Thiết kế Bộ Điều Khiển PID cho Động cơ DC Servo | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Động cơ DC Servo là một loại động cơ DC được tích hợp với các thành phần điều khiển, giúp duy trì hoặc điều chỉnh vị trí, tốc độ và mô-men xoắn một cách chính xác. Tài liệu được sưu tầm gồm 11 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: công nghệ kỹ thuật cơ điện tử 11 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:






Preview text:
lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT THÀNH PHỐ HỒ CHÍ MINH
KHOA CƠ KHÍ CHẾ TẠO MÁY
BÁO CÁO ĐỒ ÁN CƠ ĐIỆN TỬ
ĐỀ TÀI: THIẾT KẾ BỘ ĐIỀU KHIỂN VỊ TRÍ
VÀ VẬN TỐC CHO ĐỘNG CƠ SERVO GVHD
: ThS. Tưởng Phước Thọ SVTH
: Nguyễn Phước Dũng MSSV : 21146444 Năm học: 2024 – 2025 1 lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM
NHẬN XÉT CỦA GIẢNG VIÊN
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
.......................................................................................................................
....................................................................................................................... Ngày… tháng… năm 2024. Giảng viên hướng dẫn. Ths. Tưởng Phước Thọ LỜI CẢM ƠN
Em xin gửi lời cảm ơn chân thành và sâu sắc nhất đến thầy Tưởng Phước Thọ,
người đã tận tình hướng dẫn, chỉ bảo và đồng hành cùng em trong quá trình thực
hiện đồ án cơ điện tử.
Thầy không chỉ truyền đạt kiến thức chuyên môn một cách tận tình mà còn
giúp em rèn luyện tư duy logic, kỹ năng giải quyết vấn đề và tinh thần trách nhiệm
trong công việc. Những lời khuyên quý báu của Thầy đã giúp em hoàn thành đồ án lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM
một cách tốt nhất và tích lũy được nhiều kinh nghiệm quý giá cho con đường học
tập và sự nghiệp sau này.
Sự tận tâm, nhiệt huyết của Thầy là nguồn cảm hứng lớn để em nỗ lực và phát
triển hơn nữa. Em xin trân trọng cảm ơn Thầy và chúc Thầy luôn mạnh khỏe, hạnh
phúc và tiếp tục gặt hái nhiều thành công trong sự nghiệp giảng dạy. lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM TÓM TẮT lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM DANH MỤC HÌNH ẢNH lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM
CHƯƠNG 1: TỔNG QUAN VÀ CƠ SỞ LÝ THUYẾT. 1.1. Tổng quan.
1.1.1 Tổng quan về động cơ DC Servo.
Động cơ DC Servo là một loại động cơ DC được tích hợp với các thành phần điều khiển,
giúp duy trì hoặc điều chỉnh vị trí, tốc độ và mô-men xoắn một cách chính xác. Khác với động
cơ DC thông thường, động cơ DC Servo hoạt động trong hệ thống phản hồi khép kín, nơi mà
tín hiệu đầu ra được so sánh với tín hiệu đầu vào mong muốn để điều chỉnh liên tục.
1.1.2 Tổng quan về bộ điều khiển DC Servo. a. Phần cứng:
- Vi điều khiển: Vi điều khiển trong bộ điều khiển Servo đóng vai trò quan trọng
trong việc xử lý tín hiệu và điều khiển hoạt động của động cơ Servo. Nó nhận tín
hiệu đầu vào từ cảm biến phản hồi và tín hiệu yêu cầu từ hệ thống điều khiển, sau
đó xử lý và tính toán sai lệch. Vi điều khiển sử dụng các thuật toán điều khiển như
PID để điều chỉnh tín hiệu đầu ra, giúp động cơ đạt được các thông số mong muốn
về vị trí, tốc độ và mô-men xoắn. Nó cũng giúp giao tiếp với các thiết bị bên ngoài
qua giao diện truyền thông.
- Mạch công suất: Mạch công suất trong bộ điều khiển Servo có vai trò trong việc
khuếch đại tín hiệu điều khiển từ vi điều khiển và cung cấp nguồn điện cho động
cơ. Mạch công suất chuyển đổi tín hiệu điều khiển thành dòng điện hoặc điện áp
cần thiết để động cơ hoạt động, điều chỉnh tốc độ và mô-men xoắn. Nó sử dụng các
thành phần như MOSFET, IGBT để điều khiển nguồn cung cấp điện cho động cơ.
Mạch công suất cũng giúp bảo vệ hệ thống khỏi các sự cố quá tải, quá dòng và ngắn mạch. b. Thuật toán.
- Thuật toán PID: Thuật toán PID (Proportional-Integral-Derivative) trong bộ điều
khiển Servo có vai trò trong việc điều chỉnh các thông số như vị trí, tốc độ và
mômen xoắn của động cơ. Thuật toán này sử dụng ba yếu tố: tỷ lệ (P), tích phân (I) và
vi phân (D) để tính toán tín hiệu điều khiển. Phần tỷ lệ giúp giảm sai lệch nhanh
chóng, phần tích phân loại bỏ sai lệch dài hạn, và phần vi phân giúp giảm độ rung,
ổn định hệ thống. PID giúp cải thiện độ chính xác và ổn định cho động cơ Servo,
đảm bảo hoạt động mượt mà và hiệu quả. lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM 1.2 Mục tiêu.
Mục tiêu của đề tài “Thiết kế bộ điều khiển PID cho động cơ DC Servo” là hiểu
hơn về động cơ dc servo, cách tính toán, lựa chọn các thiết bị cần thiết và có thể
thiết kế bộ điều khiển PID cho động cơ. Đây là bước đệm qua trọng trong việc thiết
kế và điều khiển các hệ thống khác như robot, máy CNC, băng tải,… để ứng dụng
trong thực tế và trong đồ án tốt nghiệp chuyên ngành cơ điện tử.
1.3 Nội dung thực hiện.
- Nghiên cứu lý thuyết động cơ DC Servo, encoder, mạch công suất.
- Thiết kế mạch PCB công suất.
- Thiết kế bộ PID điều khiển DC Servo.
- Phân tích động học, hàm truyền hệ thống.
- Mô phỏng qua phần mềm matlab.
- Viết báo cáo về kết quả.
1.4 Giới hạn nghiên cứu.
1.5 Phương pháp nghiên cứu.
Đề tài là kết hợp nghiên cứu giữa phương pháp lý thuyết và thực nghiệm trên mô
hình thực tế. Cụ thể:
- Phương pháp lý thuyết: tìm kiếm, tổng hợp các tài liệu liên quan, tính toán thiết kế
dựa trên các thông số đầu vào có sẵn, xây dựng giao diện và chương trình điều khiển.
- Phương pháp thực nghiệm trên mô hình: từ trên mô hình thực tế, chạy thử kiểm
nghiệm lại lý thuyết và điều chỉnh lại một vài thông số cho phù hợp, từ đó tạo
ra một sản phẩm máy phay hoàn thiện.
1.6 Cơ sở lý thuyết.
1.6.1 Truyền động vít – đai ốc.
Truyền động vít – đai ốc được dùng để biến chuyển động quay thành chuyển động
tịnh tiến. Tùy theo ma sát trên ren người ta phân ra truyền động vít – đai ốc ma sát lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM
trượt gọi tắt là truyền động trượt và truyền động vít – đai ốc ma sát lăn gọi tắt là truyền động lăn.
Trong đó, truyền động vít – đai ốc ma sát lăn được dùng nhiều trong các cơ cấu di
chuyển chính xác, cơ cấu định lượng và điều chỉnh… Thường dùng nhất là truyền
động vít – đai ốc bi, cụ thể các viên bi nằm trong các rãnh xoắn của vít và đai ốc.
Và ưu điểm lớn nhất của truyền động này là ít mòn, có hiệu suất và tuổi thọ cao
1.6.2 Động cơ Servo. a. Giới thiệu.
Động cơ Servo là một động cơ điện có khả năng điều khiển vòng kín, cho phép điều
chỉnh chính xác các thông số như vị trí, tốc độ và mô-men xoắn. Đặc trưng của động
cơ Servo là sự kết hợp giữa động cơ điện (thường là động cơ DC hoặc động cơ AC)
và một bộ phản hồi (feedback system) để điều khiển các tham số của động cơ.
b. Có hai loại động cơ Servo phổ biến:
- Động cơ Servo DC: Động cơ sử dụng nguồn điện một chiều (DC), thường được sử
dụng trong các hệ thống yêu cầu điều khiển vị trí hoặc tốc độ đơn giản.
- Động cơ Servo AC: Động cơ sử dụng nguồn điện xoay chiều (AC), thường dùng
trong các ứng dụng yêu cầu công suất lớn hoặc điều khiển chính xác hơn.
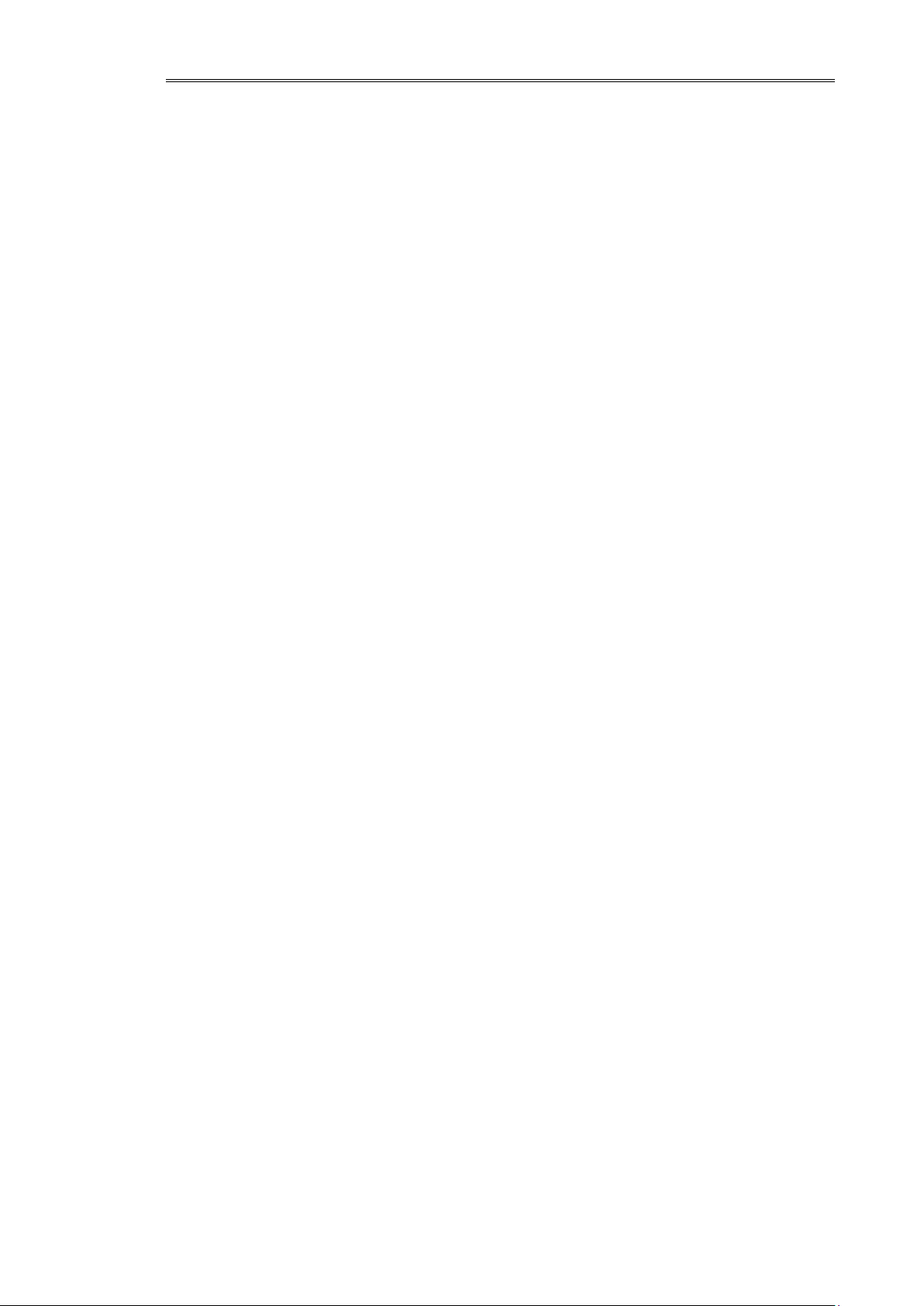
c. Cấu tạo động cơ servo bao gồm:
- Stator : phần quay thường sử dụng những nam châm vĩnh cửu có lực hút rất lớn bọc quanh trục lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM
- Rotor : phần tĩnh là tập hợp những vòng dây được gắn cố định trên lớp vỏ
- Encoder - bộ mã hóa thành phần này đảm nhận nhiệm vụ ghi nhận - chuyển đổi tín
hiệu quay của rotor thành các dạng tín hiệu khác phục vụ cho việc giám sát và điều khiển.
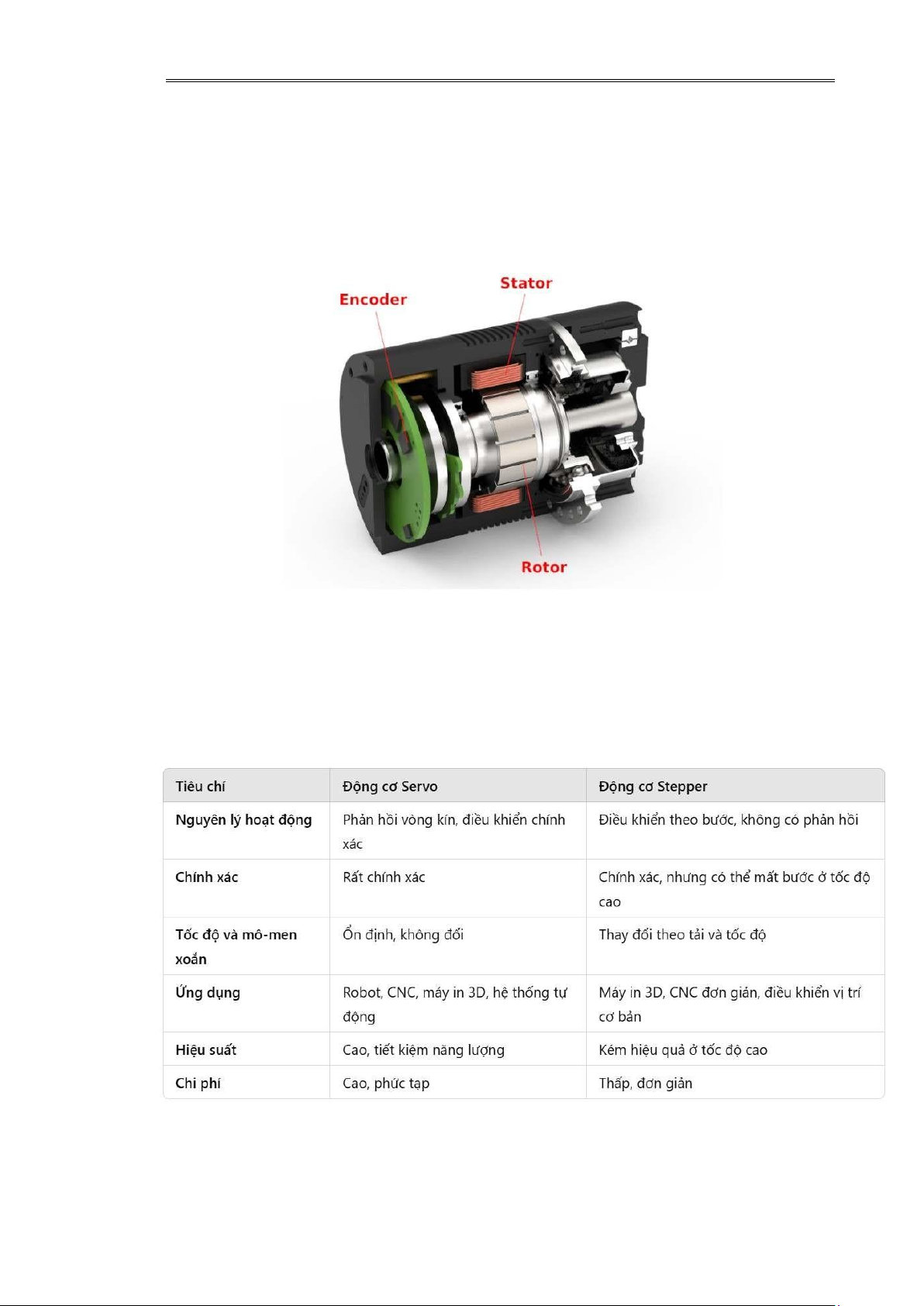
d. So sánh động cơ Servo và Step Motor.
Động cơ servo và động cơ bước là hai loại động cơ thông dụng dùng để điều khiển
góc quay trong những ứng dụng đòi hỏi độ chính xác cao, tuy nhiên chúng cũng có
nhiều điểm khác biệt và được liệt kê trong bảng sau.
1.6.3 Vi điều khiển.
Trong đồ án này, em sử dụng vi điều khiển STM32 để điều khiển động cơ DC Servo. lOMoAR cPSD| 58675420 TRÍ TUỆ NHÂN TẠO
TRƯỜNG ĐH SPKT TP.HCM
STM32 là một dòng vi điều khiển (microcontroller) 32-bit được phát triển bởi
STMicroelectronics. Dòng vi điều khiển này được sử dụng rộng rãi trong các ứng dụng từ
nhúng, điều khiển tự động, đến các thiết bị di động và IoT. STM32 sử dụng kiến trúc ARM
Cortex-M, với nhiều dòng vi điều khiển khác nhau phục vụ cho các ứng dụng có yêu cầu về
hiệu suất và tính năng khác nhau.
Tài liệu liên quan:
-

Tin học trong kỹ thuật
40 20 -

Fuzzy PID Control of a Five DOF Robot Arm: A Comprehensive Study | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
125 63 -

Improved Geometric Algorithm for Indoor Localization | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
116 58 -

Ứng dụng cảm biến khoảng cách lên mô hình ô tô đo đạc khoảng cách cảnh báo va chạm | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
97 49 -

Thực Tập: Trạm Đóng Nắp Tự Động Hóa | Môn Công nghệ kỹ thuật cơ điện tử - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
89 45