Hệ thống truyền động Servo | Môn Hệ thống truyền động - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Hệ thống truyền động Servo Môn Hệ thống truyền động. Tài liệu được sưu tầm gồm 34 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: hệ thống truyền động (ME3145) 10 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:


Preview text:
lOMoAR cPSD| 58702377
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP.HCM
KHOA ĐÀO TẠO CHẤT LƯỢNG CAO
----- 🙞🙜🕮🙞🙜 -----
BÁO CÁO THỰC TẬP
HỆ THỐNG TRUYỀN ĐỘNG SERVO
GVHD: Th.S Võ Lâm Chương Nhóm: 15 CLC – sáng th ứ 5 SVTH: Ph ạ
m Gia Thi ề u – 22146 230 Tr ầ
n Th ị L ệ Quyên – 22146205 Nguy ễ
n Văn Tu ấ n Anh – 22146071 Nguy ễ
n Đăng Quang – 22146 201
TP. H ồ Chí Minh, ngày 0 8 tháng 0 3 năm 202 5 lOMoAR cPSD| 58702377 MỤC LỤC
Bài 3: HỆ THỐNG SERVO ĐA TRỤC SỬ DỤNG AC SERVO MOTOR
VÀ MODULE ĐIỀU KHIÊN CHUYÊN ĐỘNG ............................................ 4
3.1. Cơ sở lý thuyết ......................................................................................... 4
3.2. Giới thiệu hệ thống: ................................................................................. 4
3.2.1. Phần cứng: ......................................................................................... 4
3.2.2. Module điều khiển chuyển động trục FX3U-20SSC-H: .................. 5
3.2.3. Melservo MR-J3-B: ........................................................................... 7
3.2.4. Cáp SSCNET III: ............................................................................ 10
3.3. Thực nghiệm: ......................................................................................... 11
3.3.1. Sơ đồ kết nối: ................................................................................... 11
3.3.2. Tiến hành thí nghiệm: ..................................................................... 12
Bài 4: HỆ THỐNG SERVO THỦY LỰC ...................................................... 20
4.1. Cơ sở lý thuyết: ...................................................................................... 20
4.2. Giới thiệu về mô hình servo thủy lực: .................................................. 20
4.2.1. Tổng quát về mô hình: .................................................................... 20
4.2.2. Cấu tạo và chức năng của mô-đun truyền động tuyến tính: ......... 21
4.2.3. Cấu tạo và chức năng của van điều khiển hướng: ......................... 24
4.2.4. Bộ nguồn thuỷ lực: .......................................................................... 26
4.3. FX2N-2AD: ............................................................................................ 27
4.3.1. Giới thiệu: ........................................................................................ 27
4.3.2. Kết nối phần cứng: nối dây FX2N-2AD .......................................... 28
4.3.3. Xác định Gain và offset: .................................................................. 28
4.3.4. Phân bổ bộ nhớ đệm (BFM): .......................................................... 29
4.4. FX2N-4DA: ............................................................................................ 29
4.4.1. Giới thiệu: ........................................................................................ 29
4.4.2. Kết nối phần cứng: dây FX2N-4DA ................................................ 29
4.4.3. Thông số kĩ thuật: ............................................................................ 30 lOMoAR cPSD| 58702377
4.4.4. Phân bổ bộ nhớ đệm (BFM): .......................................................... 30
4.5. CẤU TRÚC ĐIỀU KHIỂN PID (PNC88): ........................................... 31
4.5.1. Giới thiệu: ........................................................................................ 31
4.5.2. Thông số kĩ thuật: ............................................................................ 32
4.6. Thực nghiệm: ......................................................................................... 33
4.6.1. Sơ đồ khối bộ điều khiển: ................................................................ 33 4.6.2.
Tiến hành thí nghiệm: ..................................................................... 33
Bài 3: HỆ THỐNG SERVO ĐA TRỤC SỬ DỤNG AC SERVO MOTOR VÀ
MODULE ĐIỀU KHIÊN CHUYÊN ĐỘNG
3.1. Cơ sở lý thuyết
• Động cơ và trình điều khiển servi AC.
• Lập trình PLC Mitsubishi.
• Bộ điều khiển chuyển động FX3U-20SSC-H.
• Nội suy tuyến tính và hình tròn.
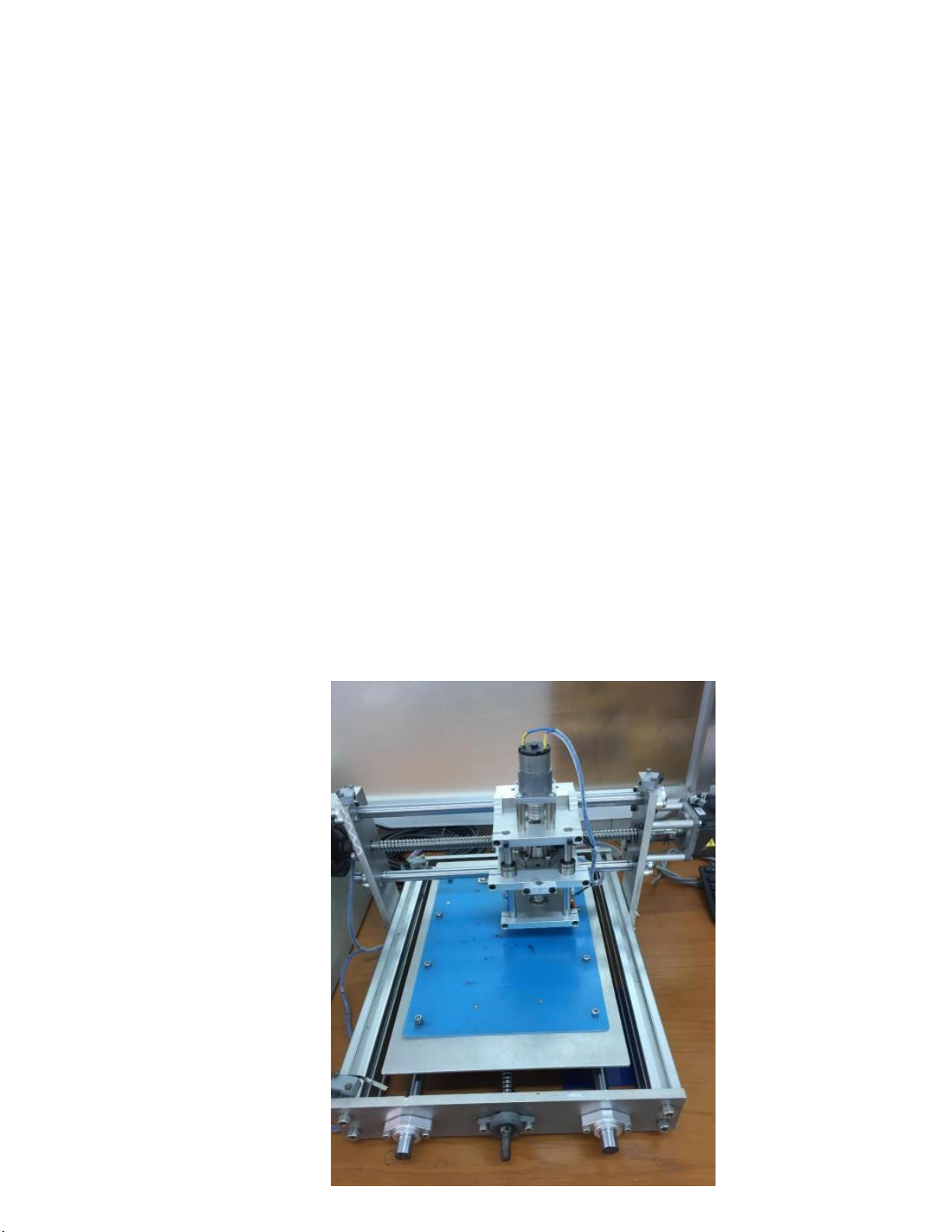
3.2. Giới thiệu hệ thống: 3.2.1. Phần cứng: lOMoAR cPSD| 58702377
Hình 3.1: Hệ thống servo 3 trục sử dụng các mô-đun Mitsubishi
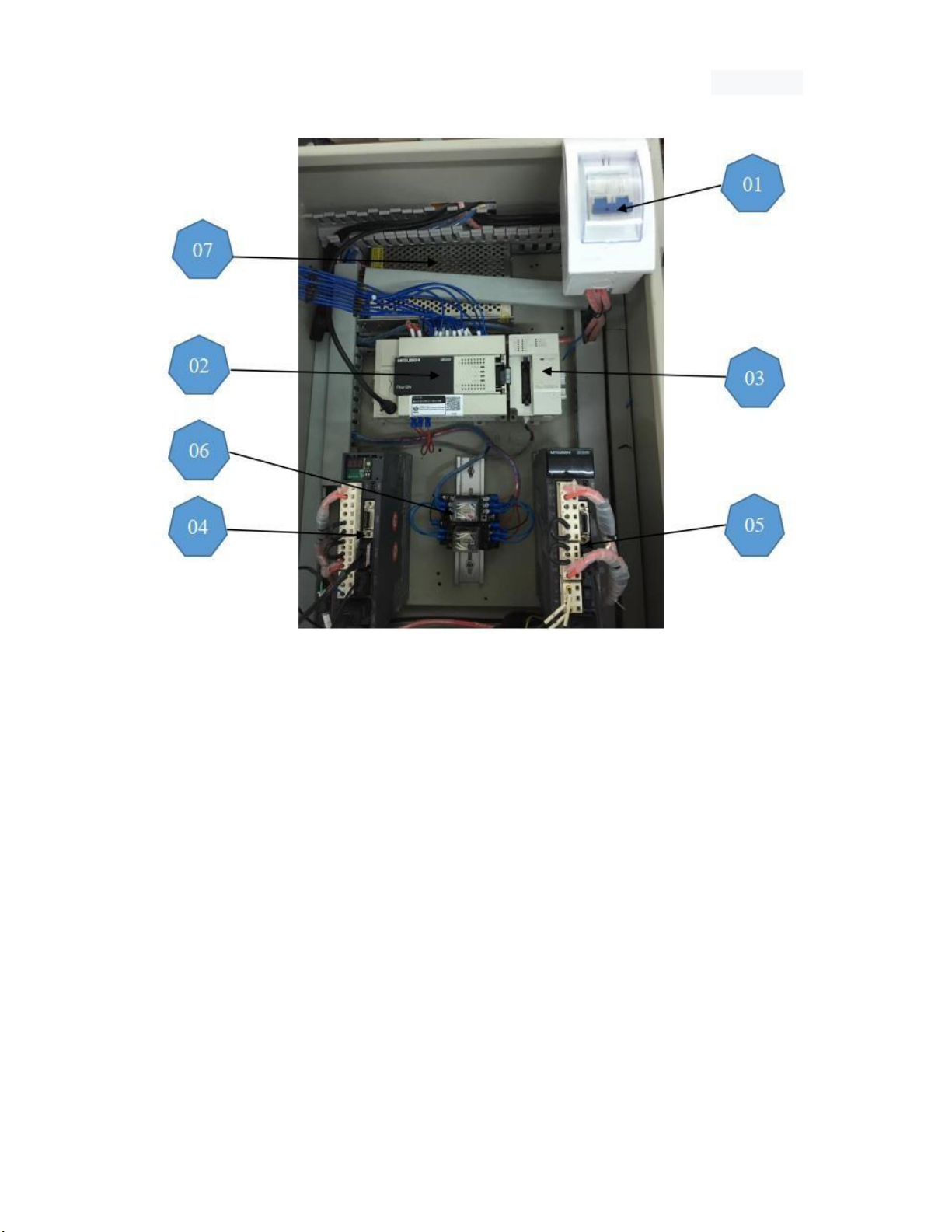
Hình 3.2: Hệ thống điều khiển
Các thành phần chính trong mô hình: 01: Main CB
02: PLC Mitsubishi (FX3U-32M)
03: Module FX3U-20SSC-H
04, 05: Servo Drivers (MR-J3-□B) 06: Relays
07: Power supply 24VDC, 10A
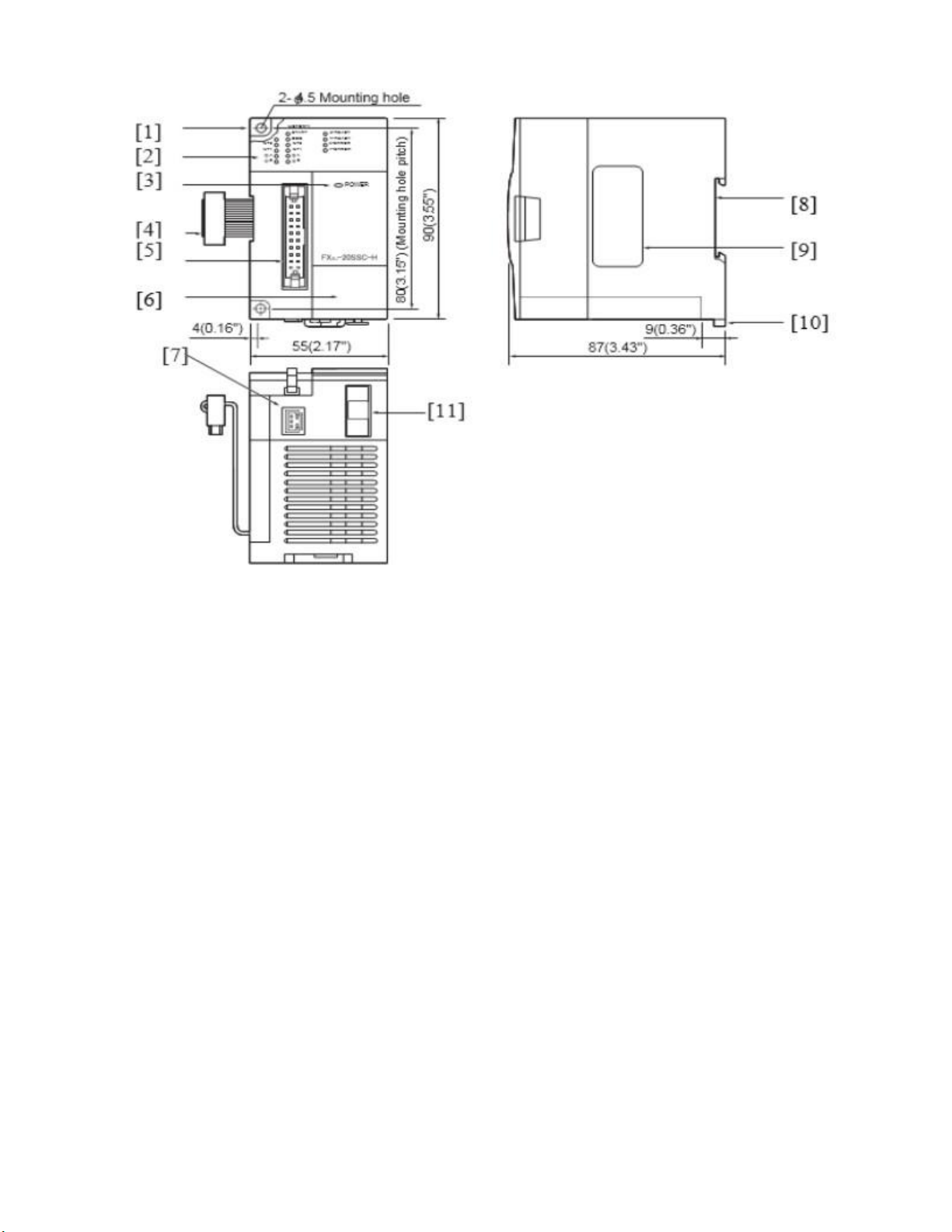
3.2.2. Module điều khiển chuyển động trục FX3U-20SSC-H:
Đây là 1 khối điều khiển vị trí, tốc độ của động cơ AC servo qua cáp
SSCNETIII, tương thích với AC Servo MR-J3-B. Nó có thể điều khiển 2
động cơ AC servo với nội suy đường thẳng và đường tròn. lOMoAR cPSD| 58702377
Hình 3.3: Sơ đồ kết nối FX3U-2SSC-H Chú thích: [1] Lỗ gắn trực tiếp [2] Đèn LED trạng thái
[3] Đèn LED NGUỒN (xanh lục) [4] Cáp nối dài [5] Đầu nối đầu vào
[6] Nắp trên [7] Đầu nối nguồn điện [8] Rãnh gắn ray DIN [9] Bảng tên [10] Móc gắn thanh ray DIN [11] Đầu nối SSCNET III • Kết nối PLC:
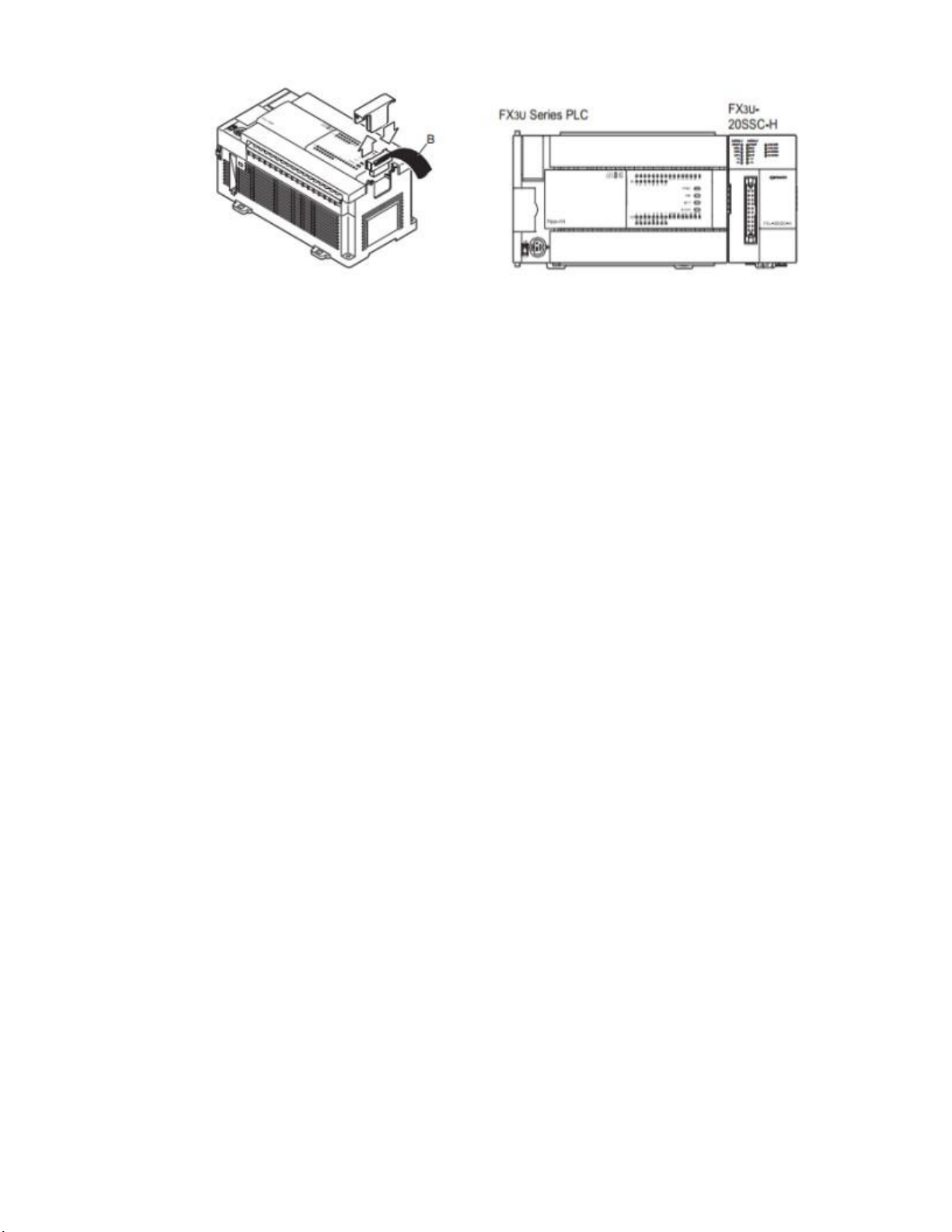
FX3U – 20SSC-H được kết nối với PLC bằng phần mở rộng. lOMoAR cPSD| 58702377
Hình 3.4: Kết nối FX3U-2SSC-H với PLC
• Bộ nhớ đệm (BFM): PLC có thể truy cập bộ nhớ đệm trực tiếp, sử dụng các
chương trình tuần tự. 20SSC-H sử dụng các tham số định vị và dữ liệu trong
khu vực này để thực hiện điều khiển định vị.
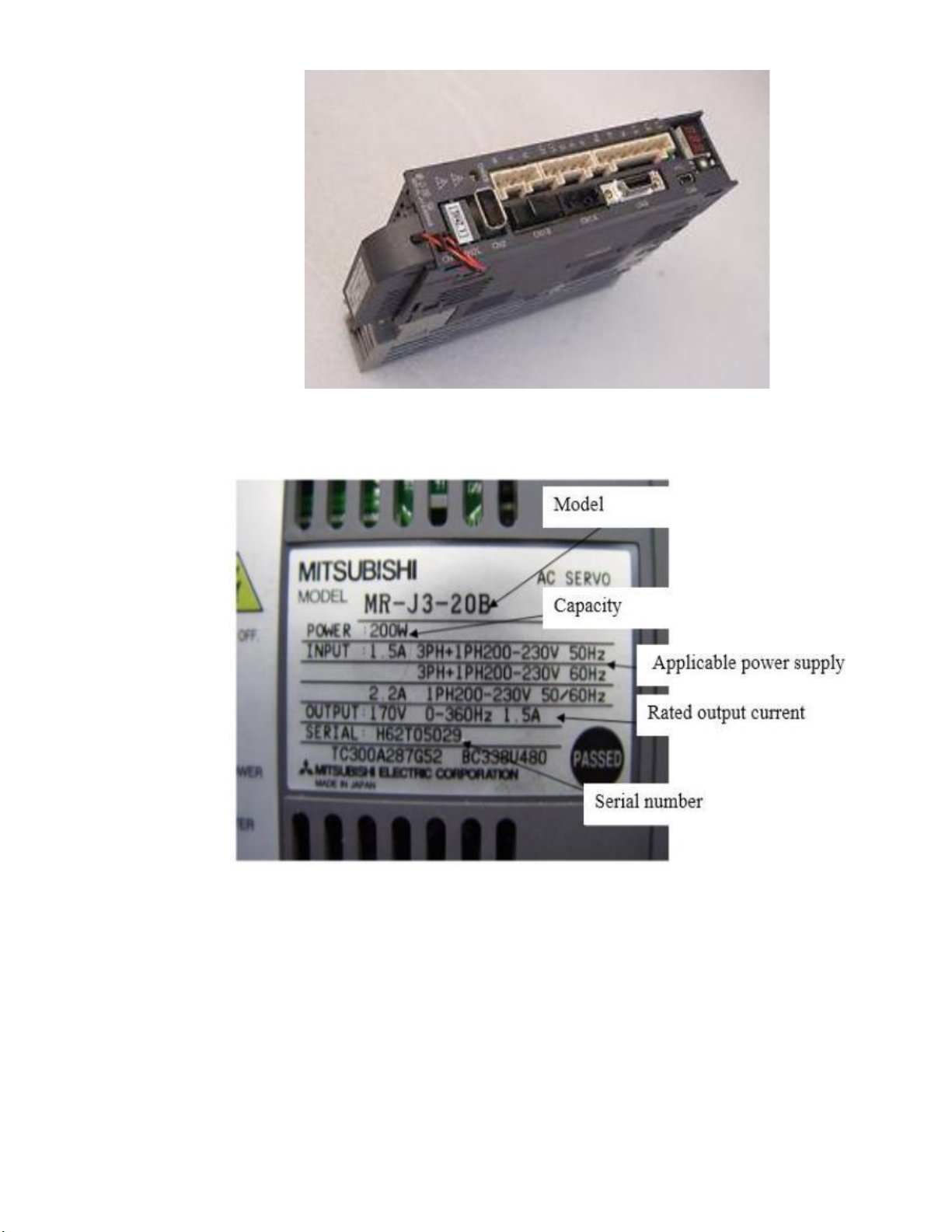
3.2.3. Melservo MR-J3-B: • Giới thiệu:
+) Dòng servo Mitsubishi cao cấp với tính năng vượt trội, độ chính xác cao.
+) Bộ điều khiển tốc độ cao với tần số đáp ứng lớn 2100 Hz, Endcoder
độ phân giải lên tới 18 bit(262144/rev).
+) Có khả năng tự động nhận diện động cơ Servo, tang cường tốc độ
đáp ứng nâng thêm dải tốc độ và moment động cơ.
+) Có thể đấu dây Servo MR-J3 series đơn giản.
+) Melservo MR-J3 có chức năng giao tiếp USB, sử dụng PC để thực
hiện cài đặt thông số, giám sát trạng thái, kiểm soát độ lợi và AC servo
thông qua phần mềm MR Configurator.
+) MELSERVO-J3-□B có mã hóa vị trí tuyệt đối với độ phân giải
xung / vòng lặp 262144 để đảm bảo kiểm soát chính xác hơn MELSERVO-J2-Super. lOMoAR cPSD| 58702377
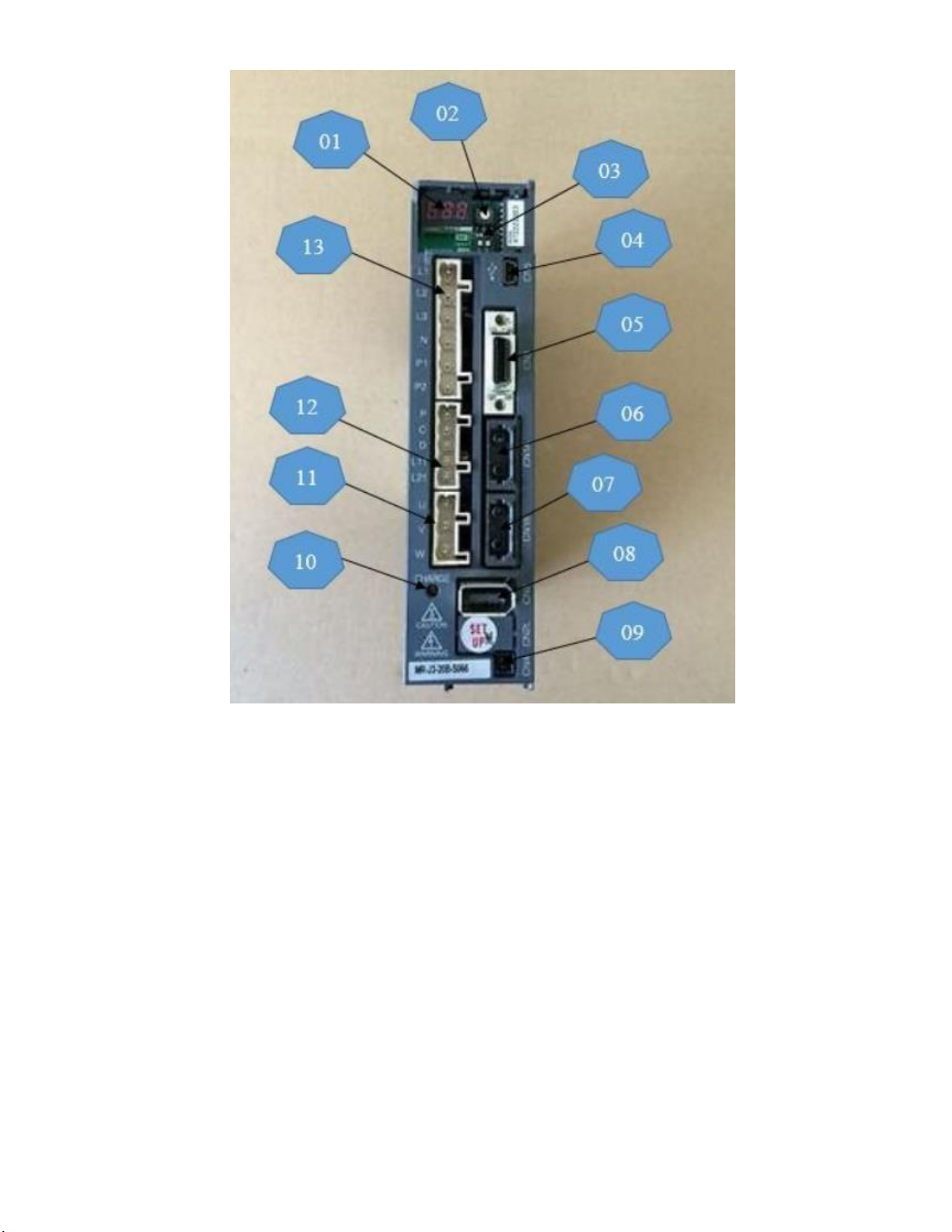
Hình 3.5: Melservo MR-J3-20B • Cấu trúc:
Hình 3.6: Mã định nghĩa của AC Servo MR-J3-20B lOMoAR cPSD| 58702377
Hình 3.7: Cấu trúc của Melservo MR-J3-20B 01: Màn hình 08: CN2 02: SW1 09: CN4 03: SW2 10: Đèn sạc 04: CN5 11: CNP3 05: CN3 12: CNP2 06: CN1A 13: CNP1 07: CN1B
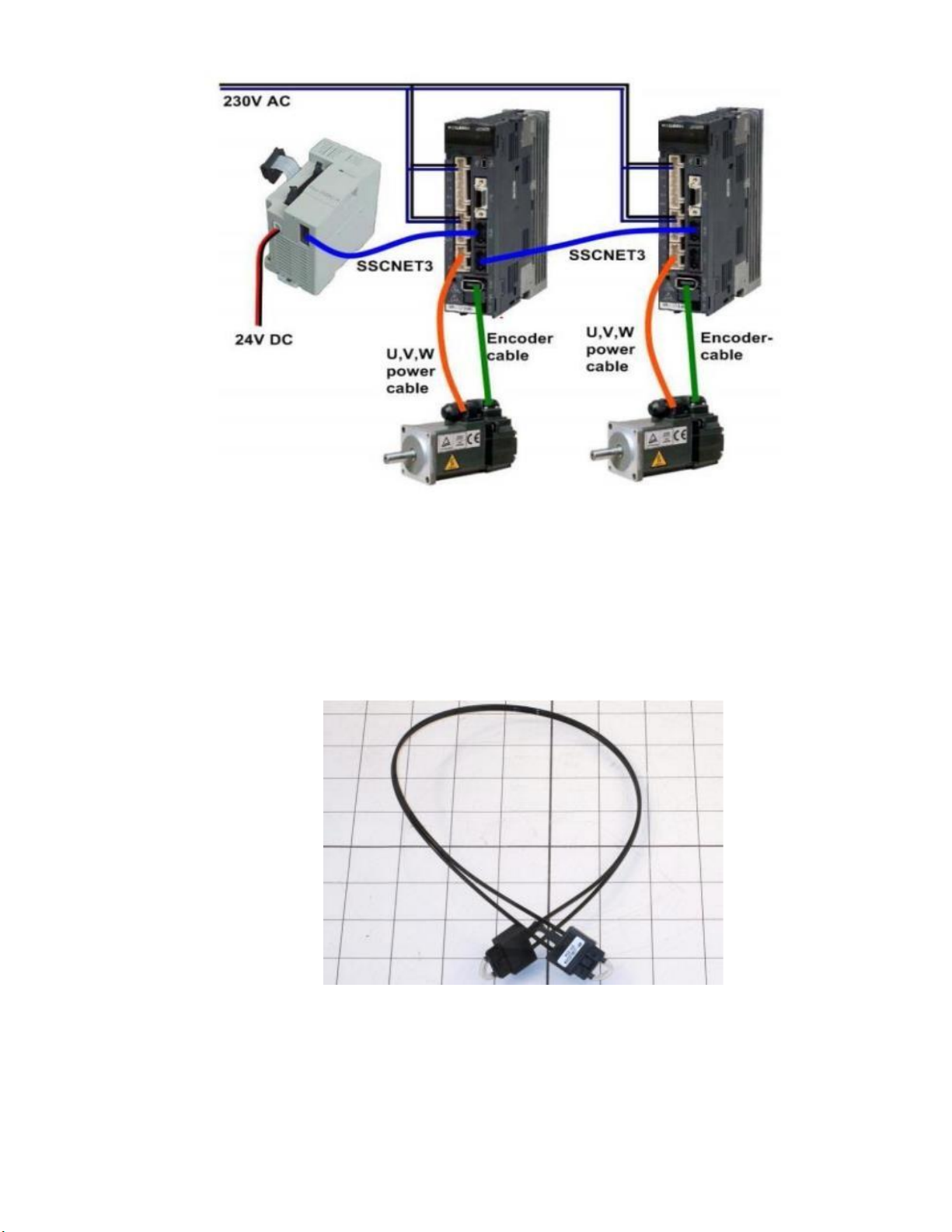
• Kết nối phần cứng: lOMoAR cPSD| 58702377
Hình 3.8: Sơ đồ kết nối giữa Melservo và FX3U-20SSC-H
3.2.4. Cáp SSCNET III: sử dụng giao tiếp quang, giao tiếp hai chiều với
tốc độ truyền tải cao. Đây là loại cáp chuyên dụng có thể kết nối và ngắt
kết nối dễ dàng. Vì sử dụng phương thước thông tin quang học nên có
khả bị nhiễu cao.
Hình 3.9: Cáp SSCNET III 3.3. Thực nghiệm:
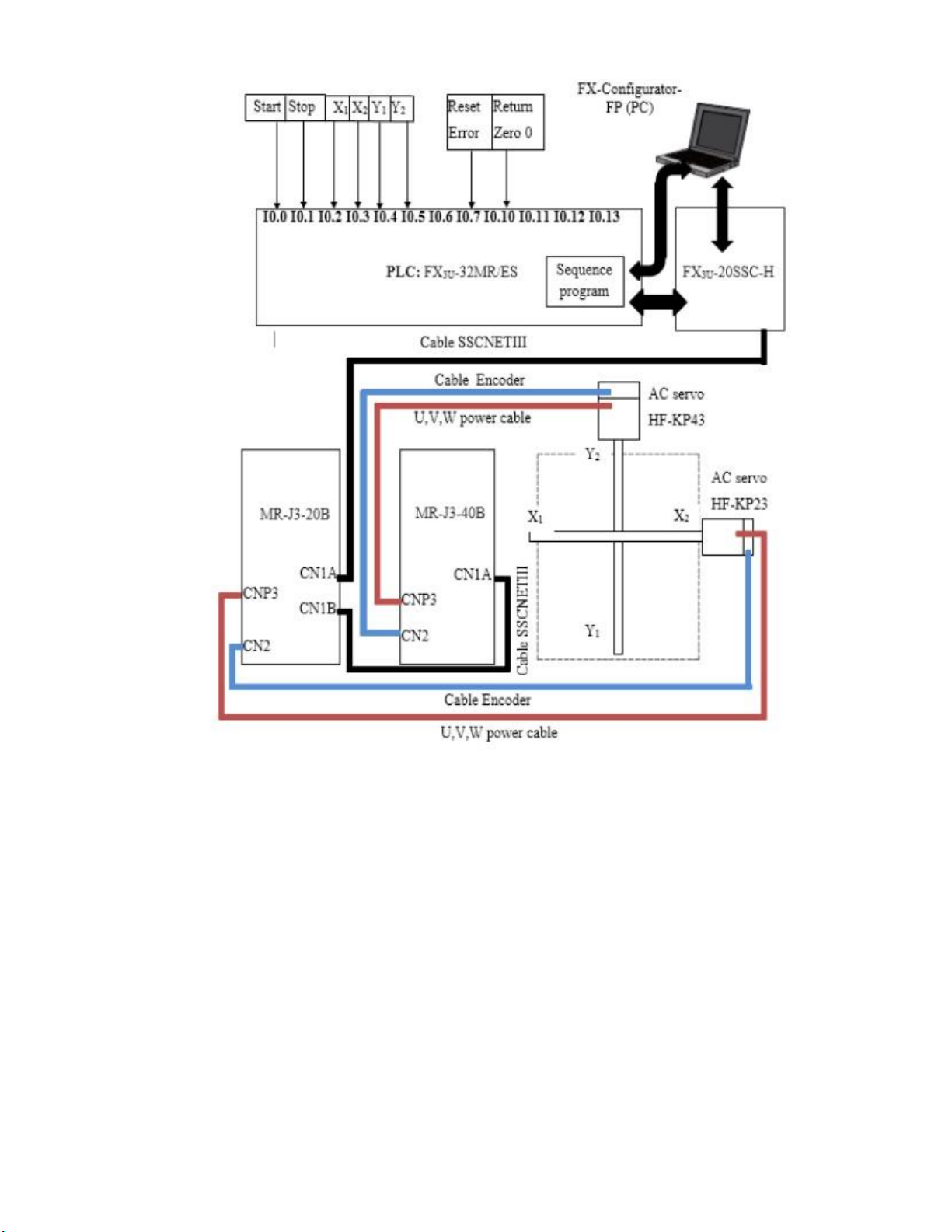
3.3.1. Sơ đồ kết nối: lOMoAR cPSD| 58702377
Hình 3.10: Sơ đồ nguyên lí điều khiển của mô hình
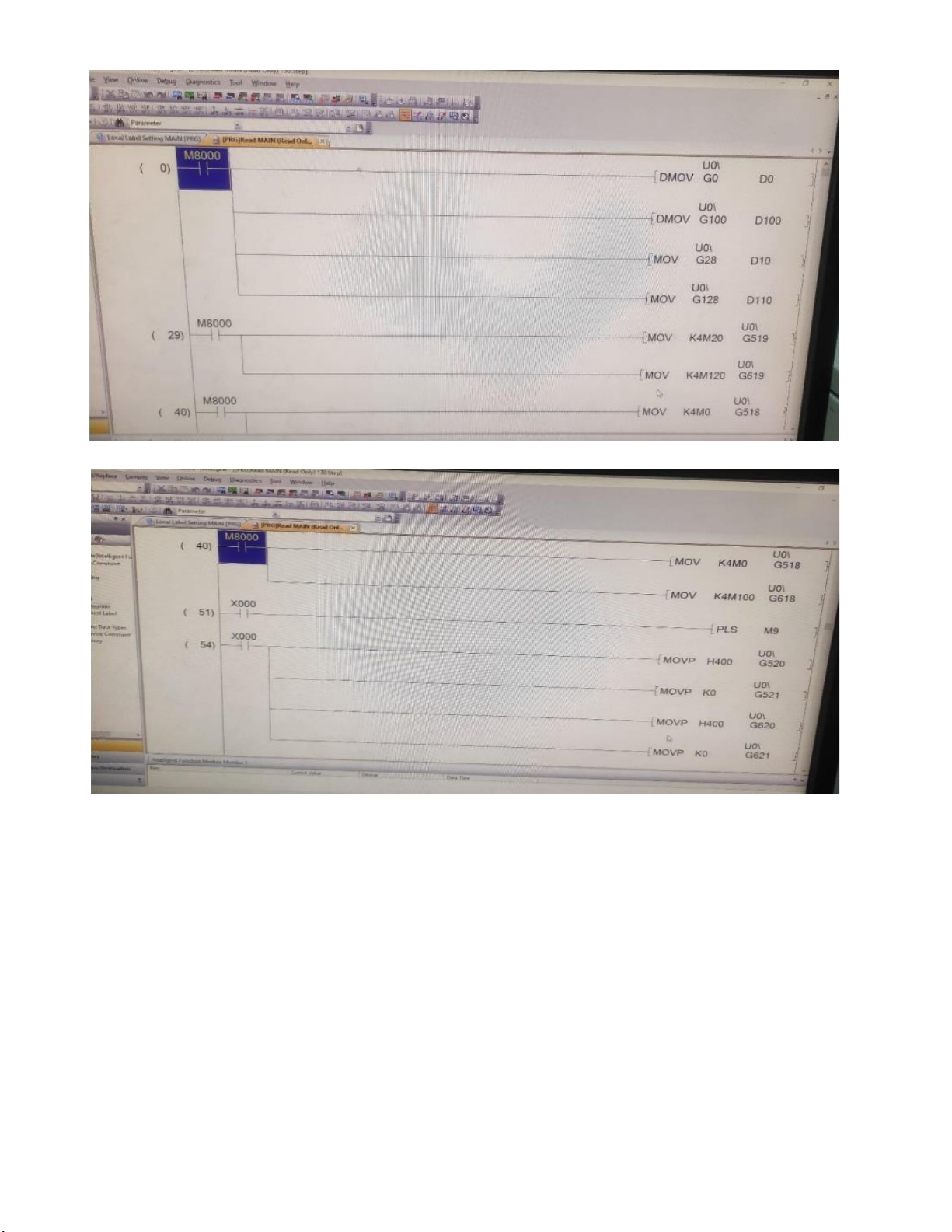
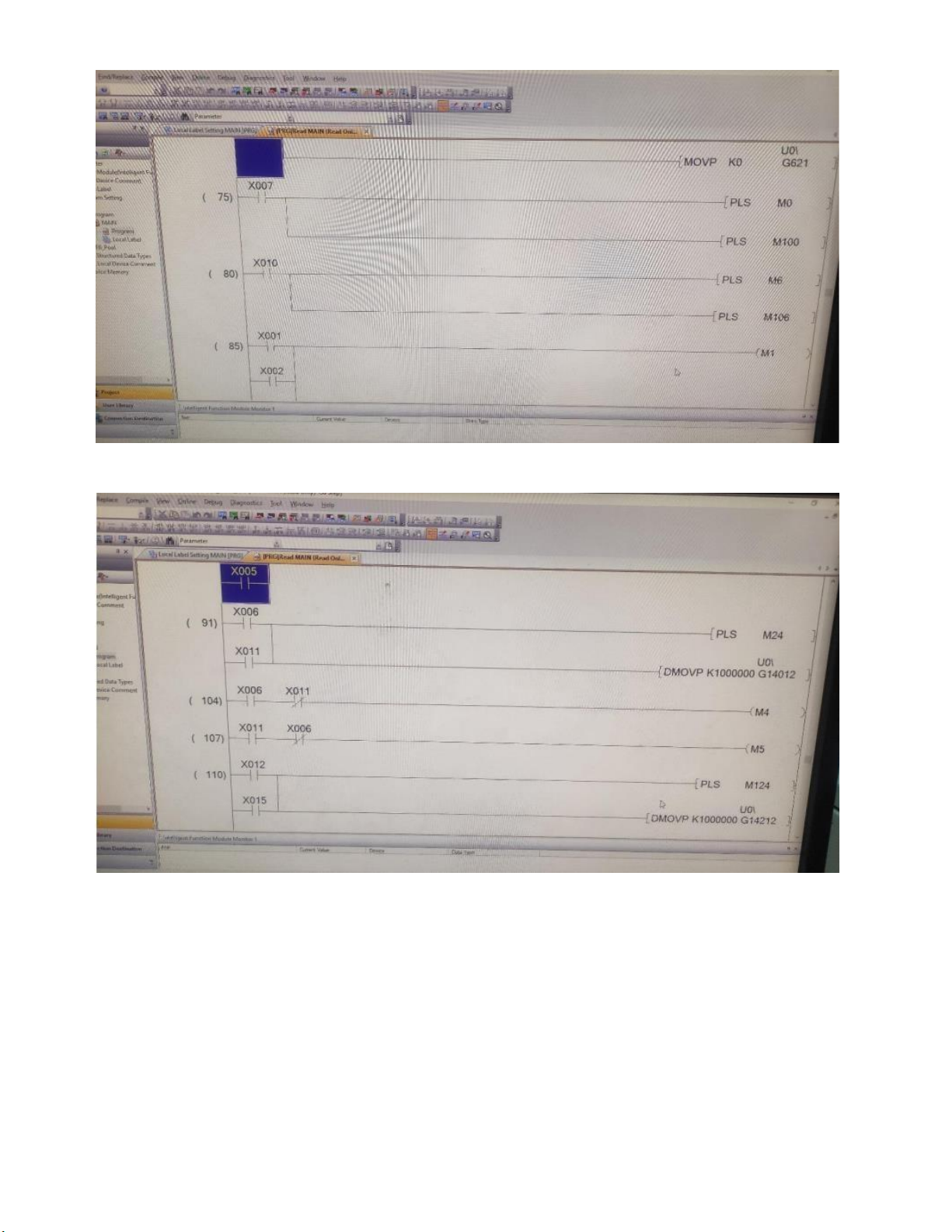
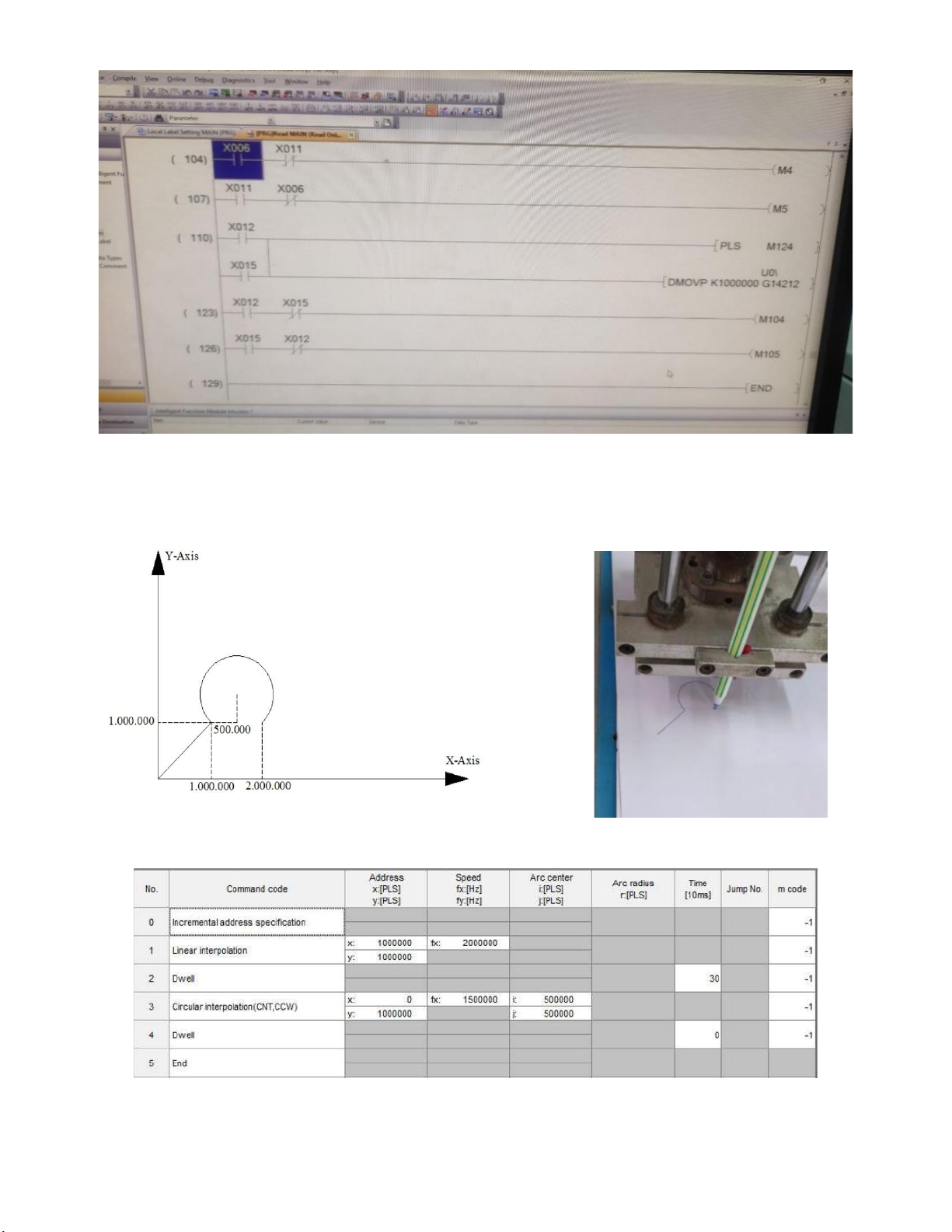
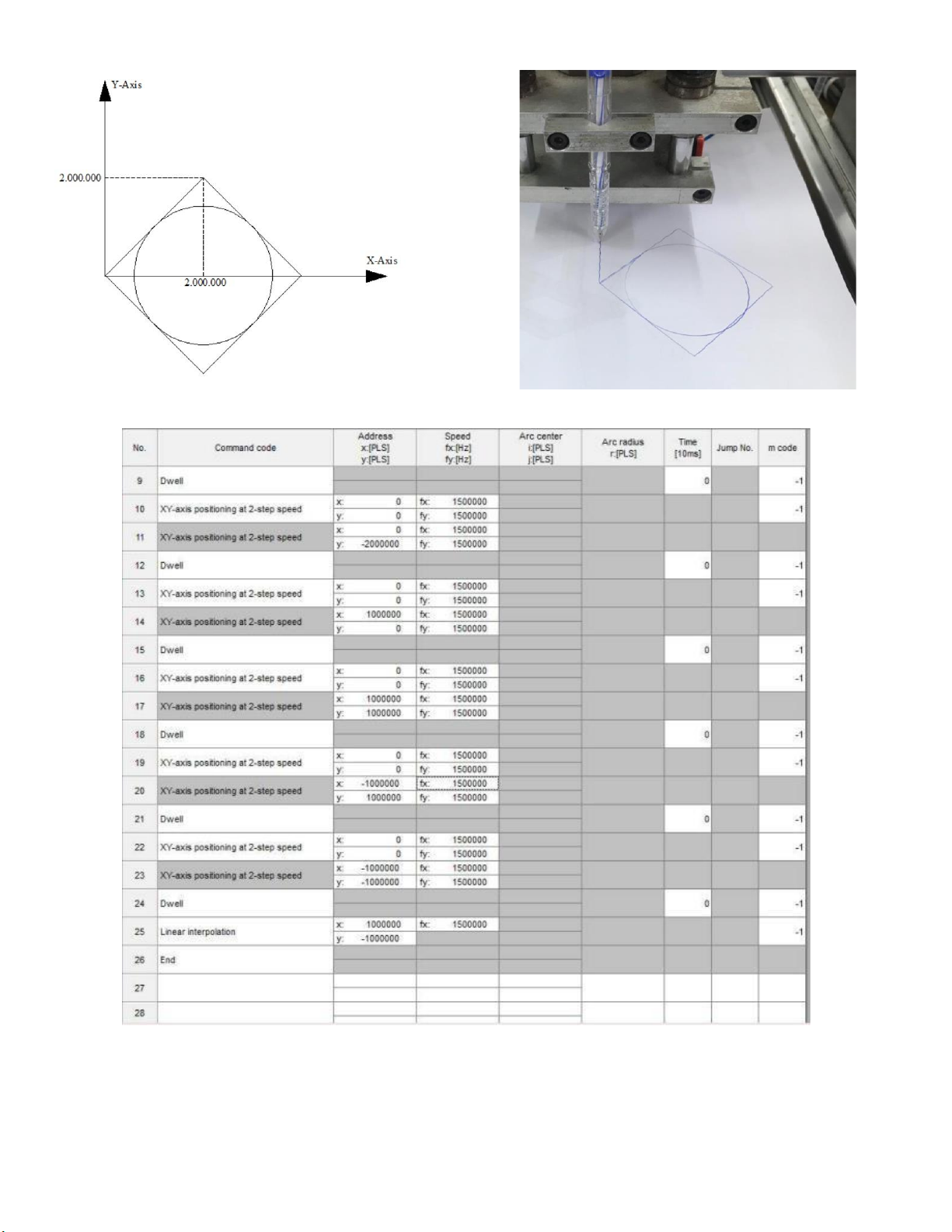
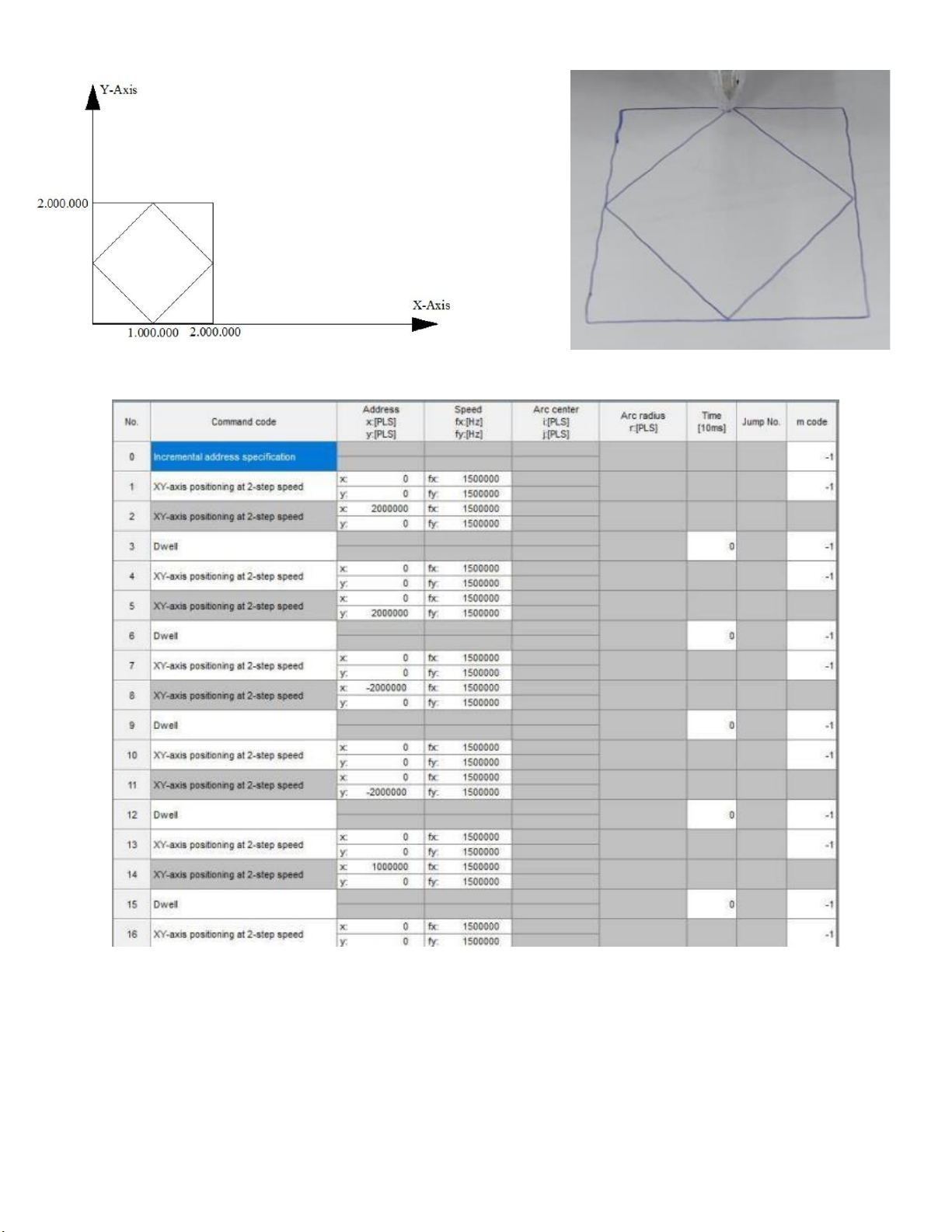
3.3.2. Tiến hành thí nghiệm: +) Chương trình PLC: lOMoAR cPSD| 58702377 lOMoAR cPSD| 58702377 lOMoAR cPSD| 58702377 +) Bài tập thí nghiệm: a.
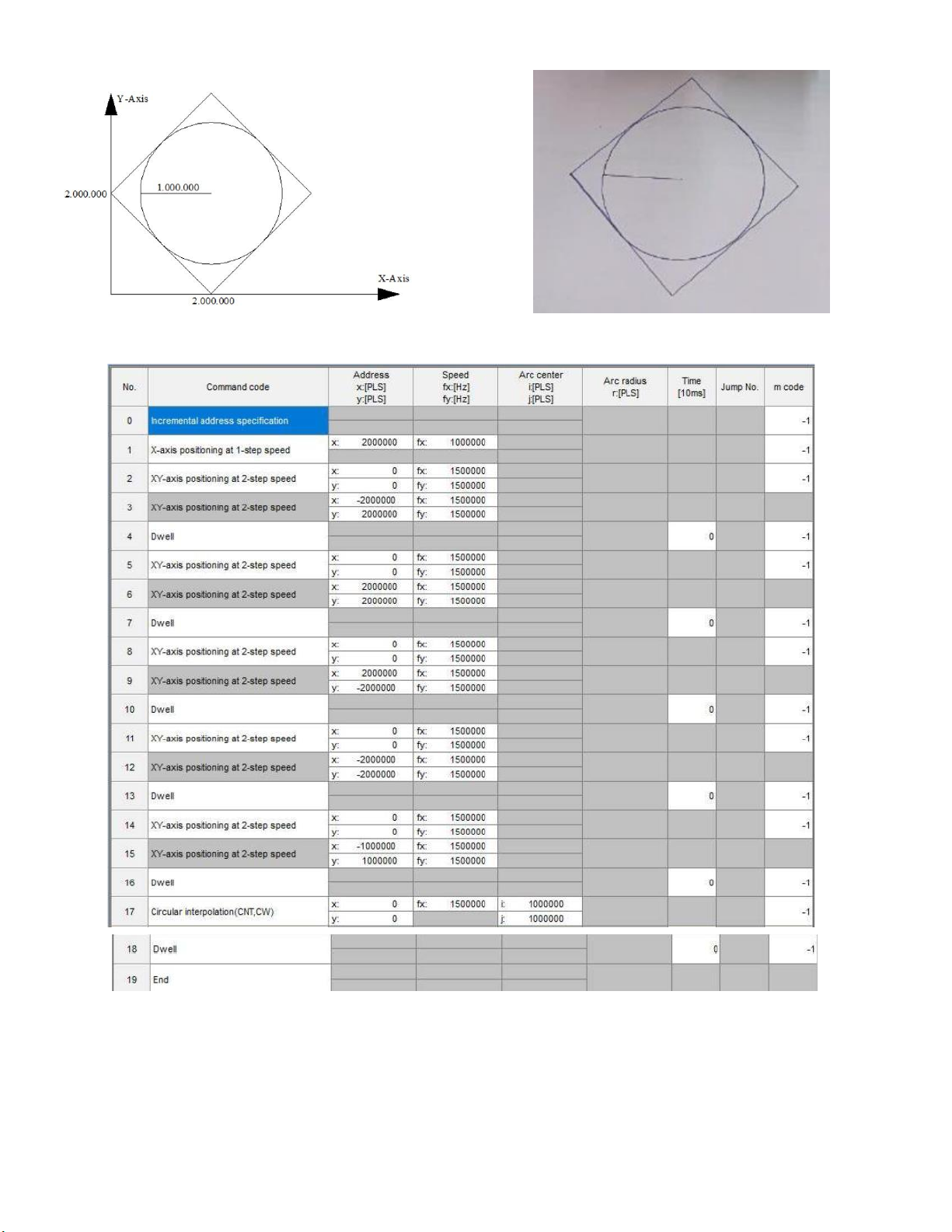
Hình mẫu Hình thực nghiệm b. lOMoAR cPSD| 58702377
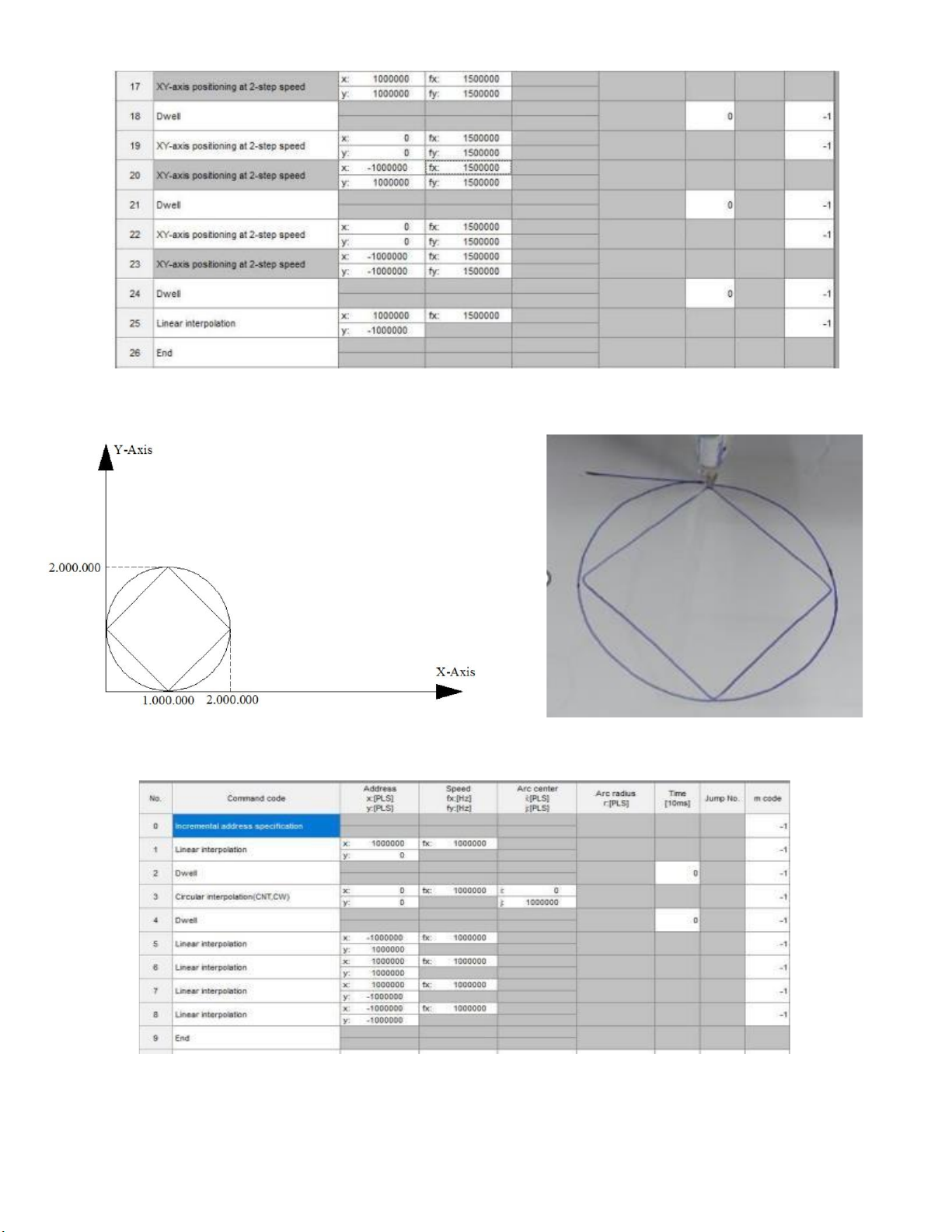
Hình mẫu Hình thực nghiệm c. lOMoAR cPSD| 58702377
Hình mẫu Hình thực nghiệm d. lOMoAR cPSD| 58702377
Hình mẫu Hình thực nghiệm lOMoAR cPSD| 58702377 e.
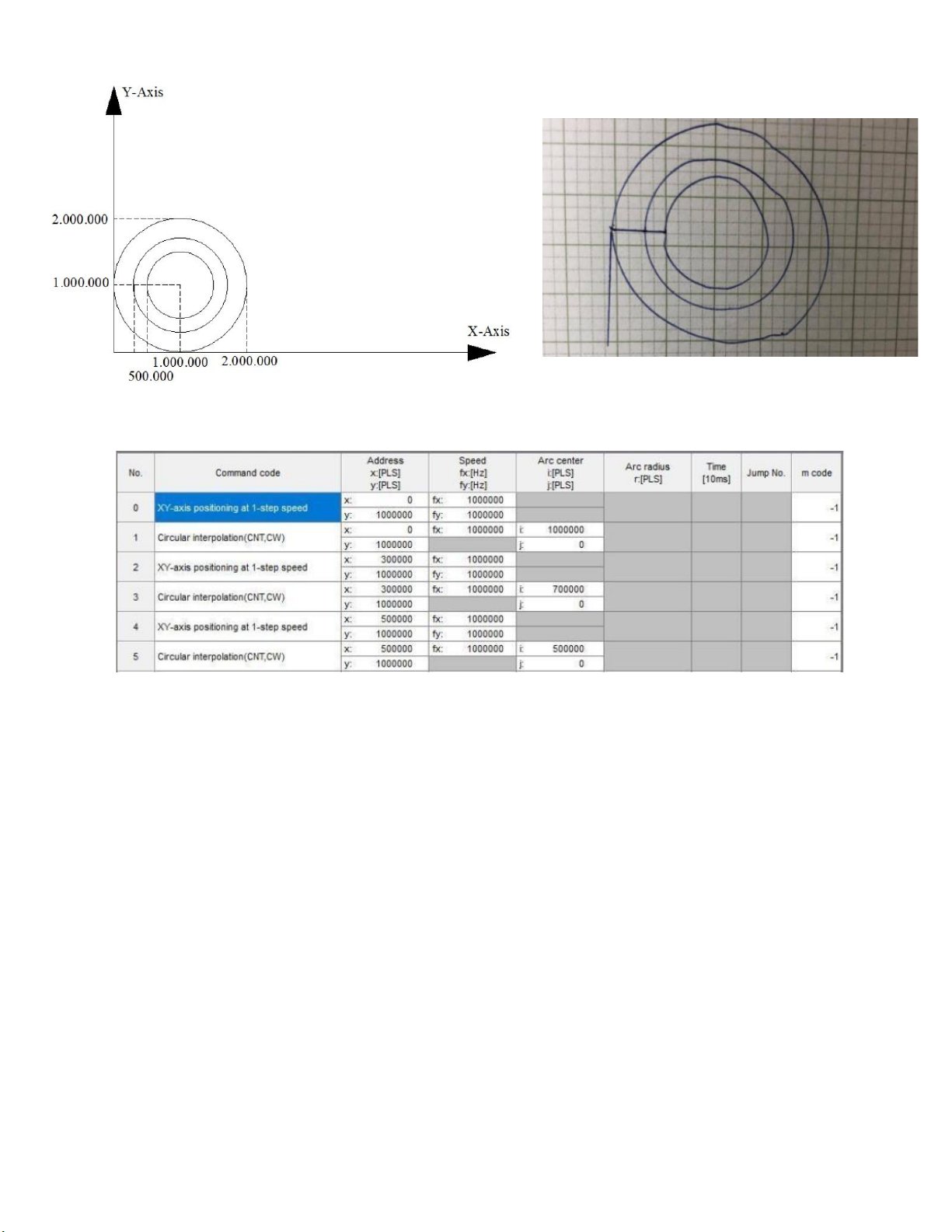
Hình mẫu Hình thực nghiệm f. lOMoAR cPSD| 58702377
Hình mẫu Hình thực nghiệm +) Nhận xét:
Sai số và độ lệch của hình vẽ chủ yếu do việc gá bút và cố định mặt
phẳng giấy không chắc chắn. Ngoài ra, nếu đầu bút tiếp xúc với mặt
phẳng quá lớn, hình vẽ sẽ bị ảnh hưởng, làm giảm độ chính xác và tính
thẩm mỹ. Không nên để ít giấy dễ dẫn đến rách giấy và khiến hình vẽ không hoàn thiện.
Chất lượng hình vẽ cũng bị ảnh hưởng khi vận tốc không phù hợp; khi
tăng vận tốc, đường nét có thể trở nên mượt mà hơn. Tuy nhiên, máy
thường xuyên gặp lỗi ở trục X, khiến hình vẽ không hoàn thiện. Sau mỗi
lần chạy, cần phải reset để khắc phục lỗi.
Bài 4: HỆ THỐNG SERVO THỦY LỰC
4.1. Cơ sở lý thuyết:
• Giới thiệu hệ thống servo thuỷ lực.
• Analog modules: FX2N-2AD, FX2N-4DA.
• Bộ điều khiển PID của PLC FX3U. lOMoAR cPSD| 58702377
4.2. Giới thiệu về mô hình servo thủy lực:
4.2.1. Tổng quát về mô hình:
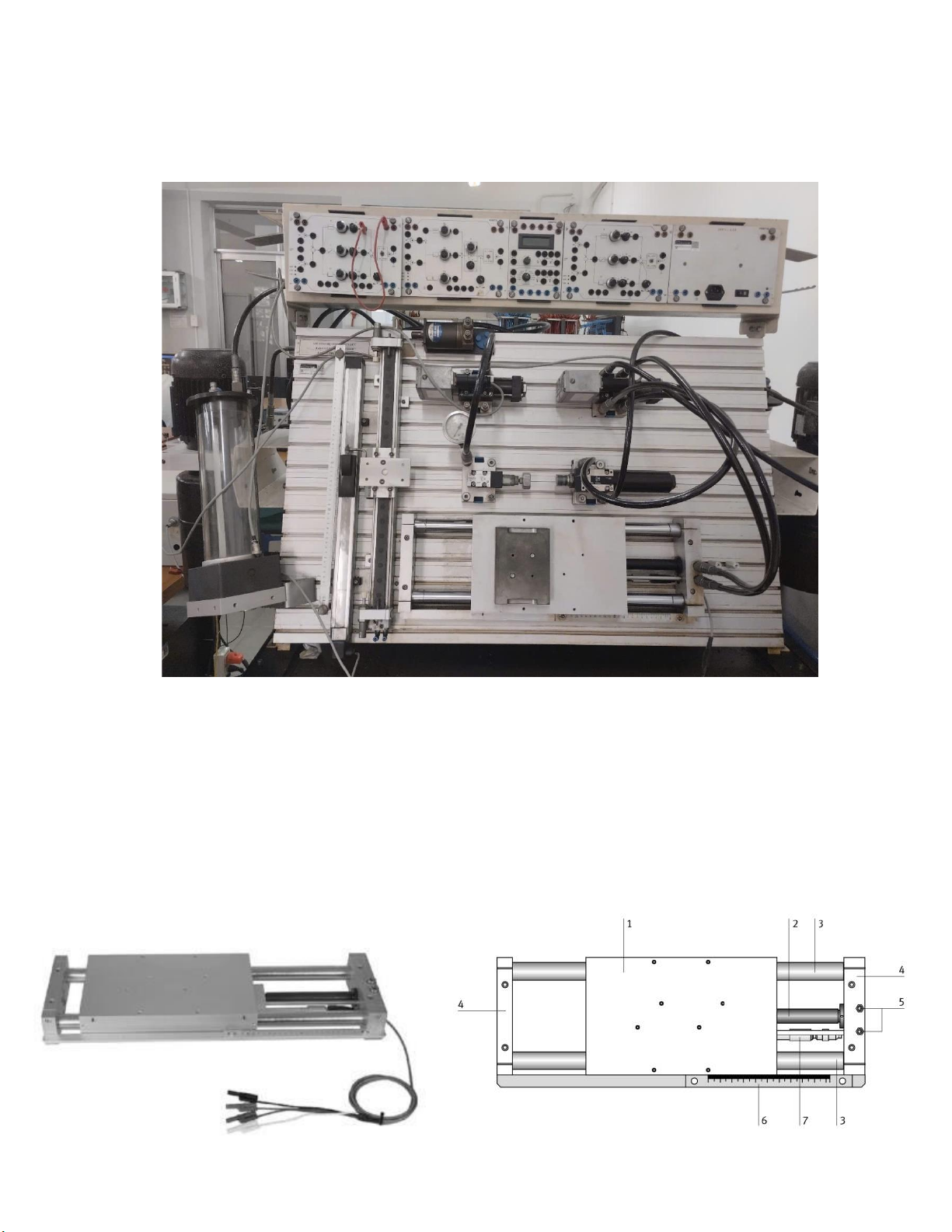
Hình 4.1: Mô hình thực tế hệ thống servo thuỷ lực.
4.2.2. Cấu tạo và chức năng của mô-đun truyền động tuyến tính: lOMoAR cPSD| 58702377
Hình 4.2: Module điều khiển thủy lực khí nén. • Cấu tạo: 1: bàn trượt
2: xy lanh tác động hai chiều 3: hai thanh dẫn hướng 4: hai mặt bích
5: hai khớp nối để kết nối ống thủy lực 6: thước tỉ lệ
7: cảm biến hành trình chiết áp • Chức năng:
Các buồng xy lanh được cung cấp áp suất dầu thông qua các khớp nối nhanh
giữa ống dẫn dầu và đầu nối (5). Áp suất trong bồn chứa tác động vào bề
mặt làm việc của piston sinh ra một lực tác động lên bàn trượt. Tốc độ trượt
của bàn trượt được xác định dựa vào lưu lượng dầu qua xy lanh. Bàn trượt
lắp với các thanh đỡ thông qua ổ bi đỡ nên ma sát rất bé. Cảm biến hành
trình chiết áp được bố trí bên dưới mặt bàn trượt, ngay bên cạnh xy lanh
thủy lực do vậy nó được bảo vệ tốt hơn.
Thước tỉ lệ gắn trực tiếp lên tấm đế bên hông bàn trượt, cho phép người vận
hành có thể đọc trực tiếp trị số trên thước. Thước này có thể điều chỉnh di
trượt chút ít trên tấm đế.
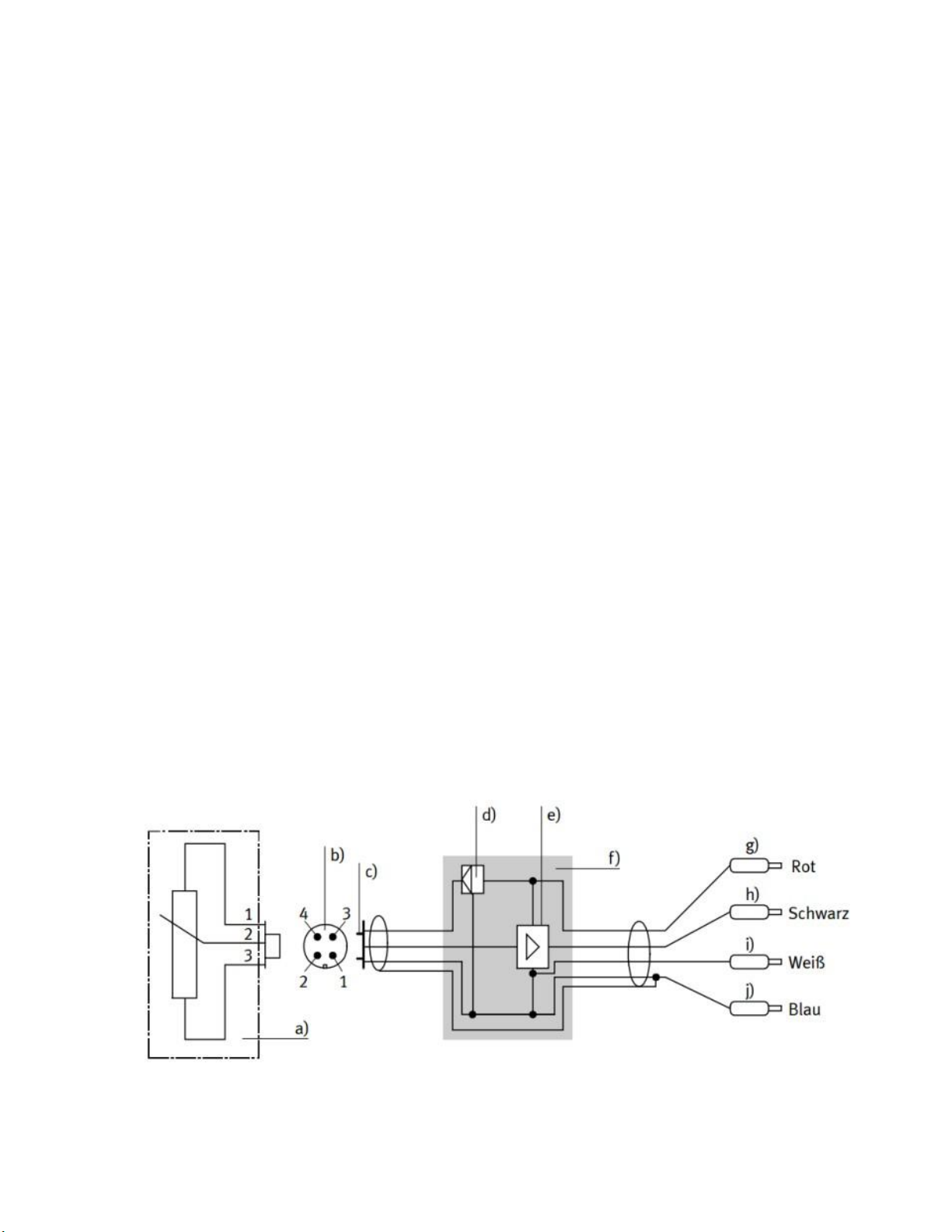
• Cấu tạo và kết nối của bộ mã hóa dịch chuyển:
Hình 4.3: Cảm biến hành trình a. Chiết áp f. Vỏ ngoài
Tài liệu liên quan:
-

Đồ án Môn Hệ thống truyền động | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
104 52 -

Đề thi cuối học kì 2 Môn Hệ thống truyền động | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
94 47 -

Đề thi cuối kì Môn Hệ thống truyền động | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
123 62 -

Thiết Kế Hệ Thống Truyền Động | Môn Hệ thống truyền động - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
125 63