Thuật toán điều khiển PID - Bài tập Cơ Nhiệt | Trường Đại học Khánh Hòa
Thuật toán điều khiển PID - Bài tập Cơ Nhiệt | Trường Đại học Khánh Hòa được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn sinh viên cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Bài tập Cơ Nhiệt (BTCN2021) 14 tài liệu
Trường: Trường Đại học Khánh Hòa 418 tài liệu
Tác giả:
Preview text:
Thuật toán điều khiển PID
Bộ điều khiển PID (A proportional integral derivative controller) là bộ điều khiển
sử dụng kỹ thuật điều khiển theo vòng lặp có hồi tiếp được sử dụng rộng rãi trong
các hệ thống điều khiển tự động. Một bộ điều khiển PID cố gắng hiệu chỉnh sai
lệch giữa tín hiệu ngõ ra và ngõ vào sau đó đưa ra một tín hiệu điều khiển để điều
chỉnh quá trình cho phù hợp.
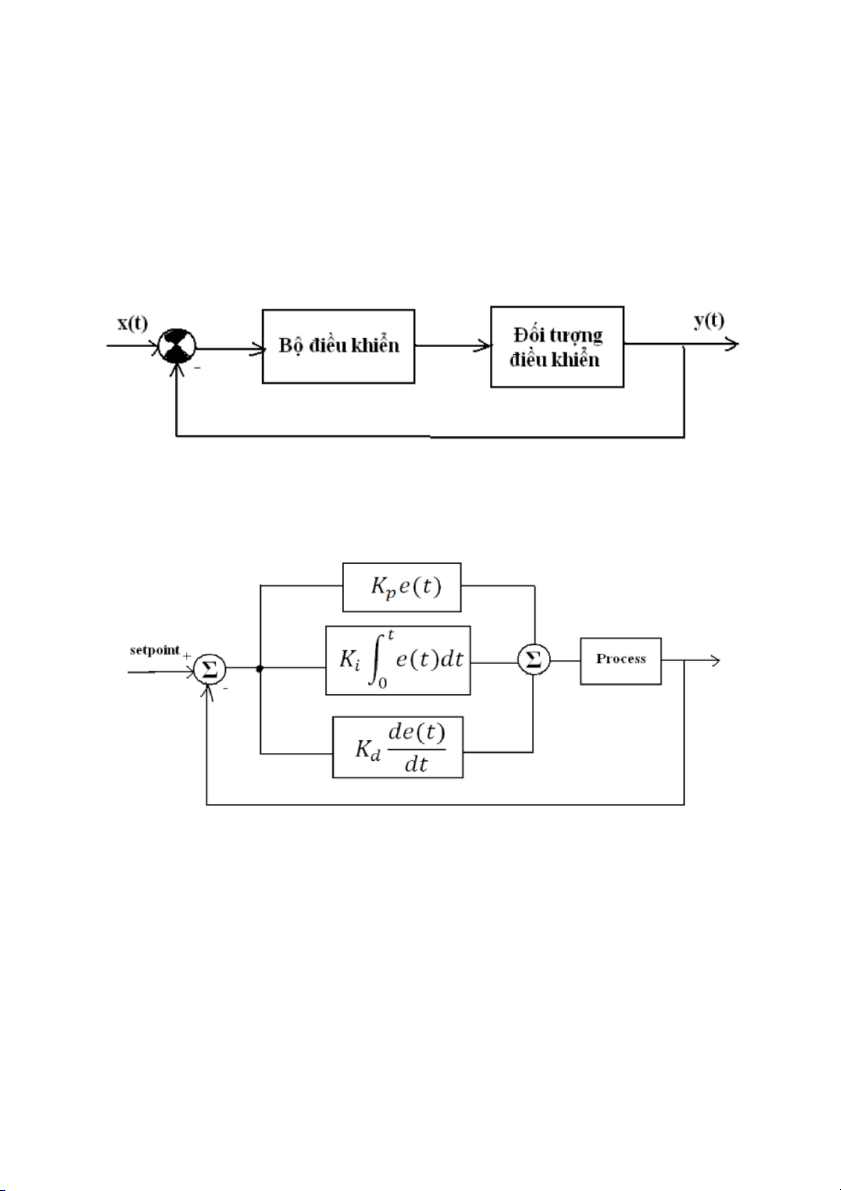
Chúng ta coi hệ thống được thiết kế hồi tiếp âm đơn vị có sơ đồ khối như sau:
Sơ đồ khối hệ thống điều khiển vòng kín
Bộ điều khiển PID gồm 3 thông số riêng: Tỷ lệ, Tích phân và Vi phân.
Thành phần tỉ lệ (Kp) có tác dụng làm tăng tốc độ đáp ứng của hệ, chứ không triệt
tiêu sai số xác lạp của hệ. Thành phần tích phân (Ki) có tác dụng triệt tiêu sai số
xác lập nhưng có thể làm giảm tốc độ đáp ứng của hệ. Thành phần vi phân (Kd)
làm tăng độ ổn định hệ thống, giảm độ vọt lố và cải thiện tốc độ đáp ứng của hệ.
Như vậy, từ ba thành phần (tỉ lệ, tích phân, vi phân), có thể xây dựng thêm các bộ
điều khiển khác như bộ điều khiển P, bộ điều khiển PI, bộ điều khiển PD, tùy vào
đối tượng tác động cụ thể mà ta sử dụng các bộ điều khiển cho thích hợp. ở đây chỉ
nghiên cứu sâu về bộ điều khiển PID.
Lưu ý rằng quan hệ này không phải chính xác tuyệt đối vì Kp, Ki và Kd còn phụ
thuộc vào nhau. Trên thực tế, thay đổi một thành phần có thể ảnh hưởng đến hai thành phần còn lại.
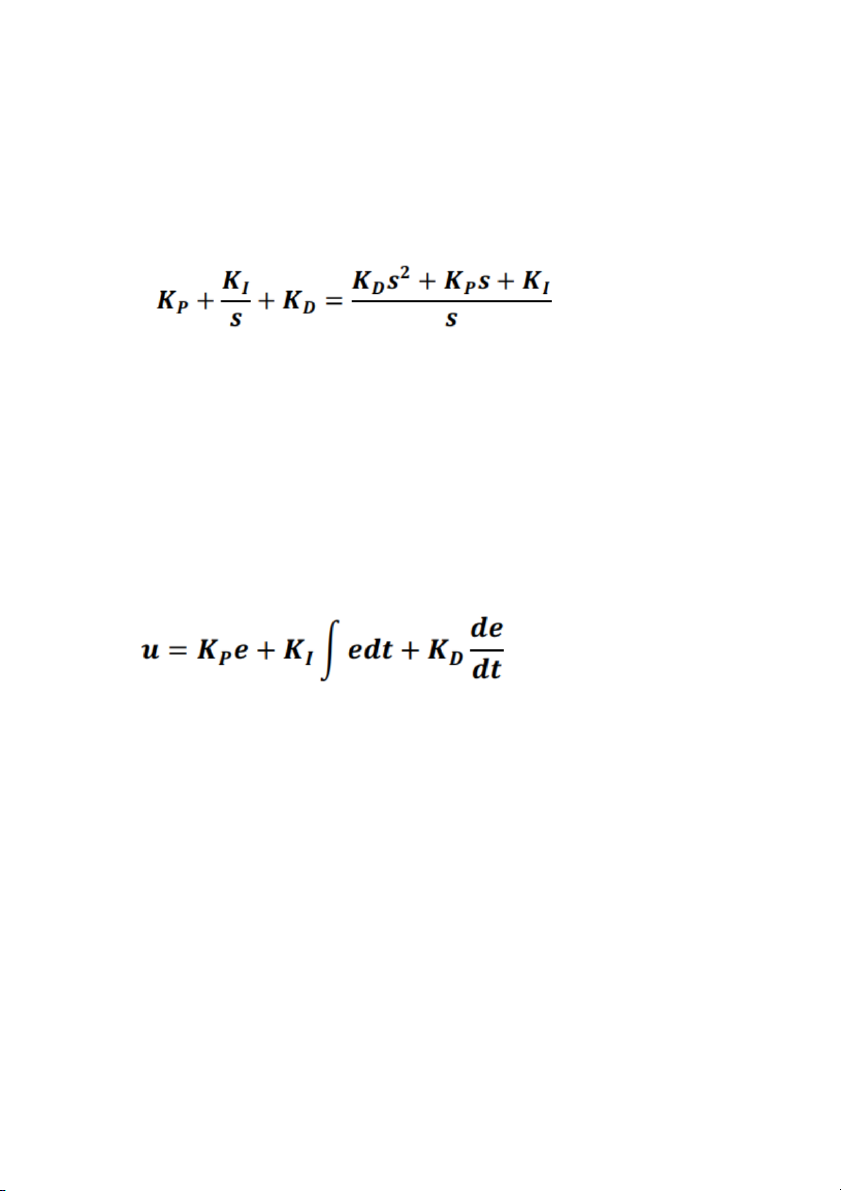
Hàm truyền của bộ điều khiển PID có dạng: Trong đó: Kp = hệ số tỉ lệ; Ki = hệ số tích phân; Kd = hệ số vi phân;
Trước hết ta khảo sát bộ PID làm việc thế nào trong hệ kín có sơ đồ khối như trên.
Biến e là thành phần sai lệch, là hiệu giữa giá trị tín hiệu vào mong muốn và tín
hiệu ra thực tế. Tín hiệu sai lệch (e) sẽ đưa tới bộ PID, và bộ điều khiển tính toán
cả thành phần tích phân lẫn vi phân của (e). Tín hiệu ra (u) của bộ điều khiển bằng:
Lúc này đối tượng điều khiển có tín hiệu vào là (u), và tín hiệu ra la (Y). (Y) được
hồi tiếp về bằng các cảm biến để tiếp tục tính sai lệch (e). Và bộ điều khiển lại tiếp tục như trên.
Khi thiết kế bộ PID nên theo các bước sau để có kết quả như mong muốn:
+ Tìm đáp ứng hệ hở và xác định thông số nào cần cải thiện.
+ Thêm thành phần Kp để cải thiện thời gian đáp ứng.
+ Thêm thành phần Kd để giảm độ vọt lố.
+ Thêm thành phần Ki để triệt tiêu sai số xác lập.
+ Điều chỉnh Kp, Ki, Kd cho đến khi đáp ứng các thông số yêu cầu.
Thường xuyên tham khảo bảng phân tích phía trên để biết đặc tính các thành phần
trong bộ điều khiển. Các thành phần Kp, Ki, Kd vào hệ đơn nếu không cần thiết.
Ví dụ, nếu bộ PI đủ đáp ứng yêu cầu thì không cần thêm vào thành phần vi phân
Kd, bộ điều khiển càng đơn giản càng tốt.
Ứng dụng vào bài toán thực tế điều khiển tốc độ động cơ , nhóm em sử dụng
bộ PID trong mạch vòng vòng kín để làm sao cho tốc độ đầu ra luôn đáp ứng
được với tốc độ đặt với sai số nhỏ nhất.
Ở bài toán này chúng em sẽ mô phỏng tốc độ động cơ trên phần mềm Tia
Portal V16 . Các bước thực hiện sẽ được trình bày như sau :
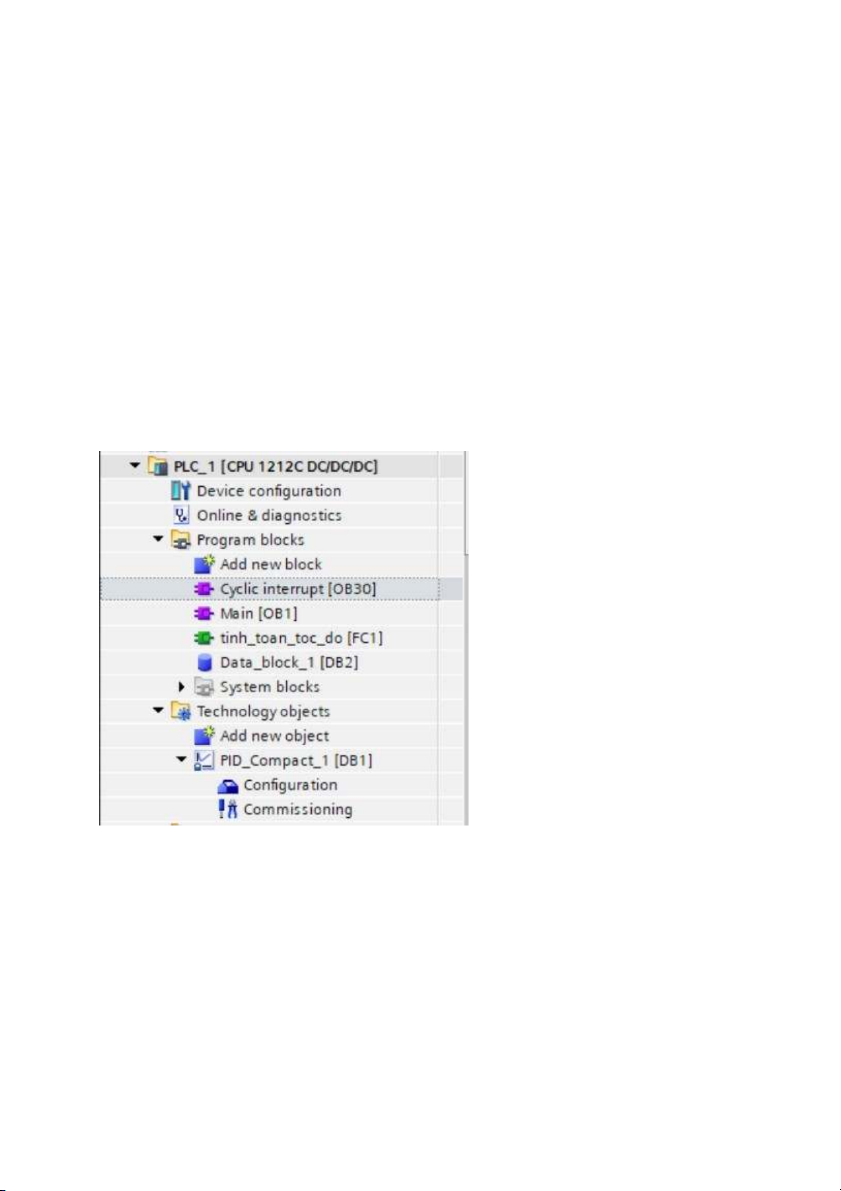
Bước 1 : Tạo 1 con CPU 1212C DC/DC/DC có High speed counter
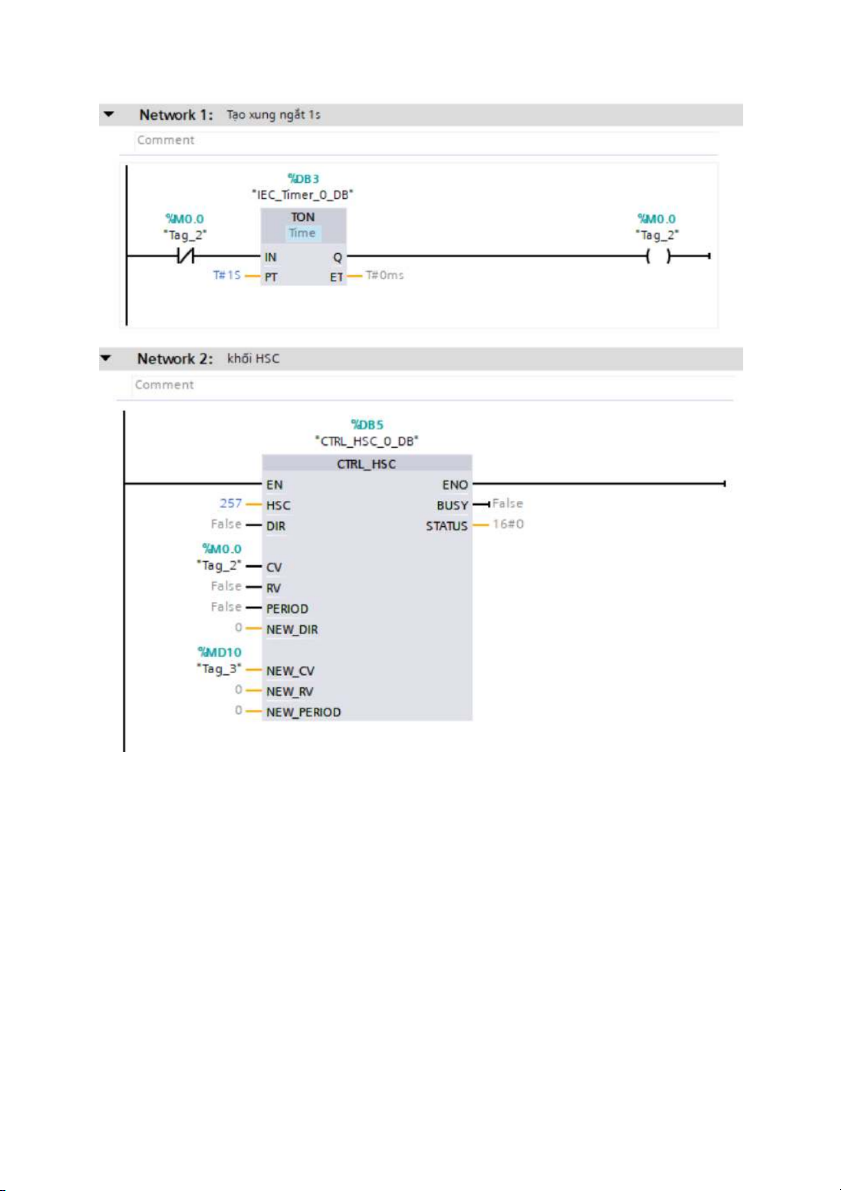
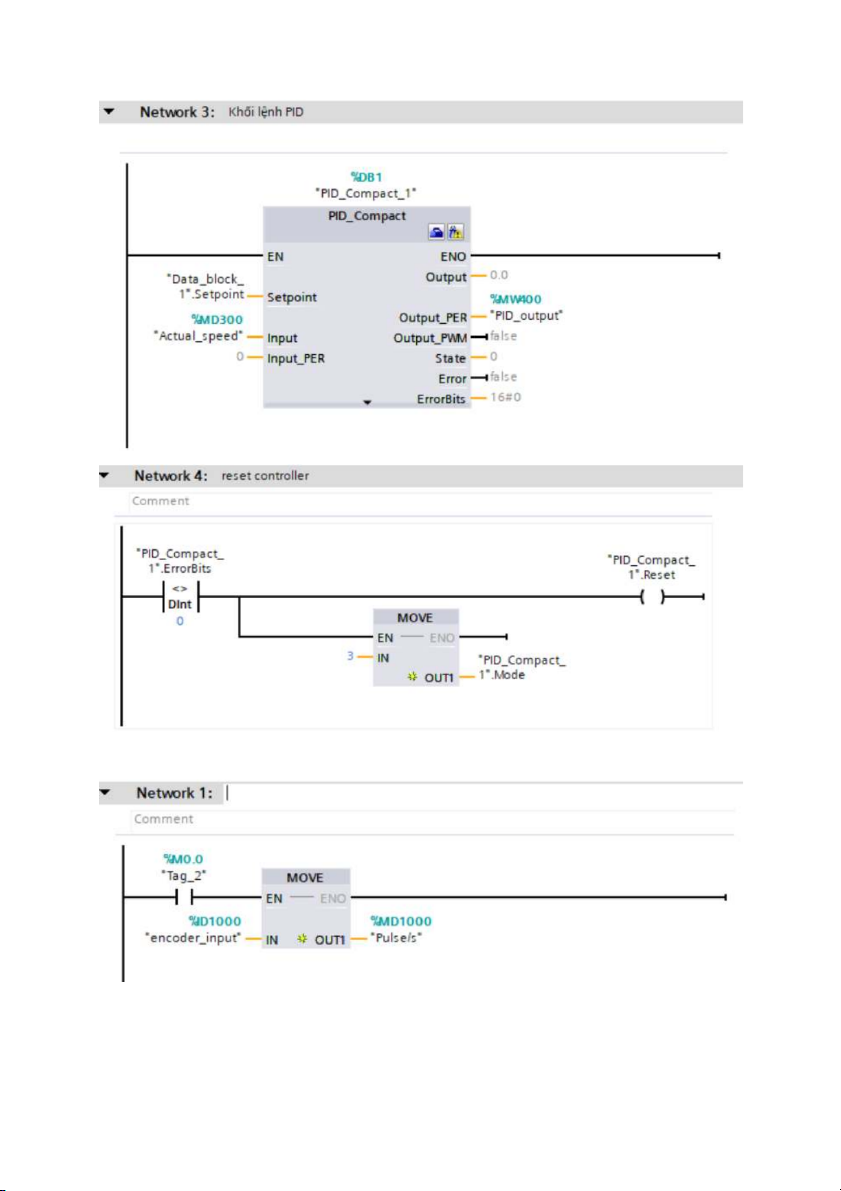
Bước 2 : Trong Program blocks tạo 1 khối Cyclic interrupt [OB30] có các
network được trình bày bên dưới
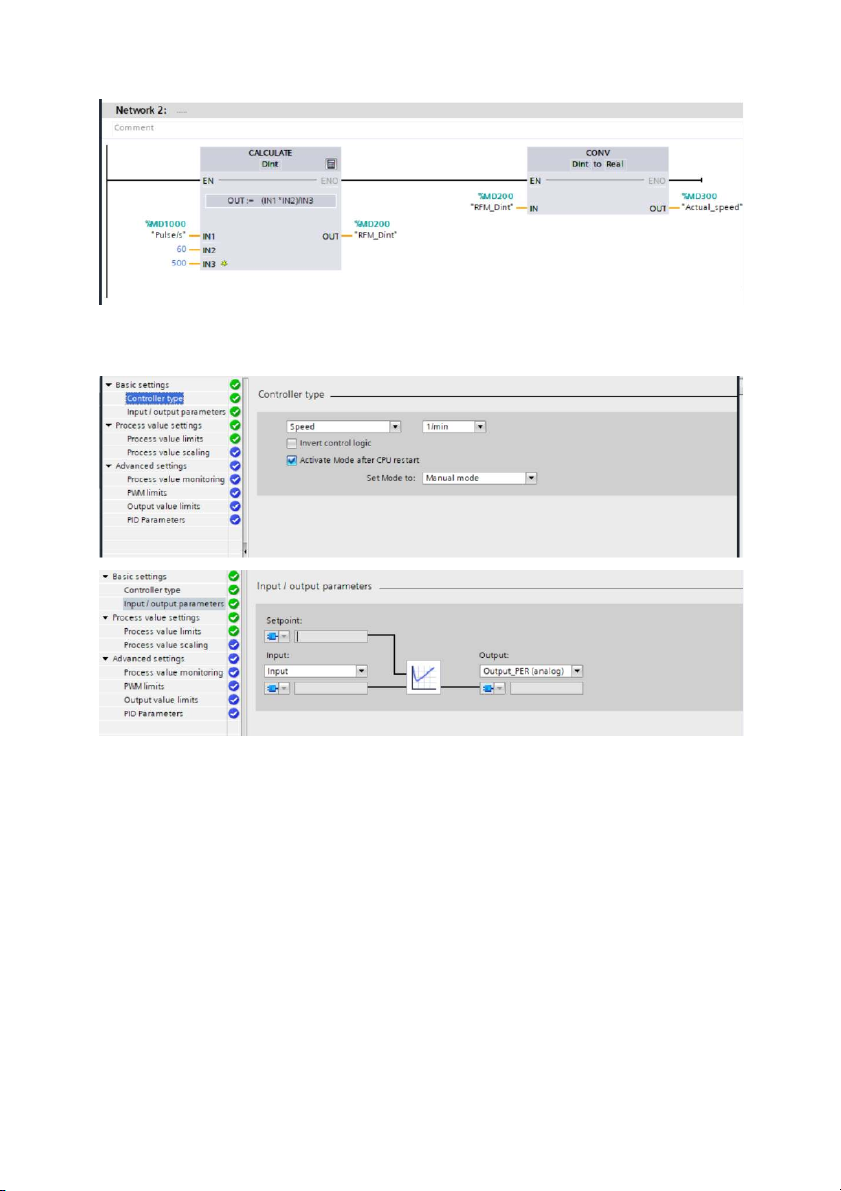
Bước 3 : trong Program blocks tạo 1 khối tinh_toan_toc_do [FC1]
Bước 4 : hiệu chỉnh các thông số trong khối lệnh PID_compact với yêu cầu đề bài điều khiển tốc độ
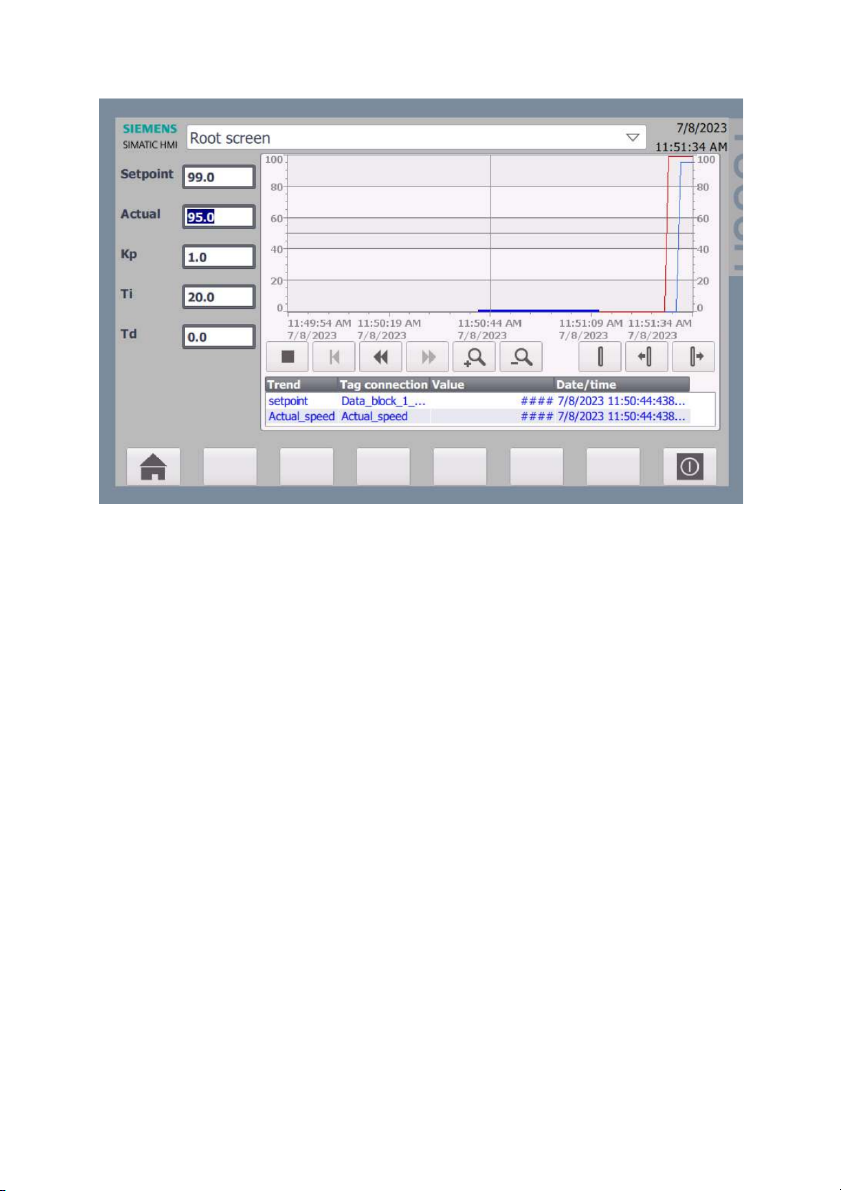
Bước 5 : Tạo màn hình HMI , trên màn hình có thể nhập được các thông số
Tài liệu liên quan:
-

Khí cụ điện - Bài tập Cơ Nhiệt | Trường Đại học Khánh Hòa
262 131 -

Các dạng bài tập dễ hiểu, có lời giải - Bài tập Cơ Nhiệt | Trường Đại học Khánh Hòa
357 179 -

In supercapacitors - Bài tập Cơ Nhiệt | Trường Đại học Khánh Hòa
273 137 -

Chế tạo prototype siêu tụ dẻo dựa trên hệ - Bài tập Cơ Nhiệt | Trường Đại học Khánh Hòa
221 111