có diện tích bản cực thay đổi: đo các di chuyển
lớn (>1cm), đo di chuyển góc (đến 2700)
• CĐ có điện môi thay đổi: đo độ ẩm (vải, chất dẻo), đo mức
nước, chiều dày của các vật cách điện, đo lực
• CĐ có tổn hao điện môi thay đổi (mạch đo dùng đo góc tổn
hao tgδ của tụ trong mạch xoay chiều): xác định các tham số
vật lý của vật liệu đặt giữa hai bản cực...
3. Chuyển đổi cặp nhiệt điện:
a) Cấu tạo và nguyễn lý hoạt động: dựa trên hiệu ứng nhiệt điện ( hiệu
ứng Seebeck): điện áp ra của CĐ cặp nhiệt điện tỉ lệ với nhiệt độ
b) Phương trình đặt trưng : V = f(T) lOMoARcPSD| 60380256
c) Các đặc tính cơ bản
- Phương trình đặc tính gần đúng của CNĐ: V=AT +BT2+CT3 4.
- Dựa trên hiệu ứng ten-zô: khi dây dẫn chịu biến dạng -> R thay đổi -
Điện trở dây dẫn thay đổi khi chịu biến dang.
b) Phương trình đặc trưng: R = f(X)
c) Đặc tính cơ bản và ứng dụng - Đặc tính cơ bản
+ Sai số phụ: có rất nhiều nguyên nhân:
• Sai số do biến dạng dư của keo dán khi sấy khô
• Sai số do sự giãn nở khác nhau giữa CĐ và chi tiết dán...
-> phải có công nghệ dán chuẩn + chọn vị trí chính xác
• Sai số do sự giãn nở nhiệt của bản thân CĐ gây ra ứng suất lOMoARcPSD| 60380256
• Sai số do điện trở của CĐ, của các mối nối và dây nối do nhiệt độ
- Các cảm biến ứng suất được gắn lên bề mặt bằng keo chuyên dụng,
loại keo được sử dụng phụ thuộc vào tuổi thọ yêu cầu của hệ thống đo:
• Đo ngắn hạn (tối đa vài tuần): sử dụng keo cyano-acrylic.
• Lắp đặt lâu dài: sử dụng keo epoxy kết hợp với quá trình gia
nhiệt ở nhiệt độ (~80-100 °C)
• Chuẩn bị bề mặt: làm nhẵn bề mặt (ví dụ: bằng giấy nhám rất mịn)
-> Khử dầu bằng dung môi -> Loại bỏ các dấu vết của dung môi
-> Cảm biến ứng suất phải được dán ngay lập tức sau đó để
tránh quá trình oxy hóa hoặc làm bẩn bề mặt đã chuẩn bị - Ứng dụng
• đo lực, áp suất, mômen quay, gia tốc và các đại lượng khác nếu
có thể biến đổi thành biến dạng đàn hồi với ứng suất cực tiểu
lớn hơn hoặc bằng độ nhạy của CĐ (≈107 ÷ 2.107 N)
• Có thể đo các đại lượng biến thiên tới vài chục kHz
5. Chuyển đổi nhiệt điện trở
a) CĐ nhiệt điện trở kim loại
- Cấu tạo và nguyên lý hoạt động :
+ Điện trở của dây kim loại thay đổi theo nhiệt độ
• Đường kính dây : D = 0.02 ÷ 0.06mm
• Chiều dài dây : L = 5 ÷ 20mm
- Phương trình đặc trưng: R=f(T)
- Đặc tính cơ bản và ứng dụng
+ Đặc tính cơ bản: dải nhiệt độ làm việc rộng, đáp ứng nhanh
• NĐT đồng: dải nhiệt độ làm việc: -50℃ ÷ 180℃
+ T = 0℃ ÷ 100℃ ; RT = R0(1+αT); R0= 100Ω; α= 4,3x10−31/℃
• NĐT platin: nhiệt độ làm việc
+ Dải đo 0 ÷ 660℃ : RT= R0(1+AT+BT2)
+ Dải đo -180℃ ÷ 0℃ : RT= R0[1+ AT+ BT2 +C (T−100 )3]
đặc tính phi tuyến, RT = f(T) dạng bảng
+ Nhược điểm: đặc tính phi tuyến, không dùng được trong môi trường ôxi hóa khử lOMoARcPSD| 60380256
+ Ưu điểm: độ bền hóa học cao, có thể chế tạo thành sợi rất
mỏng: sử dụng rộng rãi
• NĐT Niken: nhiệt độ làm việc T max300℃
+ Dải đo T = 0℃ ÷ 100℃: RT = R0(1+αT); α= 5x10−31/℃
+ Ưu điểm: ρ >> -> CĐ kích thước nhỏ • Đường đặc tính + Ứng dụng
b) CĐ nhiệt điện trở bán dẫn
- Cấu tạo và nguyên lý hoạt động: điện trở của chất bán dẫn thay đổi theo nhiệt độ
+ chất bán dẫn: ô-xit kim loại ( gốm-ceramic): CuO, CoO, MnO…
- Phương trình đặc trưng: R=f(T)
- Các đặc tính cơ bản và ứng dụng
+ Các đặc tính cơ bản: dải nhiệt độ làm việc hẹp, độ chính xác cao
Đường đặc tính phi tuyến: RT 5kΩ tại 25℃ Xấp xỉ Steinhart-Hart: [a,b,c là hằng số Steinhart-Hart]
+ Hệ số nhiệt độ âm và phụ thuộc vào nhiệt độ:
α=−β/T2≈ - 0,02 ÷ -0,08 1/℃
α( bán dẫn) >> α(kim loại)
+ Độ chính xác và tốc độ đáp cao hơn RTD
+ Dải làm việc hép ( -90℃ ÷ 130℃ )
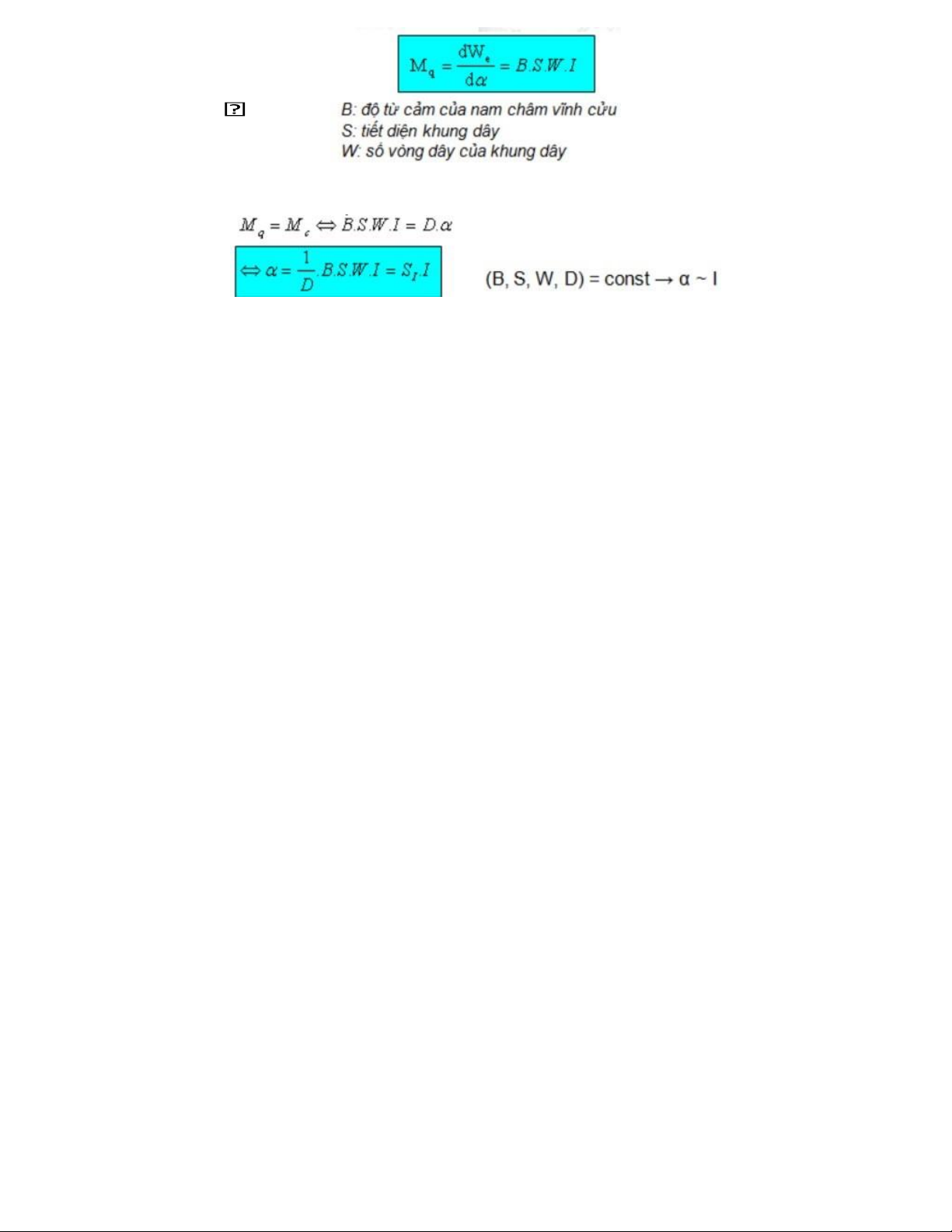
CHƯƠNG 5: CƠ CẤU CHỈ THỊ 1. Cơ cấu từ điện
a) Cấu tạo và nguyên lý hoạt động
- Cấu tạo : gồm 2 phần cơ bản phần tĩnh + phần động
+ Phần tĩnh: gồm: NCVC; mạch từ + cực từ và lõi sắt -> mạch từ kín
• Giữa cực từ và lõi sắt: khe hở làm việc, giữa đặt khung quay chuyển động.
+ Phần động: khung dây quay quấn bằng dây đồng. Khung dây được
gắn vào trục quay( hoặc dây căng, dây treo)
• Trên trục quay có hai lò xo cản mặc ngược nhau, kim chỉ thị và thang đo.
- Nguyên lý hoạt động: dòng điện I chạy qua khung dây( phần động)
tương tác với từ trường nam châm vĩnh cửu( phần tĩnh) -> sinh
mômen Mq -> khung dây quay góc α. lOMoARcPSD| 60380256
Tại vị trí cân bằng, mômen quay bằng mômen cản:
b) Các đặc tính cơ bản và ứng dụng - Các đặc tính cơ bản
+ Chỉ đo được dòng điện một chiều DC
+ Đặc tính của thang đo đều
+ Độ nhạy: SI= const
+ Ưu điểm: độ CX cao; ảnh hưởng của từ trường ngoài nhỏ; công
suất tiêu thụ bé nên ảnh hưởng không đáng kể đến chế độ của mạch
đo; độ cản dịu tốt; thang đo đều
+ Nhược điểm: chế tạo phức tạp; chịu quá tải kém; độ chính xác của
phép đo bị ảnh hưởng của nhiệt độ; chỉ IDC; dễ hư hỏng khi bị chấn động mạnh - Ứng dụng
+ Chế tạo các loại điện kế nhiều thang đo, dải đo rộng
+ Chế tạo các loại điện kế có độ nhạy cao 2. Cơ cấu điện từ
a) Cấu tạo và nguyên lý hoạt động:
- Cấu tạo : phần tĩnh + phần động
+ Phần tĩnh: cuộn dây 1 bên trong có khe hở không khí ( khe hở làm việc )
+ Phần động: lõi thép 2 được gắn lên trục quay 5, lõi thép có thể
quay tự do trong khe làm việc của cuộn dây; trục quay có gắn: bộ
phận cản dịu không khí 4, kim chỉ 6, đối trọng 7; lò xo cản 3, bảng khắc độ 8.
- Nguyên lý hoạt động : dòng điện I chạy vào cuộn dây 1 (phần tĩnh)
tạo thành một nam châm điện hút lõi thép 2 (phần động) vào khe hở
không khí -> mômen quay.
b) Các đặc tính cơ bản và ứng dụng - Các đặc tính cơ bản
+ Góc quay α I2-> không phụ thuộc vào chiều của dòng điện -> có thể
đo trong cả mạch AC hoặc DC
+ Thang đo không đều, có đặc tính phụ thuộc vào tỉ số dL/dα là một đại lượng phi tuyến. lOMoARcPSD| 60380256
+ Ưu điểm: cấu tạo đơn giản, tin cậy, chịu được quá tải lớn
+ Nhược điểm: độ chính xác không cao nhất là khi đo ở mạch DC sẽ
bị sai số ( do hiện tượng từ trễ, từ dư…); độ nhạy thấp; bị ảnh hưởng
của từ trường ngoài ( do từ trường của cơ cấu yếu khi dòng nhỏ) - Ứng dụng
+ Chế tạo ampemet, vonmet trong mạch xoay chiều tần số công nghiệp
3. Cơ cấu chỉ thị cảm ứng
a) Cấu tạo và nguyên lý hoạt động:
- Cấu tạo : phần tĩnh + Phần động
+ Phần tĩnh: các cuộn dây điện 2,3 ở dạng nam châm điện.
+ Phần động: đĩa kim loại 1 ( thường bằng nhôm) gắn vào trục 4 quay trên trụ 5
- Nguyên lý hoạt động: dựa trên sự tác động tương hỗ giữa từ trường
xoay chiều( tạo ra bởi dòng điện trong phần tĩnh) với dòng điện xoáy
tạo ra trong đĩa của phần động.
+ I1, I2 vào các cuộn dây phần tĩnh -> từ thông
∅1,∅2[Ψ (Φ1,Φ2)=Ψ (I1, I2) ]
+ ∅1,∅2<-> Ix1, Ix2-> lực F1, F2-> các mômen quay tương ứng -> quay đĩa nhôm
b) Các đặc tính cơ bản và ứng dụng - Các đặc tính cơ bản π
+ Mq đạt Mqmax nếuΨ (I1, I2)=2
+ Mq f I1, f I 2
+ Chỉ làm việc trong mạch AC
+ Nhược điểm: Mq f I1, f I 2 -> phải đổi định f I 1,f I 2 - Ứng dụng
+ Chủ yếu để chế tạo côngtơ đo năng lượng; có thể đo tần số….
4. Cơ cấu chỉ thị Led 7 đoạn
a) Cấu tạo và nguyên lý hoạt động
- Cấu tạo: Tinh thể lỏng là hợp chất hữu cơ có tính chất quang học.
Chúng được đặt thành lớp giữa các tấm kính với các điện cực trong
suốt kết hợp tủa ở mặt trong - Nguyên lý hoạt động:
+ Trạng thái bình thường: ô tinh thế lỏng trong suốt cho ánh sáng đi
qua -> thanh hiển thị tương ứng trùng với mặt phông lOMoARcPSD| 60380256
+ Khi được kích hoạt( bởi U AC hình sin hoặc xung vuông f = 50 ÷ 60Hz)
-> ô tinh thể lỏng phản xạ lại ánh sáng -> thanh hiển thị tương ứng sẽ nối trên mặt phông
+ Ưu điểm: dòng tiêu thụ nhỏ ( cỡ 80μA cho cả 7 thanh của hiển thị tinh thể lỏng) b) Ứng dụng
- Bảng hiệu điện từ, bảng tỷ số bóng đá, màn hình casio…
5. Cơ cấu chỉ thị tự ghi:
- Gồm 3 cơ cấu chỉ thị tự ghi có tốc độ thấp(f < 10Hz), trung bình (f < 100Hz), cao
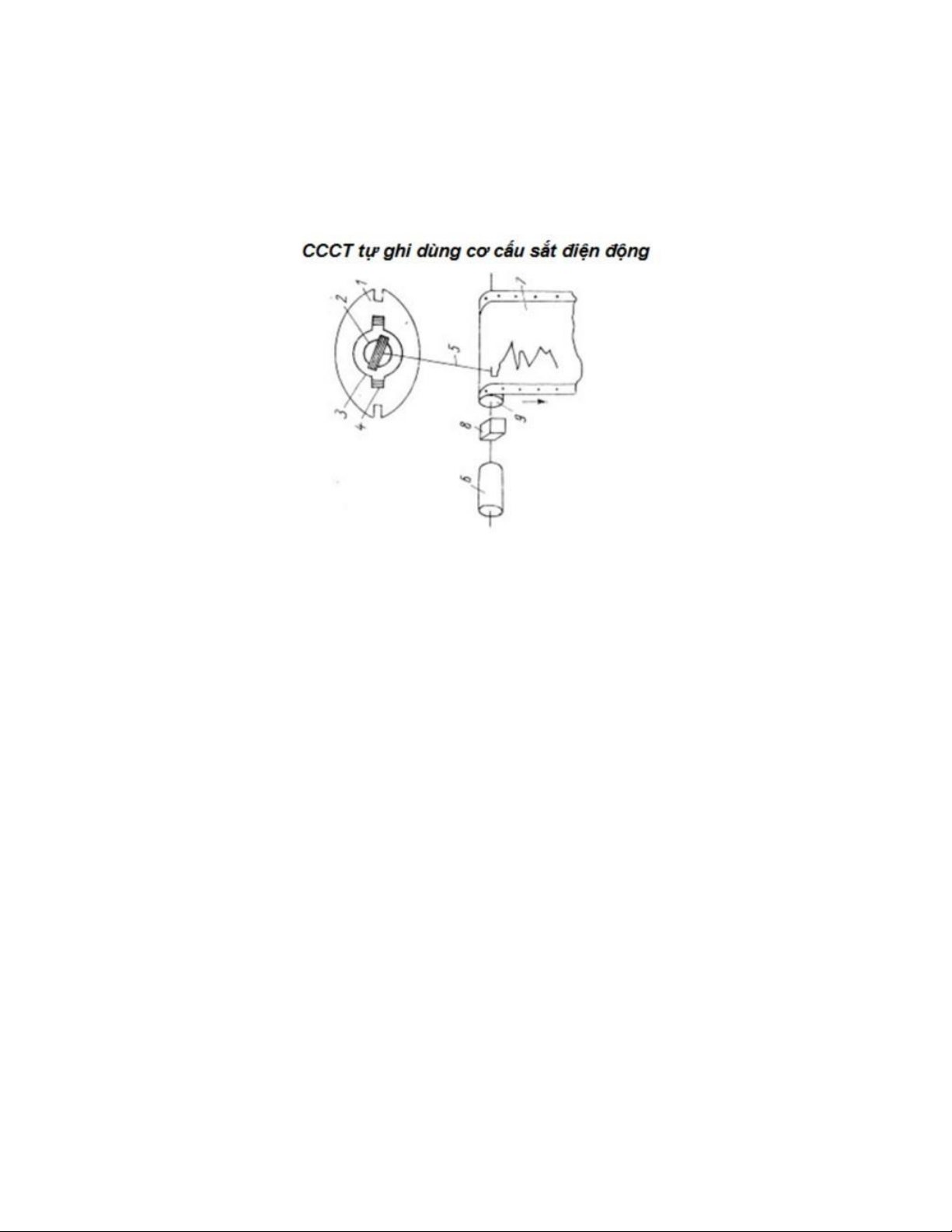
a) Cơ cấu chỉ thị ghi có tốc độ thấp ( f < 10Hz)
- Cấu tạo và nguyên lý hoạt động
+ Dùng cơ cấu sắt điện động hoặc cơ cấu điện từ có NCVC có kích
thước lớn và có vòng từ thép kín ( tạo Mq lớn) •
Phần 1: đo y = = f(i): là CCCT sắt điện động: phần tĩnh( mạch từ
1 với cuộn dây 4); phần động ( khung dây động 3 quấn quanh
lõi từ 2 gắn với kim 5 có gắn bút ghi)
• Phần 2: thể hiện x= K(t) : cơ cấu đồng hồ gồm động cơ bộ 6, bộ
giảm tốc 8, quả rulô 9, băng giấy 7
- Ứng dụng : ghi nhận nhiệt độ, độ ẩm, áp suất khí quyển; theo dõi tín
hiệu sinh học như nhịp tim, điện não đồ với tần số thấp…
b) Cơ cấu chỉ thị tự ghi có tốc độ trung bình (f < 100Hz) - Cấu tạo:
+ Phần 1: đo y = α = f(i): phần tĩnh: mạch từ 1 với cuộn dây 2 để đưa Ix
vào; phần động là lõi từ 3 gắn với lá mỏng đàn hồi 4, qua thanh
truyền động 5 nối với kim 6 có gắn bút ghi
+ Phần 2: đo x = K(t): băng giấy 7 quay quanh rulô truyền động bởi cơ cấu đồng hồ
- Nguyên lý hoạt động : Ix vào cuộn dây 2 -> từ trường -> hút lõi từ 3: ở
trạng thái cân bằng lực hút này cân bằng với lực đàn hồi của lá mỏng
4 -> dao động của Ix ghi trên băng giấy
- Đặc tính : độ nhay cỡ 0,2mm/mA, tần số riêng của phần động cỡ 70Hz.
- Ứng dụng: các thiết bị y tế: điện tâm đồ, điện não đồ…; thiết bị tự ghi trong CN.
c) Cơ cấu chỉ thị tự ghi có tốc độ cao: gồm dùng các CCCT cơ điện có tần
số dao động riêng cao; CCCT điện tử ( Oscilloscope, Oscillograph)
- Sử dụng các chỉ cơ cấu cơ điện có f dđ riêng cao ( f ≈750Hz )
Tài liệu liên quan:
-
Đề cương môn Kỹ thuật đo lường | Trường Đại học Bách khoa, Đại học Đà Nẵng
37 19 -

Đề cương môn kỹ thuật đo lường- Trường Đại học bách khoa - Đại học đà nẵng.
63 32 -

https://www.studocu.vn/vn/document/dai-hoc-dien-luc/dien-chuyen-nganh/ky-thuat-do-luong-da-chuyen-doi/19438979
56 28 -

Đề cương môn kỹ thuật đo lường- Trường Đại học bách khoa - Đại học đà nẵng.
62 31 -

Đề cương môn kỹ thuật đo lường- Trường Đại học bách khoa - Đại học đà nẵng.
66 33