Giới thiệu chung về động cơ kích từ độc lập | Trường đại học Điện Lực
Giới thiệu chung về động cơ kích từ độc lập | Trường đại học Điện Lực được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn sinh viên cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Điện chuyên ngành 18 tài liệu
Trường: Trường Đại học Điện lực 502 tài liệu
Tác giả:



Preview text:
Giới thiệu chung về động cơ kích từ độc lập
Đặc điểm cấu tạo và nguyên lý hoạt động
Đặc điểm cấu tạo
Giống như những máy điện quay khác nó cũng gồm phần đứng im (stato) và phần
quay (rô to). Về chức năng máy điện một chiều cũng được chia thành phần cảm (kích từ)
và phần ứng (phần biến đổi năng lượng). Khác với máy điện đồng bộ ở máy điện một
chiều phần cảm bao giờ cũng ở phần tĩnh còn phần ứng là ở roto. Trên hình 1.2 biểu diễn
cấu tạo của động cơ điện một chiều gồm các bộ phận chính.
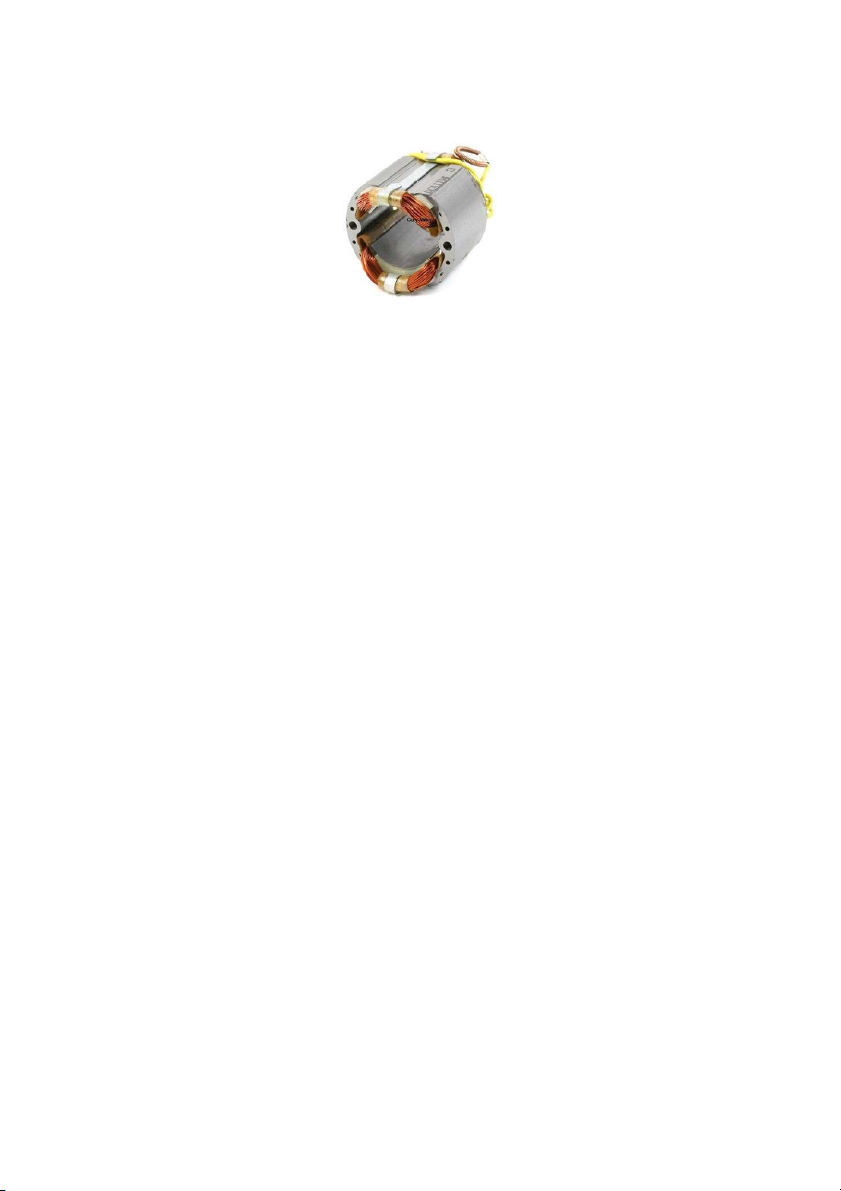
Hình 1.1: Cấu trúc động cơ một chiều Stator
Stator máy điện một chiều là phần cảm, nơi tạo ra từ thông chính của máy. Stato gồm các chi tiết sau: Hình 1.2: Stator 1. Cực từ chính
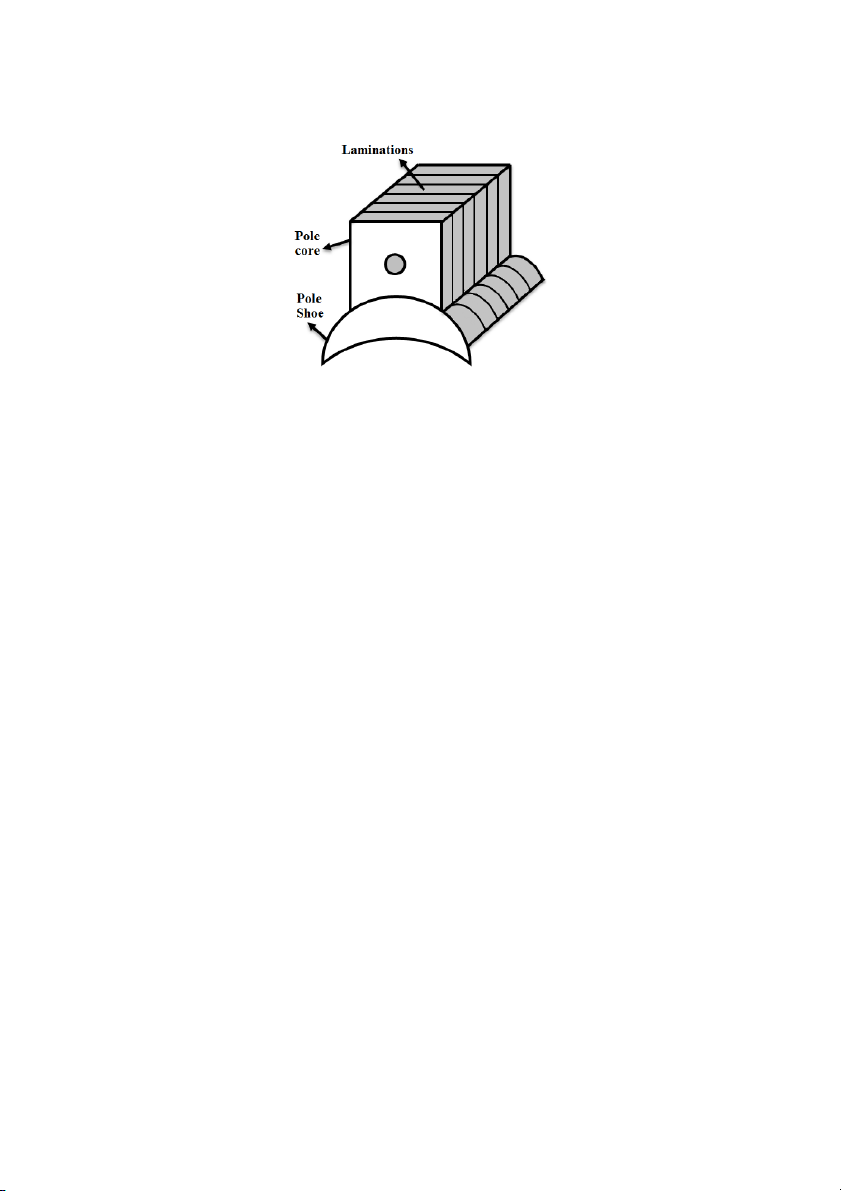
Một cực từ chính gồm: Lõi cực được làm bằng các lá thép điện kỹ thuật ghép lại,
mặt cực có nhiệm vụ làm cho từ thông dễ đi qua khe khí. Cuộn dây kích từ đặt trên lõi
cực cách điện với thân cực bằng một khuôn cuộn dây cách điện. Cuộn dây kích từ làm
bằng dây đồng có tiết diện tròn, cuộn dây được tẩm sơn cách điện nhằm chống thấm nước và tăng độ dẫn nhiệt.
Để tản nhiệt tốt cuộn dây được tách ra thành những lớp, đặt cách nhau một rãnh làm mát. 2. Cực từ phụ
Cực từ phụ nằm giữa các cực từ chính, thông thường số cực phụ bằng ½ số cực
chính. Lõi thép cực phụ thường là bột thép ghép lại, ở những máy có tải thay đổi thì lõi
thép cực phụ cũng được ghép bằng các lá thép. Cuộn dây đặt trên lõi thép. Khe khí ở cực
từ phụ lớn hơn khe khí ở cực từ chính.
Hình 1.3: Cực từ trong động cơ một chiều 3. Gông từ
Gông từ dùng làm mạch từ nối liền các cực từ, đồng thời làm vỏ máy. Trong động
cơ điện nhỏ và vừa thường dùng thép dày uốn và hàn lại, trong máy điện lớn thường dùng
thép đúc. Có khi trong động cơ điện nhỏ dùng gang làm vỏ máy.
4. Cơ cấu chổi than
Để đưa dòng điện từ phần quay ra ngoài. Cơ cấu chổi than bao gồm có chổi than
đặt trong hộp chổi than nhờ một lò xo tì chặt lên cổ góp. Hộp chổi than được cố định trên
giá chổi than và cách điện với giá. Giá chổi than có thể quay được để điều chỉnh vị trí
chổi than cho đúng chỗ, sau khi điều chỉnh xong thì dùng vít cố định lại. Rotor
Rotor của máy điện một chiều là phần ứng. Ngày nay người ta dùng chủ yếu là
loại rôto hình trống có răng được ghép lại bằng các lá thép điện kỹ thuật. Ở những máy
công suất lớn người ta còn làm các rãnh làm mát theo bán kính (các lá thép được ghép lại
từng tệp, các tệp cách nhau một rãnh làm mát). Hình 1.4: Rotor
1. Lõi sắt phần ứng
Dùng để dẫn từ, thường dùng những tấm thép kỹ thuật điện dày 0,5mm phủ cách
điện mỏng ở hai mặt rồi ép chặt lại để giảm tổn hao do dòng điện xoáy gây nên. Trên lá
thép có dập hình dạng rãnh để sau khi ép lại thì đặt dây quấn vào. Trong những động cơ
trung bình trở lên người ta còn dập những lỗ thông gió để khi ép lại thành lõi sắt có thể
tạo được những lỗ thông gió dọc trục. Trong những động cơ điện lớn hơn thì lõi sắt
thường chia thành những đoạn nhỏ, giữa những đoạn ấy có để một khe hở gọi là khe hở
thông gió. Khi máy làm việc gió thổi qua các khe hở làm nguội dây quấn và lõi sắt. Trong
động cơ điện một chiều nhỏ, lõi sắt phần ứng được ép trực tiếp vào trục. Trong động cơ
điện lớn, giữa trục và lõi sắt có đặt giá rôto. Dùng giá rôto có thể tiết kiệm thép kỹ thuật
điện và giảm nhẹ trọng lượng rôto. 2. Cổ góp
Cuộn dây rôto là cuộn dây khép kín, mỗi cạnh của nó được nối với phiến góp. Các
phiến góp được ghép cách điện với nhau và với trục hình thành một cổ góp. Phiến góp
được làm bằng đồng, vừa có độ dẫn điện tốt vừa có độ bền cơ học, chống mài mòn. Hình 1.5: Cổ góp 3. Thiết bị chổi
Để đưa dòng điện ra ngoài phải dùng thiết bị chổi gồm: chổi than được làm bằng
than granit vừa đảm bảo độ dẫn điện tốt vừa có khả năng chống mài mòn, bộ giữ chổi
được làm bằng kim loại gắn vào stato, có lò so tạo áp lực chổi và các thiết bị phụ khác.
4. Dây quấn phần ứng
Dây quấn phần ứng là phần phát sinh ra suất điện động và có dòng điện chạy qua.
Dây quấn phần ứng thường làm bằng dây đồng có bọc cách điện. Trong máy điện nhỏ có
công suất dưới vài kW thường dùng dây có tiết diện tròn. Trong máy điện vừa và lớn
thường dung dây tiết diện chữ nhật. Dây quấn được cách điện cẩn thận với rãnh của lõi
thép. Để tránh khi quay bị văng ra lực li tâm, ở miệng rãnh có dùng nệm để đè chặt hoặc
đai chặt dây quấn. Nệm thường làm bằng tre, gỗ…
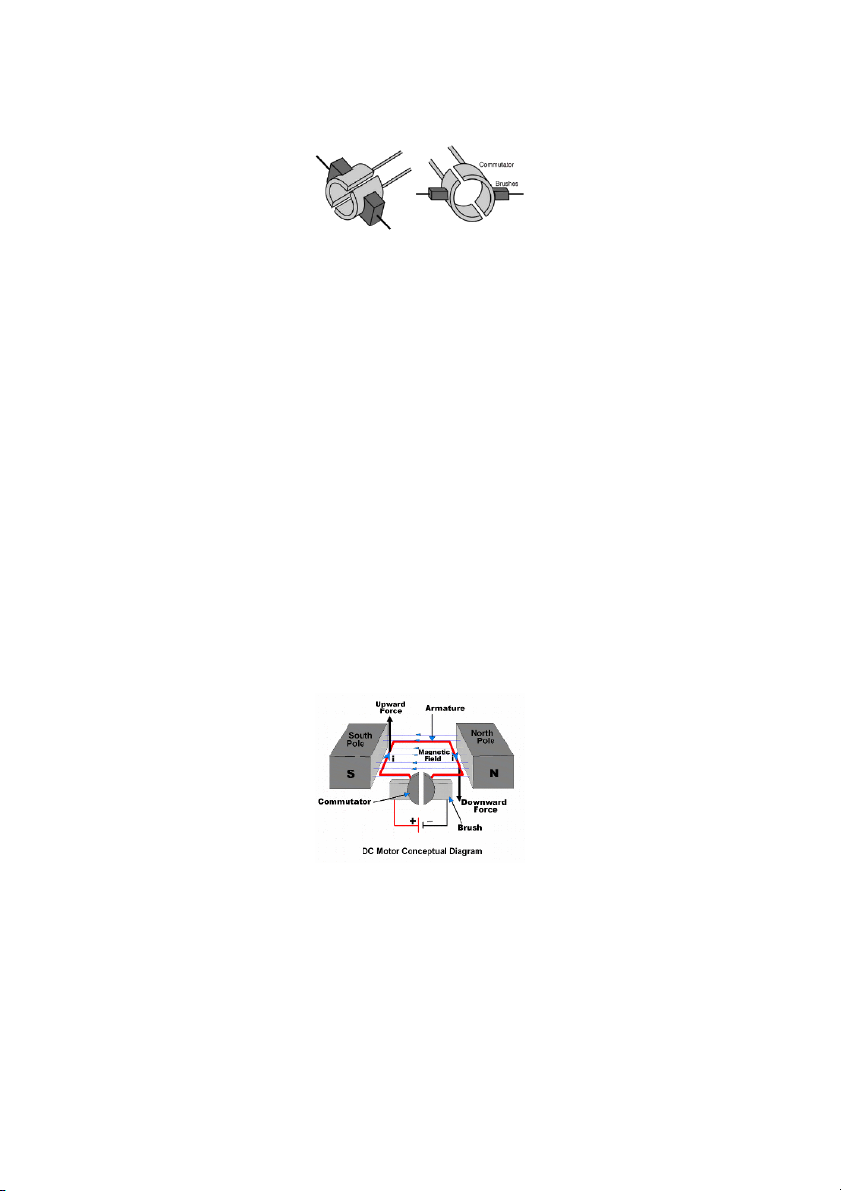
Nguyên lý làm việc của động cơ một chiều kích từ độc lập
Khi cho điện áp một chiều vào, trong dây quấn phần ứng có điện. Các thanh dẫn
có dòng điện nằm trong từ trường sẽ chịu lực tác dụng làm rôto quay, chiều của lực được
xác định bằng quy tắc bàn tay trái.
Hình 1.6: Nguyên lý tạo ra từ trường quay động cơ một chiều
Khi phần ứng quay được nửa vòng, vị trí các thanh dẫn đổi chỗ cho nhau. Do có
phiếu góp chiều dòng điện dữ nguyên làm cho chiều lực từ tác dụng không thay đổi. Khi
quay, các thanh dẫn cắt từ trường sẽ cảm ứng với suất điện động Eư chiều của suất điện
động được xác định theo quy tắc bàn tay phải, ở động cơ chiều suất điện động Eư ngược
chiều dòng điện Iư nên Eư được gọi là sức phản điện động.
Đặc tính cơ của động cơ điện một chiều kích từ độc lập
Động cơ điện một chiều kích từ độc lập có cấu tạo hai phần riêng biệt: phần bố trí
ở phần tĩnh có các cuộn dây kích từ sinh ra từ thông Ф, phần ứng là phần quay nối với
điện áp lưới qua vành góp và chổi than. Tác động giữa từ thông Ф và dòng điện phần ứng
tạo nên momen quay động cơ. Khi động cơ quay các thanh dẫn phần ứng cắt qua từ thông
tạo nên sức điện động .
Sơ đồ nguyên lý của động cơ điện kích từ độc lập được trình bày trên hình 1.7.
Hình 1.7: Sơ đồ nguyên lý động cơ điện một chiều kích từ độc lập.
Xây dựng phương trình đặc tính cơ điện một chiều kích từ độc lập
Ta có phương trình cân bằng điện áp của mạch phần ứng như sau:
U E R R I u u u f u (1.1) Trong đó:
Uư: Điện áp phần ứng (V)
Eư: Sức điện động phần ứng (V)
Rư: Điện trở mạch phần ứng ( )
Iư: Dòng điện của mạch phần ứng (A)
Với: Rư = rư + rcf + rb + rct
rư: Điện trở cuộn dây phần ứng
rcf: Điện trở cuộn dây cực từ phụ
rb: Điện trở tiếp xúc cuộn bù
rct: Điện trở tiếp súc của chổi điện
Sức điện động Eư của phần ứng động cơ được xá c định theo biểu thức: p.N E . . K .. (1.2) 2 a Trong đó:
p: Số đôi cực từ chính
N: Số thanh dẫn tác dụng của cuộn dây phần ứng
a: Số đôi mạch nhánh song song của cuộn dây phần ứng
: Từ thông kích từ dưới một cực từ
: Tốc độ góc (rad/s) p. N
K = 2 a : Hệ số cấu tạo của động cơ Từ (1.1) và (1.2) ta có: U R R u f u .I (1.3) K. . u K
Biểu thức trên là phương trình đặc tính cơ điện của động cơ. Mặt khác, mô men
điện từ Mđt của động cơ được xác định bởi:
M K ..I dt u (1.4) M dt I Với u K . .
Thay giá trị Iư vào (1.3) ta có: U R R u f u M (1.5) 2 K. ( . K ) dt
Nếu bỏ qua tổn thất cơ và tổn thất thép thì mômen cơ trên trục động cơ bằng mô
men điện từ, ta ký hiệu là M. Nghĩa là: Mdt = Mcơ = M U R R u u f .M (1.6) 2 . K (K. )
Đây là phương tình đặc tính cơ của động cơ điện một chiều kích từ độc lập.
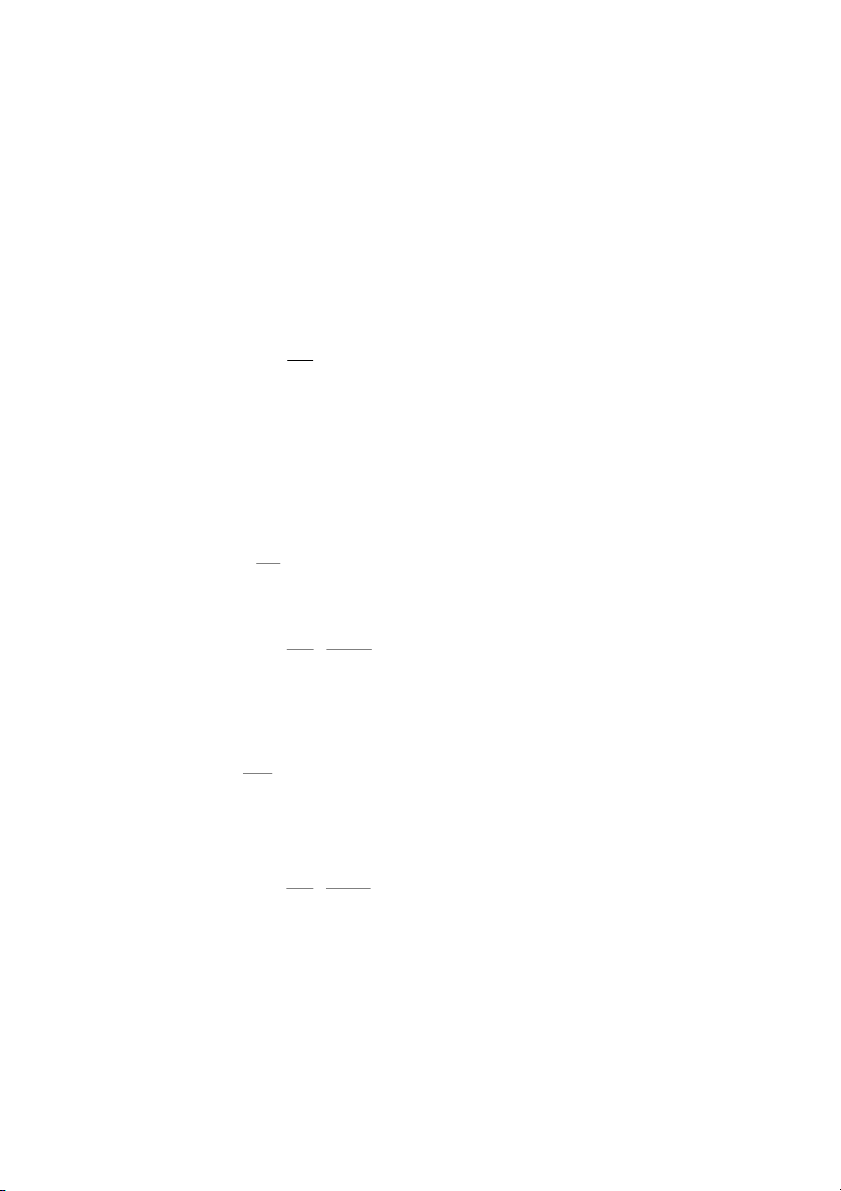
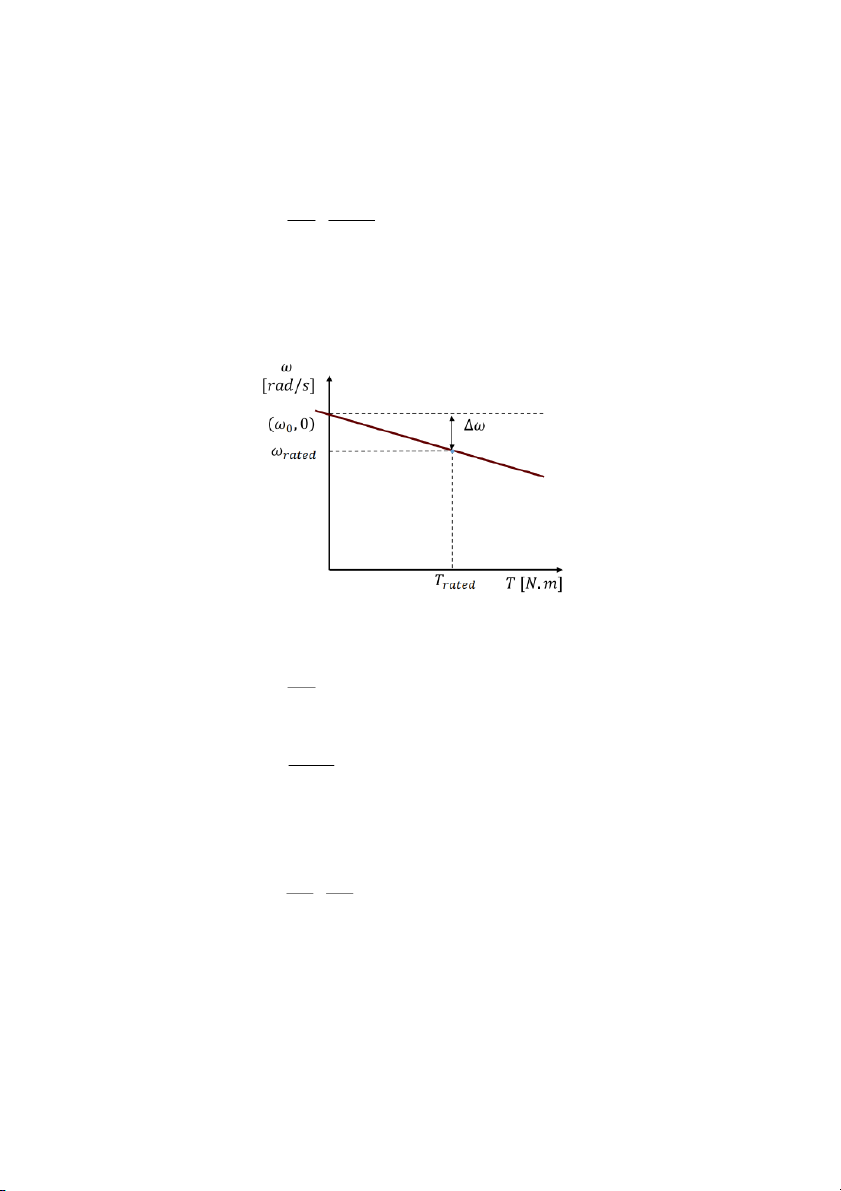
Giả thiết phần ứng được bù đủ, từ thông = const, thì các phương trình đặc tính
cơ điện (1.3) và phương trình đặc tính cơ (1.6) là tuyến tính. Đồ thị của chúng được biểu
diễn trên hình 1.6 là những đường thẳng.
Hình 1.8: Đặc tính cơ của động cơ điện một chiều
Theo các đồ thị trên, khi Iư = 0 hoặc M = 0 ta có: Uu 0 (1.7) . K
0 được gọi là tốc độ không tải lý tưởng của động cơ. Còn khi =0 ta có: U I I u nm (1.8) R R u f
M K..I M nm nm (1.9)
Inm và Mnm được gọi là dòng điện ngắn mạch và mô men ngắn mạch. Ngoài ra
phương trình đặc tính (1.3) và (1.6) cũng có thể được viết dưới dạng: U R u .I (1.10) K. . u o K U R u .M 2 (1.11) . K ( . K ) o Trong đó: R = Rư + Rf Uu 0 K . . R I R.M u 2 K. (K. )
được gọi là độ sụt tốc độ ứng với giá trị của M.
Từ phương trình đặc tính cơ ta thấy có 3 tham số ảnh hưởng đến đặc tính cơ: từ
thông động cơ , điện áp phần ứng Uư, điện trở phần ứng động cơ.
Phương pháp điều chỉnh tốc độ động cơ một chiều.
Về điều chỉnh tốc độ, động cơ điện một chiều có nhiều ưu việt hơn so với các loại
động cơ khác, không những nó có khả năng thay đổi tốc độ một cách dễ dàng mà cấu trúc
mạch lực, mạch điều khiển đơn giản hơn đồng thời đạt được chất lượng điều chỉnh cao
trong dải điều chỉnh tốc độ rộng. Từ phương trình tốc độ: U R u . I (1.12) . K . u K
suy ra để điều chỉnh có thể:
Điều chỉnh điện áp phần ứng
Điều chỉnh bằng cách thêm điện trở phụ vào mạch
Điều chỉnh từ thông 1.1.5.1.
Phương pháp thay đổi điện trở phụ
Nguyên lý điều khiển
Trong phương pháp này người ta giữ U = , = và nối thêm điện trở phụ vào mạch
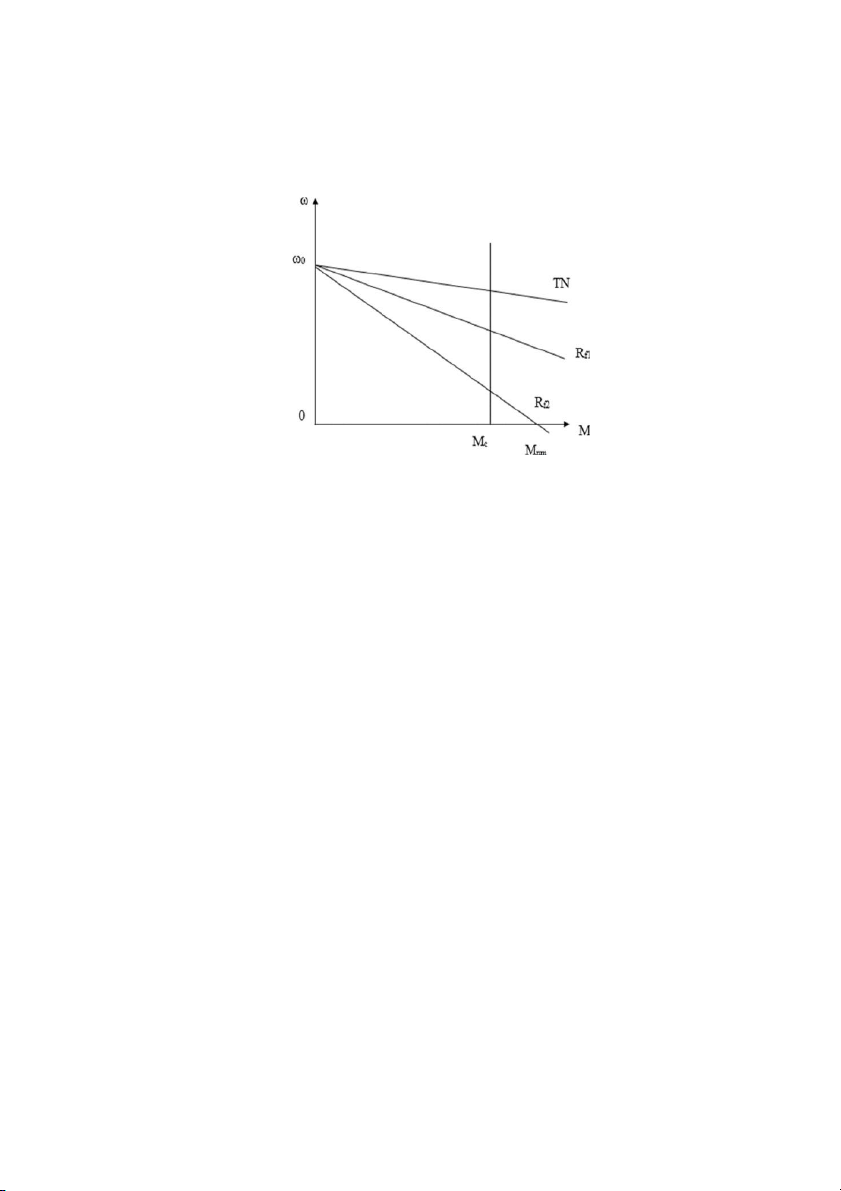
phần ứng để tăng điện trở phần ứng. Độ cứng của đường đặc tính cơ: 2 M (K . ) (1.13) R R u f
Ta thấy khi điện trở càng lớn thì càng nhỏ nghĩa là đặc tính cơ càng dốc và do đó càng mềm hơn.
Hình 1.9: Đặc tính điều chỉnh động cơ bằng cách thay đổi điện trở phụ
Ứng với = 0 ta có độ cứng tự nhiên có giá trị lớn nhất nên đặc tính cơ tự nhiên có
độ cứng lớn hơn tất cả các đường đặc tính cơ có điện trở phụ. Như vậy, khi ta thay đổi ta
được một họ đặc tính cơ thấp hơn đặc tính cơ tự nhiên.
Đặc điểm của phương pháp:
Điện trở mạch phần ứng càng tăng thì độ dốc đặc tính càng lớn, đặc tính cơ
càng mềm, độ ổn định tốc độ càng kém và sai số tốc độ càng lớn.
Phương pháp này chỉ cho phép điều chỉnh tốc độ trong vùng dưới tốc độ
định mức (chỉ cho phép thay đổi tốc độ về phía giảm).
Chỉ áp dụng cho động cơ điện có công suất nhỏ, vì tổn hao năng lượng trên
điện trở phụ làm giảm hiệu suất của động cơ và trên thực tế thường dùng ở
động cơ điện trong cần trục.
Đánh giá các chỉ tiêu: Phương pháp này không thể điều khiển liên tục được
mà phải điều khiển nhảy cấp. Dải điều chỉnh phụ thuộc vào chỉ số mômen
tải, tải càng nhỏ thì dải điều chỉnh D = / càng nhỏ. Phương pháp này có thể
điều chỉnh trong dải D = 3:1
Giá thành đầu tư ban đầu rẻ nhưng không kinh tế do tổn hao trên điện trở
phụ lớn, chất lượng không cao dù điều khiển rất đơn giản.
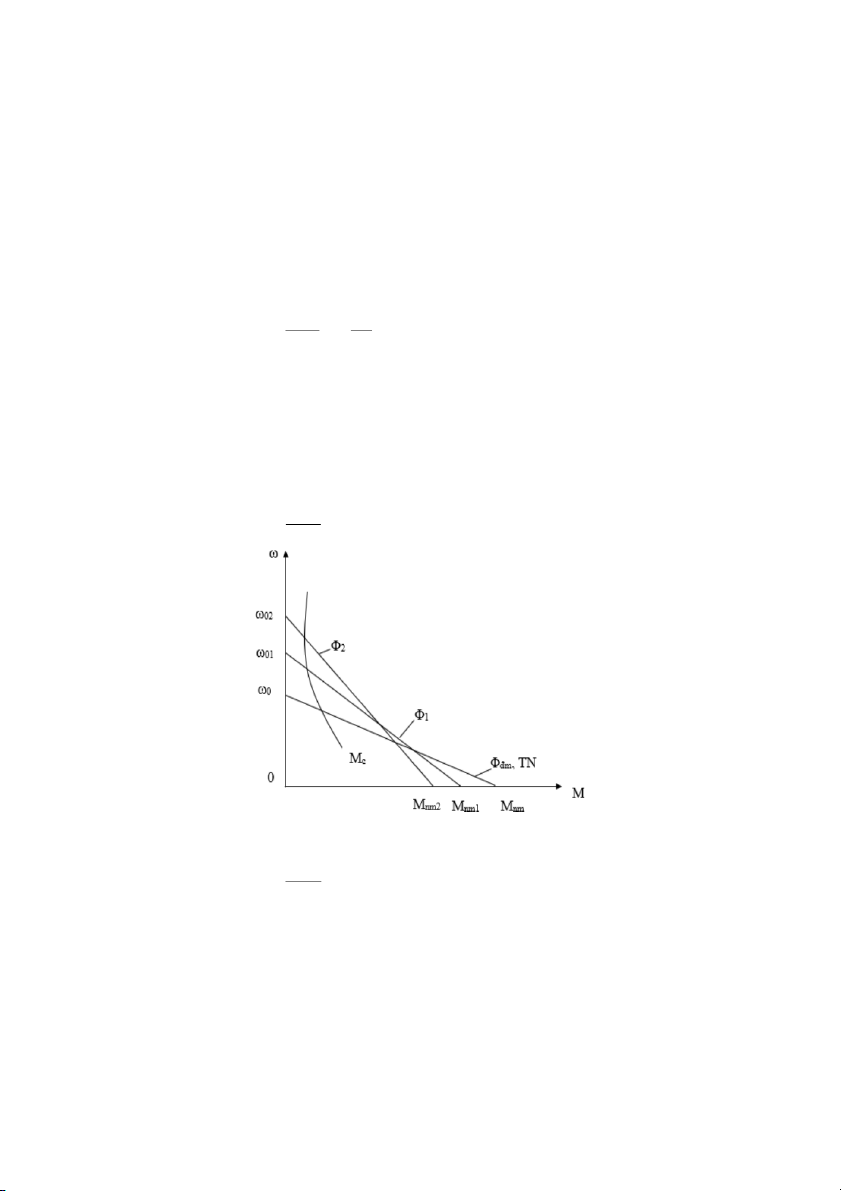
Phương pháp thay đổi từ thông
Điều chỉnh từ thông kích thích của động cơ điện một chiều là điều chỉnh momen
điện từ của động cơ M = K.Φ.Iư và suất điện động quay của động cơ Eư = K.Φ.ω. Mạch
kích từ của động cơ là mạch phi tuyến nên hệ điều chỉnh từ thông cũng là hệ phi tuyến: e d k i . k k (1.14) r r dt b k Trong đó: rk :
điện trở dây quấn kích thích rb :
điện trở của nguồn điện áp kích thích k :
số vòng dây quấn kích thích
Trong chế độ xác lập ta có quan hệ: ek i ; f i k k k (1.15) r r b k
Hình 1.10: Đặc tính điều chỉnh động cơ bằng cách thay đổi từ thông Độ cứng: 2 k (1.16) R
Khi giảm từ thông để tăng tốc độ động cơ thì độ cứng giảm.
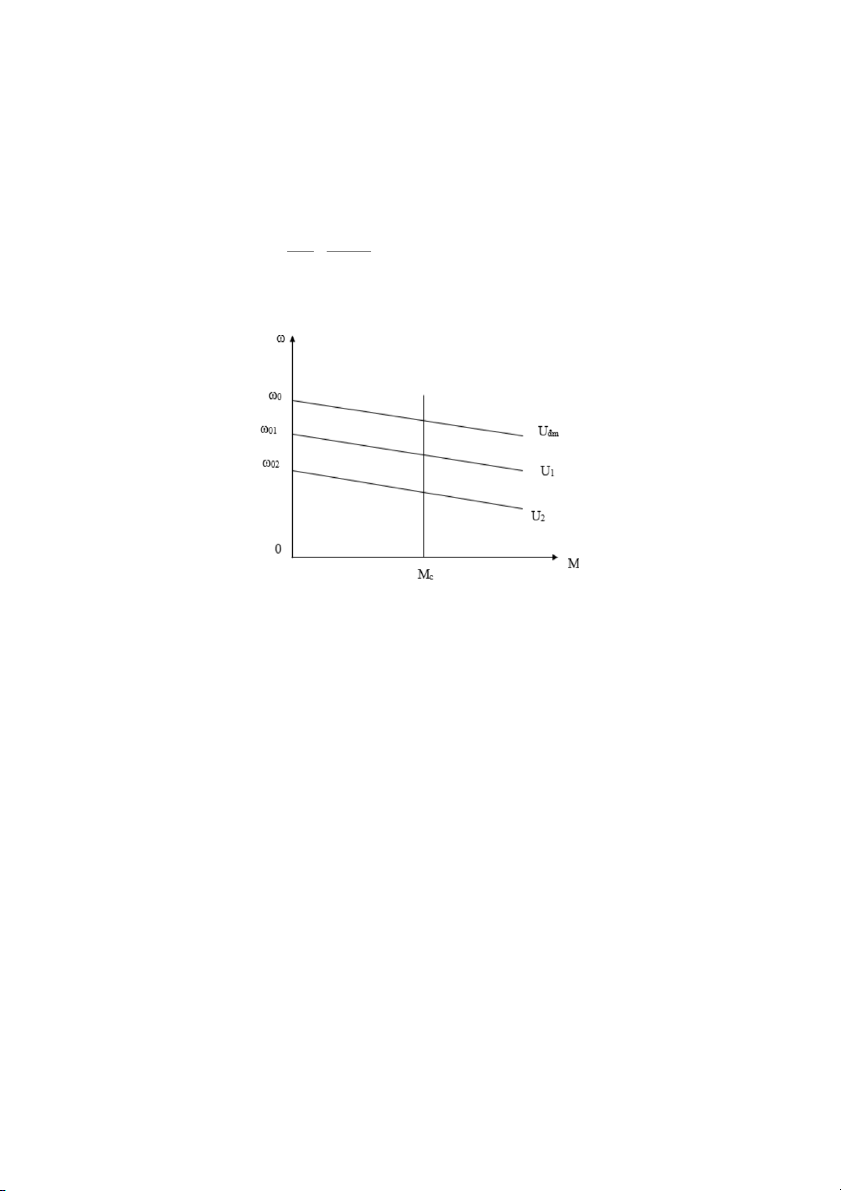
Phương pháp thay đổi điện áp phần ứng.
Giả thiết từ thông Φ = Φdm = const, từ phương trình đặc tính cơ tổng quát: U R u u M . K (1.17) . K 2 0
Khi thay đổi điện áp đặt vào phần ứng động cơ ta được một họ đặc tính cơ song
song với đặc tính cơ tự nhiên.
Hình 1.11: Đặc tính điều chỉnh động cơ bằng cách thay đổi áp phần ứng
Ta thấy rằng, khi thay đổi điện áp (giảm áp) thì momen ngắn mạch, dòng điện
ngắn mạch giảm và tốc độ động cơ cũng giảm với một phụ tải nhất định nhưng độ cứng
không đổi. Do đó phương pháp này được dùng để điều chỉnh tốc độ động cơ và hạn chế
dòng điện khi khởi động.
Nhận xét: Từ các phân tích trên, ta thấy trong các phương pháp điều chỉnh tốc độ
trên thì phương pháp điều chỉnh tốc độ nhờ thay đổi điện áp phần ứng là khả thi và tin
cậy nhất, bởi vì dễ điều chỉnh và có đặc tính cơ cứng. Với sự phát triển của kĩ thuật bán
dẫn ngày nay thì phương pháp điều chỉnh này hoàn toàn dễ dàng thực hiện được và đem
lại hiệu quả cao. Trong khuôn khổ đồ án này, ta sẽ thiết kế bộ băm xung một chiều có đảo
chiều bằng cách thay đổi điện áp phần ứng, ngoài ra nữa còn có thể thực hiện chức năng
mở lại máy (reset) và hãm tái sinh động cơ.
Qua các mạch phân tích ở trên ta thấy để phù hợp đảo chiều động cơ (một cách
chủ động) ta chọn bộ băm xung một chiều có đảo chiều (cầu BXDC), mạch này cho phép
năng lượng đi theo 2 chiều Ud, Id có thể đảo chiều một cách độc lập sử dụng phương pháp
điều khiển không đối xứng
Tài liệu liên quan:
-

Đề cương ôn tập Hệ thống điện | Trường Đại học Điện lực
23 12 -

Giao trình Cung Cấp Điện - Tài Liệu Học Tập Đầy Đủ
33 17 -

Đồ án hệ thống cơ điện tử | Trường Đại học Điện Lực
707 354 -
Đề thi trắc nghiệm môn Linh kiện điện tử bản chính | Trường đại học Điện Lực
2.1 K 1.1 K -

Lý thuyết kĩ thuật vi xử lý - EPU | Điện chuyên ngành | Trường đại học Điện Lực
855 428