TIỂU LUẬN :ĐỀ TÀI MÔ HÌNH HÓA VÀ MÔ PHỎNG ĐỘNG CƠ ĐIỆN KHÔNG ĐỒNG BỘ TRÊN HỆ TỌA ĐỘ αβ DƯỚI DẠNG HÀM TRUYỀN ĐẠT môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
Nhóm 2: Mô hình hóa và mô phỏng động cơ điện không đồng bộ trên hệ tọa độ αb với các biến trạng thái là các dòng điện stator và rotor dưới dạng hàm truyền đạt
TIỂU LUẬN :ĐỀ TÀI MÔ HÌNH HÓA VÀ MÔ PHỎNG ĐỘNG CƠ ĐIỆN KHÔNG ĐỒNG BỘ TRÊN HỆ TỌA ĐỘ αβ DƯỚI DẠNG HÀM TRUYỀN ĐẠT môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
Tài liệu gồm 12 trang , giúp bạn tham khảo, ôn tập và đạt kết quả cao
Môn: Truyền động điện (TDD) 47 tài liệu
Trường: Trường Đại học Bách khoa, Đại học Đà Nẵng 1.7 K tài liệu
Tác giả:



Preview text:
ĐẠI HỌC ĐÀ NẴNG
TRƯỜNG ĐẠI HỌC BÁCH KHOA KHOA ĐIỆN
BÁO CÁO TIỂU LUẬN
ĐỀ TÀI: MÔ HÌNH HÓA VÀ MÔ PHỎNG ĐỘNG CƠ
ĐIỆN KHÔNG ĐỒNG BỘ TRÊN HỆ TỌA ĐỘ αβ
DƯỚI DẠNG HÀM TRUYỀN ĐẠT Nhóm 2
Giáo viên hướng dẫn : TS. Nguyễn Khánh Quang Sinh viên thực hiên : Nguyễn Duy Đức : Nguyễn Văn Gia Luật
: Trần Phước Thịnh Phong : Nguyễn Thành Thi : Phạm Minh Tuấn Lớp HP : 21.32A
Đà Nẵng, ngày 03 tháng 04 năm 2025
Nhóm 2: Mô hình hóa và mô phỏng động cơ điện không đồng bộ trên hệ tọa độ αb với các
biến trạng thái là các dòng điện stator và rotor dưới dạng hàm truyền đạt
1. Thông số động cơ không đồng bộ (IM).
Thông số động cơ không đồng bộ Power rated Pn = 7500 (kW) Torque rated Tm = 45 Line-to-line voltage Ud = 400 (Vrms) Frequency f = 50 (Hz) Stator resistance Rs = 0.435 (Ohms) Stator leakage inductance Lls = 2.0e-3 (H) Rotor resistance Rr = 0.816 (Ohms) Rotor leakage inductance Llr = 2.0e-3 (H) Mutual Inductance Lm = 69.31e-3 (H) Stator self inductance Ls = Lm + Lls (H) Rotor self inductance Lr = Lm + Llr (H) Number of pole pairs p = 2
2. Các ký hiệu được sử dụng. i ,i , i sa sb
sc: Dòng điện ba pha dây quấn stator u , u ,u sa sb
sc: Điện áp ba pha dây quấn stator ψ ,ψ , ψ sa sb
sc: Từ thông ba pha dây quấn stator i , i , i ra rb
rc: Dòng điện ba pha dây quấn rotor u ,u , u ra rb
rc : Điện áp ba pha dây quấn rotor ψ ,ψ ,ψ ra rb
rc: Từ thông ba pha dây quấn rotor i ,i
ds qs: Dòng điện dây quấn stator trong hệ tọa độ dq i ,i
dr qr : Dòng điện dây quấn rotor hệ tọa độ dq ω , ω e
r: Tốc dộ quay đồng bộ và tốc độ quay rotor θ ,θ ,θ f r
s: Góc tốc độ đồng bộ, góc rotor, góc trượt R , R s
r: Điện trở dây quấn stator, rotor 1
3. Sơ đồ thay thế của động cơ không đồng bộ.
- Phương trình cân bằng phía stator: dψ (t )
u (t )=R i sa sa s sa (t )+ dt (1)
u (t )=R i dψ (t ) sb ( t )+ sb s sb dt (2) d ψ (t )
u (t )=R i sc sc s sc (t )+ dt (3)
- Phương trình cân bằng phía rotor: d ψ (t ) u ( t )=R ra ra r i (t )+ ra dt ( 4) dψ (t )
u ( t )=R i rb rb r rb (t )+ dt (5)
u (t )=R i dψ (t ) rc (t )+ rc r rc dt (6)
- Phương trình biểu diễn mối quan hệ tốc độ::
ω =ω +ω s sl r (7 ) ω = p Ω r r (8)
4. Mô hình toán học trên hệ tọa độ αβ .
- Phương trình mô tả động cơ dưới dạng vector: dψs us=R is+ s s s s dt (9) dψr ur=R ir+ r =0 r r r dt (10)
+ us, is ,ψ s: vector điện áp, dòng điện và từ thông stator trên hệ tọa độ cố định (stator s s s coordinate αβ ) 2
+ ur , ir , ψr: Vector điện áp, dòng điện và từ thông rotor trên hệ tọa độ rotor (rotor coordinate r r r DQ)
+ Các kí tự phía trên s , r để chỉ các vector biểu diễn trên hệ tọa độ αβ và DQ.
- Phương trình mô tả quan hệ giữa từ thông và dòng điện:
ψs=L i s+ L is s s s m r (11)
ψr=L ir+ L ir r m s r r (12)
- Điện cảm stator Ls, rotor Lr: L =L + L s m sσ (13 ) L =L + L r m rσ (14 ) + L , L , L sσ rσ
m: Điện cảm tản stator, rotor và điện cảm từ hóa
- Sử dụng phép biến đổi Park, phương trình từ thông viết lại:
ψs=L i s+ L is=L i s+ L ir e jθr s s s m r s s m r (15)
ψr=L ir+ L ir=L ir+ L is e−j θr r m s r r r r m s (16 )
+ θr : Góc lệch pha giữa trục tọa độ αβ và DQ
- Nhân phương trình (10) và (16) với e jθr ta được phương trình (18) và (20), mô hình động
cơ trên hệ tọa độ αβ là: dψs us=R is+ s s s s dt (17) dψs us=R is+ r − j ω ψs r r r dt r r (18)
ψs=L i s+ L is s s s m r (19)
ψs=L i s+ L is r r r m s (20) Với: + us=ur e j θr r r 3 + is=ir e jθr r r dψr d ψs + r . e j θr = r − jω ψs dt dt r r
+ ψs =ψr e j θr r r
- Dựa vào phương trình (17) và (18), các thành phần của điện áp stator và rotor là: dψ u =R i αs + αs s αs dt (21 ) dψ u =R i βs + βs s βs dt u =R i d ψαr + + ω ψ αr s αr dt r βr u =R i dψβr + − ω ψ βr s βr dt r αr
- Dựa vào phương trình (19) và (20), phương trình từ thông stator và rotor:
ψ =L i + L i αs s αs m αr (22)
ψ =L i + L i βs s βs m βr
ψ =L i + L i αr r αr m αs
ψ =L i + L i βr r βr m βs
- Dựa vào phương trình (21) và (22), ta có mô hình động cơ không đồng bộ với các biến
trạng thái là dòng điện: d i −R ω L2 R L ω L 1 L αs =
s i + r m i + r m i + r m i + u − m u αs βs αr βr αs dt σ L σ L L σ L L σ L σ L σ L L αr s s r s r s s s r d i −ω L2 R ω L R L 1 L βs =
r m i − s i − r m i + r m i + u − m u αs βs αr βs dt σ L L σ L σ L σ L L βr σ L σ L L βr s r s s s r s s r d i R L ω L R ω L αr s m r m r r m 1 = i − i − i − i − u + u
dt σ L L αs σ L βs σ L αr σ βr σ L L αs σ L αr s r r r s r r (23) d i ω L R L ω R L βr r m s m r r m 1 = i + i + i − i − u + u dt σ L αs σ L L βs r r σ αr σ L βr r σ L L βs σ L βr s s r r L2 + Với σ =1−
m : Hệ số tản (Hệ số tiêu tán tổng) L L s r
- Phương trình cân bằng moment của động cơ: 4 3
T = p L ℑ{i¿ i } em 2 m r s d Ωr T −T em
load −BΩ =J , ω = p Ω r dt r r (24) Với
+ J , Tload : Moment quán tính và momen tải.
+ p: Số cặp cực từ.
+ Ωr : Tốc độ cơ của động cơ (rad/s).
+ B: Hệ số tổn thất ma sát.
5. Mô hình toán học động cơ không đồng bộ rotor lồng sóc trên hệ tọa độ αβ.
- Từ các phương trình (19) và (20), ta có: 1 is= (ψs− L is) r L r m s r (25 ) L
ψs=L i s+ m (ψs−L is) s s s L r m s r
- Thay phương trình (10) vào phương trình (17) và (18): d is L dψs
us=R is+σ L s + m r s s s s dt L dt r (26 ) −L 1 d ψs 0= T m s is+ T r r dt
( − j ω )ψs+ r r r L
+ Với T = r : hằng số thời gian rotor r Rr
- Phương trình (26) có thể biểu diễn với các biến trạng thái với dòng điện stator và từ thông
rotor trên hệ tọa độ αβ : d iαs 1 1−σ
1−σ ' 1−σ ' 1 =−( + ψ + ω ψ + u dt
σ T s σ T r )i + αr r βr αs αs σ σ L σ T r s (27 ) d i 1−σ βs 1 1−σ ' 1−σ ' 1 =−( + ω ψ + ψ + u dt
σ T s σ T r )i − r αr βr βs βs σ σ T r σ L s (28) 5 dψ'
αr = 1 i − 1 ψ' −ω ψ' dt T αs T αr r βr r r (29) dψ' 1
βr = 1 i + ω ψ' − ψ' dt T βs r αr T βr r r (30) Với: ψ ψ + ψ' = αr αr , ψ' = βr L βr m Lm L
+ T = s : Hằng số thời gian stator s R s 3 3
T = p L ℑ{ψ¿ i }= L2
p m (ψ' i −ψ' i ) em 2 m r s 2 L αr βs βs αs r (31) - Đặt: 1 = 1 + 1−σ T σ T σ T σ s r
- Biến đổi Laplace phương trình (27): d iαs −1 1−σ ' 1−σ ' 1 = i + ψ + ω ψ + u dt T αs σ T αr σ r βr σ L αs σ r s −1 1−σ 1−σ 1 ¿> s I (s )= I ( s )+ Ψ' ( s )+ ω Ψ' ( s)+ U αs T αs σ T αr σ r βr σ L αs σ r s 1−σ 1−σ 1 Ψ' (s )+ ω Ψ' ( s )+ U σ T αr σ r βr σ L αs ¿> I (s )= r s αs s+ 1 T σ (32 )
- Biến đổi laplace phương trình (28): d i βs −1 1−σ ' 1−σ ' 1 = i − ω ψ + ψ + u dt T βs r αr βr βs σ σ σ T r σ Ls −1 1−σ 1−σ 1 ¿> s I (s )= I (s )− ω Ψ ' (s )+ Ψ ' (s )+ U βs T βs σ r αr σ T βr σ L βs σ r s −1−σ 1−σ 1 ω Ψ ' (s )+ Ψ ' (s )+ U σ r αr σ T βr σ L βs ¿> I (s )= r s βs s+ 1 T σ (33) 6
- Biến đổi laplace phương trình (29): dψ' 1
αr = 1 − ψ' −ω ψ' i αs dt T T αr r βr r r 1 1
¿> s Ψ' (s )= I ( s)−
Ψ' (s )−ω Ψ' ( s) αr T αs T αr r βr r r
1 I (s )−ω Ψ' (s ) r βr T αs
I (s )−T ω Ψ' (s )
¿>Ψ ' (s )= r = αs r r βr αr s+ 1 s T r+1 T r (34 )
- Biến đổi laplace phương trình (30): dψ'
βr = 1 i + ω ψ' − 1 ψ' dt T βs r αr T βr r r 1 1
¿> s Ψ' (s )=
I ( s )+ ω Ψ' ( s )− Ψ' ( s) βr T βs r αr T βr r r
1 I ( s)+ ω Ψ' ( s) r αr T βs
I ( s )+T ω Ψ' (s )
¿>Ψ ' (s )= r = βs r r αr βr s+ 1 s T r+1 T r (35 )
- Biến đổi laplace phương trình (31):
T = 3 p L ℑ{ψ¿ i }= 3 L2
p m (ψ' i −ψ' i ) em 2 m r s 2 L αr βs βs αs r 3 L2
¿>T ( s)= p m [Ψ ' (s ) I (s )−Ψ' (s ) I (s ) ] em 2 L αr βs βr αs r (36)
- Biến đổi laplace phương trình (24): d Ω T −T r em
load −BΩ =J , ω = p Ω r dt r r
¿>T ( s)−T
=BΩ ( s )+ sJ Ω (s ); em load r r
T ( s )−T
¿> Ω (s )= em load r B+ sJ 7 p ¿> ω ( s)=
( T ( s )−T ) r B+ sJ em load (37)
=> Từ các phương trình (32), (33), (34), (35), (36), (37) và (38) ta có thể mô hình hóa động
cơ không đồng bộ ba pha dưới dạng hàm truyền đạt với biến trạng thái là các dòng điện stator và rotor.
6. Mô hình hóa động cơ điện không đồng bộ trên hệ tọa độ αβ với các biến trạng
thái là các dòng điện stator và rotor dưới dạng hàm truyền đạt. 1−σ 1 −1−σ 1−σ 1
Ψ' (s )+ 1−σ ω Ψ' ( s )+ U ω Ψ' ( s )+ Ψ' (s )+ U σ T αr σ r βr σ L αs σ r αr σ T βr σ L βs I (s )= r s I (s )= r s αs βs s + 1 s+ 1 T T σ σ ¿ ¿ ¿ ¿ 1
I (s )−ω Ψ' ( s) r βr T αs
I ( s)−T ω Ψ' ( s)
Ψ' ( s )= r = αs r r βr αr s+ 1 s T r+1 T r ¿ ¿ 1 I r αr
T βs (s )+ω Ψ ' (s ) I ( s)+T ω Ψ' (s )
Ψ' (s )= r = βs r r αr βr s+ 1 s T r+1 T r ¿ ¿ 3 L2
T (s )= p m [Ψ ' ( s) I ( s )−Ψ' ( s ) I ( s )] em 2 L αr βs βr αs r ¿ ¿ 8
7. Kết quả mô phỏng.
a. Điện áp và dòng điện stator trên hệ tọa độ abc. 9
b. Dòng điện stator trên hệ tọa độ αβ .
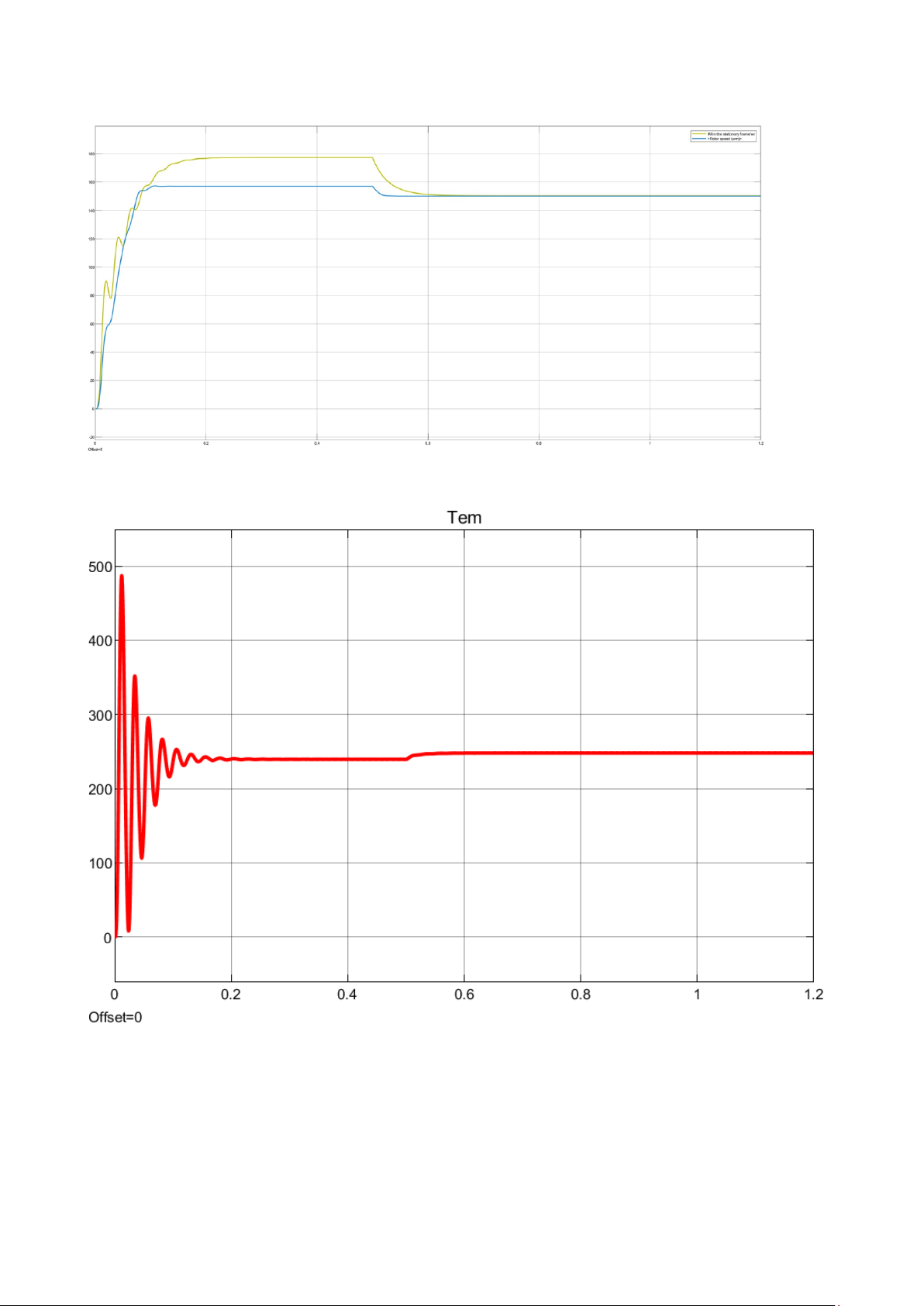
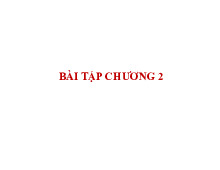
c. Từ thông rotor trên hệ tọa độ αβ . 10 d. Tốc độ động cơ. e. Moment động cơ. 11
Tài liệu liên quan:
-
Bài tập Chương 2 môn Truyền động điện | Trường Đại học Bách khoa, Đại học Đà Nẵng
30 15 -
BÁO CÁO CUỐI KỲ HỌC PHẦN: ĐIỀU KHIỂN TRUYỀN ĐỘNG ĐIỆN TRONG CÔNG NGHIỆP - môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
69 35 -

Đề thi môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
62 31 -

Tổng hợp câu hỏi ôn tập phần điện trong nhà máy điện- môn truyền động điện –Trường Đại học bách khoa – đại học Đà Nẵng
63 32 -

ĐỒ ÁN: TRUYỀN ĐỘNG ĐIỆN TÊN ĐỀ TÀI : Thiết kế hệ thống điều khiển truyền động điện dùng để điều khiển động cơ một chiều kích từ độc lập vận chuyển gạo có khối lượng 10kg di chuyển với tốc độ chính xác–Trường Đại học bách khoa – đại học Đà Nẵng
63 32