Tài liệu chương 1 nguyên lý chi tiết máy | Đại học Kinh tế kỹ thuật công nghiệp
Khâu cố định và khâu động. Khâu là gì: Trong cơ cấu và máy, toàn bộ những bộ phận có chuyển động tương đối với các bộ phận khác gọi là KHÂU. Khâu gồm 1 hoặc một số chi tiết máy ghép cố định lại với nhau, khâu được chia làm khâu cố định và khâu động. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Môn: Chi tiết máy 1 10 tài liệu
Trường: Trường Đại học Kinh tế kỹ thuật công nghiệp 1.7 K tài liệu
Tác giả:



Preview text:
lOMoAR cPSD| 40551442
GIỚI THIỆU MÔN HỌC
NGUYÊN LÝ – CHI TIẾT MÁY là môn học tích hợp từ 2 môn học Nguyên lý
máy và Chi tiết máy, học phần này sẽ cung cấp cho sinh viên những kiến thức cơ bản về
máy bao gồm như : Cấu trúc về máy, phân tích đông học cơ cấu, truyền động cơ khí và các
chi tiết máy liên kết trong máy. Môn học giúp sinh viên có kỹ năng tính toán động học cơ
cấu máy và tính toán thiết kế các chi tiết máy có công dụng chung (chi tiết máy có 2 loại
là loại có công dụng riêng và chi tiết máy có công dụng chung). Môn học cũng giúp sinh
viên rèn luyên tác phong làm việc khoa học, tính cẩn thận của người làm công tác kỹ thuật.
Học phần Nguyên lý – Chi tiết máy thuộc kiến thức cơ sở ngành và nhóm ngành, đóng vai
trò quan trọng trong các chương trình đào tạo kỹ sư về công nghệ kỹ thuật cơ khí, cơ điện tử.
Chuẩn đầu ra của học phần: 1.
Nắm vững các khái niện, các chỉ tiêu về khả năng làm việc, nguyên lý làm
việc, phạm vi sử dụng của các cơ cấu máy, các chi tiết máy có công dụng chung. 2.
Phân tích và ứng dụng kiến thức về cơ sở tính toán thiết kế chi tiết máy để
tính toán động học cơ cấu máy và chi tiết máy. 3.
Phân tích và giải quyết các vấn đề về tính toán động lực học các truyền động
cơ khí và các liên kết trong máy. 4.
Đọc và hiểu một số tài liệu viết bằng tiếng Anh liên quan đến nội dung của học phần. 5.
Ứng dụng kiến thức của học phần và tính toán thiết kế các chi tiết máy có
công dụng chung và bộ phận máy Nội dung học phần:
Chương 1: Cấu trúc cơ cấu
Chương 2: Phân tích động học cơ cấu
Chương 3: Phân tích lực cơ cấu
Chương 4: Các chi tiết máy ghép
Chương 5: Cơ cấu truyền động
Chương 6: Các cơ cấu đỡ và nối lOMoAR cPSD| 40551442
Chương 1: Cấu trúc cơ cấu
Mục tiêu chương 1, cung cấp cho sinh viên những kiến thức cơ bản phần cấu trúc
cơ cấu của máy, logic với kiến thức động học và động lực học cơ cấu.
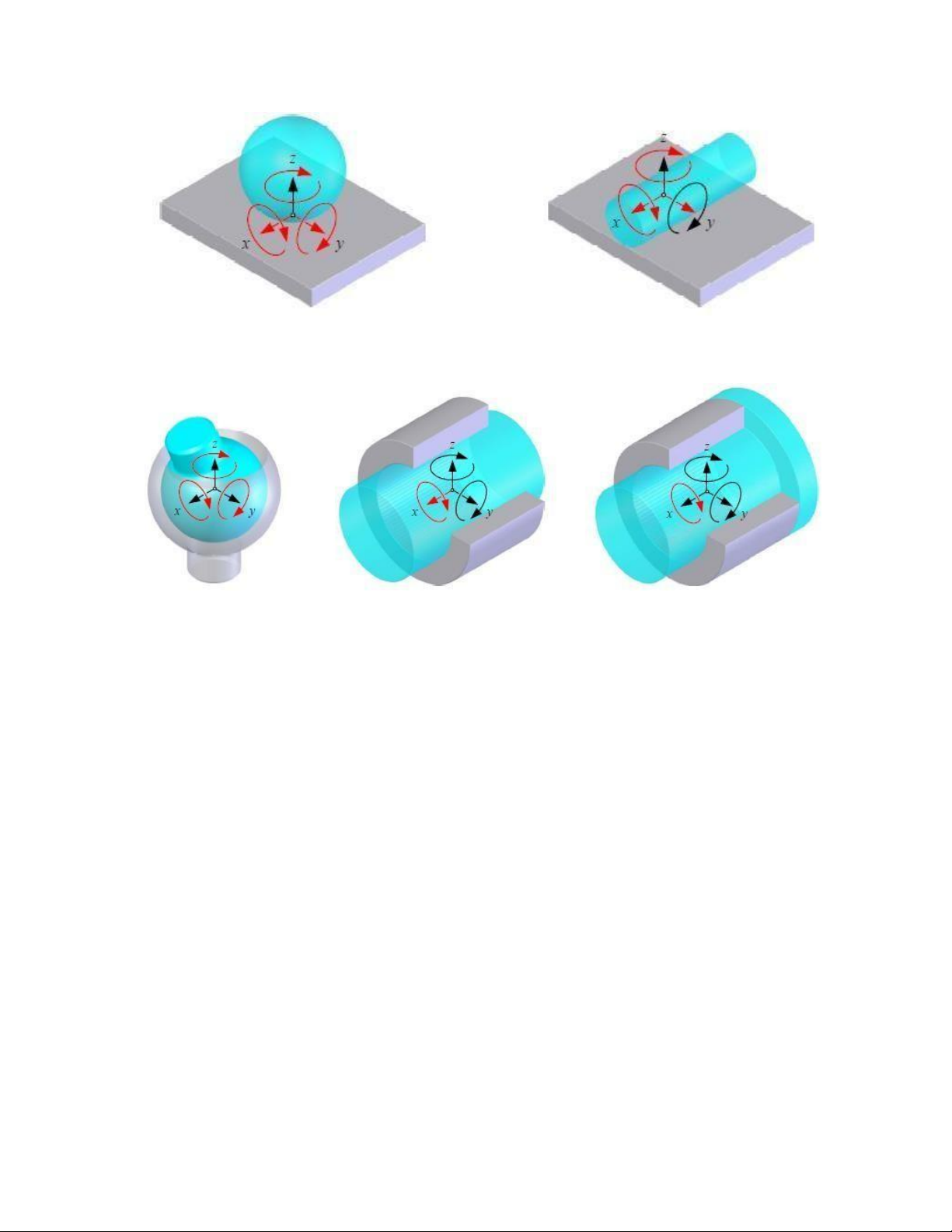
1.1. Định nghĩa và những khái niệm cơ bản 1.1.1. Bậc tự do - Bậc tự do của khâu:
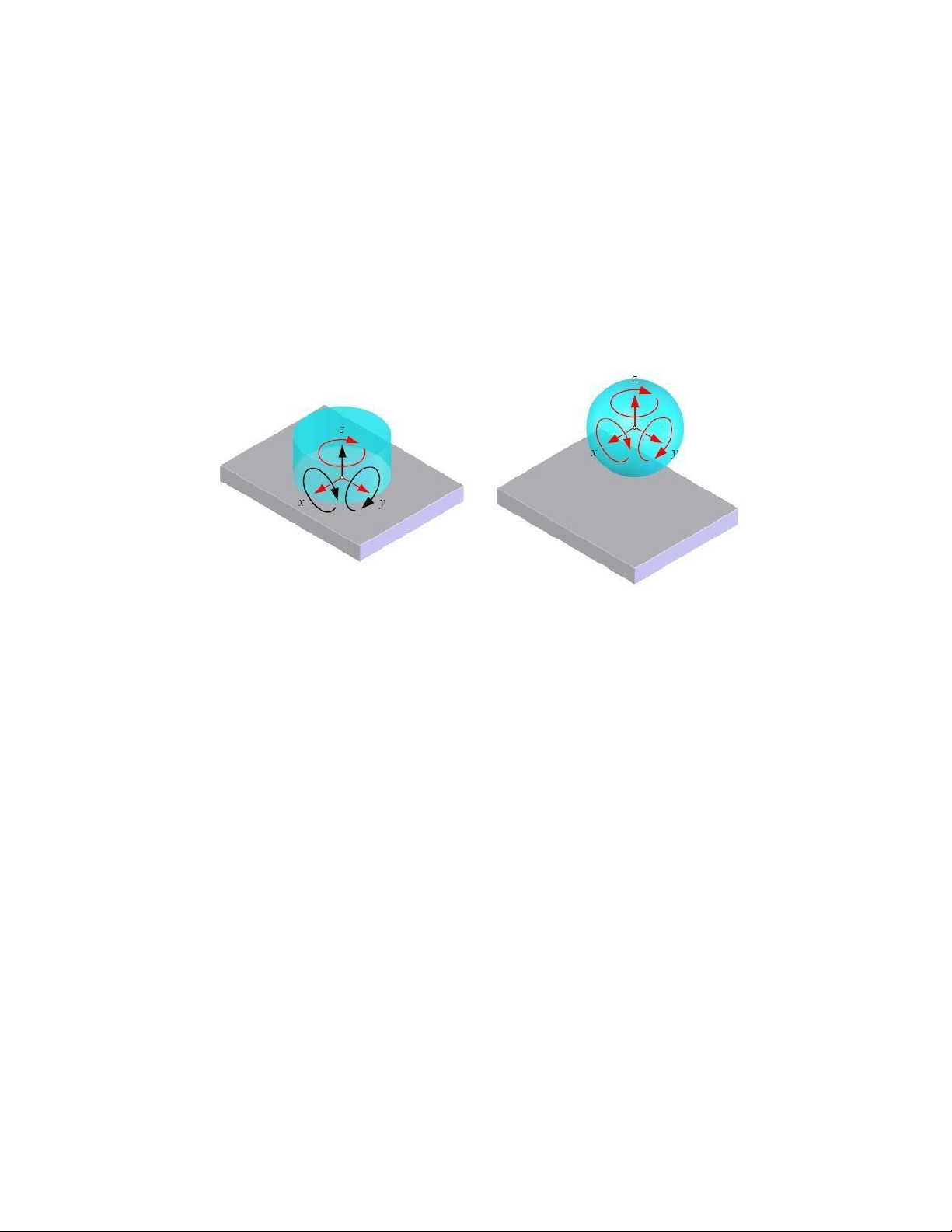
Hình 1.1. Bậc tự do giữa hai khâu trong mặt phẳng và trong không gian
+ Một khả năng chuyển động độc lập đối với một hệ quy chiếu → một bậc tự do
+ Giữa hai khâu trong mặt phẳng → 3 bậc tự do: Tx , Ty , Qz
+ Giữa hai khâu trong không gian → 6 bậc tự do: Tx , Ty , Tz , Qx , Qy , Qz
- Bậc tự do của cơ cấu: Là số khả năng chuyển độc độc lập của cơ cấu
1.1.2. Khâu cố định và khâu động
- Khâu là gì: Trong cơ cấu và máy, toàn bộ những bộ phận có chuyển động tương
đối với các bộ phận khác gọi là KHÂU. Khâu gồm 1 hoặc một số chi tiết máy ghép cố
định lại với nhau, khâu được chia làm khâu cố định và khâu động lOMoAR cPSD| 40551442
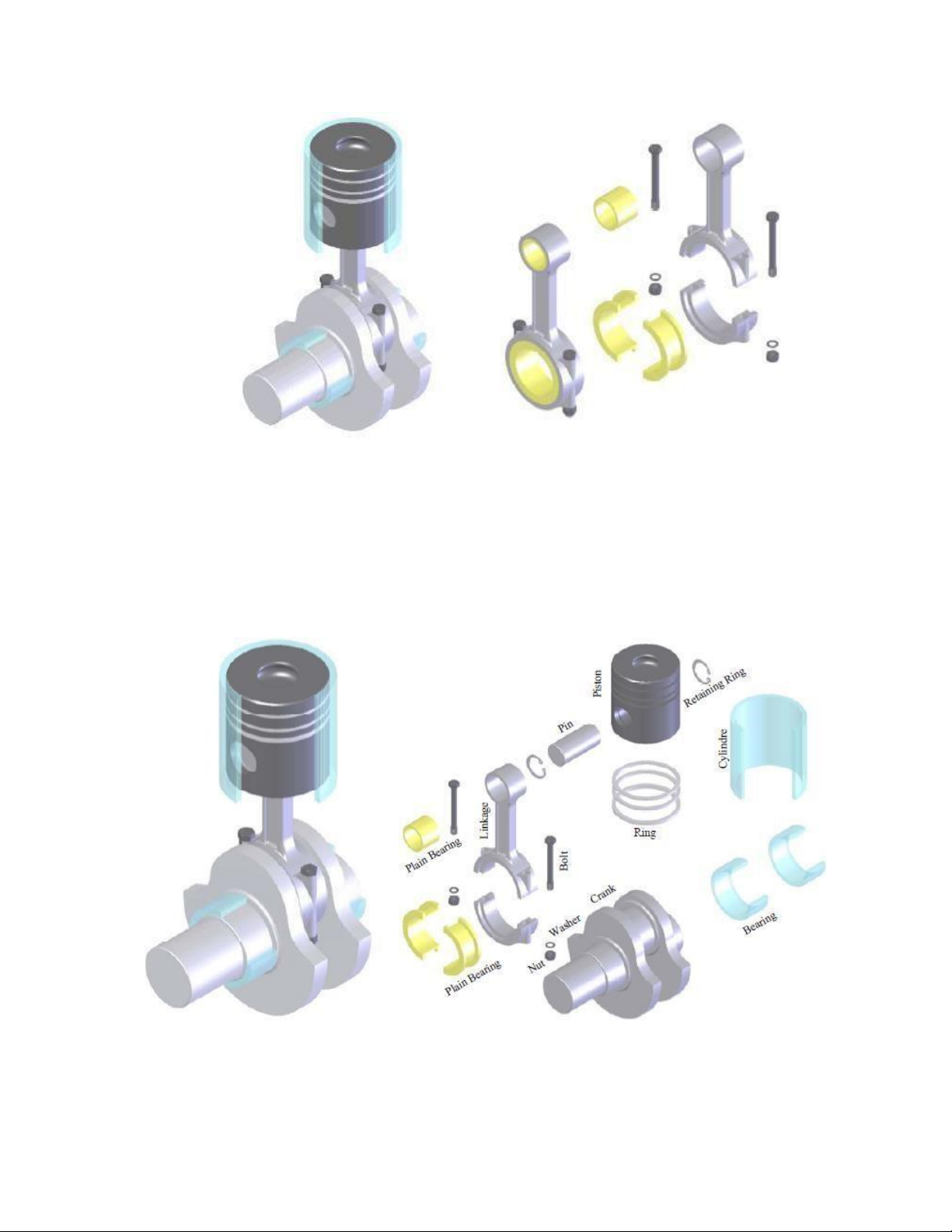
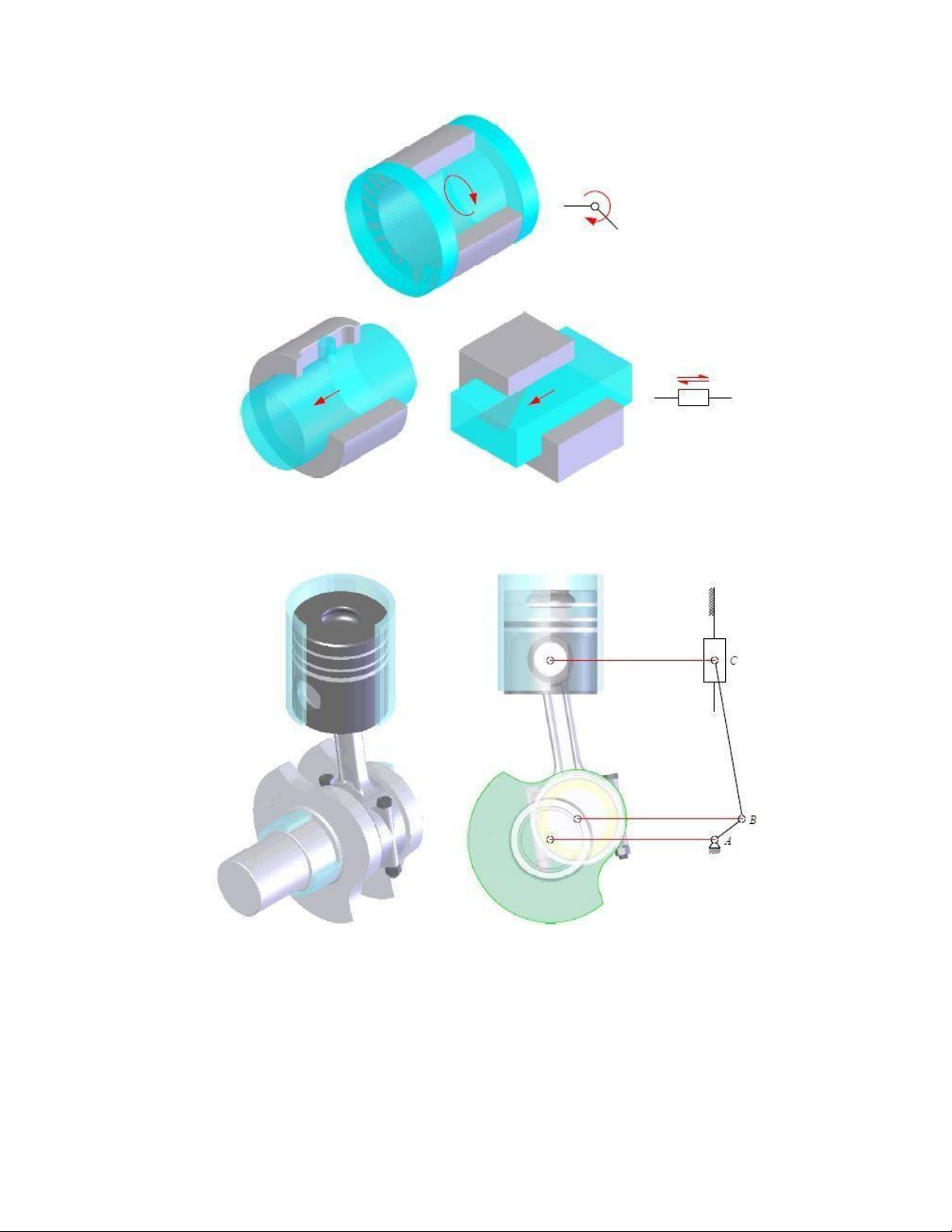
Hình 1.2. Cơ cấu tay quay con trượt và khâu -
Khâu cố định (giá): ví dụ khung máy là khâu cố định -
Khâu động: Trên một máy, trừ khâu cố định ra các khâu còn lại chuyển động
là khâu động. Khâu động được chia làm 2 loại: khâu dẫn và khâu bị dẫn. -
Chi tiết máy (tiết máy): máy hay cơ cấu có thể tháo rời ra thành nhiều bộ
phận khác nhau, bộ phận không thể tháo rời ra được nữa gọi là chi tiết máy.
Hình 1.3. Cơ cấu tay quay con trượt và chi tiết lOMoAR cPSD| 40551442 -
Cơ cấu: Cơ cấu là tập hợp những vật thể chuyển động theo quy luật xác định,
có nhiệm vụ biến đổi hay truyền chuyển động
Ví dụ: + Cơ cấu bánh răng truyền chuyển động quay từ trục chủ động sang trục bị động
Hình 1.4. Cơ cấu bánh răng
+ Cơ cấu tay quay con trượt biến chuyển động quay thành chuyển động tịnh tiến khứ hổi
Hình 1.5. Cơ cấu tay quay con trượt
- Máy: Máy là tập hợp những cơ cấu, có nhiệm vụ biến đổi hay sử dụng cơ năng để làm ra công có ích.
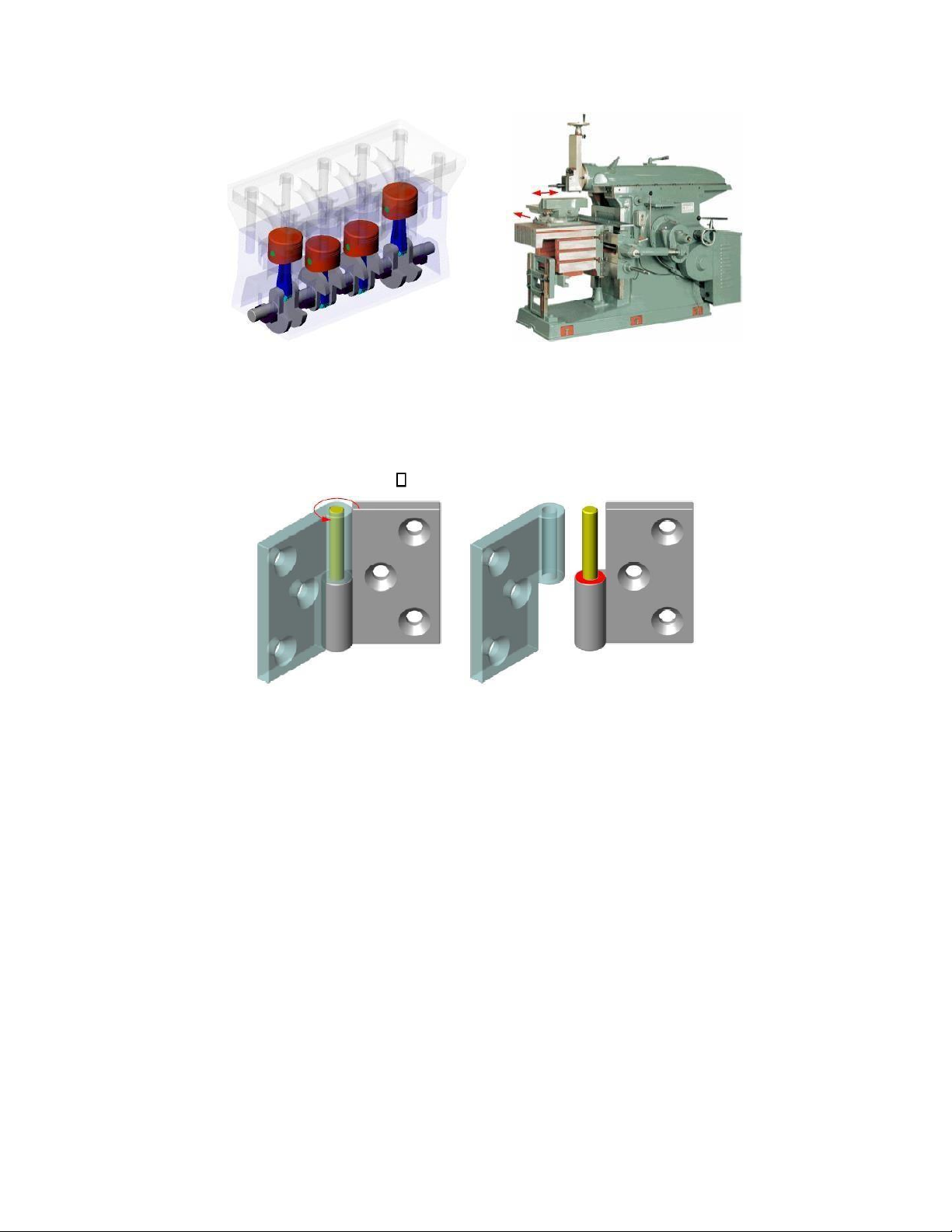
+ Ví dụ: Động cơ nổ, máy bào ngang... lOMoAR cPSD| 40551442
Hình 1.6. Động cơ nổ và máy bào ngang
1.1.3. Khớp động - Nối động: để tạo thành cơ cấu, các khâu không thể để rời nhau mà
phải được liên kết với nhau theo một quy luật xác định nào đó sao cho sau khi nối nhau các khâu vẫn còn có khả năng chuyển động tương đối nối động các khâu.
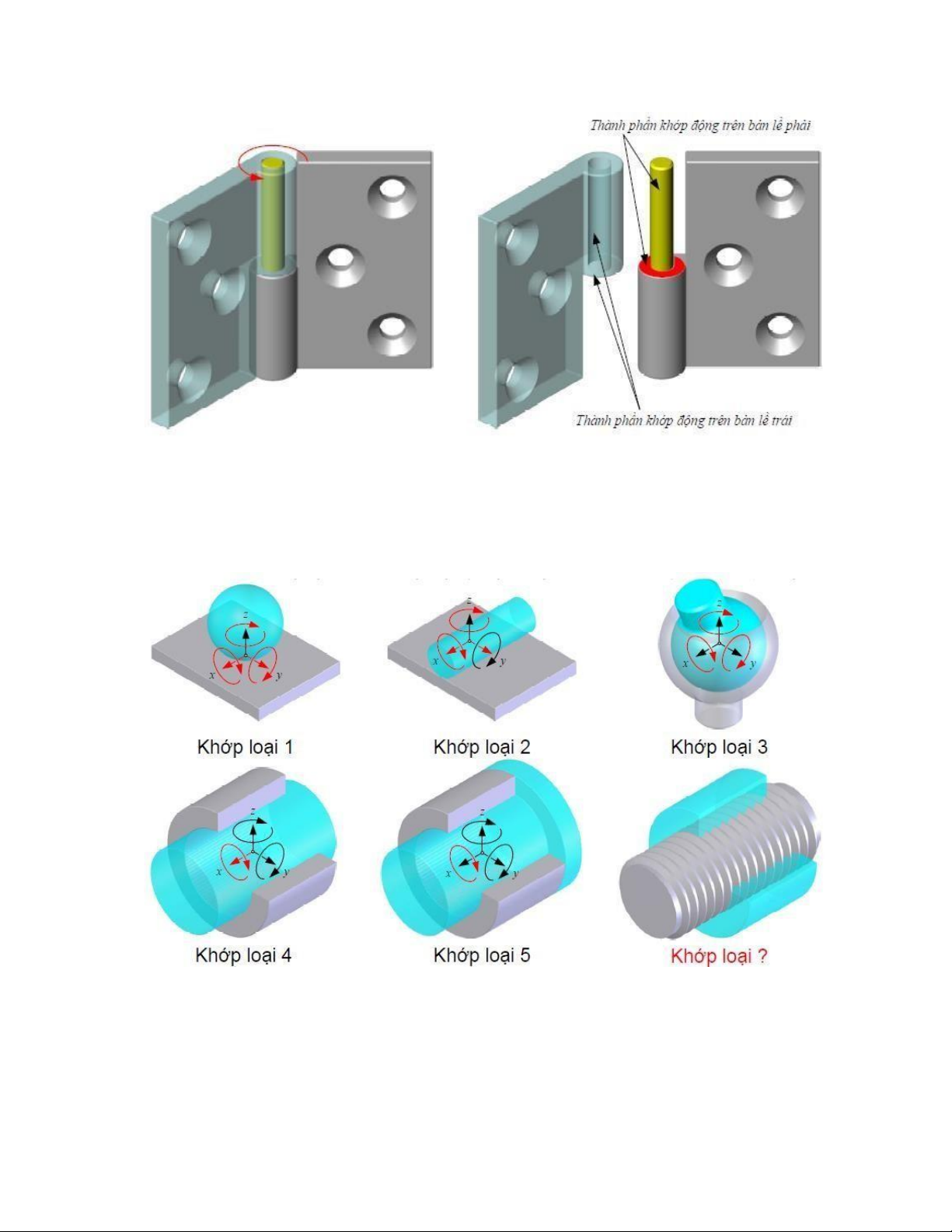
Hình 1.7. Khớp bản lề -
Thành phần khớp động, khớp động:
+ Khi nối động, các khâu sẽ có thành phần tiếp xúc. Toàn bộ chỗ tiếp xúc giữa hai khâu
gọi là một thành phần khớp động
+ Hai thành phần khớp động trong một phép nối động hai khâu hình thành nên một
khớp động. Khớp động làm hạn chế chuyển động của các khâu nối với nhau. lOMoAR cPSD| 40551442
Hình 1.8. Thành phân khớp bản lề - Phân loại khớp động:
+ Theo số bậc tự do bị hạn chế: Khớp động loại k hạn chế k bậc tự do hay có k ràng buộc Hình 1.9. Khớp
+ Theo đặc điểm tiếp xúc:
→ Khớp cao: thành phần khớp động là điểm hay đường lOMoAR cPSD| 40551442 Hình 1.10. Khớp cao
→ Khớp thấp: thành phần khớp động là mặt Hình 1.11. Khớp thấp + Theo dạng tiếp xúc:
→ Khớp loại thấp: tiếp xúc theo bề mặt : khớp quay, tịnh tiến, khớp vít
→ Khớp loại cao: tiếp xúc theo đường hoặc điểm
1.1.4. Chuỗi động
Nhiều khâu nối với nhau bởi một số khớp động tạo thành một chuỗi động.
- Phân loại chuỗi động: + Chuỗi động kín, + Chuỗi động hở, + Chuỗi động phẳng,
+ Chuỗi động không gian. lOMoAR cPSD| 40551442 a) b)
Hình 1.12. a) Chuỗi động kín, phẳng; b) chuỗi động hở, không gian 1.1.5. Cơ cấu
- Là một chuỗi động có một khâu cố định và các khâu khác chuyển động theo một quy luật
xác định. Khâu cố định gọi là giá a) b)
Hình 1.13. a) Cơ cấu kín, phẳng; b) cơ cấu hở, không gian -
Phân lại: Cơ cấu kín, cơ cấu hở, cơ cấu phẳng, cơ cấu không gian, hoặc cơ cấu đơn
giản, cơ cấu phức tạp 1.1.6. Lược đồ
- Để thuận tiện cho việc nghiên cứu, các khớp được biểu diễn trên những hình vẽ bằng
những lược đồ quy ước. lOMoAR cPSD| 40551442
Hình 1.14. Lược đồ quy ước của khớp quay, khớp tịnh tiến
- Các khâu cũng được thể hiện qua các lược đồ đơn giản gọi là lược đồ khâu:
Hình 1.15. Lược đồ quy ước của các khâu
- Trên lược đồ khâu phải thể hiện đầy đủ các khớp động, các kích thước có ảnh hưởng đến
chuyển động của khâu và chuyển động của cơ cấu - Lược đồ của một số khớp thông dụng: lOMoAR cPSD| 40551442
Bảng 1.1. Lược đồ quy ước của một số khớp thông dụng
1.2. Bậc tự do của cơ cấu
Bậc tự do (W) của cơ cấu là số thông số độc lập cần thiết để xác định hoàn toàn vị trí của
cơ cấu, nó cũng là số khả năng chuyển động tương đối độc lập của cơ cấu đó. lOMoAR cPSD| 40551442
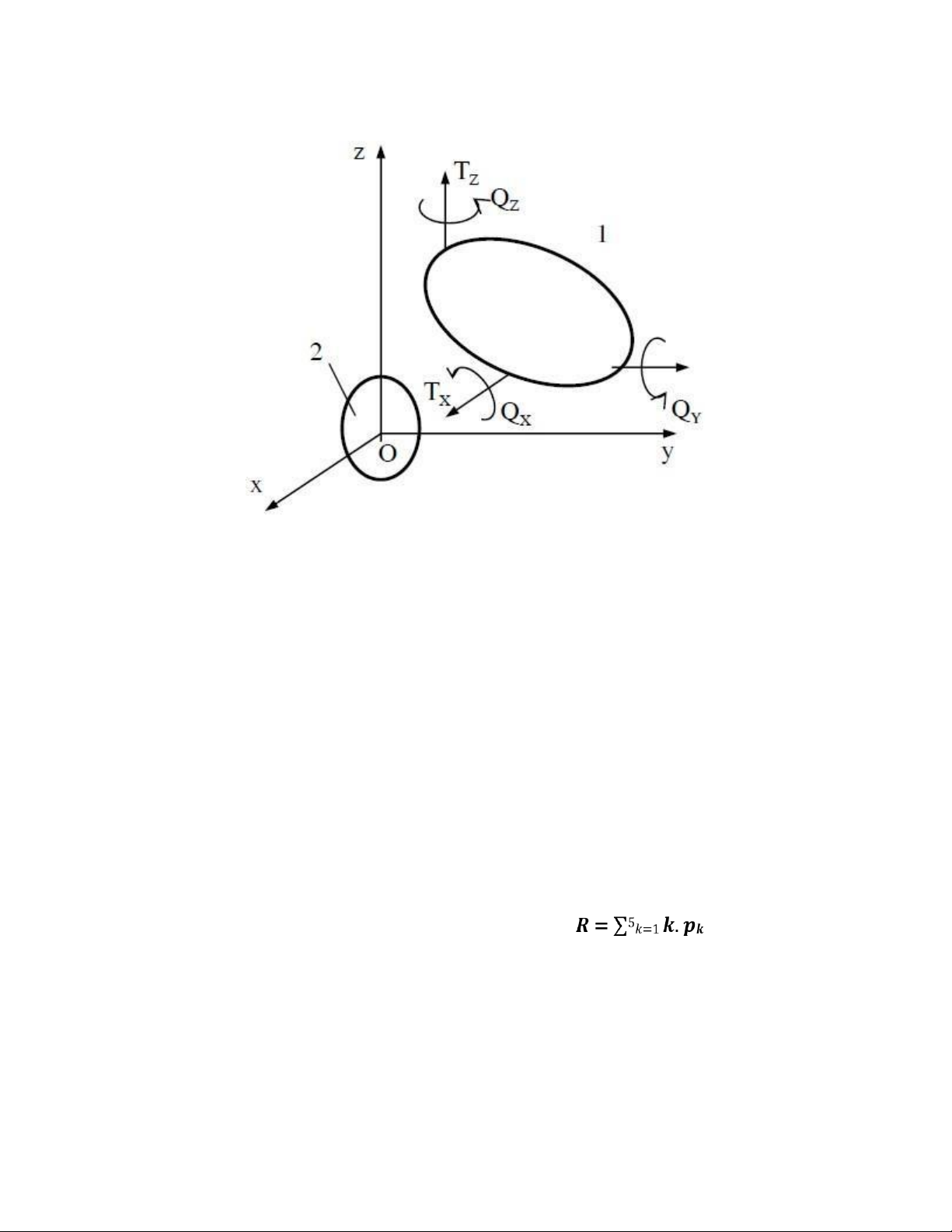
1.2.1. Bậc tự do của cơ cấu không gian (trường hợp tổng quát)
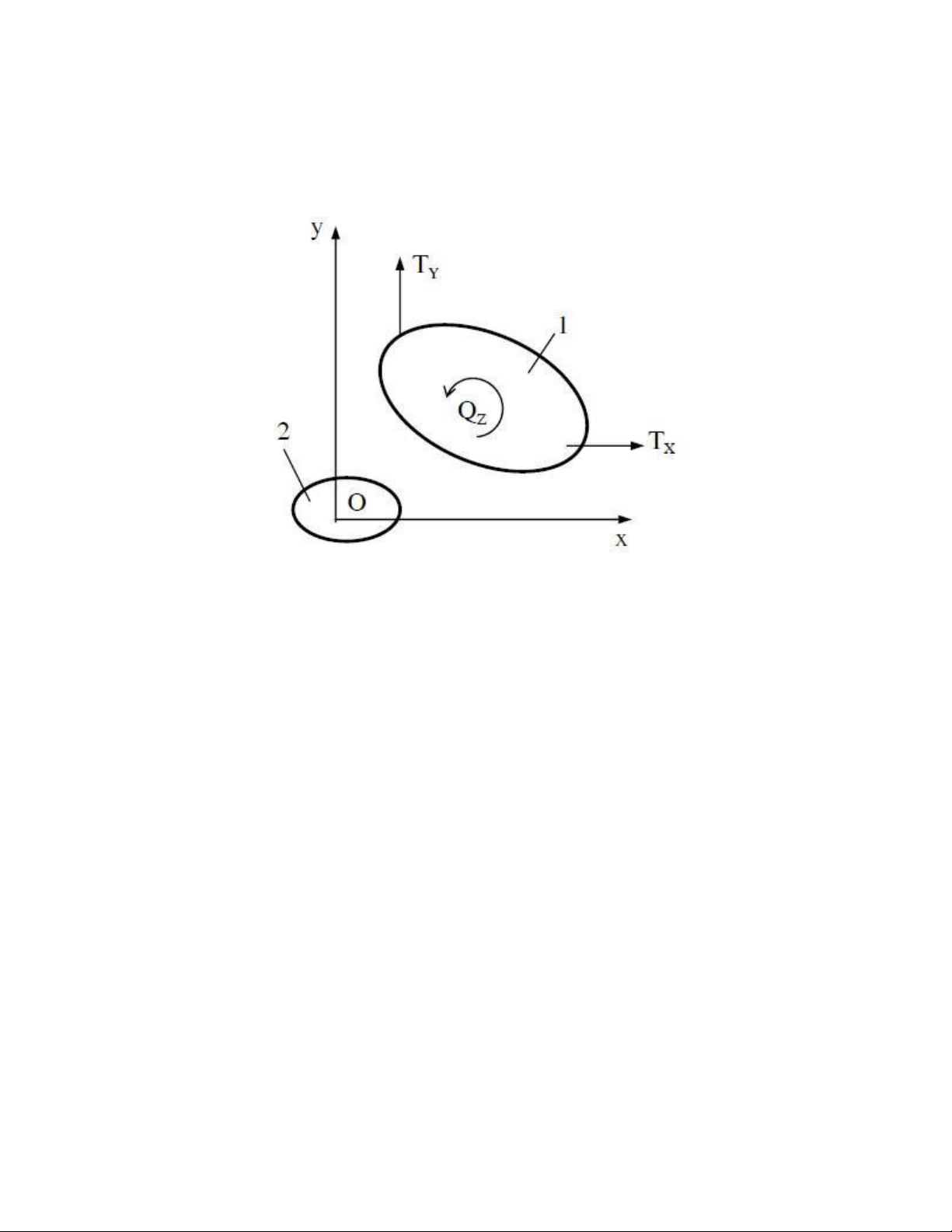
Hình 1.16. Bậc tự do của cơ cấu trong không gian OXYZ
Khi để rời hai khâu trong không gian, giữa chúng sẽ có 6 bậc tự do. Thật vậy, trong hệ tọa
độ vuông góc OXYZ gắn liến với khâu (1), khâu (2) có 6 khả năng chuyển động: TX, TY,
TZ (chuyển động tịnh tiến dọc theo các trục OX, OY, OZ) và QX, QY, QZ (chuyển động
quay quanh các trục OX, OY, OZ). Sáu khả năng này hoàn toàn độc lập với nhau. - Số bậc
tự do tổng cộng của n khâu động là: 6.n - Cơ cấu không gian có 5 loại khớp:
+ Khớp loại 5 (p5) chứa 5 ràng buộc +
Khớp loại 4 (p4) chứa 4 ràng buộc
+ Khớp loại 3 (p3) chứa 3 ràng buộc +
Khớp loại 2 (p2) chứa 2 ràng buộc
+ Khớp loại 1 (p1) chứa 1 ràng buộc
→ Số ràng buộc của tất cả các khớp trong cơ cấu:
- Trong thực tế, số ràng buộc thường nhở hơn giá trị R vì trong cơ cấu tồn tại R0 ràng buộc trùng
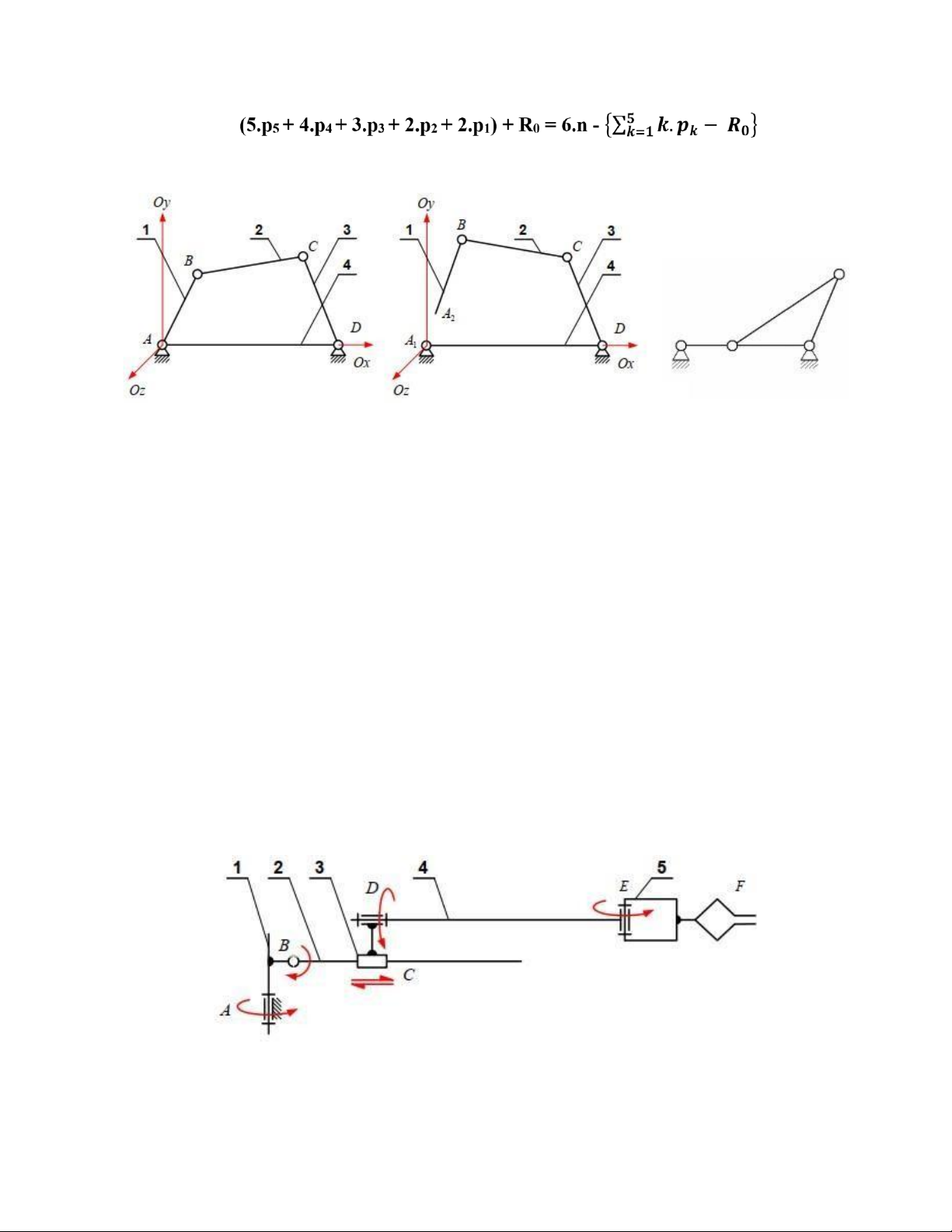
→ Công thức tính bậc tự do của cơ cấu không gian: lOMoAR cPSD| 40551442 W = 6.n – (1.1)
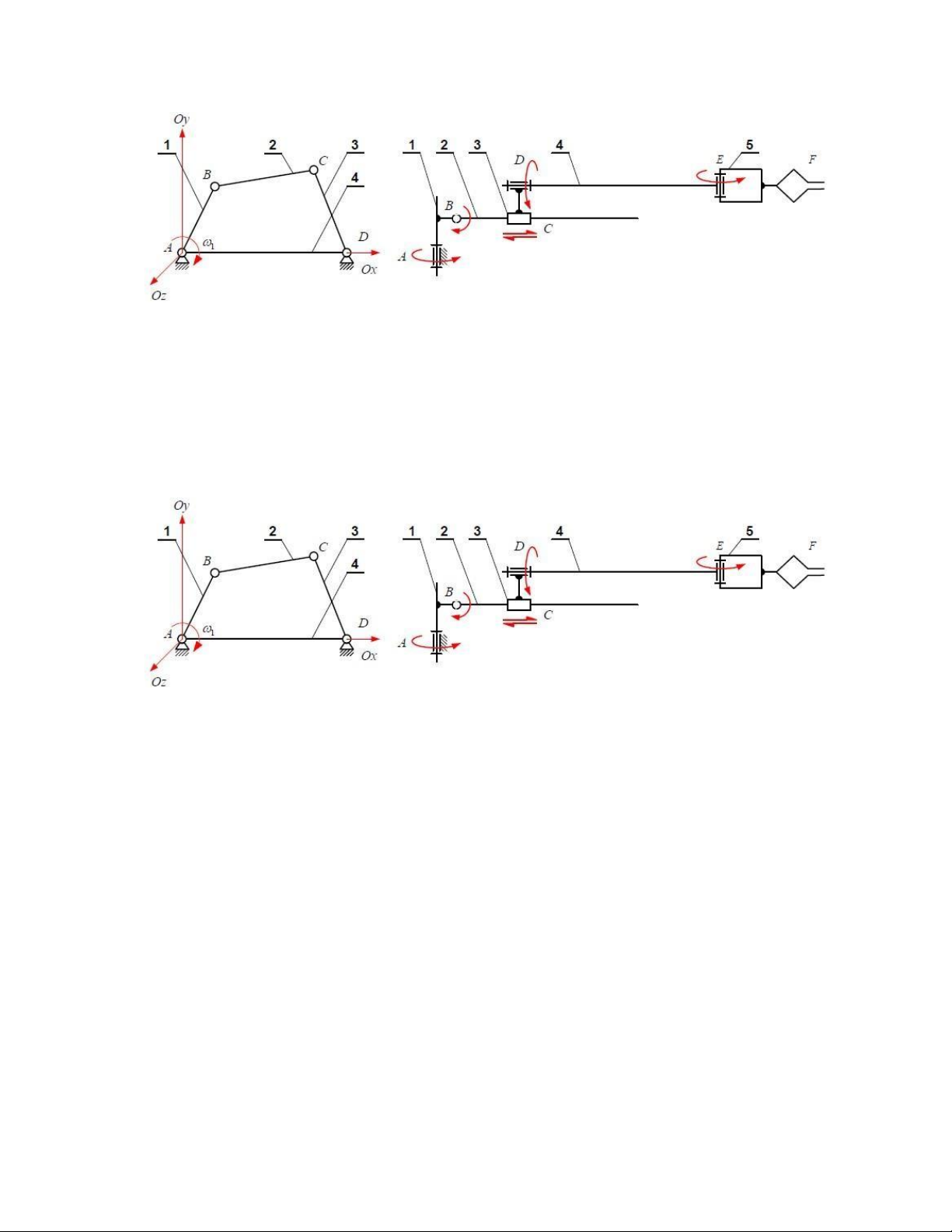
Ví dụ 1: Tính bậc tự do của cơ cấu 4 khâu bản lề như hình:
Hình 1.17. Cơ cấu 4 khâu bản lề
+ Ràng buộc trực tiếp: là ràng buộc giữa 2 khâu do khớp nối trực tiếp giữa 2 khâu đó.
+ Ràng buộc gián tiếp: nếu tháo khớp A, giữa khâu 1 và 4 có ràng buộc gián tiếp: (1) TOZ (2) QOX (3) QOY
+ Ràng buộc trùng: nối khâu 1 và 4 bằng khớp A, giữa chúng có ràng buộc trực tiếp sau:
(1) TOZ (2) QOX (3) QOY (4) TOX (5) TOY
→ 3 ràng buộc trùng (1) TOZ (2) QOX (3) QOY. Ràng buộc trùng R0 chỉ xảy ra ở khớp đóng kín của cơ cấu. + Số khâu động: n = 3
+ Số khớp loại 5: p5 = 4
→ Bậc tự do của cơ cấu: W = 6.3 – (5.4 – 3) = 1
Ví dụ 2: Tính bậc tự do của cơ cấu bàn tay máy như hình:
Hình 1.18. Cơ cấu bàn tay máy + Số khâu động: n = 5 lOMoAR cPSD| 40551442
+ Số khớp loại 5: p5 = 5
→ Bậc tự do của cơ cấu: W = 6.5 – (5.5) = 5
1.2.1. Bậc tự do của cơ cấu phẳng
Hình 1.19. Bậc tự do của cơ cấu trong mặt phẳng OXY
Khi để rời hai khâu trong mặt phẳng, số bậc tự do tương đối giữa chúng chỉ còn lại là 3: Tx, Ty, Qz.
- Số bậc tự do tổng cộng của n khâu động là: 3.n -
Cơ cấu phẳng có 2 loại khớp:
+ Khớp loại 4 (p4) chứa 1 ràng buộc
+ Khớp loại 5 (p5) chứa 2 ràng buộc
→ Công thức tính bậc tự do của cơ cấu phẳng:
W = 3.n – (2.p5 + 1.p4) (1.2)
1.2.3. Bậc tự do thừa của cơ cấu phẳng
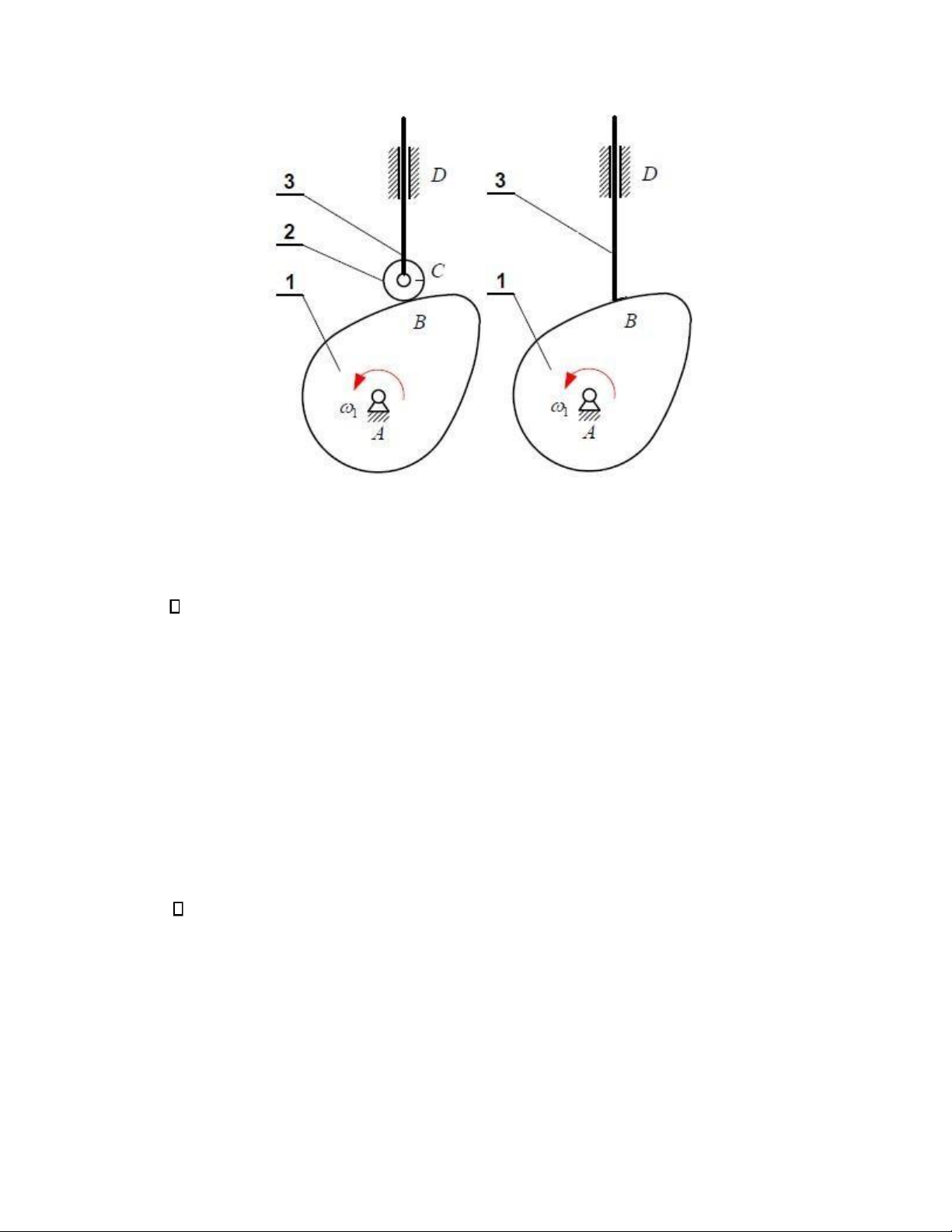
Ví dụ: Hãy tính bậc tự do của cơ cấu cam cần đẩy đáy con lăn như hình vẽ ? lOMoAR cPSD| 40551442
Hình 1.20. Cơ cấu cam cần đẩy đáy con lăn
Công thức tính bậc tự do của cơ cấu phẳng: W = 3.n – (2.p5 + 1.p4)
Trong đó: n = 3, p5 = 3, p4 = 1
W = 3.3 – (2.3 + 1.1) = 2 (kết quả này có đúng không)
Cơ cấu cam cần đẩy đáy con lăn dùng để biến chuyển động quay của cam 1 thành chuyển
động tịnh tiến của khâu 3. Tuy nhiên, bậc tự do của cơ cấu W = 1, ở đây có một bậc tự do
thừa S = 1, đó là chuyển động của con lăn xung quanh trục của mình. Con lăn chính là bậc
tự do thừa, khi bỏ đi cơ cấu vẫn chuyển động được.
Con lăn bổ sung vào đóng vai trò là bậc tự do thừa thế thì nó có ưu điểm gì: khi cam
1 quay dẫn đến con lăn quay do đó ma sát ở đây là ma sát lăn, khi bỏ con lăn đi thì là ma
sát trượt, ma sát lăn làm việc êm hơn, lâu mòn hơn, trong thời gian làm việc theo quy định
con lăn mòn ta sẽ tháo thay con lăn khác dễ dàng hơn. Trong cơ cấu cam trên máy chúng ta
thường thấy đầu cần có con lăn.
Vậy công thức tính bậc tự do của cơ cấu phẳng khi có bậc tự do thừa:
W = 3.n – (2.p5 + 1.p4) – S (1.3)
1.2.4. Ràng buộc thừa
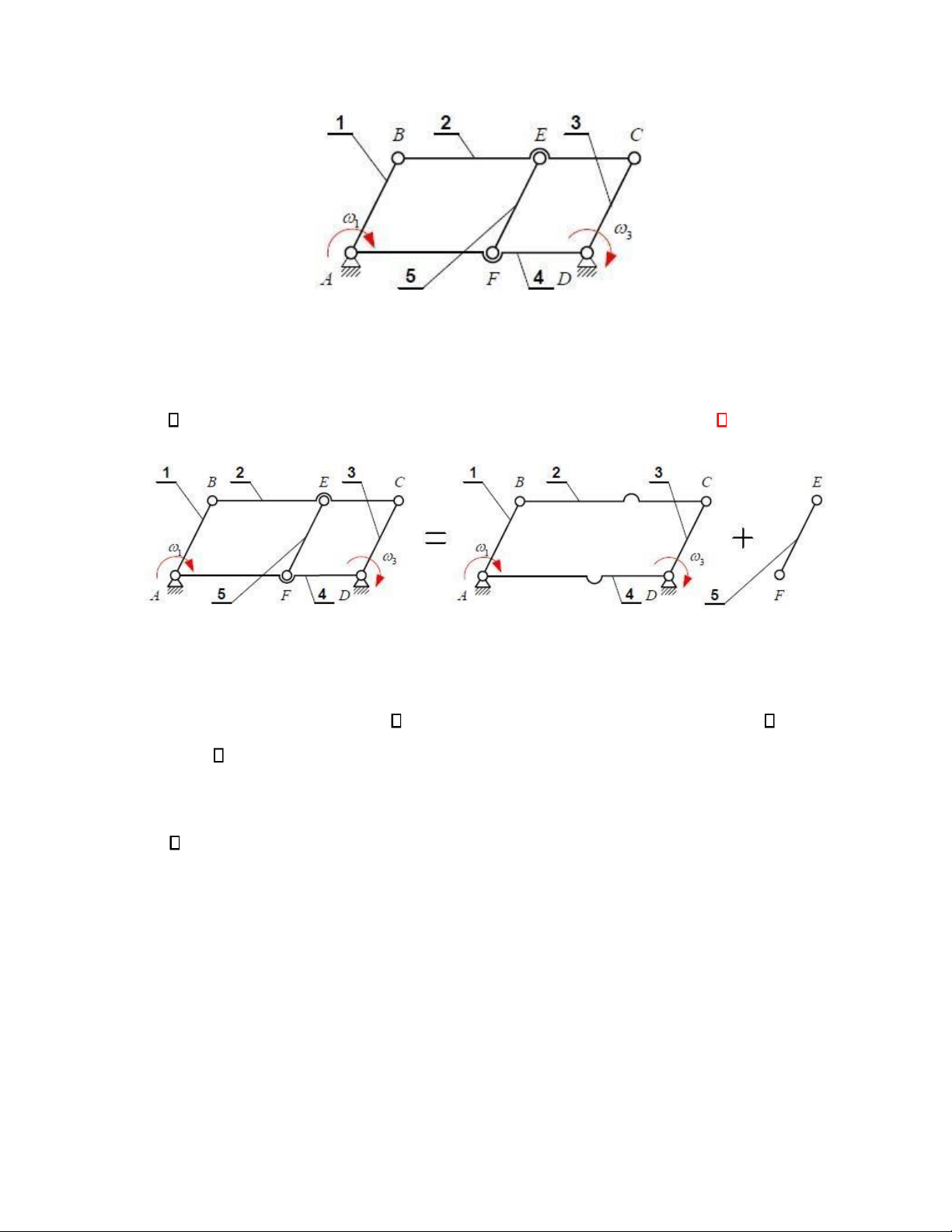
Ví dụ: Hãy tính bậc tự do của hình bình hành như hình vẽ: lOMoAR cPSD| 40551442
Hình 1.21. Cơ cấu hình bình hành
Công thức tính bậc tự do của cơ cấu phẳng: W = 3.n – (2.p5+1.p4)
Trong đó: n = 4, p5 = 6, p4 = 0
W = 4.3 – (2.6 + 1.0) = 0 (Trên thực tế cơ cấu này làm việc được điều này có gì mâu thuẫn không ?)
Hình 1.22. Phân tách cơ cấu hình bình hành
Chú ý khâu 5 không có tác dụng gì trong chuyển động của cơ cấu ABCD. Nếu bỏ
khâu 5 ra, cơ cấu trở thành cơ cấu 4 khâu bản lề với bậc tự do = 1. Khi thêm khâu 5 và 2
khớp E, F vào: Thêm khâu 5 (EF) thêm 3 bậc tự do, thêm 2 khớp loại 5 (E, F) thêm 4
ràng buộc thêm 1 ràng buộc.
Gọi r là số ràng buộc thừa có trong cơ cấu.
Vậy công thức tính bậc tự do của cơ cấu phẳng khi có ràng buộc thừa:
W = 3.n – (2.p5 + 1.p4) + r (1.4)
Vậy cơ cấu hình bình hành ở trên có W = 3.4 – (2.6) + 1 = 1
Ràng buộc thừa là khâu 5 có 2 khớp quay ở 2 đầu, ta có thể bỏ đi được, nhưng thêm
ràng buộc thừa sẽ tăng cứng, tăng độc bền cho cơ cấu. Ràng buộc thừa không có dấu hiệu
rõ ràng như bậc tự do thừa, nó đa dạng phong phú nhưng phức tạp hơn. 1.2.5. Các ví dụ
Ví dụ 1. Hãy tính bậc tự do của cấu máy dập cơ khí như hình: lOMoAR cPSD| 40551442
Hình 1.23. Cơ cấu máy dập cơ khí
Công thức tính bậc tự do của cơ cấu phẳng: W = 3.n – (2.p5 + 1.p4)
Trong đó: n = 5, p5 = 7, p4 = 0 → W = 3.5 – (2.7 + 1.0) = 1
Chú ý: Tại khớp quay có k khâu nối với nhau, thì số khớp quay được tính là k-1
Ví dụ 2. Hãy tính bậc tự do của cơ cấu phẳng (cơ cấu cắt tự động trong nhà máy sản xuất bánh kẹo) như hình:
Hình 1.24. Cơ cấu cắt tự động trong nhà máy sản xuất bánh kẹo Công
thức tính bậc tự do của cơ cấu phẳng khi có bậc tự do thừa: W = 3.n – (2.p5 + 1.p4) - S
Trong đó: n = 7, p5 = 9, p4 = 1, S = 1 → W = 3.7 – (2.9 + 1.1) - 1 = 1 Ví dụ
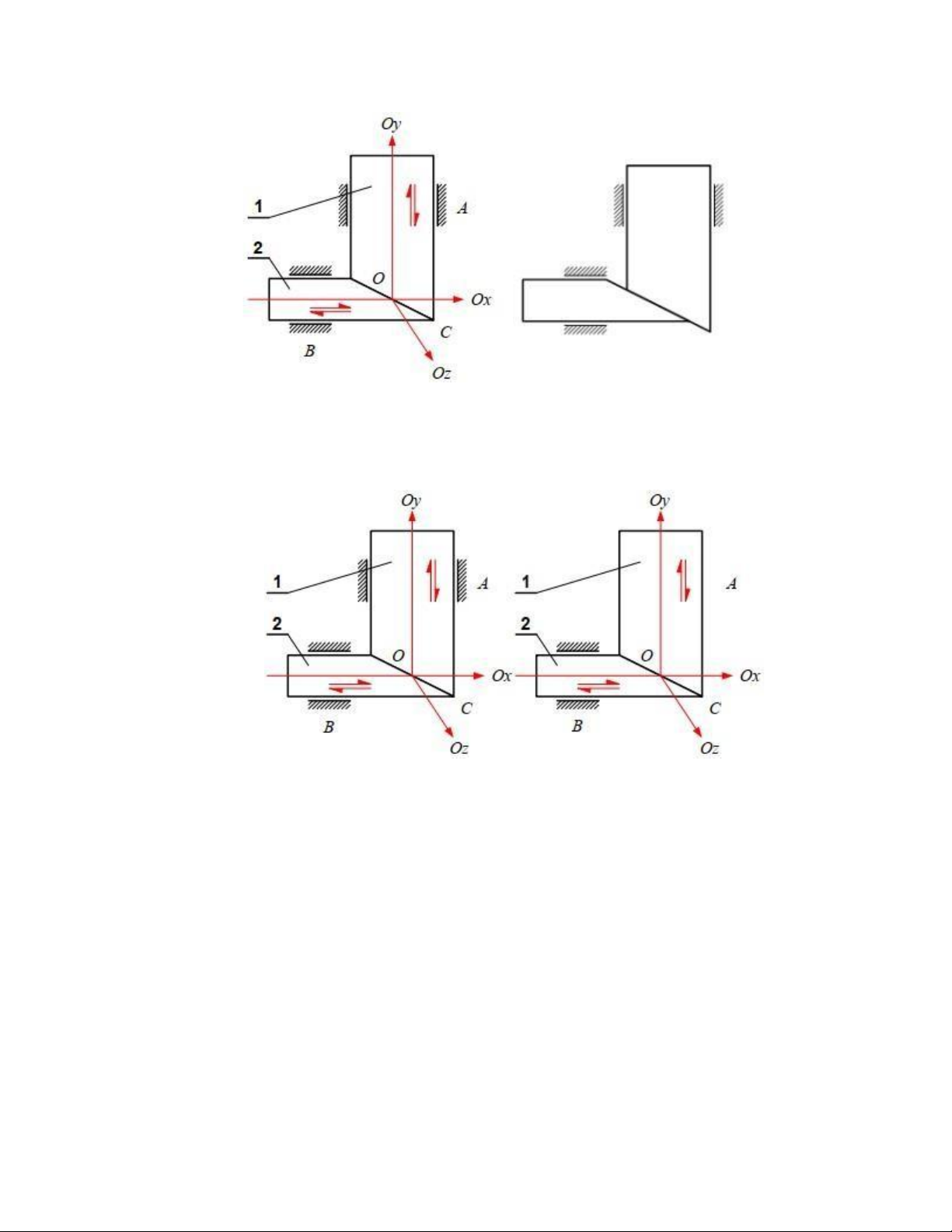
3: Hãy tính bậc tự do của cơ cấu chêm như hình: lOMoAR cPSD| 40551442 Hình 1.25. Cơ cấu chêm
+ Cơ cấu có: n = 2, p5 = 3
+ Chọn hệ quy chiếu 0XYZ gắn với giá như hình:
→ Khi chưa đóng khớp A, khâu 1 có khả năng: (1) TOX (2) TOY (3) QOZ
→ Khi đóng khớp A, khâu 1 có khả năng: (2) TOY
→ W = 3.2 – (2.3) + 1 = 1
- Ý nghĩa của bậc tự do:
→ Biểu diễn số chuyển động độc lập của cơ cấu đó
→ Bậc tự do là bao nhiêu thì cơ cấu có đó có bấy nhiêu khâu dẫn, số động cơ cần thiết để dẫn động cơ cấu.
→ Đối với cơ cấu phẳng trừ cơ cấu chêm: W = 3.n – (2.p5 + 1.p4 – r) – S (1.5)
1.3. Xếp loại cơ cấu lOMoAR cPSD| 40551442
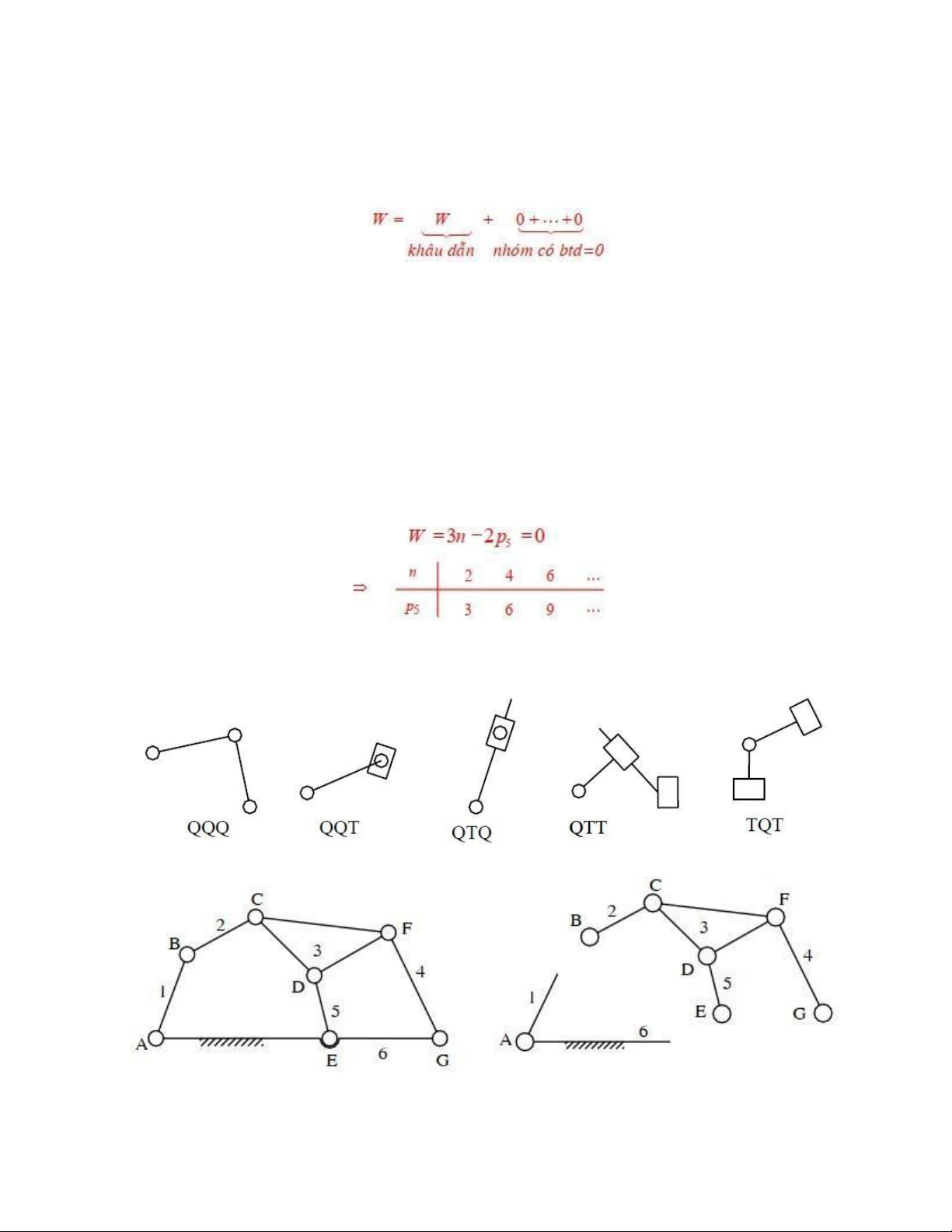
1.3.1. Nguyên lý tạo thành cơ cấu
Một cơ cấu có W bậc tự do là cơ cấu được tạo thành bởi W khâu dẫn và những nhóm có
bậc tự do bằng không : W = W + 0 + ... + 0 (1.6)
Nắm chắc nguyên lý tạo thành cơ cấu chúng ta có thế sáng tạo ra các cơ cấu mới, các bài
tập đều tuân theo nguyên lý này.
1.3.2. Nhóm tĩnh định (nhóm Atxua)
- Là một chuỗi động có 2 đặc điểm sau: + Bậc tự do bằng W = 0
+ Phải tối giản (tức là không thể chia thành những nhóm nhở hơn được nữa) - Đối
với nhóm tĩnh định toàn khớp thấp:
1.3.3. Phân loại nhóm Atxua
- Nhóm atxua hạng 2: có 2 khâu và 3 khớp loại 5
Có 5 loại nhóm atxua hạng 2:
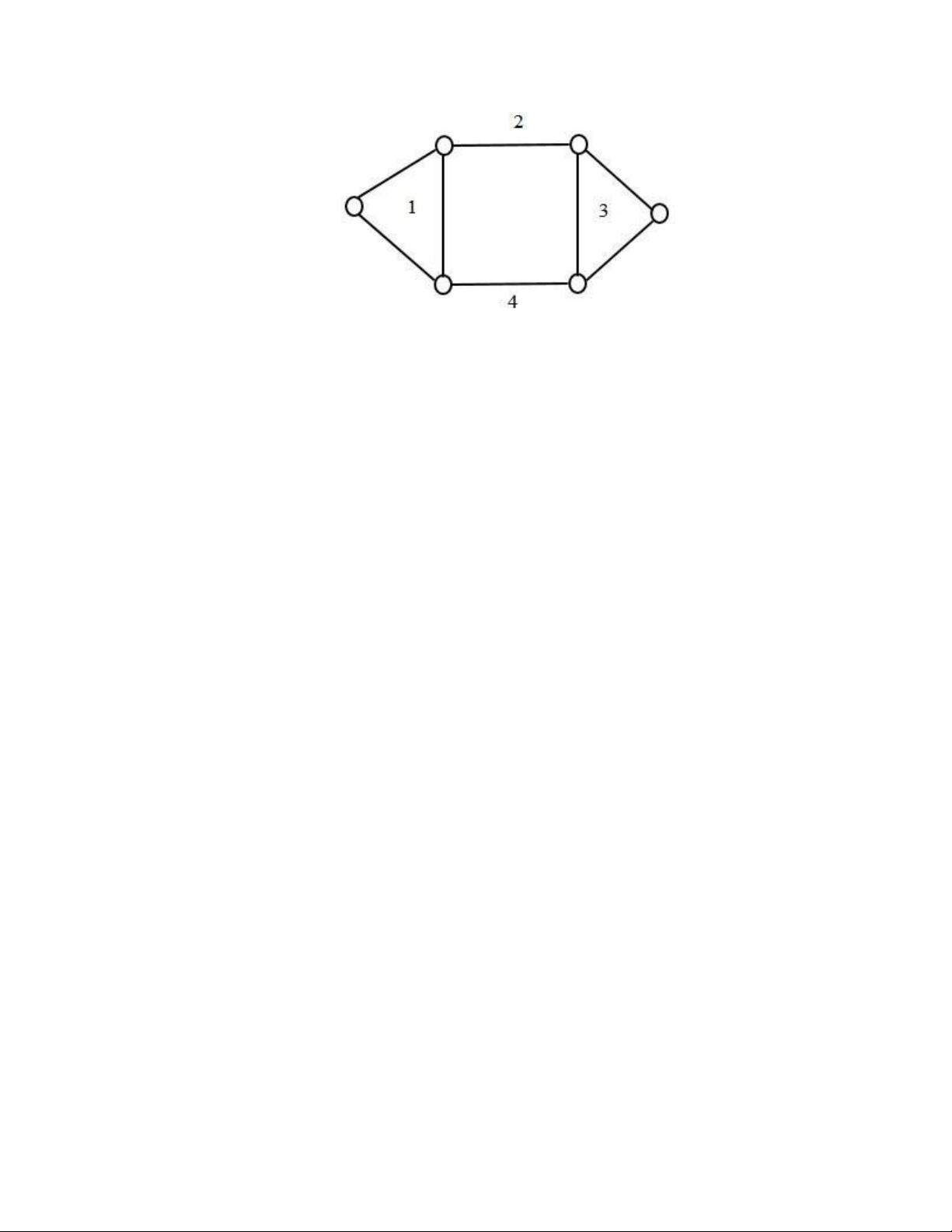
- Nhóm atxua hạng 3: Có 4 khâu động + 6 khớp loại 5
- Nhóm atxua hạng 4: Có 4 khâu động + 6 khớp loại 5 lOMoAR cPSD| 40551442 - Khâu dẫn là loại 1.
1.3.4. Xếp loại cơ cấu
Loại của cơ cấu là loại của nhóm atxua cao nhất có trong cơ cấu đó -
Cơ cấu loại 1 là cơ cấu có một khâu động nối với giá bằng khớp quay, ví dụ cơ cấu roto máy điện -
Cơ cấu có số khâu động lớn hơn 1 có thể coi là tổ hợp của một hay nhiều cơ
cấu loại 1 với một số nhóm Atxua.
1.3.5. Các nguyên tắc tách nhóm Atxua
- Khi tách nhóm tĩnh định phải theo nguyên tắc sau:
+ Chọn trước khâu dẫn và giá
+ Sau khi tách nhóm, phần còn lại phải là 1 cơ cấu hoàn chỉnh hoặc khâu dẫn
+ Tách những nhóm ở xa khâu dẫn trước rồi dần đến những nhóm ở gần hơn +
Khi tách nhóm, thử tách những nhóm đơn giản trước, nhóm phức tạp sau.
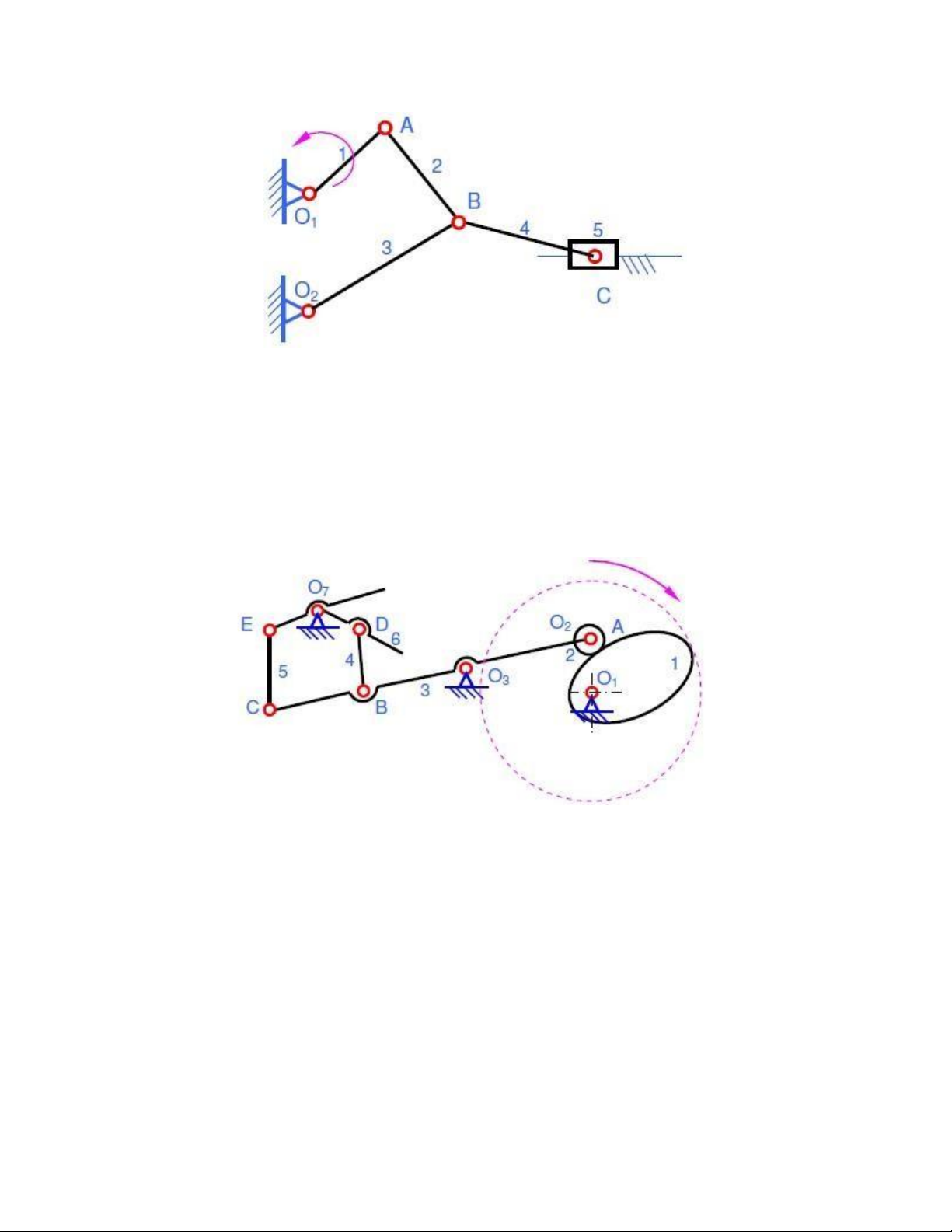
- Ví dụ 1: Tách nhóm tĩnh định của cơ cấu động cơ diezen: lOMoAR cPSD| 40551442
Hình 1.26. Cơ cấu động cơ diezen
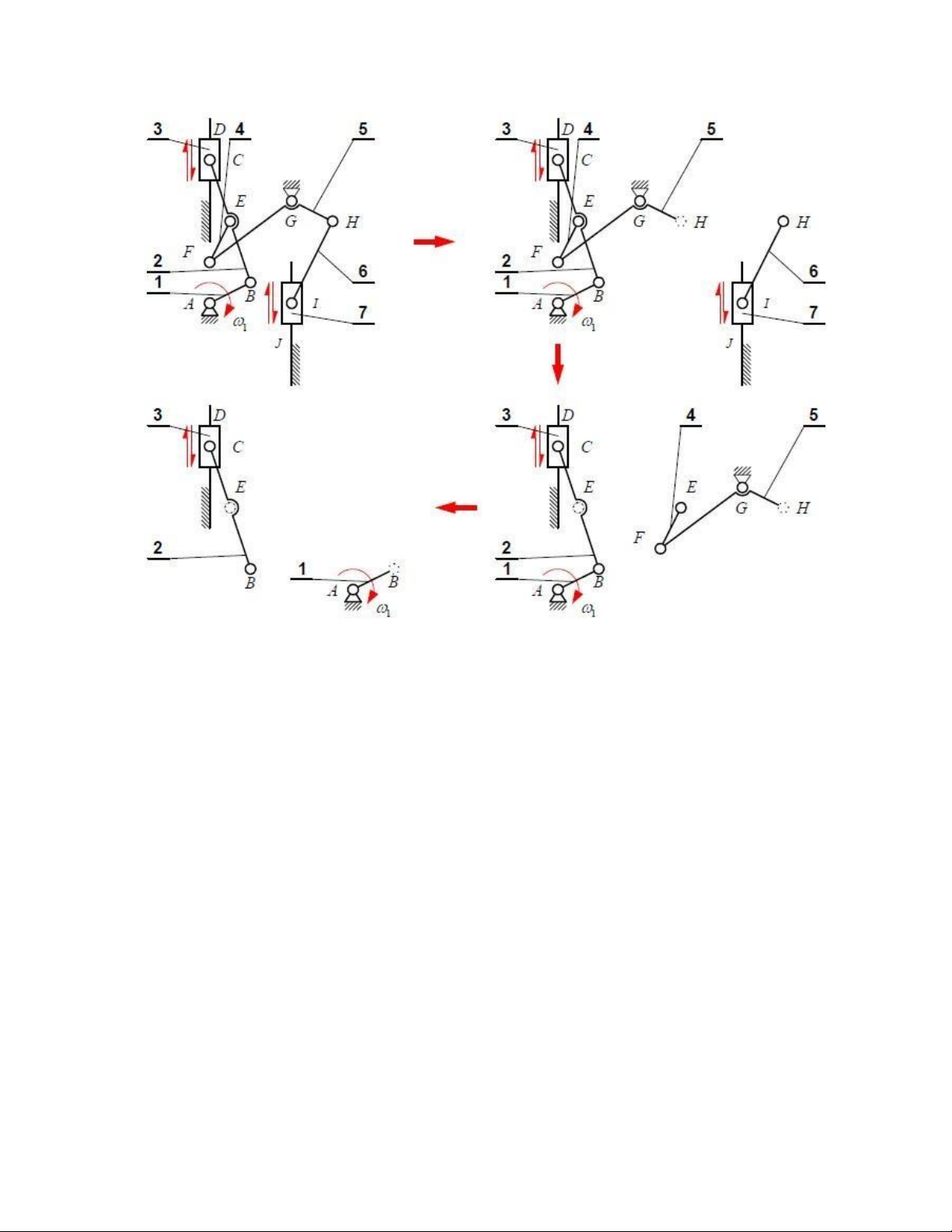
- Ví dụ 2: Tách nhóm tĩnh định của cơ cấu bơm ô xy:



