Thực hành bài 2: Làm quen - Robot dò đường | Trường Đại học Bách khoa Hà Nội
Module cung cấp nguồn cho Alphabot (các thành phần 8, 9, 17,18 trong Hình 2) là một module được sử dụng để cung cấp nguồn điện cho các động cơ, cảm biến, vi điều khiển và các phần cứng khác của alphabot. Power supply cho alphabot là loại power supply sử dụng pin. Tài liệu được sưu tầm, giúp bạn ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Cấu trúc dữ liệu và giải thuật (ET2100) 139 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.1 K tài liệu
Tác giả:



Preview text:
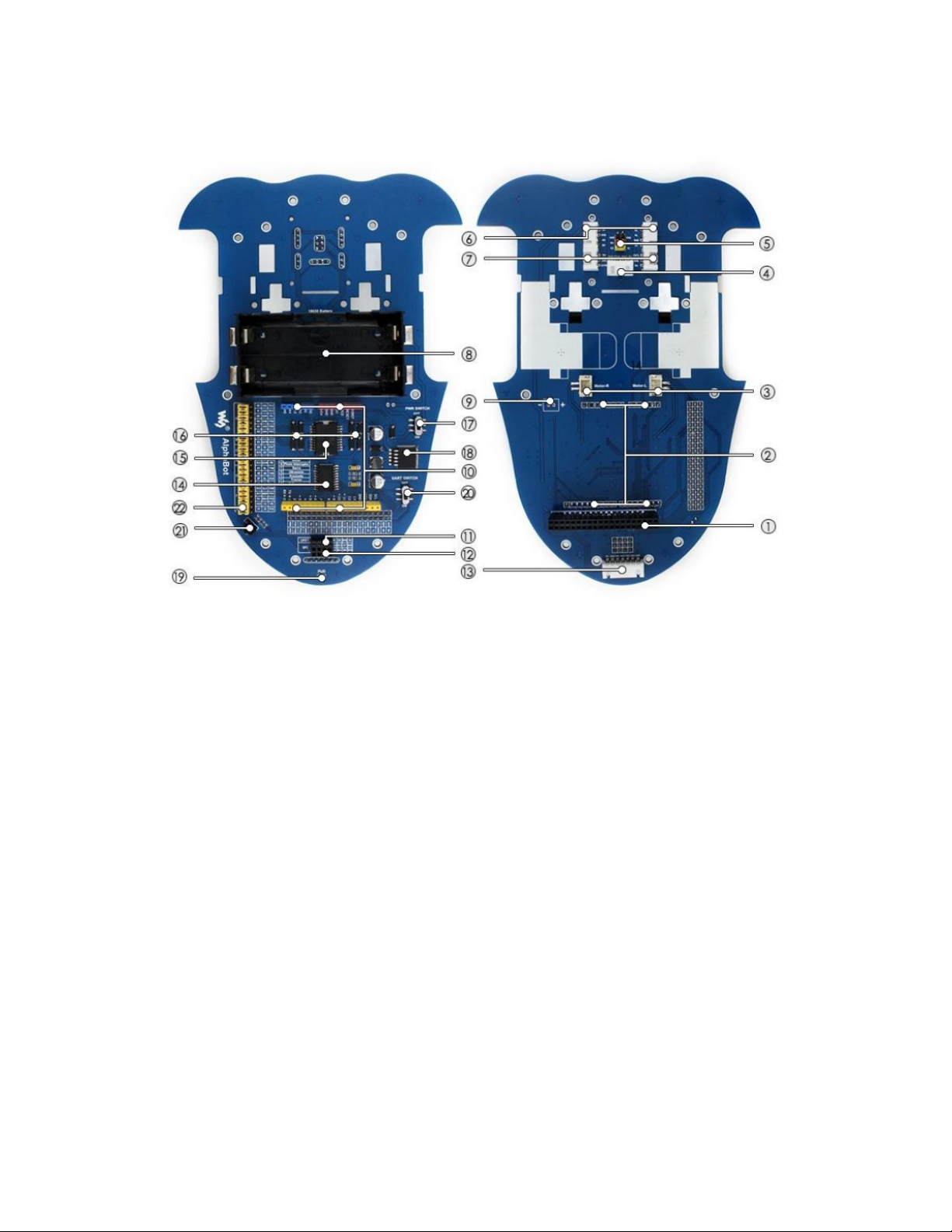
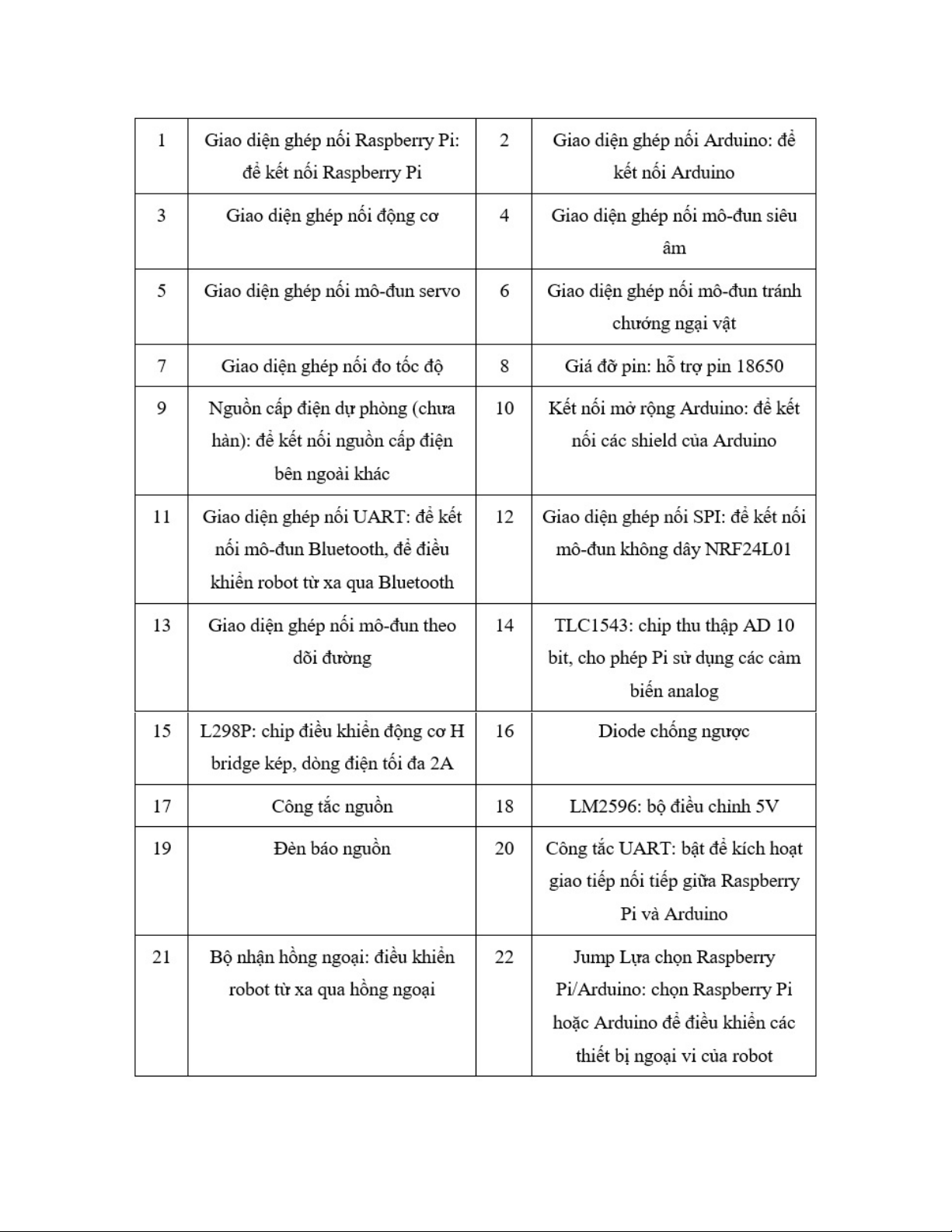
Nguồn cấp điện
Hình 2: Các thành phần trên bo mạch của Alphabot[1]
Module cung cấp nguồn cho Alphabot (các thành phần 8, 9, 17,18 trong Hình 2) là một
module được sử dụng để cung cấp nguồn điện cho các động cơ, cảm biến, vi điều khiển và các
phần cứng khác của alphabot. Power supply cho alphabot là loại power supply sử dụng pin
để lưu trữ và cung cấp nguồn điện cho alphabot. Power supply pin có ưu điểm là dễ dàng di
chuyển, không phụ thuộc vào nguồn điện ngoài và có thể sạc lại được. Tuy nhiên, power
supply pin cũng có nhược điểm là có dung lượng hạn chế, có thể bị hao mòn theo thời gian.
Một ví dụ về power supply pin là 18650 Lithium Battery Holder, là một khay đựng pin có thể
chứa 2 pin lithium 18650 và cung cấp nguồn điện 7.4V cho Alphabot.
Cảm biến dò đường
Hình 3. Module cảm biến dò đường [1]
Tracker sensor module (Hình 3) là một loại cảm biến được sử dụng để theo dõi đường đi của
robot. Tracker sensor module có thể phát hiện được các đường kẻ trắng hoặc đen trên nền
có màu khác nhau, và gửi tín hiệu cho vi điều khiển để điều chỉnh hướng chuyển động của
robot. Tracker sensor module thường được sử dụng trong các ứng dụng như robot dò đường,
robot tránh vật cản, robot theo dõi đối tượng và các ứng dụng khác .
Điều khiển động cơ
Module điều khiển động cơ (thành phần 15 trong Hình 2) là một loại mạch điện tử được sử
dụng để điều khiển động cơ của robot. Module điều khiển động cơ có chức năng nhận tín hiệu
từ vi điều khiển (như Arduino) và cấp nguồn cho động cơ để quay theo hướng và tốc độ mong
muốn. Motor driver module cũng có thể bảo vệ vi điều khiển khỏi các tác động ngược từ động
cơ, như dòng điện quá cao, nhiệt độ quá nóng hoặc các nhiễu điện từ.
Alpha robot sử dụng Module điều khiển động cơ là L298P Dual H-Bridge Motor Driver, là một
mạch có thể điều khiển hai động cơ DC hoặc một động cơ bước. L298P Dual H-Bridge Motor
Driver có thể nhận tín hiệu từ Arduino qua các chân tín hiệu kỹ thuật số và cấp nguồn cho
động cơ qua các chân nguồn. L298P Dual H-Bridge Motor Driver có thể cung cấp dòng điện
lên đến 2A cho mỗi động cơ và có thể điều chỉnh được tốc độ và hướng quay của động cơ. Robot đi thẳng
- Mở file Run_Test_Forward.ino bằng Arduino IDE.
- Kết nối Arduino với máy tính qua cáp USB và tải chương trình lên DFRduino UNO bằng Arduino IDE.
- Bật công tắc nguồn (17 trong Hình 2), kiểm tra hoạt động của robot có đi thẳng hay không. Robot rẽ phải
- Mở file Run_Test_RMotorForward.ino bằng Arduino IDE.
- Kết nối Arduino với máy tính qua cáp USB và tải chương trình lên DFRduino UNO bằng Arduino IDE.
- Bật công tắc nguồn (17 trong Hình 2), kiểm tra hoạt động của robot có đi thẳng và rẽ phải. Robot rẽ trái
- Mở file Run_Test_LMotorForward.ino bằng Arduino IDE.
- Kết nối Arduino với máy tính qua cáp USB và tải chương trình lên DFRduino UNO bằng Arduino IDE.
- Bật công tắc nguồn (17 trong Hình 2), kiểm tra hoạt động của robot có đi thẳng và rẽ trái. Robot đi lùi
- Mở file Run_Test_Backward.ino bằng Arduino IDE.
- Kết nối Arduino với máy tính qua cáp USB và tải chương trình lên DFRduino UNO bằng Arduino IDE.
- Bật công tắc nguồn (17 trong Hình 2), kiểm tra hoạt động của robot có đi lùi hay không.
Robot viết tên người
Dựa vào các code mẫu hãy lập trình để vẽ chữ in hoa đầu tiên của 1 bạn trong nhóm.
Tài liệu liên quan:
-

Chương 1: Tổng quan cấu trúc dữ liệu và giải thuật
17 9 -

Giáo trình môn Cấu trúc dữ liệu và giải thuật | Đại học Bách Khoa Hà Nội
23 12 -

Hướng dẫn thực dụng môn Cấu trúc dữ liệu và Giải thuật | Đại học Bách Khoa Hà Nội
32 16 -
Chapter VI: Searching Algorithms | Bài giảng cấu trúc dữ liệu và giải thuật
17 9 -
Chapter V: Sorting Algorithms | Bài giảng cấu trúc dữ liệu và giải thuật
19 10