Đồ án Thiết kế hệ thống kho hàng tự động môn Thiết kế hệ thống cơ điện tử | Trường Đại học Bách Khoa Hà Nội
Kho hàng tự động là một hệ thống lưu trữ và quản lý hàng hóa được tự động hóa bằng cách sử dụng các hệ thống công nghệ để thực hiện các tác vụ như tổ chức, di chuyển, và quản lý hàng hóa trong môi trường kho hàng hoặc trung tâm phân phối. Tài liệu được sưu tầm gồm 65 trang, giúp các bạn ôn luyện và phục vụ cho việc học tập, đạt kết quả tốt. Mời các bạn đón xem!
Môn: Thiết kế hệ thống cơ điện tử 13 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:








Preview text:
LỜI CẢM ƠN
CHƯƠNG I: TỔNG QUAN
1.1 Tổng quan nhiệm vụ của hệ thống
1.1.1 Giới thiệu về kho hàng tự động
Kho hàng tự động là một hệ thống lưu trữ và quản lý hàng hóa được tự động hóa
bằng cách sử dụng các hệ thống công nghệ để thực hiện các tác vụ như tổ chức, di
chuyển, và quản lý hàng hóa trong môi trường kho hàng hoặc trung tâm phân phối.
Các hệ thống kho hàng tự động thường sử dụng các robot, máy móc, máy tính và
phần mềm để tối ưu hóa quá trình lưu trữ và phân phối hàng hóa.
Hình 1: Tổng quan hệ thống kho hàng tự động
1.1.2 Nhiệm vụ của kho hàng tự động
Nhiệm vụ của hệ thống là vẫn chuyển hàng hoá vào trong kho gồm nhiều kệ hàng
xếp trồng lên nhau và lấy hàng ra khi được yêu cầu. Việc xếp dỡ hàng hoá này
được hệ thống thực hiện một cách hoàn toàn tự động cộng với việc cơ sở dữ liệu về
hàng hoá được tính toán và lưu trên hệ thống máy tính sẽ giúp kho hàng hoạt động
với hiệu quả vượt trội so với các kho hàng truyền thống.
1.1.3 Vai trò của kho hàng tự động
Vai trò của kho hàng tự động trong hệ thống sản xuất hay trong các chuỗi cung ứng là vô cùng quan trọng. -
Tăng hiệu suất: Kho hàng tự động có khả năng hoạt động liên tục, không cần
nghỉngơi và ít sai sót. Điều này tăng hiệu suất và giảm thời gian cần thiết cho các
quá trình lưu trữ và phân phối. -
Tối ưu hóa không gian: Các hệ thống kho hàng tự động thường sử dụng
robot và thiết bị thông minh để tối ưu hóa sử dụng không gian trong kho hàng,
giúp tiết kiệm chi phí và tăng sức chứa. -
Quản lý hàng hóa: Hệ thống kho hàng tự động có khả năng theo dõi và quản
lý hàng hóa một cách chính xác. Điều này giúp giảm thiểu thiệt hại và mất mát hàng hóa. -
Tăng tính linh hoạt: Các kho hàng tự động có thể dễ dàng thích nghi với sự
thay đổi trong nhu cầu của khách hàng và thị trường. Chúng có thể điều chỉnh dãy
sản phẩm và quy trình theo thời gian thực. -
Giảm tải công việc cho lao động: Bằng cách tự động hóa nhiều tác vụ, kho
hàng tự động giảm tải công việc cho lao động, đặc biệt trong những môi trường
công nghiệp có điều kiện làm việc khắc nghiệt. -
Tăng độ chính xác: Kho hàng tự động giúp giảm lỗi loại trừ sai sót của con
người. Điều này dẫn đến độ chính xác cao hơn trong quá trình lưu trữ và phân phối hàng hóa. -
Tăng khả năng thực hiện theo đơn đặt hàng: Kho hàng tự động có khả năng
xử lý theo đơn đặt hàng, đáp ứng nhu cầu đặc biệt của khách hàng một cách nhanh chóng và hiệu quả. -
Giảm chi phí vận hành: Mặc dù đầu tư ban đầu có thể cao, nhưng trong dài
hạn, kho hàng tự động thường giúp giảm chi phí vận hành bằng cách tối ưu hóa sử
dụng tài nguyên và giảm thiểu lỗi con người.
1.2 Sơ đồ hệ thống hệ thống dẫn động
1.2.1Sơ đồ xe di chuyển trong kho
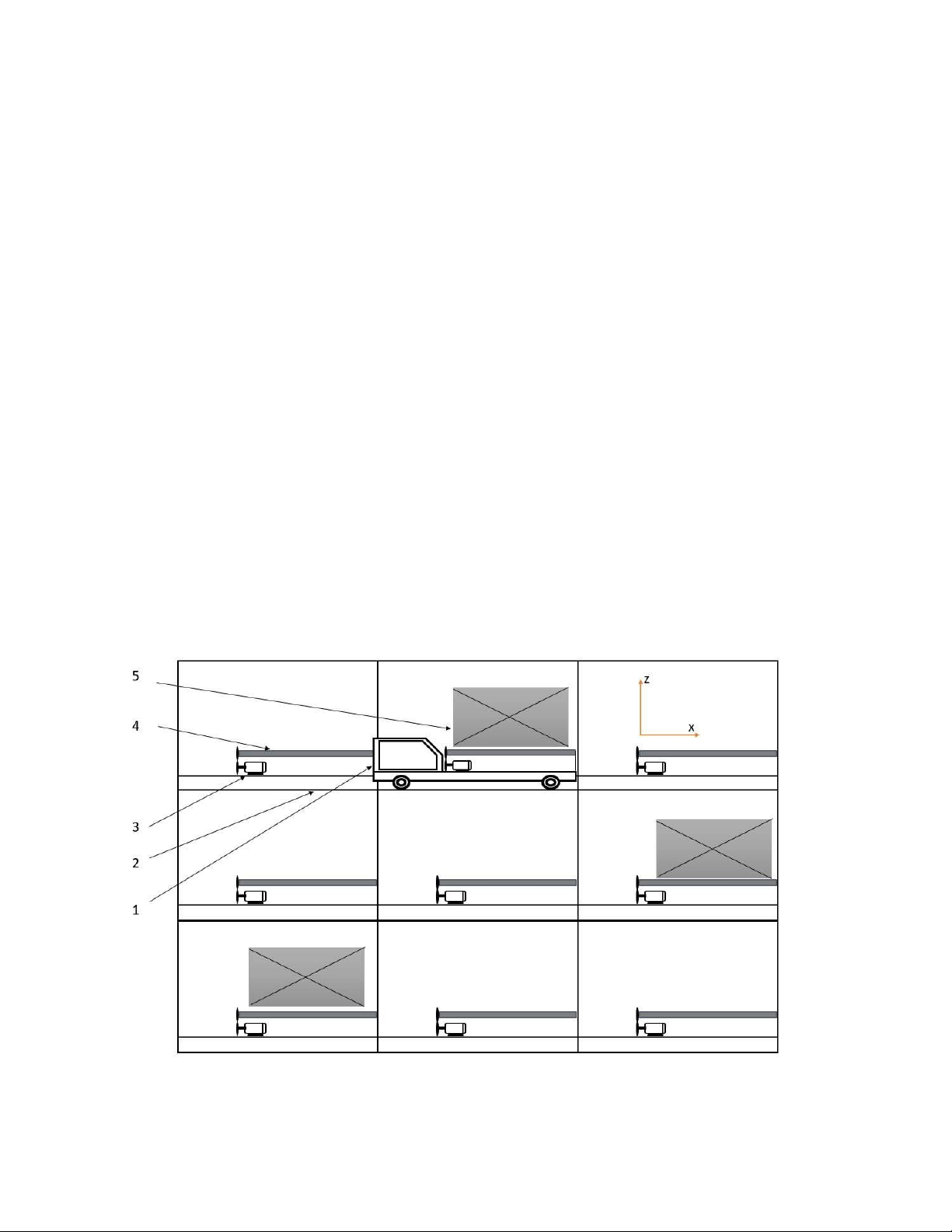
Hình 2: Sơ đồ xe di chuyển trong kho 1.Xe di chuyển 2.Day dỡ xe di chuyển 3.Động cơ trong kho 4.Con lăn trong kho 5.Hàng hoá
Một xe chuyển sẽ làm việc với hai dãy kho hàng hai bên, mỗi dãy kho hàng
có kích thước 3× 3(có thể mở rộng tuỳ nhu cầu)
1.2.2 Sơ đồ bố chí cảm biến
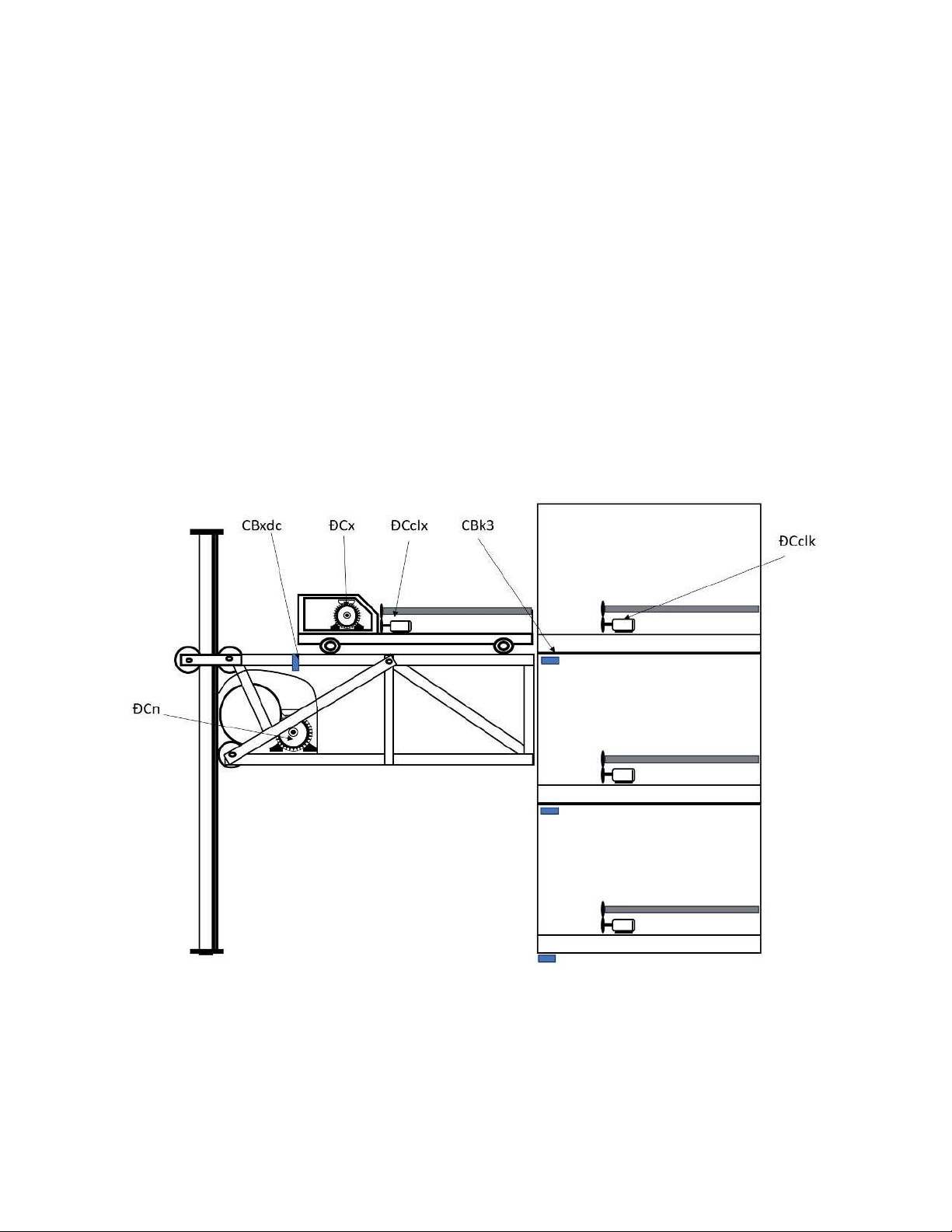
Hình 4: Bố trí cảm biến vị trí xe nâng
CBk1: cảm biến vị trí xe nâng ( lắp trên từng tầng kho)
CBxdc: cảm biến vị trí xe di chuyển trên hệ thống nâng TĐ1: con lăn tiếp điểm
ĐCn: động cơ của hệ thống nâng
ĐCx: động cơ của xe di chuyển
ĐCclx: động cơ cho hệ thống con lăn trên xe
ĐCclk: động cơ cho hệ thống con lăn trong kho
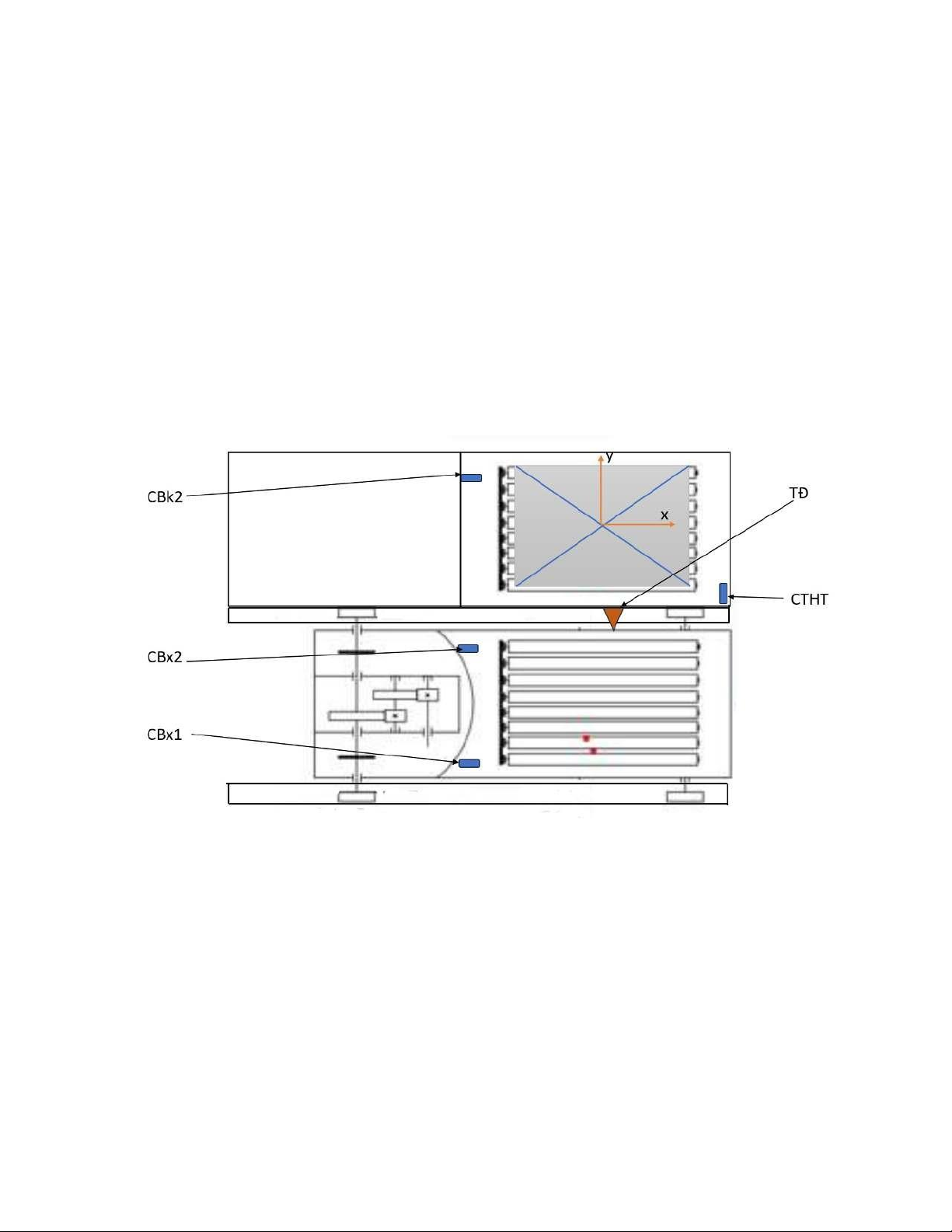
Hình 3: Sơ đồ bố chí cảm biến trong kho
CBx1: Cảm biến số 1 báo có hàng trên xe di chuyển
CBx2: Cảm biến số 2 báo có hàng trên xe di chuyển
CBk2: Cảm biến báo có hàng trong kho
CTHT: Công tắc hành trình báo vị trí của xe di chuyển TĐ1: Con lăn tiếp điểm
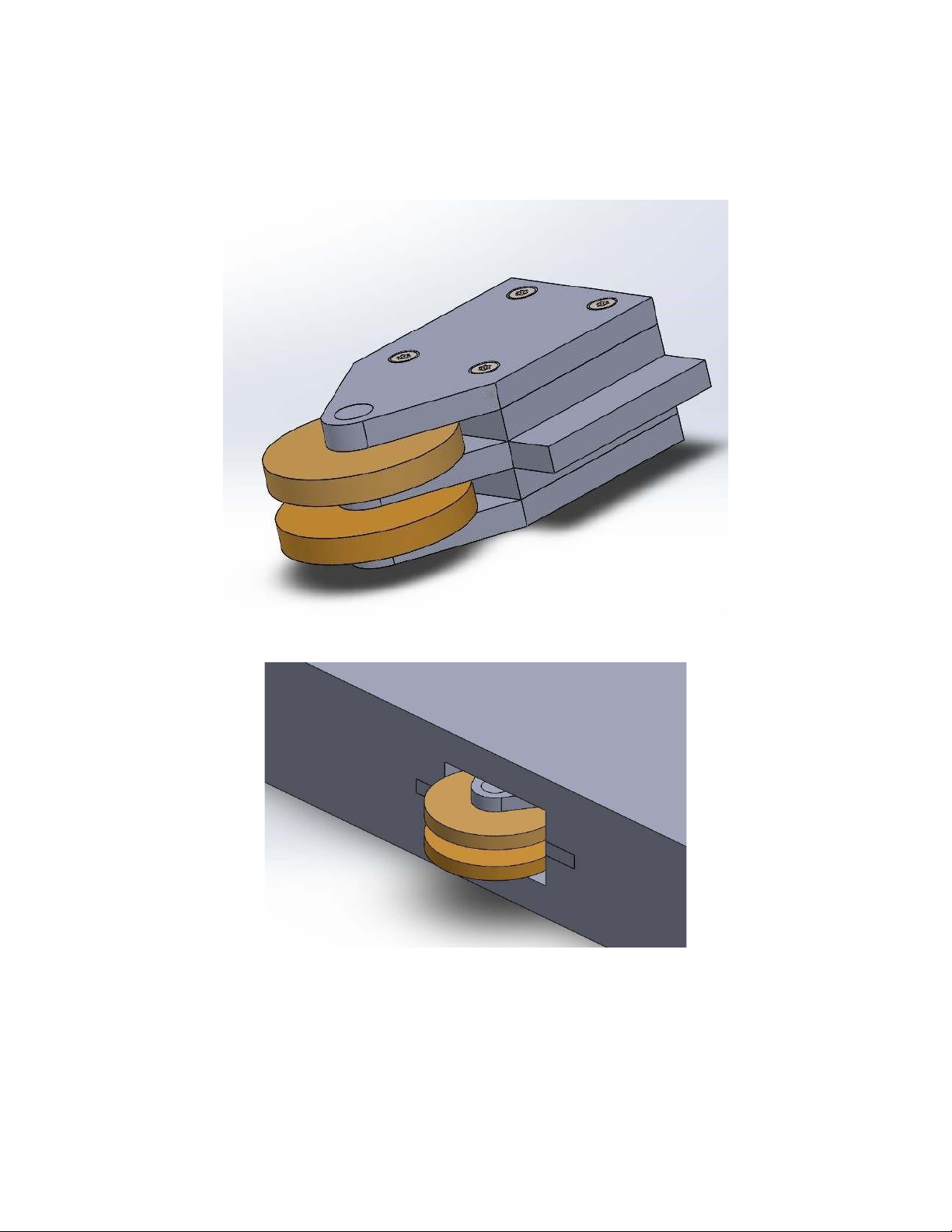
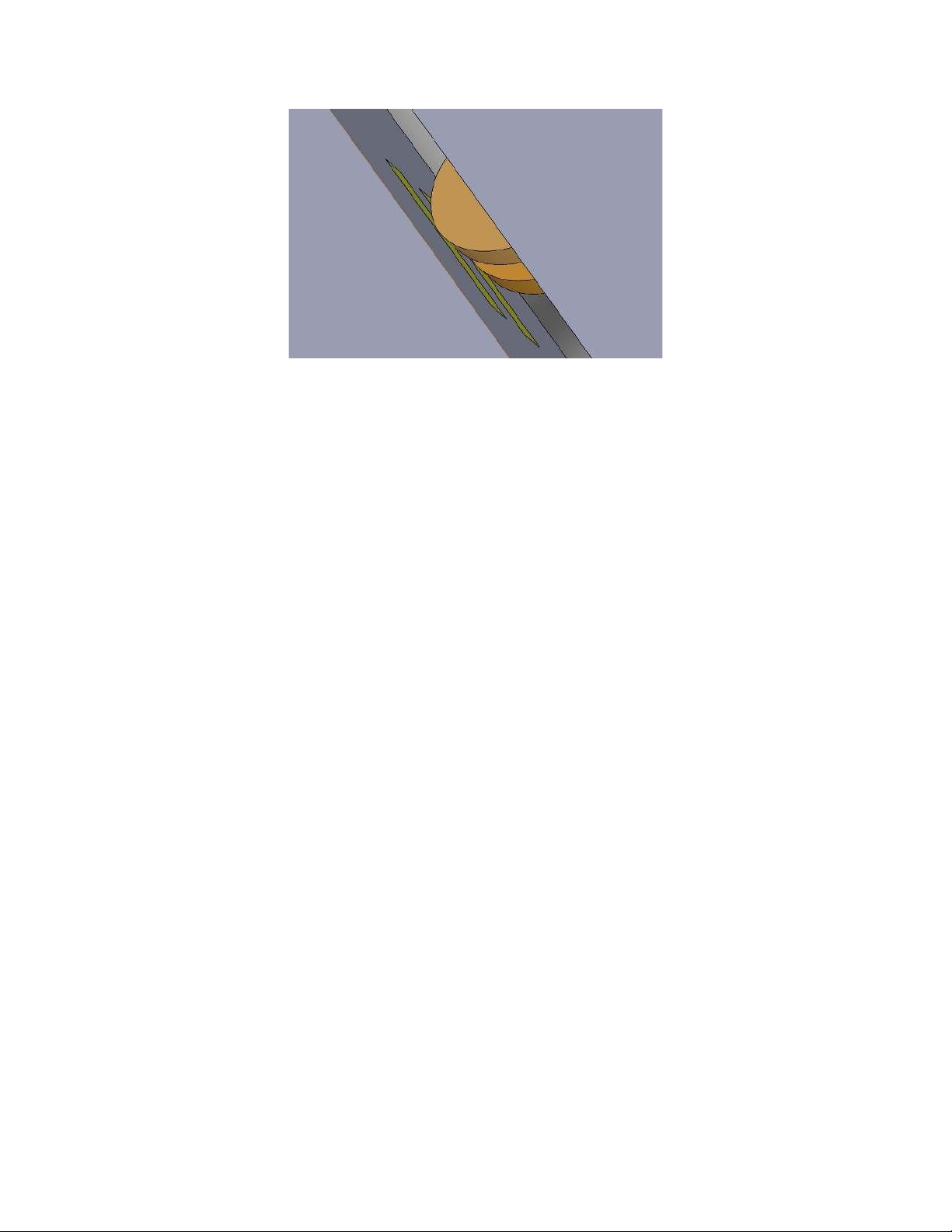
Cơ cấu con lăn tiếp điểm:
Cơ cấu con lăn tiếp điểm làm nhiệm vụ giao tiếp giữa xe di chuyển và kho hàng.
Hình 4: Cơ cấu con lăn tiếp điểm
Hình 5: cơ cấu con lăn tiếp điểm khi lắp lên kho hàng
Hình 5: Tiếp xúc giữa con lăn và hai tiếp điểm trên xe
Khi cảm biến vị trí đảm bảo xe di chuyển đã vào đúng vị trí kho hàng cần thiết thì
hai tiếp điểm trên xe cũng sẽ tiếp xúc với hai con lăn tiếp điểm. Khi đó, xe có thể giao tiếp với kho hàng.
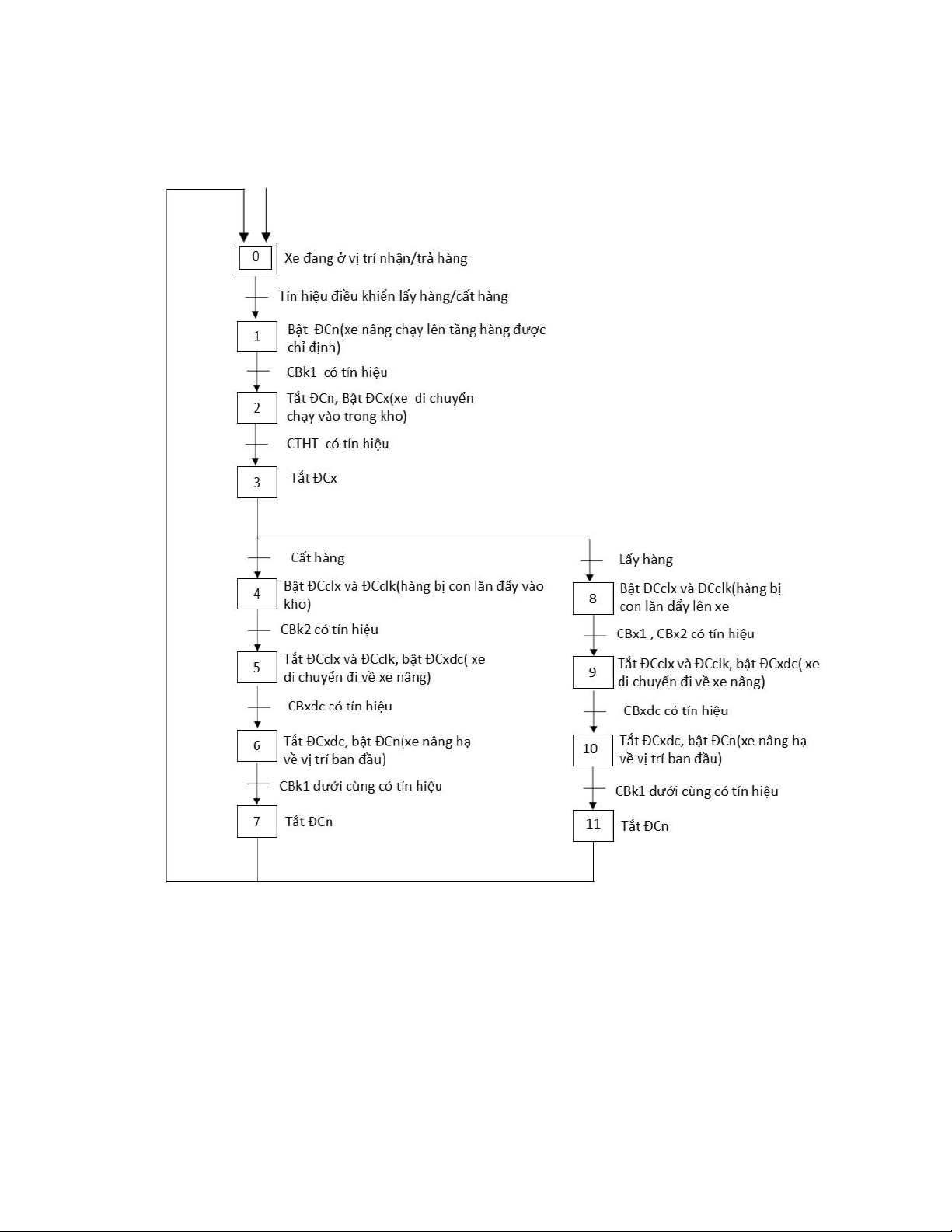
1.3 Nguyên lý hoạt động
Khi cần lấy hoặc cất hàng. Xe nâng sẽ nâng cụm xe di chuyển đến tầng hàng được
trị định. Vị trí được xác định chính xác bằng cảm biến CBk3.
Khi xe di chuyển trong kho, cảm biến CBk2 báo vị trí xe di chuyển sẽ giúp xe đi
đến đúng vị trí kho hàng cần lấy hàng hoặc cất hàng. Khi đó, con lăn tiếp điểm
TĐ1 sẽ tiếp xúc với hai tiếp điểm trên xe để làm nhiệm vụ giao tiếp giữa xe và kho
hàng. Thông qua tiếp điểm, xe di chuyển sẽ điểu khiển các con lăn trong kho hàng
hoạt động đồng bộ với con lăn trên xe để lấy hàng hoặc cất hàng. Trong trường hợp
lấy hàng thì khi thùng hàng chắn cả hai cảm biến CBx1 và CBx2 trên xe di chuyển
là hàng đã lên hoàn toàn xe di chuyển hệ thống con sẽ dừng quay. Trong trường
hợp cất hàng, khi nào thùng hàng đi vào vị trí chắn trước cảm biến CBk1 trong khi
là thùng hàng đã vào hoàn toàn trong kho và hệ thống con lăn sẽ ngừng chạy.
Ngoài ra, cảm biến CBk1 trong kho còn có nhiệm vụ báo về hệ thống máy tính
những kho hàng nào đang có hàng và những kho nào không có.
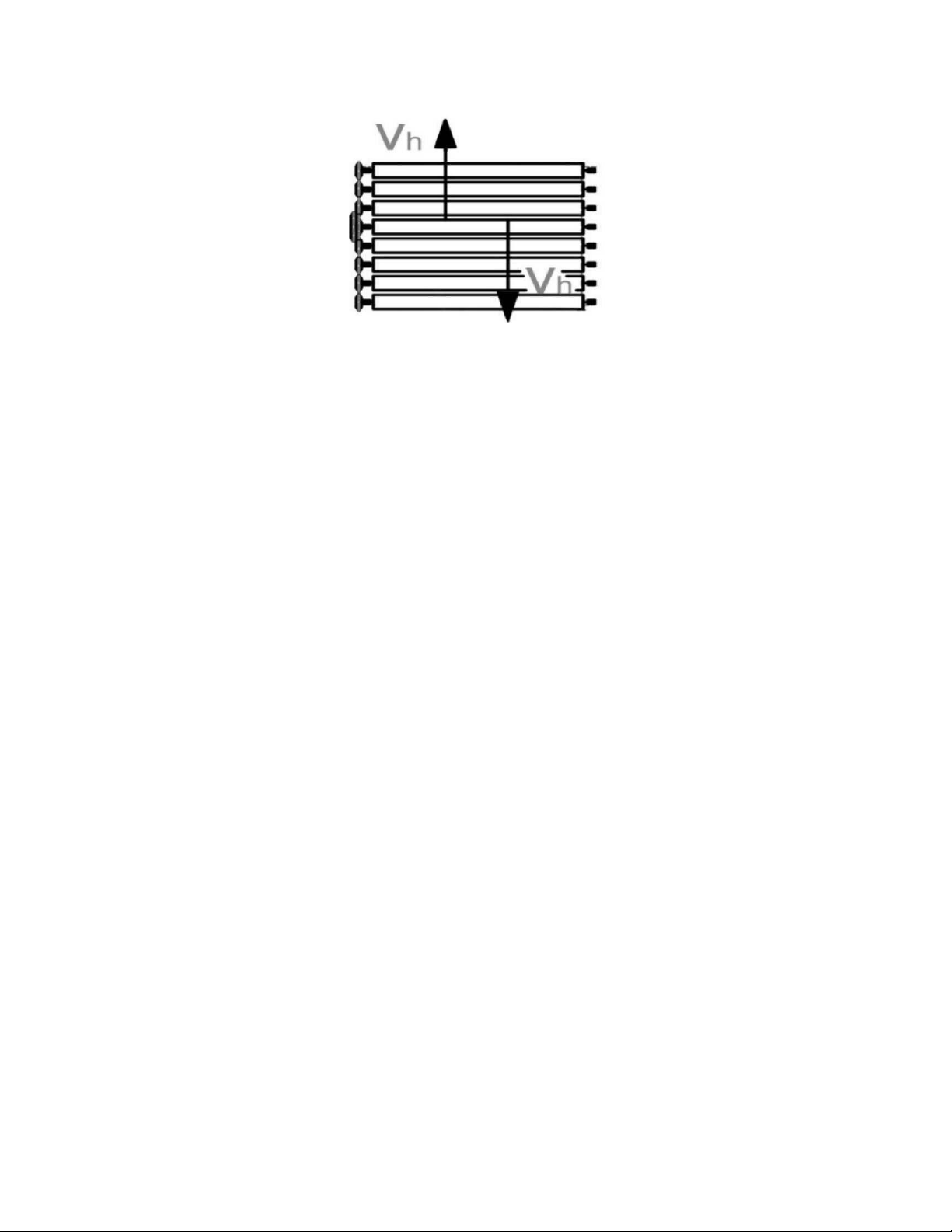
Hình 1. : cơ cấu con lăn đẩy hàng
1.4 Sơ đồ điều khiển
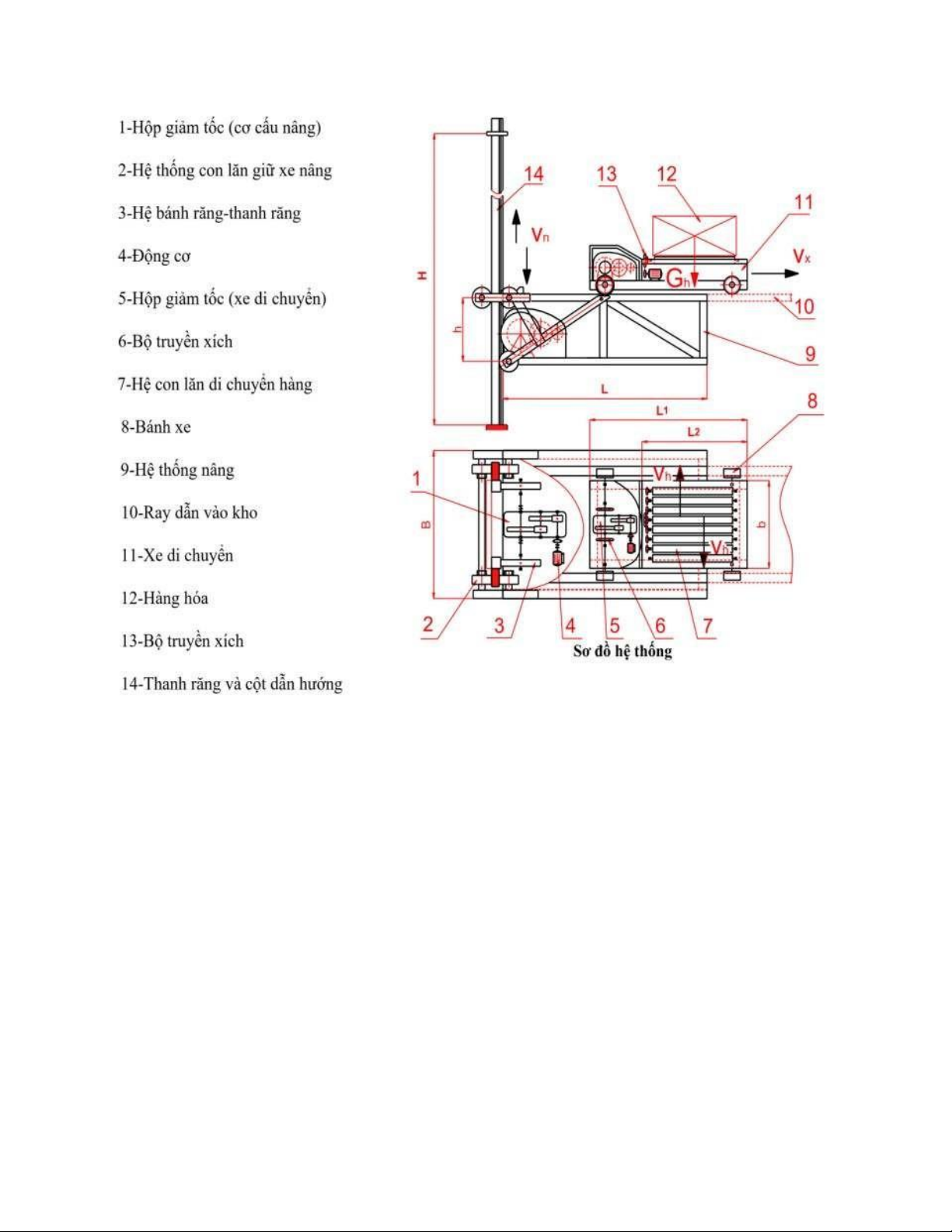
1.5 Phân tích các thành phần cơ bản
Hệ thống gồm hai thành phần hoạt động độc lập là cụm xe nâng và cụm xe di chuyển 1.5.1Cụm xe nâng Bao gồm các bộ phận:
-Hộp giảm tốc : có nhiệm vụ giảm tốc từ động cơ và truyền động đến hệ thống thanh răng bánh răng
-Hệ thống con lăn giữ xe nâng: gồm 6 con lăn làm nhiệm vụ giữ hệ thông nâng ổn
định trên khung và có thể di chuyển lên xuống
-Hệ thống thanh răng bánh răng: thanh răng được gắn lên khung còn bánh răng gắn
trên hệ thống nâng. Khi bánh răng quay sẽ giúp hệ thống nâng di chuyển lên xuống
-Động cơ: là nguồn động lực cho hệ thống nâng
-Hệ thống nâng: là phần khung chịu lực để nâng đỡ các thành phần như: hộp giảm
tốc, động cơ, xe di chuyển và hàng hoá,…
-Thanh răng và cột dẫn hướng: là phần khung cho toàn bộ hệ thống nâng hàng, có
nhiệm vụ chịu lực là dẫn hướng cho cơ cấu nâng
1.5.2 Cụm xe di chuyển Bao gồm các bộ phận:
-Hộp giảm tốc: giúp giảm tốc và truyền động lực từ động cơ sang bộ truyền xích
-Bộ truyền xích(6): làm nhiệm vụ chuyền truyển động từ hộp giảm tốc đến bánh xe giúp xe di chuyển -Bánh xe
-Day dẫy vào kho: làm nhiệm vụ dẫn hướng và là đỡ cho xe di chuyển đưa hàng vào kho
-Bộ truyền xích(13): chuyền truyển động từ động cơ lên hệ thống con lăn trên xe di chuyển
-Hệ con lăn di chuyển hàng: khi con lăn quay sẽ giúp lấy hàng hoá lên xe hoặc đưa
hàng hoá từ xe vào vị trí cần thiết
1.5.3 Các thông số cho trước
1. Thời hạn phục vụ lh = 18500 (h)
2. Đặc tính tải trọng: Va đập nhẹ Cụm xe nâng:
3. Đường kính lăn bánh răng d3 = 140(mm)
4. Chiều cao xe nâng: h = L/4 (mm)
5. Chiều dài xe nâng: L = 1250 (mm)
6. Vận tốc nâng: Vn = 2.8 (m/ph)
7. Trọng lượng tối đa của xe nâng Gn = 180(kg) Cụm xe di chuyển:
8. Trọng lượng tối đa của hàng và xe Gd = 70(kg)
9. Đường kính bánh xe ds = 110(mm)
10. Vận tốc xe di chuyển hàng Vx = 5 (m/ph)
11. Chiều dài xe di chuyển L1 = 950 (mm)
12. Chiều dài phần đặt hàng trên xe L2 = 650(mm)
1.6 Yêu cầu tính toán - Tính toán động học
- Tính toán các bộ phận truyền cơ khí - Tính trọn động cơ
- Xây dựng bản vẽ lắp 2D/3D
- Xây dựng bản vẽ chế tạo một chi tiết
- Mô phỏng nguyên lý hoạt động
CHƯƠNG 2: TÍNH TOÁN ĐỘNG HỌC
2.1 Tính toán thiết kế hệ thống xe nâng
1.1 Tổng quan nhiệm vụ của hệ thống ................................................................... 2
1.1.1 Giới thiệu về kho hàng tự động ................................................................ 2
1.1.2 Nhiệm vụ của kho hàng tự động ............................................................... 2
1.1.3 Vai trò của kho hàng tự động .................................................................... 3
1.2 Sơ đồ hệ thống hệ thống dẫn động ................................................................... 4
1.2.1Sơ đồ xe di chuyển trong kho .................................................................... 4
1.2.2 Sơ đồ bố chí cảm biến............................................................................... 5
1.3 Nguyên lý hoạt động ........................................................................................ 9
1.4 Sơ đồ điều khiển ............................................................................................. 11
1.5 Phân tích các thành phần cơ bản...................................................................13
1.5.1Cụm xe nâng............................................................................................13
1.5.2 Cụm xe di chuyển............................................................................14
1.5.3 Các thông số cho trước.....................................................................15
1.6 Yêu cầu tính toán...........................................................................................16
CHƯƠNG 2: TÍNH TOÁN ĐỘNG HỌC..........................................................17
2.1 Tính toán thiết kế hệ thống xe nâng..............................................................17
2.1.2 Tính chọn công suất động cơ..................................................................20
2.1.4 Tính các thông số trên các trục của hộp giảm tốc 1...............................27
2.1.5 Tính hộp giảm tốc...................................................................................28
2.1.4.1 Tính toán cặp bánh răng cấp 1.........................................................28
2.1.4.2 Tính toán cặp bánh răng cấp 2.........................................................40
2.1.7 Tính toán trục.........................................................................................47
2.2 Tính toán cụm xe di chuyển.....................................................................59
2.2.1 Yêu cầu thiết kế......................................................................................59
2.2.2 Tính toán hệ truyền dẫn..........................................................................60
2.2.2.1 Tính chọn động cơ xe di chuyển.....................................................61 Số liệu chung
- Khối lượng tối đa của kiện hàng và xe di chuyển ngang (5; 6; 7; 8; 11; 12; 13): G = 70 (kg, cho trước); d
- Khối lượng tối đa của xe nâng (1; 2; 3; 4; 9): G = 180 (kg, cho trước); n
- Vận tốc di chuyển theo phương Oz: v = 2.8 (m/ph, cho trước); n
- Chiều dài xe nâng: L = 1250 (mm, cho trước);
- Chiều cao xe nâng: h = L/4 = 312 (mm, cho trước);
- Đường kính bánh răng: d = 140 (mm, cho trước); 3 Yêu cầu kỹ thuật
- Đảm bảo đủ công suất để nâng toàn bộ khối lượng xe nâng và kiện hàng.
- Đúng độ cao theo phương Oz
2.1.2 Tính chọn công suất động cơ Cơ cấu dẫn hướng:
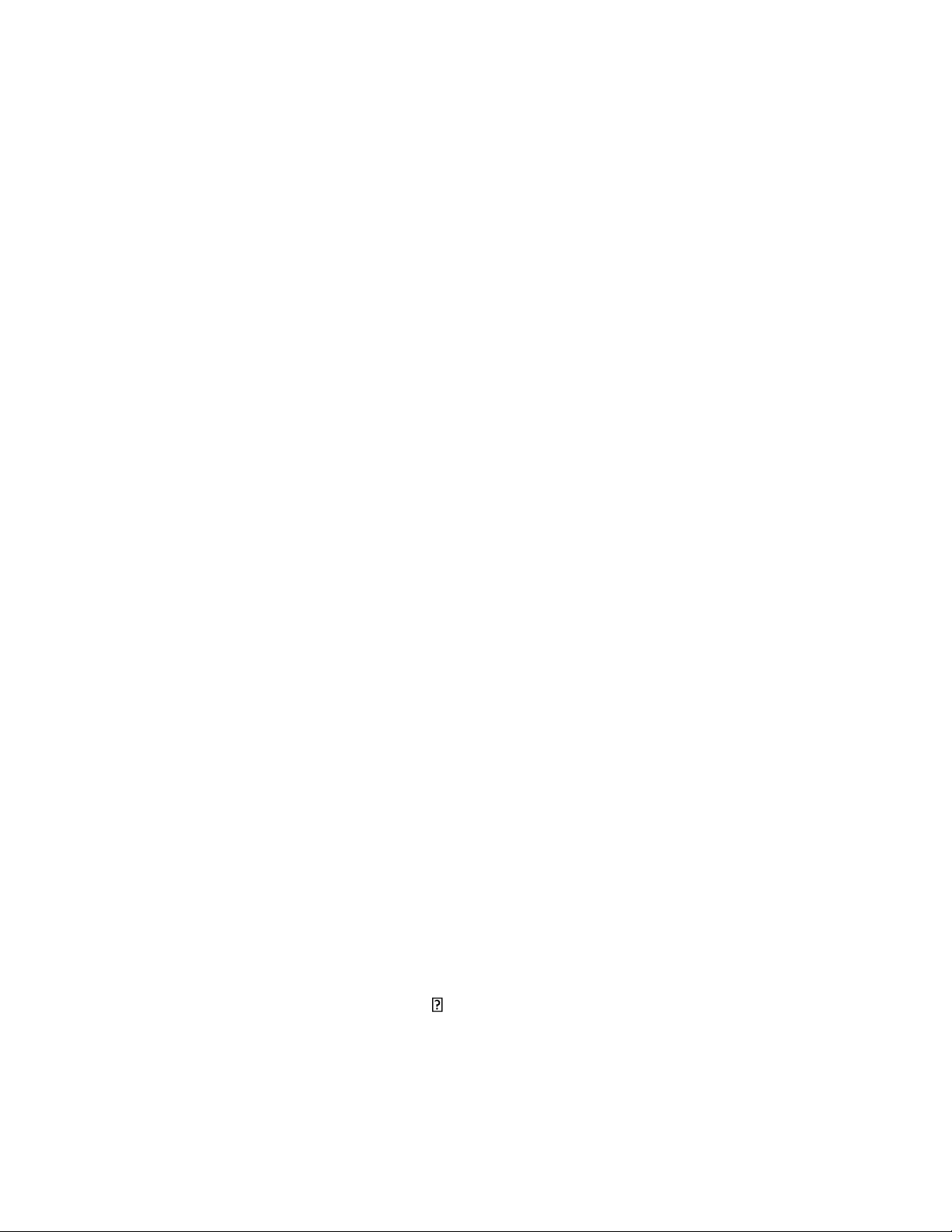
Hình 2.1: Hệ thống dẫn hướng
Cơ cấu dẫn hướng sử dụng 6 con lăn đặt áp trên hai khung thẳng đứng(mỗi bên 3 con lăn)
Hai con lăn A và C là chịu lực chính. Con lăn B giúp hệ ổn định trên khung Cơ cấu dẫn động:
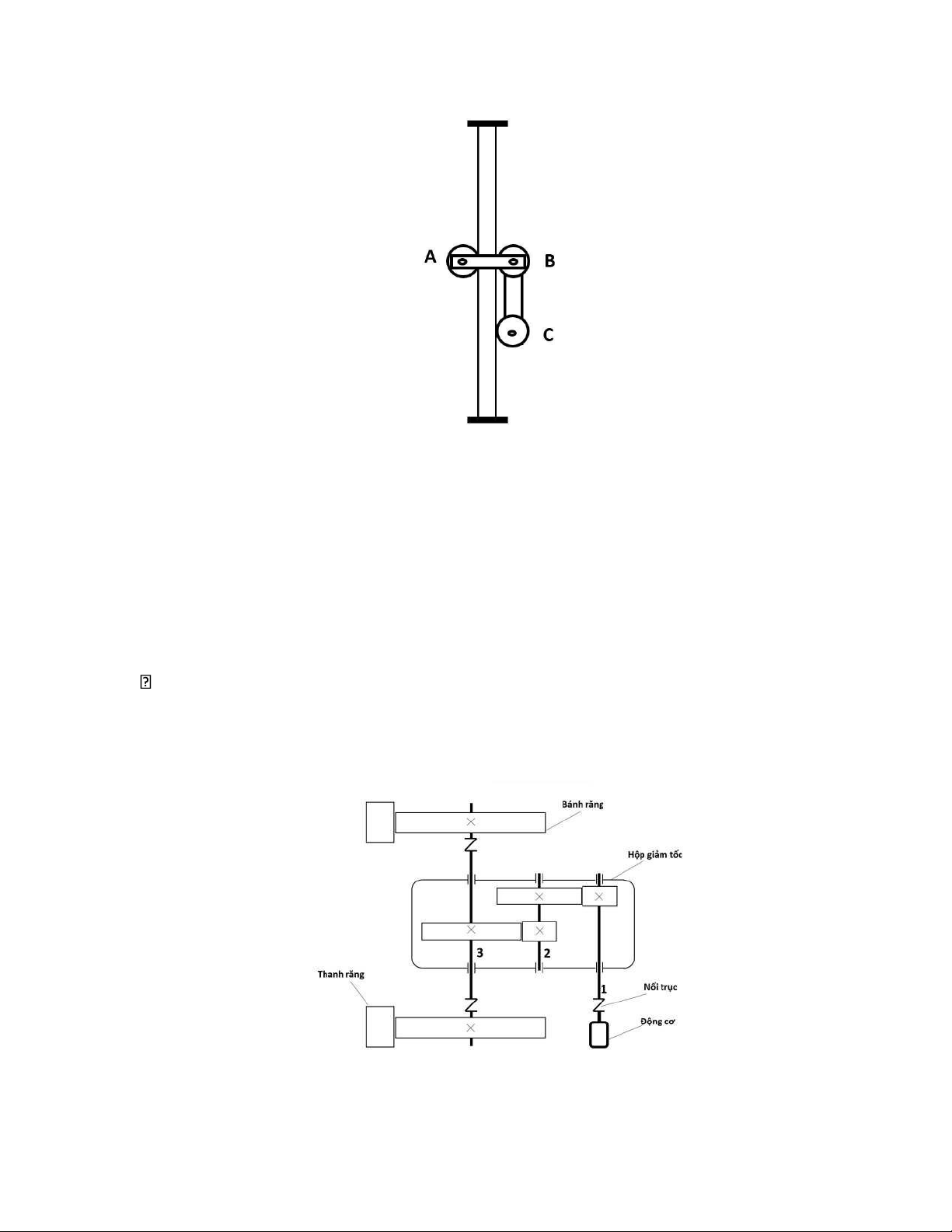
- có nhiệm vụ dẫn động từ động cơ qua hộp giảm tốc, qua các khớp nối đếnhệ
thanh răng bánh răng để giúp xe nâng di chuyển lên xuống
Hình 2.2: Cơ cấu dẫn động
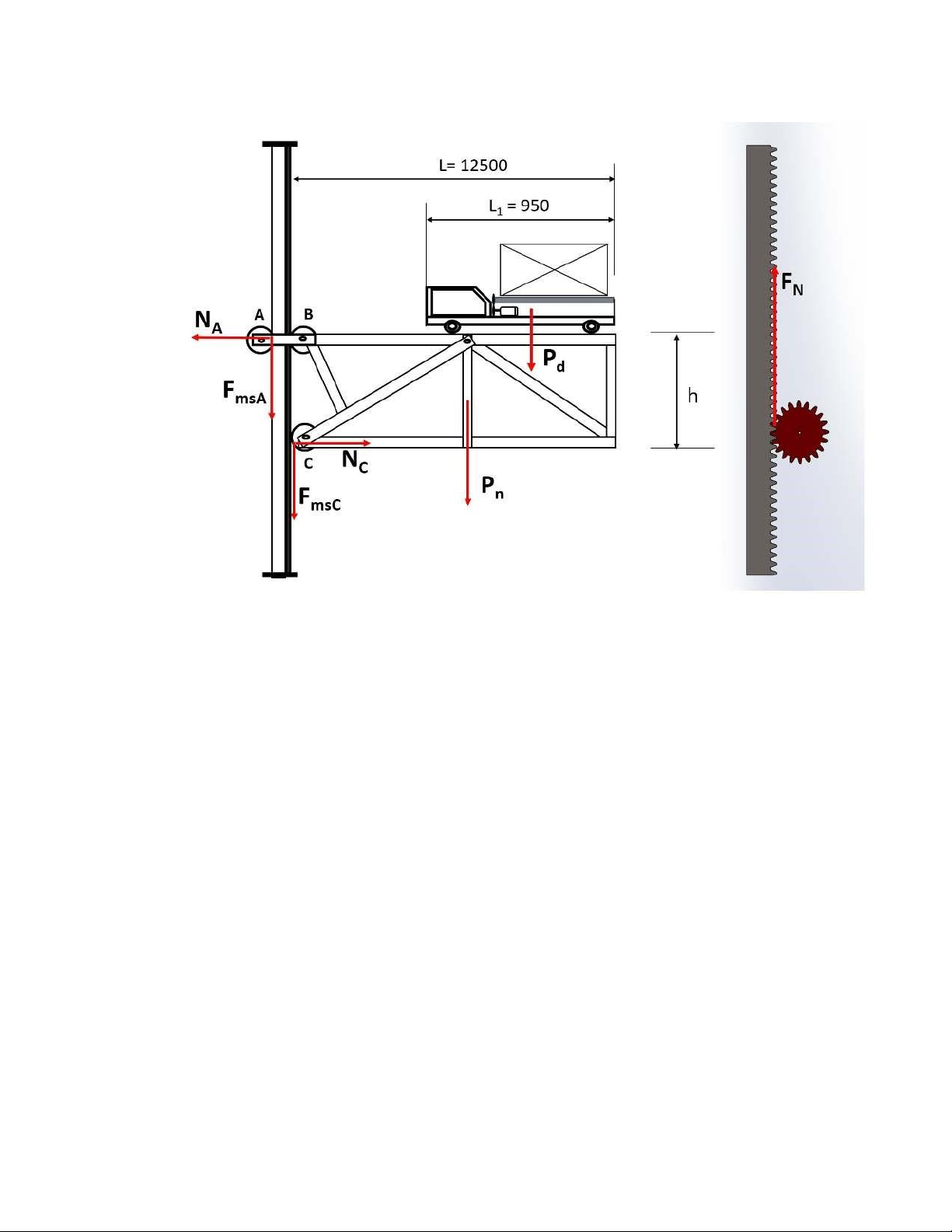
Hình 2.3: Phân tích lực trên cơ cấu dẫn hướng và cơ cấu dẫn động
Coi trọng lực của cụm xe di chuyển và hàng nằm giữa xe di chuyển Trong đó:
- Pn và Pd là trọng lực của xe nâng và xe di chuyển:
Pn = Mn × g = 180× 10= 1800(N) (Gn là khối lượng tối đa của xe nâng) Pd =
Md × g = 70× 10 = 700(N) (Gd là khối lượng tối đa của xe di chuyển và hàng)
- NA và NC là hai phản lực liên kết tại A và C (ở vị trí A và C đều có 2 con lăn hai
bên, nhưng trong phần tính toán này ta sẽ quy về một con lăn để đơn giản trong
việc tính toán và kết quả vẫn hoàn toàn đúng)
- FmsA và FmsC là hai lực ma sát tại các con lăn A và C khi xe di chuyển
- FN là lực nâng được toạ ra bởi động cơ
Cân băng momen tại A ta được:
MA = Gn × L/2 + Gd×(L+L1)/2 – NC × h = 0
NC = (Gn × L + Gd×(L+L1))/2h =
(1800×1.25+700×(1.25+0.95/2)/(2× 1.25/4) = 5532(N)
Tương tự, ta cân bằng momen tại C sẽ tìm được: NA = 5532(N) Có: Fms = fms × N
Tra sổ tay cơ khí ta tìm được hệ số ma sát giứa thép với thép là: fms = 0.05
Từ đó ta tính được FmsA = FmsC = 0.05 × 5532 = 276.6 (N)
Tính công suất động cơ
Để hệ cân bằng thì lực nâng sinh ra phải bằng tổng lực cản: FN = (Fc,N, Fc,H) FN max = max(Fc,N, Fc,H) Trong đó: Lực cản khi nâng là:
Fc,N = FmsA + FmsC + Gn + Gd = 276.6+276.6+1800+700 = 3053(N) Lực cản khi hạ là:
Fc,H = = FmsA + FmsC - Gn - Gd = 276.6+276.6 -1800 -700 = -1946.8(N)
Chú giải: - lực ma sát tại A và C luôn luôn ngược chiều chuyển động
- trong lực của xe nâng và xe di chuyển luôn hướng xuống FN max = 3053(N)
Từ đó ta tính được công suất làm việc của động cơ là: Fn×Vn 3053×2.8
Plv =60×1000 = 60×1000 = 0.142(Kw) Plv
Công suất thực tế của động cơ cần chọn là Pyc = η
Trong đó : η là hiệu suất của toàn bộ hệ thống chuyền động
η = Π η k
i ηi là hiệu suất của bộ truyền thứ i k là tổng số bộ
truyển thứ i có trong hệ thống
Bảng 2.1: tổng hợp hiệu suất bộ truyền Tên bộ truyền i k ηi ηik Khớp nối trục 1 1 0.99 1 Cặp ổ lăn 2 3 0.995 0.985 Cặp bánh răng 3 2 0.97 0.941
Từ đó ta tính được: η = 1× 0.985× 0.941 = 0.917
Pyc = Plvη = 0.1420.917 = 0.155 (Kw)
Tài liệu liên quan:
-

Đề cương ôn tập cuối kỳ hệ thống cơ điện tử | Đại học Bách khoa Hà Nội
56 28 -
Đồ án Thiết kế Hệ Thống Phân Loại Sản Phẩm Theo Chiều Cao | Môn Thiết kế hệ thống cơ điện tử - Đại học Bách Khoa Hà Nội
72 36 -

Hướng dẫn và báo cáo thí nghiệm Môn Thiết kế hệ thống cơ điện tử | Đại học Bách Khoa Hà Nội
82 41 -

Đồ án Phân loại sản phẩm môn Thiết kế hệ thống cơ điện tử | Trường Đại học Bách Khoa Hà Nội
124 62 -

Đồ án môn Thiết kế hệ thống cơ điện tử | Trường Đại học Bách Khoa Hà Nội
109 55