Đề cương ôn tập môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
1. Một động cơ điện có đáp ứng tải như hình 1. Biết mômen quán tính có giá trị 0.001 kg.m2. Bỏ qua các tổn hao, tìm mômen điện từ của động cơ. Vẽ đồ thị của mômen điện từ động cơ (trục tung là mômen và trục hoành là thời gian)
Đề cương ôn tập môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
Tài liệu gồm 5 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:
Preview text:
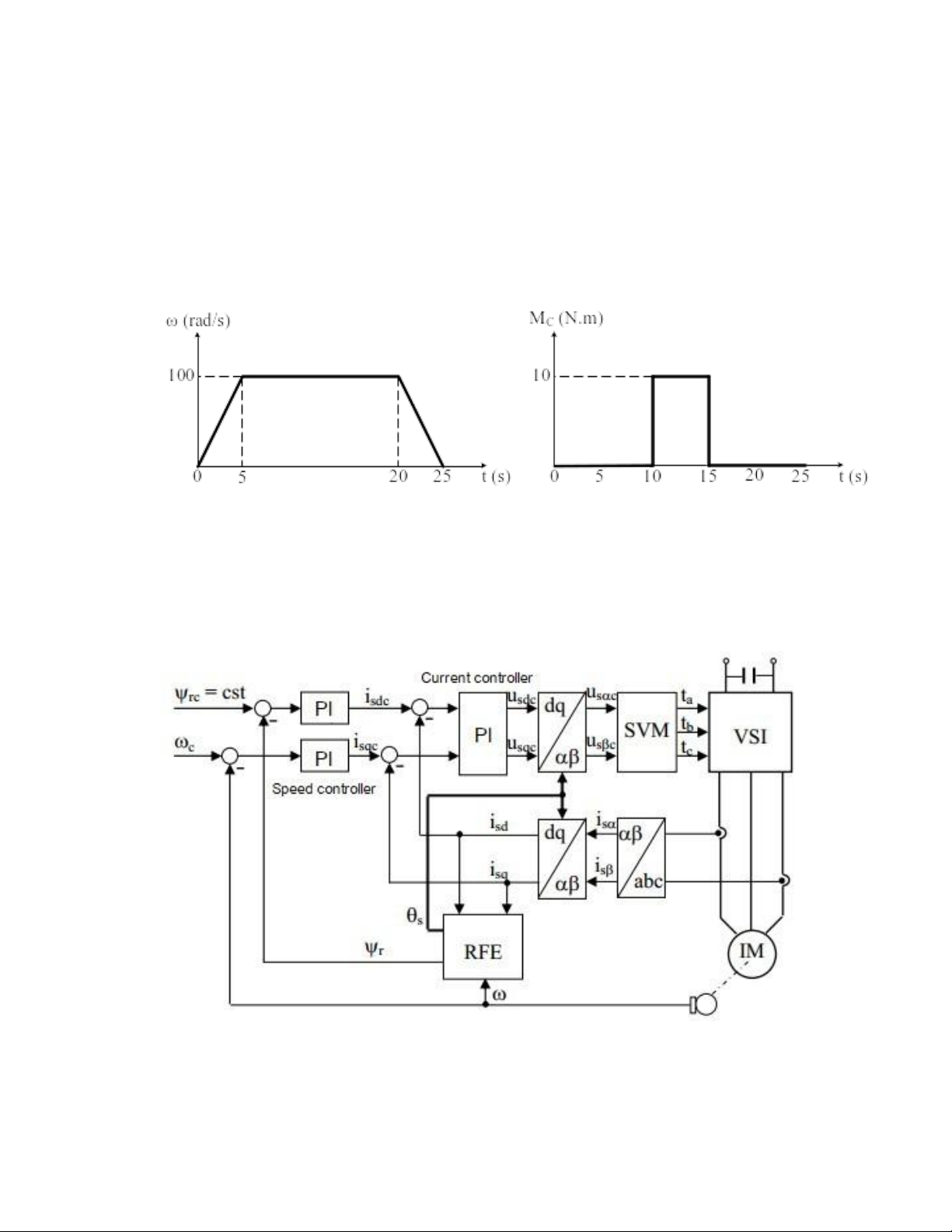
ÔN TẬP TRUYỀN ĐỘNG ĐIỆN 1.
Một động cơ điện có đáp ứng tải như hình 1. Biết mômen quán tính có giá
trị 0.001 kg.m2. Bỏ qua các tổn hao, tìm mômen điện từ của động cơ. Vẽ đồ thị
của mômen điện từ động cơ (trục tung là mômen và trục hoành là thời gian)
Hình a. Đáp ứng vận tốc
Hình b. Đáp ứng mômen tải 2.
Cho sơ đồ sơ đồ điều khiển hệ truyền động điện động cơ KĐB điều khiển
theo phương pháp tựa theo từ thông (FOC)
H 2.1 Cấu trúc hệ truyền động động cơ KĐB
Hãy phân tích nguyên lý và chức năng của các khối trong sơ đồ điều khiển của hệ truyền động H2.1 trên. 3.
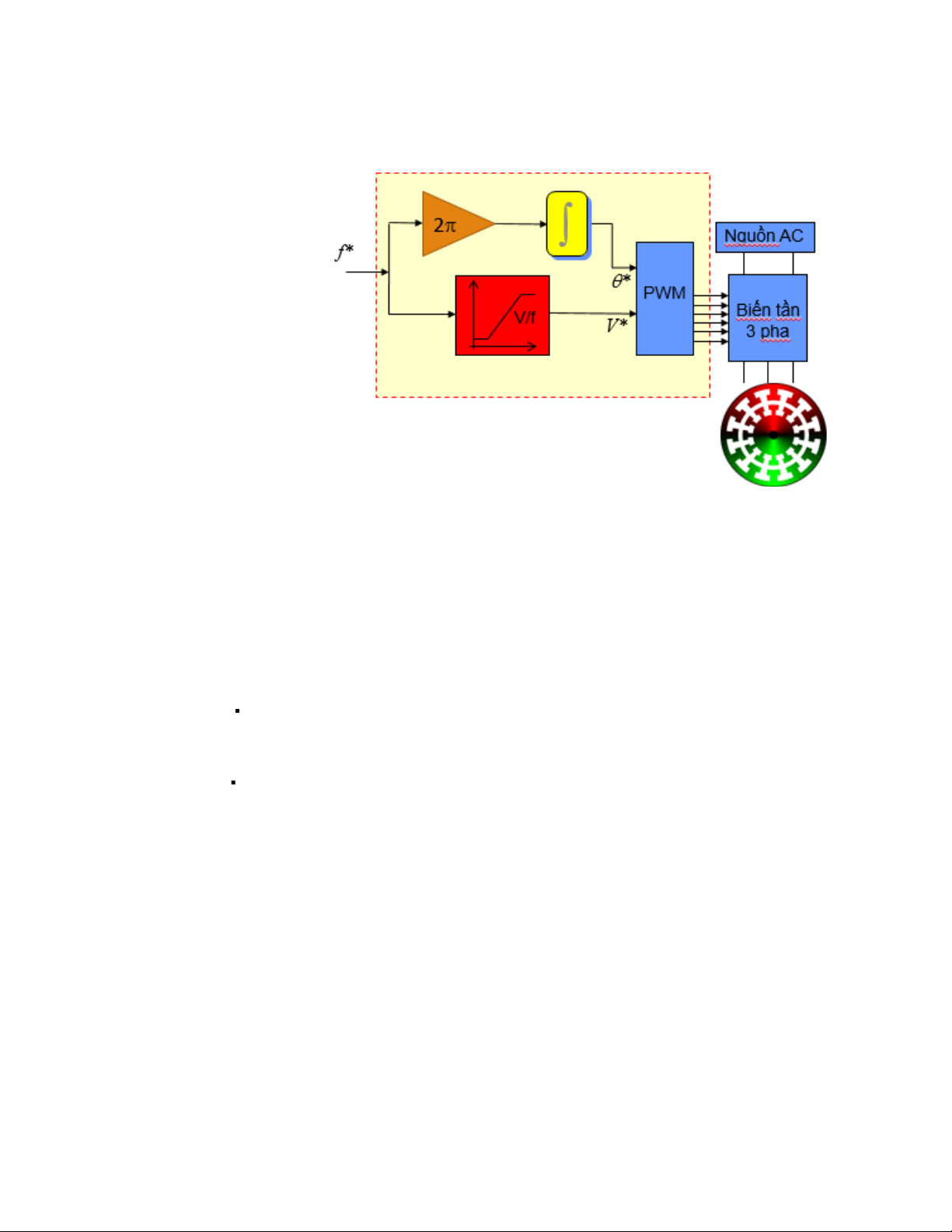
Phân tích sơ đồ sơ đồ điều khiển V/f động cơ không đồng bộ 3 pha rotor lồng sóc (Hình 3). Hình 3
4. Động cơ DC kích từ độc lập có Vđm = 230V, Idm = 90A, nđm = 500v/p,
Rư=0.115Ω, Lư=11mH, được cung cấp bởi một bộ chopper lớp E. Bộ
chopper được cung cấp từ nguồn V= 230VDC và tần số hoạt động của bộ chopper là f = 400Hz.
a. Tính , Khi động cơ làm việc ở góc phần tư thứ II, với M=Mđm và n = 300v/p
b. Tính , Khi động cơ làm việc ở góc phần tư thứ III, với M=1/2Mđm và n = 400v/p
( Giả thiết từ thông được giữ không đổi và bằng định mức trong suốt qúa trình điều khiển ).
5. Động cơ DC kích từ độc lập có Vđm = 230V, Idm = 90A, nđm = 500v/p,
Rư=0.115Ω được cung cấp bởi một bộ chopper kiểu đảo dòng(hoạt động ở
góc phần tư thứ I và II). Bộ chopper được cung cấp từ nguồn V= 230VDC
và tần số hoạt động của bộ chopper là f = 400Hz
a. Tính tốc độ của động cơ khi hoạt động ở chế độ động cơ với = 0.5và M=1/2Mđm.
b. Tính tốc độ của động cơ khi hoạt động ở chế độ hãm tái sinh với = 0.5và M=Mđm
6. Động cơ DC kích từ độc lập có Rư = 0,25 Ω , KΦ đm = 0.896 V.s/rad, cung cấp
từ một cầu chỉnh lưu 1 pha Điều khiển bán phần. Điện áp AC cung cấp cho cầu
chỉnh lưu có trị hiệu dụng 208 V, tần số 60 HZ. Giả thiết điện cảm trong mạch đủ
lớn để dòng phần ứng có thể coi là liên tục và phẳng. Kích từ không đổi và bằng
định mức. Bỏ qua tổn hao do ma sát và tổ hao không tải.
Động cơ làm việc với tải có M= 45Nm tại tốc độ n=1000v/ph. Tính:
a. Góc kích α cần thiết của bộ chỉnh lưu.
b. Hệ số công suất ngõ vào của bộ chỉnh lưu khi đó.
7. Động cơ DC kích từ độc lập có Rư = 0,25 Ω , KΦ đm = 3.1 V.s/rad, cung cấp từ
một cầu chỉnh lưu 1 pha Điều khiển toàn phần. Điện áp AC cung cấp cho cầu
chỉnh lưu có trị hiệu dụng 208 V, tần số 60 HZ. Giả thiết điện cảm trong mạch đủ
lớn để dòng phần ứng có thể coi là liên tục và phẳng.
Kích từ không đổi và bằng định mức.
Bỏ qua tổn hao do ma sát và tổ hao không tải.
Nếu dòng động cơ là Iư = 45 A, góc kích α = 600, Tính:
a. Momen trên trục của động cơ.
b. Tốc độ của động cơ.
c. Hệ số cộng suất trung ngõ vào bộ chỉnh lưu.
8. Động cơ DC kích từ độc lập có Vđm = 200V, Idm = 80A, nđm = 450 vòng/ phút, Rư=0.115Ω
được cung cấp bởi một bộ chopper lớp C (kiểu đảo dòng). Bộ chopper được cung cấp từ nguồn
V= 200VDC và tần số hoạt động của bộ chopper là f = 400Hz
c. Cho biết các góc phần tư hoạt động của động cơ trong hệ Chopper-Động cơ DC trên
d. Tính , Khi động cơ làm việc ở các góc phần tư đó, với M=1/2Mđm và n = 300v/p
(Giả thiết từ thông được giữ không đổi và bằng định mức trong suốt qúa trình điều khiển).
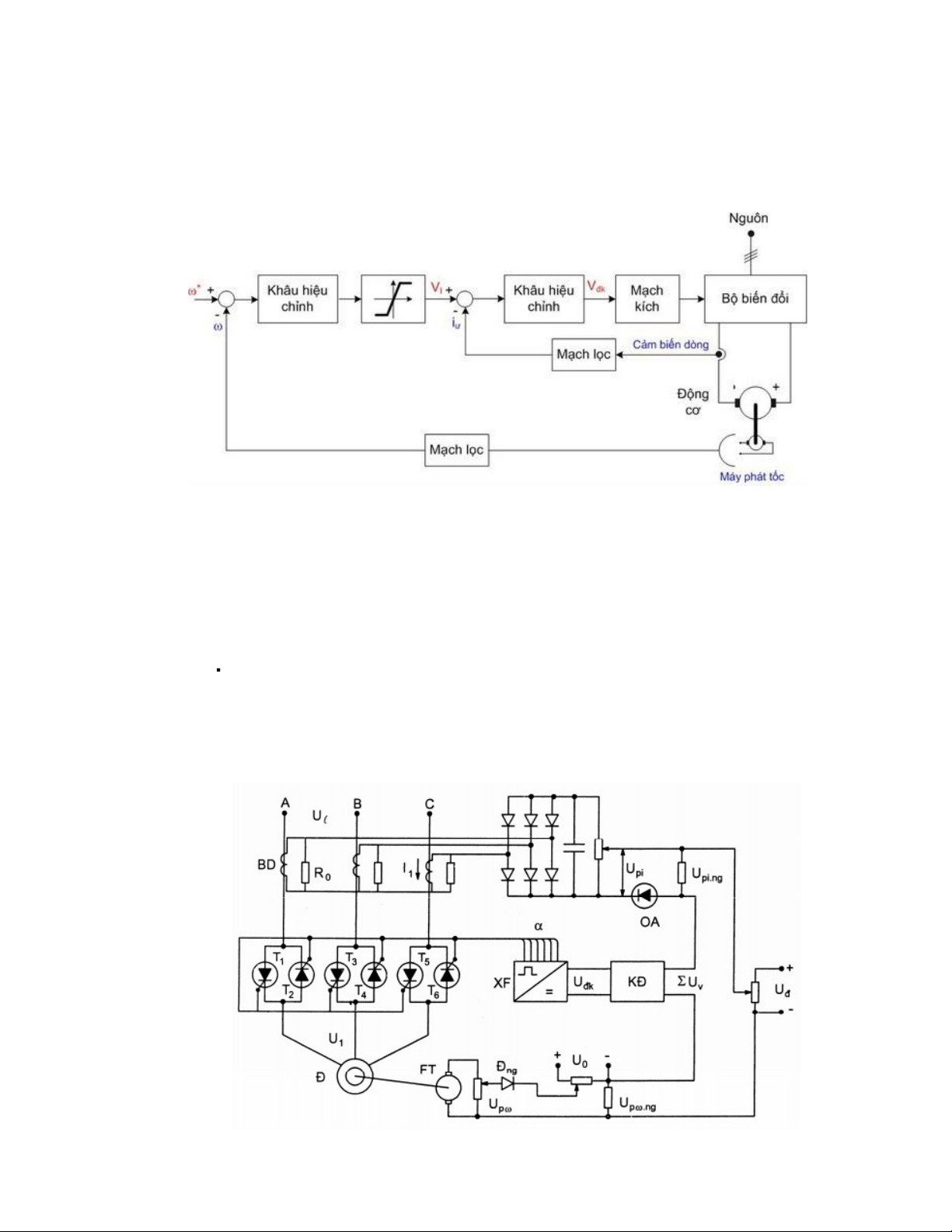
9. Cho sơ đồ hệ thống điều khiển vòng kín Bộ chỉnh lưu - Động cơ DC ( H2.1) a.
Phân tích sơ đồ hệ điều khiển b.
Xây dựng lưu đồ giải thuật thực thi bộ điều khiển ( H.4)
Hình 4. Sơ đồ hệ thống điều khiển vòng kín Bộ chỉnh lưu - Động cơ DC
10. Động cơ DC kích từ độc lập có Vđm = 230V, Idm = 90A, nđm = 500v/p, Rư=0.115Ω, được cung
cấp bởi một bộ chopper lớp E. Bộ chopper được cung cấp từ nguồn V= 230VDC và tần số hoạt động
của bộ chopper là f = 400Hz.
a. Cho biết các góc phần tư có thể hoạt động của động cơ trong hệ Chopper – ĐCDC trên.
b. Tính , Khi động cơ làm việc ở các góc phần tư đó, với M = Mđm và n = 300v/p
( Giả thiết từ thông được giữ không đổi và bằng định mức trong suốt qúa trình điều khiển ).
11. Cho sơ đồ hệ truyền động điều khiển động cơ KĐB như hình H.5
Hình 5. Sơ đồ điều khiển của hệ truyền động AC
Hãy phân tích nguyên lý và chức năng của các khối trong sơ đồ điều khiển của hệ truyền động Hình 5 trên.
12. Động cơ DC kích từ độc lập có Vđm = 230V, Idm = 70A, nđm = 550v/p, Rư=0.115Ω, được
cung cấp bởi một bộ chopper lớp E. Bộ chopper được cung cấp từ nguồn V= 230VDC và tần
số hoạt động của bộ chopper là f = 400Hz.
a. Cho biết các góc phần tư có thể hoạt động của động cơ
b. Tính , Khi động cơ làm việc ở các góc phần tư đó, với M=1/2 Mđm và n = 250v/p
( Giả thiết từ thông được giữ không đổi và bằng định mức trong suốt qúa trình điều khiển ).
13. Động cơ DC kích từ độc lập có Rư = 0,25 Ω , KΦđm = 3.1 V.s/rad, Udm=200 V, Mdm = 42 A.
a. Vẽ đặc tính cơ tự nhiên của động cơ trên
b. Từ dạng đặc tính cơ tự nhiên vẽ dạng các họ đặc tính cơ nhân tạo của động cơ khi đưa
thêm điện trở vào mạch phần ứng của động cơ ( điều chỉnh tăng điện trở R1 < R2 < R3)
c. Nhận xét họ cơ nhân tạo của động cơ khi đưa thêm điện trở.
14. Cho động cơ DC kích từ độc lập có các tham số Rư = 0,25 Ω , KΦ đm = 3.1 V.s/rad, Udm=200 V, Mdm = 42 A.
a. Vẽ đặc tính cơ tự nhiên của động cơ trên
b. Từ dạng đặc tính cơ tự nhiên vẽ dạng các họ đặc tính cơ nhân tạo của động cơ khi thay
đổi điện áp phần ứng của động cơ ( điều chỉnh giảm áp U3 < U2 < U1)
c. Nhận xét họ cơ nhân tạo của động cơ khi thay đổi điện áp phần ứng của động cơ.
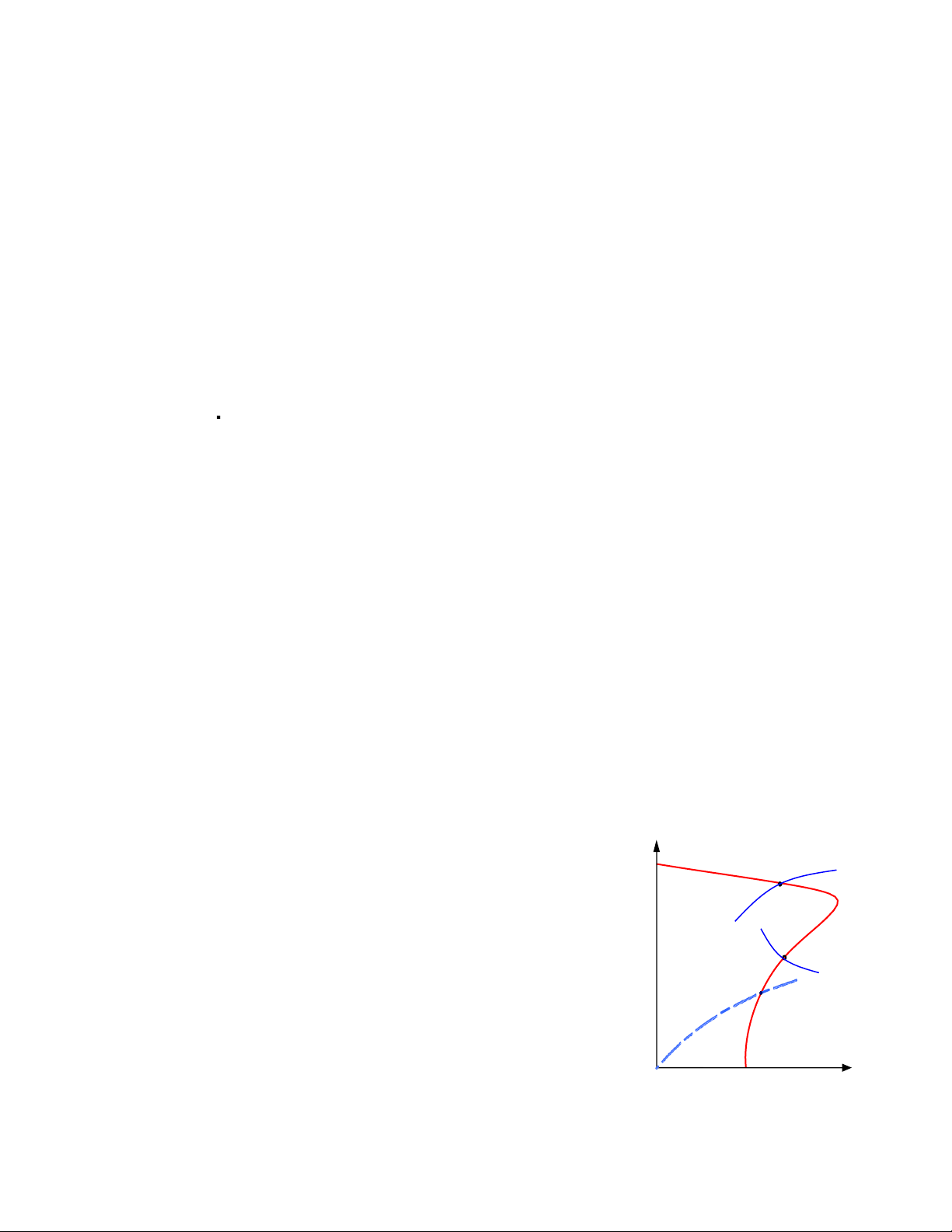
15. Tìm các điểm làm việc ổn định trong số các điểm làm việc xác lập- các điểm cắt hình bên (Điểm A, B, C) ω A Mc1 B Mc3 C Mc2 M M
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32