Thuyết Trình Máy Đo Tốc Độ - Quản lý hàng hải | Trường Đại học Giao thông Vận Tải
Thuyết Trình Máy Đo Tốc Độ - Quản lý hàng hải | Trường Đại học Giao thông Vận Tải được được sưu tầm và soạn thảo dưới dạng file PDF để gửi tới các bạn sinh viên cùng tham khảo, ôn tập đầy đủ kiến thức, chuẩn bị cho các buổi học thật tốt. Mời bạn đọc đón xem!
Môn: Quản lý hàng hải 15 tài liệu
Trường: Trường Đại học Giao thông vận tải 487 tài liệu
Tác giả:















Preview text:
lOMoAR cPSD| 15962736
TRƯỜNG ĐẠI HỌC GIAO THÔNG VẬN TẢI THÀNH PHỐ HỒ CHÍ MINH VIỆN HÀNG HẢI BÀI THẢO LUẬN
Môn: Thiết bị kỹ thuật hàng hải CHUYÊN ĐỀ
MÁY ĐO TỐC ĐỘ TRÊN TÀU THỦY
Nhóm thực hiện: Nhóm 6 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ MỤC LỤC CHƯƠNG 1
TỔNG QUAN VỀ MÁY ĐO TỐC ĐỘ TÀU THỦY .................................................. 5
1.1 Giới thiệu khái quát: ................................................................................... 5
1.2 Phân loại: .................................................................................................... 5 CHƯƠNG 2
MÁY ĐO TỐC ĐỘ THEO NGUYÊN LÝ CẢM ỨNG TỪ ....................................... 7
2.1 Cấu tạo của máy o tốc ộ cảm ứng từ: ...................................................... 7
2.1.1 Khái niệm: .......................................................................................... 7
2.1.2 Cấu tạo:............................................................................................... 7
2.1.3 Sơ ồ khối tổng quát của máy o tốc ộ cảm ứng từ: .......................... 8
2.2 Nguyên lý hoạt ộng của máy o tốc ộ cảm ứng iện từ: .......................... 8
2.3 Sai số của tốc ộ kế cảm ứng iện từ: ......................................................... 9
2.3.1 Sai số cố ịnh ...................................................................................... 9
2.3.2 Ảnh hưởng của tàu lắc: ....................................................................... 9
2.3.3 Sai số do dòng chảy rối loạn tạo ra: ..................................................... 9
2.3.4 Sai số do ộ mặn của nước biển: ......................................................... 9
2.3.5 Sai số do thay ổi tính chất vật liệu gây ra : ...................................... 10 CHƯƠNG 3
MÁY ĐO TỐC ĐỘ THEO NGUYÊN LÝ DOPPLER ............................................ 11
3.1 Cơ sở lí thuyết: ......................................................................................... 11
3.2 Nguyên lí hoạt ộng: ................................................................................ 12
3.2.1 Hiệu ứng Doppler: ............................................................................ 12
3.2.2 Nguyên lí hoạt ộng của máy o tốc ộ bằng hiệu ứng Doppler : ...... 12
3.3 Phân loại máy o tốc ộ theo hiệu ứng Doppler: ....................................... 13
3.3.1 Tốc ộ kế Doppler một tia:................................................................ 13
3.3.2 Tốc ộ kế Doppler hai tia: ................................................................. 13 3.3.3
Tốc ộ kế Doppler 4 tia: .................................................................... 14
3.4 Các sai số của tốc ộ kế: .......................................................................... 16
3.4.1 Sai số do tàu lắc ................................................................................ 16
3.4.2 Sai số do tần số phát thay ổi ............................................................ 16 3.4.3
Sai số do tốc ộ truyền âm của sóng âm trong nước biển: ................. 16
3.4.4 Ảnh hưởng của ộ sâu áy biển: ....................................................... 16 2 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ CHƯƠNG 4
CÁC PHƯƠNG THỨC PHÁT SÓNG ..................................................................... 17
4.1. Phương thức phát sóng liên tục (CW- Continuous Wave) ........................ 17
4.2. Phương thức phát sóng xung .................................................................... 17
4.3. So sánh hai phương thức phát sóng CW và sóng xung : ........................... 17
CHƯƠNG ..................................................................................................................................... 2
CÁC QUY ĐỊNH LIÊN QUAN ĐẾN MÁY ĐO TỐC ĐỘ .................................................... 18
5.1 Việc trang bị thiết bị o tốc ộ trên biển phải tuân thủ các yêu cầu sau: ................... 18
5.2 Kết cấu và lắp ặt của thiết bị: ................................................................................. 18
5.3 Khả năng làm việc trong các iều kiện môi trường khác nhau: ............................... 19
5.4 Nguồn cấp ............................................................................................................... 19
5.5 Nhãn mắc và nhận dạng .......................................................................................... 20 CHƯƠNG 6
KHAI THÁC SỬ DỤNG THIẾT BỊ ĐO TỐC ĐỘ .................................................. 20 3 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
THÀNH VIÊN NHÓM VÀ NỘI DUNG THẢO LUẬN
1. NGUYỄN TUYẾT NHUNG - NỘI DUNG 1 2.
VÕ THỊ TRƯỜNG NGHI - NỘI DUNG 2
3. NGUYỄN HỮU NHẬT - NỘI DUNG 3
4. HUỲNH VIỆT NHẬT - NỘI DUNG 4
5. NGÔ HỒNG NHUNG - NỘI DUNG 5
6. DƯƠNG AN NINH -NỘI DUNG 6 4 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ CHƯƠNG 1:
TỔNG QUAN VỀ MÁY ĐO TỐC ĐỘ TÀU THỦY
1.1 Giới thiệu khái quát:
• Tốc ộ kế trên tàu thủy (Speed log) ược dùng ể o tốc ộ tàu chạy và o lộ
trình(tích lũy hành trình) của tàu,là một thiết bị không thể thiếu khi tàu hoạt
ộng.Tốc ộ tàu là một thông số quan trọng trong iều khiển tàu.Thông tin về
tốc ộ tàu không những giúp người iều khiển có khả năng xử lí các tình
huống, mà nó còn là tín hiệu ầu vào cho các thiết bị hàng hải khác phục vụ công tác dẫn tàu.
• Tốc ộ chuyển ộng của tàu trên biển ược tính bằng ơn vị hải lý/giờ (knots)
• Thông thường khi nói ến tốc ộ tàu,người ta hiểu rằng ó là tốc ộ theo chiều
dọc tàu.Khi có thể xác ịnh ược tốc ộ dịch chuyển theo chiều ngang hoặc tốc
ộ quay của mũi hay lái tàu thì các thông tin cần ược thể hiện rõ ràng. 1.2 Phân loại:
Tốc ộ kế tương ối( STW- Speed Through Water) : là tốc ộ kế chỉ o ược tốc ộ của
tàu tương ối với mặt nước.Để có thể xác ịnh tốc ộ tương ối của tàu,người ta sẽ
dùng một số loại tốc ộ kế sau:
• Tốc ộ kế thủy lực:dựa trên cơ sở o áp lực tĩnh và ộng của dòng nước chảy quanh
tàu khi tàu chuyển ộng ể xác ịnh tốc ộ tàu.
• Tốc ộ kế kéo dây: là loại tốc ộ kế ơn giản ược sử dụng sớm nhất trên tàu, dùng
dây ể kéo chân vịt, vòng quay của chân vịt qua dây kéo truyền về thiết bị o ể xác
ịnh tốc ộ của tàu. Tuy nhiên ộ chính xác không cao, nhưng cấu tạo ơn giản, ngày
nay vẫn còn ược sử dụng như là những thiết bị dự phòng.
• Tốc ộ kế cảm ứng từ: Từ thế kỷ 60,người ta bắt ầu sử dụng loại tốc ộ kế iện từ
dựa trên nguyên lý cảm ứng iện từ và sự hỗ trợ của công cụ iện tử ể o tốc ộ và lộ
trình.Loại tốc ộ kế này có ưu iểm là phạm vi của tốc ộ o lớn,có thể o ược tốc ộ lùi
của tàu, ộ chính xác khá tốt và sử dụng ơn giản.Đến nay,tốc ộ kế loại này vẫn ược
sử dụng rộng rãi trên tàu.
Tốc ộ kế tuyệt ối (SOG- Speed Over Ground): là máy o tốc ộ của tàu so với áy
biển.Loại tốc ộ kế này khi hoạt ộng trong phạm vi ộ sâu truy theo nào ó có thể o
ược tốc ộ tương ối so với áy biển.Nhưng khi ộ sâu vượt qua phạm vi ộ sâu truy
theo thì chuyển thành phương thức o sâu truy theo tầng nước,tức là chỉ o ược tốc
ộ tương ối với nước.Từ những năm 70 của thế kỉ trước, ể áp ứng nhu cầu quân sự 5 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
và ngành vận tải biển hiện ại, kích cỡ tàu ngày càng lớn, giải quyết các khó khăn
về iều ộng tàu, ặc biệt là cặp và rời cầu, qua các luồng hẹp...Vì thế trên các tàu ã
bắt ầu sử dụng tốc ộ kế Doppler ể o tốc ộ.
• Tốc ộ kế Doppler: người ta tiến hành o tần số của tín hiệu phát i và tín hiệu
thu ược sau khi phản xạ từ áy biển trở về.Sự chênh lệch giữa tần số phát và
thu tỉ lệ với tốc ộ tàu, và do ó ta xác ịnh ược tốc ộ tàu chạy. Ưu iểm của loại
này là có ộ chính xác cao, o ược tốc ộ tiến,tốc ộ lùi,tốc ộ dịch chuyển ngang...
• Tốc ộ kế tương quan thủy âm: o tốc ộ bằng cách xử lý thông tin sóng âm
dựa trên nguyên lý kĩ thuật tương quan.Ưu iểm nổi bật của nó là ộ chính xác
của tốc ộ o ược không chịu ảnh hưởng của tốc ộ sóng âm trong nước,vừa o
tốc ộ vừa o ược ộ sâu. 6 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ CHƯƠNG 2
MÁY ĐO TỐC ĐỘ THEO NGUYÊN LÝ CẢM ỨNG TỪ
2.1 Cấu tạo của máy o tốc ộ cảm ứng từ:
2.1.1 Khái niệm:
-Tốc ộ kế cảm ứng từ ( Electromagnetic Log) là thiết bị vận dụng nguyên lý cảm ứng
iện từ ể o tốc ộ tức thời của tàu tương ối với nước và phân tích tốc ộ ể xác ịnh quãng ường tàu chạy (lộ trình).
2.1.2 Cấu tạo:
-Thiết bị tốc ộ kế iện từ gồm có 3 bộ phận chính: khối cảm biến,khối trung tâm và khối hiển thị.
+ Khối cảm biến của tốc ộ kế là hình trụ, có tiết diện là dạng khí ộng học bằng ồng
thau 1 mặt ngoài có phủ lớp cách iện, nhô ra dưới áy tàu. Phía trong hình trụ 1 có gắn một
thanh xolenôit 2 xung quanh có quấn hai cuộc dây: cuộn chính ω và cuộn cân bằng ωk ,
dòng iện xoay chiều i qua cuộn w. Nhờ vậy mà xung quanh thanh xolinôit hình thành một
iện từ trường mạnh. Bên mặt ngoài hình trụ có gắn hai iện cực A và B người ta nối hai
iện cực này với hai sợ dây ưa ra ngoài. Bộ phận nhạy cảm ược thiết kế dễ dàng ưa ra khỏi áy tàu. 7 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
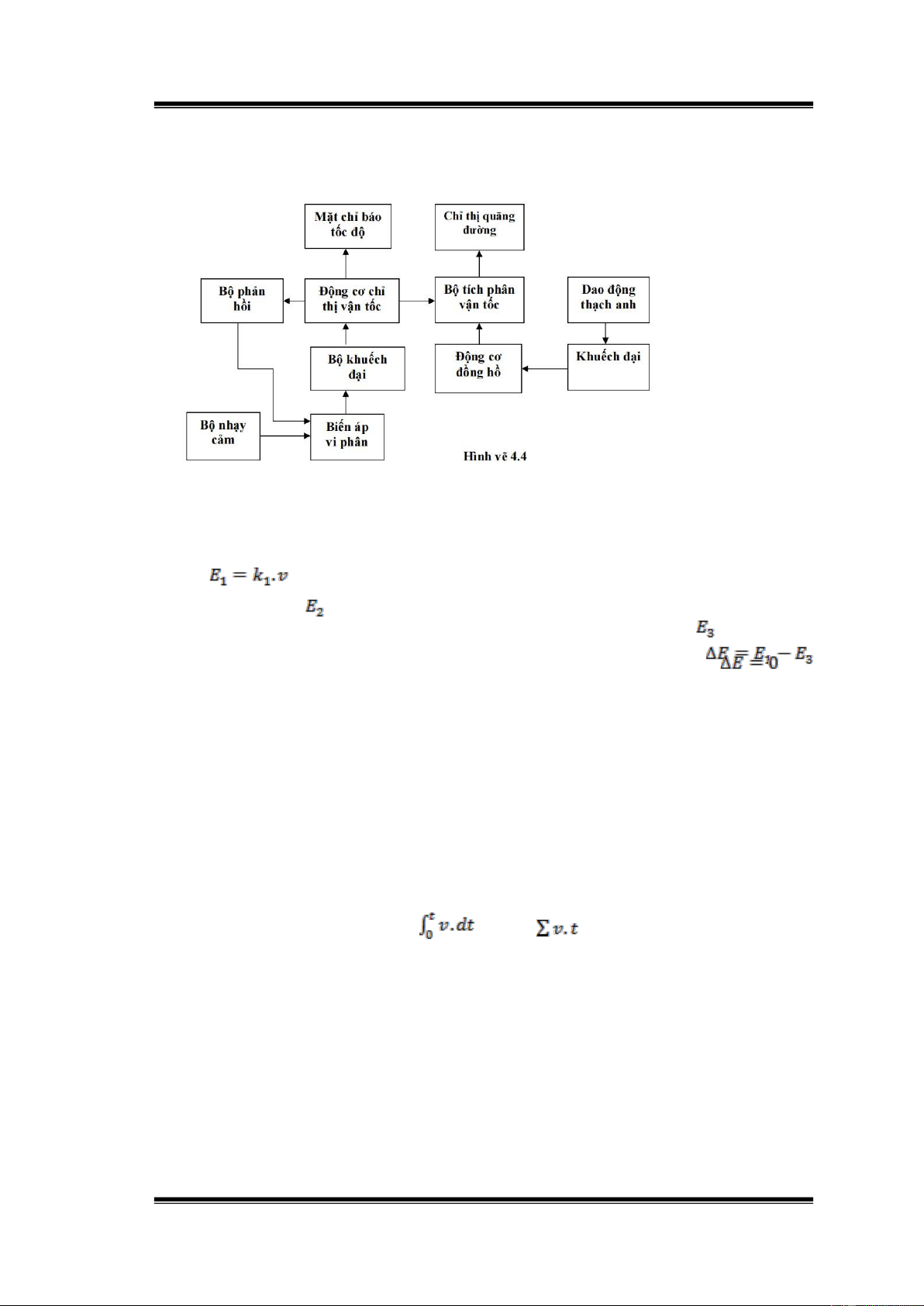
2.1.3 Sơ ồ khối tổng quát của máy o tốc ộ cảm ứng từ:
• Khi tàu chạy với tốc ộ v,thì dòng nước chuyển dộng dưới áy tàu có tốc ộ là – v
(nếu không có sai số).Lúc này suất iện ộng ra từ bộ phận nhạy cảm
.Suất iện ộng này sau khi ưa qua bộ vi phân và bộ khếch ại sẽ cho ra
suất iện ộng . Suất iện ộng này dduojc ưa ến ộng cơ chỉ thị ể ưa ra mặt chỉ báo
tốc ộ và ưa qua bộ phận phản hồi,ta ược .Lúc này ầu vào của biến áp vi phân xuất
hiện một xuất iện ộng tổng hợp .Bộ chỉ thị vận tốc ngừng quay khi .
• Lúc này tốc ộ báo trên máy không ổi,chính bằng tốc ộ tàu chạy ( giả thiết ặt ra không có dòng hải lưu).
• Để có ược quãng ường,từ ộng cơ chỉ thị vận tốc, tín hiệu vận tốc ược ưa vào bộ
phận phân tích vận tốc cùng với thòi gian ược lấy từ ọng cơ ồng hồ ( nguồn nuôi
ồng hồ là bộ phận thạch anh và bộ khếch ại), do ó ta có bộ tích phân là tích phân
xác ịnh, và quãng ường tàu chạy ược trong thời gian t là: S= hay S=
Từ ây tín hiệu ược ưa ra bộ phận chỉ báo,cho ta biết ược quãng ường mà tàu chạy.
2.2 Nguyên lý hoạt ộng của máy o tốc ộ cảm ứng iện từ:
Người ta ưa bộ phận nhạy cảm nhô ra khỏi áy tàu tiếp xúc với nước ngoài mạn tàu,
khi ó nước là chất dẫn iện nên các iện cực A và B ở mặt ngoài của ống hình trụ sẽ hình
thành vòng dẫn iện 3 ( óng vai trò như dây dẫn).Nếu cuộn dây có iện thì theo ịnh luật cảm
ứng Fara ây thì trong vòng dẫn iện 3 có suất iện ộng bằng E. *Nguyên lý o tốc ộ và
góc dạt của tàu bằng cảm ứng iện từ : 8 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
• Dưới áy tàu người ta ặt một bộ nhậy cảm có 2 cực chéo nhau, iện áp của 2 cực thứ
1 và 3 là U1 iện áp ra của cặp cực thứ 2 và 4 là U2, ở giữa bộ phận nhạy cảm có một nam châm xoay chiều.
• Vì vậy, tốc ộ kế cảm ứng có thể o ược góc dạt và tốc ộ toàn phần vc của tàu ối với nước.
2.3 Sai số của tốc ộ kế cảm ứng iện từ:
2.3.1 Sai số cố ịnh: khi tàu không chạy,thì ở ầu ra cặp cực tồn tại giá trị , giá trị này
thay ổi theo thời gian. Có 2 phương pháp ể loại bỏ :
• Phương pháp 1: Khi tàu chưa chạy thì mặt chỉ báo tốc ộ sẽ cho ta một giá trị nào
ó,ta chỉ cần chỉnh ể kim chỉ về vị trí số 0 là ược.Phương pháp này ơn giản và ược sử dụng phổ biến.
• Phương pháp 2: Trong chế tạo,người ta tính ược giá trị ,và loại trừ giá trị này bằng cách ưa cuộn
vào thanh xolenoit 2, sau ó ưa vào cuộn dây này một iện
áp xoay chiều ,kí hiệu là , iện áp phải ược tính toán sao cho nó tạo ra một suất
iện ộng có ộ lớn úng bằng nhưng ngược dấu.
2.3.2 Ảnh hưởng của tàu lắc: Tốc ộ kế cảm ứng từ rất nhạy cảm ,vì vậy kim
chỉ tốc ộ lúc tàu lắc có tể dao ộng với biên ộ 0,1- 1 hải lí.Nhu vậy ta không thể ọc
ược chỉ số một cách chính xác.Cách tốt nhất là ta ọc giá trị cực ại và giá trị cực
tiểu,sau ó lấy trung bình. Có thể khử sai số bằng cách lắp thêm bộ phận làm thay
ổi từ trường ồng bộ với tàu lắc.
2.3.3 Sai số do dòng chảy rối loạn tạo ra: khi tàu chuyển ộng tạo ra một lớp
nước chuyển ộng rối loạn dưới áy tàu mà vận tốc của lớp nước này không thể xác
ịnh ược.Độ dày của lớp nước phu thuộc vào từng vị trí của vỏ tàu và tốc ộ chuyển
ộng của tàu.Do vậy vận tốc thực tế sẽ khác với vận tốc thực tế.
2.3.4 Sai số do ộ mặn của nước biển: Theo nguyên lý hoạt ộng của máy o
tốc ộ cảm ứng thì nước biển óng vai trò như 2 nửa vòng dây dẫn bao quanh thiết
diện của bộ phận nhạy cảm i qua hai iện cực A và B.Nếu ta gọi R là iện trở của chất lỏng,ta có: R= (1) Trong ó:
S là thiết diện của bộ phận nhạy cảm i qua hai cực. 9 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
L là chu vi của bộ phận nhạy.
là iện trở suất của nước biển.
Trong ct (1),L và S là không ổi ối với bộ nhạy cảm, hoàn toàn phụ thuộc vào ộ
mặn.Thực nghiệm cho thấy ộ mặn càng cao thì ộ chính xác khi o tốc ộ càng cao và ngược
lại.Do vậy khi tàu hoạt ộng ở vùng nước ngọt thì tốc ộ o ược kém chính xác.
2.3.5 Sai số do thay ổi tính chất vật liệu gây ra : Theo thời gian từ tính của nam châm
sẽ thay ổi, mặt khác sự xâm thực bề mặt ngoài của hai bản cực A và B nên hệ số cảm ứng
thay ổi so với thiết kế ban ầu do ó chỉ thị vận tốc và quãng ường sai số so với thực tế. CHƯƠNG 3
MÁY ĐO TỐC ĐỘ THEO NGUYÊN LÝ DOPPLER 10 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
3.1 Cơ sở lí thuyết:
Trường hợp 1: Người ta ặt máy phát trên một vật chuyển ộng chạy tới gần vật cố ịnh.
Giả sử nguồn phát ban ầu có hàm sóng là: =φ0.sin2πf0t Trong ó:
• f là tần số phát ban ầu. • t là thời gian.
Khi sóng phát ra ập vào vật cố ịnh phản xạ trở lại máy thu có hàm sóng là:
0.sin2 f0 t t ( Giả sử không có tổn hao). Trong ó:
• ∆t=2D/C là khoảng thời gian sóng phát i cho ến khi sóng phản xạ trở lại máy thu ( ơn vị là giây).
• D là khoảng cách giữa máy thu, phát và vật cố ịnh.
• C là vận tốc truyền sóng.
Như vậy ta có pha dao ộng tại máy thu là: 1 2 f0 T 2CD
Theo vật lý, ạo hàm pha dao ộng sóng tại một thời iểm bằng tần số góc của hàm sóng tại thời iểm ó, nên ta có: d 1 2 f0 1 2dD 1 2 f1 (*) dt C dt.
Trong ó: =v là vận tốc chuyển ộng của vật ặt máy thu sóng.
Từ công thức(*) ta có : f 0(1 2v) f 1 suy ra v
( f 1 f 0).C C f. (**) C 2 f 0 2 f 0
Trường hợp 2: Vật ặt máy thu phát chuyển ộng ra xa vật cố ịnh.Ta có: v= C. f (***) 2 f0 11 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
Trường hợp 3:Hướng phát sóng hợp với phương chuyển ộng một góc ,từ công thức ta có:
v.cos = C. f 2 f0 v = C f. 2 f0.cos
3.2 Nguyên lí hoạt ộng:
3.2.1 Hiệu ứng Doppler:
Khi một máy phát ặt trên một nền cố ịnh phát sóng vào một vật ang chuyển ộng hoặc
máy phát ặt trên một nền di ộng phát sóng vào một vật ang chuyển ộng, lúc ó o ạc tần số
thu thì ta thu ược tần số thu khác so với tần số phát một ại lượng là ∆f =f1-f0 (khác 0).
Đây chính là hiệu ứng Doppler về sự thay ổi tần số sóng, ược áp dụng trong các máy o vận tốc.
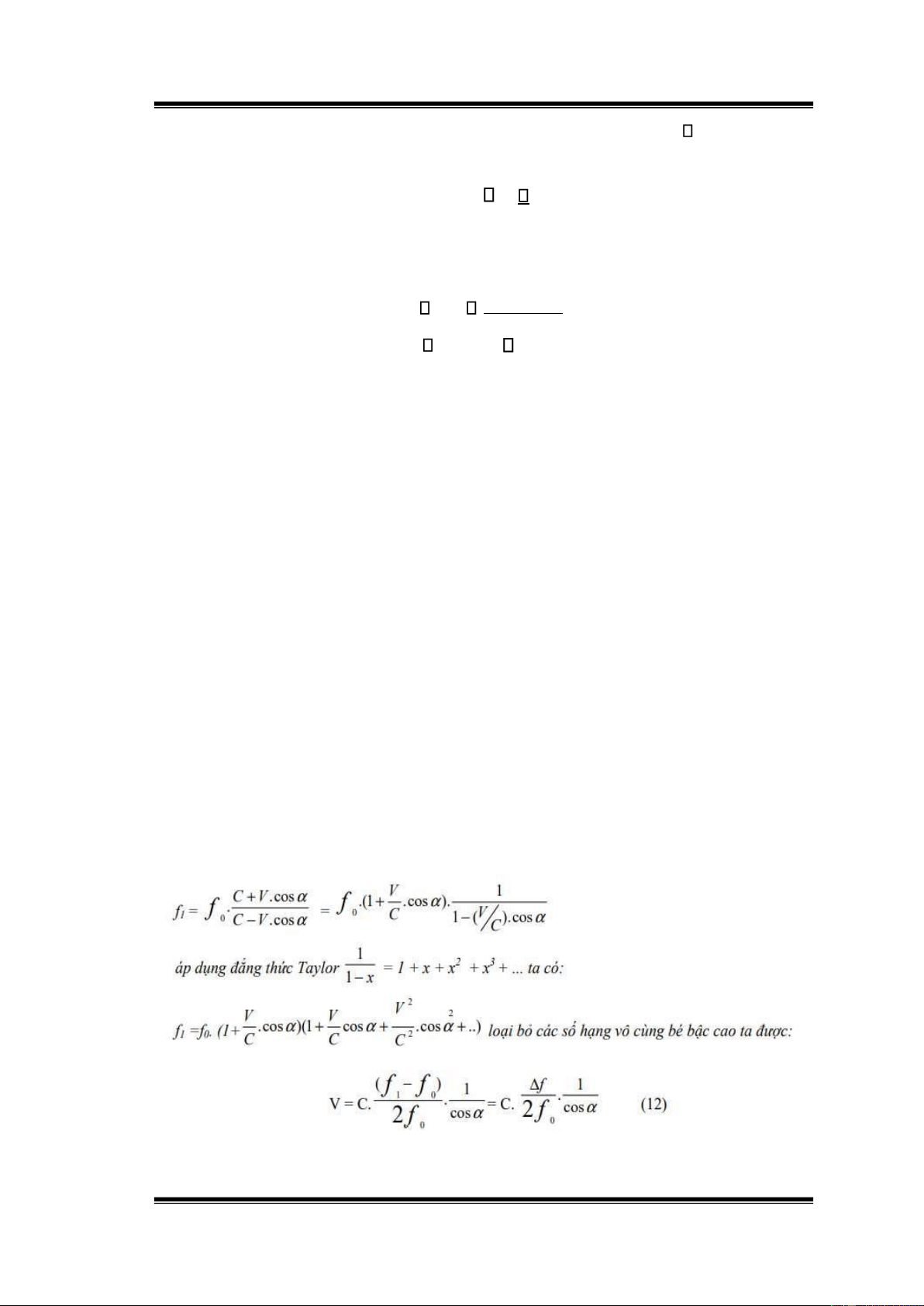
3.2.2 Nguyên lí hoạt ộng của máy o tốc ộ bằng hiệu ứng Doppler :
Ở dưới áy tàu người ta ặt một màng dao ộng thu phát sóng siêu âm và phát chéo về
phía mũi hoặc phía lái hợp với mặt phẳng ường nước một góc α cố ịnh, tần số phát sóng
siêu âm là f0, thu ược tần số phản xạ trở về áy biển là f1. Tốc ộ của tàu ược tính theo công thức sau:
Theo hiệu ứng Doppler ta có: giả sử màng phát và thu tiến ến iểm 0 với cùng vận tốc v.cosα ta có : 12 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
Nhìn vào công thức (12) ta thấy :
• C là vận tốc siêu âm trong môi trường nước biển là 1500m/s. • góc α không ổi.
Vậy muốn o tôc ộ của tàu ta chỉ cần o sự lệch tần số giữa iểm phát và thời iểm thu sóng siêu âm (∆f) là xong.
3.3 Phân loại máy o tốc ộ theo hiệu ứng Doppler:
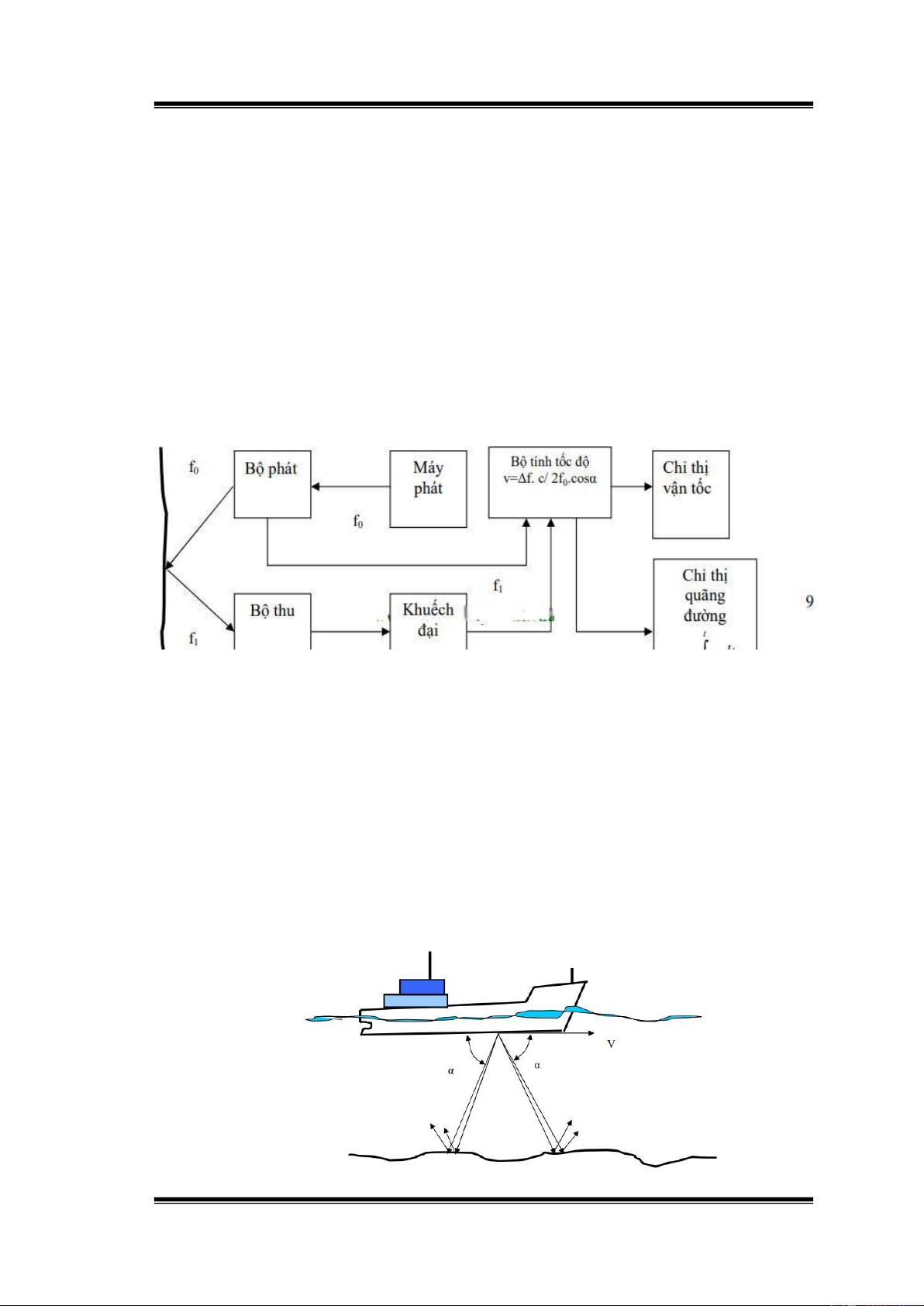
3.3.1 Tốc ộ kế Doppler một tia: Nhìn vào sơ ồ ta thấy:
Máy phát sẽ phát một tần số siêu âm là f0 i qua môi trường nước biển với trung gian
là bộ phát. Sau khi vào môi trường nước biển, tần số sẽ bị phản xạ trở lại với tần số là f1
và i vào bộ thu. Tại ây, tần số f1 sẽ chuyển ến bộ khuếch ại và cùng với tần số f1 của bộ
phát ược xử lí tại bộ tính tốc ộ với công thức: v=∆f.c/2f0.cosα. Sau khi ã có ược vận tốc
của tàu, bộ tính vận tốc sẽ chỉ thị vận tốc tàu và quãng ường mà tàu i ược sau thời gian t(s).
3.3.2 Tốc ộ kế Doppler hai tia: 13 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
• Để giảm sai sót khi góc α thay ổi do tàu lắc ( ặc biệt là lắc dọc), ồng thời nâng cao
chính xác khi o tốc ộ tàu. Người ta phát một tia thứ hai về phía ối xứng với tia thứ
nhất qua mặt phẳng ngang trong mặt phẳng trục dọc của tàu.
• Trong phương pháp này, cả hai bộ phát cùng phát với tần số f0 và tần số thu ược ở
phía mũi là f1, ở phía lái là f’1. Ta có:
Trong ó, cosα = (cosαm + cosα1)/2
Nhìn vào công thức (13), ta thấy chỉ cần o tần số của sóng phản xạ phía mũi và phía lái
là tính ngay ược tốc ộ chuyển ộng của tàu.
3.3.3 Tốc ộ kế Doppler 4 tia: 14 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
Trong máy o tốc ộ 4 tia, các tia âm truyền theo hướng hợp với mặt phẳng trục dọc của tàu
một góc θ. Tàu có ộ dạt là β. Tất cả các biến số Φ1, Φ2, Φ3, Φ4 ược chiếu lên hướng HTTβ,
xét 4 lần o riêng rẽ nhau ta có:
α là góc hợp bởi mặt phẳng i qua chùm tia 1,2 (về phía mũi) và chùm tia 3,4 (về phía lái)
và mặt phẳng ường nước.
Sau ó, ta lấy hiệu cảu biến số Doppler tia 1 và 3, 2 và 4 ta có:
Ta tính tổng và hiệu theo công thức (15), ta có : Từ ây ta ược:
Công thức (16) cho phép ta xác ịnh ược vận tốc thật của tàu so với áy biển và góc dạt thực tế của tàu. 15 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
3.4 Các sai số của tốc ộ kế:
3.4.1 Sai số do tàu lắc: Khi tàu lắc góc α thay ổi dẫn ến vận tốc chỉ báo trên máy cũng thay
ổi theo, ặc biệt là khi tàu lắc dọc. Để giảm sai số này thì góc α ≤ 750 .
3.4.2 Sai số do tần số phát thay ổi: Yêu cầu trong chế tạo máy phát phải tạo ra một
tần số f0 bằng một hằng số, nhưng do lão hóa linh kiện của máy phát, màng dao ộng phát
và các linh kiện bán dẫn theo thời gian dẫn ến chỉ số vận tốc báo trên máy có sai số. Để
khắc phục sai số này, người ta ưa vào máy o tốc ộ một bộ phận tự ộng iều chỉnh tần số (
Automatic Frequency Control).
3.4.3 Sai số do tốc ộ truyền âm của sóng âm trong nước biển:Trong tính toán C
lấy giá trị xấp xỉ bằng 1500m/s, nhưng trong thực tế C=f(S‰, t0, P, H..),trong ó S‰ là ộ
mặn nước biẻn, H là ộ sâu.Trong máy o tốc ộ dùng trong hàng hải sẽ bỏ qua biến thiên về tốc ộ truyền âm.
3.4.4 Ảnh hưởng của ộ sâu áy biển: Khi sóng siêu âm lan trong nước biển bị tổn hao
năng lượng rất lớn. Tần số càng cao thì sự hao phí càng cao. Đối với máy o tốc ộ Doppler
tần số phát thông thường từ 1-> 3 MHz, tương ương tín hiệu phản xạ về màng dao ộng là
30⁒ năng lượng ở ộ sâu 50m cho ộ chính xác cao. Ngày nay, máy o tốc ộ Doppler ã ược
chế tạo có thể o ở ộ sâu 1500m . Nếu lớn hơn nữa thì cường ộ sóng phản xạ về màng dao
ộng thu yếu dẫn ến tốc ộ kém chính xác. CHƯƠNG 4
CÁC PHƯƠNG THỨC PHÁT SÓNG
4.1. Phương thức phát sóng liên tục (CW- Continuous Wave) 16 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
• Mỗi một vị trí dùng hai bộ tạo dao ộng, một bộ phát năng lượng sóng âm còn bộ
kia thì thu sóng phản hồi. Năng lượng thu ược là sóng phản hồi từ áy biển hoặc
sóng phản hồi vượt qua ộ sâu xác ịnh nào.
• Sóng liên tục CW sẽ phát sinh vấn ề khi hoạt ộng với ộ sâu lớn vì tia phát bị tán
xạ do số lượng mỗi lúc một tăng lên của các chất iểm (hạt li ti) trong nước. Ngoài
năng lượng phản xạ từ tầng nước ( khối lượng nước), phần năng lượng bị tán xạ
từ chất iểm cũng quay về bộ tạo dao ộng thu. Khi sóng phản hồi từ tầng nước quay
về trở nên yếu thì sóng tán xạ của chất iểm sẽ làm rối loạn tín hiệu thu, lúc này chỉ
báo tốc ộ có thể bằng không. Vì lý do ó mà sóng liên tục ít ược sử dụng trong thiết bị này.
4.2. Phương thức phát sóng xung
• Để khắc phục trở ngại của hệ thống phát sóng CW. người ta sử dụng sóng xung.
Cũng giống như máy o sâu. khi bộ tạo dao ộng phát i xung năng lượng cao thì máy
thu óng lại. Khi sóng phân hồi quay về trên cùng một bộ dao ộng thì mạch iện
chuyển sang chế ộ thu. Bằng cách này, ngoài lợi ích khắc phục vấn ề mất tín hiệu
như ã nói ở trên, còn một lợi ích nữa là chỉ cần một bộ tạo dao
• ộng cho cả thu lẫn phát. Nên nhớ rằng, tốc ộ kế Doppler hoạt ộng theo nguyên lý
o dịch chuyển tần số, không phải hoạt ộng theo thời trễ như máy o sâu.
4.3. So sánh hai phương thức phát sóng CW và sóng xung :
• Hệ thống xung có thể hoạt ộng theo phương thức truy theo áy biển (tương ối với
ất) cho ến ộ sâu 300 mét ( phụ thuộc vào tần số' sóng mang sử dụng) và phương
thức truy theo tầng nước ở ộ sâu bất kỳ, trong khi hệ thống CW chỉ hoạt ộng ở
giới hạn ộ sâu dưới 60 mét. Tuy nhiên hệ thống CW lại có một ưu iểm nổi trội là
có thể hoạt ộng ở ộ sâu rất cạn, trong khi hệ thống xung bị giới hạn bởi tần số lặp
xung không thể hoạt ộng ược với ộ sâu cạn.
• Hệ thống xung có thể dùng chung bộ tạo dao ộng cho phát và thu, trong khi hệ
thống CW yêu cầu bộ tạo dao ộng thu và phát riêng. Hệ thống CW bị hạn chế do
nhiễu sinh ra bởi bọt khí từ chân vịt khi tàu chạy lùi. Độ chính xác o tốc ộ của hệ
thống xung trội hơn hệ thống CW và cố ịnh cho tất cả các ộ sâu hoạt ộng khác
nhau. Còn ộ chính xác của hệ thống CW thì rất tốt ở nước cạn nhưng giảm xuống
nhanh khi tăng ộ sâu hoạt ộng. CHƯƠNG 5 17 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
CÁC QUY ĐỊNH LIÊN QUAN ĐẾN MÁY ĐO TỐC ĐỘ
5.1 Việc trang bị thiết bị o tốc ộ trên biển phải tuân thủ các yêu cầu sau:
• Tất cả các tàu có tổng dung tích từ 300 GT trở lên, các tàu khách không kể kích
thước phải trang bị một thiết bị o tốc ộ hoặc phương tiện khác ể chỉ bảo tốc ộ của tàu so với nước.
• Tất cả các tàu có tổng dung tích từ 500 GT trở lên, ngoài việc thỏa mãn các yêu
cầu trên phải trang bị thiết bị kiểm soát tốc ộ tàu tự ộng hoặc một phương tiện
khác ể phục vụ cho công tác ồ giải các mục tiêu khác nhằm ánh giá nguy cơ ầm va
• Tất cả các tàu có tổng dung tích từ 3000 GT ến 10000 GT, ngoài việc thỏa mãn
các yêu cầu phải trang bị thiết bị kiểm soát tốc ộ tàu tự ộng hoặc một phương tiện
khác như trên phải trang bị thiết bị thử 2 ế phục vụ cho công tác ồ giải các mục
tiêu khác nhằm ánh giá nguy cơ âm và Thiết bị thứ 2 này phải có chức năng ộc lập
với thiết bị thử nhất.
• Tất cả các tàu có tổng dung tích từ 10000 GT trở lên, ngoài việc thỏa mãn các yêu
cầu phải trang bị thiết bị kiểm soát tốc ộ tàu tự ộng hoặc một phương tiện khác ể
phục vụ cho công tác ồ giải các mục tiêu khác nhằm ánh giá nguy cơ
ảm và phải trang bị một hệ thống kiểm soát tốc ộ tàu hoặc phương tiện khác ể
kiểm soát tự ộng và giữ tốc ộ tàu. Hệ thống này có thể tích hợp các chức năng
kiểm soát vị trí và hướng của tàu
• Tất cả các tàu có tổng dung tích từ 50000 GT trở lên, ngoài việc thỏa mặn các yêu
cầu về trang bị hệ thống o tốc ộ như ối với tàu có tổng dung tích trên 10000 GT
phải trang bị thiết bị o tốc ộ tàu hoặc phương tiện khác ể chỉ báo tốc ộ so với áy
biển theo hướng ọc và ngang tàu.
5.2 Kết cấu và lắp ặt của thiết bị:
• Hệ thống phải ược thiết kế sao cho không có phần nào của thiết bị phải gắn vào
vỏ tàu và cũng không xảy ra hư hỏng ở bất kỳ phần nào của thiết bị o việc thấm
nước qua vỏ tàu gây lên.
• Nếu bất kỳ phần nào của hệ thống ược thiết kế ỗ nhô ra và thụt vào bên trong vỏ
tàu, thiết kế phải ảm bảo rằng nó có thỏ nhỏ ra khi hoạt ộng bình thường và thu
vào khi tăng tốc ến tốc ộ lớn nhất của tàu. Các vị trí nhớ ra và thự vào này phải
ược chỉ báo rõ ràng trên ở vị trí hiển thị.
• Đối với tốc ộ kế sử dụng hệ thống ịnh vị vệ tinh, việc bố trí anten máy thu phải
ảm bảo giữ khoảng cách thích hợp với các thiết bị máy móc iện hàng hải 18 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
khác có thể gây ảnh hưởng khả năng làm việc của máy thu cũng như của các thiết bị ó.
5.3 Khả năng làm việc trong các iều kiện môi trường khác nhau:
• Thiết bị o tốc ộ phải có khả năng hoạt ộng thông thường với các iều kiện và chuyển
ộng, rung lắc và nhiệt ộ có thể gặp phải trên tàu.
• Thiết bị phải ược thử nghiệm trong iều kiện thông thường và trong iều kiện tối a
như theo yêu của bảng sau: Được bảo vệ
Không ược bảo vệ Nửa nổi nữa chìm Nhiệt ộ khô +55° C +55° C (bảo quản +70°C) Nhiệt ộ ẩm
+55° C và ộ ẩm 93% cho 1 chu kỳ Thử rung
Quét 2Hz-13,2Hz với biên ộ ±1mm; 13,2Hz-100Hz với gia
tốc 7m/giây² và 2 giờ cho mỗi cộng hưởng hoặc 2 giờ với
tần số 30Hz cho cả 3 hướng trục. Mưa và phun nước Thử với vồi phun 12,5mm 100L/phút ở khoảng các 3m Nhúng nước 600kPa (6mb) trong vong 12 giờ.
• Sau mỗi lần thử ở iều kiện tối a thiết bị phải ược ặt ra ngoài môi trường có iều kiện
bình thường trong khoảng thời gian tối thiểu 3 giờ hay cho ến khi hơi nước tan hết
tùy thuộc thời gian nào lớn hơn. Sau ó mới tiến hành thử nghiệm tiếp theo. Việc
loại bỏ hơi nước có thể ược hỗ trợ bằng cách tác thiết bị hay thôi không khi có iều
kiện nhiệt nhiệt ộ bình thường vào thiết bị.
• Đối với các tốc ộ kế sử dụng vệ tinh, việc thử những nước không ược áp dụng.
Đối với các tác ã kế khác, việc thử mưa và phun nước không áp dụng.
• Chi tiết và thứ ộ bền và khả năng các iều kiện môi trường khác nhau của thiết bị
o tốc ộ ược mùi trong phuy lực 1 của tiêu chuẩn này. 5.4 Nguồn cấp
• Thiết bị o tốc ộ phải ược cấp nguồn hoạt ộng từ 2 nguồn ộc lập với nhau.
• Phải có thiết bị bảo vệ ể bảo vệ thiết bị khỏi các ảnh hưởng của quá mức về dòng
và iện áp hay sự ảo cực bất thường hay trong thời gian ngắn.
• Phải có khả năng chuyển ổi nhanh chống giữa 2 nguồn cấp cho thiết bị nhưng
không cần có 2 nguồn cấp cho các thiết bị bảo vệ i kèm. 19 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
5.5 Nhãn mắc và nhận dạng
Mỗi bộ phận chính của thiết bị a tốc ộ phải ược dàn mác bên sao cho có thể dễ dàng
nhìn thấy trong các trường hợp lắp ặt bình thường với ầy ủ các thông tin như sau: • Tên nhà sản xuất.
• Loại, mẫu mã sản phẩm.
• Số seri của sản phẩm CHƯƠNG 6
KHAI THÁC SỬ DỤNG THIẾT BỊ ĐO TỐC ĐỘ
• Việc lắp ặt thiết bị phải tuân thủ các hướng dẫn của nhà sản xuất.
• Đối với việc lắp ặt các thiết bị ngoài vỏ tàu như các cảm biến, ống áp lực
hay bộ tạo dao ộng thu phát trước tiên cần kiểm tra van nối với vỏ tàu hoạt
ộng bình thường và các thiết bị ó có thể ược tháo ra khỏi vị trí ó trong iều kiện cần thiết.
• Chỉ những người có ầy ủ khả năng chuyên môn mới ược vận hành, bảo
dưỡng thiết bị xác ịnh tốc ộ tàu.
• Không sử dụng thiết bị o tốc ộ ngoài các chức năng của nó. Việc sử dụng
không hợp lý thiết bị có thể làm hỏng thiết bị o tốc ộ.
• Cần kiểm tra toàn bị thiết bị, ảm bảo thiết bị trong tình trạng bình thường trước khi khởi ộng.
• Tắt nguồn của thiết bị khi cảm thấy có những bất thường ối với thiết bị.
Khi nghe thấy những âm thanh lạ hay thiết bị quá nóng khi làm việc cần
ngắt nguồn chính cho thiết bị và thông báo cho người có trách nhiệm biết.
Không ặt các vật thể khác lên trên hay bên cạnh thiết bị trong quá trình làm việc.
• Đối với các thiết bị nhận tín hiệu từ các cơ cấu ặt dưới nước ể o tốc ộ, không
cấp nguồn cho thiết bị khi các cơ cấu này không nằm trong nước. Phải ảm
bảo rằng ộ sâu dự trữ dưới áy tàu ủ ể thiết bị có thể hoạt ộng an toàn. Trong
các trường hợp không an toàn, các cơ cấu nhô ra khỏi vỏ tàu của thiết bị
phải ược ưa vào bên trong một cách an toàn. 20 lOMoAR cPSD| 15962736 MÁY ĐO TỐC ĐỘ
• Không tự ý tháo hoặc lắp thêm vào thiết bị các cơ cấu không phải của nhà
sản xuất hoặc không ược khuyến cáo lắp ặt, lắp ặt không úng quy
trình. Những việc làm này có thể gây cháy thiết bị, giật iện hoặc làm bị
thương người lắp ặt hay người sử dụng.
• Giữ thiết bị tránh khỏi sự xâm nhập của nước hay các hóa chất khác. Nếu ể
việc này xảy ra thiết bị rất có thể bị hỏng hoặc gây mát iện.
• Đối với các tốc ộ có kết cấu nhô ra khỏi vỏ tàu, các bộ phận này cần ược
bảo dưỡng thường xuyên.
CÂU HỎI THẢO LUẬN
Câu 1: Trình bày các yếu tố ảnh hưởng ến sự chính xác của tốc ộ kế Doppler?
Câu 2: Khi thiết bị o tốc ộ cung cấp các thông tin, dữ liệu về tốc ộ i ược ến các thiết bị
khác như RADAR,AIS và các thiết bị liên quan khác thì dữ liệu kết nối này cần phải lưu ý iều gì?
Tài liệu tham khảo : 1. Sổ tay Hàng hải.
2. Tiêu chuẩn Quốc Gia TCVN 9533 : 2013 Thiết bị o tốc ộ và o sâu trên tàu biển. 3. www.hanghaikythuat.tk 21
Tài liệu liên quan:
-

BÀI GIẢNG HÀNG HOÁ VẬN TẢI 3TC-24.1 - NĂM 2021
39 20 -

Học phí Đại học Giao thông vận tải năm học 2024 - 2025
186 93 -
Bài Tập Lớn | Trường Đại Học Giao Thông Vân Tải
1.1 K 540 -

Chương 3 Hàng thông dụng- Quản lý hàng hải | Trường Đại học Giao thông Vận Tải
539 270 -

Chương 5. Dầu và sản phẩm dầu - Quản lý hàng hải | Trường Đại học Giao thông Vận Tải
809 405