Phân tích và Thiết kế Hệ thống Điều Khiển PID | Môn Phân tích thiết kế hệ thống - Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội
Mục tiêu đặt ra ở đây là thiết kế hệ thống điều khiển cho quá trình ổn định mức nước bao hơi của nhà máy nhiệt điện Uông Bí ở cả giai đoạn khởi động lò và giai đoạn hoạt động lâu dài. Tài liệu được sưu tầm gồm 12 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Phân tích thiết kế hệ thống (bk) 10 tài liệu
Trường: Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội 106 tài liệu
Tác giả:


Preview text:
lOMoAR cPSD| 58675420 Mục lục
1. Xây dựng sơ đồ khối cấu trúc điều khiển hệ thống: .................... 2
2. Xây dựng hàm truyền đạt của các thiết bị đo,thiết bị chấp
hành: ..................................................................................................... 3
2.1 Hàm truyền của thiết bị đo mức trong lò bao hơi: ................................. 3
2.2 Hàm truyền của thiết bị đo mức trong lò bao hơi: ................................ 4
2.3 Hàm truyền của van nước trong lò bao hơi: .......................................... 4
2.4 Hàm truyền của bộ chuyển đổi dòng điện khí nén ( I/P ): .................... 5
2.5 Hàm truyền của quá trình mức nước bao hơi; ..................................... 5
2.6 Thiết kế bộ điều khiển PID cho quá trình mức nước bao hơi: ............. 6
2.6.1 Giai đoạn khởi động lò: .................................................................... 6
a. Sử dụng simulink ................................................................................... 7
b. Sử dụng Command window .................................................................. 7
2.6.2 Giai đoạn vận hành lò lâu dài: ........................................................ 8
3. Tổng hợp mạch vòng điều khiển mức nước bao hơi: .................. 9
a. Sử dụng Simulink ................................................................................ 10
b. Sử dụng Command window ................................................................ 11 lOMoAR cPSD| 58675420
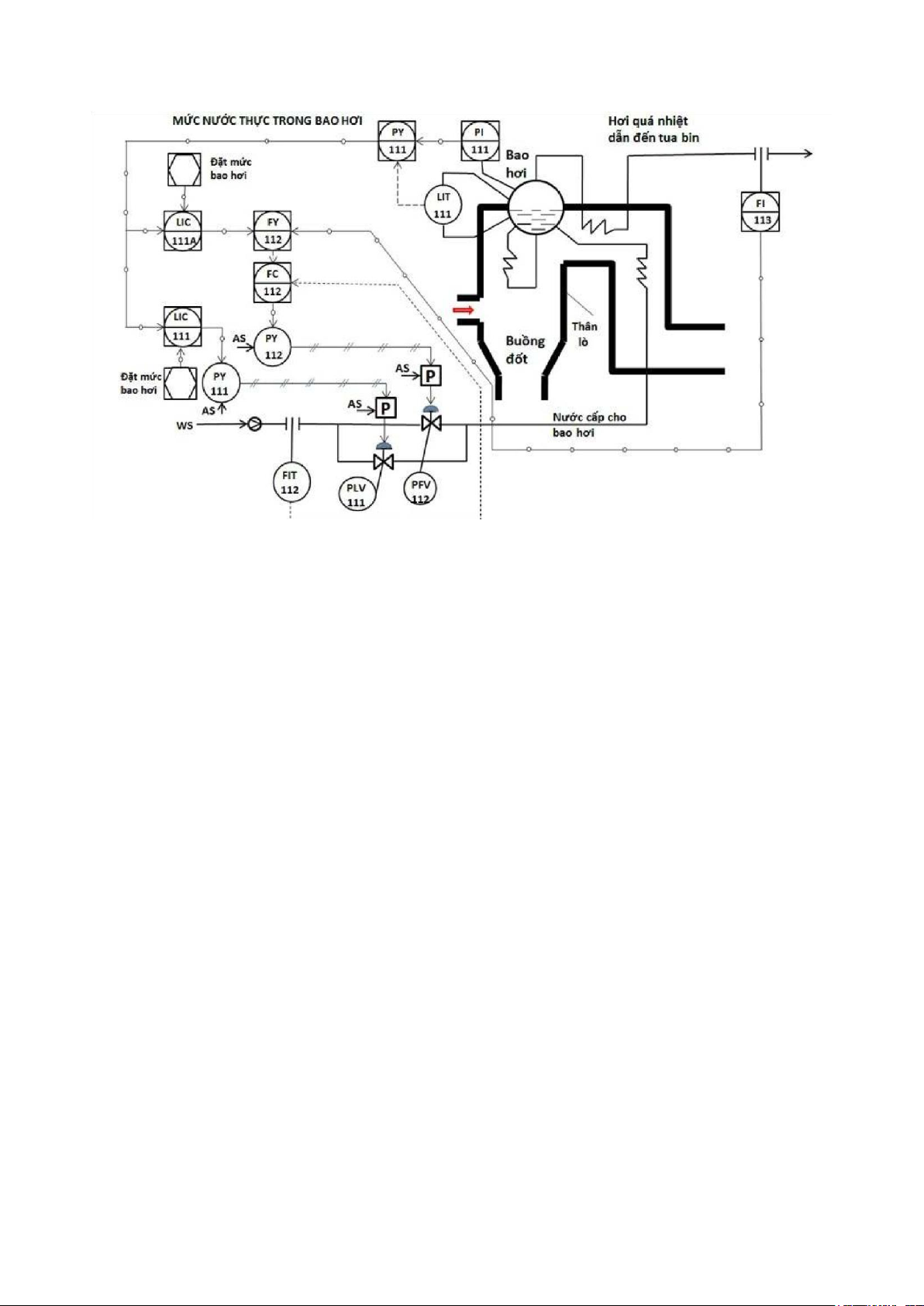
Lưu đồ PID điều khiển mức nước bao hơi lò
Mục tiêu: mục tiêu đặt ra ở đây là thiết kế hệ thống điều khiển cho quá trình ổn
định mức nước bao hơi của nhà máy nhiệt điện Uông Bí ở cả giai đoạn khởi động
lò và giai đoạn hoạt động lâu dài. Lò hơi có cấu tạo và thông số kỹ thuật như đã
cho ở trên. Trong quá trình vận hành lò, mức nước bao hơi cần duy trì xung quanh
mức đặt 700mm tính từ đáy bao hơi lên. Mức nước trong bao hơi phụ thuộc vào
nhiều yếu tố, như áp suất trong bao hơi, lưu lượng nước vào lò, lưu lượng hơi
sang tua bin ... Vì vậy yêu cầu của bộ điều chỉnh cấp nước khi làm việc trong dãi
điều chỉnh của phụ tải lò cần duy trì mức nước ở giới hạn sau: Ở chế độ vận hành
bình thường ổn định (có nghĩa là không có sự thay đổi đột ngột của phụ tải, của
nhiệt độ lò) lúc đó sai lệch mức nước lớn nhất cho phép không được quả + 20mm
so với mức nước “0”. Khi có sự thay đổi bước nhảy đột ngột của phụ tải từ
10+50% so với định mức thì sai lệch cho phép không được lớn hơn +50mm. Khi
ở chế độ làm việc ổn định thì số lần tác động của bộ điều chỉnh trong một phút
không qua 6 lần. Như vậy ta cho bộ điều chỉnh đảm bảo tác động khi có độ sai
lệch mức trong bao hơi là 420 mm
1. Xây dựng sơ đồ khối cấu trúc điều khiển hệ thống:
Giai đoạn bắt đầu khởi động lò tương ứng với vòng điều khiển (111) trên sơ đồ P&ID của hệ thống: lOMoAR cPSD| 58675420
Giai đoạn hoạt động lâu dài tương ứng với vòng điều khiển (112) trên sơ đồ P&ID của hệ thống:
2. Xây dựng hàm truyền đạt của các thiết bị đo,thiết bị chấp hành:
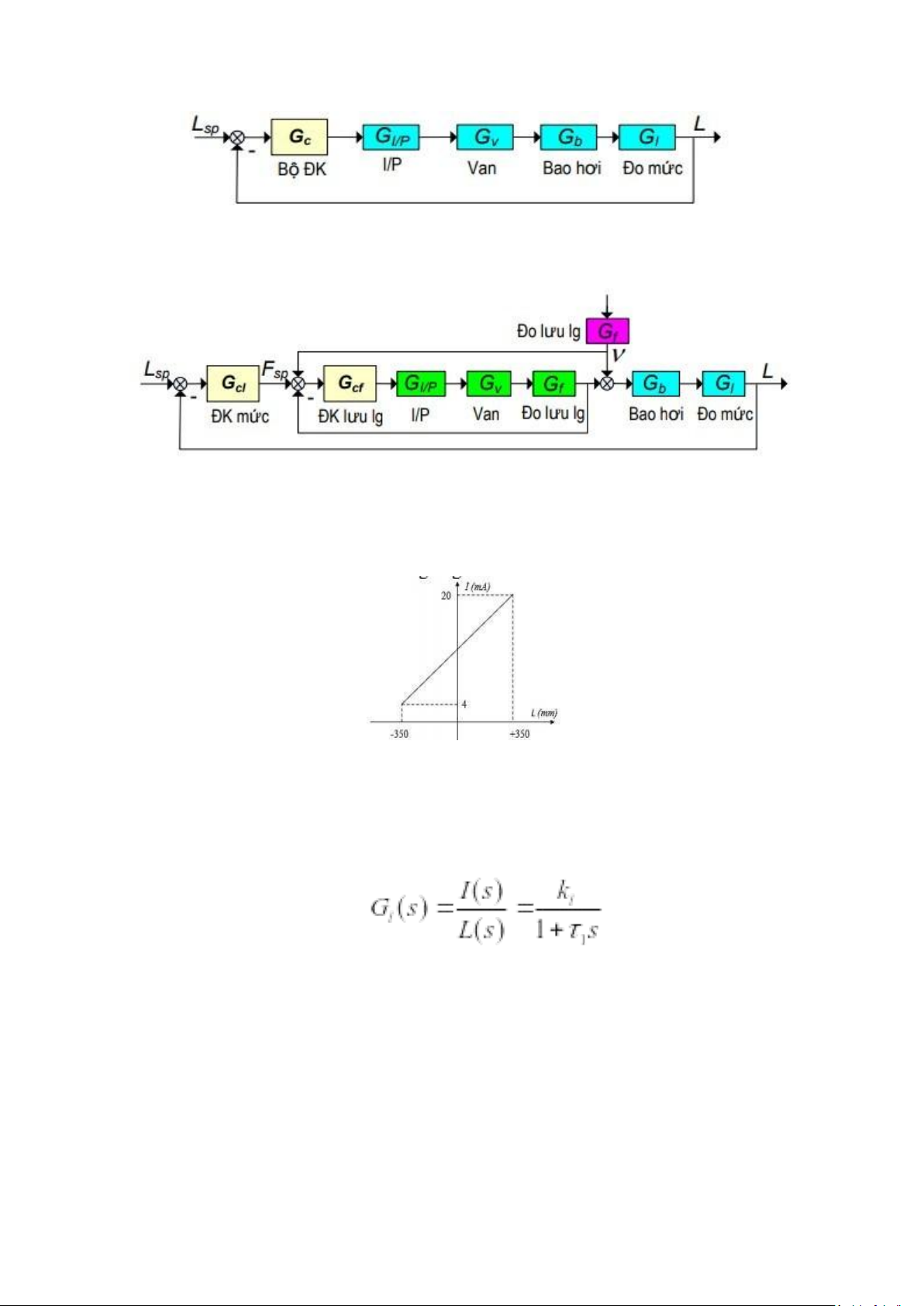
2.1 Hàm truyền của thiết bị đo mức trong lò bao hơi:
Đặc tính của thiết bị đo mức nước trong bao hơi
Hàm truyền của thiết bi đo mức nước trong bao hơi là khâu quán tính với đầu vào
là chiều cao mức nước L(mm),đầu ra là tín hiệu dòng điện I(mA) tương ứng với
giá trị nhiệt độ thực tế: Với K =0.023(mA/mm); l τl=0.5s lOMoAR cPSD| 58675420
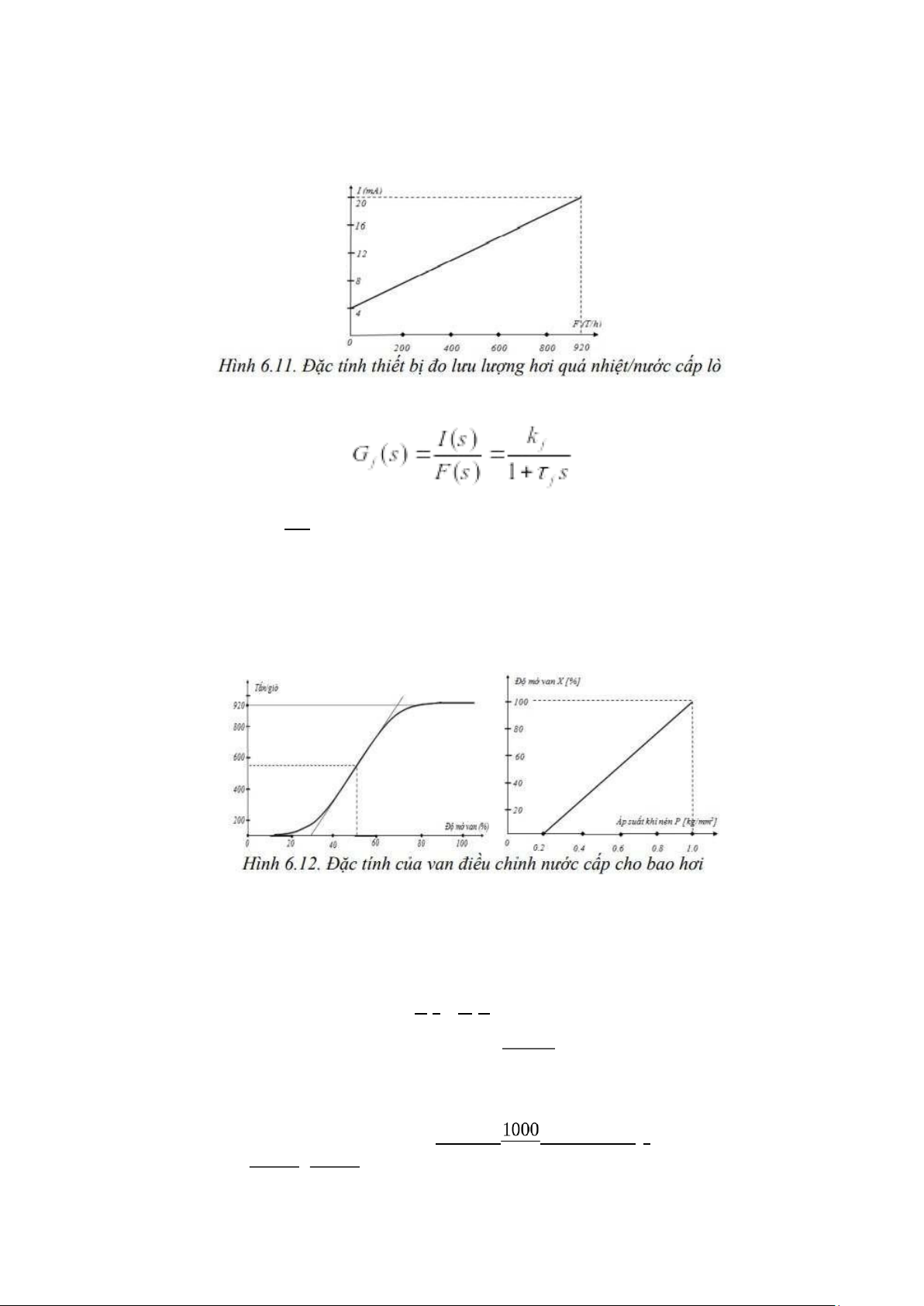
2.2 Hàm truyền của thiết bị đo mức trong lò bao hơi:
Hàm truyền của thiết bị đo lưu lượng hơi quá nhiệt/cấp nước lò: mA
Trong đó Kf =0.063 kg/s ;τf =0.25 s
2.3 Hàm truyền của van nước trong lò bao hơi:
Hàm truyền của van cấp nước cho lò hơi được xấp xỉ là 1 khâu quán tính bậc nhất có trễ :
F (s) X (s ) K θs ve−v
Gv (s)= X (s) . P (s) = 1+τ v s
Dựa vào đặc tính van cấp nước ta có ∆ Xmax ∆Fmax 100 920 kg/s Kv=
∆ Pmax . ∆ X max = 0.8 . 65 . 3600=491.5 kg/c m2 lOMoAR cPSD| 58675420
Thời gian quá độ lấy bằng τ v=5.5s và thời gian trễ lấy bằng θv=1.2s
2.4 Hàm truyền của bộ chuyển đổi dòng điện khí nén ( I/P ): ∆ Pmax kg/cm2 K IP= ∆ Imax =81 mA
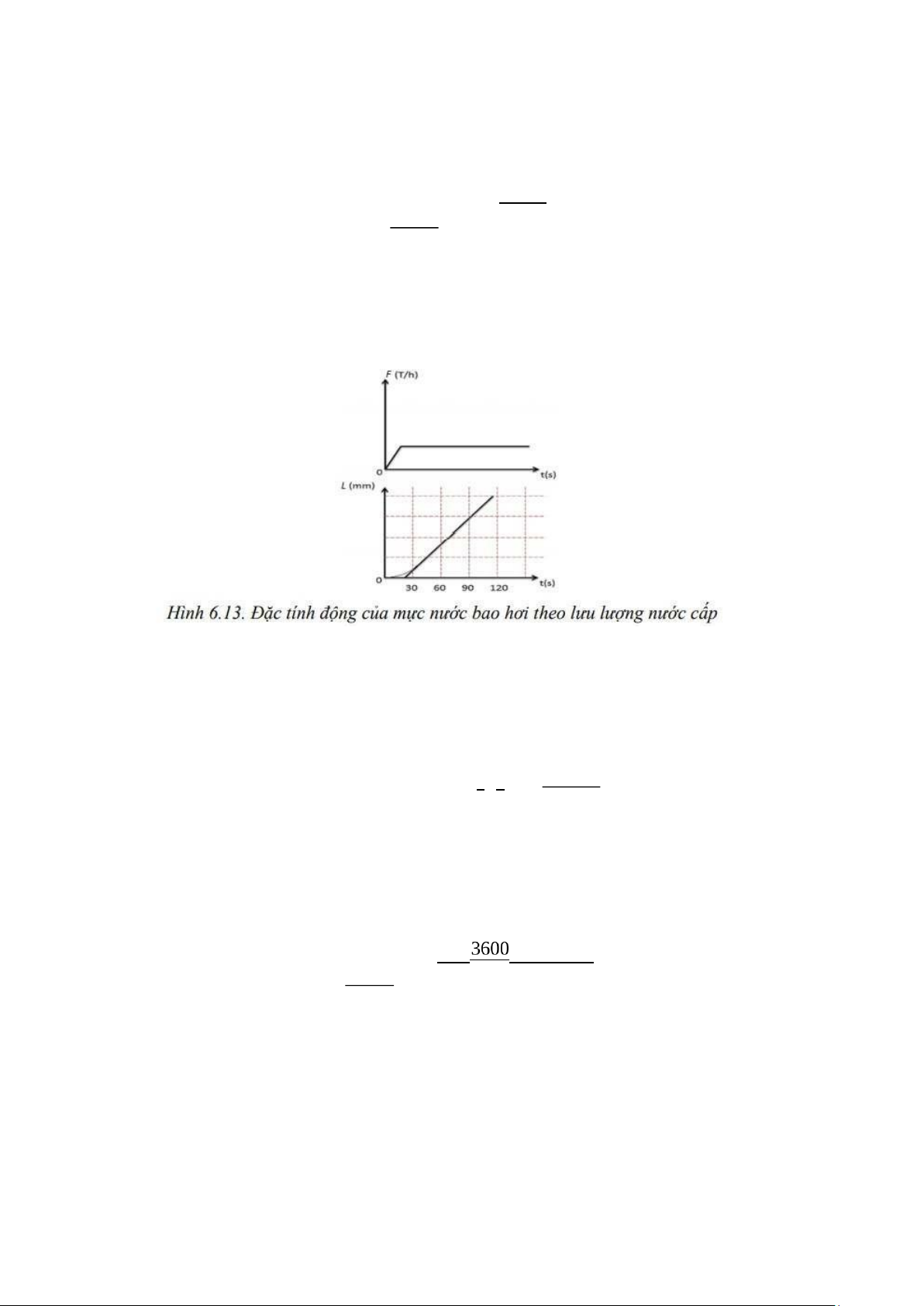
2.5 Hàm truyền của quá trình mức nước bao hơi;
Quá trình động học mức nước trong bao hơi có thể được xác định gần đúng dựa
vào đường đặc tính của mức nước bao hơi với đầu vào là lưu lượng nước,đầu ra
là đáp ứng của mức nước trong bao hơi:
Căn cứ vào đặc tính đáp ứng trên,ta thấy hàm truyền của mức nước bao hơi không
có tính tự cân bằng và được mô tả dưới dạng gần đúng là một khâu tích phân có trễ:
Gb (s)= FL((SS)) = Kb es−θbs
Trong đó K là hệ số khuếch đại của quá trình mức nước bao hơi; là hằng số thời b θb gian trễ.
Dựa vào đáp ứng của mức nước bao hơi, ta tính được ∆Lmax 700 mm Kb=
∆Fmax =920 . 1000=2.74 kg/s
Thời gian trễ của quá trình mức nước bao hơi được xác định từ đồ thị đáp ứng là θb=20.1s lOMoAR cPSD| 58675420
2.6 Thiết kế bộ điều khiển PID cho quá trình mức nước bao hơi:
2.6.1 Giai đoạn khởi động lò:
cho lò hơi được xấp xỉ là 1 khâu quán Hàm
truyền của đối tượng điều khiển có dạng:
G=GI /PGV GBGl 1+5.5 s s 1+0.5 s
Thực hiện xấp xỉ Taylor với thành phần phi tuyếne−θs≈(1+θs) ta được 2508.92073 G=
s(20.1s+1)(5.5s+1)(1.2s+1)(0.5s+1)
Áp dụng phương pháp tổng các hằng số thời gian nhỏ ,ở dải tần số thấp s nhỏ,ta
có thể bỏ qua thành phần bậc cao của s,lúc này dạng gần đúng của đối tượng điều khiển như sau: 2508.92073 k G= =
s(20.1s+1)(7.2s+1)
Ts(T 1 s+1)(T 2 s+1)
Theo phương pháp tối ưu đối xứng với đối tượng trên là khâu tích phân quán tính
bậc 2 nên bộ điều khiển được chọn là khâu PID có dạng: G ( c (s)=K P
1+T1I s+T D s)=
KP (1+TTA Iss)(1+T B s)=KP+ KsI +K D s
Ta tính được: T A=T1=20.1
T B=4×T2=4×7.2=28.8
T I =T A+T B=48.9 T A T B T D= T I=11.8 T T I 1 48.9 −5 K P=2kT2
4T2=2×2508.92073×7.2 . 4 ×7.2=4.699×10 KP 4.699×10−5 −7 K I= T I = 48.9 =9.6094×10 lOMoAR cPSD| 58675420
K D=K P T D=4.699×10−5×11.8=5.54482×10−4 Ta có
thông số bộ điều khiển PID:
K P=4.699×10−5 ;KI =9.6094×10−7;K D=5.54482×10−4
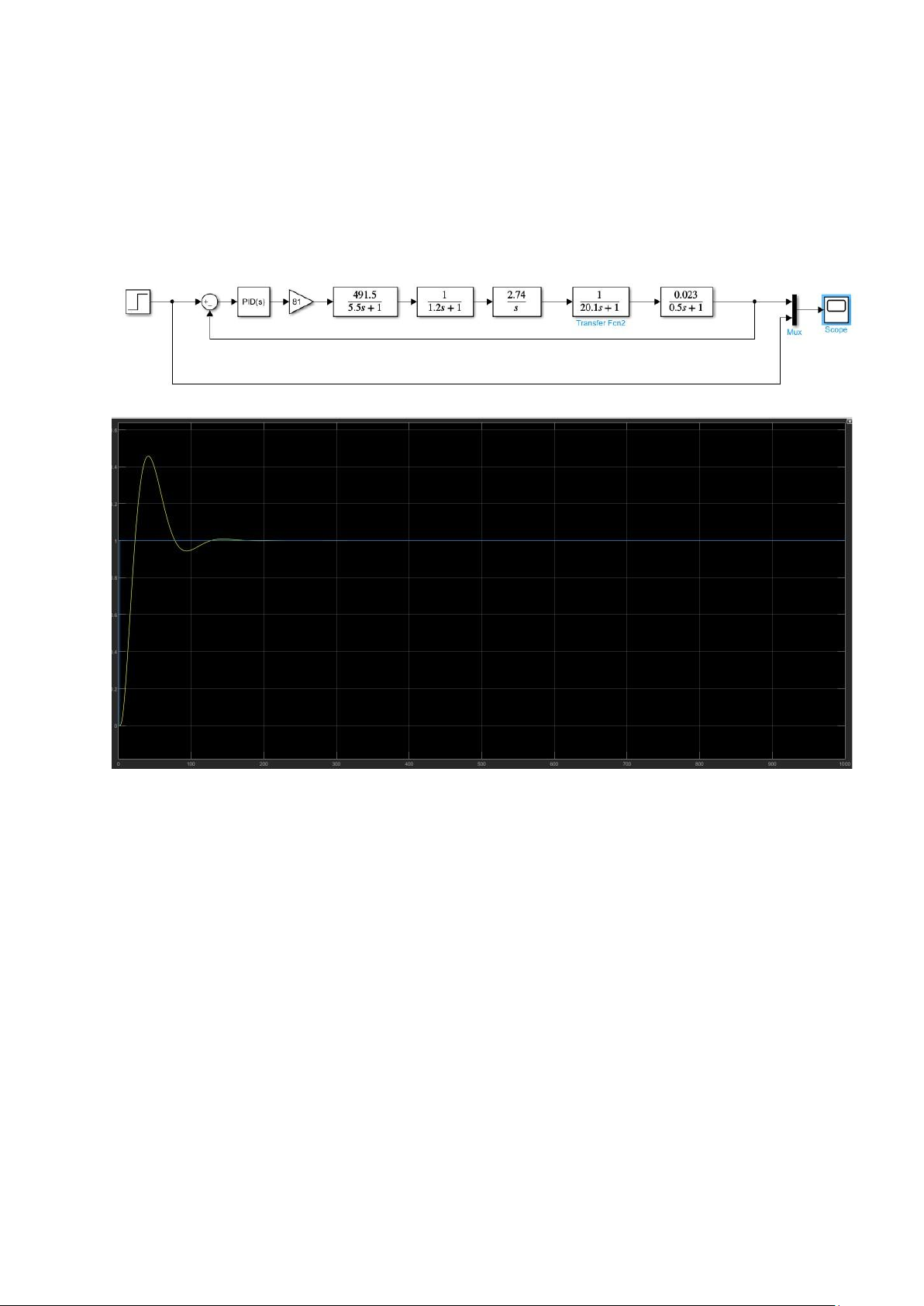
a. Sử dụng simulink Mô phỏng simulink
b. Sử dụng Command window >> s=tf('s'); >> W1=491.5/(5.5*s+1); >> W2=1/(1.2*s+1); >> W3=2.74/s; >> W4=1/(20.1*s+1); lOMoAR cPSD| 58675420 >> W5=0.023/(0.5*s+1);
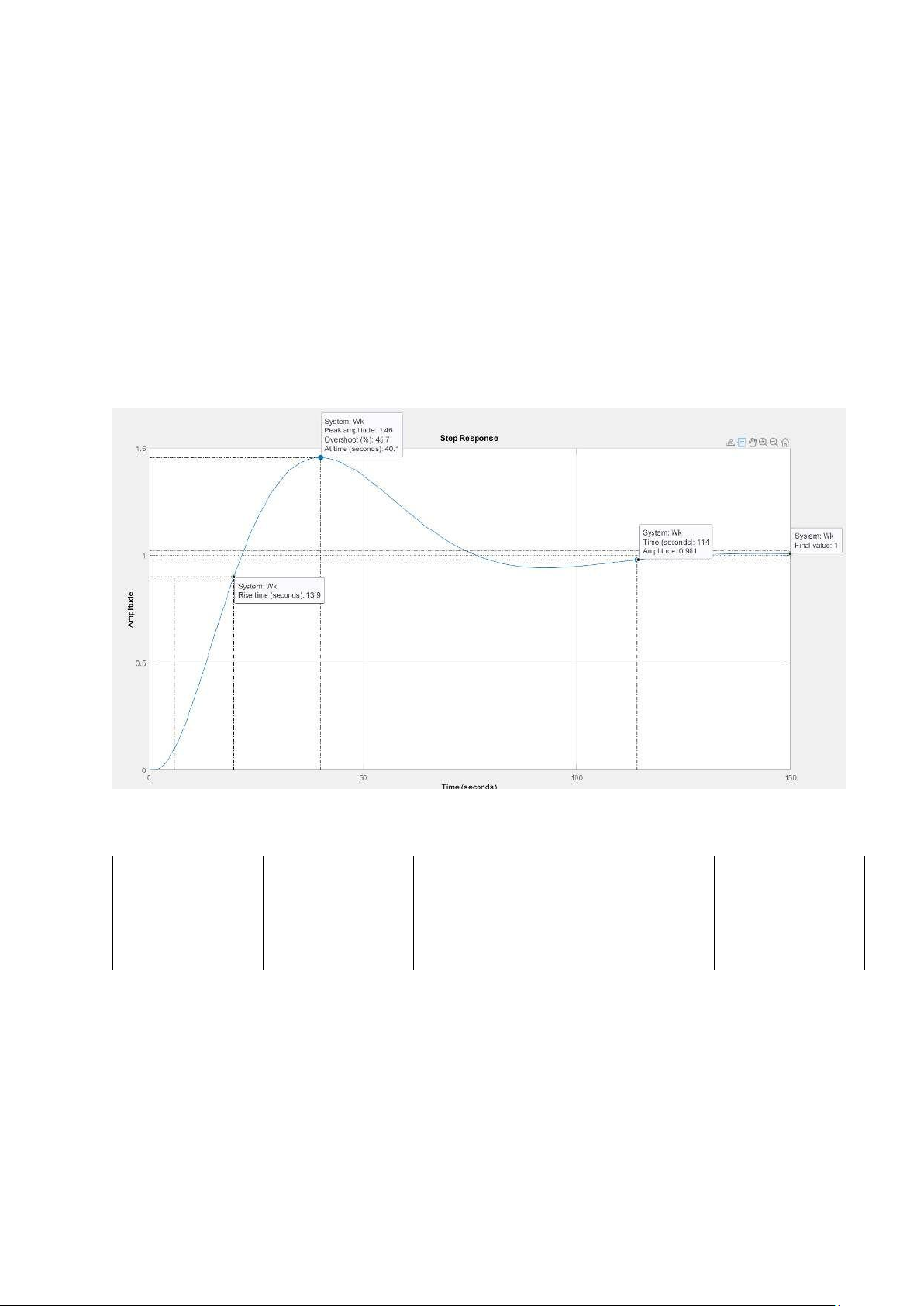
>> WPID=0.00004699+(0.00000096094/s)+0.000554482*s; >> W=W1*W2*W3*W4*W5*81; >> Wh=WPID*W; >> Wk=feedback(Wh,1); >> step(Wk) Bộ điều khiển Độ quá Thời gian
Thời gian xác Sai số xác lập và tiêu chí điều chỉnh tăng trưởng lập E δ(%) tr(s) ts(s) PID 45.7% 13.9 114 0
Nhận xét :Kết quả mô phỏng cho thấy ở giai đoạn khởi động lò, với bộ điều khiển
PID được thiết kế theo nguyên lý tối ưu đối xứng thì hệ thống cho đáp ứng mức
nước bao hơi có độ quá điều chỉnh khá lớn ~45.7%, thời gian xác lập lớn 144s,
bám theo giá trị đặt với sai số xác bằng 0.
2.6.2 Giai đoạn vận hành lò lâu dài:
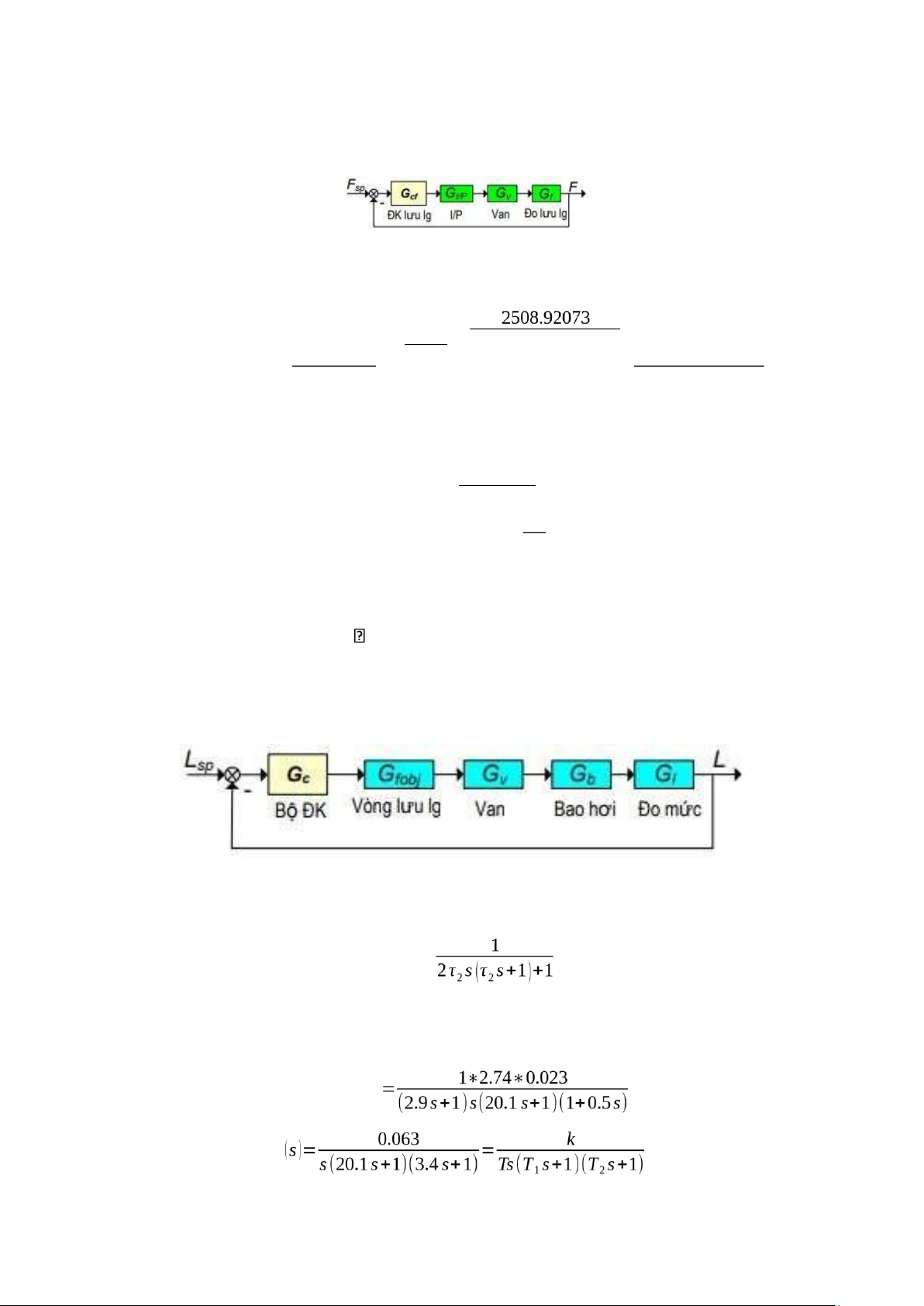
Tổng hợp mạch vòng điều khiển lưu lượng van cấp nước: lOMoAR cPSD| 58675420
Ta được sơ đồi khối mạch vòng điều khiển lưu lượng nước cấp vào lò hơi như sau:
Hàm truyền của đối tượng sau khi thực hiện xấp xỉ Taylor, tổng các hằng số thời
gian nhỏ có dạng gần đúng như sau: −1.2s 491.5e 0.063k
G=GI /PGV Gf =81 = = 1+5.5s 1+0.25s
(1+5.5s)(1.45 s+1)
(T1 s+1)(T2 s+1)
Áp dụng phương pháp tối ưu độ lớn với đối tượng điều khiển là khâu quán tính
bậc 2,bộ điều khiển là PI: 1 K I R ( ) F (s)=k p 1+T I s =k p+ s
Ta tính toán được thông số như sau: TI = T1= 5.5; Kp=TI /2*k*T2 = 7.559233345x10−4 Kp = 7.559233345x10−4 KI = 1.374406063x10−4
3. Tổng hợp mạch vòng điều khiển mức nước bao hơi:
Hàm truyền đạt tương đương của mạch vòng điều khiển lưu lượng nước cấp vào lò có dạng : Gfobj ( s)=
Hàm truyền đạt của đối tượng sau khi áp dụng phương pháp tổng các hằng số thời gian nhỏ có dạng:
G (s)=GfobjGb GI G lOMoAR cPSD| 58675420
Áp dụng phương pháp tối ưu đối xứng khi đối tượng điều khiển là khâu quán tính
bậc 2 thì bộ điều khiển tối ưu được chọn là PID: G ( c (s)=kp
1+T11 s+T D s)=
k p(1+T ATs1)(s 1+T B s)=k p+ ksI +k D s
Chọn a = 4, do đó T A=T 1=20.1;T B=4T 2=4 ×3.4=13.6 T A T B TI = TA + TB = 33.7; TD = T I =8.1 K = T T p 2k T 2 4 TI2 =5.7842 KI = 0.1716 KD = 46.8518
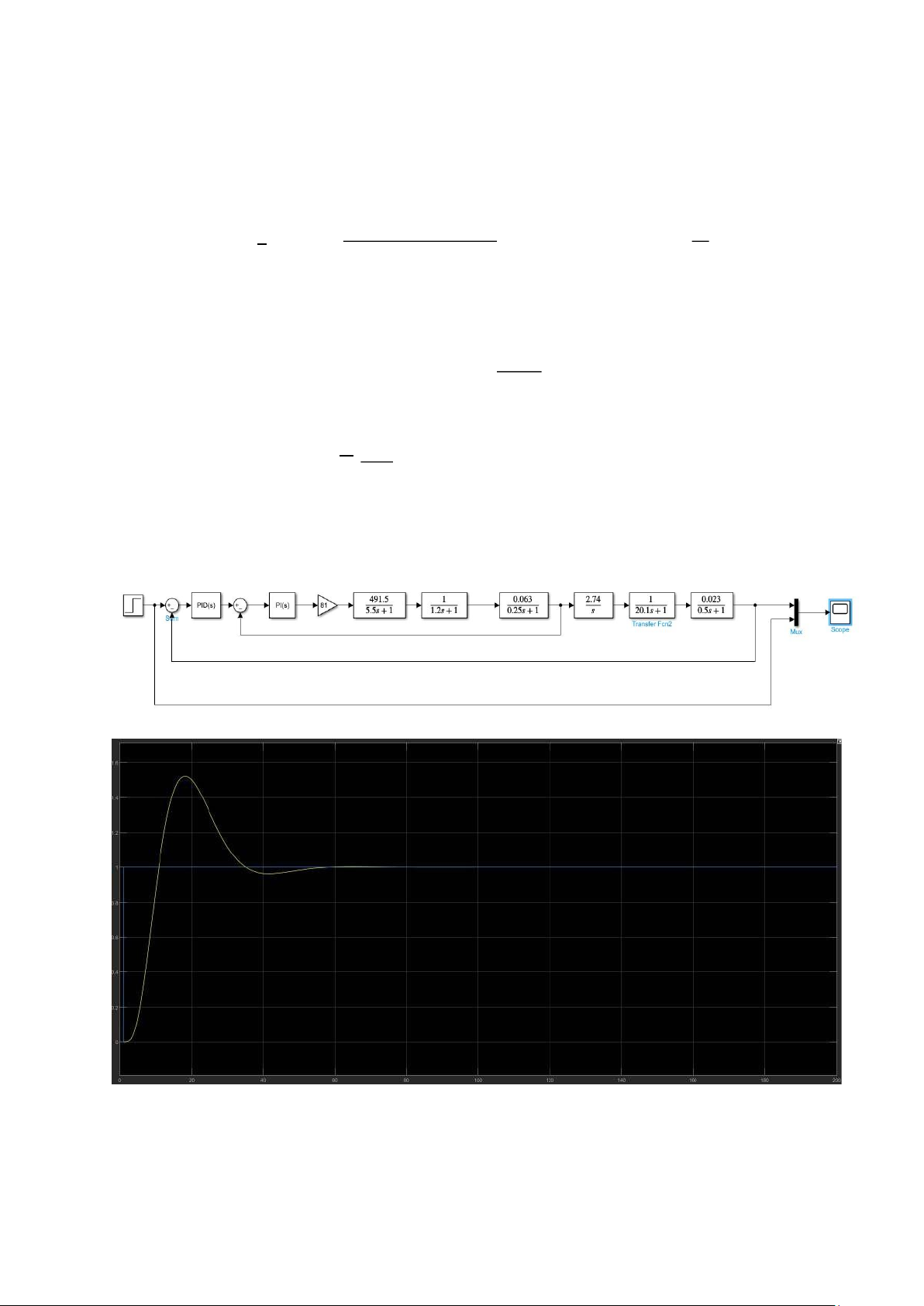
a. Sử dụng Simulink Mô phỏng simulink lOMoAR cPSD| 58675420
b. Sử dụng Command window >> s=tf('s'); >> W1=491.5/(5.5*s+1); >> W2=1/(1.2*s+1); >> W3=2.74/s; >> W4=1/(20.1*s+1); >> W5=0.023/(0.5*s+1); >> W6=0.063/(0.25*s+1); >> WT1=81*W1*W2*W6;
>> WPI=0.0007559233345+0.0001374406063/s; >> Wh1=WPI*WT1;
>> Wk1=feedback (Wh1, 1); >> W7=W3*W4*W5*Wk1;
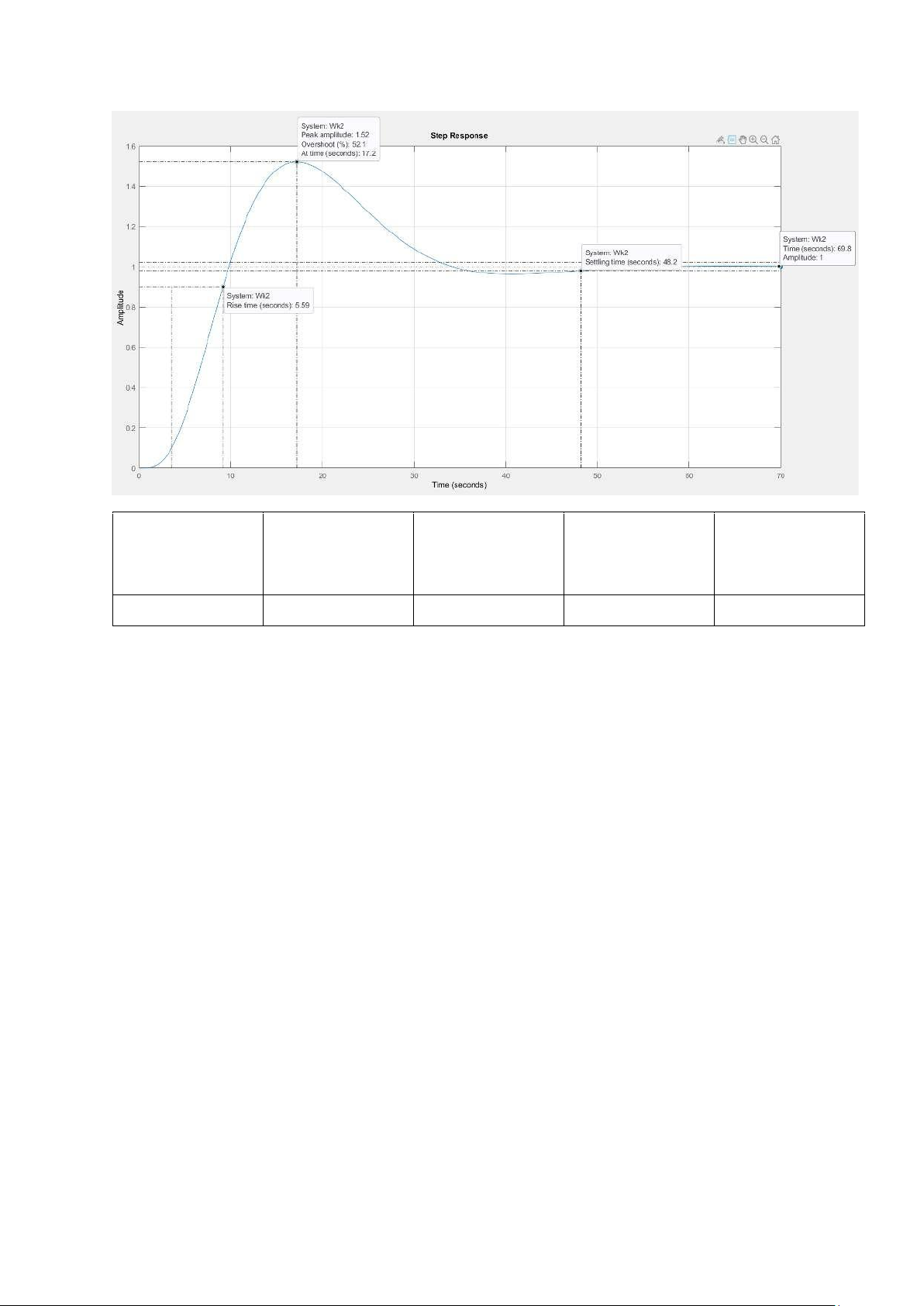
>> WPID=5.7842+0.1716/s+46.8516*s; >> Wh2=WPID*W7; >> Wk2=feedback(Wh2,1); >> step(Wk2); lOMoAR cPSD| 58675420 Bộ điều khiển Độ quá Thời gian
Thời gian xác Sai số xác lập và tiêu chí điều chỉnh tăng trưởng lập E δ(%) tr(s) ts(s) PID 52.1% 5.59 48.2 0
Nhận xét :Kết quả mô phỏng cho thấy ở giai đoạn lò hoạt động lâu dài, với bộ
điều khiển PID được thiết kế theo nguyên lý tối ưu đối xứng thì hệ thống cho đáp
ứng mức nước bao hơi có độ quá điều chỉnh khá lớn ~52%, thời gian xác lập
48.2s, bám theo giá trị đặt với sai số xác bằng 0.
Tài liệu liên quan:
-

Phân tích và thiết kế hệ thống quản lý hoạt động quán Internet Thoa Trường, đường Phú Diễn, Bác Từ Liêm, Hà Nội | Môn Phân tích thiết kế hệ thống - Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội
90 45 -

Giáo án Môn Phân tích thiết kế hệ thống | Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội
102 51 -

Phân Tích Thiết Kế Hệ Thống Bán Hàng Online Của FiinStore | Môn Phân tích thiết kế hệ thống - Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội
110 55 -

Sử dụng công cụ hỗ trợ phân tích thiết kế EA phân tích hệ thống thư viện trường Đại học | Báo cáo Môn Phân tích thiết kế hệ thống - Trường Cao đẳng Công Nghệ Bách Khoa Hà Nội
72 36