Thuyết minh đồ án thiết kế hệ thống điều khiển | Trường Đại học Thủy Lợi
Thuyết minh đồ án thiết kế hệ thống điều khiển | Trường Đại học Thủy Lợi. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời đọc đón xem!
Môn: Công nghệ phần mềm (CSE481) 27 tài liệu
Trường: Trường Đại học Thủy Lợi 566 tài liệu
Tác giả:






Preview text:
BỘ GIÁO DỤC VÀ ĐÀO TẠO
BỘ NÔNG NGHIỆP VÀ MÔI TRƯỜNG
TRƯỜNG ĐẠI HỌC THỦY LỢI THUYẾT MINH
ĐỒ ÁN THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN GVHD
: Th.s Nguyễn Tiến Thịnh
Sinh viên : Nguyễn Đức Ngần Lớp : 64CDT4 MSSV : 2251201384 Hà Nội, 2026 MỤC LỤC
CHƯƠNG 1. PHÂN TÍCH LỰA CHỌN GIẢI PHÁP ĐIỀU KHIỂN ....................... 1 1.1
Phân tích yêu cầu điều khiển ............................................................................ 1 1.1.1
Xác định bài toán điều khiển ..................................................................... 1
Xác định ràng buộc và giới hạn điều khiển ............................................................. 1 1.2
Phân tích, lựa chọn bộ điều khiển và phần mềm lập trình bộ điều khiển ......... 1 1.2.1
Phân tích lựa chọn bộ điều khiển .............................................................. 1 1.2.2
Phương án điều khiển được lựa chọn ........................................................ 3 1.2.3
Phần mềm lập trình Arduino IDE ............................................................. 3
CHƯƠNG 2. THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN ................................................ 5 2.1
Thiết kế sơ đồ khối hệ thống điều khiển ........................................................... 5 2.2
Tính và lựa chọn thiết bị cho hệ thống điều khiển ........................................... 6 2.2.1
Cảm biến và các thiết bị tín hiệu vào của bộ điều khiển ........................... 6 2.2.2
Động cơ và các cơ cấu chấp hành ............................................................. 9 2.2.3
Driver động cơ ......................................................................................... 11 2.2.4
Thiết bị truyền thông ............................................................................... 13 2.2.5
Bộ điều khiển trung tâm .......................................................................... 15 2.2.6
Nguồn điện .............................................................................................. 20 2.2.7
Tổng hợp các thiết bị ............................................................................... 25 2.3
Thiết kế sơ đồ nguyên lý mạch điện ............................................................... 26 2.4
Thiết kế sơ đồ đấu nối mạch điện ................................................................... 30
CHƯƠNG 3. CHƯƠNG TRÌNH ĐIỀU KHIỂN ....................................................... 32 3.1
Mô tả hoạt động của hệ thống......................................................................... 32 3.2
Sơ đồ khối thuật toán chương trình điều khiển .............................................. 33 3.3
Lập trình theo các mô đun .............................................................................. 36
CHƯƠNG 4. MÔ PHỎNG HỆ THỐNG ĐIỀU KHIỂN ........................................... 41 4.1
Lựa chọn phần mềm mô phỏng ...................................................................... 41 4.2
Mô hình hóa hệ thống ..................................................................................... 42 4.3
Mô phỏng hoạt động các thiết bị hệ thống điều khiển.................................... 43
CHƯƠNG 5. THIẾT KẾ GIAO DIỆN ĐIỀU KHIỂN .............................................. 44 5.1
Bố cục giao diện điều khiển............................................................................ 44 5.2
Nền tảng xây dựng giao diện .......................................................................... 44 5.3
Công cụ xây dựng giao diện ........................................................................... 45 5.4
Kết nối giữa giao diện và bộ điều khiển trung tâm......................................... 45
TÀI LIỆU THAM KHẢO ............................................................................................. 46 CHƯƠNG 1.
PHÂN TÍCH LỰA CHỌN GIẢI PHÁP ĐIỀU KHIỂN
1.1 Phân tích yêu cầu điều khiển
1.1.1 Xác định bài toán điều khiển
Biến được điều khiển Biến điều khiển
− Tín hiệu điều khiển tốc độ động cơ − Khoảng cách di chuyển: PWM − Trạng thái động cơ
− Tín hiệu điều khiển động cơ cắt: Digital
1.1.2 Xác định ràng buộc và giới hạn điều khiển
Giới hạn biến điều khiển
Giới hạn biến được điều khiển/ cảm biến
− Giá trị điều khiển PWM từ arduino: 0 – 255
− Điện áp điều khiển khởi động từ: 0 − Rải đo khoảng cách cảm biến siêu âm: - 12V 2-300cm
− Điện áp điều khiển từ arduino: 0 – 5V
1.2 Phân tích, lựa chọn bộ điều khiển và phần mềm lập trình bộ điều khiển
1.2.1 Phân tích lựa chọn bộ điều khiển
Khi thiết kế hệ thống điều khiển (điều khiển đèn thông minh, robot nhỏ, hệ thống giám
sát môi trường…), việc chọn bộ điều khiển trung tâm phù hợp là bước quyết định đến
hiệu quả, chi phí và thời gian phát triển dự án. Dưới đây là phân tích so sánh giữa các
loại bộ điều khiển phổ biến: Vi điều khiển (MCU), PLC, Máy tính nhúng (SBC).
a) Vi điều khiển (Microcontroller – MCU)
Đặc điểm: Một chip tích hợp CPU, RAM, ROM, I/O trên cùng một vi mạch như ATmega328P, ESP32, STM32. Ưu điểm: 1
+ Tiêu thụ điện năng thấp, rất phù hợp cho hệ thống chạy pin hoặc năng lượng mặt trời
+ Phản hồi thời gian thực tốt, khởi động ngay khi cấp nguồn
+ Dễ kết nối trực tiếp với cảm biến và cơ cấu chấp hành
+ Kích thước nhỏ gọn, chi phí thấp
+ Dễ lập trình, cộng đồng hỗ trợ lớn Nhược điểm:
+ Khả năng xử lý và bộ nhớ hạn chế
+ Không phù hợp cho các ứng dụng xử lý dữ liệu lớn, hình ảnh hoặc AI phức tạp
b) PLC (Programmable Logic Controller)
Đặc điểm: Thiết bị công nghiệp dùng để tự động hóa dây chuyền sản xuất. Ưu điểm:
+ Độ tin cậy và độ bền rất cao
+ Hoạt động ổn định trong môi trường công nghiệp khắc nghiệt
+ Dễ bảo trì, chuẩn hóa cao
+ Phù hợp cho hệ thống điều khiển cố định, liên tục Nhược điểm: + Giá thành cao
+ Kích thước lớn, khó tích hợp cho hệ thống di động
+ Tiêu thụ năng lượng lớn
+ Ít linh hoạt khi thay đổi hoặc mở rộng chức năng
c) Máy tính nhúng (Raspberry Pi)
Đặc điểm: Máy tính thu nhỏ chạy hệ điều hành đầy đủ (Linux, Windows IoT). Ưu điểm: + Năng lực xử lý mạnh
+ Có thể chạy hệ điều hành (Linux)
+ Phù hợp cho xử lý hình ảnh, dữ liệu lớn, AI
+ Hỗ trợ nhiều chuẩn giao tiếp và giao diện người dùng Nhược điểm:
+ Tiêu thụ điện năng cao
+ Thời gian khởi động lâu
+ Khả năng đáp ứng thời gian thực kém hơn vi điều khiển 2
+ Cấu trúc phần mềm phức tạp, dễ mất ổn định
1.2.2 Phương án điều khiển được lựa chọn
Sau khi cân nhắc toàn diện, dự án quyết định sử dụng vi điều khiển Arduino làm bộ điều
khiển trung tâm bởi các lý do sau:
+ Chi phí thấp, phù hợp với mục tiêu học tập và nghiên cứu, giúp tiết kiệm ngân sách dự án.
+ Yêu cầu kiến thức phần cứng tối thiểu, giúp người phát triển dễ dàng kết nối và vận hành.
+ Hỗ trợ đa dạng module cảm biến và động cơ, thuận tiện cho việc tích hợp và mở rộng hệ thống.
+ Cộng đồng người dùng lớn, với hàng triệu người trên toàn cầu, dễ dàng tìm kiếm
hướng dẫn và giải pháp khi gặp sự cố.
+ Tiêu thụ năng lượng thấp, rất phù hợp với các thiết bị sử dụng pin hoặc năng lượng mặt trời.
1.2.3 Phần mềm lập trình Arduino IDE
Phần mềm Arduino là môi trường lập trình và điều khiển được sử dụng để xây dựng
chương trình cho bộ điều khiển trung tâm của hệ thống. Phần mềm được phát triển trên
Arduino IDE, sử dụng ngôn ngữ C/C++ đơn giản, dễ tiếp cận và phù hợp cho các hệ
thống nhúng. Chương trình có cấu trúc cơ bản gồm hàm setup() dùng để khởi tạo các
chân vào/ra, thiết lập hoạt động cho cảm biến, động cơ và các thiết bị ngoại vi; và hàm
loop() được thực thi lặp lại liên tục để xử lý tín hiệu đầu vào, thực hiện thuật toán điều
khiển và xuất tín hiệu điều khiển ra các cơ cấu chấp hành.
Nó có các phiên bản cho các hệ điều hành như MAC, Windows, Linux và chạy trên nền
tảng Java đi kèm với các chức năng và lệnh có sẵn đóng vai trò quan trọng để gỡ lỗi,
chỉnh sửa và biên dịch mã trong môi trường. Có rất nhiều các module Arduino như
Arduino Uno, Arduino Mega, Arduino Leonardo, Arduino Micro và nhiều module khác.
Mỗi module chứa một bộ vi điều khiển trên bo mạch được lập trình và chấp nhận thông
tin dưới dạng mã. Mã chính, còn được gọi là sketch, được tạo trên nền tảng IDE sẽ tạo
ra một file Hex, sau đó được chuyển và tải lên trong bộ điều khiển trên bo. Môi trường 3
IDE chủ yếu chứa hai phần cơ bản: Trình chỉnh sửa và Trình biên dịch, phần đầu sử
dụng để viết mã được yêu cầu và phần sau được sử dụng để biên dịch và tải mã lên module Arduino.
Arduino IDE có một giao diện đơn giản, dễ sử dụng giúp người dùng thuận tiện hơn
trong thao tác. Dưới đây là một số tính năng chúng ta thường sử dụng:
+ Nút kiểm tra chương trình (Verify): giúp dò lỗi phần code định truyền xuống bo mạch Arduino.
+ Nút tải đoạn code vào bo mạch Arduino (Upload): giúp nhập đoạn code vào bo mạch Arduino.
+ Vùng lập trình: người dùng sẽ viết chương trình tại khu vực này.
+ Thanh Menu: gồm những thẻ chức năng nằm trên cùng như File, Edit, Sketch, Tools, Help. 4 CHƯƠNG 2.
THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN
2.1 Thiết kế sơ đồ khối hệ thống điều khiển Acquy Tấ m pin Bộ điểu khiển sạc ACQUY năng lượng năng mặt trời lượng mặt trời Nguồn điện Nút Nhấn Động Cơ Di Chuyển am Cảm Biến Modul ModulL28 Vi Điều K 9N hiể n Siêu Âm L298N Động Cơ Cắt LCD 20X4
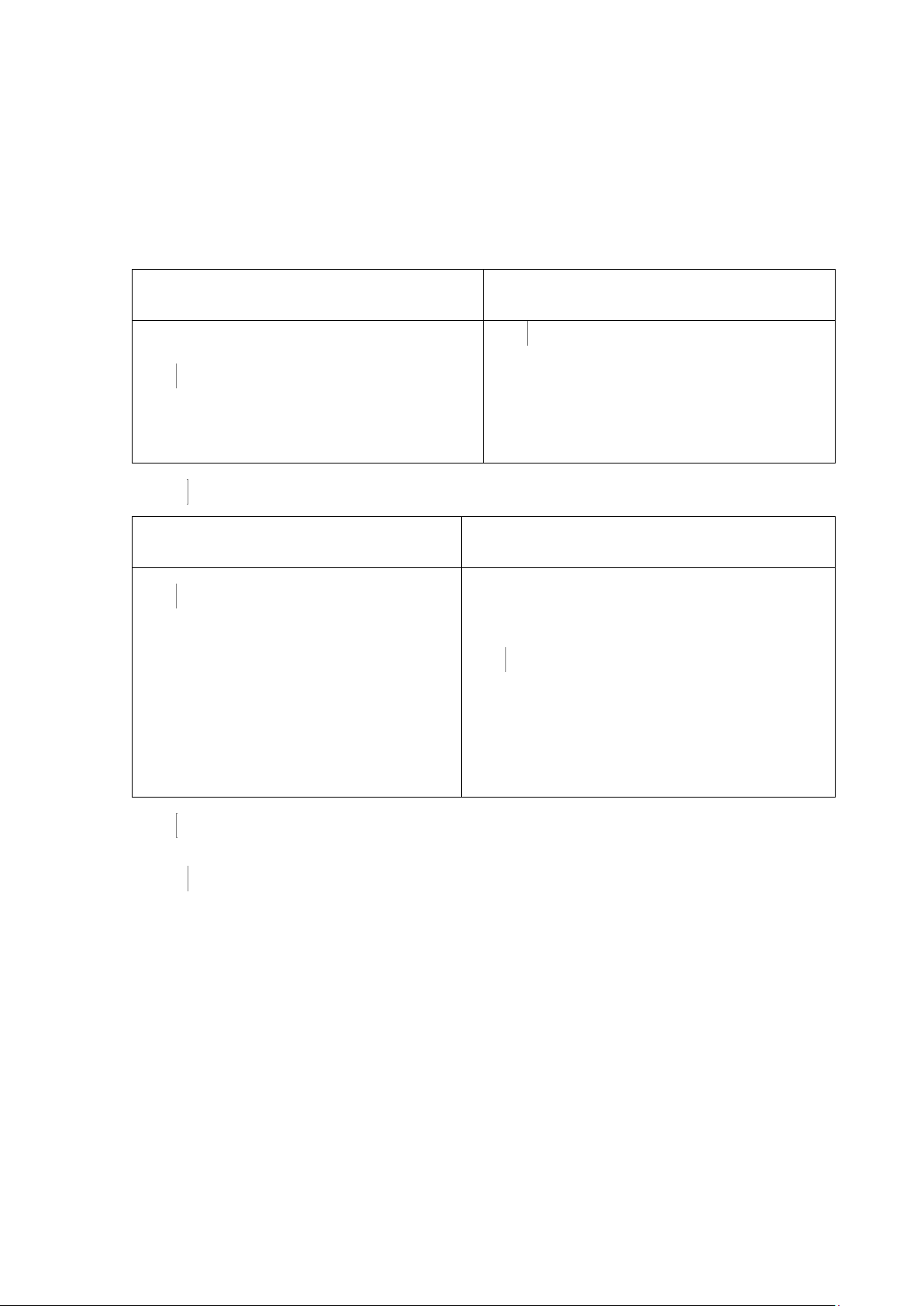
Hình 2.1. Sơ đồ khối hệ thống điều khiển.
Sơ đồ khối trên mô tả nguyên lý hoạt động tổng thể của robot cắt cỏ sử dụng năng lượng
mặt trời. Năng lượng được thu từ tấm pin mặt trời, sau đó đi qua bộ điều khiển sạc để
sạc và bảo vệ ắc quy, đảm bảo cung cấp nguồn điện ổn định cho toàn hệ thống. Từ ắc
quy, nguồn điện được phân phối đến các khối chức năng như vi điều khiển, cảm biến,
LCD và các động cơ. Vi điều khiển Arduino đóng vai trò trung tâm, nhận tín hiệu từ nút
nhấn và cảm biến siêu âm để xử lý và đưa ra quyết định điều khiển. Thông tin trạng thái
và chế độ làm việc được hiển thị trên LCD 20x4. Tín hiệu điều khiển từ vi điều khiển 5
được đưa tới module L298N để điều khiển động cơ di chuyển và động cơ cắt, giúp robot
vận hành đúng theo chương trình đã thiết lập.
2.2 Tính và lựa chọn thiết bị cho hệ thống điều khiển
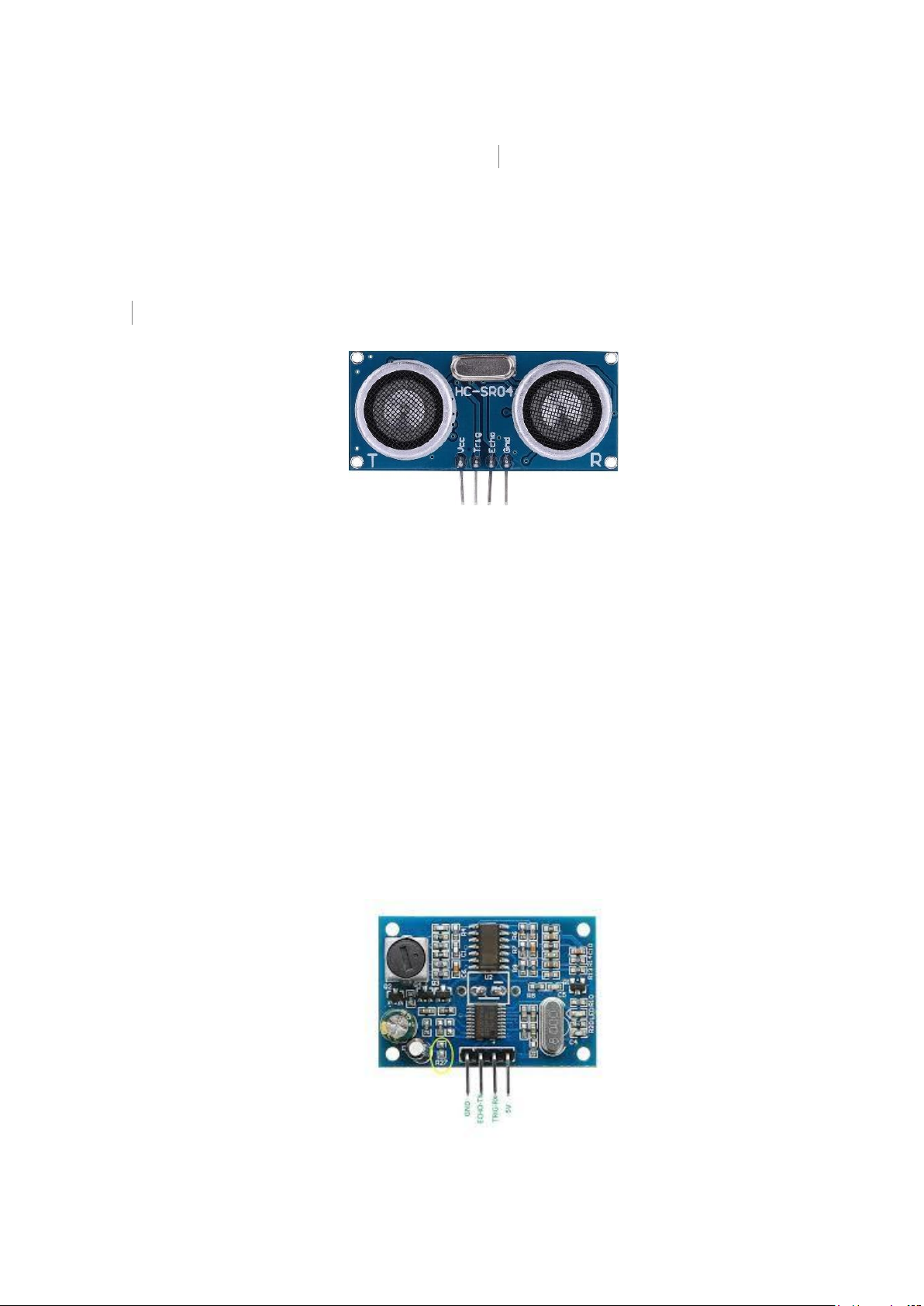
2.2.1 Cảm biến và các thiết bị tín hiệu vào của bộ điều khiển a) Cảm biến siêu âm
Hình 2.2. Cảm biến siêu âm
Mục dích sử dụng: Cảm biến trước robot phát hiện vật cản trong 30–40 cm, gửi tín hiệu
cho bộ điều khiển để robot giảm tốc, dừng hoặc rẽ hướng tránh va chạm. Thông sỗ kỹ thuật:
- Điện áp hoạt động: 5V DC (có một số biến thể hỗ trợ 3.3V-5V).
- Dòng điện: < 2mA (hoặc < 15mA).
- Khoảng cách đo: Thường từ 2cm - 300cm (3m).
- Độ chính xác: ± 3mm (hoặc 0.3cm).
- Tần số siêu âm: 40KHz.
- Góc quét hiệu quả: < 15 độ.
- Chân kết nối: 4 chân (VCC, Trig, Echo, GND)
Hình 2.3 Sơ đồ chân Cảm biến siêu âm 6
Bảng mô tả các chân của cảm biến: STT Tên chân
Chức năng của chân 1 VCC
Cấp điện áp +5 V cho cảm biến
Nhận tín hiệu xung đầu vào từ vi điều khiển để 2 Trig phát sóng siêu âm
Xuất tín hiệu xung phản hồi, thời gian phản hồi tỷ 3 Echo
lệ với khoảng cách vật thể 4 GND Nối đất
Bảng 1. Bảng mô tả chân cảm biến Nguyên lý hoạt động:
- Phát sóng: Chân Trig phát ra một xung kích hoạt, tạo ra một chùm sóng siêu âm ngắn có tần số cao.
- Phản xạ và nhận sóng: Khi sóng siêu âm gặp vật cản, nó sẽ phản xạ trở lại. Chân Echo
nhận sóng phản xạ và xuất ra một xung mức cao (HIGH) với độ rộng tỷ lệ với thời gian truyền sóng.
- Tính toán khoảng cách: Khoảng cách từ cảm biến đến vật cản được xác định theo công thức:
Thời gian truyeˆˋn soˊng × Vận toˆˊc aˆm thanh Khoảng caˊch = 2 b) Nút nhấn Mục dích sử dụng:
- Hệ thống dùng nút nhấn trong hệ thống giúp người dùng có thể chọn chế độ tự động
hoặc chế độ thủ công. Khi ở chế độ thủ công, người dùng có thể điều khiển đông cơ
như: tiến, lùi, rẽ trái,phải và bật tắt động cơ cắt. 7 Hình 2.3.Nút nhấn Thông số kĩ thuật: - Nút nhấn: thường mở - Lực nhấn: 160-250g
- Độ bền cơ học: Khoảng 100.000 lần nhấn - Số chân: 2 chân
Bảng mô tả chân nút nhấn:
Hình 2.4.Sơ đò chân nút nhấn STT Tên chân
Chức năng của chân 1 3 NO Tiếp điểm thường mở 2 4 NO Tiếp điểm thường mở
Bảng 2. Bảng mô tả chân nút nhấn Nguyên lý hoạt động:
- Khi nhấn nút, mạch điện đóng hoặc mở, tạo tín hiệu digital gửi tới vi điều khiển. Vi
điều khiển nhận tín hiệu này, xử lý theo lập trình và điều khiển các cơ cấu chấp hành tương ứng 8
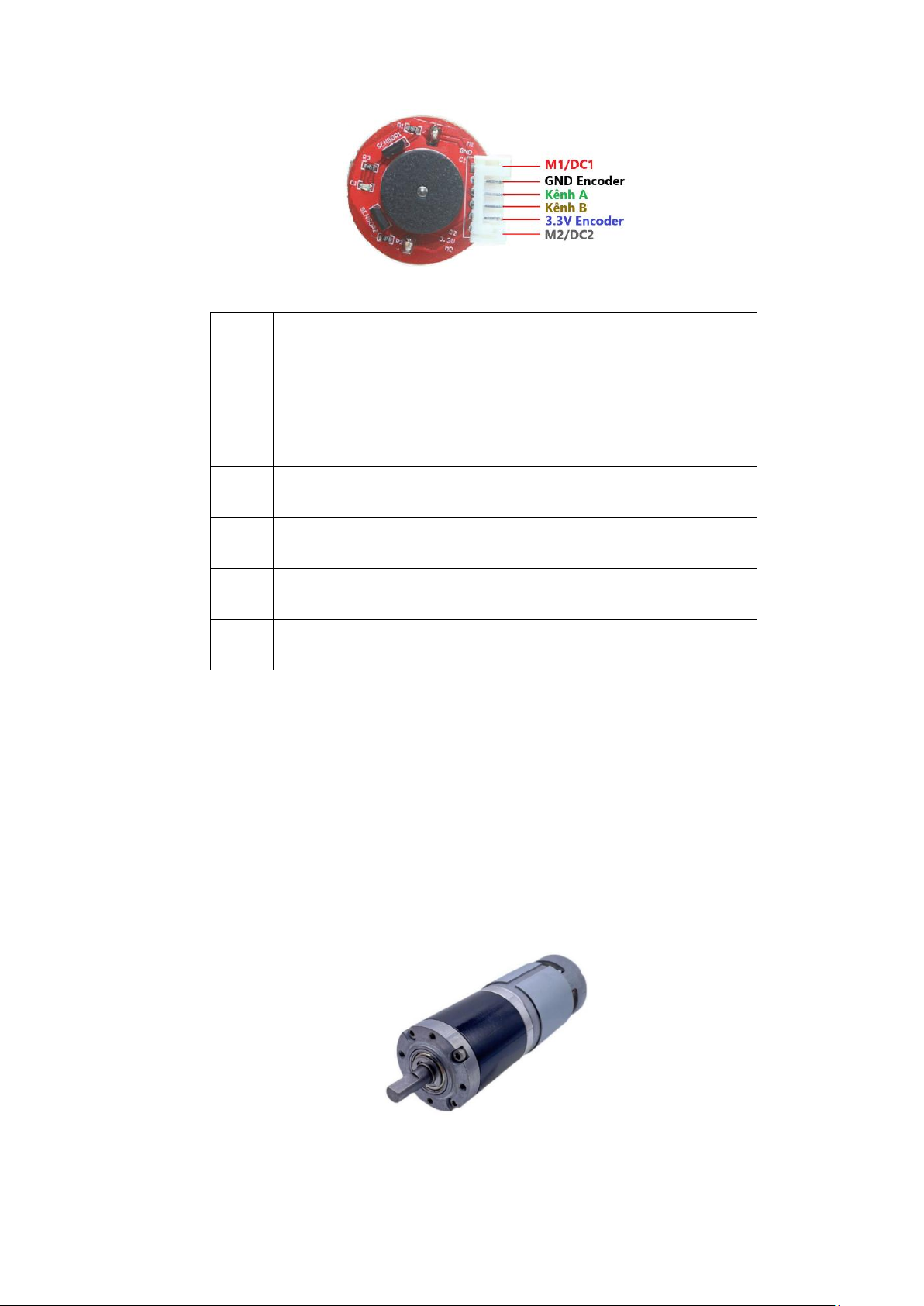
2.2.2 Động cơ và các cơ cấu chấp hành a) Động cơ di chuyển
Hình 2.5.ENCODER JGY-370 Mục dích sử dụng:
Tạo chuyển động cho bánh xe; Encoder giúp đo quãng đường, vận tốc và giữ robot đi thẳng theo quỹ đạo Thông số kỹ thuật:
- Điện áp hoạt động: 12VDC (phổ biến), một số phiên bản sử dụng 24VDC.
- Dòng điện định mức: 0,3 – 1,5 A (tùy tải và tỉ số truyền).
- Công suất định mức: khoảng 10 – 30 W.
- Tốc độ quay trục ra: 30 – 300 vòng/phút (rpm), phụ thuộc vào tỉ số truyền của hộp giảm tốc.
- Mô men xoắn: lớn, có thể đạt từ 5 đến 30 kg·cm (tùy loại động cơ và hộp giảm tốc).
- số truyền hộp giảm tốc: lớn (ví dụ: 1:30, 1:60, 1:100 hoặc cao hơn).
- Đường kính trục: 6 mm.
- Kích thước tổng thể: khoảng 77 × 32 × 21,5 mm.
Đặc điểm: Động cơ giảm tốc có tỉ số truyền cao, cho mô men xoắn lớn, lực kéo mạnh,
khả năng tự hãm tốt, hoạt động ổn định và phù hợp với các hệ thống truyền động yêu
cầu độ chính xác và độ tin cậy cao. Động cơ thường có tốc độ quay thấp, giúp kiểm soát
chuyển động mượt mà và an toàn cho các cơ cấu cơ khí. Kích thước nhỏ gọn và thiết kế
chắc chắn giúp dễ dàng lắp đặt trong không gian hạn chế và chịu tải lâu dài. Nhờ khả
năng vận hành liên tục và bền bỉ, loại động cơ này thích hợp cho nhiều ứng dụng công
nghiệp như băng tải, robot và các máy móc tự động.
Bảng mô tả của động cơ: 9
Hình 2.6.Sơ đồ chân động cơ Encoder STT Tên chân
Chức năng của chân 1 M1 Dây nguồn động cơ 2 GND Nguồn cấp encoder 3 C1 Kênh xung A 4 C2 Kênh xung B 5 VCC Nguồn encoder 6 M2 Dây nguồn động cơ
Bảng 3. Bảng mô tả chân động cơ di chuyển
Nguyên lý hoạt động: Khi cấp nguồn DC, động cơ quay tạo chuyển động. Chuyển động
này đi qua hộp giảm tốc để giảm tốc độ và tăng mô men. Encoder (nếu có) phát xung
theo vòng quay để vi điều khiển đo tốc độ, vị trí và điều khiển chính xác. Đảo cực để
đổi chiều, dùng PWM để điều chỉnh tốc độ. b) Động cơ cắt
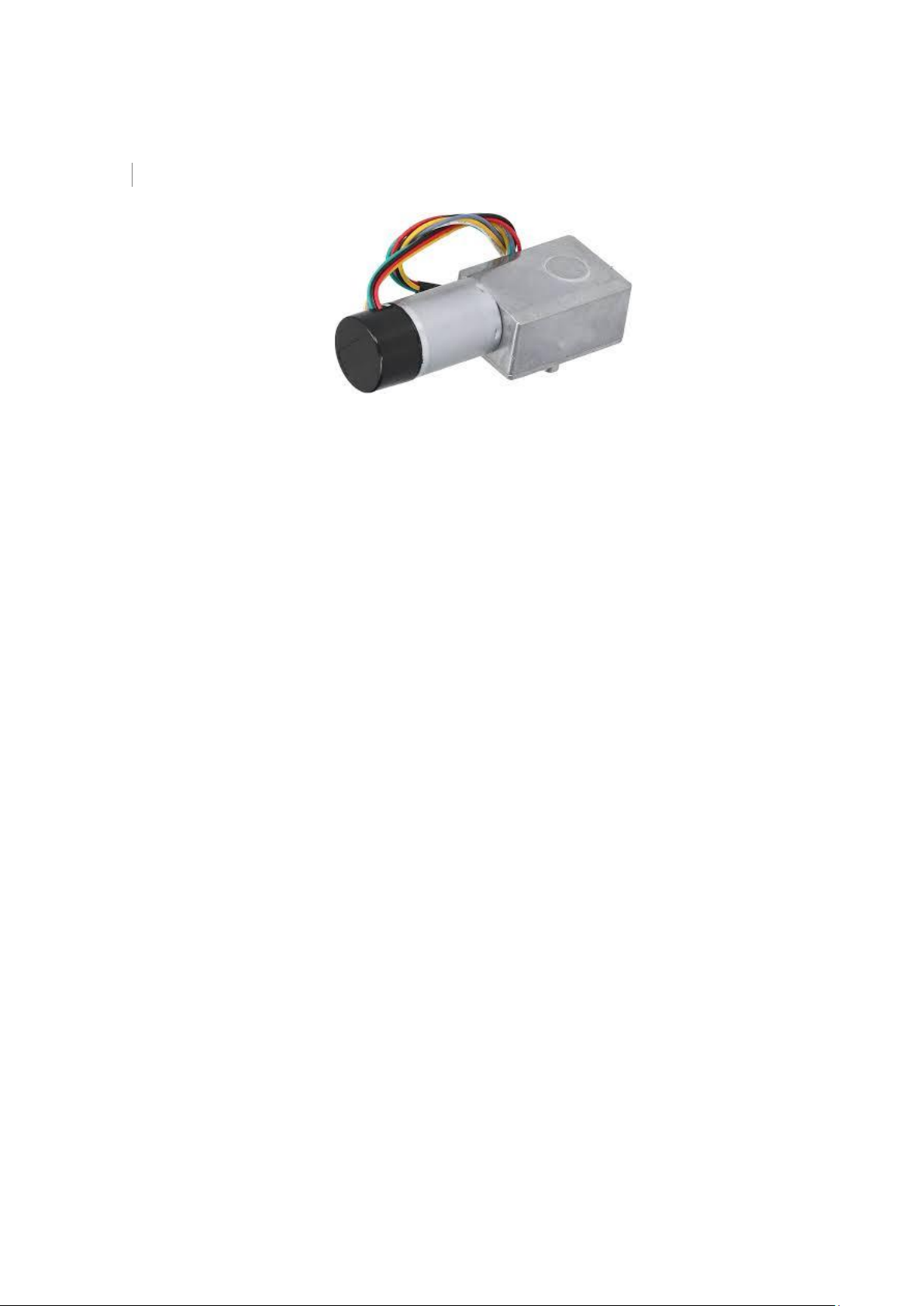
Mục đích sử dụng: Động cơ cắt dùng để tạo chuyển động quay tốc độ cao nhằm cắt cỏ
Hình 2.7. Động cơ cắt cỏ Motor 895( 12V-180W) 10 Thông số kỹ thuật:
- Điện áp hoạt động: 12VDC (phổ biến), một số phiên bản sử dụng 24VDC.
- Đường kính trục: 6 mm.
- Kích thước tổng thể: khoảng 77 × 32 × 21,5 mm.
Đặc điểm: Động cơ giảm tốc có tỉ số truyền lớn, tạo mô men xoắn cao, lực kéo lớn và
có khả năng tự hãm, phù hợp cho các ứng dụng yêu cầu độ ổn định và chính xác trong truyền động.
Bảng mô tả của động cơ:
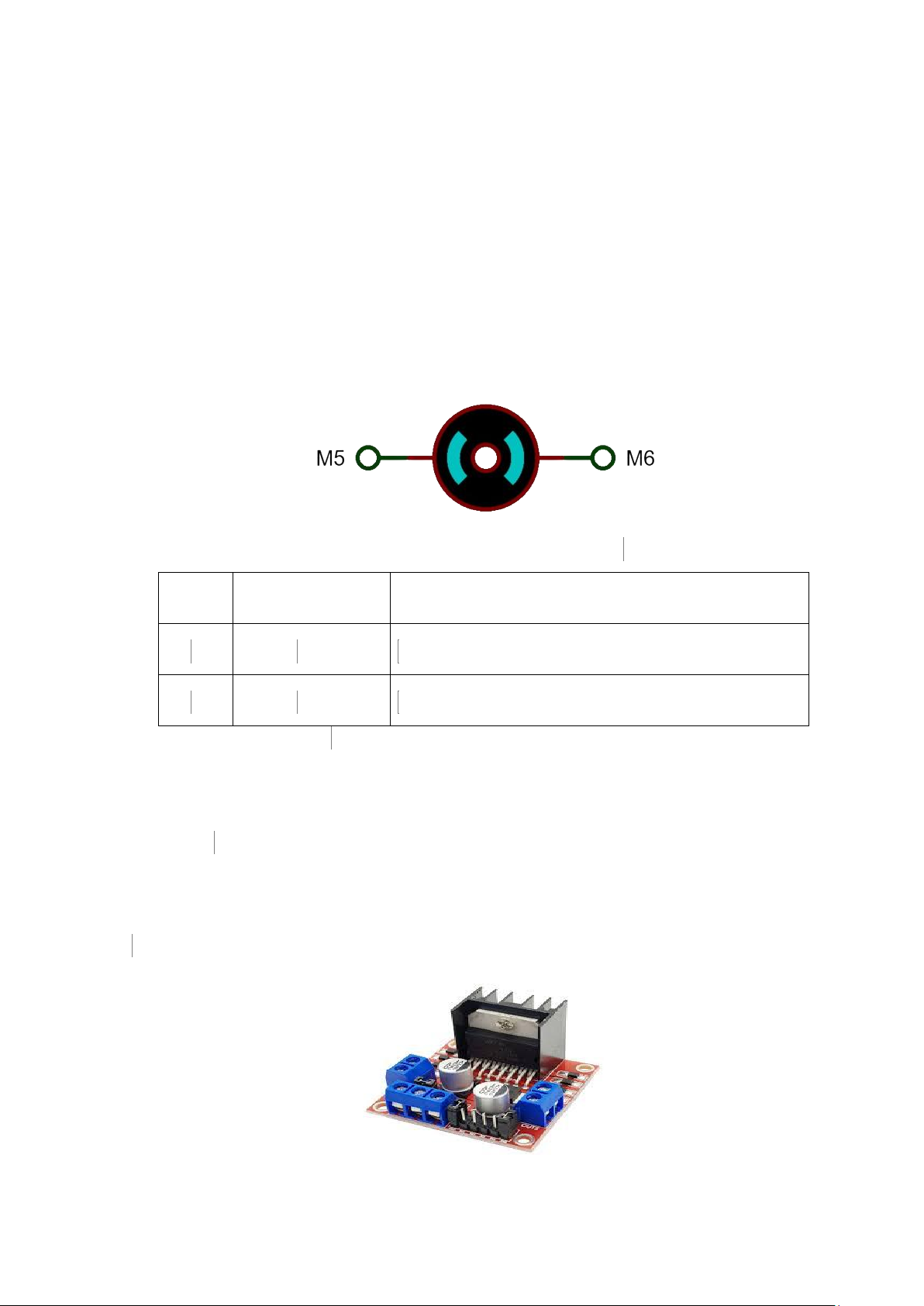
Hình 2.8. Sơ đồ chân động cơ cắt STT Tên chân
Chức năng của chân 1 M5 Cấp nguồn cho động cơ 2 M6 Cấp nguồn cho động cơ
Bảng 4. Bảng mô tả chân động cơ cắt
Nguyên lí hoạt động: Hoạt động dựa trên dòng điện một chiều (DC), có chổi than, tạo
ra lực quay mạnh với tốc độ cao và mô-men xoắn lớn, phù hợp cho các ứng dụng cần sức mạnh.
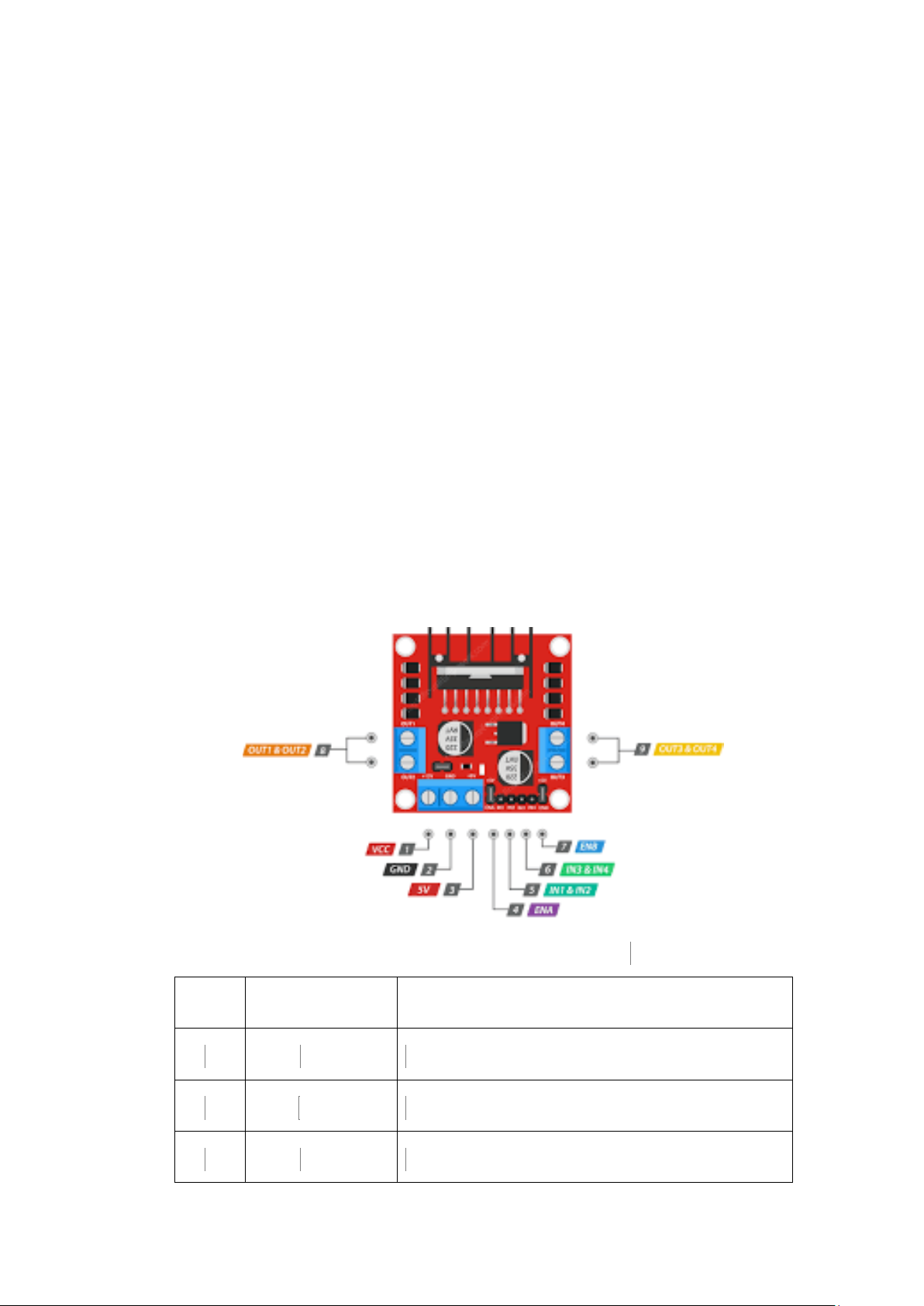
2.2.3 Driver động cơ a) Modul L298N Hình 2.9.Modul L298N 11 Thông số kỹ thuật:
- Module điều khiển: L298N (dòng điều khiển 2A).
- Chip điều khiển: Mạch cầu H kép (Dual H-Bridge L298N).
- Điện áp cấp cho động cơ (tối đa): 46 V.
- Dòng điện cấp cho động cơ (tối đa): 2 A. - Điện áp logic: 5 V.
- Điện áp hoạt động của IC: 5 – 35 V.
- Dòng điện hoạt động của IC: tối đa 2 A. - Dòng logic: 0 – 36 mA.
- Chức năng bảo vệ và giám sát: Tích hợp khả năng cảm biến dòng điện cho từng động cơ.
- Tản nhiệt: Module được trang bị khối tản nhiệt, giúp nâng cao hiệu suất và độ ổn định
trong quá trình làm việc.
Bảng mô tả chân của drive:
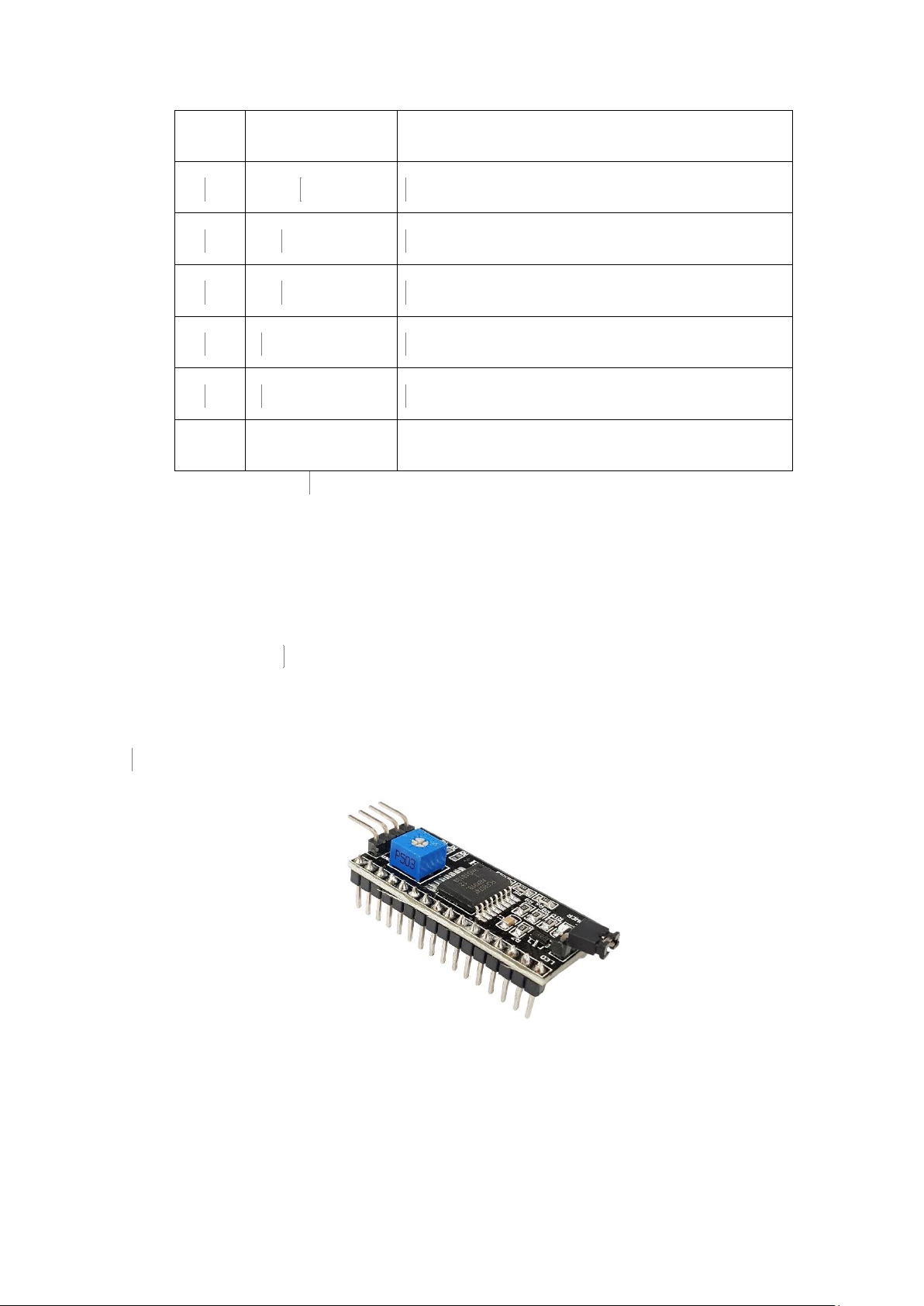
Hình2.10. Sơ đồ chân modul L298N STT Tên chân
Chức năng của chân 1 VCC
Cấp nguồn chính cho động cơ 2 GND Chân nối đất chung 3 ENA
Chân cho phép điều khiển tốc độ bằng PWM 12 STT Tên chân
Chức năng của chân 4 ENB
Chân cho phép điều khiển tốc độ bằng PWM 5 IN1&IN2 Điều khiển động cơ A 6 IN3&IN4 Điều khiển động cơ B 7
OUT1&OUT2 Nối với động cơ A 8
OUT3&OUT4 Nối với động cơ B 9 5V Nguồn 5V cho mạch logic
Bảng 5. Bảng mô tả chân modul điều khiển
Nguyên lý sử dụng driver điều khiển động cơ : Dựa trên cấu trúc Cầu H (H-Bridge) kép,
cho phép đảo chiều dòng điện qua động cơ DC để thay đổi hướng quay, kết hợp
dùng PWM (xung rộng biến đổi) để điều chỉnh tốc độ, thông qua các chân điều khiển
như IN1/IN2 (hoặc IN3/IN4) và ENA/ENB, giúp điều khiển độc lập hai động cơ hoặc một động cơ bước.
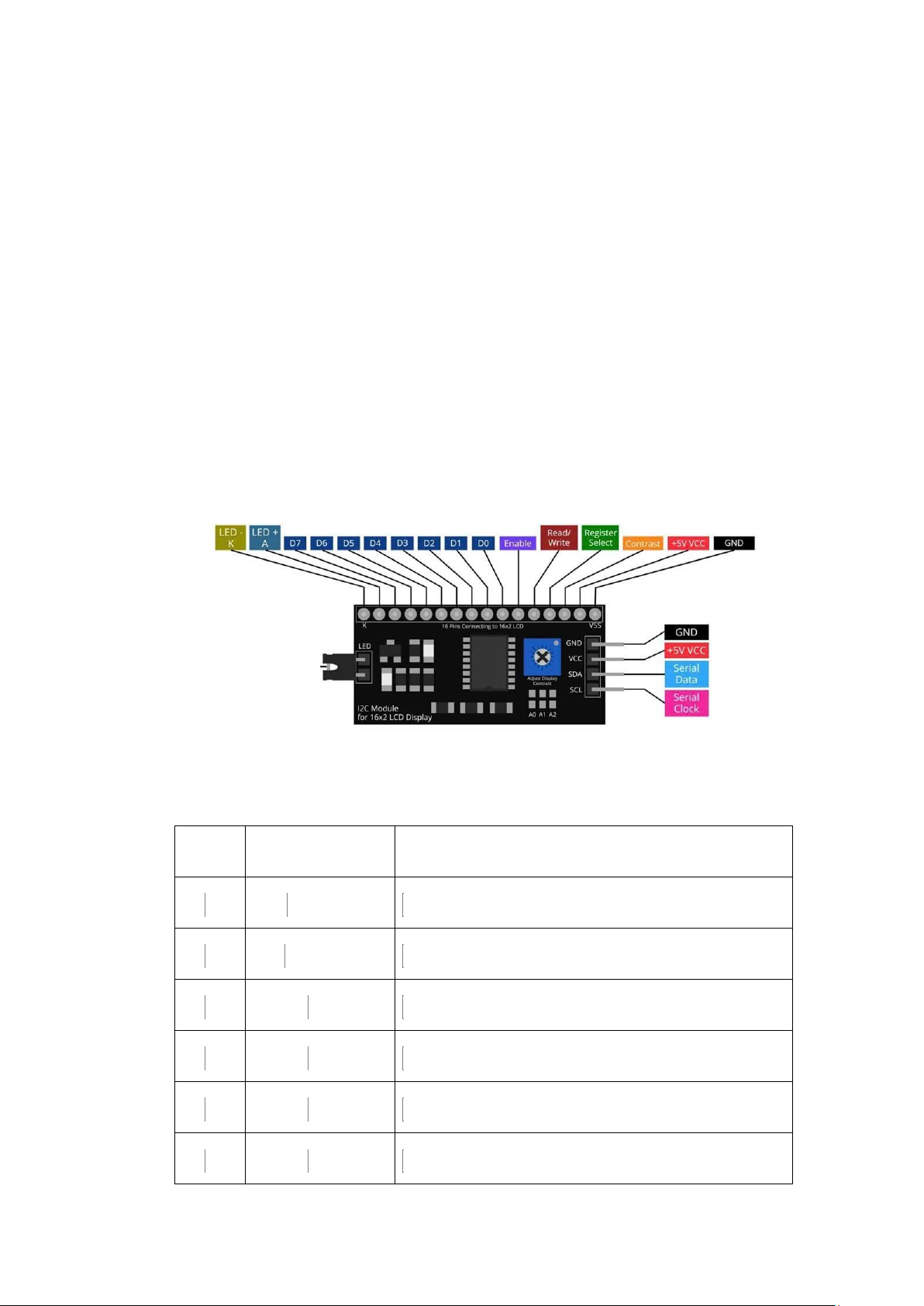
2.2.4 Thiết bị truyền thông a) Modul I2C Hình 2.11. Modul I2C Mục đích sử dụng:
- Tiết kiệm chân: Giảm số chân kết nối với vi điều khiển (ví dụ: từ 6–8 chân xuống còn 2 chân đối với LCD). 13
- Đơn giản hóa việc đi dây: Giúp mạch gọn gàng và giảm sai sót khi đấu nối.
- Kết nối nhiều thiết bị: Cho phép nhiều linh kiện (cảm biến, màn hình…) dùng chung
một đường truyền dữ liệu duy nhất.
- Dễ điều khiển: Tích hợp sẵn linh kiện phụ trợ (như biến trở chỉnh độ nét) trên cùng một mạch nhỏ. Thông số kỹ thuật:
- Điện áp hoạt động: 2.5v-6v
- Jump chốt: Cung cấp đèn cho LCD hoặc ngắt
- Biến trở xoay độ tương phản cho LCD
- Kích thước: 41,5 mm ×19 mm ×15,3 mm - Trọng lượng: 5g
Hình 2.12.Sơ đồ chân LCD giao tiếp I2C Bảng mô tả các chân STT Tên chân
Chức năng của chân 1 LED -K
Cực âm của đèn nền (Backlight). 2 LED +A
Cực dương của đèn nền (Backlight). 3 D7 Chân truyền dữ liệu 4 D6 Chân truyền dữ liệu 5 D5 Chân truyền dữ liệu 6 D4 Chân truyền dữ liệu 14 STT Tên chân
Chức năng của chân 7 D3 Chân truyền dữ liệu 8 D2 Chân truyền dữ liệu 9 D1 Chân truyền dữ liệu 10 D0 Chân truyền dữ liệu 11 Enable
Chân cho phép chốt dữ liệu vào LCD.
Chế độ Đọc/Ghi (thường module I2C luôn để 12 Read/Write ở mức thấp để Ghi). 13
Register Select Lựa chọn thanh ghi (Lệnh hoặc Dữ liệu).
Điều chỉnh độ tương phản (nối với biến trở 14 Contrast trên module). 15 +5V VCC
Chân cấp nguồn dương cho module và LCD 16 GND
Chân nối cực âm của nguồn điện (0V).
Đường truyền dữ liệu nối tiếp theo giao thức 17 Serial Data I2C.
Đường truyền tín hiệu xung nhịp để đồng bộ 18 Serial Clock hóa dữ liệu.
Bảng 6. Bảng mô tả chân lcd giao tiếp I2C
2.2.5 Bộ điều khiển trung tâm
a) Tính toán số lượng tín hiệu vào ra cho bộ điều khiển trung tâm
Tín hiệu ngõ vào của bộ điều khiển 15 Kiểu tín hiệu STT Tên đầu vào
Số lượng chân cần thiết
(Tín hiệu số/ tương tự) 1 Cảm biến siêu âm Số 1 2 Nút Bấm Số 7 3 Modul L298N Số 9 4 LCD Số 2
Tổng số lượng chân 19
Bảng 7. Bảng chân tín hiệu ngõ vào của bộ điều khiển
Tín hiệu ngõ ra của bộ điều khiển Kiểu tín hiệu
Số lượng chân cần STT Tên đầu ra
(Tín hiệu số/ tương thiết tự) Cảm biến siêu âm HC- 1 Số 1 SR04 2 Encoder Số 4
Tổng số lượng chân 5
Bảng 8. Bảng chân tín hiệu ngõ ra của bộ điều khiển
Tín hiệu truyền thông của bộ điều khiển Kiểu tín hiệu
STT Tên truyền thông
Số lượng chân cần thiết
(Tín hiệu số/ tương tự) 1 I2C Số 2
Tổng số lượng chân 2
Bảng 9. Bảng Tín hiệu truyền thông của bộ điều khiển
Tổng hợp số lượng tín hiệu vào ra 16 STT Kiểu tín hiệu
Số lượng chân cần thiết 1 Tín hiệu vào số 19 2 Tín hiệu ra số 5 3 Tín hiệu vào tương tự 0 4 Tín hiệu ra tương tự 0 5 Truyền thông 2
Tổng số lượng chân 26
Bảng 10. Bảng tổng hợp số lượng tín hiệu vào ra
Với yêu cầu của hệ thống cần xử lý 19 tín hiệu đầu vào và 5 tín hiệu đầu ra, Arduino
Mega sử dụng vi điều khiển ATmega2560 được lựa chọn làm bộ điều khiển trung tâm
vì đáp ứng tốt cả về phần cứng lẫn khả năng mở rộng. ATmega2560 có số lượng chân
vào/ra rất lớn (lên đến 54 chân digital và 16 chân analog), cho phép kết nối trực tiếp
nhiều cảm biến, nút nhấn, encoder và các tín hiệu phản hồi mà không cần sử dụng thêm
IC mở rộng I/O, từ đó làm giảm độ phức tạp của mạch và tăng độ tin cậy của hệ thống.
Bên cạnh đó, Arduino Mega hỗ trợ nhiều ngắt ngoài và timer phần cứng, rất phù hợp
cho các ứng dụng điều khiển cần độ chính xác cao về thời gian như đọc xung encoder,
xử lý tín hiệu cảm biến theo thời gian thực và điều khiển động cơ. Vi điều khiển
ATmega2560 còn có dung lượng bộ nhớ lớn (Flash, SRAM và EEPROM), đủ để lưu
trữ chương trình dài, các thuật toán điều khiển, giao diện hiển thị trên LCD cũng như
các tham số vận hành của hệ thống.
Tối ưu hóa tài nguyên I/O: Với 54 chân Digital I/O, Mega 2560 không chỉ đáp ứng hoàn
hảo nhu cầu 29 chân tín hiệu hiện tại mà còn tạo ra dư địa an toàn cho việc mở rộng các
tính năng giám sát hoặc bảo vệ trong tương lai.
Ngoài ra, Arduino Mega được tích hợp nhiều chuẩn giao tiếp truyền thông như UART,
I2C và SPI, giúp dễ dàng kết nối với các thiết bị ngoại vi như LCD, module truyền thông
hoặc các mạch điều khiển mở rộng, đồng thời thuận lợi cho việc giám sát và debug trong 17