LTDKTD 1: Câu Hỏi Ôn Thi Điều Khiển Tự Động Chương 1 & 2 | Đại học Điện lực
Đây là sơ đồ cấu trúc điều khiển theo nguyên tắc nào. LTDKTD 1: Câu Hỏi Ôn Thi Điều Khiển Tự Động Chương 1 & 2 | Đại học Điện lực. Tài liệu sưu tầm gồm 14 trang, giúp bạn tham khảo, ôn tập và đạt kết quả cao.
Môn: Lý thuyết điều khiển tự động ( DDL) 10 tài liệu
Trường: Trường Đại học Điện lực 502 tài liệu
Tác giả:

Preview text:
lOMoARcPSD| 59149108
Chương 1Tổng quan về điều khiển tự động
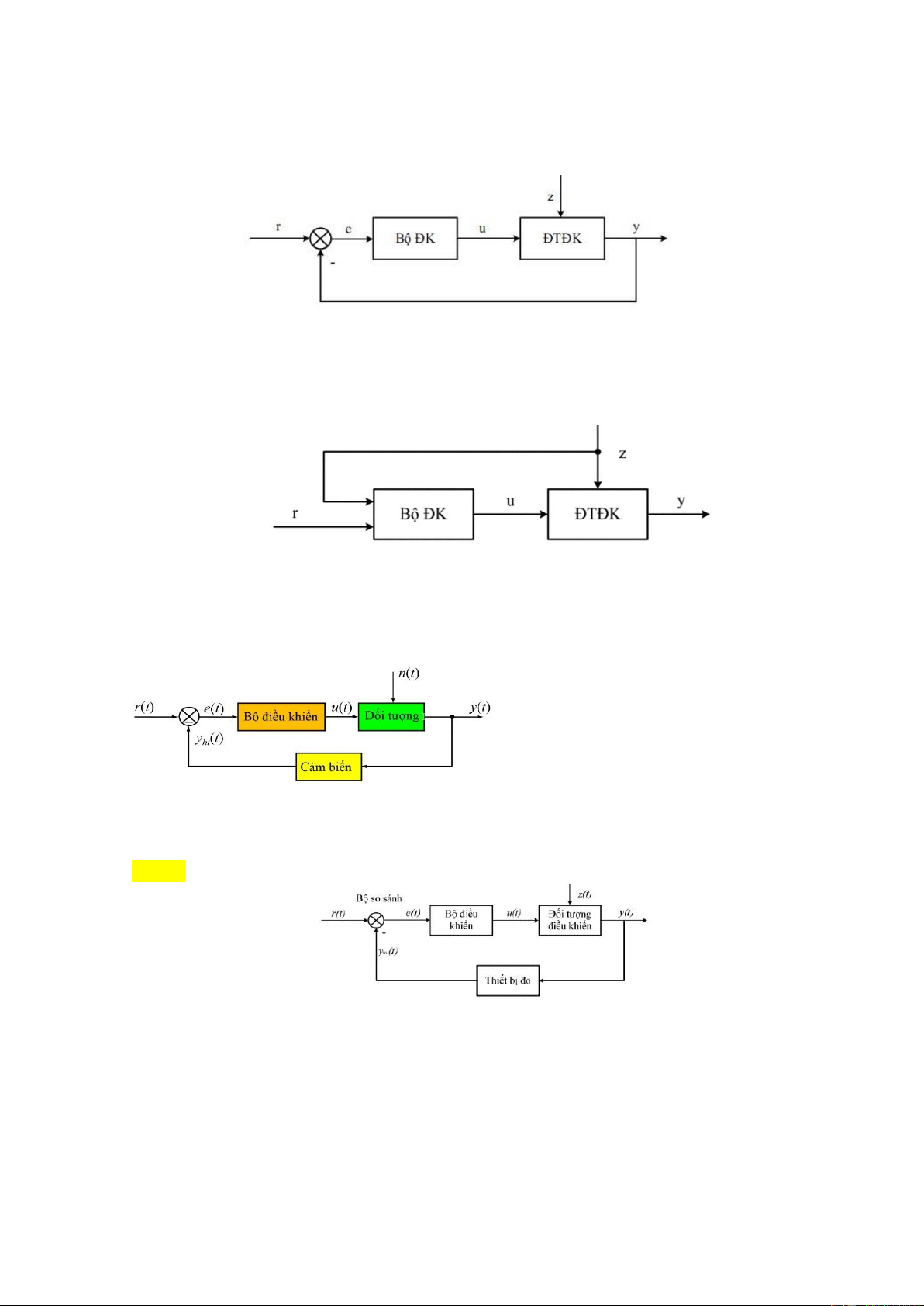
Câu 1: Đây là sơ đồ cấu trúc điều khiển theo nguyên tắc nào
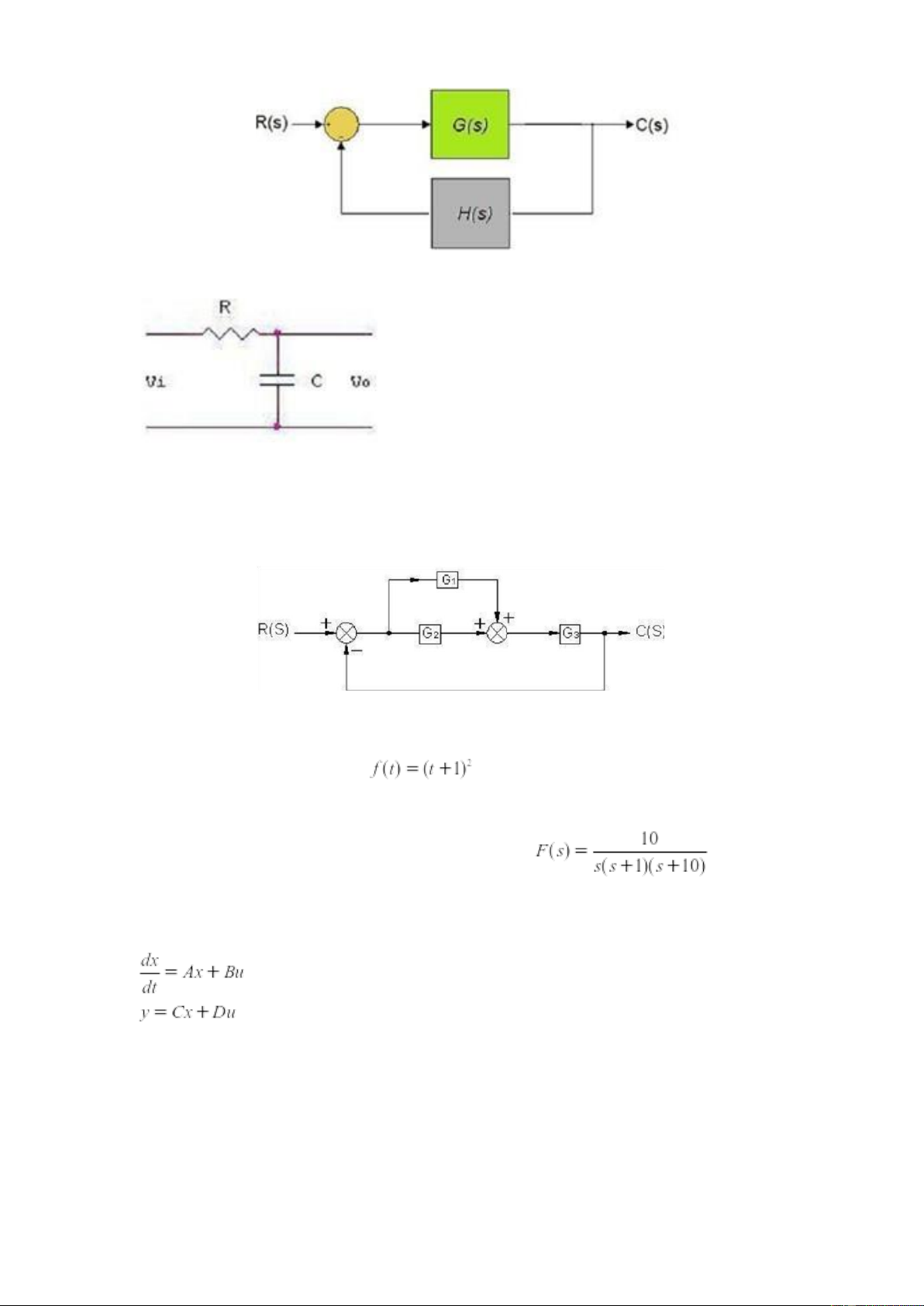
Câu 2: Sơ đồ cấu trúc điều khiển theo nguyên tắc nào?
For block diagram, choose the control method?
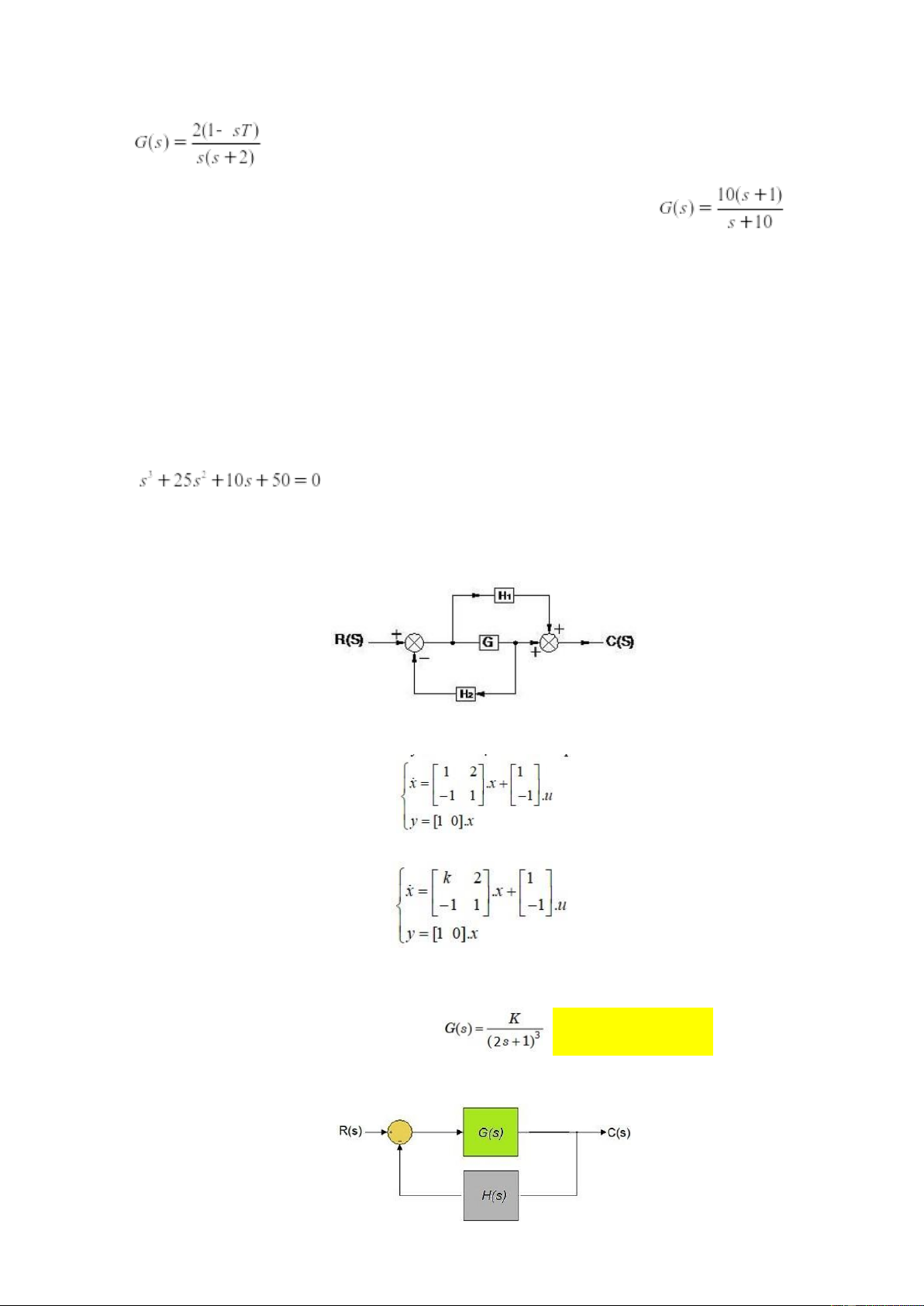
Câu 3: Đây là sơ đồ cấu trúc điều khiển theo nguyên tắc nào:
Câu 4: Cho sơ đồ khối như hình vẽ, hãy cho biết u(t) là tín hiệu gì?
Câu 5: Hàm truyền đạt của hệ thống biểu diễn ?
Câu 6: Đâu là hệ thống điều khiển phản hồi trạng thái?
Câu 7: Đâu là hệ thống điều khiển phản hồi tín hiệu ra? lOMoARcPSD| 59149108
Chương 2, Lý thuyết, bài tập
Câu 8: Hàm truyền vòng kín của hệ thống hồi tiếp âm là:
Câu 9: Sơ đồ khối hệ thống điều khiển vòng kín gồm có các phần tử cơ bản sau :
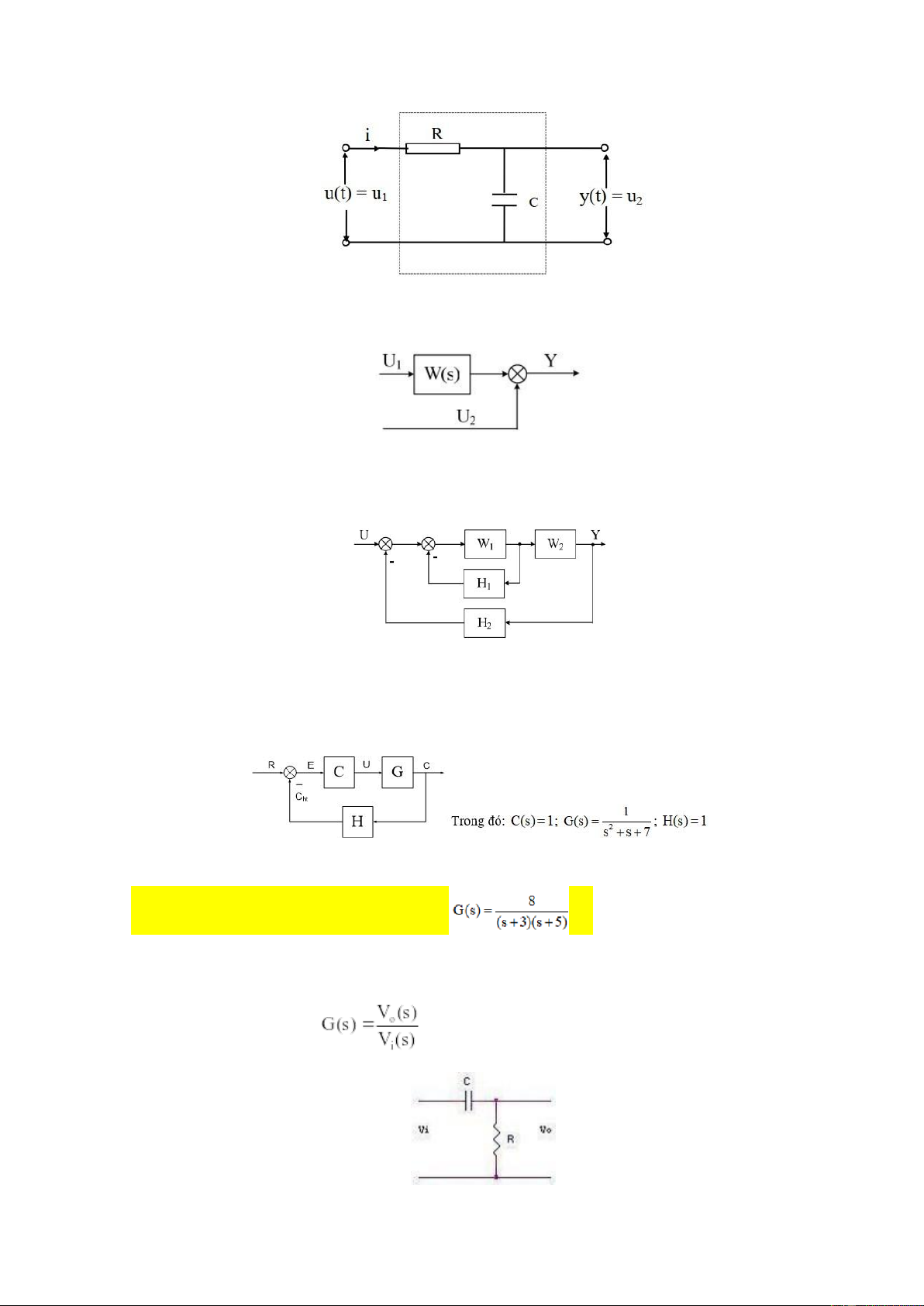
Câu 10 : Hàm truyền đạt
của mạch điện ở hình sau là:
Câu 11: Biến đổi Laplace của hàm f(t)= là?
Câu 12: Tìm hàm truyền hệ thống có cấu trúc sau: Trong đó: ; ;
Câu 13: Cho hàm truyền
tìm ma trận trong phương trình trạng thái.
Câu 14: Tìm hàm truyền vòng kín?
Looking for closed loop transmission? lOMoARcPSD| 59149108 hàm truyền đạt (Find the transfer circuit?)
Câu 15 : Tìm của mạch điện function of the Câu 16: Tìm hàm truyền của hệ thống? Find the system transfer function?
Câu 17: Ảnh Laplace của hàm là:
Câu 18: Hàm gốc thời gian f(t) của hàm ảnh Laplace là:
Câu 19: Một hệ thống tuyến tính có mô hình trạng thái:
Vậy hàm truyền đạt của hệ trên được xác định là:
Câu 20: Đặc tính biên tần logarit được xác định theo công thức nào sau đây với A(ω) là đặc tính biên tần?
Câu 21: Hàm quá độ h(t) mô tả sự thay đổi của tín hiệu ra khi tín hiệu vào là hàm? lOMoARcPSD| 59149108
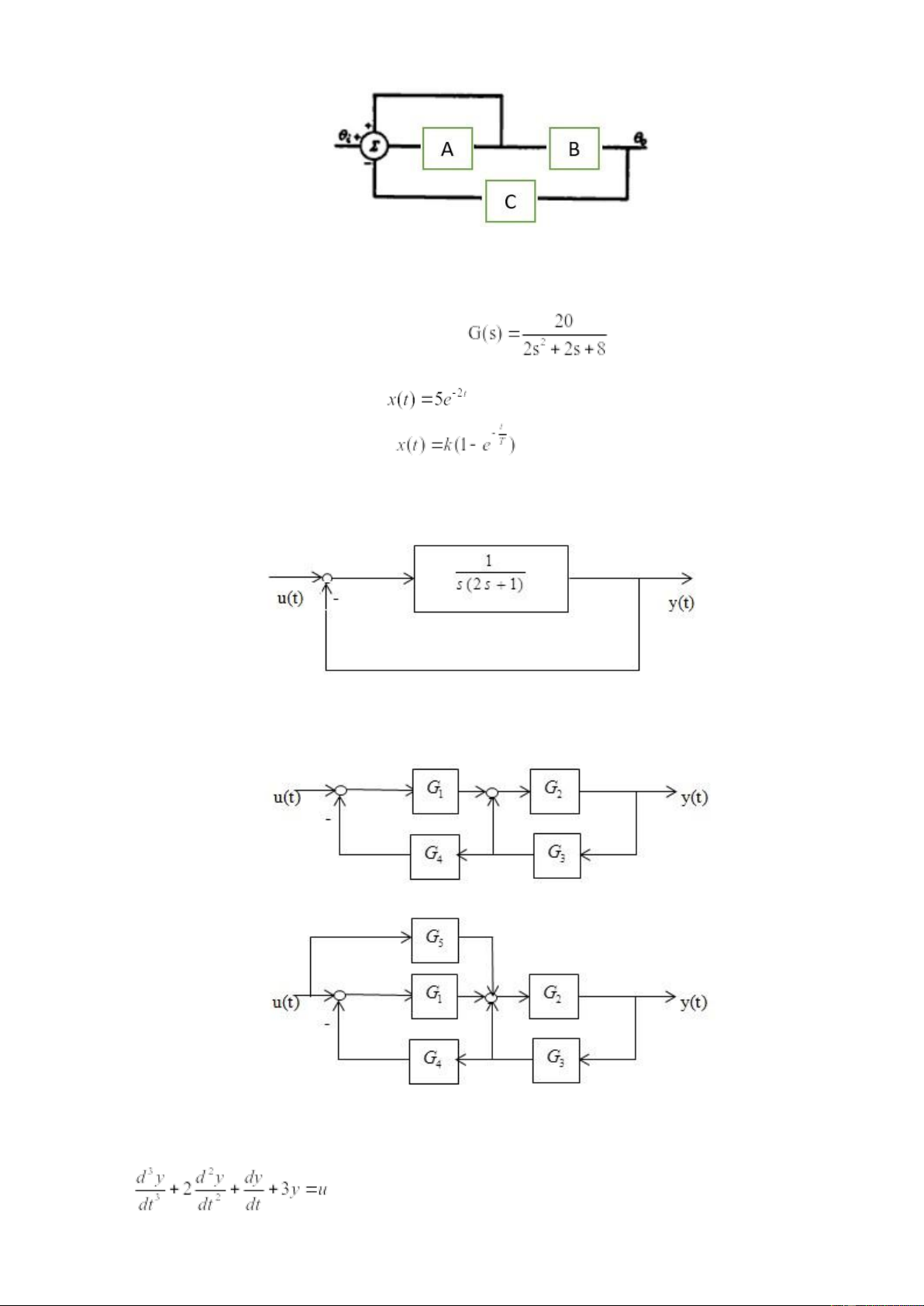
Câu 22: Hàm truyền đạt của mạch điện sau là
Câu 23: Chuyển tín hiệu từ sau lên trước khối điều khiển nào sau đây là đúng?
Câu 24: Hàm truyền đạt của hệ như hình vẽ là
Câu 25: Hàm truyền của hệ thống có sơ đồ điều khiển như sau
Câu 26: Cho hàm truyền,
Các ma trận của phương trình trạng thái là
của mạch điện ở hình sau là:
Câu 27: Hàm truyền đạt
Câu 28: Cho hệ thống có sơ đồ như hình vẽ. lOMoARcPSD| 59149108
Hàm truyền đạt của hệ thống là
Câu 29: Hệ thống điều khiển có hàm truyền ,
Các ma trận của hệ phương trình trạng thái là
Câu 30: Ảnh laplace của tín là: hiệu
Câu 31: Ảnh laplace của tín hiệu là:
Câu 32: Xác định hàm truyền hệ kín của hệ sau?
Câu 33: Xác định hàm truyền đạt của hệ có sơ đồ khối sau:
Câu 34: Xác định hàm truyền đạt của hệ có sơ đồ khối sau:
Câu 35: Xây dựng mô hình trạng thái từ phương trình vi phân mô tả quan hệ vào ra sau:
; với u(t)- tín hiệu vào; y(t)- là tín hiệu ra lOMoARcPSD| 59149108
Chương 3 Lý thuyết điều khiển tự động 1
Câu 36: Cho hệ thống được mô tả bởi hàm truyền đạt:
Với tín hiệu ngõ vào r(t) = δ(t), ngõ ra của hệ thống Y(s) là
Câu 37: Biểu đồ Bode là hình vẽ gồm các thành phần:
Câu 38: Cho hệ thống có hàm truyền
. Hãy cho biết hệ có nhưng khâu động học nào?
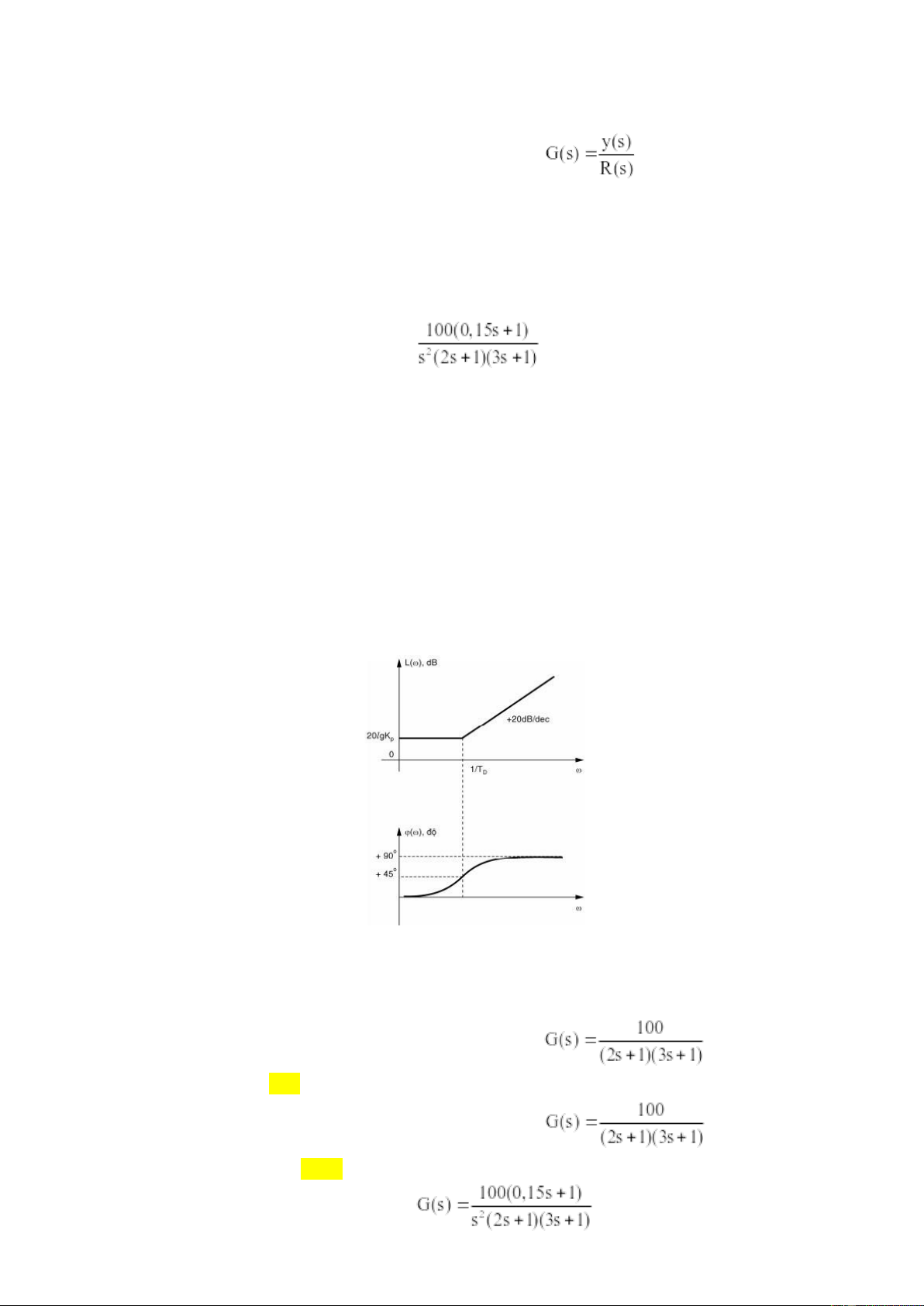
Câu 39: Đây là đồ thị của khâu động học nào
Câu 40: Cho hệ thống được mô tả bởi hàm truyền đạt: Với
tín hiệu vào r(t) = 1(t), tín hiệu ra của hệ thống Y(s) là
Câu 41: Cho hệ thống được mô tả bởi hàm truyền đạt:
Với tín hiệu vào r(t) = t.1(t), tín hiệu ra của hệ thống Y(s) là
Câu 42: Cho hệ thống có hàm truyền
. Hãy sắp xếp các khâu động
học theo thứ tự ɷg từ nhỏ tới lớn. lOMoARcPSD| 59149108
Câu 43: Cho hệ thống có hàm truyền . Hãy tìm 20lgK.
Câu 44: Nếu đáp ứng xung (hàm trọng lượng) của một hệ thống tuyến tính liên tục là hàm 1(t) thì hàm
truyền của hệ thống đó là: dy
Câu 45: Cho hệ thống được mô tả bởi phương trình vi phân:
+2 y=4u(t). Hàm quá
độ dt của hệ là:
Câu 46: Cho hệ thống có hàm truyền đạt
. Thời gian t để để y(t) đạt được
98% giá trị xác lập là:
Câu 47: Biên độ của hệ thống có hàm truyền đạt tại tần số ꞷ ꝏ = là:
Câu 48: Góc pha của hệ thống có hàm truyền đạt tại tần số =0 là:ꞷ
Câu 49: Hệ thống có hàm truyền
đạt có giá trị góc pha tại tần số =0 là:ꞷ
Câu 50: Hệ thống có hàm truyền đạt có giá trị biên tần logarith L(ꞷ ) tại tần số ꞷ =0 là:
Câu 51: Trong khâu tích phân, đặc tính pha tần số có giá trị bằng bao nhiêu:
Câu 52: Hệ thống điều khiển có hàm truyền đạt có các tần số gãy là:
Câu 53: Cho hệ thống có hàm truyền H (s)= s+1 hàm quá độ là s(s+5)
Câu 54: Cho hệ thống có hàm truyền H (s)= s+1 hàm quá độ là s(s+5)
Câu 55: Xét tính ổn định của hệ thống có hàm truyền
Câu 56: Khâu tích phân có hàm truyền G(s) =5/s
Kết luận tần biên/tần pha nào sau đây là đúng?
Câu 57: Khâu tích phân có hàm truyền G(s) =1/s lOMoARcPSD| 59149108
Kết luận Bode biên/Bode pha nào sau đây là đúng?
Câu 58: Cho hệ thống có hàm đáp ứng quá độ là
Hàm truyền đạt của hệ thống là.
Câu 59: Cho khâu vi phân bậc nhất có phương trình.
Hàm trọng lượng và hàm quá độ của khâu vi phân là
Câu 60: Xác định hàm trọng lượng g(t) của hệ có hàm truyền
Câu 61: Xác định hàm quá độ h(t) của hệ có hàm truyền
Câu 62: Đồ thị hàm quá độ h(t) của hệ có hàm truyền đạt nào sau đây KHÔNG CÓ dao động
Câu 63: Xác định hàm quá độ h(t) của hệ có hàm truyền
Chương 4 Lý thuyết điều khiển tự động 1,
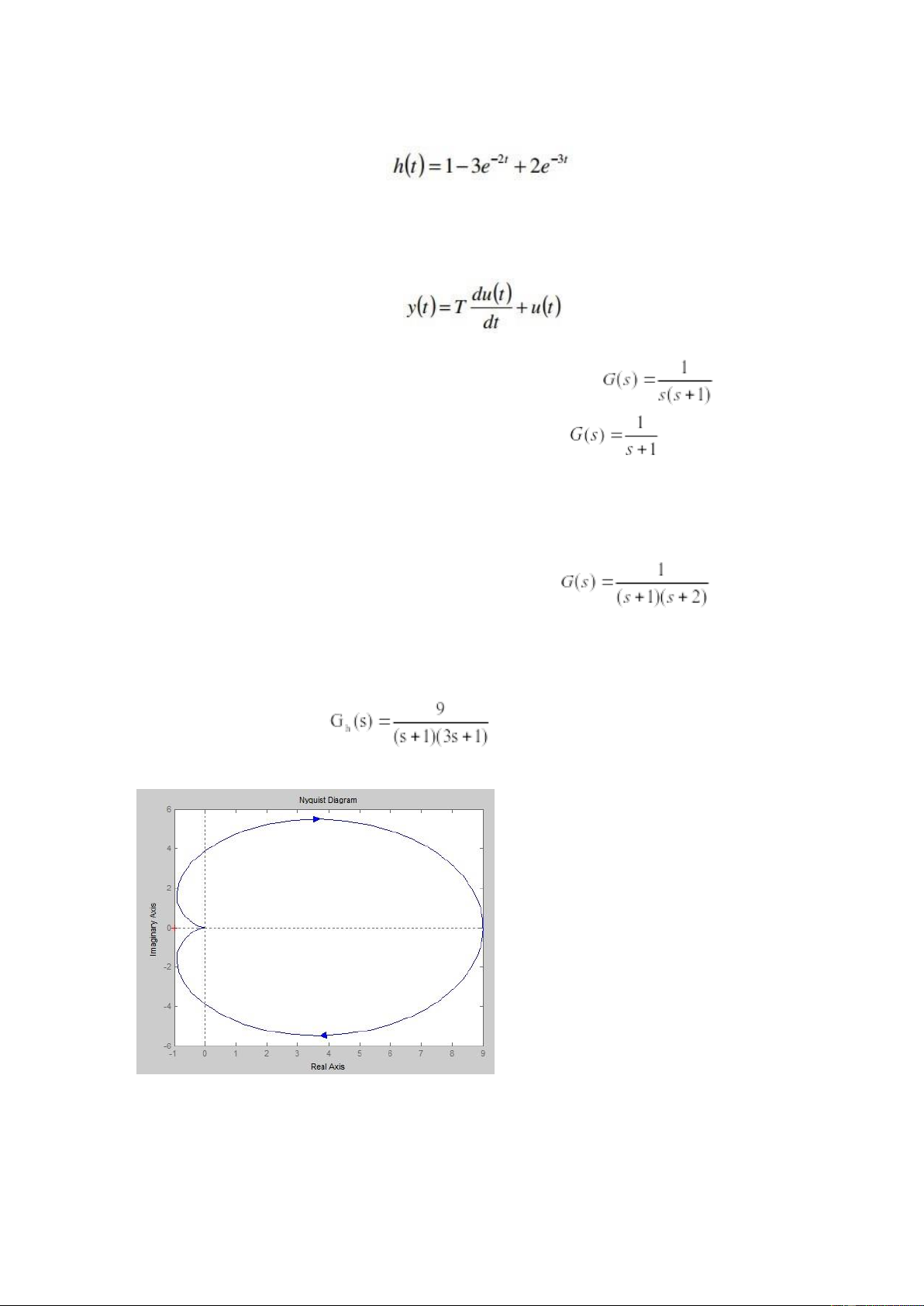
Câu 64: Cho hệ thống hở
có đặc tính tần số nyquist như hình vẽ . Xét
tính ổn định của hệ thống kín: lOMoARcPSD| 59149108
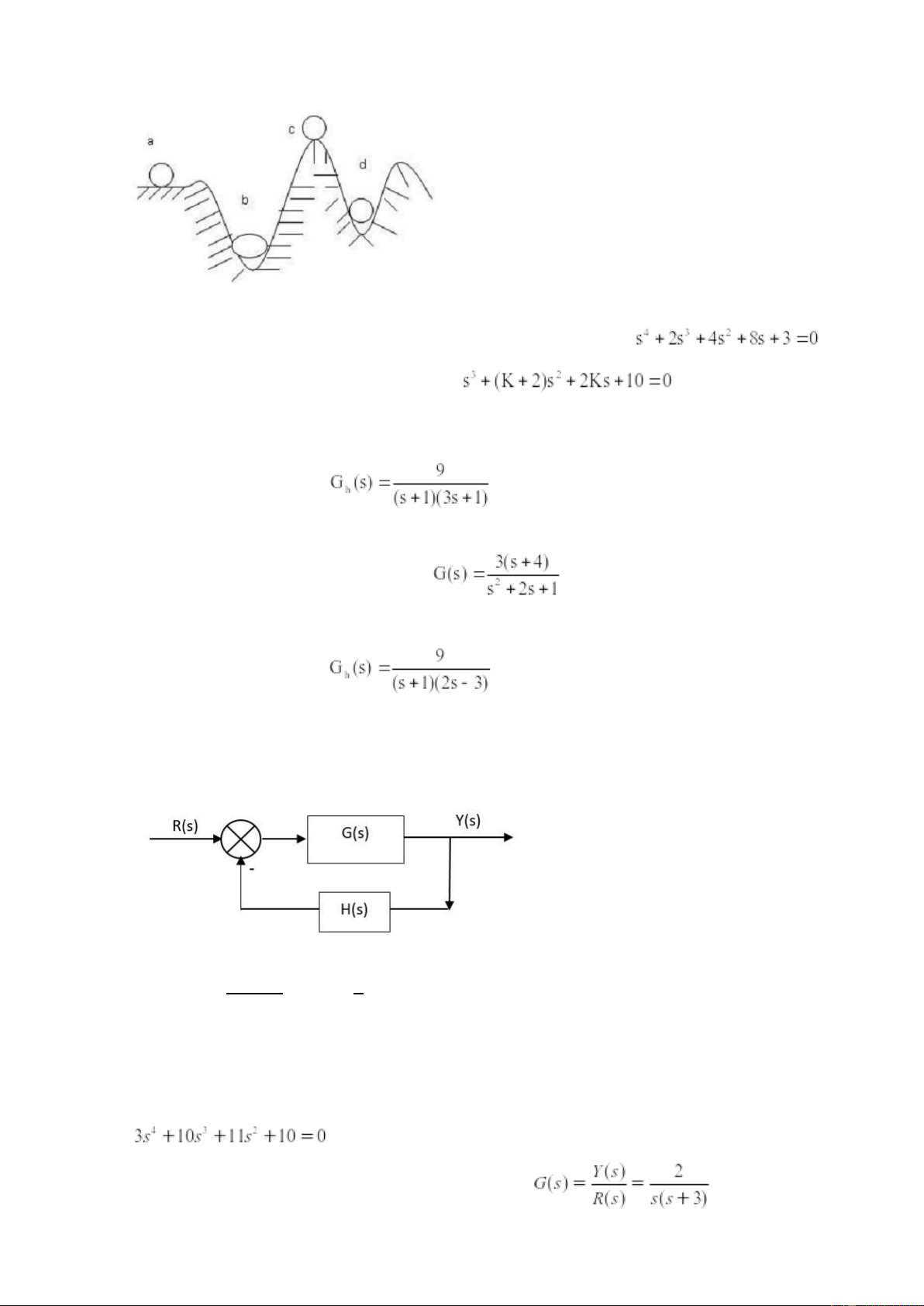
Câu 65: Cho biết có mấy vị trí cân bằng ổn định trong hình sau:
Câu 66: Điều kiện cần để hệ thống liên tục ổn định theo tiêu chuẩn ổn định đại số là:
Câu 67: Xét tính ổn định của hệ thống có phương trình đặc trưng :
Câu 68: Cho hệ có phương trình đặc trưng . Hãy xác định K để hệ thống ổn định:
Câu 69: Cho hệ thống hở
. Dựa và điều kiện cần và đủ xét tính ổn định
của hệ thống kín phản hồi đơn vị.
Câu 70: Hệ thống có hàm truyền hở:
, Xét tính ổn định của hệ thống kín
phản hồi đơn vị theo tiêu chuẩn ổn định Routh
Câu 71: Cho hệ thống hở
Xét tính ổn định của hệ thống kín phản hồi
đơn vị theo tiêu chuẩn ổn định Hurwitz.
Câu 72: Cho hệ thống điều khiển phản hồi âm có sơ đồ khối như hình vẽ dưới đây: 1 H (s)= K Với G (s )= và s+1 s(s+2)
Hệ thống kín sẽ ổn định với giá trị nào của K sau đây:
Câu 73: Cho một hệ thống điều khiển tự động có phương trình đặc tính là:
. Nhận xét gì về tính ổn định của hệ thống kín?
Câu 74: Cho một hệ thống điều khiển có hàm truyền . Nếu tín hiệu
vào r(t) = 1(t) thì đáp ứng đầu ra y(t) là: lOMoARcPSD| 59149108
Câu 75: Cho hệ thống kín phản hồi âm đơn vị trong đó hàm truyền của hệ hở là
. Xác định T để hệ ổn định?
Câu 76: Đặc tính tần biên pha (TBP) của hệ thống có hàm truyền đạt sẽ
nằm trong góc phần tư nào khi tần số biến thiên từ 0 đến +∞ :
Câu 77: Cho hệ thống điều khiển có đa thức đặc trưng là s3+5s2+6s+K+10, giá trị nào của K
sau đây thì hệ ổn định:
Câu 78: Cho hệ thống điều khiển có đa thức đặc trưng là s3+K s2+4s+6, giá trị nào của K sau
đây thì hệ ổn định:
Câu 79: Cho một hệ thống điều khiển tự động có phương trình đặc tính là:
. Số nghiệm của phương trình đặc tính nằm phía bên phải trục ảo của mặt phẳng phức là:
Câu 80: Phương trình đặc trưng của hệ thống có sơ đồ như hình vẽ là
Câu 81: Hệ thống tuyến tính được mô tả bởi phương trình trạng thái bậc 2. Phát biểu nào sau đay là đúng
Câu 82: Hệ thống tuyến tính được mô tả bởi phương trình trạng thái bậc 2
Với giá trị nào của k thì hệ thống điều khiển được hoàn toàn?
Câu 83: Cho hệ thống có hàm truyền đạt
điều kiện của hệ số K để hệ thống kín ổn định là
Câu 84: Cho hệ thống hồi tiếp âm đơn vị sau. Sai số xác lập exl là. lOMoARcPSD| 59149108 5 4 3 2
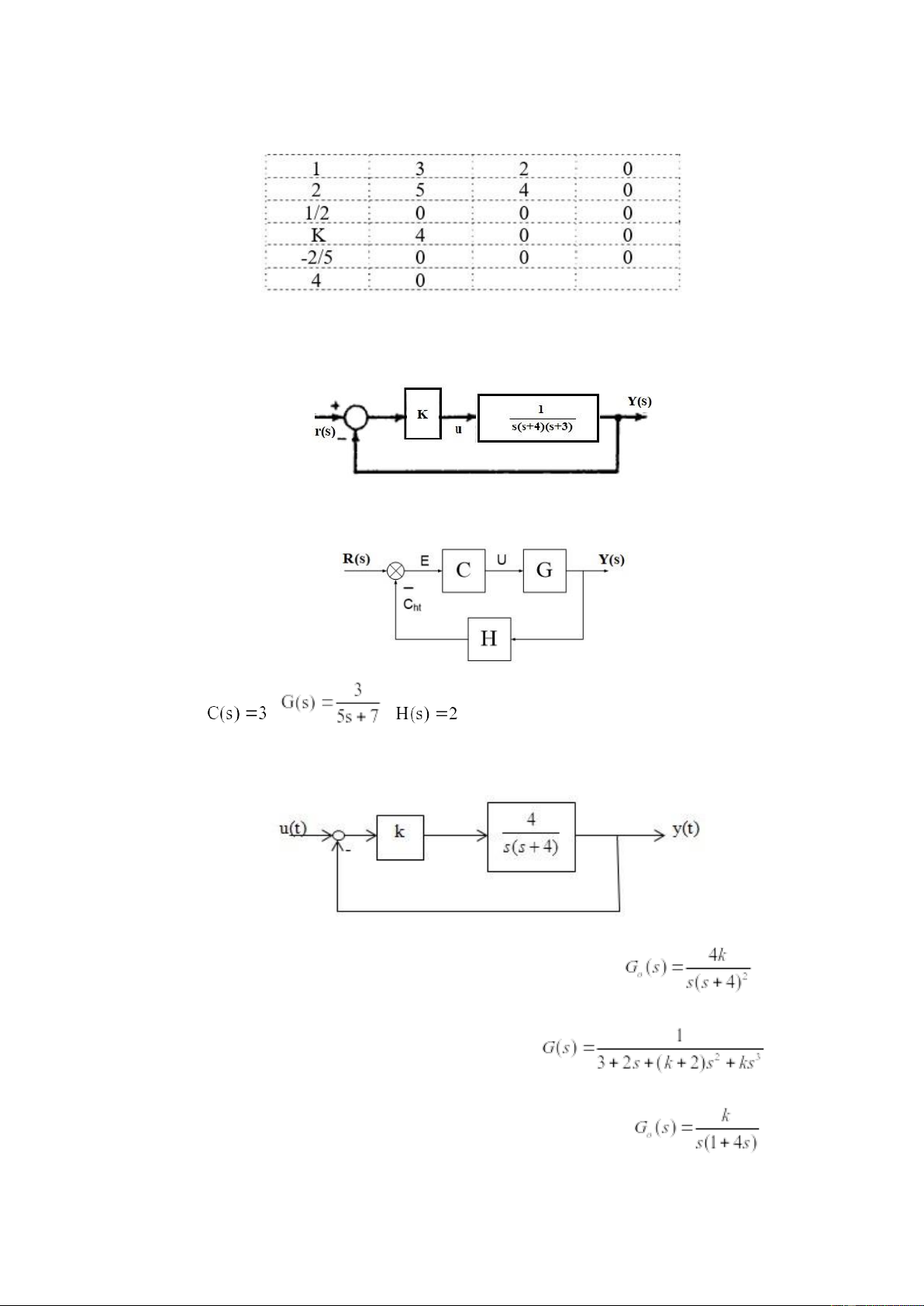
Câu 85: Cho hệ thống có phương trình đặc trưng: s + 2s + 3s + 5s + 2s + 4 = 0 .
Bảng Routh của hệ thống được cho như sau:
Giá trị K trong bảng Routh là?
Câu 86 Cho hệ thống có sơ đồ như hình vẽ
Với giá trị nào của K thì hệ ổn định
Câu 87: Cho hệ thống có sơ đồ điều khiển như hình vẽ trong đó: ; ;
Xét tính ổn định của hệ thống trên:
Câu 88: Tìm k để hệ kín sau ổn định?
Câu 89:Tím k để hệ kín phản hồi âm đơn vị có hàm truyền hệ hở ổn định ?
Câu 90: Tím điều kiện của k để hệ có hàm truyền đạt ổn định ?
Câu 91: Tím k để hệ kín phản hồi âm đơn vị có hàm truyền hệ hở ổn định ?
Câu 92: Tìm hệ ổn định? Biết đa thức đặc tính của chúng được cho như sau: lOMoARcPSD| 59149108
Chương 5 Lý thuyết điều khiển tự động 1,
Câu 93: Khâu hiệu chỉnh PID liên tục có dạng:
Câu 94: Khâu hiệu chỉnh PI (Proportional Integral ) có đặc điểm là:
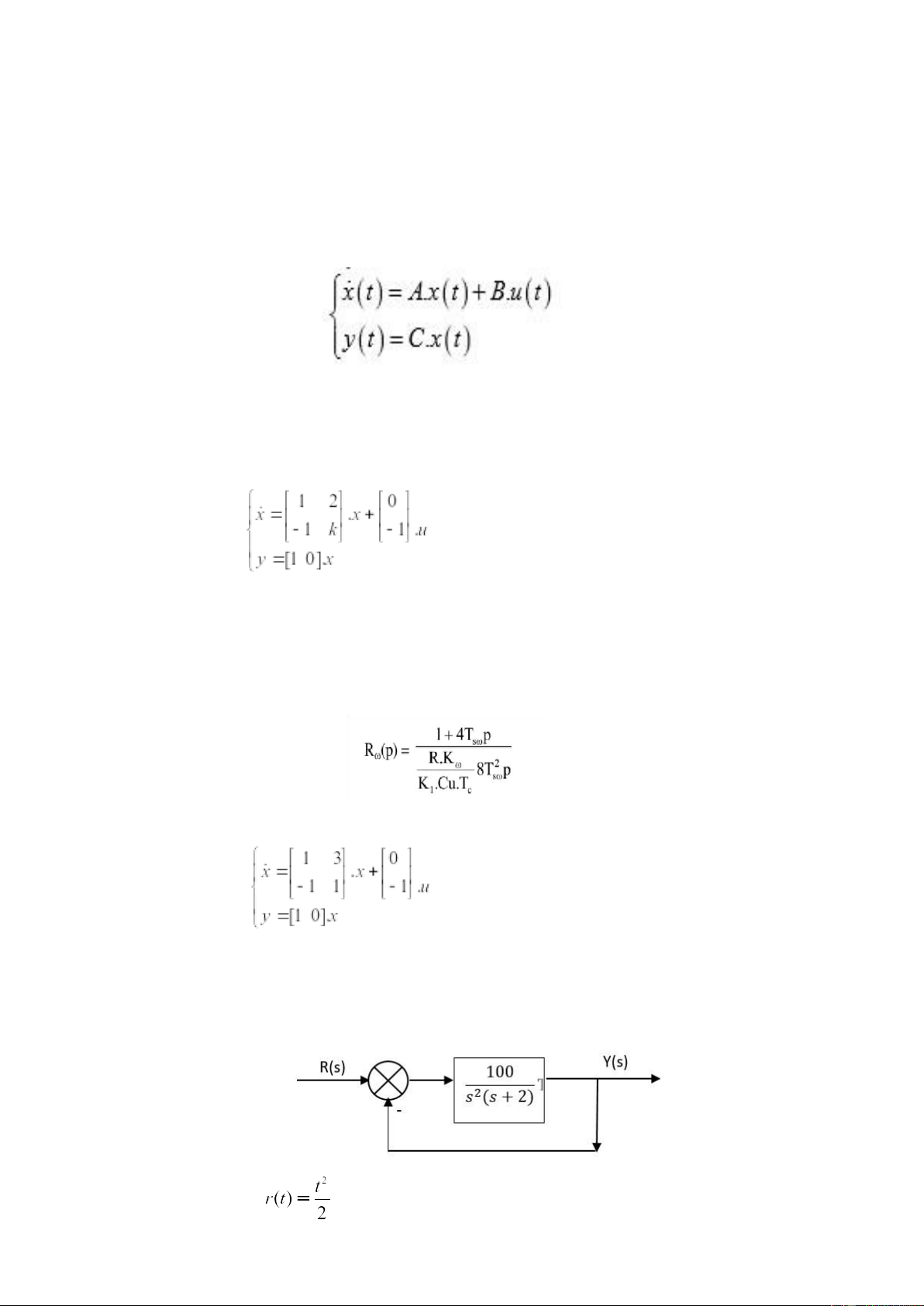
Câu 95: Hê tḥống tuyến tính được mô tả bởi hê phương tṛình trạng thái cấp n
Được gọi là điều khiển được hoàn toàn khi và chỉ khi ma trân P c ̣ ó hạng bằng n. Vây ma trậ
n ̣ P được xây dựng như thế nào?
Câu 96: Hệ thống tuyến tính được mô tả bởi phương trình trạng thái cấp 2:
Với giá trị nào của k thì hệ thống quan sát được hoàn toàn?
Câu 97: Cho hệ thống điều khiển có sơ đồ như hình vẽ, tín hiệu r(t) = 2t . Hãy tìm sai số xác lập của hệ:
Câu 98: Bộ điều khiển Rω(p) là bộ điều khiển loại gì?
Câu 99: Hệ thống tuyến tính được mô tả bởi phương trình trạng thái cấp 2:
Xét tính điều khiển được và quan sát được của hệ thống?
Câu 100: Một hệ thống điều khiển phản hồi âm đơn vị có sơ đồ khối như hình dưới đây. Với tín hiệu vào
thì sai số xác lập của hệ là:
Câu 101: Một hệ thống điều khiển phản hồi âm đơn vị có hàm truyền lOMoARcPSD| 59149108 . Với tín hiệu vào
thì sai số xác lập của hệ là:
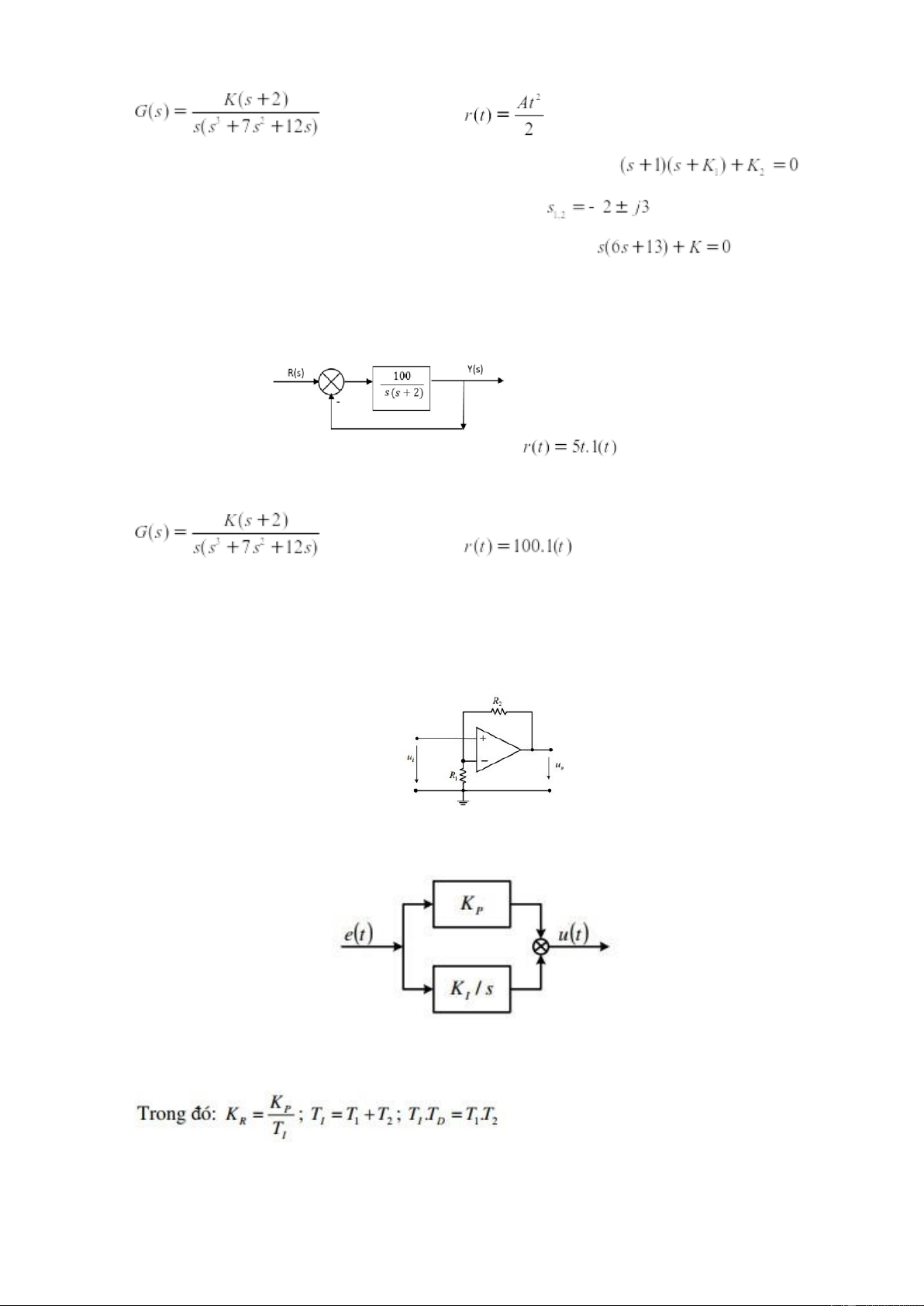
Câu 102: Một hệ thống điều khiển có phương trình đặc trưng là: .
Giá trị nào của K1 và K2 sau để hệ nhận cặp điểm phức làm nghiệm cực:
Câu 103: Một hệ thống điều khiển có phương trình đặc trưng . Giá trị nào
của K sau đây để hệ nhận cặp điểm phức trong đó có phần thực là -1 làm nghiệm cực:
Câu 104: Một hệ thống điều khiển phản hồi âm đơn vị có sơ đồ khối như hình dưới đây. Với tín hiệu vào
thì sai số xác lập của hệ là:
Câu 105: Một hệ thống điều khiển phản hồi âm đơn vị có hàm truyền của hệ hở là . Với tín hiệu vào
thì sai số xác lập của hệ là: Câu
106: Góc pha φ( ) của khâu hiệu chỉnh PD có giá trị thay đꞷ
ổi như thế nào khi tần
số ꞷ thay đổi từ 0 đến +ꝏ:
Câu 107: Cho sơ đồ của khâu điều khiển như hình vẽ Khi R1= 2, R2=1 thì Kp là
Câu 108: Cho sơ đồ của khâu điều khiển như hình vẽ,
Với Kp=1, Ki = 2, hàm quá độ là:
Câu 109: Đâu không phải là hàm truyền đạt của bộ PID?
Câu 110: Bộ bù trễ pha được sử dụng khi nào? Câu 111
Hàm truyền của hiệu chỉnh tích phân tỉ lệ PI (proportional integral) liên tục có dạng:
Câu 112 : Hàm quá độ của khâu PID là lOMoARcPSD| 59149108
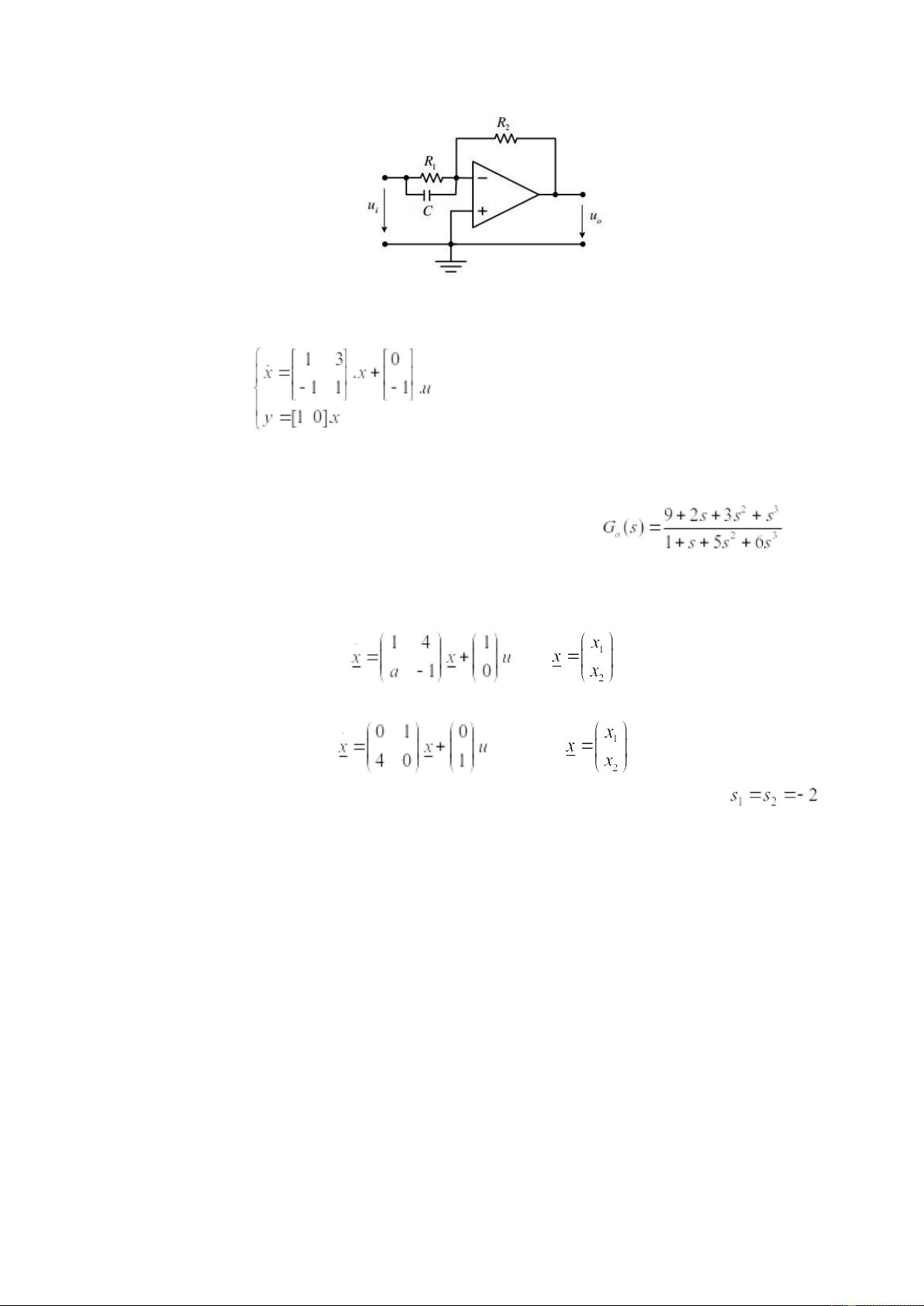
Câu 113: Cho bộ PD bằng khuếch đại thuật toán như hình vẽ
Hàm truyền đạt của bộ PD là
Câu 114: Hệ thống tuyến tính được mô tả bởi phương trình trạng thái cấp 2:
Xét tính điều khiển được và quan sát được của hệ thống?
Câu 115: Sai lệch tĩnh của hệ phụ thuộc những yếu tố nào?
Câu 116: Cho hệ kín phản hồi âm đơn vị có hàm truyền hệ hở
Xác định sai lệch tĩnh của hệ khi kích thích bởi tín hiệu 1(t) ở đầu vào?
Câu 117: Xác định tham số a để hệ sau điều khiển được với
Câu 118: Cho đối tượng có mô hình trạng thái trong đó
Thiết kế bộ điều khiển phản hồi trạng thái R sao cho hệ thống có 2 điểm cực tại



