Đồ án tốt nghiệp cơ điện tử Hệ Thống Tưới Cây Tự Động theo độ ẩm | Trường đại học Điện Lực
Đồ án tốt nghiệp cơ điện tử Hệ Thống Tưới Cây Tự Động theo độ ẩm | Trường đại học Điện Lực được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn sinh viên cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Điện chuyên ngành 18 tài liệu
Trường: Trường Đại học Điện lực 502 tài liệu
Tác giả:












































Preview text:
TRƯỜNG ĐẠI HỌC G I O A THÔ G N VẬN TẢI KHOA C K Ơ HÍ BỘ MÔ N K Ỹ THUẬT MÁY &
ĐỒ ÁN TỐT NGHIỆP ĐỀ TÀI:
NGHIÊN CỨU, THIẾT KẾ,
CHẾ TẠO HỆ THỐNG TƯỚI CÂY TỰ ĐỘNG
Sinh viên thực hiện : Hoàng Thiện Phúc
Lớp : Cơ điện t ử K51
Giáo viên hướng dẫn: TS. Lê Lăng Vân HÀ NỘI 05 - 2014 i LỜI Ó N I ĐẦU Tro g
n thời gian thực hiện đề t i à với nội dung ng i
h ên cứu,thiết kế và chế tạo hệ th g n
ố tưới cây tự động , em đã cố gắng vận dụng nh n
ữ g kiến thức đã học ở
trường, trong thực tế. Cù g
n với sự giúp đỡ của thầy Lê Lăng Vân cho tới nay đã hoàn h t à h n nh g n ữ yêu cầu của đề t i
à . Đó là nghiên cứu, thiết k ế và thực thi c hế tạo mạch điều k hi n
ể của hệ thống tưới câ y t
ự động đạt độ chí h
n xác và hoạt động tốt .
Em xin chân thành cảm ơn thầ
y Lê Lăng Vân đã tận tì h n chỉ bả o và giúp đỡ
em hoàn thành đồ án tốt nghiệp. o
D kiến thức còn hạn chế trong quá trì h n thực hiện đồ án e m không tránh khỏi nh n ữ g sai xót kính o m ng quý thầ y cô tr n o g hội
đồng thi chỉ dẫn, bỏ qua và giúp đỡ em.Em rất mong được sự đóng góp của thầy cô à v c
ác bạn để nội dung đề t i à này ngày c àng h o n à thiện h n ơ . Sinh viên thự c hiện Hoàng Thi n ệ Phúc ii MỤC LỤC
LỜI NÓI ĐẦU . ................................................................................................ ii M C
Ụ LỤC ....................................................................................................... iii DANH MỤC H Ì H
N VẼ .................................................................................. v
MỞ ĐẦU...........................................................................................................1 1.Tí h n c p
ấ thiết của đề tài .............................................................................. 1 2. ý L o
d chọn đề tài ........................................................................................ 2 3. Mục đích g n hi n
ê cứu ................................................................................. 3
4. Kết cấu ....................................................................................................... 3 5. Phương h p p á g
n hiên cứu ........................................................................... 3 CHƯƠNG 1. T N Ổ G QUAN V Ề H Ệ THỐNG TƯỚI C ÂY T Ự Đ N Ộ G .... 5 1 1 . . h
K ái niệm về hệ thống tự động ............................................................... 5 1 2 . .Vai t ò r của t ự độ g n ó h a tro g n u
q á trình sản xuất .................................... 5 1 3 . . Ứ g n dụ g n của t ự động h
óa trong tưới tiêu cho câ
y trồng ....................... 6 1 4 . . Các g n hi n ê cứu ở nước n o
g ài ................................................................. 7 1 5 . .Các g n hi n ê c u ứ t o r g
n nước ...................................................................... 9 1 6 . . Các vấn đề cần g n hi n ê c u
ứ bổ sung ........................................................ 9 CHƯƠNG 2. C ÁC PH N Ầ T Ử CỦA M C Ạ H ĐIỀU KHIỂ N H Ệ THỐNG TƯỚI CÂ
Y THEO ĐỘ ẨM ......................................................................... 10 2 1 . . Vi điều khi n ể Pi c 16F 7
8 7A. ................................................................. 11 2 1 . 1 . . Sơ đồ h c ân v à sơ đồ n u g yên lý của PIC 6 1 8 F 7
7 A ..........................1 1 2 1 . 2 . . Cấu t ú r c vi điều khiển PIC16 8
F 77A .............................................. 12 2 1 . 3 . . Các bộ timer của 6 1 8 F 7
7 A .............................................................1 7 2 2
. . Cảm biến DHT11 ..................................................................................1 8 2 3 . . M n à hình LCD 2 d òng 6
1 kí tự. ............ Error! B o o k a m rk not d efined. 2 4 . . Rơle đó g
n ngắt thiết bị .......................................................................... 21 2 5
. . Tụ điện ..................................................................................................2 1
2.6.Điot .........................................................................................................2 2 2 7 . . Đi n
ệ trở .................................................................................................2 2 2 8 . . Thời gi n
a thực DS1307 .........................................................................2 2 CHƯƠNG 3: THI T Ế KẾ HỆ TH ỐNG TƯỚI C
ÂY .................................. 25 3 1 . . Xây dựng b ài to n á c o h hệ th n
ố g ...........................................................2 5 3 2
. . Thiết kế phần cơ ....................................................................................2 6 3 2 . 1 . . Xác đị h n lần tưới n u h c u ầ nước/lần tưới v à khả nă g n cung cấp nư c ớ
.................................................................................................................. 26 iii 3 2 . 2 . . Ph n â chia k u
h tưới .........................................................................2 7 3 2 . 3 . . Tí h n o
t án đường ống chính ............................................................ 27 3 2 . 4 . . Tí h n o t án đường ống nh n
á h, đường ống thứ cấp ........................... 29 3 2 . 5 . . Chọn phươ g n h p p
á tưới ..................................................................3 0 3 2 . 6 . . Vật li u ệ s ử dụ g n trong x ây dựng hệ th g n
ố tưới..............................3 1 3 3
. .Thiết kế mạch điều khiển ....................................................................... 33 3 3 . 1 . . Thiết kế ph n ầ c n
ứ g .........................................................................3 3 3 3 . 2 . .Mạ h c n i thực t ế sau k hi thiết kế (sử dụ g n ph n ầ mềm atium). .........3 3 3 3 . 3 . . Thiết kế ph n
ầ mềm .........................................................................3 4 3 3 . 4
. . Thuật toán điều khiển ..................................................................... 38 3 3 . 5 . . Mạ h
c thực tế sau khi thiết kế v
à chạy thử ......................................4 0 KẾT LUẬ N V À HƯỚNG PH T Á T RIỂN ĐỀ T
ÀI .................................... 41 4 1 . . Đá h
n giá kết quả ...................................................................................4 1 4 2
. . Hạn chế của đề tài .................................................................................4 1 4 3 . . Hướ g n h
p át triển đề tài .........................................................................4 1
TÀI LIỆU THAM KHẢO ............................................................................ 42
PHỤ LỤC ....................................................................................................... 43 iv DANH MỤC H Ì H N V Ẽ Hình 1 . 1 .Bộ h n
ẹ giờ và van điều khiển ................................................................... 8 Hình 2 . 1
. Sơ đồ khối của mạch........................................ .....................................10 Hình 2 . 2 .Sơ đồ chân c a ủ PIC 1
6F877A. ............................................................... 1 1 Hình 2 . 3 . Sơ đồ n guyên ý
l ..................................................................................... 12 Hình 2 . 4 .Cảm b
iến DHT11 ................................................................................... 18 Hình 2 . 5
. Sơ đồ kết nối với VĐK ........................................................................... 19 Hình 2 . 6 . Sơ đồ n guyên ý
l kết nối của LCD1602 trong mạch điện ...................... 20 Hình 2 . 7 . Relay 5 V và s
ơ đồ các chân .................................................................. 21 Hình 2 . 8
. Điot ........................................................................................................ 2 2 Hình 2 . 9 . Sơ đồ các c
hân của DS1307 .................................................................. 23 Hình 3 . 1 . Sơ đồ mạch n
guyên lý............................................................................33 Hình 3 . 2 .Mạ h c n i s u a k i
h thiết kế .......................................................................... 34 Hình 3 . 3
. Giao diện của phần mềm lập trình . .................................................. 3 5 Hình 3 . 4 . P 2 G C mạ h c nạp PIC q
ua cổng COM ................................................... 36 Hình 3 . 5 . Gi o a d iện phần mề m n p ạ p
ickit2 .......................................................... 37 Hình 3 . 6
. Lưu đồ thuật t oán điều khi n
ể ................................................................. 3 9 Hình 3 . 7 . Mạch thực tế sau h
k i thiết kế và chạy thử ............................................. 40 v MỞ ĐẦU
1.Tính cấp thiết của đề tài
Nền nông nghiệp của nước ta là nền n n ô g nghiệp vẫn c n ò lạc hậu cũng như
chưa có nhiều ứng dụng khoa học kĩ thuật được áp dụng vào thực tế. Rất nhiều quy tr n ì h kĩ h t uật trồng t rọt, chă m sóc được tiến hà h n một cách chủ qu n a và k hông
đảm bảo được đúng yêu cầu. ó C thể nói trong ô n g n học n o
g ài những kĩ thuật trồng trọt, chă m sóc t ì h tư i
ớ nước là một trong các kh u â quan trọng n hất t o r ng trồng trọt, để đảm bảo câ y si h n trưởng và h p át triển bì h n thườ g
n , tưới đúng và tưới đủ theo yêu cầu nô g n học của câ
y trồng sẽ không sinh sâu bệnh, hạn ch ế thuốc trừ s u â cho sản phẩm an to n à , đạt nă g n suất, hi u ệ quả cao.
Ngoài ra trên những tuyến phố ở khu vực trun g tâ
m thành phố chúng ta vẫn bắt gặp h n ì h n ả h c c
á xe bồn chở nước tưới cây dọc đường gây ùn tắc, mất an toàn giao th n ô g.
Mặt khác hiện nay nước ta a đ ng t o r ng g a
i i đoạn công nghiệp hóa, hiện đại hóa các thiết bị máy ó
m c tự động được đưa v o à phục vụ tha
y thế sức lao động của con người. ì V vậy th ế
i t bị tưới đang được nghiên cứu, thiết kế, chế tạo đưa vào thực tiễn ngày đư c ợ áp dụng c n
à g nhiều. Thiết bị tưới cũng rất đa dạng về chủng loại (vòi phu
n mưa, phun sương, vò inhỏ giọt bù p á , vòi kh n ô g bù p á , dâ y tưới nhỏ giọt...) có thô g n số khác nh u a phục vụ cho c c á loại cây khá
c nhau được chế tạo từ nhi u ề nước như I r s ael, à H n Qu c ố , à Đ i L a
o n, Trung Quốc..., sẽ rất thuận tiện cho
người sử dụng lựa chọ
n phù hợp với nhu cầu sử dụng của mình .Việc tính toán để
lựa chọn thiết bị hệ th n
ố g tưới đáp ứng được nhu cầu tưới t heo nông học cây trồng và p ù h hợp điều ki n ệ ki h n tế, kỹ thuật ch o hiệu quả c o a là việc cần thi t ế cho việc phát triển tr n
ê diện rộng của hệ thống tưới n
ày. Hệ thống tưới phun đáp ứ g n độ ẩm gốc, độ ẩm lá và h k ông khí c o
h cây trồng phát triển tốt, hệ thống tiết kiệm nước 1
tạo điều kiện cho cây trồng hấp t u h di h n dưỡng kh n ô g gây rửa tr i ô , tho i á hóa đất,
không gây ô nhiễm môi trường. Hệ th n
ố g tưới nước tự động có thể kết hợp với b n ó ph n
â , phun thuốc hóa học. Hơn thế nữa, với việc thiết kế một hệ thống tưới cây tự động sẽ gi p
ú cho con người không phải tưới cây ,kh n ô g phải tốn chi phí
nhân công tưới nước cũng như giá m sát thời i
g an tưới cây. Với hệ thống này ,việc
tưới cây sẽ là tự động tù
y theo nhiệt độ thời tiết nắng hay mưa, độ ẩm cao hay
thấp, mùa nào trong năm… Tất cả các điều k ệ
i n đó sẽ được đưa vào hệ thống tính
toán và đưa ra thời gian chí h
n xác để bơm nước .Người lao động sẽ không cần
phải quan tâm đến việc tưới cây, cây sẽ được sinh trưởng và h p át tri n ể tốt hơn nhờ việc tưới c ây p hù hợp và ch n í h xác hơn. 2. Lý o d chọn đề tài
Hệ thống tưới tự động (tưới nhỏ giọt, phun sương …) là hệ th n ố g thiết bị
tưới tốt nhất đáp ứng theo yêu cầu si h n trưở g n câ y trồng đa g
n được ứng dụng rộng
trên các nước phát triển. Hệ thống tưới nước tự động là một ì h nh thức tưới nước h p ợ ý
l , tiết kiệm sức lao động và chi phí nh n â cô g
n . Vốn đã rất phổ biến từ nhiều
nước trên thế giới. Tuy nhiên ở Việt Nam chỉ vài ba năm trở lại đây việc vận dụng
hệ thống này mới trở thành xu hướng. Hệ thống tưới nước tự động cũng trở nên phổ biến hơn với ngư i ờ nô g
n dân ở nông thôn cùng với qu á trình hiện đại hóa nô g n nghiệp ô n g n thôn nh g n ư không phải người d n
â nào cũng mạnh dạn đưa vào
xử dụng vì chi phí đầu t ư cao.
Mặt khác khoa học kỹ thuật phát triển mạnh mẽ đã làm thay đổi cuộc sống con người, à l m cho cu c
ộ sống con người ngày càng trở n n
ê tiện nghi và hiện đại.
Kỹ thuật điện tử phát triển con người đã tạo ra nh g n ữ thi t
ế bị máy móc hiện đại
thay t hế cho con người nh n ữ g cô g
n việc nặng nhọc và đòi hỏi s ự chính xác cao. 2
Kỹ thuật điện tử phá ttriển đã nh n
a h chóng được ứng dụng vào trong nhiều lĩnh vực: cô g n nghiệp, giao h t ô g n vận tải, hà g
n không vũ trụ...Các thiết bị điều khi n ể tự độn
g giữ vai trò cực kỳ quan trọng góp phần lớn cho sự tiến bộ không ngừng của á
c c lĩnh vực này. Ngành nô g
n nghiệp nước ta hiện nay còn phụ thuộc nhi u ề v o
à khí hậu tự nhiên ,và với nhữn g phư n ơ g ph p á sản xuất ca h n tác truyền
thống không mang lại năng suất cao . h K i ki h n tế xã hội ph t á triển thì n u h cầu con người càng được n n
â g cao, đòi hỏi chất và lượng nâ g n c o a . Do đó cần đến các thi t
ế bị kỹ thuật tiên tiến có khả năng đo đạc và điều khi n
ể được các thông số của môi trư n ờ g như :nhiệt độ, đ ộ ẩm kh n ô g khí ,chất di h n dưỡng cu g n cấp p ù h hợp
với từng giai đoạn phát triển của cây trồng.. .Xuất ph t á từ nh n
ữ g vấn đề thực tiễn trên em đã ng i h ên cứu và tiến hà h
n thiết kế : “Hệ Thống Tưới Cây Tự Động
theo độ ẩm’’ . 3. Mục đích g n hiên cứu
Vận dụng kiến thức đã học để n h g iên cứu thi t
ế kế và chế tạo mô hình hệ
thống tưới tự động, từ đó đưa vào ứ g
n dụng thực tiễn. Giúp cho việc tưới tiêu cây
trồng ở nước ta có những phương án mới và đạt được hiệu quả cao. 4. Kết cấu - Tổng quan về đề tài
- Giới thiệu các linh kiện sử dụng trong mạch điều khiển
- Thiết kế hệ thống tưới t ự động
- Kết quả và định hướng phát triển 5. Phương p á h p g n hiên cứu
Để thực hiện nội dung đề t i à ng i h ên c u ứ , e m tiến hà h n phương pháp ng i h ên cứu sau: Các kết quả nghi n ê cứu kế thừa 3
- Kế thừa công trình nghiên cứu của các thế hệ trước về cơ sở lý thuyết
của các phần mềm lập trì h n v à ô m phỏ g n .
- Kế thừa các nghiên cứu có trong thực tiễn. Định hướ g n g n hi n ê cứu
- Nghiên cứu phần mềm lập trình và mô phỏng trên máy tính.
- Tìm ra phương pháp lập trình đơn gi n ả , dễ s ử dụ g n , hi u ệ quả. Kiểm chứng
- Chạy thử mô hình nhiều lần, kiểm tra phát hiện lỗi v à từ đó o h àn thiện hệ thống. 4 CHƯƠNG 1. T N Ổ G QUAN V Ề H Ệ THỐNG TƯỚI C ÂY T Ự Đ N Ộ G 1 1
. . Khái niệm về h ệ thố g n t ự động
Hệ thống điều khiển tự động là hệ thống bao gồm các phần tử tự động nhằm điều khiển các u q á trình xảy ra tro g n thiên nhi n ê ,cuộc sống mà kh n ô g có sự tham gia trực tiếp của c on n gười. Hệ thống điề
u khiển tự động: là tập hợp các h t à h n ph n ầ vật lý có mối liên quan và tác đ n ộ g u q a lại lẫn h
n au để ch ỉhuy ,tự hiệu chỉn h hoặc điề u khiể n một h ệ thống khác. Hệ thống điều khi n ể t ự động x uất hiện n g y à n ay rất phổ biến. - Hệ thống điều o h à h k ô g n khí.
- Hệ thống điều chỉnh độ ẩm. - Hệ thống t ự động b áo h c áy v.v.. Tro g n môi trườ g n sản xuất: - Các máy t ự động.
- Các đường dây sản xuất, lắp r áp t ự động.
- Các máy điều khiển theo chương r
t ình, Máy tính, Robot v.v.. 1 2 . .Vai t ò r c a ủ t ự động h a ó t o r g
n quá trình sản xuất Lịch sử ho n
à thiện của công cụ, phương tiện sản xuất phát tri n ể tr n ê cơ sở
cơ giới hóa và điện khí hóa. Khi có những đột phá mới tro g n lĩnh vực cô g n nghệ vật li u ệ và ti p ế th o e là điện tử v à t n i học thì ô c g n n ghệ t ự động ó c cơ hội h p át triển
mạnh mẽ, đem lại muôn v n à l i ợ ích thiết thực cho ã
x hội. Đó l à mấu chốt của năng
suất, chất lượng, giá thành. Tro g n thực ti n
ễ khi áp dụng tự động hó
a vào sản xuất sẽ mang lại nh n ữ g hiệu quả h k ô g n nhỏ c o h h p p é giảm giá t à h nh à v n n
â g cao năng suất lao động, cải 5
thiện điều kiện sản xuất, đáp ứ g
n cường độ cao về sản x ấ
u t hiện đại, thực hiện chu ê y n môn ó
h a và hoán đổi sản xuất. Từ đó sẽ tăng khả năng cạnh tranh, đáp ứng yêu cầu s n ả xuất. Tro g n một tương l i
a gần tự động hóa sẽ đó g n vai trò ô v c n ù g quan trọng và không thể thi u
ế , bởi vì nó không chỉ ứng dụng t o
r ng sản xuất mà còn ứng dụng
phục vụ đời sống con người .Trong sản xuất ó n h
t ay thế con người nhữ g n công
việc cơ bắp nặng nhọc, cô g
n việc nguy hiểm, độc hại,công việc tinh vi hiện đại . .. còn trong đời sống o c n người những ô
c ng nghệ này sẽ được ứng dụng p ụ h c vụ n u h c u ầ số g n . ó N sẽ là phương tiện k hô g n thể thiếu t o r ng đời số g n chúng ta. 1 3 . . Ứ g n dụ g n c a ủ t ự động h a ó trong tưới i t êu c o h c y â trồng
Công trường thực vật là căn cứ địa sản xuất nông nghiệp của hiện đại hóa.
Toàn bộ quá trình đều ó
c thể điều khiển tự động để giảm bớt sức người, nâ g n cao sản lư n ợ g…
Mặc dù tự động hóa ứng dụng từ rất lâu cho việc tưới tiêu ,so g n nó chỉ phát
triển ở một số nước phát triển ,còn đối với các nước chậm phát triển tuy nền nông
nghiệp chiếm tỉ lệ lớn nhưng việc ứng dụng tự động ó h a h
c o việc tưới cây vẫn còn
rất chậm. Hiện nay, được sự trợ giúp của nước ngoài á
c c nước đang phát triển đã đưa dần tự động hó
a vào đời sống và sản xuất, đặc biệt là các nước đông nam á trong đó có Vi t ệ Nam.
Ngày nay với sự phát triển mạnh mẽ của công nghệ chế tạo thiết bị tự động hóa, kết hợp với thà h
n tựu trong công nghệ vi điện tử và công nghệ thông tin, đã cho p é h p tạo n n ê một giải ph p á tự độn
g hóa trong mọi lĩnh vực. Có thể nói tự động hóa trở thà h n xu hướng tất yếu c o
h mọi lĩnh vực cho bất kì quốc g a i , vùng lãnh thổ nào. 6 1 4 . . á C c g
n hiên cứu ở nước g n oài Ở nước n o g ài đ ã có nhiều nghi n
ê cứu ứng dụng về hệ thốn g tưới câ y t ự động: Đầu nh g n
ữ năm 80 , Liên Xô ( cũ ) đã chế tạo ra một lo i ạ máy tự động ứng
dụng trong nông nghiệp. Khi làm việc loại máy này có thể quan sát được độ ẩm
của thổ nhưỡng, nhiệt độ không khí, sức g ó
i … Nó có thể xác định được phương
pháp tưới và tiến hành tưới cho câ y trồng ,nhờ một lo i ạ má y làm mưa nhân tạo khác. Hãng robot Droplet g iới thiệu robot tư i ớ c y â tích hợp những cô g n nghệ tự động mới nhất, điện o t án đám â
m y và một số dịch vụ kết nối khác c o h phép Dr p o let có
khả năng tự động ngắm hướng vòi h p n
u , lượng nước và tần s ấ
u t tưới để tự động
tưới nước cho cây theo những lịch trình tự tính to n á dựa trên ph n â tích các dữ liệu đầu v o
à . Droplet là 1 chiếc vòi phun tự động có khả năng tự điều chỉnh hướng dò g
n nước phun ra từ ống đến h t n â câ y t o r g n b n á kí h n 9,14 mét. Trướ c khi o r bot
tự động vận hành, người dùng chỉ cần h k ai b o á tên của á c c lo i ạ cây có mặt trong vườn t ô h g n u q a điện thoại, máy t n
í h bảng,... được kết nối không dây với robot. Dựa trên thông i
t n về tên các loại cây ,Dropl t e sẽ tự tra cứu h t ô g n t n i tr n ê mạng
nhằm xác định lượng nước cũng như tần số tưới cho phù hợp với từng loại cây. Bên cạnh đó, D o r pl t
e cũng tự tra cứu dữ liệu về tình hình thời tiết của địa điểm
làm việc để xác định mưa/nắng n
hằm đưa ra lịch làm việc thích hợp. Bộ điều khi n
ể tưới cây tự động Israel dễ dàng được lập trình theo yêu cầu tưới
của người sử dụng. Chỉ cần vài h t o a tác lập t ì r h n , u c g n cấp c o h hệ th n ố g một nguồn nước đầu v o
à và dẫn các đầu tưới đến các vị trí cần tưới là đã hoàn tất việc lắp đặt hệ th n ố g tưới t ự động th o
e công nghệ tưới tiên tiến. Có 2
loại điều khiển: Điều k hi n ể h t o e giờ tưới và điều k hi n ể h t o e c u h kỳ. 7 Điều khiển th o
e giờ tưới: Hệ thống hoạt động đúng h t o e thời gian đồng hồ yêu c u ầ . Điều khiển h t eo h
c u kì tưới: Hệ thống hoạt động theo vòng lặp thời gi n a .
*Bộ điều khiển thời gian v à v an điện từ. - Bộ điều khi n
ể tự động: dùng để cài đặ tthời gian tưới tự động, nh ư giờ hoạt
động, thời gian hoạt động, thời gian dừng hay chuyển đ i ổ các vị t í r tưới. Bộ cảm
biến mưa sẽ tự động n gừng tưới h
k i có mưa hay độ ẩm cao.
- Van điện từ: là thiết bị nhận và truyền tín hiệu từ bộ điều khiển đến các đầu
tưới, để các đầu tưới hoạt động. Hình 1 . 1 .Bộ h n
ẹ giờ và van điều khiển * Hoạt đ n
ộ g của hệ thống tưới: Hệ thống được mặc định giờ tưới, đến giờ hoạt động thì bộ điều k hi n ể ẽ s t ự động truyền t n í hiệu đến các v an điện t , ừ các v n a sẽ t ự động mở ra và cu g
n cấp nước cho các đầu phun .Thời gi n
a tưới được cài đặt sẵn theo ý
muốn của người sử dụ g n . 8 1 5
. .Các nghiên cứu tro g n nước
Ở nước ta đã có nhiều nghiên cứu và ứng dụng hệ thống tự động v o à trong
cuộc sống. Người dân đã sáng tạo ra các hệ th n ố g b n á tự độn g giúp tiết kiệ m sức
lao động, hiệu quả mang lại cao hơn o s với tư i ớ thủ cô g n .Tu y n i h ên hệ thống này còn n hiều n
hược điểm cần khắc phục để mang lại hiệu q ả u cao nhất có thể.
Ở các trường đại học chu ê y n g
n ành kĩ thuật đã có nhiều đề à t i về hệ th n ố g tưới
nước tự động do sinh viên thực hiện .Tu y nhiên vẫn c n ò nhi u ề mặt hạn chế cần khắc phục.
Hệ thống tưới phun tự động đa năng- một công t ì
r nh khoa học của 2 giảng viên trường Cao đẳ g
n Công nghiệp (CĐCN) Huế: ti n
ế sĩ Lê Văn Luận và thạc sĩ Lê Đình Hi u
ế . Các thiết bị chính của hệ thống tưới phun đa năng này gồm có 1 cảm
biến đo nhiệt độ và 1 cảm biến đo độ ẩm của đất được cài đặt tại nhà màng trồng
hoa, hệ điều khiển được lập t ì r h n tr n ê PLC-S7- 2 1 0
0 . Khi các cảm biến cho thông
số độ ẩm của đất hoặc nhiệt độ không khí tại nhà màng b o á h
iệu cần nước, tín hiệu
này sẽ đưa đến hộp điều khiển PLC. Tại đây các chức năng sẽ được điều khiển tự
động để nhận nước và đưa tưới tự động tưới phun th o e c c á vò iph n u lắp đặt, và sẽ tự ng n
ừ g trong đúng 5 phút, khi cả m biến báo đ ộ ẩ
m hoặc nhiệt độ đã đạt yêu cầu.
Hệ thống tưới phun tự động đa năng là sản phẩ
m khoa học có ý tưởng hay ,tính ứng th ế
i t thực và đã được thử nghiệm có hiệu quả thực ế t . 1 6 . . á C c vấn đề cần n ghiên c u ứ bổ su g n Các nghi n ê cứu ở tr n ê đã đư c
ợ ứng dụng từ lâu .Tu y nhiên ,do giá thành quá cao n n
ê nhiều người chưa có điều kiện để sử dụng các thiết bị đó. Vì vậy, tác giả đã thực hiện g n hi n
ê cứu hệ thống tưới sử dụng cảm biến độ ẩm của không khí để quyết đ n ị h thời i g an tư i ớ cho câ y trồng. Hệ thống c ế h tạo đơn giản, chi p hí th p ấ d ễ sửa chữa. . . 9 CHƯƠNG 2. C ÁC PH N Ầ T Ử CỦA M C Ạ H ĐIỀU KHIỂ N H Ệ THỐNG TƯỚI CÂ Y THEO ĐỘ ẨM
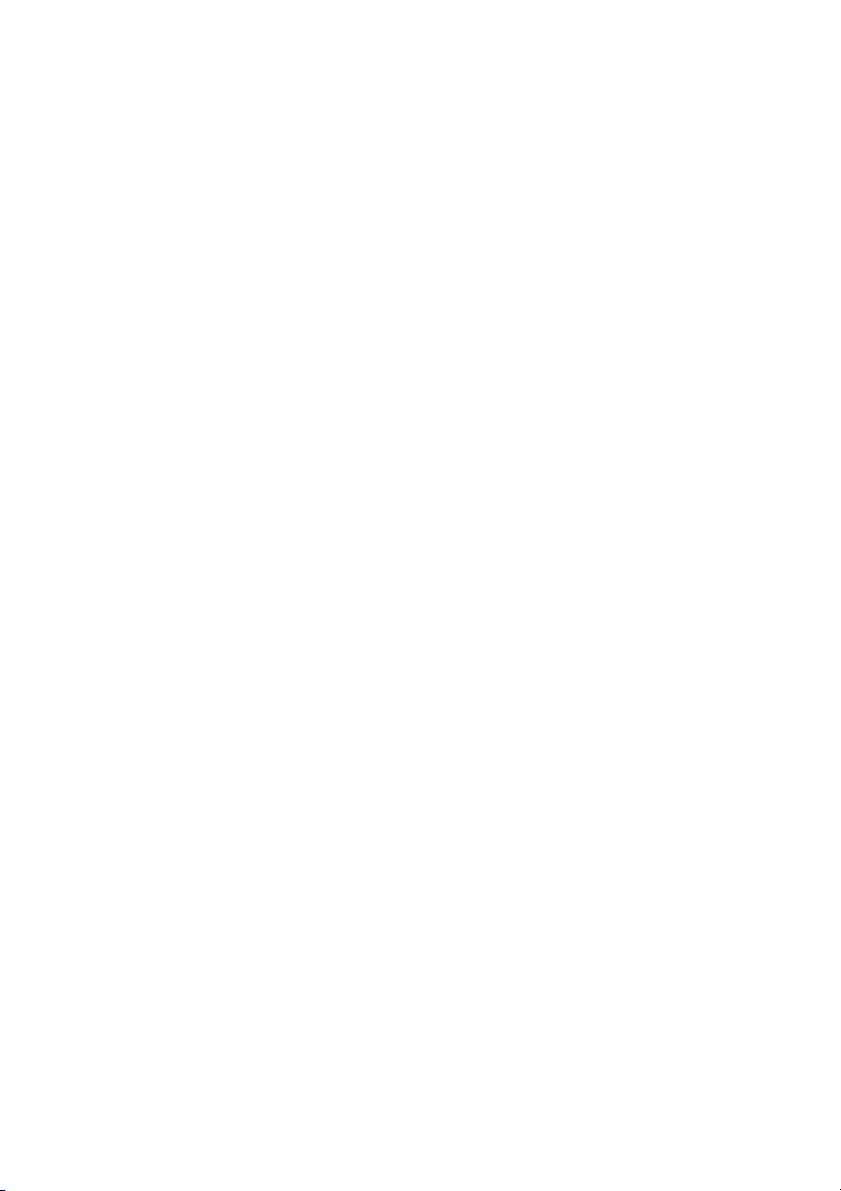
Thiết kế mạch điều khiển có chức năng thực hiện điều khiển đóng ngắt thiết bị điện t ự độ g n t ô
h ng qua các cảm biến DHT11 (cảm biến nhiệt độ v à độ ẩm).
Hệ thống được thiết kế gồm 5 khối: Khối thu gồ m cả
m biến nhiệt độ và độ ẩm DHT11 Khối x
ử lý trung tâm sử dụng PIC 16 8 F 77A.
Khối hiển thị sử dụn g LCD Khối điều khiển thi t ế bị s ử dụng Rela
y 5VDC để đóng/ cắt thiết bị. Khối th i ờ i g an thực (h n ẹ giờ)
Sơ đồ khối của mạch Khối thu s ử dụng cảm biến DHT11 Khối điều khiển Khối xử l ý thiết bị trung tâm Khối th i ờ i g an Khối thực hiển t hị Hình 2 . 1
. Sơ đồ khối của mạch. 10
Chức năng của từng khối: Khối xử lý tru g n tâ : m Vi điều khi n ể PIC 16F 7 8 7A điều khi n ể toàn bộ hoạt động của mạch à
l nhận dữ liệu giải mã tín hiệu nhiệt đ ộ và độ ẩ . m
Đưa hiển thị lên các LC
D sau đó đưa ra tín hiệu điều khiển bật /tắt
(hẹn giờ bật /tắt) thi t ế bị đi n ệ .
Khối hiển th :ị Là cá c LCD 2 dòng 6
1 kí tự để hiển thị nhiệt đ ộ và độ
ẩm môi trường, thời gian.
Khối nguồn nuôi: Là khối cơ bản nhất nó u c g n cấp ò d g n nuôi c o h o t àn bộ li h n ki n ệ t o r g n mạch. ó
N tạo ra điện áp ổn đị h n thoả mãn các chỉ số về điện p á v à d ò g n .( ù D g n sạc pin điện th ạ o i 5V ) Khối b t ậ tắt t hi t ế bị i đ ệ :
n Là khối sử dụng Relay 5 V DC để đó g n /ngắt mạch h
oạt động của các thiết bị điện khối nà y nhận tín hiệu t ừ VĐK PIC 16F877A 2 1
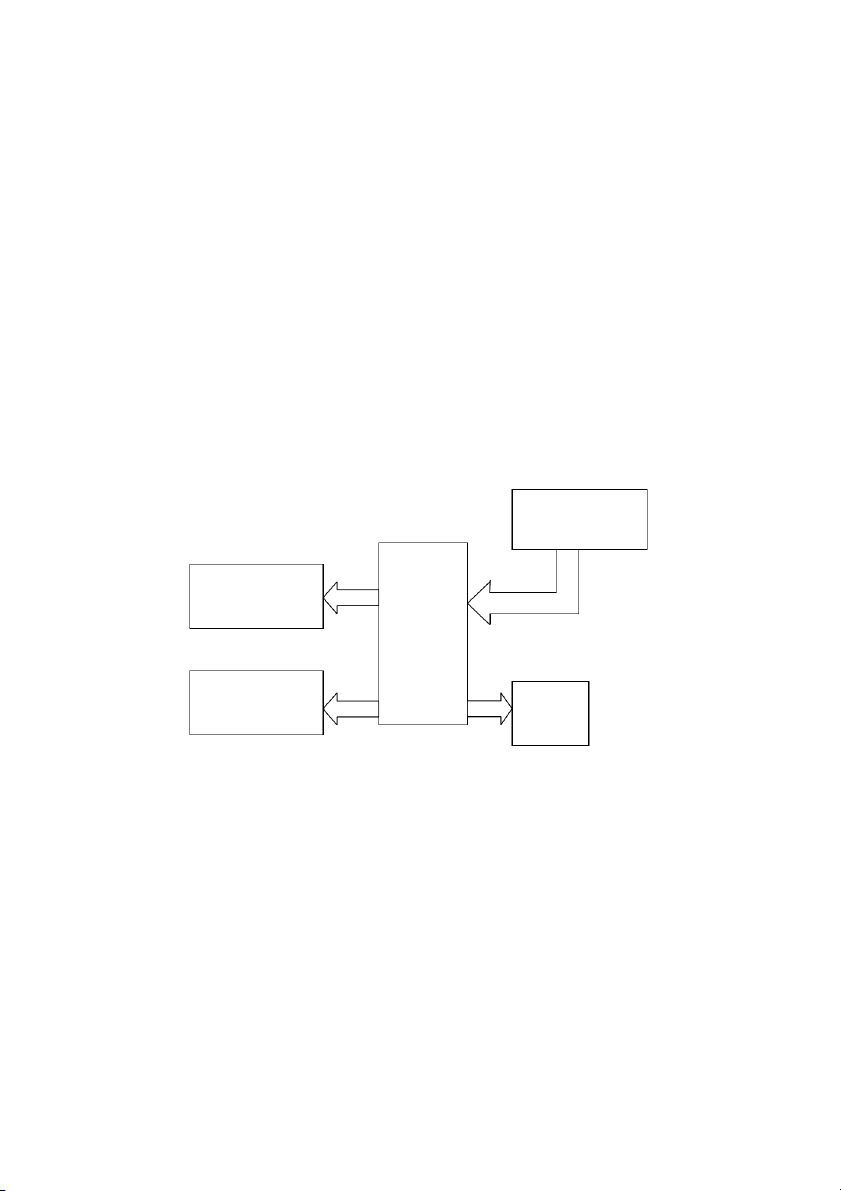
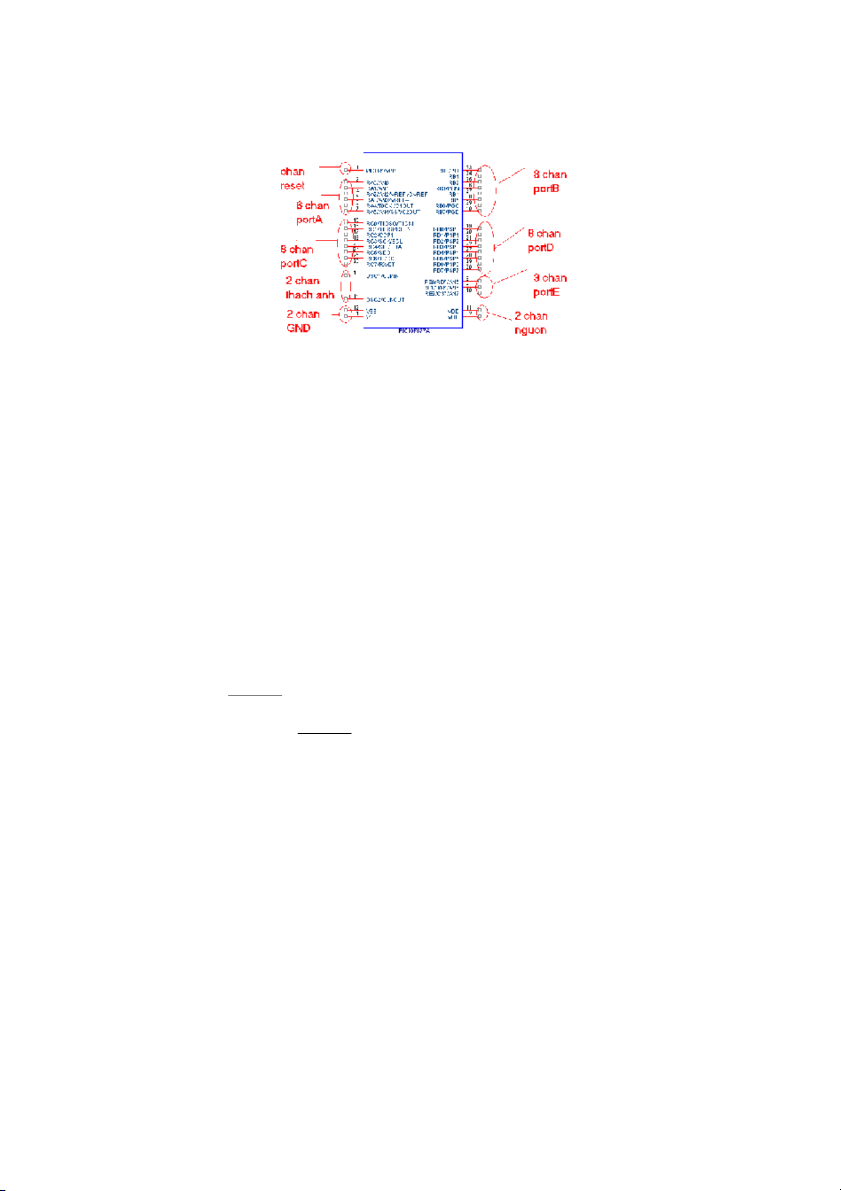
. . Vi điều khiển Pic 16F8 7 7 A. 2 1 . 1 . . Sơ đồ chân à v sơ đồ ng y u ên lý c a ủ PIC16 8 F 7 7 A Hình 2 . 2 .Sơ đồ chân c a ủ PIC 1 6F877A. 11 Hình 2 . 3 . Sơ đồ n guyên lý 2 1 . 2
. . Cấu trúc vi điều khiển PIC16F877A
Sơ đồ chân và sơ đồ nguyên lý của PI 1 C 6F877A được trì h n b y à trên Hình 2.3
và với các đặc điểm cơ bản nh ư sau :
- PIC16F877A có tất cả 40 chân Chức năng các c hân VĐK: Ch n â OS 1 C C / LK1( 3 1 ): Ngõ v o
à kết nối với dao độ g n thạch an h hoặc ngõ v o à nh n ậ u x g n clock từ b n ê n o g ài. Ch n â OS 2 C C / LK0( 4 1 ): Ngõ ra dao độ g n thạc h anh hoặc ngõ cấp u x ng cl c o k. Chân MCLR /Vpp 1 ( ) ó C 2 chức nă g n : MCLR : Ngõ v o
à reset tích cực ở mức thấp. Vpp: Ngõ v o à nhận điện p á l p ậ trình khi l p ậ t ì r h n cho p ic. Chân RA0/ N A 0(2), RA1/AN1 3
( ), RA2/AN2 có 2 chức năng:
RA0, 1, 2: Ngõ vào xuất/nhập số.
AN0, 1, 2: Ngõ vào tương t ự của kê h n 0 , 1, 2. 12 Chân RA2/AN2/VREF-/ R
V EF+(4): xuất nhập số/ n õ g vào tương tự kênh
thứ 2/ ngõ vào điện áp chuẩn th p ấ bộ AD/ n õ g vào điện p á chuẩn cao bộ AD.
Chân RA3/AN3/VREF+(5): xuất nhập số/ ng õ và o kênh tươn g tự 3/ ngõ vào điện p á chuẩn(cao) của bộ A . D Chân RA4/T C O K1 C / 1OUT(6): xuất nh p ậ số/ ngõ v o à u x g n c o l k c b n ê n o g ài cho I T MER0/ n gõ a r bộ so sánh 1.
Chân RA5/AN4/ SS /C2OUT(7): xuất nh p ậ số/ n õ g vào tương tự kênh 4/ n õ
g vào lựa chọn SPI phụ/ ngõ ra bộ o s sánh 2 . Chân RB0/IN (
T 33) :xuất nhập số/ ngõ v o à tín hiệu ngắt n o g ài. Chân RB1( 4
3 ), RB2(35): xuất nhập số.
Chân RB3/PGM(36): xuất nhập số/ cho ph p
é lập trính điện áp thấp ICSP. Chân RB4( 7
3 ), RB5(38): xuất nhập số. Chân B R 6/P C G (3 )
9 : xuất nhập số/ mạch gỡ rối và xung clock lập trình ICSP.
Chân RB7/PGD(40): xuất nhập số/ mạch gỡ rối và dữ liệu lập trì h n ICSP. Chân RC0/ 1 T C
O O/T1CKI(15): xuất nhập số/ ngõ vào dao độ g n i T mer1/ n õ g vào u x g n c o l k c bên n o g ài Timer1. Chân RC1/T1OS / I CCP2 1
( 6): xuất nhập số/ ngõ vào bộ dao độ g n Timer1/ n õ g vào cap u t r 2 e , n õ g ra o c p m are2, ngõ ra PWM2. Chân C R 2/CCP1 1 ( 7): xuất nhập số/ n õ g v o à Capture1 , ngõ ra Co p m are1, n õ g ra PW 1 N . Chân C R 3/SC / K SCL(18 : ) xuất nhập số/ n õ g vào xung l c ock nối tiếp đồng bộ, n õ g ra chế độ SPI/ ngõ v o à xung c o l ck đồ g
n bộ, ngõ ra chế độ I2C. Chân RC4/SDI S / DA(23 : ) xuất nhập số/ d ữ liệu v o à SPI/ xuất nhập I2C.
Chân RC5/SDO(24): xuất nhập số/ d ữ liệu ra SPI. 13 Chân C R 6/T /
X CK(25): xuất nhập số/ truyền bất đồng bộ USART/ xung đồng bộ USAR . T
Chân RC7/RX/DT(26): xuất nhập số/ nhận bất đồng bộ USAR . T
Chân RD0 7/PSP0 7(19 30): xuất nhập số/ d ữ liệu port song so g n .
Chân RE0/ RD /AN5(8): xuất nhập số/ điều khi n ể port so g n song/ ngõ vào tương tự kênh 5. Chân RE1/ WR /AN6( )
9 : xuất nhập số/ điều khi n ể ghi port song song/ ngõ v o à tương tự k ê h n 6 . Chân RE2/ CS /AN7(10 :
) xuấ t nhập số/ chân chọn lựa điều khiển port
song song/ ngõ vào tương tự kênh 7. Ch n
â VDD(11, 32) và VSS(12, 31): là chân nguồn của Pic.
- 40 chân trên được chia thành 5 PORT, 2 chân cấp nguồn, 2 h c n â GND ,2 chân thạch a h n v
à một chân dùng để RESE T vi điều k hi n ể . - 5 o p rt của PIC 6 1 8 F 7 7 A b o a gồm : + PORTB : 8 chân + PORTD : 8 chân + PORTC : 8 chân + PORTA : 6 chân + PORT E : 3 chân 14 * Khái u q át về chức nă g n c a ủ á
c c port trong vi điều khiển PIC16F877A PORTA: PORTA gồm có 6 ch n â . Các ch n
â của PortA , có thể thực hiện được chức năng
“hai chiều” : xuất dữ liệu từ vi điều khiển ra ngoại vi và nhập dữ liệu từ ngoại vi v o à vi điều khiển.
Việc xuất nhập dữ liệu ở PIC16 8 F 77
A khác với họ 8051. Ở tất cả các PORT của PIC16 8
F 77A, ở mỗi thời điểm chỉ thực hiện được một chức năng: Xuất hoặc n ậ h p.
Để chuyển từ chức năng này nhập qua chức năng xuất hay ngược lại, ta phải xử lý bằng phần mềm, kh n ô g như 8051 tự hiể
u lúc nào là chức năng nhập, lúc n o à là chức năng xuất. Tro g n kiến t ú r c ph n ầ cứng của PIC16 8
F 77A, người ta sử dụng h t anh ghi TRISA ở
địa chỉ 85H để điều khi n ể chức năng I/ O tr n ê . Muốn xác lập các h c n â n o à của
PORTA là nhập (input) thì ta “ set bit ’’ tương ứng chân đó tron g thanh ghi TRISA. Ngư c ợ lại, muốn chân n o à là output thì ta
“ clear bit ’’ tương ứng chân đó trong thanh g i h TRISA. i Đ ều n ày ho n à o t n à tương tự đ i ố v i ớ các PORT còn lại Ngoài ra, PORT A còn có c ác c hức năng quan trọ g n sau :
- Ngõ vào Analog của bộ ADC: thực hiện chức năng h c uyển từ Anal g o sang Digital. - Ngõ vào điện thế s o sánh
- Ngõ vào xung Clock của Timer0 trong kiến trúc phần cứng : thực hiện các n hiệm vụ đếm xu g n h t ô g n u q a Timer0…
- Ngõ vào của bộ giao tiếp MSSP (Master Synchronous Serial Por ) t . 15 PORTB:
PORTB có 8 chân. Cũng như PORTA ,các c â h n POR B
T cũng thực hiện được 2
chức năng: input và output. Hai chức năng trên được điều h k iển bới tha h n ghi TRISB. Khi muốn chân n o à của POR B T là input t ì h ta set b t i tương ứng trong
thanh ghi TRISB , ngược lại muốn h c n â nào là ou p t ut thì ta c e l ar bit tương ứng trong TRISB. Tha h n h
g i TRISB còn được tích hợp bộ điện trở k o é lên có thể i đ ều khiển được bằng chương trình. PORTC:
PORTC có 8 chân và cũng thực hiện được 2 chức năng i p n ut và ou p t ut dưới sự điều k hi n ể của h t anh g hi TRISC tươ g n tự như h ai t a h h n ghi tr n ê . Ngoài ra POR C T cò
n có các chức năng quan trọng sau:
- Ngõ vào xung clock cho Timer1 trong kiến t ú r c phần cứng.
- Bộ PWM thực hiện chức năng điều xung lập trình được tần số, dut y cycle: sử dụng t o r ng điều k hi n ể tốc độ v à vị t í r của động cơ v v . ….
- Tích hợp các bộ giao tiếp nối tiếp I2C, SPI, SSP, USART. PORTD:
PORTD có 8 chân. Thanh ghi TRISD điều khiển 2 chức năng n i put và ou p t ut của
PORTD tương tự như trên .PORTD cũng là cổng xuất dữ liệu của chuẩn gi o a tiếp
song song PSP (Parallel Slave Port). 16 PORTE:
PORTE có 3 chân. Thanh ghi điều khiển xuất nhập tương ứng là TRISE. Các chân
của PORTE có ngõ vào analog. Bên cạnh đó PORT E còn là các h c ân đi u ề khiển của chuẩn g iao tiếp PSP. 2 1 . 3 . . á C c bộ timer c a ủ 6 1 F8 7 7 A
Bộ vi điều khiển PIC16F877 A có 3 bộ Timer đó l : à Timer0 , Timer1, Timer2.
* Bộ Timer 0: Là bộ định thời h oặc bộ đếm c
ó những ưu điểm nổi ậ b t sau:
+ 8 bit cho timer hoặc bộ đế . m
+ Có khả năng đọc và viết.
+ Có thể dùng đồng hồ b n ê trong hoặc bên ngoài. + Có thể chọ
n cạnh xung của xung đồng hồ.
+ Có hệ số chia cho xung đầu vào có thể lập trì h n lại bằng phần mềm. + Ngắt tràn.
* Bộ Timer 1: Bộ Timer1 có thể là bộ đếm hoặc bộ định thời với ưu điểm sau:
+ 16 bít cho bộ đếm hoặc bộ định thời (g m
ồ hai thanh ghi MR1H:TMR1L).
+ Có khả năng đọc và viết.
+ Có thể chọn xung đồng hồ bên trong hoặc đồng hồ bên ngoài.
+ Có thể ngắt khi tràn FFFFh về 0000h.
Nó có thể hoạt động ở một t rong c c á chế độ sau:
+ Là 1 bộ định thời 16 bit.
+ Là một bộ đếm có đồng bộ. 17 + Là một bộ đếm kh n ô g có đồng bộ.
* Bộ Timer 2: Bộ Timer2 có những đặc tính sau đây:
+ 8 bít cho bộ định thời ( thanh ghi TMR2 ).
+ 8 bít vòng lặp ( thanh ghi PR2 ).
+ Có khả năng đọc và viết ở cả hai thanh ghi nói trên.
+ Có khả năng lập trình bằng phần mềm t ỷ lệ trước.
+ Có khả năng lập trình bằng phần mềm t ỷ lệ sau.
Hoạt động của bộ Timer2: timer 2 được dùng c ủ
h yếu ở phần điều chế xu g
n của bộ CCP, thanh ghi TMR2 có khả năng đọc và viết, nó ó c thể xóa bằng
việc reset lại thiết bị. Đầu v o
à của xung có thể chọn á
c c tỷ lệ sau: 1:1 ,1:4 hoặc 1: 6 1 việc ch n
ọ các tỷ này có thể điều khiển các bít sau T2CKP 1 S và bit T2CKPS0. 2 2 . . Cảm biến DH 1 T 1
- DHT11 là cảm biến nhiệt độ và độ ẩm. Nó ra đời sau và được s ử dụng thay thế cho d n ò g SHT1x ở n hững nơi kh n
ô g cần độ chính xác cao về h n iệt độ và độ ẩm. Hình 2 . 4 .Cảm biến D HT11
- DHT11 có cấu tạo 4 chân như hình. Nó s
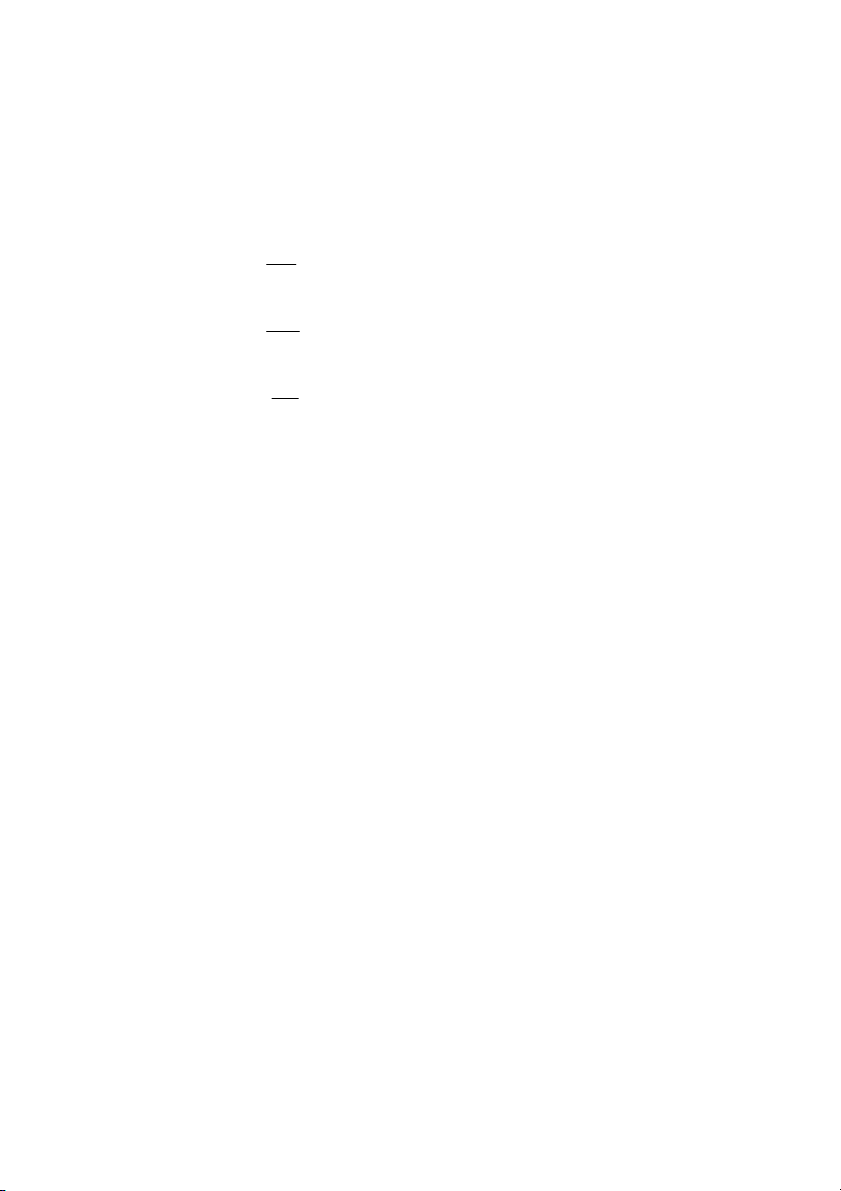
ử dụng giao tiếp số theo chuẩn 1 d ây. 18 Hình 2 . 5 . Sơ đồ k t ế nối v i ớ VĐK Nguyên ý l hoạt độn :
g Để có thể giao tiếp với DHT11 th o e chuẩn 1 chân i v xử lý thực hiện th o e 2 bước: - Bước 1: gửi tín hiệu Start + MCU thiết lập h c n â DAT A là Outp t u , k o é h c ân DAT A xuống 0 tro g n kho n ả g
thời gian >18ms .Khi đó DHT11 sẽ hiể u MC
U muốn đo giá trị nhiệt độ và đ ộ ẩm.
+ MCU đưa chân DATA lên 1, sau đó thiết lập lại là chân đầu vào. +Sau khoả g n 0 2 - 0 4 us, DHT11 sẽ kéo c â h n DAT A xuống thấp. Nếu > 0 4 us mà ch n â DAT A không đư c ợ k o
é xuống thấp nghĩa là không g a i o tiếp đư c ợ với DHT11.
+ Chân DATA sẽ ở mức thấp 80us sau đó nó được DHT11 k o é nên cao t o r ng 80us. Bằng việc giá m sát c â h n DATA ,MCU có thể b ế
i t được có giao tiếp được với DHT11 o
k . Nếu tín hiệu đo được DHT11 lên cao, khi đó hoàn th ệ i n u q á trình giao ti p ế của MC U với DHT. - Bước 2: đọc giá trị trên DHT11
+ DHT11 sẽ trả giá trị nhiệt độ và độ ẩm ề v dưới dạng 5 byte 19 + Đọc d ữ liệu: Sau khi gi o a tiếp đư c
ợ với DHT11, DHT11 sẽ gửi liên tiếp 40 bit 0 hoặc 1 về MCU, tương ứng c h a i t à h nh 5 b
yte kết quả của Nhiệt đ ộ và độ ẩm. Sử dụng màn hì h n t n i h thể lỏng LC
D loại 2 dòng, 16 kí tự LCD16 2 0 .Màn hì h
n LCD đã rất phổ biến tr n
ê thị trường và việc lập t ì r h n ch o nó rất đơn giản thêm vào đó à
l nó có mặt thẩm mĩ rất cao. Sử dụng nguồn nuôi thấp (từ 2, 5 đến
5V). Có thể hoạt động ở h ai chế độ 4 b it h oặc 8 b it Hình 2
. 6. Sơ đồ nguyên lý kết nối ủ c a LC 1 D 6 2 0 tro g n ạ m ch điện
LCD1602 được ghép nối với v
i điều khiển thông qua PortD ( RD0 đến R 7 D h K ông
sử dụng RD3). RD0 nối với chân E, RD1 nối với chân RS, RD2 nối v i ớ chân R/W
là chân đọc ghi dữ liệu và chân RD4 đến R 7 D là h c n â d ữ li u ệ v o à . Trong đó: - VSS là c hân nối đ t ấ - VEE chân chọn độ tư n ơ g p hản, ch n â n ày được c họn q ua 1 biến trở 5 K một đầu
nối VCC, một đầu nối mát. - Ch n â VDD nối dươ g n nguồn - Ch n â chọn h
t anh ghi RS (Register Select): có hai tha h n ghi t o r g n C L D. 20
+ Nếu RS=0 ở chế độ ghi lệnh như xóa màn hình,bật tắt con trỏ. . . + Nếu RS =1 ở chế đ ộ ghi d ữ liệu nh
ư hiển. thị kí tự, chữ số lên màn hình. - Chân đọc/ ghi R ( /W): Đầu v ào đọ / c g i h cho phép ngư i
ờ dùng ghi t hông t in lên LCD khi R/ W = 0 hoặc đọc thô g n tin L CD khi R /W = 1. - Ch n â c o h ph p é E (Enable): h C n â cho p hép E được s ử dụ g n bởi C L D để chốt d ữ liệu của nó. Khi d ữ liệu được đến h c n â dữ liệu thì c n ầ có 1 x n u g từ mức c ao
xuống mức thấp ở chân này để LC
D chốt dữ liệu , xung nà y phải có độ ộ r ng tối thiểu 450ns. - Ch n â 0 D – D7: Đây là 8 chân dữ liệu 8
bít, được dùng để gửi thô g n tin l ên
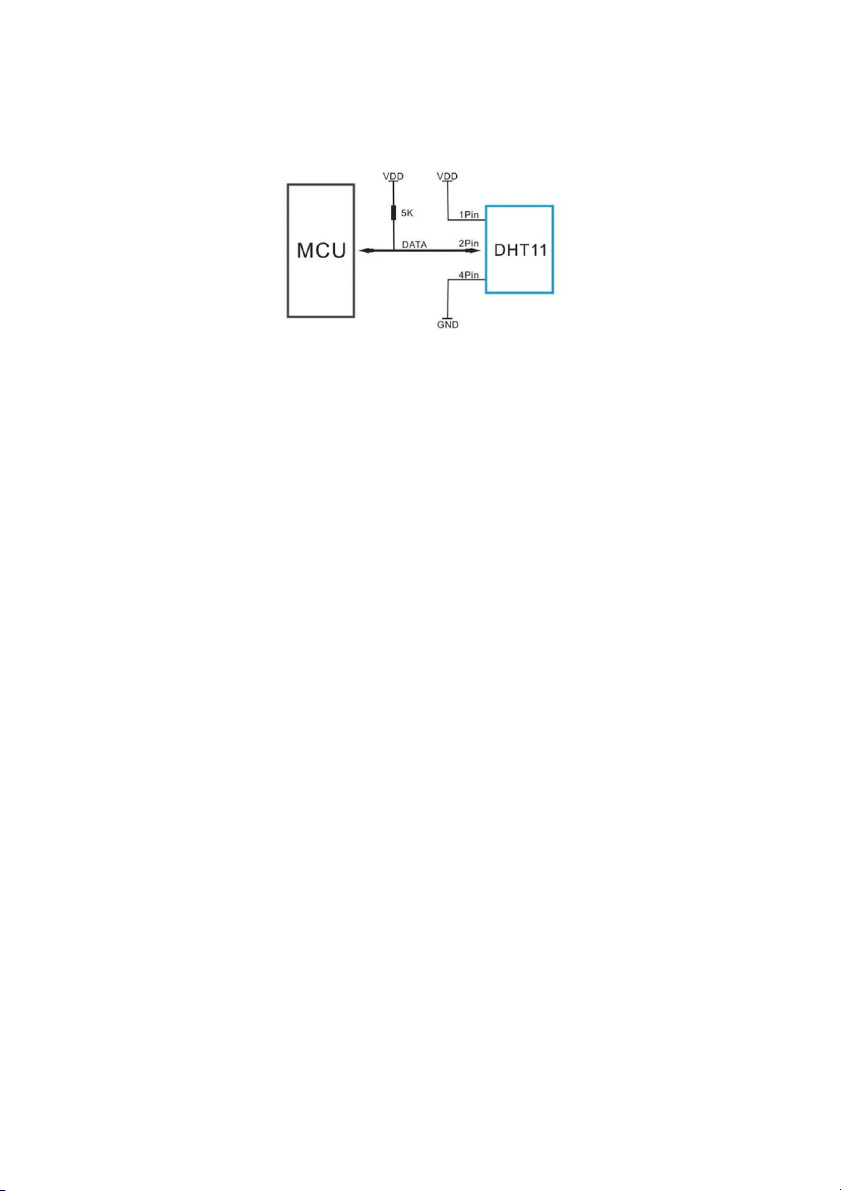
LCD hoặc đọc nội dung của á c c thanh ghi tro g n LC . D 2 4 . . Rơle đó g n ngắt thiết b ị Hình 2 . 7 . R l e ay 5 V và s ơ đồ các chân Khối điều khiển thi t
ế bị điện sử dụng Relay để đóng/ ngắt mạch điện khối công suất này n
hận lệnh điều khiển từ VĐ K PIC 16F 7 8 7A. ( S ử dụng điện áp thấp đống mở điện p á c o a ) 2 5 . . T ụ điện
Tụ điện là linh kiện điện tử thụ động được s ử dụ g n rộ g n rãi t o r g n các ạ m ch
điện tử, chúng được sử ụ d ng trong các mạch ọ l c nguồn, ọ
l c nhiễu,mạch truyền tín hiệu, mạch tạo d ao động. v v… ó C tác d n ụ g n p ạ ả
x điện, ổn định điện áp đầu ra. 21 2.6.Đ o i t Hình 2 . 8. Điot Là c ác linh kiện điện t ử thụ động, cho p h p
é dòng điện đi qua nó th o e một chiều mà không th o e c hiều ngư c ợ lại, s ử dụng c c á tính c hất của c ác chất á b n d n ẫ . 2 7 . . Điện trở
Khống chế dòng điện qua tải c o h p ù h h p ợ .
Trị số điện trở : cho biết mức độ cản trở dòng điện của điện trở. Đơn vị đo là Ô m (Ω).
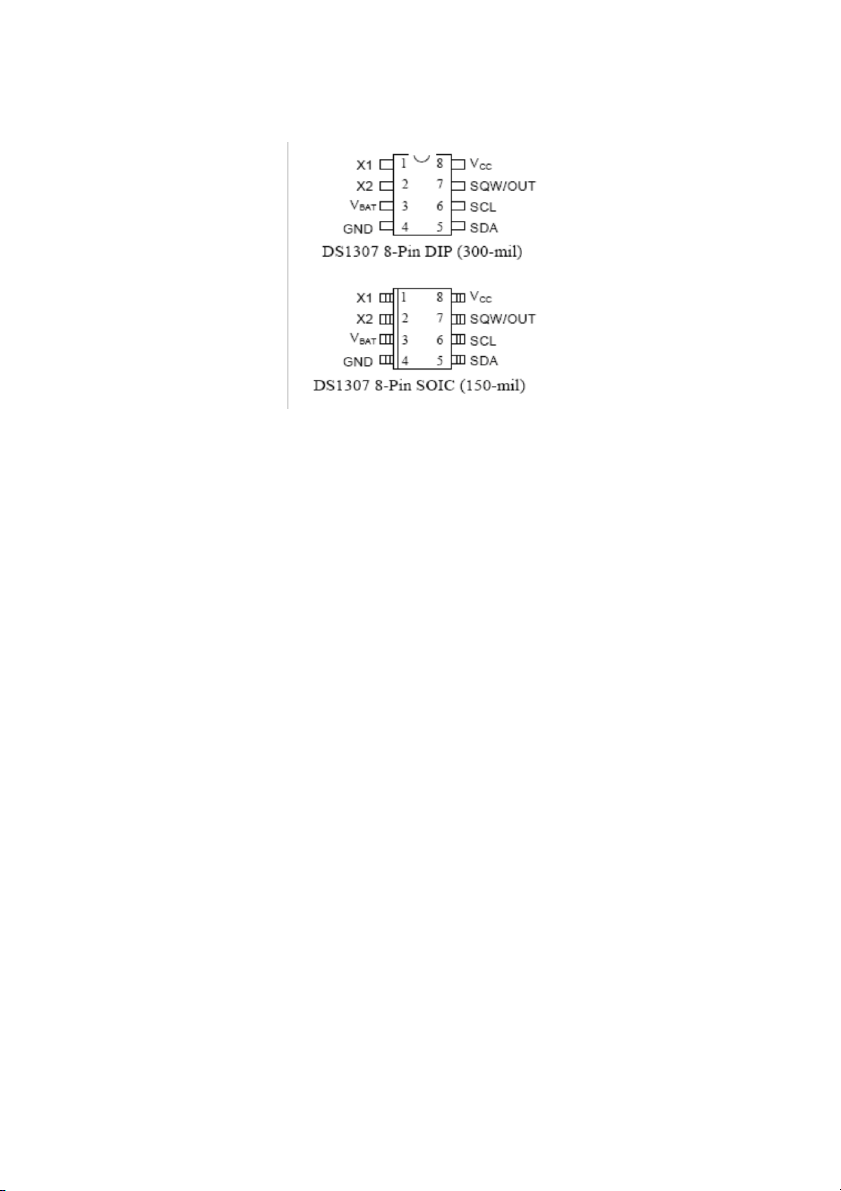
Điện trở thường được ký hiệu bằ g n 4 v ò g n mầu , điện trở h c í h n x ác thì ký hiệu bằ g n 5 ò v g n mầu. 2 8 . . Thời g a i n thực S D 1307 DS 1307 là ch p i thời gian thực ha y R C T ( Read time clock). Đâ y là một IC í t ch hợp c o h thời gi n a bởi vì tính chí h n x
ác về thời gian tuyệt đối ch o thời i g an: Thứ, ngà , y tháng, nă , m giờ, phút, giâ . y 22 Hình 2 . 9 . Sơ đồ các c hân của D S1307 Các ch n
â của nó được mô tả nh ư sau: - X1 và X2 là đầu v o à d ao độ g n cho D 1 S 3 7 0 . Cần d ao động thạ h c anh 32.7 8 6 h K z.
- Vbat là nguồn nuôi cho chip. Nguồn này t
ừ 2V-3,5V. Đây là nguồn cho chip hoạt động liên tục k hi không ó c n guồn Vcc mà DS 1307 v n ẫ h oạt đ n ộ g h t eo thời g ian.
- Vcc là nguồn cho giao tiếp I2C. Điện áp cung cấp là 5V chuẩn và được dung chung với vi xử ý l . Nếu à m c V c kh n ô g có à m Vbat c ó t ì h DS1307 vẫn hoạt động b ình thườ g n n hưng mà k hông g hi và đọc d ữ liệu.
- GND là nguồn mass chung cho cả Vcc và Vbat
- SQW/OUT là một ngõ ra p ụ
h tạo xung dao động (xung vu n ô g). Ch n â n ày không ảnh hư n ở g đến thời g ian thực n ên k hông sử dụng chân n ày trong thời gian t hực và bỏ tr n ố g c h n â n ày. - SCL và SDA là 2 b us d ữ liệu của DS 1307. 23
Ghép nối DS1307 với vi điều h k iển Việc gh p
é nối nó với vi điều k hi n ể h k á đơn giản v à th o e datasheet thì tôi đưa r a sơ đồ sau: DS1307 ó n chỉ gi o
a t iếp với vi điều khiển với 2 đường truyền SCL v à SDA n ên do đó tr n
ê vi xử lý cần phải xác định chân n o à trên v i xử lý nó có SC L và SDA để ố n i với DS 3 1 7 0 . 24 CHƯƠNG 3: THI T Ế KẾ HỆ TH ỐNG TƯỚI CÂY 3 1 . . X y â dự g n bài t á o n c o h hệ thống Hệ thống tưới câ y t
ự động đã và đang được ứng dụng rộng rãi. Việc tưới câ y tự động sẽ là
m tăng hiệu quả canh tác như: giả m thời i g an lao
động, tiết kiệm nước, tăng năng suất cho câ y trồng, u
T y nhiên để đạt được hiệu quả cao nhất cần tí h
n toán kĩ về đặc tính câ y trồng cũng n hư điều ki n ệ ù v g n . Một hệ thống tư i ớ câ y t ự động b o a gồm:
- Nguồn nước cấp cho hệ thống.
- Máy bơm nước, các van điện từ.
- Hệ thống đường ống chính và p hụ. -Các đầu p h n u tưới ( ó
c hoặc không tùy vào phương ph p á tưới ). -Bộ điều khi n ể t ự động đó g n ngắt má y bơ m hoặc các v an điện từ. Đề ra phương á
n cho hệ thống tưới t ự động Phương án để r a quyết đ n
ị h đóng mở hệ thống tưới n hư sau: + Độ ẩm > 90
% thì hệ thống không hoạt động.
+ Độ ẩm 85-90% tưới 10 phút
+ Độ ẩm 80-84% tưới 15 phút
+Độ ẩm 75-79% tưới 20 phút + Độ ẩm < 74 % tưới 25 ph t ú . 25 Các phư n ơ g án lựa chọn t ê r n ó c thể t a
h y đổi được tùy theo vùng miền ,loại cây, mùa và thời tiết.
Thiết kế bộ hẹn giờ tự động, đến giờ cài đặt hệ thống hoạt động, bơm được bật l n ê v à ù
t y thuộc vào khoảng độ ẩm và quyết định đến thời gian đó g n bơm.
3.2. Thiết kế phần cơ Các phươn g ph p
á tưới có dùng ống đ u ề có cùng ngu ê y n ý l tí h n to n á tr n ê cơ sở môn học cấp t o h át nước à
v thủy lực đường ống. Đó l : à á
X c định diện tích tưới, nguồn nước, n u h cầu nước tưới p ù h h p ợ với từ g n loại cây trồ g
n , diện tích, địa hình vù g
n tưới.Từ các t hông số này, ta sẽ t í h n o t án đườ g n kính ống h c í h n , n ố g phụ, ống nhá h
n , vận tốc nước chảy trong ố g
n ,áp lực nước trong ốn ; g tính to n á chiều dài
của các loại ống, các chi tiết nối (co ,tê, v n
a , lơi vv...), số lượng các bét phun , é b t
đế chân, ống dẫn đến gốc vv.. à v cuối cùn
g là lập bảng tổng hợp số lượng các loại vật tư, t ính toán c í
h ít mua vật tư, tiền công xây lắp vv..
3.2.1. Xác định lần tưới nhu cầu nước/lần tưới và khả năn g cung cấp nước Tùy thuộc mỗi loại câ y trồng, ta xác đ n
ị h lần tưới, nhu cầu nước cho mỗi lần tư i ớ . Số lần tưới ph
ụ thuộc vào đặc tính của loài cây trồng và khả năng giữa ẩm của đất. Ta chỉ cần tí h n toán gần đúng thô g
n số về lần tưới dùng để tính to n á nguồn nước.Tro g
n sản xuất, sẽ dựa vào th c ự tế đất đai, th i
ờ tiết để điều chỉnh số lần tưới cho p hù hợp.
Nhu cầu nước/lần tưới là thông số quan t ọ
r ng để tính toán, thiết kế hệ thống tưới và í
t nh toán nguồn nước.Trong thực tế, n u
h cầu nước của cây trồng ít hơn nhi u ề o
s với lượng nước ta cung cấp, o
d vậy mà lượng nước tưới tù y thuộc vào phương h p p
á tưới.Thông thường n u
h cầu nước tưới cho một câ y lâu năm/lần tưới 26 giao động từ 5- 0
1 lít (tưới nhỏ giọt); 15 2 -
0 lít (tưới phun tia) 30 đến 40 lít nước (tưới ã r nh, tưới p hun m a ư ). 3 2 . 2 . . Phân ch a i khu tưới
Nếu chỉ tưới cho diện tích nhỏ thì là 1 k u
h tưới, nhưng nếu diện tích tưới lớn hơn phải h p n â chia vù g
n tưới thành nhiều khu tưới. Nếu chi a k u h tưới quá lớn, công suất má y bơ m và đườ g
n kính ống dẫn nước chí h
n sẽ tăng lên rất lớn dẫn đến không ó c hiệu quả k inh tế.Cá h
c tốt nhất là tưới lần lượt từ g n k u h tưới. Khi ph n
â chia khu tưới, phải lên bản vẽ thể hiện r õ hìn h dáng, diệ n tích từng k u h tưới, í k h c thước các cạ h n của k u h tưới, vẽ các hà g n cây và chiều d ài mỗi hàng
cây, từ đây ta sẽ tính được số lượng câ y trồ g n t o r g n mỗi khu tưới, í t nh ra đường kí h n , chi u ề d
ài của đường ống chí h n .
3.2.3. Tính toán đường ống chính Đường ống h c í h
n tải nước tưới đến từng h k u tưới và cho cả v n ù g tưới, do đó, ta phải í
t nh toán được chiều d i à và đường í
k nh ống phù hợp và cả áp lực để chọn loại ống p hù h p
ợ (lớn quá sinh thừa tốn ti n ề , ố g n n ỏ h quá kh n ô g cung cấp đủ nước cho k
hu tưới, ống dởm quá sẽ bị xé vỡ gâ y tốn kém...) . Ngoài ra ,ta cần t n í h vị t í
r lắp đặt đường ống chính và chuyển họa nó lên b n
ả vẽ. Thông thường nếu k u h tưới có địa hì h
n thấp dần thì ta bố trí đường ống chính đi th o e cạnh ó
c cao độ lớn nhất của khu tưới, nhờ đó khi xả nước ra khỏi
đường ống chính, nước sẽ có khu n
y h hướng chảy từ nơi cao đến nơi thấp. Như
vậy sẽ có lợi về nă g n lượ g n .
Nếu đất tương đối bằng ph n ẳ g hoặc gợn ó s g n n ô h cao ở giữa thì n n ê bố trí
đường ống chạy dọc theo các đỉnh cao xuyên qu a vùng đất để ch a i nước tưới về hai phía. 27
+ Tính chiều dài đường ống h c í h n : Dù g
n thước kẻ ly đo tổng chiều dài đường ống h c í h n tr n ê bản vẽ, nhân với
tỷ lệ bản vẽ để xác định tổng chiều dài thực của đường ống chính.( Sử dụng máy vi tính và p hần mềm Au o t CA D hoặc c ác phần ề m m chu ê y n).
+ Tính toán đường kính của đường ống h c n í h:
Để tính toán được kí h c thư c
ớ của đường ống chính ta cần xác định tổng nhu
cầu nước tưới cho một l n ầ tưới cho k u h tưới l n
ớ nhất của vùng tưới. Tro g n g n à h n nước có công th c ứ thô g
n dụng để tính toán đường kính ống như sau: Q=S.v Với : Q lưu lượ g n d òng nước chả y qua ống (m3/s). S: tiết diện đư n
ờ g ống = R2 *Pi (R l à bán kính đường ống, Pi=3,1 1 4 6) v: Vận tốc nước chả y trong ống (m/s). Vận tốc nước chả y trong ống th o e u
q y phạm không được vượt quá 3m/s vận
tốc nước chảy trong ống quá lớn sẽ xé vở đường ống, nhưng vận tốc nước chảy quá nhỏ thì đườ g
n kính ống phải lớn gây tốn kém), tro g n hệ thống tưới nông nghiệp ta thườ g
n chọn vận tốc chảy trong ống từ 0,5 đến 1 m/s.Vận tốc kinh
nghiệm thường áp dụng là 1 m/s. Nhìn chu g
n , quan hệ giữa đường kính ống, vận tốc nước chảy trong ố g n và
thời gian tưới là bài to n á i
k nh tế, người thiết kế phải cân nhắc a s o cho lợi ích kinh
tế mang lại là tối ưu nhất. 28
+ Xác định công suất và chọn máy bơm:
Các máy bơm thông thường 1 5 , HP thườ g n có cô g n suất (ghi trên nh n ã ) là
từ 15-36 m3/giờ. Nhìn chung, loại máy bơm có cù g
n công suất tiêu thụ điện năng, n u ế cô g
n suất bơm thấp thì có khả năng đưa nư c ớ ê l n a c o h n ơ à v ngư c ợ lại. Căn cứ v o
à chiều cao cột nước (tính từ đáy giếng hoặc đáy hồ - nơi đặt đầu Pin, đến nơi nước bơ m lên cao nhất ) để ch n ọ loại má y bơ m phù h p ợ . Như bài to n
á cụ thể trên đây, nếu cột nước <5 m ,ta có thể chọn máy bơm loại 1 5 , HP ; ô c g n su t ấ tưới từ 25 3 - 5 m3/giờ là p ù
h hợp, vì khi sử dụng t o r ng thực tế, ta có thể i
đ ều chỉnh tăng, giảm thời gian tưới ch t
ú ít để trượng nước tưới đảm b o
ả yêu cầu của mình. Nếu cột nước tưới cao hơn và k u
h tưới không lớn ta chọn máy bơ m có cô g
n suất nhỏ hơn và ngược lại. 3 2 . 4 . . Tính t á o n đường ố g n n á
h nh, đường ống thứ ấ c p
Một đường ống chính sẽ có nhiều đường ống nh n
á h mỗi đường ống nhánh
xuất phát từ đường ống chí h
n mang nước tưới cho 1 vùng diện tích trong khu tưới. Tro g
n thiết kế, ta cần phân bổ vùng tưới của các đường ống nhánh gần bằng nhau để có đường ống nh n á h tương đối đ n
ồ g đều về đường kí h n .
Đường ống thứ cấp là đường ống đi xuyên u
q a sát hàng cây, mang nước tưới đến cho các câ y trồng có trong hàng. Các thô g n số cần tí h n o
t án đối với đường ống nhánh cũng là xác định chiều dài đường ố g n và đườ g n kính ố g n . Phươ g n h p p á tí h n o t n
á chiều dài đường ố g n và
đường kính ống cũng giống như tính toán ở trư n ờ g hợp đườ g n ống chính: Dùng thước kẻ ly đo c hiều d ài t rên bản vẽ r i ồ n â h n với t
ỷ lệ bản vẽ, tính t á o n đường kính ống bằng cá h
c xác định số cây cần tưới mà đường ống nhá h n đó phụ trá h c , từ đó 29
tính ra lưu lượng nước chảy trong ống, vận tốc nước chả
y trong ống vẫn chọn là 1 m/s. Tù y theo di n ệ tích mà ống h
n ánh đó tưới đến, ta sẽ tính ra đường ống nhánh
có các kích cỡ khác nhau .Sau đó, ta làm tr n ò số cho p ù h hợp với đường kí h n qui chuẩn ó c b án g n à o i thị trường ( á c c cở ốn g 16, 21, 27, 32 m m vv).
Việc đo vẽ, tính toán bằng phương h p p á thủ công chỉ n n ê áp dụng khi khu tưới có diện í t ch nhỏ và ì
h nh dáng khu đất tương đối đơn giản, ít ó g c cạnh (hình chữ nhật ,hì h n vuông ,hình t a
h ng vv...) .Đối với vùng tư i ớ có diện ítch l n ớ , để việc
tính toán được đảm bảo chính xác, t hông thư n ờ g t a ph i
ả sử dụng các phần mềm đồ
họa chuyên dùng để lập bản vẽ, xác định chiều dài của á c c tuyến ống và dùng
phần mềm excel để tính toán đường k ính ống chính, ống nh n á h và ố g n th ứ cấp. Tro g n g
n ành cấp thoát nước ,ngư i ờ ta cò n tí h n o t án a
h o hụt năng lượng dẫn
đến giảm áp lực nước do c c á co, cút, a
v n, chỗ ống cong..tác động v o à . u T y nhiên,
ở đây giản lược và bỏ qua nh n
ữ g tác động đó ,coi nh ư đâ
y là bà itoán gần đúng, và
thực tế có thể áp dụng t o
r ng việc thiết kế hệ thống tưới cỡ nhỏ mà không bị ảnh hưở g
n gì lớn và có thể tự điều chỉnh được (ví dụ: có thể tăng thời gian tưới
lên chút ít để bù vào sai số do í t nh toán). 3 2 . 5 . . Chọn phươ g n pháp tưới Nếu di n ệ tích k u
h tưới nhỏ, có thể k ô h g n dùng ố g n h n ánh mà gắn th n ẳ g ống phân phối v ào ống chính. Đối với phư n ơ g ph p
á tưới tràn, các ống nhá h
n 4 được thay bằng mương,
rãnh; các ống cấp 5 đư c ợ t a h y bằng mương th ứ cấp. Với các phương ph p á tưới n u ê trên, h t eo chúng t i ô , ngư i ờ nông dân rất hạn h p
ẹ về vốn đầu tư, đặc biệt là giai đoạn đầu khởi sự kiến thiết cơ bản, có h n à g 30 chục th
ứ phải chỉ tiêu ,do đó à
m chọn ra mô hình tưới n o
à phù hợp nhất ,vừa với t i ú tiền của c ủ
h đầu tư là điều cần su y xét ,tính o t án. S u a này, khi ó c thu hoạch, ta có thể cải ti n
ế , bổ sung để hệ thố g n tưới h à o n chỉnh. Theo đó, n u ế u q á k
hó khăn về vốn, và điều kiện địa hì h n cho p hép k ( hu tưới bằng ph g n ẳ hoặc gốc độ n h g iê g
n tương đối đồng đều) n n
ê chọn mô hình tưới rãnh, vì ô m h n
ì h này chỉ cần đầu tư máy bơm, đường ống h c í h
n là đủ, các đường ống nhá h n , đư n ờ g ố g n thứ cấp được t a h y bằng mương rãnh nh ỏ nên không tốn tiền mua ống. u T y nhi n ê , mô hì h n tưới rãnh sẽ khôn
g thể áp dụng khi khu đệm có địa hì h
n lồi lõm, bị chia cắt mạnh. Nếu k ô h g n p
á dụng được mô hình tưới rãnh ,n n
ê chọn mô hình tưới phun
tia, lợi thế của mô hìn h à n y là t à
o n bộ đường ống chính, đường ống nhánh, đường
ống thứ cấp đều là ống PVC n n
ê có thể dẫn nước đi qua những nơi mặt đất lồi lõm, í t h o a hụt nước tư i ớ và s ử dụng ổn định. Khi áp dụng ô m h n
ì h tưới rãnh, cần tí h n toán tương đối c í h nh xác ch ề i u dài, đường kí h
n của các loại ống dẫn và lựa chọn vật liệu, phư n ơ g pháp t i h ô c g n phù h p ợ . 3 2 . 6
. . Vật liệu sử dụng t o r ng xây dự g n hệ thố g n tưới
Hiện nay , trên thị trường ó c b n
á rất nhiều loại vật liệu sử dụng cho việc
cung cấp nước tưới nô g n nghi p
ệ , từ các loại ống mềm, ống cứng PVC , HDPV, ống k
im loại vv, với kích thước, c ủ
h ng loại, giá cả khác nh u a . Đối với đường ống h c í h n , nhất thi t
ế nên chọn mua ống loại tốt và có thông
số chịu lực cao nhấ t (thường ống dày 2 8
, -3mm, độ chịu lực 8 bar trở lên), vì đường ống h c ính k hi làm v iệc phải chịu á p lực rất cao. 31
Đối với đường ống nhánh và đườ g n ống thứ cấp ta ó
c thể sử dụng ống nhựa
tổ hợp. Loại ống này chu ê y n d n ù g h c o nô g n nghi p ệ , ó c hì h n dáng, màu sắc và đường kí h n u
q y chuẩn tương tự như ống PVC dùng cho cấ p nước sin h hoạt, nhưng được p a h nhiều bột đá n n
ê rẻ tiền hơn nhiều ( 0 3 -50%) o s với ống chí h n phẩm. Loại ống nà y thư n ờ g ha y bị lỗ mọt, nhưn g dễ dà g
n khắc phục bằng cách dùng khâu nối, hoặc n u
ê không, cho nước chảy ra từ lỗ mọt cũng góp phần u c g n cấp nước cho cây trồ g n . Tro g n trườ g n hợp quá k ó h kh n
ă , có thể đặt mua loại ống PE đen (ống dẹp
nhựa mềm) để làm đường ống nhá h
n hoặc ống thứ cấp.Loại ống này được làm
bằng nhựa dẽo và mềm như túi nil n o , được cuộn thà h n bà h n gần bằng bánh xe đạp, v
à đặc biệt là giá bán rất rẻ (loại có đườ g n k í h n 3 2 m m khoả g n 1 . 0 0 0 đồng/m, ống D=27 m m rẻ hơn).
Từ đường ống thứ cấp, để đưa nước v o
à gốc cây, có loại bét ch n â và ống
nhựa 3-4mm màu đen.Ta dù g n k o h ang điện (c ó loại h
k oang chạy pin để thi công
trên đồng ruộng) khoan lỗ có í k ch thước bằng với b t é chân, cắm vào ốn g PVC ,sau
đó nhét ống nhựa dẻo vào.Ố g n thứ cấp được ch n ô â s u kh ả o ng 5-10 c m sát hàng
cây, chỉ “lòi” lên ống nh a ự dẽo đen k ỏ
h i mặt đất ngay tại gốc cây để cu g n cấp nước tưới. 32 3 3
. .Thiết kế mạch điều khiển 3 3 . 1
. . Thiết kế phần c n ứ g Sử dụng phần mề m Proteus đ
ể thiết kế sơ đồ bố t í r mạch. V CC LCD 1 V CC 2 15 5V A V R1 10K 3 V s LCD 16x2A 1 16 0V V CC RS R/W| E K D0 D1D2 D3 D4 D5D6 D7 4 5 6 7 8 9 10 11 12 13 14 G N D G N D R1 R2 V CC 4k7 4k7 S W N 4 5 6 7 R R E D D D D IC1 D S 1307 S CL 6 7 S CL S Q W R3 S D A 5 3 S D A V bat J P 1 4k7 + X 1 X 2 BT1 11 X 1 P IN 3V - T 1 2 3 H V CC U 1 4 D 11 2 32,768 K hz V D D RA 0/A N 0/U LP WU /C12IN 0- 32 3 G N D V D D RA 1/A N 1/C12IN 1- 4 G N D
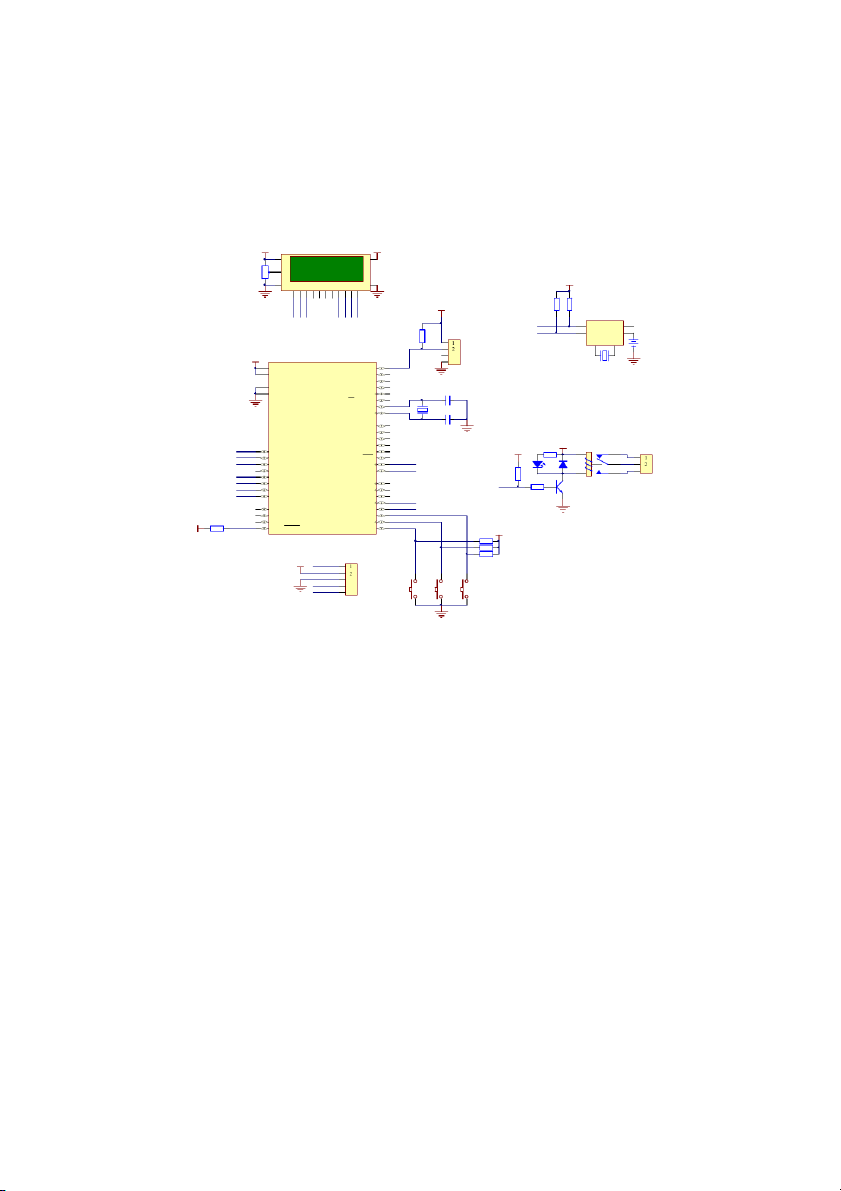
RA 2/A N 2/V REF -/CV REF /C2IN + 12 V S S RA 3/A N 3/V REF + /C1IN + 5 31 V S S RA 4/T0CK I/C1O U T 6 Cx1 7 RA 5/A N 4/S S /C2O U T 14 RA 6/O S C2/CLK O U T G N D 13 X 2 22pF RA 7/O S C1/CLK IN 4M hz Cx2 RB0/A N 12/IN T 33 22pF RB1/A N 10/C12IN 3- 34 35 G N D RB2/A N 8 36 RB3/A N 9/P G M /C12IN 2- V CC RS 19 37 R4 330 RL1 C RD 0 RB4/A N 11 V CC 5 2 H D 1 O RW 20 U RD 1 RB5/A N 13/T1G 38 EN 21 7 N RD 2 RB6/ C I S P CLK 39 P G C LED 1 1 D 1 22 40 P G D 00 M LED RD 3 R5 4 O D 4 27 RB7/ICS P D A T 4 3 3 N RD 4 B 10k 1 D 5 28 15 RO LE R6 Relay 10A /12V Y RD 5/P 1B RC0/T1O S O /T1CK I Q 1 A RO LE D 6 29 RD 6/P 1C RC1/T1O S I/CCP 2 16 C1815 M D 7 30 RD 7/P 1D RC2/P 1A /CCP 1 17 1K 18 S CL 8 RC3/S CK /S CL 23 S D A RE0/A N 5 RC4/S D / I S D A 9 24 D O WN RE1/A N 6 10 RC5/S D O 25 G N D U P R7 RE2/A N 7 RC6/TX /CK RS T 1 V CC RE3/M CLR/V P P RC7/RX /D T 26 M O D E 4k7 R8 V CC P IC18F 4523 R9 R 1 1 0 0 k 10k J P 2 10k V CC RS T 2 2 2 3 S W1 S W2 S W3 P G D 4 S W S W S W P G C 5 G N D J P 5 1 1 1 G N D Hình 3 . 1 . Sơ đồ mạch n guyên l ý
3.3.2.Mạch in thực tế sau khi thiết kế (sử dụng phần mềm atium). Altium desi n g er l à một phần mềm chu ê y n ngh n
à h được sử dụng trong thiết kế mạch điện tử. Ch o ph p é quả n lý thành cá
c project riêng hoặc thành các workspace. Hỗ trợ th ư viện khổ g n lồ, với nhi u ề lo i
ạ IC, ilnh kiện mới cập nhật.
Thiết kế mạch in với các tính năng à
c i đặt kích thước dây ,cách thức đi dây, hỗ trợ
thư viện, tự động kiể
m tra lỗi.Việc tiến hành mạch n i ó c thể được th c ự hiện thông
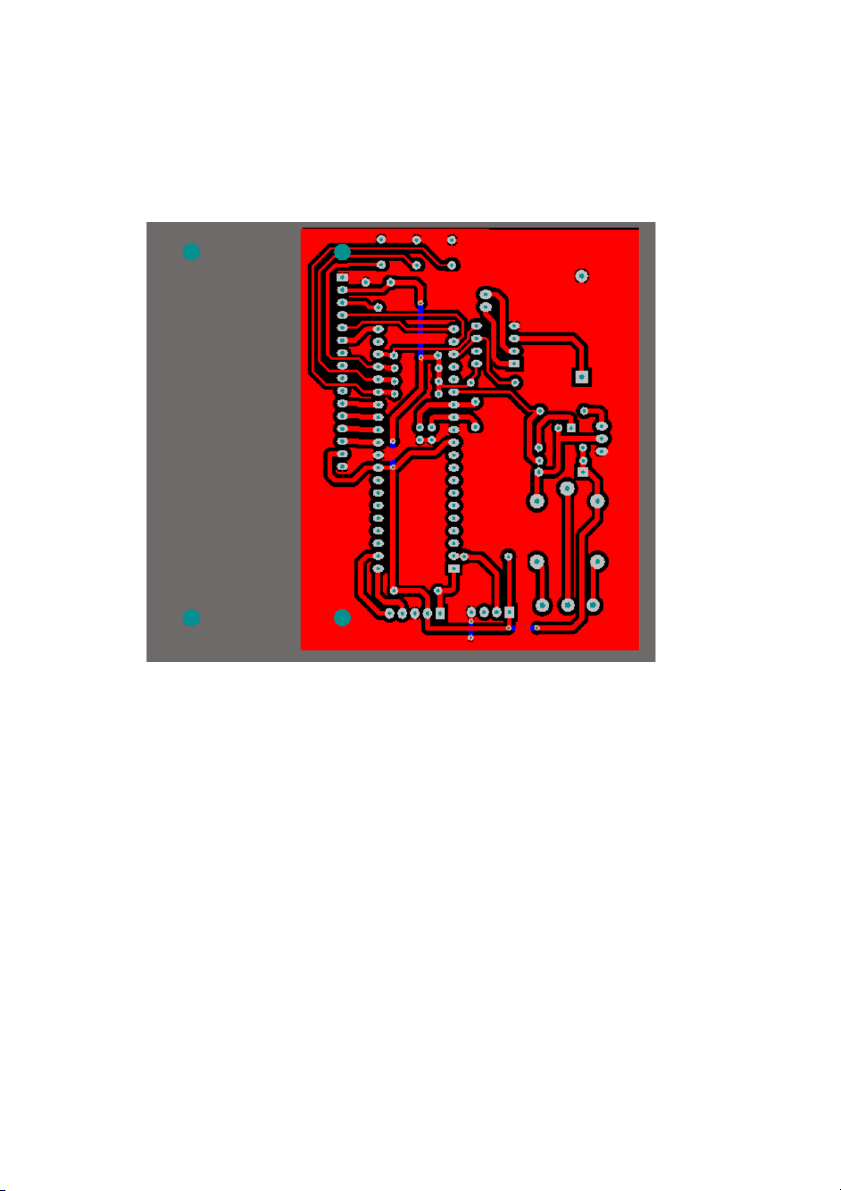
qua chế độ tự động. Tu y nhiên t ì h việc đ idâ y bằng ta y sẽ gi p ú mạch điện tử sẽ gọn và đẹp hơn. 33 Hình 3 . 2 .Mạ h c n i s u a k i h thiết k ế 3 3 . 3
. . Thiết kế phần mềm Lập trình cho PIC Việc lập trình c ho PIC16F877A s ử dụng ngôn ng
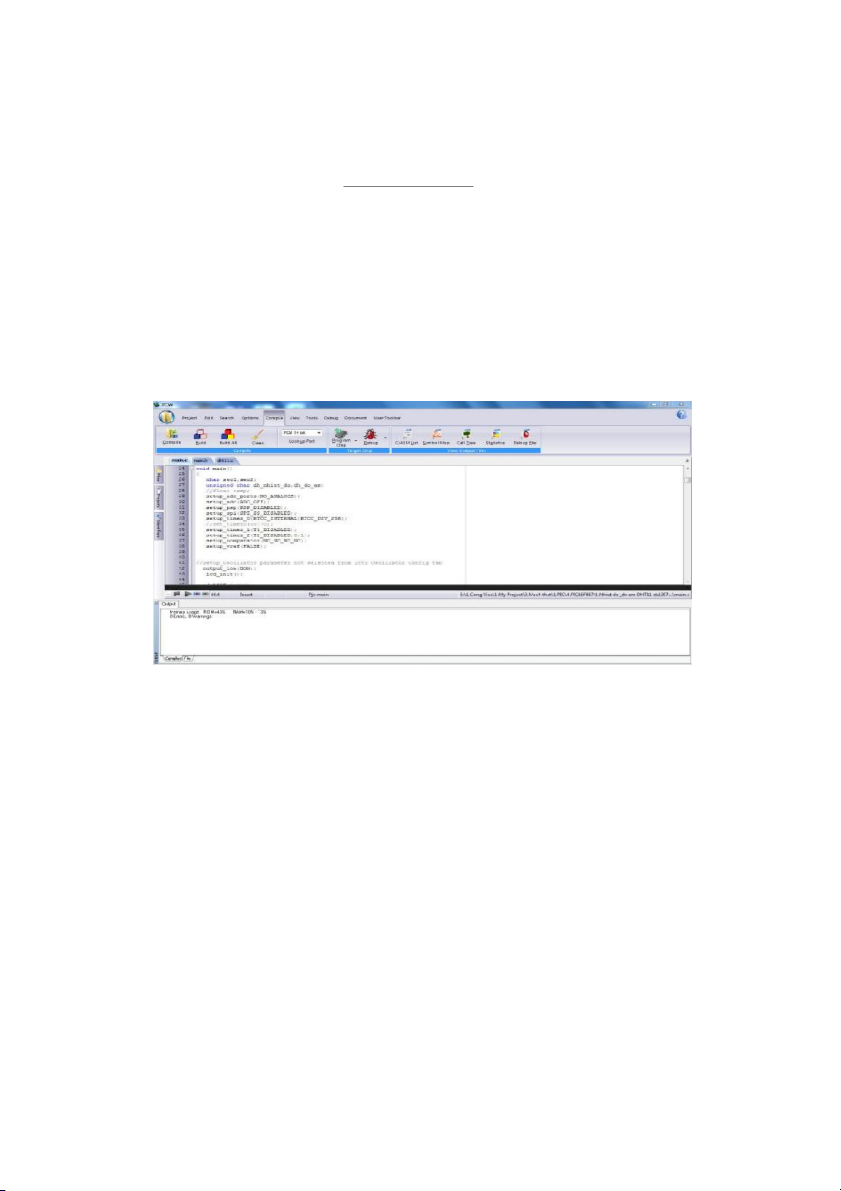
ữ C chuẩn, viết bằng phần mềm CCS PIC C Co p m iler. P hần mề m CCS hỗ trợ một th ư viện v i ớ khá nhiều hàm con n n ê việc l p ậ trì h n trở n n ê dễ d à g n h n ơ . Giao diện của ph n ầ mềm khá đẹp 34 và ó c thể sử dụ g n một cá h c dễ d àng. h T êm v ào đó CCS u c g n cấp một t ra g n web có code c huẩn để tham khảo: c csin o f c . om/fo u r m . Phần mềm bi n ê soạ n chương t ì r nh CCS CCS (Cus o t m Computer Services) là t ì r nh biê n dịch dùng ngôn ng ữ C lậ p trình
cho VĐK có mã lệnh được tối ưu khi biên dịch và chứa rất nhiều hà m phục vụ cho mọi mục đích đ iều khiển. N o g ài r a CC
S có đủ khả năng để khô g n phải c è h n bắt kỳ dò g n lệnh Assembly n o
à . Điểm nổi bật CCS cung cấp nhi u ề ô c g n cụ tiện ích hỗ trợ người dùng tro g
n việc biên dịch, bắt lỗi c hương trì h n v à quản lý bộ nhớ. Hình 3 . 3
. Giao diện của phần mềm lập trình 35
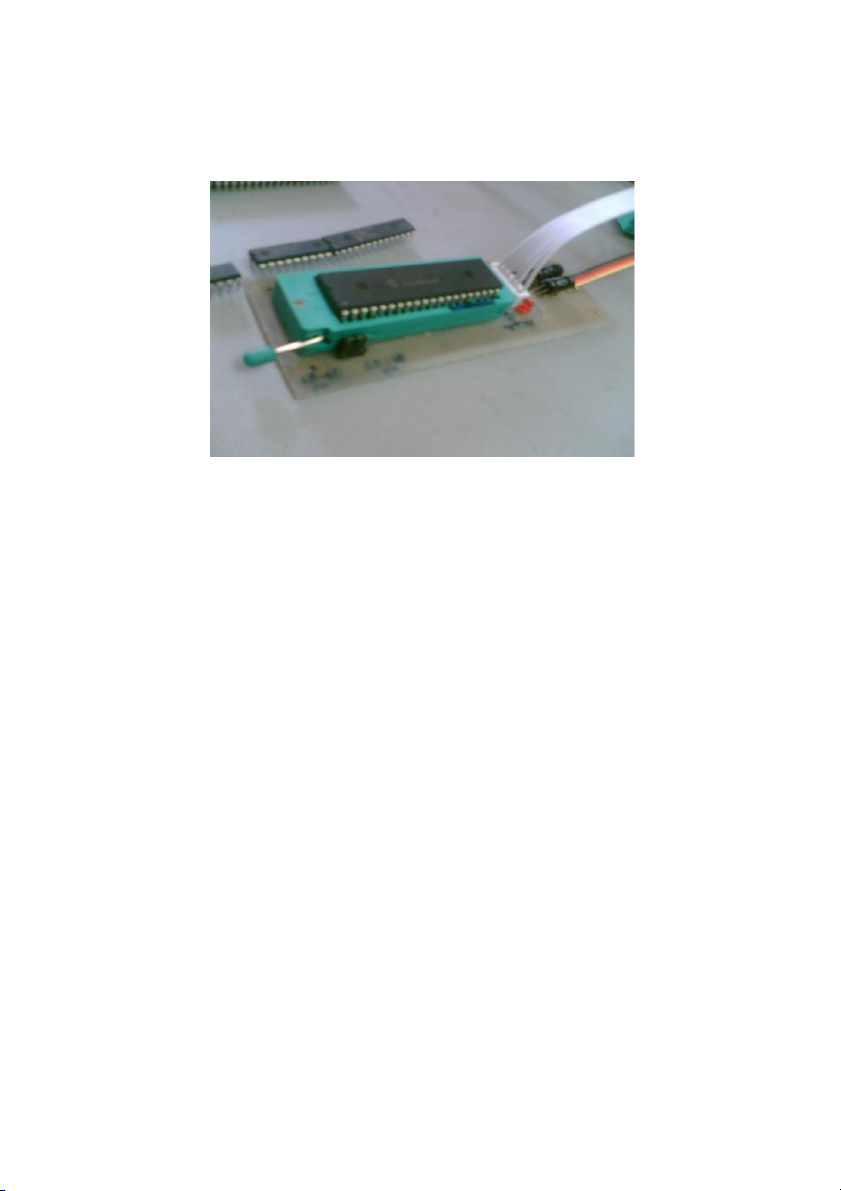
Mạch nạp sử dụng nạp c hương trình c ho PIC 6 1 F8 7 7 A à l mạch nạp PG2C Hình 3 . 4. P 2
G C mạch nạp PIC qua cổng COM
Chức năng của mạ h c : Có khả năng n p ạ h u
ầ hết các loại vi điều khiển họ PIC b o a gồm các loại 8 ch n â , 4 1 c â h n, 18 h c n â , 8 2 c â h n v à 40 châ . n Thông qua phần mề m nạp pickit2 Có khả năng n p ạ trự c tiếp cho vi điều k hi n ể rời h t ô g n u q a o s k c et h ặ o c thông qua đường ICSP. Cách th c ứ sử dụng mạch n p ạ P 2 G C k há đơn giản. 36 Giao d
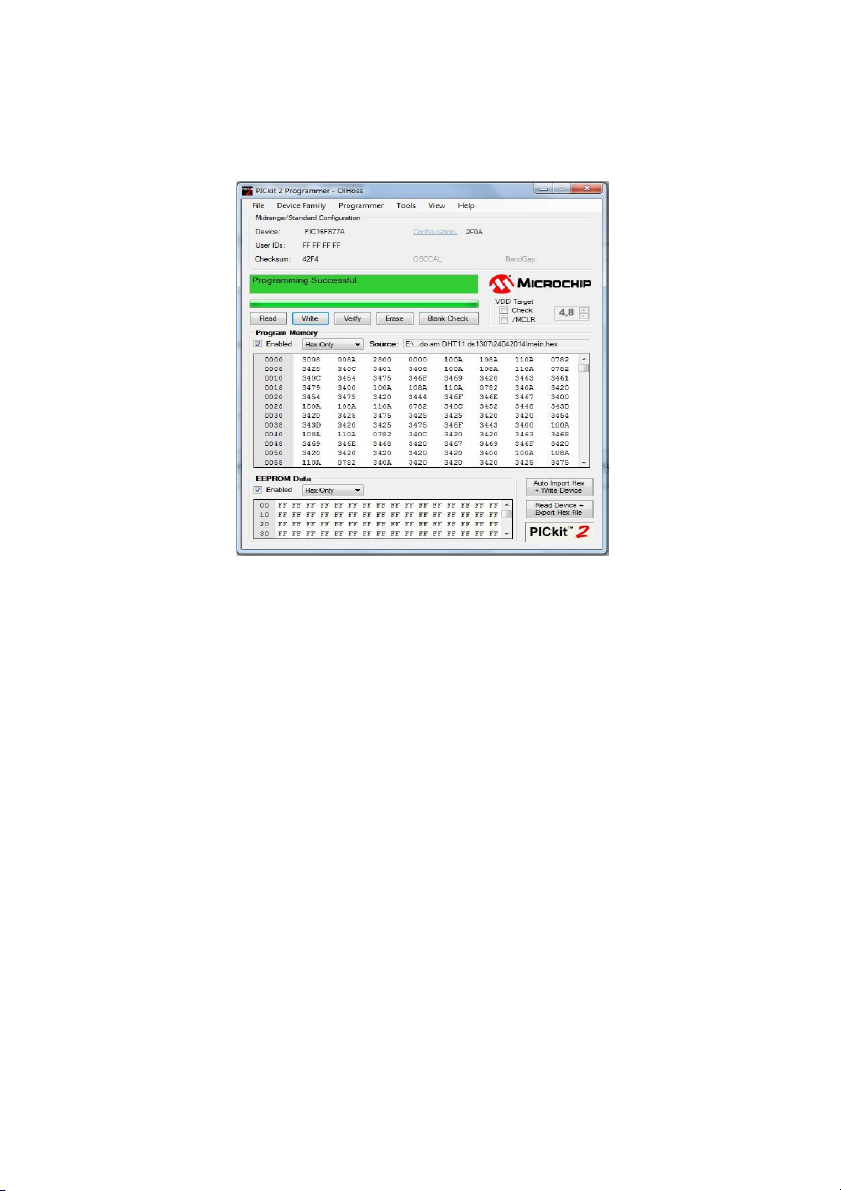
iện phần mềm nạp cho PIC i k t2: Hình 3 . 5. Giao di n ệ phần mề m n p ạ pickit2
Pickit2 programmer/ Debugger là sản phẩm của i
m crochip được phát t riển
trong thời gian gần đây. Điểm đặc biệt của Pickit2 là chi phí thấp, có khả năng nạp, gỡ rối hầu h t
ế các chip IC và EEPROM, tốc độ cực nhanh và tiện dụng, có
thể nạp trực tiếp trong MPLAB I DE h oặc b n ằ g p
hần mềm Pickit2 programmer application.
Ứng dụng Pickit2 program e m r cho ph p é bạn nạp chương trì h n cho tất cả các
Pic được hỗ trợ liệt kê t rong f l i e i P ckit2 Read e m . i G ao diện Pi k c it2 V20. 0 5 . 2 0 . Em s
ử dụng phần mềm pickit2 để nạp cho PIC nga y trên mạch theo chuẩn
ICSP. Khi trình dịch CCS đã dịch dữ liệu thành fi e l * h . ex, sau đó pi k c it2 sẽ gửi t ừ 37
máy tính tới vi điều khiển, vi điều khiển s ẽ nhận d
ữ liệu thông qua cổng truyền
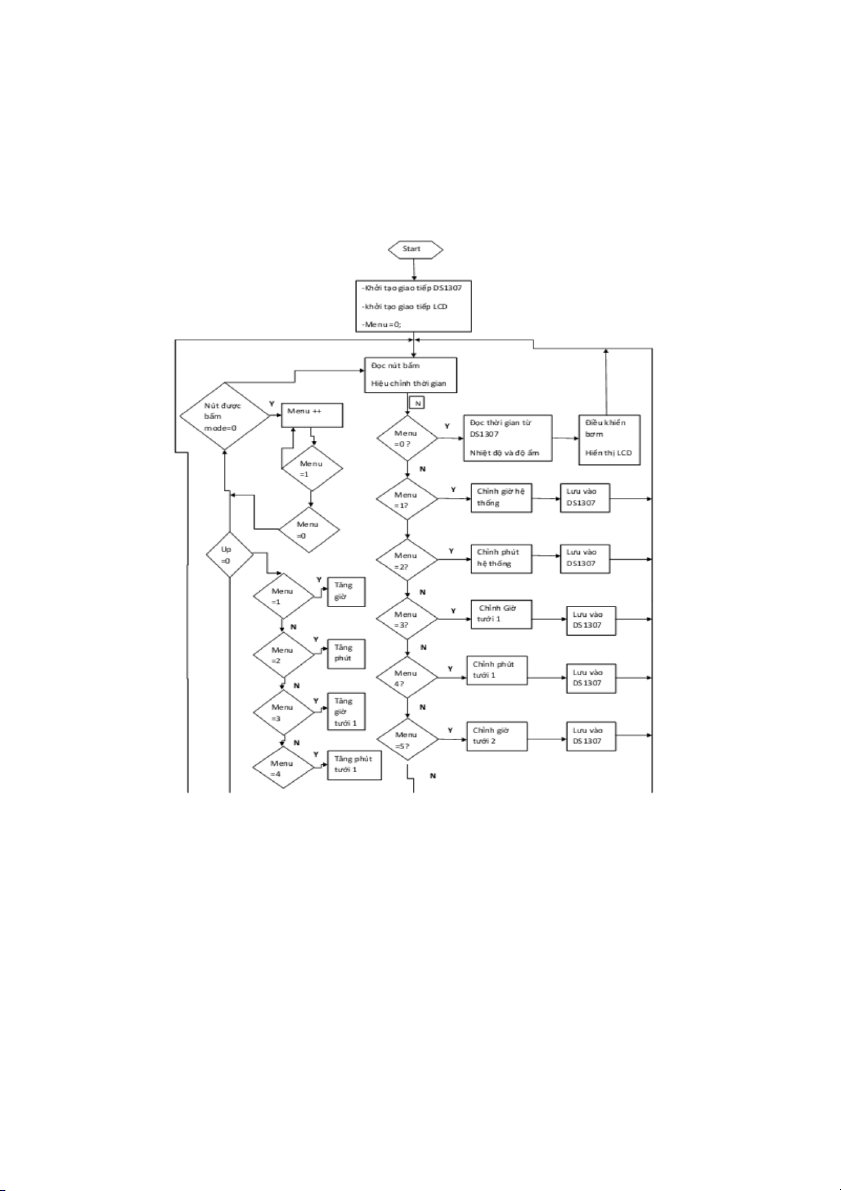
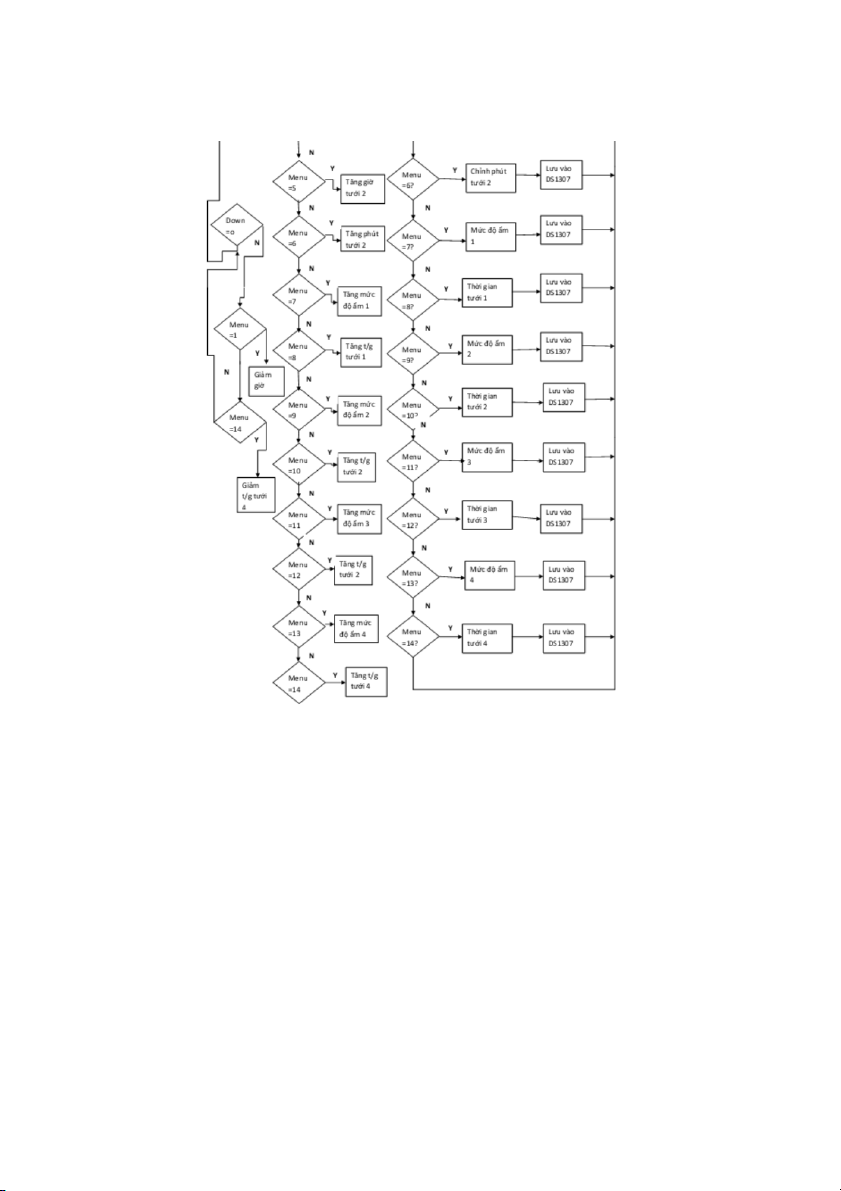
thông nối tiếp và ghi lên bộ nhớ chương trình. 3 3 . 4 . . Thuật t á o n điều khiển 38 Hình 3 . 6
. Lưu đồ thuật t oán điều khi n ể . 39 3 3 . 5
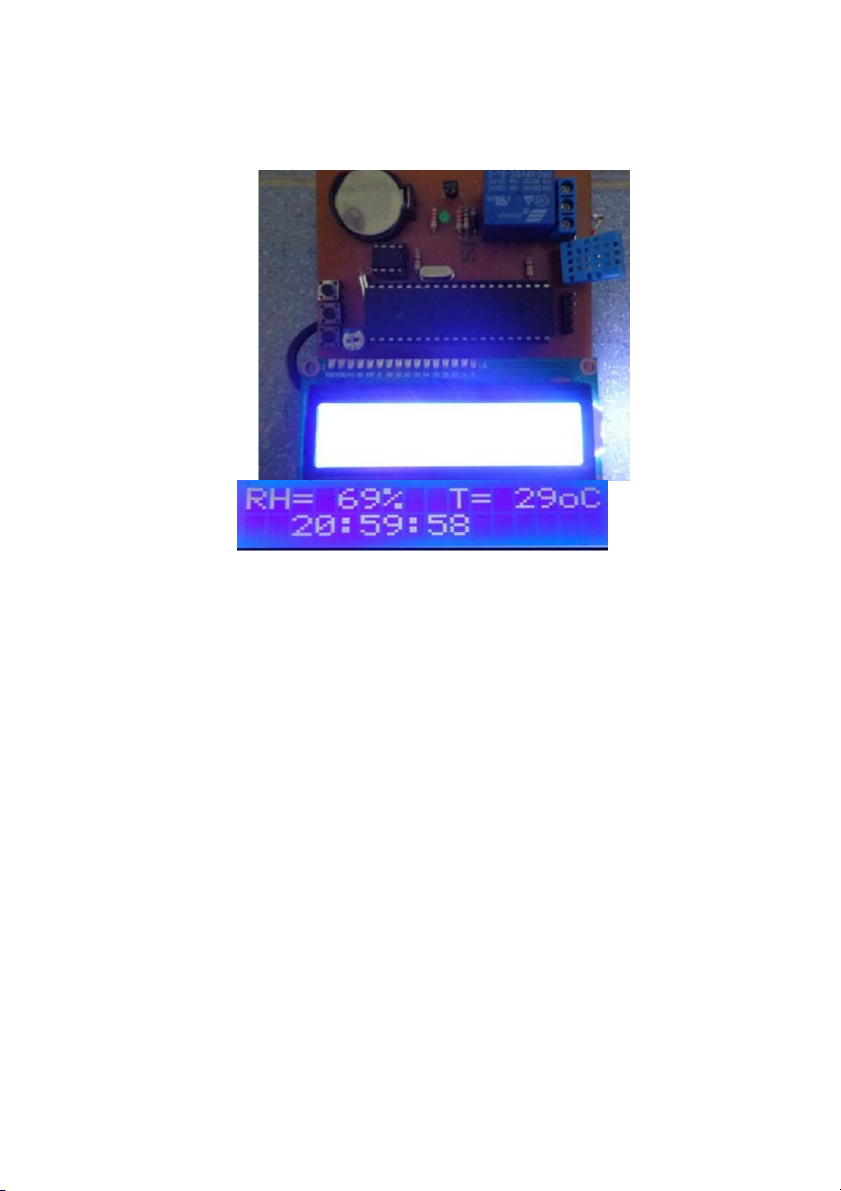
. . Mạch thực tế sau khi thiết kế và chạy thử Hình 3
. 7. Mạch thực tế sau khi thiết ế k và chạy thử Mạch thực tế a s u k hi t hiết kế v à chạ y thử đã điều k hiển đóng n gắt ch n í h xác thiết
bị điện theo t hời gian cài đặt. 40 KẾT LUẬ N V À HƯỚNG PH T Á T RIỂN ĐỀ T ÀI
4.1. Đánh giá kết quả Tro g n u q á trình thự c hiện đề à t i em đã tì m hiểu về hệ th n ố g tưới câ y tự động. o D vậy em đã tì
m hiểu về hệ thống tự động vì nó là cơ sở lý thuyết quan trọng t o r ng đề tài nà . y
- Tìm hiểu về các hệ th n
ố g tưới cây tự động: phân loại ,nguyên lý ,c c á h chế tạo…
- Tìm hiểu về vi điều khi n ể PIC 6 1 F8 7 7 A, phươ g n h p áp sử dụng vi điều khi n ể PIC để x ử ý l v
à hiển thị kết quả tr n ê LCD.
- Thiết kế mạch và v ế i t chương tr n ì h h c o vi đi u ề khi n ể , đảm bảo mạch điều k hiển h ạ o t động tốt 4 2
. . Hạn chế của đề tài Do điều kiện ó
c hạn nên đề tài này e m chỉ th c
ự hiện ở việc thiết kế ra mạch điều k hiển đóng n
gắt thiết bị điện (bơm) theo độ ẩm. 4 3 . . Hướng p á h t t riển đề t ài Có thể lập trì h n lên 3 , 4 l n ầ tưới trong g n ày thay vì 2 l n ầ tưới hi n ệ tại. Lập trình điều khiển n hi u ề thiết bị h n ơ (các v an điện từ). Thiết kế thê
m vào hệ thống bộ phận th n ô g b o á c o h người s ử dụ g n biết được
tình trạng của hệ thống (Sử dụng Simcom). 41
TÀI LIỆU THAM KHẢO [1] TS Nguyễn Trườ g n Gia g n 2 ( 0 1
1 ), Kĩ thuật vi xử l ý, NXB: Trường Đại học Giao t hông vận t i ả . [2] Trần u X n â Trư n ờ g (201 )
0 , Tài liệu sử dụng CCS, NXB: Trường Đại học Bách k o h a TP Hồ Chí Minh. [3] Data h s eet PIC 16F8 7 7 a của Mic o r h c ip [4] P S
G . TS Hoàng Đức Liên (2007),Th y ủ lực và cấp t o h át nước tron g Nông nghiệp, NXB: Trư n ờ g ĐH ô N g n g N hi p ệ . Danh m c ụ c ác webs t i e t ham khảo: 1. http://cata o l d g atasheet.com 2. http://ccs n i fo. o c m/forum 3. http / : d / ien u t vi t e nam.net 4. http / : d / ie d n andientu c . om 42 PHỤ LỤC Code chương t ì r nh File main.h #include < 16 8 F 77A h . > #device adc=8
#FUSES NOWDT //No Watch Dog Timer
#FUSES WDT128 //Watch Dog Timer uses 1:128 Postscale
#FUSES HS //High speed Osc (> 4mhz for PCM/PCH) (>10mhz for PCD)
#FUSES NOPROTECT //Code not protected from reading
#FUSES NOBROWNOUT //No brownout reset
#FUSES BORV21 //Brownout reset at 2.1V
#FUSES NOPUT //No Power Up Timer
#FUSES NOCPD //No EE protection
#FUSES STVREN //Stack full/underflow will cause reset
#FUSES NODEBUG //No Debug mode for ICD
#FUSES NOLVP //No low voltage prgming, B3(PIC16) or B5(PIC18) used for I/O
#FUSES NOWRT //Program memory not write protected
#FUSES NOWRTD //Data EEPROM not write protected
#FUSES IESO //Internal External Switch Over mode enabled
#FUSES FCMEN //Fail-safe clock monitor enabled
#FUSES NOPBADEN //PORTB pins are configured as digital I/O on RESET
#FUSES NOWRTC //configuration not registers write protected
#FUSES NOWRTB //Boot block not write protected
#FUSES NOEBTR //Memory not protected from table reads
#FUSES NOEBTRB //Boot block not protected from table reads 43
#FUSES NOCPB //No Boot Block code protection
#FUSES LPT1OSC //Timer1 configured for low-power operation
#FUSES MCLR //Master Clear pin enabled
#FUSES NOXINST //Extended set extension and Indexed Addressing mode disabled (Legacy mode) #use delay(clock=20000000)
#use i2c(Master,Fast,sda=PIN_C4,scl=PIN_C3) File chương t ì r nh chính main.c #include " a m n i .h" #include "PIC 6 1 8 F 77A_r g e i t s ers.h" #include " S D 13 7 0 _i t n erfa e c .c" #include "dht11.c" #include < Dr v i e_LC . D c> #define MODE PIN_C5 #define UP PIN_C6 #define DOWN PIN_C7 #define BOM PIN_C0 unsigned h c ar e s c=0 h , ou = r 12,min=1 , 1 do = w 4,d y a = 6 1 ,mth=4, e y ar 1 = 4; int8 H l _ evel_1 = 50,H l _ evel_2 = 60,H_lev l e _3 = 70,H_lev l e _4 = 80;
int8 TIMER_RUN_LEVER_1 = 4,TIMER_RUN_LEVER_2 = 3,TIMER_RUN_LEVER_3 = 2,TIME _ R RU _ N LEVE _ R 4 = 1; int menu= 0; int time = 0; int hour_ l a arm f _ ir t s = 6; int i m n_ l a arm_first = 0; int hour_ l a arm_second = 18; int i m n_ l a arm_second = 0;
int1 chophep_bom1 = 0,chophep_bom2 = 0; void Modi y f _time v ( o d i ); 44 int Thoi_gian_bom i ( nt do_am); void Dieu k _ h e i n_bom(i t n o d _am); void main() { char s ec1,se 2 c ; unsigned char dh_nhi t e d _ o,dh_do a _ m; / f / loat temp; setup_a c d _ports(N _ O ANALO S G | S V S_VDD); setup_adc(AD _ C OFF|AD _ C TA _ D M L U _0); setup_p p s ( S P _ P DISAB E L D); setup_spi S ( PI_ S S _DISABLED); setup_ d w t(W T D _OFF); setup_time _ r 0(RTC _ C INTERN L A | T R C _ C DI _ V 256); //set_timer0 5 ( 57 0 7 ); setup_time _ r 1 T ( 1_DISABLED); setup_time _ r 2 T ( 2_DISABLE , D 0,1); setup_co p m arator(N _ C N _ C N _ C NC); setup_vref(F L A SE); //Setup_Osci ll t a or paramete r not s l e e t
c ed from Intr Osci llator Config tab output_low(BOM); lcd_init(); ds130 _ 7 init(); ds130 _ 7 get_time h ( our,min,s c e 1); delay_ms 2 ( 000); ds130 _ 7 get_time h ( our,m n i ,sec2); if(s c e 2 == sec1) { ds13 7 0 _set_date_time ( day, mth , year, do , w hour, min, sec); } 45
printf(lcd_putc,"\fTuoi cay"); delay_ms 1 ( 000); printf(lcd_putc," n \ Tu Dong"); delay_ms 1 ( 000); // TODO: USER CODE!! while t ( rue) { delay_ms 1 ( 00); Modify_ti e m (); if( e m nu == 0) { Dieu_khien b _ om d ( h_do_am); ds1307_get_time h ( our,min, e s c); if(DHT_GetTem u H mi( d & h_nhie _ t do, d & h_do_am)) { printf l ( cd_ u p tc," f \ R = H %u % % T= %uoC",dh_do a _ , m dh_nhiet d _ o); printf(lcd_putc,"\n %u:%u: u % ",hour,m n i ,sec); } } else if( e m nu == 1) {
printf(lcd_putc,"\f chinh gio "); printf(lcd_putc,"\n %u: u % ",hour,m n i ); } else if( e m nu == 2) {
printf(lcd_putc,"\f chinh phut "); printf(lcd_putc,"\n %u: u % ",hour,min); } 46 else if( e m nu == 3) { printf(lcd_putc,"\f G o i tuoi 1 "); printf(lcd_putc,"\n %u: u % ",hour a _ lar _ m first, i m n_alarm_f r i st); } else if( e m nu == 4) {
printf(lcd_putc,"\f Phut tuoi 1 "); printf(lcd_putc,"\n %u: u % ",hour a _ lar _ m first, i m n_alarm_f r i st); } else if( e m nu == 5) {
printf(lcd_putc,"\f Gio tuoi 2 "); printf(lcd_putc,"\n %u: u % ",hour a _ lar _ m seco d n ,min_alar _ m se o c d n ); } else if( e m nu == 6) {
printf(lcd_putc,"\f Phut tuoi 2 "); printf(lcd_putc,"\n %u: u % ",hour a _ lar _ m seco d n ,min_alar _ m se o c d n ); } else if( e m nu == 7) { printf(lcd_putc,"\f Muc o d a m 1 "); printf(lcd_putc,"\n u % ",H_l v e e _ l 1); } else if( e m nu == 8) { printf(lcd_putc,"\f h T oi gian h c ay 1 "); printf(lcd_putc,"\n u % ",TIME _ R RU _ N LEVE _ R 1); 47 } else if( e m nu == 9) { printf(lcd_putc,"\f Muc o d a m 2 "); printf(lcd_putc,"\n u % ",H_l v e e _ l 2); } else if( e m nu == 10) { printf(lcd_putc,"\f h T oi gian h c ay 2 "); printf(lcd_putc,"\n u % ",TIME _ R RU _ N LEVE _ R 2); } else if( e m nu == 11) { printf(lcd_putc,"\f Muc o d a m 3 "); printf(lcd_putc,"\n u % ",H_l v e e _ l 3); } else if( e m nu == 12) { printf(lcd_putc,"\f h T oi gian h c ay 3 "); printf(lcd_putc,"\n u % ",TIME _ R RU _ N LEVE _ R 3); } else if( e m nu == 13) { printf(lcd_putc,"\f Muc o d a m 4 "); printf(lcd_putc,"\n u % ",H_l v e e _ l 4); } else if( e m nu == 14) { printf(lcd_putc,"\f h T oi gian h c ay 4 "); 48 printf(lcd_putc,"\n u % ",TIME _ R RU _ N LEVE _ R 4); } } } void Modi y f _time v ( o d i ) { if(input(MODE = ) = 0) { delay_ms 1 ( 00); if i ( nput(MODE = ) = 0) { e m nu ++; if( e m nu == 15) menu = 0; } } if(in u p t(U ) P == 0) { while( i ! nput(U ) P ); if( e m nu == 1)// chinh gio { hour++; if(hour = = 24 ) hour = 0; } else if( e m nu == 2)// ch n i h phut { min++; if( i m n == 60) min = 0; } else if( e m nu == 3)// ch n i h gio hen thu nhat 49 { hour_a a l r _ m first ++; if(hour_alarm_f r i st = = 24 ) hour_alarm_firs t= 0; } else if( e m nu == 4)// ch n i h phu then thu nhat { min a _ lar _ m fir t s ++; if( i m n_alarm_fi s r t = = 31) min_a a l r _ m first = 0; } else if( e m nu == 5) // chinh gio h n e thu 2 { hour_a a l r _ m s c e ond ++; if(hour_alarm s _ eco d n == 24 ) hour_alar _ m sec n o d = 0; } else if( e m nu == 6) // chinh phut e h n t u h 2 { min a _ lar _ m se o c nd ++; if( i m n_alar _ m e s cond = = 31) min_alar _ m e s cond = 0; } else if( e m nu == 7) // chinh do a m khong c he 1 { H_ e l vel_1 ++; if(H_le e v l 1 _ == 100) H_le e v l_1 = 0; } else if( e m nu == 8) { TIMER_RU _ N LEV _ R E 1++; if(TIMER_RU _ N LEVE _ R 1== 30 ) TIMER_RU _ N LEVE _ R 1 = 0; } 50 else if( e m nu == 9) // chinh do a m khong c he 2 { H_ e l vel_2 ++; if(H_le e v l 2 _ == 100) H_le e v l_2 = 0; } else if( e m nu == 10) { TIMER_RU _ N LEV _ R E 2++; if(TIMER_RU _ N LEVE _ R 2== 30 ) TIMER_RU _ N LEVE _ R 2 = 0; } else if( e m nu == 11) // chinh d o a m kho g n che 3 { H_ e l vel_3 ++; if(H_le e v l 3 _ == 100) H_le e v l_3 = 0; } else if( e m nu == 12) { TIMER_RU _ N LEV _ R E 3++; if(TIMER_RU _ N LEVE _ R 3== 30 ) TIMER_RU _ N LEVE _ R 3 = 0; } else if( e m nu == 13) // chinh d o a m kho g n che 4 { H_ e l vel_4 ++; if(H_le e v l 4 _ == 100) H_le e v l_4 = 0; } else if( e m nu == 14) { TIMER_RU _ N LEV _ R E 4++; if(TIMER_RU _ N LEVE _ R 4== 30 ) TIMER_RU _ N LEVE _ R 4 = 0; 51 } ds13 7 0 _set_date_time ( day, mth , year, do , w hour, min, sec); } if(input(DOWN = ) = 0) { while( i ! nput(DOWN)); if( e m nu == 1)// chinh gio { hour--; if(hour = = 255 ) hour = 23; } else if( e m nu == 2)// ch n i h phut { min--; if( i m n == 255) min = 59; } else if( e m nu == 3)// ch n i h gio hen thu nhat { hour_a a l r _ m first --; if(hour_alarm_f r i st = = 255 ) hour_alarm_f r i st = 0; } else if( e m nu == 4)// ch n i h phu then thu nhat { min a _ lar _ m fir t s --; if( i m n_alarm_fi s r t = = 255) min_alarm_fi s r t = 30; } else if( e m nu == 5) // chinh gio h n e thu 2 { hour_a a l r _ m s c e ond --; 52 if(hour_alarm s _ eco d n == 255 ) hour_alar _ m se o c nd = 23; } else if( e m nu == 6) // chinh phut e h n t u h 2 { min a _ lar _ m se o c nd --; if( i m n_alar _ m e s cond = = 255) min_alarm s _ eco d n = 30; } else if( e m nu == 7) // chinh do a m khong c he 1 { H_ e l vel_1 --; if(H_le e v l 1 _ == 255) H_le e v l_1 = 100; } else if( e m nu == 8) { TIMER_RU _ N LEV _ R E 1--; if(TIMER_RU _ N LEVE _ R 1== 255 ) TIMER_RU _ N LEVE _ R 1 = 30; } else if( e m nu == 9) // chinh do a m khong c he 2 { H_ e l vel_2 --; if(H_le e v l 2 _ == 255) H_le e v l_2 = 100; } else if( e m nu == 10) { TIMER_RU _ N LEV _ R E 2--; if(TIMER_RU _ N LEVE _ R 2== 255 ) TIMER_RU _ N LEVE _ R 2 = 30; } else if( e m nu == 11) // chinh d o a m kho g n che 3 { 53 H_ e l vel_3 --; if(H_le e v l 3 _ == 255) H_le e v l_3 = 100; } else if( e m nu == 12) { TIMER_RU _ N LEV _ R E 3--; if(TIMER_RU _ N LEVE _ R 3== 255 ) TIMER_RU _ N LEVE _ R 3 = 30; } else if( e m nu == 13) // chinh d o a m kho g n che 4 { H_ e l vel_4 --; if(H_le e v l 4 _ == 255) H_le e v l_4 = 100; } else if( e m nu == 14) { TIMER_RU _ N LEV _ R E 4--; if(TIMER_RU _ N LEVE _ R 4== 255 ) TIMER_RU _ N LEVE _ R 4 = 30; } ds13 7 0 _set_date_time ( day, mth , year, do , w hour, min, sec); } } int Thoi_gian_bom i ( nt do_am) { int time_r n u ; if(do_a m l 1) { time_ru n = TIMER_RU _ N LEVE _ R 1; } el e s if(do_a m l vel 2 _ ) 54 { time_ru n = TIMER_RU _ N LEVE _ R 2; } el e s if(do_a m l vel 3 _ ) { time_ru n = TIMER_RU _ N LEVE _ R 3; } el e s if(do_a m l vel 4 _ ) { time_ru n = TIMER_RU _ N LEVE _ R 4; } else { time_ru n = 0; } return(ti e m _r n u ); } void Dieu k _ h e i n_bom(i t n o d _am) { if(ch p o hep b _ o 1 m == 0| chophep_ o b 2 m == 0) { ti e m = Thoi_gian_ o b m d ( o_am); }
if(hour == hour_alarm_first && min == min_alar _ m first) { chophep_bo 1 m = 1; } if(hour == hour_alar _ m e
s cond && min == min_alar _ m sec n o d) { 55 chophep_bo 2 m = 1; } if(ch p o hep b _ o 1 m == 1) { if( i m n <= min_alar _ m fir t s +time) { outpu _ t hi h g (BOM); } else { chophep_ o b 1 m =0; outpu _ t low(BOM); } } if(ch p o hep b _ o 2 m == 1) { if( i m n <= min_alar _ m e s cond+time) { outpu _ t hi h g (BOM); } else { chophep_ o b 2 m =0; outpu _ t low(BOM); } } } File DHT11.h 56 #define DHT_DATA_IN PORTA0 #define DHT_DATA_OUT LATA0 #define DHT_DDR_DATA TRISA0
/****************************************** /* Kieu So Nguyen Co Dau */ #if d n ef _ _D T H 11_H #define __DHT11_H typedef i t n 1 i b t; typedef i t n int8 t _ ; typedef long i t n 16_t; typedef long long i t n 32_t;
/* Kieu So Nguyen Khong Dau */ typedef un i s gned i t n uint8_t; typedef un i s gned l ong ui t n 16 t _ ; typedef un i s gned long l ong ui t n 32 t _ ; /* Kieu So Thuc */ typedef l f oat l f oat32_t; #define DHT_ER 0 #define DHT_OK 1
/******************************************************************************* Noi Dung : Kiem tra d p a ung cu a DHT11 sau yeu c au ch y u en doi. Tham Bien : h K n o g.
Tra Ve : DHT_ER: Dap ung cua DHT bi l oi. DHT_OK: Dap n u g cua D T H h t anh cong. ******** * * **** * * ***** * * ******* * * **** * * ***** * * ******* * * **** * * ***** * * ******* * * ****/ //uin 8 t _t DHT_IsOk v ( oid); Noi Dung : o D c 1 b t y e u d l e i u u t D T H 11. Tham Bien : h K n o g. 57 Tra Ve : 1 byte du lieu. ************* * * ***** * * ******* * * **** * * ***** * * ******* * * **** * * ***** * * ******* * * ****/ uin 8 t _t D T H _R a e dByte v ( o d i );
/******************************************************************************* Noi Dung : o D c 1 khun g du ileu tu D T H 11 gui ve. Tham Bien : array: a m ng so ng y u en 8 b it luu tru k u h ng du li u e .
Tra Ve : - DHT_OK: Neu DHT va MCU gui du lieu thanh cong. - DHT_ER: Neu D T H va MC U gui du li u e that bai. ************* * * ***** * * ******* * * **** * * ***** * * ******* * * **** * * ***** * * ******* * * ****/ Noi Dung : o D c i g a t i r h n i t e do, d o am tu DHT.
Tham Bien : *tem: con tro luu tru gia tri nhiet o d . *humi: con t o r u l u tr u gia t i r do am.
Tra Ve : - DHT_OK: Neu do nhiet do,do am thanh cong. - DHT_ER: Ne u do nhiet o d , do am x ay a r loi. ************* * * ***** * * ******* * * **** * * ***** * * ******* * * **** * * ***** * * ******* * * ****/ Noi Dung : MCU gui y u e cau chuyen doi d en DH 1 T 1. Tham Bien : h K n o g. Tra Ve : Khong. ******** * * **** * * ***** * * ******* * * **** * * ***** * * ******* * * **** * * ***** * * ******* * * ****/ #include "dht11.h" uin 8 t _t D T H _GetTem u H mi u ( int8_t *te , m u n i t8_t *humi) { ui t n 8_ tbuffer[5]={0,0 0 , 0 , ,0}; ui t n 8_t ii,i,checksum; DHT_DD _ R DAT = A 0; // set la c n o g ra DHT_DAT _ A O T U =1; delay_us 6 ( 0); DHT_DAT _ A O T U =0; delay_ms 2 ( 5); // it nhat 18ms 58 DHT_DAT _ A O T U =1; //de a l y_us 4 ( 0); // doi D T H dap ung tro g n von g 20us-40us DHT_DD _ R DAT = A 1; delay_us 6 ( 0); if(DHT_DAT _ A IN)retu n r DHT_ER ; el e s while(!(D T H _DATA_IN) ; ) //Doi DaTa len 1 delay_us 6 ( 0); if(!DHT_DAT _ A IN)retu n r DHT_ER; el e s while((D T H _DAT _ A IN) ; ) //Doi Data v e 0 //Bat d u a doc d u lieu for i ( =0;i<5;i++) { for(ii=0;ii<8;ii++) { while((!DHT_DAT _ A IN));// o D i Data len 1 delay_us 5 ( 0); if(DHT_DAT _ A IN) { buffer[i] = | 1 ( << 7 ( -ii)); while((DHT_DAT _ A IN));// o D i Data xuo g n 0 } } } checksu = m buffer[0]+buffer[1] b + uffer[2] b + uffer[ ] 3 ; //DHT_DD _ R DAT = A DD O R UT; //DHT_DAT _ A O T U =1; if((checksum) = ! buffer[4] r ) eturn DHT_ER; *tem = buffer[2]; *humi = buffer[0]; 59 return DHT_OK; } 60
Tài liệu liên quan:
-

Đề cương ôn tập Hệ thống điện | Trường Đại học Điện lực
23 12 -

Giao trình Cung Cấp Điện - Tài Liệu Học Tập Đầy Đủ
33 17 -

Đồ án hệ thống cơ điện tử | Trường Đại học Điện Lực
707 354 -
Đề thi trắc nghiệm môn Linh kiện điện tử bản chính | Trường đại học Điện Lực
2.1 K 1.1 K -

Lý thuyết kĩ thuật vi xử lý - EPU | Điện chuyên ngành | Trường đại học Điện Lực
856 428