Xuất hiện trong các bộ truyền không được bôi trơn hay bôi trơn không đầy đủ | Giáo Trình môn Cơ khí ứng dụng | Đại học Bách khoa hà nội
Xuất hiện trong các bộ truyền không được bôi trơn hay bôi trơn không đầy đủ. Tài liệu trắc nghiệm môn Cơ khí ứng dụng học giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Cơ khí ứng dụng 20 tài liệu
Trường: Đại học Bách Khoa Hà Nội 5.8 K tài liệu
Tác giả:





Preview text:
CƠ KHÍ ỨNG DỤNG
Mã học phần: CH3456
Khối lượng 3(3-1-0-6)
TRƯỜNG ĐẠI HỌC BÁCH KHOA HÀ NỘI
Bộ môn Máy và Thiết bị Công nghiệ p Hóa chất
5.3.1 Các khái niệm về truyền động 1) Các khái niệm
- Truyền cơ năng từ động cơ đến các bộ phận máy.
- Biến đổi vận tốc, l ực, mô men hoặc dạng hay quy luật chuyển động.
5.3.1 Các khái niệm về truyền động
2) Lý do sử dụng truyền động cơ khí
- Tốc độ các bộ phận công tác có nhiều giá trị khác nhau
dùng động cơ tốc độ chuẩn và hệ truyền động cơ
khí sẽ thuận tiện và chi phí đầu tư thấp. - Dùng h ệ truyền động c ơ khí c
ho phép từ một động cơ có
thể truyền đến nhiều bộ phận công tác khác nhau. - Dạng
chuyển động của các bộ ph ận c ông tác th ường đa
dạng (quay đều, quay không đều, quay lắc, tịnh tiến
khứ hồi, …), không có động cơ thỏa mãn (hoặc nếu có cũng rất đắt). - Dùng hệ
truyền động cơ khí an toàn cho người vận hành
hơn là nối trực tiếp động cơ với bộ phận công tác.
5.3.1 Các khái niệm về truyền động
3) Phân loại truyền động cơ khí - Truyền động nhờ
ma sát: Truyề n động đai, truyền động bánh ma sát. - Truyền
động nhờ ăn khớp: Truyền động bánh răng,
truyền động bánh vít, truyền động xích.
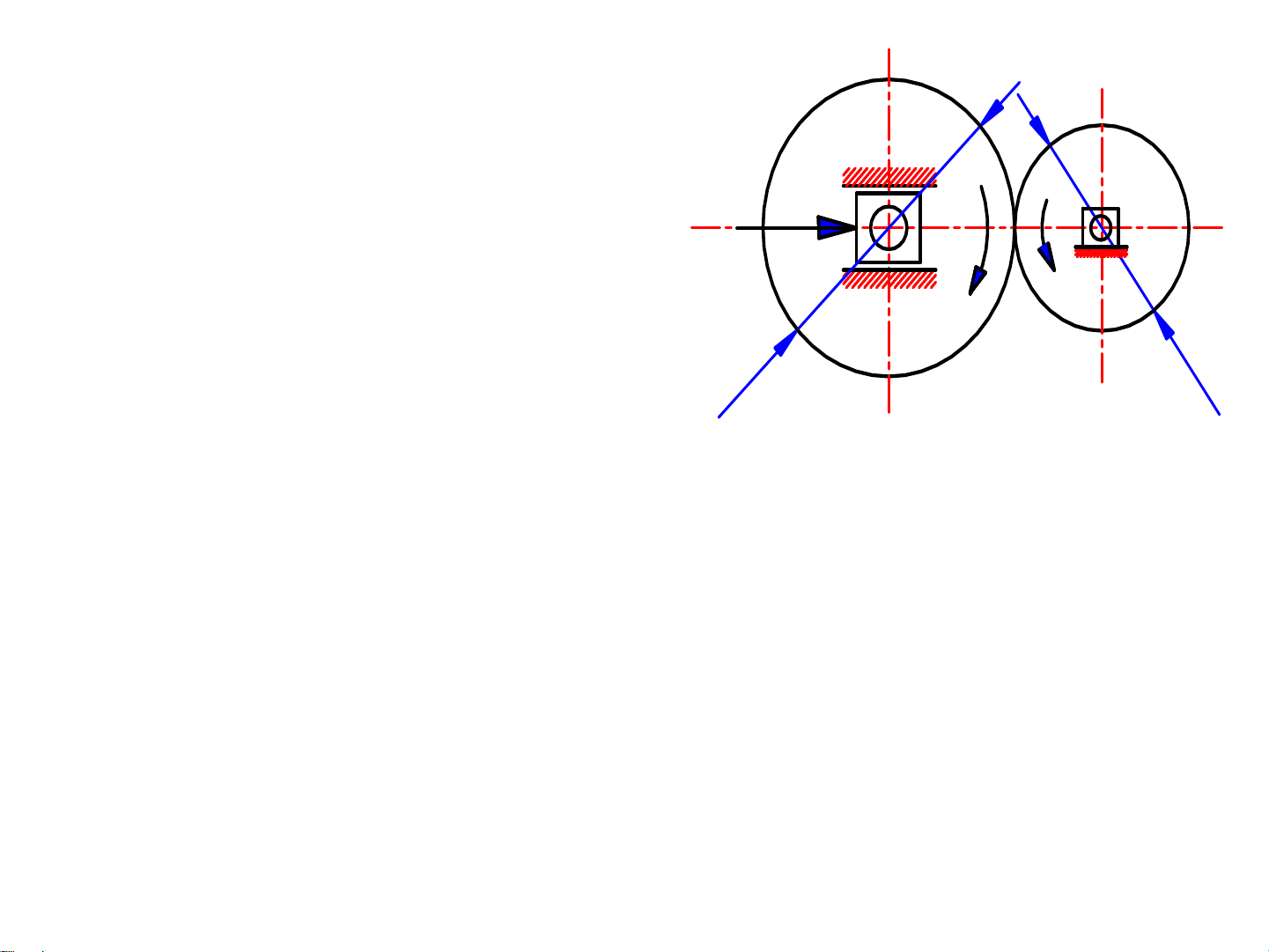
5.3.2 Truyền động bánh ma sát
5.3.2.1 Giới thiệu bộ truyền ma sát: 1.
Bộ truyền bánh ma sát thường dùng để truyền chuyển động: 1) Hai trục song song 2) Hai trục cắt nhau
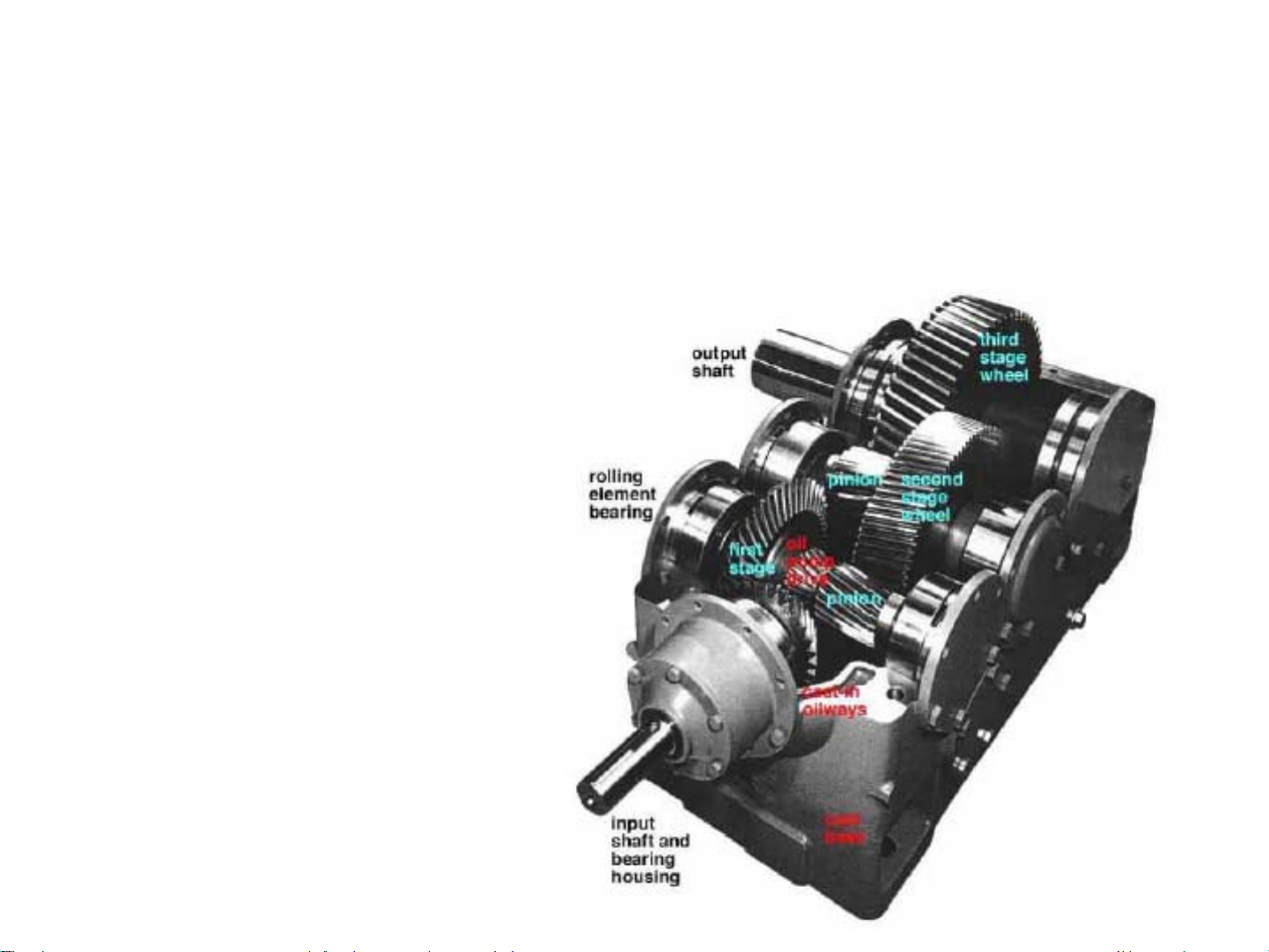
Bộ truyền có 3 bộ phận chính:
+ Bánh dẫn 1 có đường kính d1 lắp trên trục I, quay với số vòng n
, công suấ ttruyền động P , mômen trên trục T . 1 1 1
+ Bánh bị dẫn 2 có đường kính d2 lắp trên trục II, quay với số vòng n , công suấ ttruyền độ ng P , mômen trên trục T . 2 2 2
+ Bộ phận tạo lự c ép ban đầu F
0 để nén 2 bánh với nhau.
Lực F tạo ra áp lực F trên bề mặt t/x 2 bánh, tạo ra 0 n lực
ma sát; F = F .f (f: hệ số ma sát) ms n
Trong bộ biến tốc ma sát, có thể thêm bộ phận phụ: bánh ma sát p hụ hoặc dây đai phụ.
Nguyên lý làm việc: Hai bánh ma sát được nén bởi lực F trên 0,
bề mặt t/x có áp suất, có lực ma sát F
lực ma sát cản trở chuyển ms,
động trượt tương đối giữa 2 bánh. Do đó khi bánh dẫn quay sẽ kéo
bánh bị dẫn quay theo. Như vậy: Chuyển động đã được truyền từ
trục I mang bánh dẫn sang trục II mang bánh bị dẫn. Bộ truyền -
truyền chuyển động nhờ lực ma sát trên bề mặt tiếp xúc của các bánh.
Lực ma sát cần thiết trên bề mặt tiếp xúc phải thỏa mãn:
F = F .f ≥ K.F ; K: hệ số tải trọng; lấy K = 1,25 ÷ 1,5 ms n
5.3.2.2 Phân loại bộ truyền ma sát:
-- Tỷ số truyền ko điều
chỉnh được: bộ truyền bánh ma sát trụ
, bộ truyền bánh ma sát nón (hình tr ước): -- Tỷ số truyền
điều ch ỉnh được: b
ộ biế n tốc ma sát
kiểu mặt đĩa bánh côn
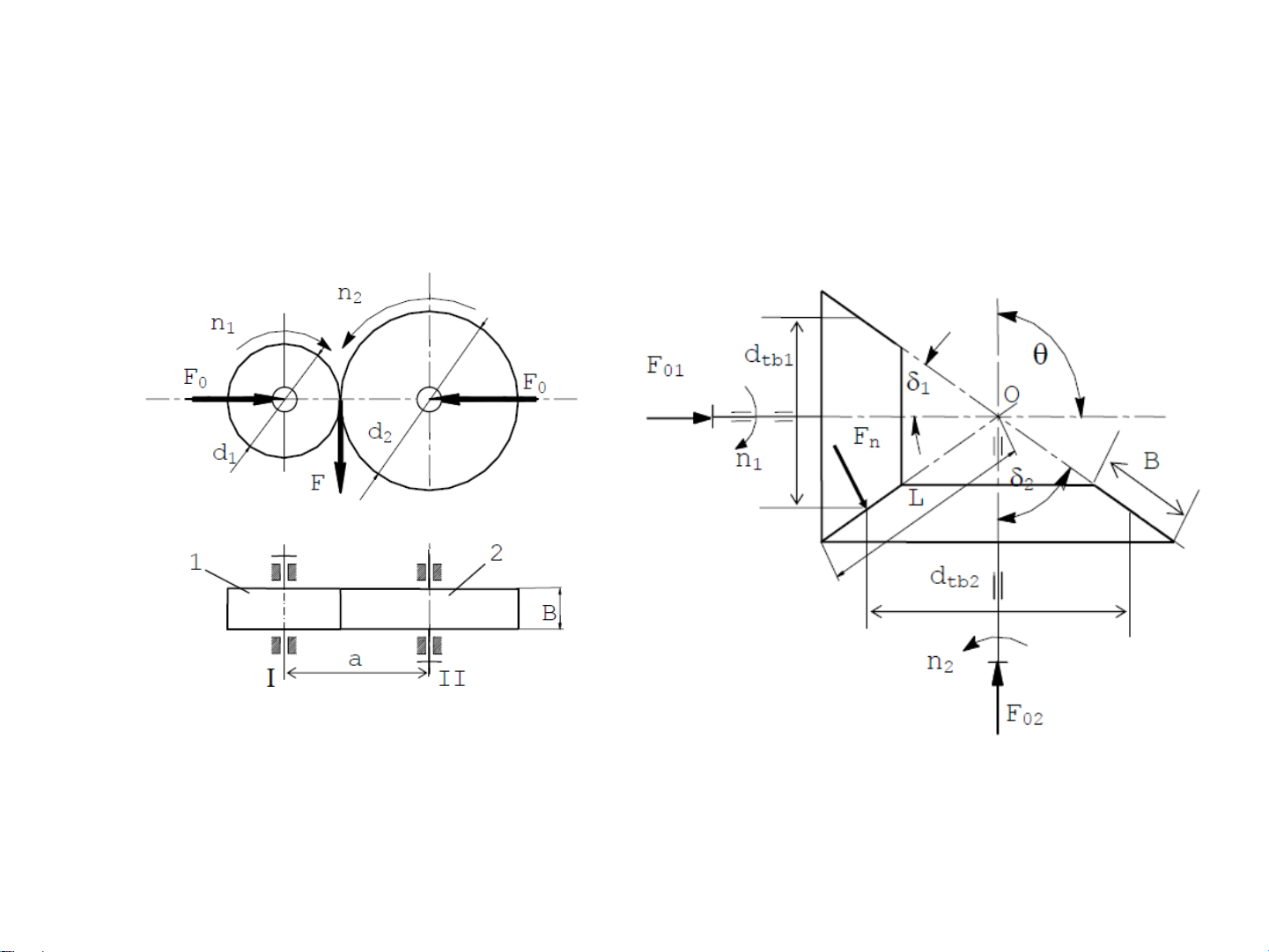
5.3.2.3 Thông số hình học chủ yếu: Đường kính tính toán d , d 1
2 : là đ/kính của vòng tròn đi qua điểm tiếp x úc c ủa mỗ i bánh ma sát. d2 = d1 . i. (1 – ξ)
Bộ truyền ma sát nón: đ/kính tính toán: d và d tb1 tb2 B ộ biế n tốc ma sát có các đườ ng kính giới hạ n: d1min và d 1max d2min và d2max Khoảng cách tr
ục a; bộ truyền ms nón thay a bằng chiều dài đường sinh L Chiều rộng bánh
ma sát B1, B2. Thông thường lấy B1 > B2 Có thể lấy B = B1 = B2 Góc nón
của bánh d ẫn δ1 và bánh bị dẫn δ2 Góc gi ữa h ai tr ục của bánh ma sát θ
5.3.2.4 Cơ học truyền động bánh ma sát:
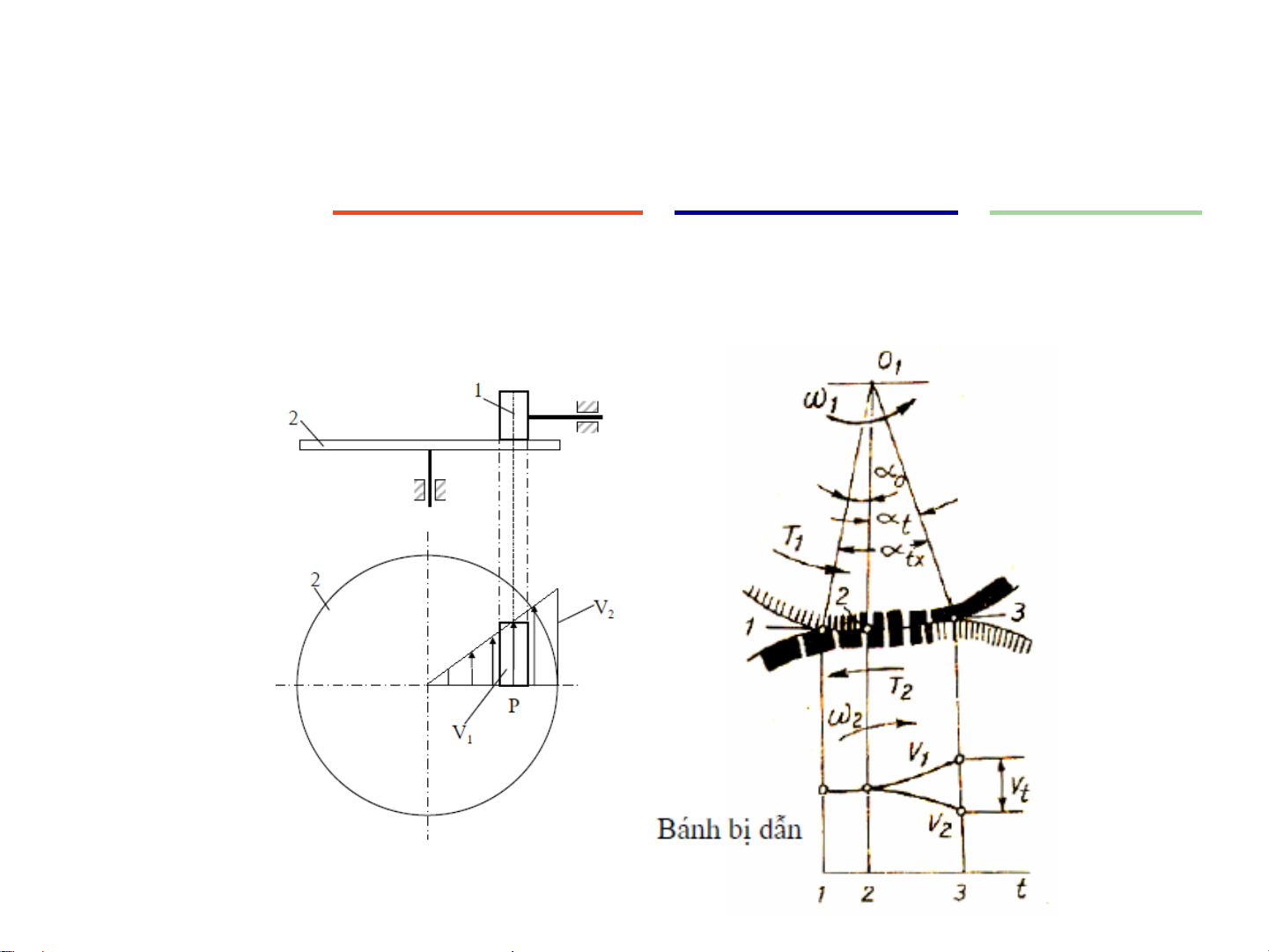
1. Sự trượt trong bộ
truyền bá nh m a sát: Có 3 d ạng: trượt hìn
h học, trượt đàn hồi, trượt trơn.
Trượt làm mất công suất, gây nóng, làm mòn các bề mặt
tiếp xúc, giảm hi
ệu suấ t, tỷ số truyền không ổn định . trượt hình học trượt đàn hồi
a.Trượt hình học: xuất hiện do có sự khác nhau về vận
tốc tại các điểm tiếp x úc giữa hai bánh. Chỉ xảy ra với m ột số kiểu bộ truyền.
b.Trượt đàn hồi: xuất hiện do biến dạng đàn hồi khác nhau của hai bánh
theo phương tiếp tuyến t ại vù ng tiếp xúc và xảy r a t rong b ất kỳ
bộ truyền nào khi làm việc. Do có tr ượt, t ốc độ
bánh b ị dẫn n hỏ hơn tố c độ bánh dẫ n, làm mất mát vận tố c. Trượt đ àn hồi k hông thể tránh đượ c
c. Trượt trơn: xảy ra do lực ma sát ko đủ lớn để mang tải.
Khi trượt trơn, bánh bị dẫn dừ ng lạ i, còn b ánh d ẫn t iếp tụ c chuyể n động, gây m
òn c ục bộ hoặ c xước bề m ặt. Trượt trơn có th
ể tránh nhờ thiết kế và v ận hành đúng.
2. Vận tốc và tỷ số truyền:
a) Truyền động bánh ma sát trụ: Vận tốc vò ng v , v củ
a bánh d ẫn và bánh bị dẫn: 1 2 .D . .D . 1 1 n n v (m / ) 2 2 v (m / ) 1 s 60 10 . 3 2 s . 60 103 v v Do có sự trượt nên v 1 2
2 < v1. Gọi ξ là hệ số trượt: v 1 Suy ra: v2 = v1(1 – ξ) Tỷ số truyền i: 1 n 2 n D i D Bỏ qua trượt: 1 2 i n D 1 ( ) 2 1 n D 2 1
b) Truyền động bánh ma sát nón:
Gọi D1 , D2 là đường kính trung bình của bánh dẫn và bánh n D D sin 1 2 2 với 2 bị dẫn. N ếu b
ỏ qua sự trượt: i n D D sin 2 1 1 1 Trong đó: , 1
2 là góc nón của bánh dẫn và bánh bị dẫn sin
Nếu xét đến sự trượt: 2 i sin 1() 1
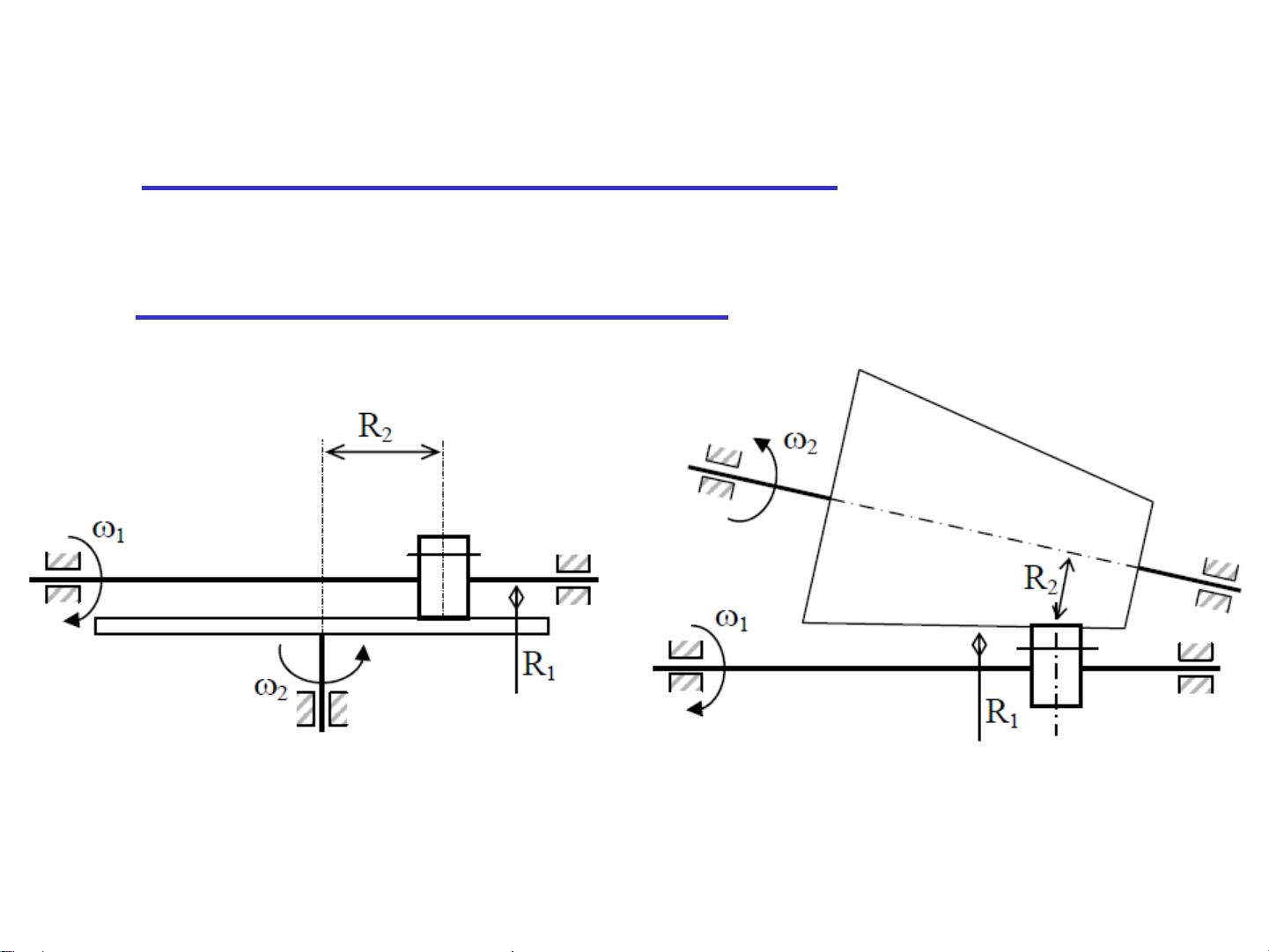
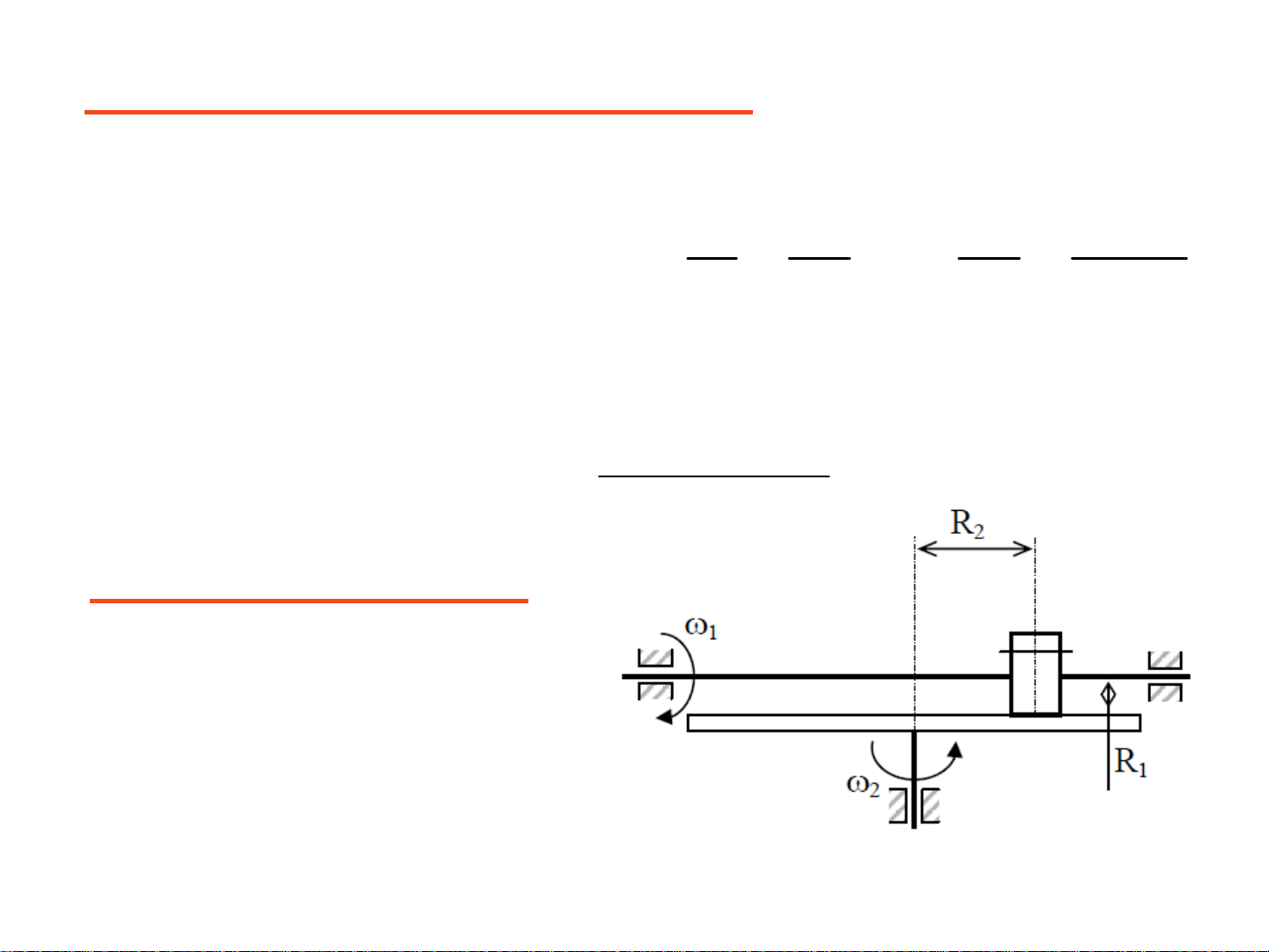
c) Bộ biến tốc ma sát:
VD: bộ biến tốc ms kiểu đĩa
Do R2 có thể thay đổi từ R2max đến R2min, nên khi n1=const
thì n có thể thay đổi từ n đến n . 2 2max 2min 1 n 2
Tương ứ ng tỷ số truyền i R cũng thay n R 1 ( ) 2 1 trong khoảng i đến i đổi min max n R 1 n 2 R min 1 2max Với: i Và: i min max n R 1 ( ) n R 1 ( ) 2max 1 2min 1 2 n max max i 2 R max Tỷ số D
(gọi là khoảng đ/chỉnh tốc độ) 2 n min min i 2 R min
Khoảng điều chỉnh tốc độ là một trong những đặc trưng của bộ biế n tốc ma sá t
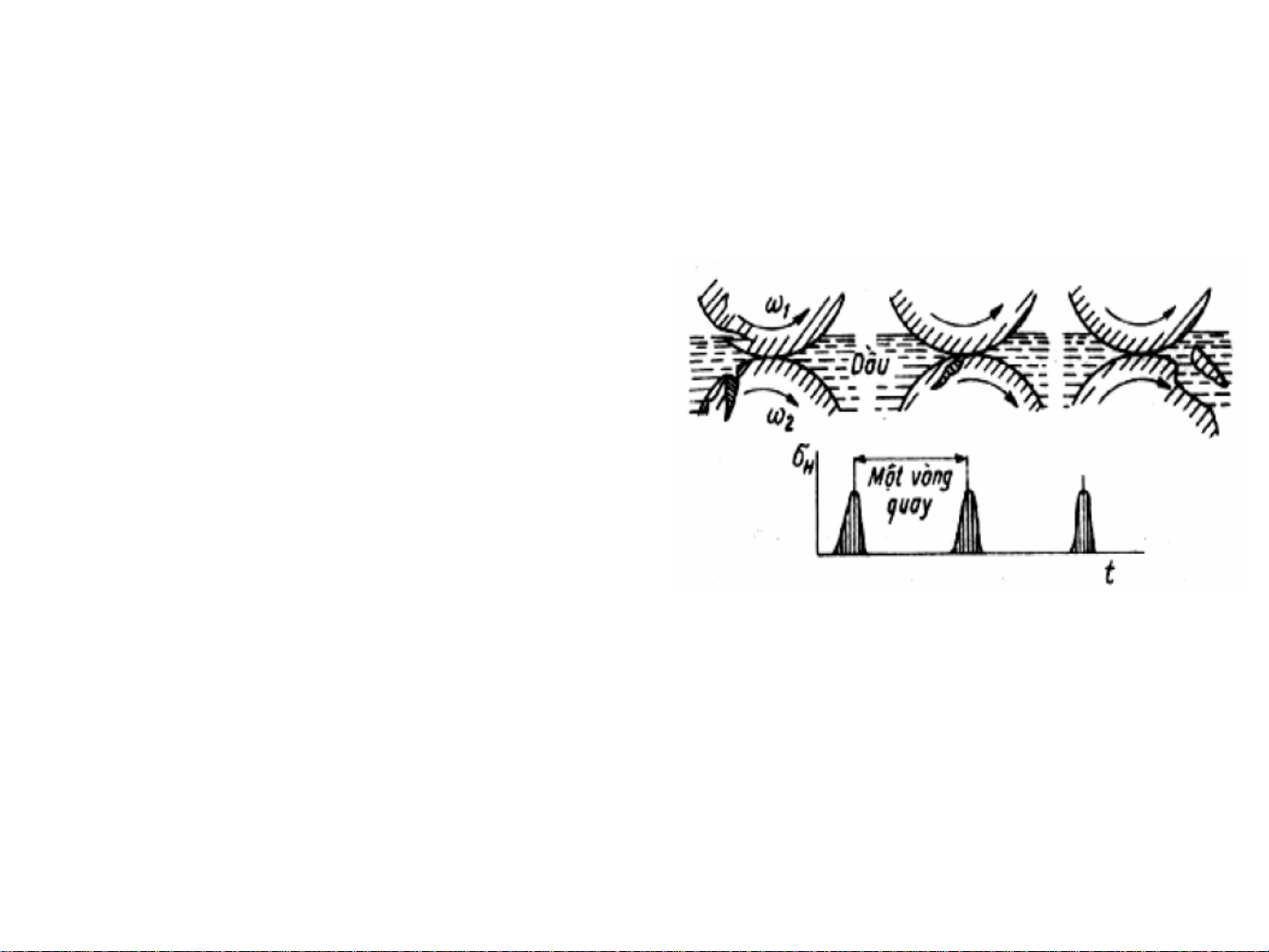
5.3.2.5 Các dạng hỏng và chỉ tiêu tính toán: 1) Tróc rỗ vì mỏi b ề mặt là m
việc: với bộ truyền được bôi
trơn đầy đủ, làm việc với áp
suất nhỏ và trung bình, sau
một thời gian làm việc trên bề
mặt xuất hiện các vết rỗ.
2) Mòn bề mặt tiếp xúc: Xuất hiện trong các bộ truyền
không được bôi trơn hay bôi trơn không đầy đủ. Mòn xảy ra
càng nhanh khi bộ truyền bị trượt trơn.
3) Dính: Khi bộ truyền làm việc với vận tốc cao, tải trọng
lớn, bôi trơn không đủ hoặc không được bôi trơn.
- Các dạng hỏng trên đều liên quan đến ưs tiếp xúc,
do đó để tránh hỏng, cần tính toán bộ truyền theo độ
bền tiếp xúc: Ϭ ≤ [Ϭ ] H H
- Với các bánh ms làm bằng vật liệu phi kim, thường
dựa vào tải trọng riêng pháp tuyến để k.nghiệm bền: q ≤ [q ] n n
5.3.2.6 Vật liệu và ứng suất cho phép:
a)Vật liệu làm bề mặt bá nh:
-Thép tôi: dùng khi b ộ truyền có k.thước nhỏ gọn, làm việc t
rong d ầu, hi ệu suấ t lớn, đòi hỏi gia công c/x và độ nhẵ n bề mặt cao. - G ang: được d
ùng trong bộ truyền để hở,có bôi trơn hoặ c chạy khô. - Têchtôlit
và phíp dùng với thép (hoặc gang): sử dụ ng trong b ộ
truyền l àm việ c khô, không cần c/s cao, k/thước lớ
n, hiệ u suất thấp nh ưng lực tác dụ ng lên
trục nhỏ hơn so với cặp bánh m/s thép hoặc gang. -Gỗ,da,vả
i,cao su,..: bọc lót b ề m ặt b ánh d ẫn, làm
việc với bánh bị dẫn b ằng thép hoặc g ang để khi bị
trượt trơn thì bánh bị dẫn ít bị mài v ẹt.
b) Ứng suất tiếp xúc cho phép: - Bánh m a sát bằng thép: 2
1,5 2,5 HB, N / mm tx hoặc 2
13 18 HRC, N / mm tx
Trị số nhỏ được lấy cho trường hợp không có dầu bôi trơ n. - Bánh ma sát bằng gang: 1,5
,N/mm2 với Ϭ là ứs bền uốn. u u tx
- Bánh ma sát bằng Têchtôlit, làm việc khô:
80 100 (N / 2 mm ) tx VÝ dô: Cho bé truyÒn b¸nh S ma s¸t h×nh trô. B¸nh dÉn n2 n1
cã ®−êng kÝnh D = 40 cm; 1 D D1 2 quay víi tèc ®é n = 120 1 v/ph;
truyÒn m« men M=180 (Nm). B¸nh bÞ dÉn cã tèc ®é n = 2
300 v/ph. TÝnh tØ sè truyÒn, lùc Ðp S, chiÒu dµi ®−êng sinh
cña c¸c b¸nh vµ ®−êng kÝnh D cña b¸nh bÞ dÉn biÕt c¸c 2
b¸nh lµm b»ng gang bäc cao su cã hÖ sè ma s¸t tr−ît
f=0,25 ; hÖ sè an toµn k = 1,25
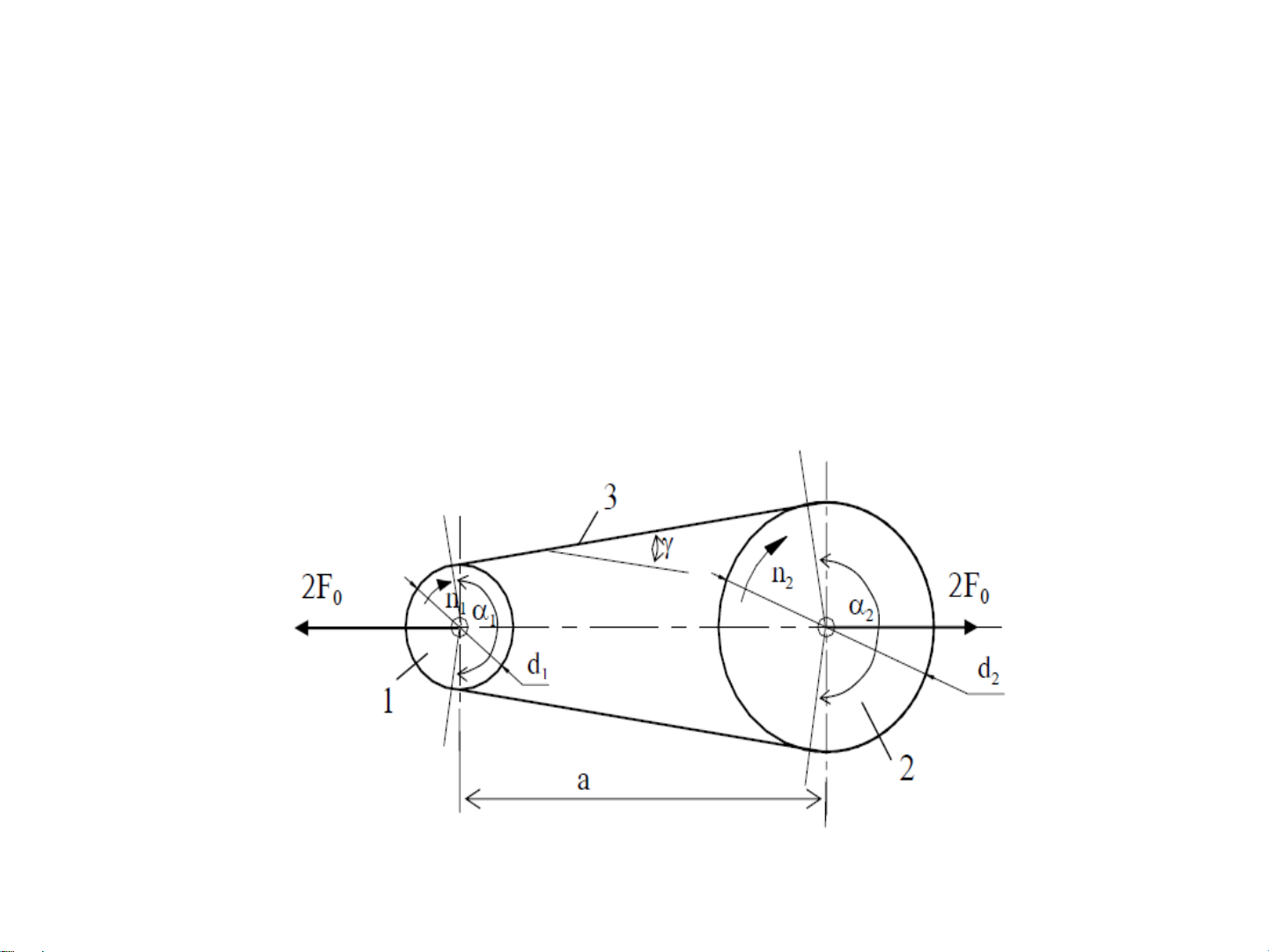
5.3.3 Truyền động đai
5.3.3.1. Giới thiệu bộ truyền đai:
Bộ truyền đai thường dùng để truyền chuyển động:
- Giữa 2 trục song song và quay cùng chiều:
Tài liệu liên quan:
-

tinh toan he dan dong co khi trinh chat
10 5 -

Bài tập lớn Cơ khí đại cương | Đại học Bách khoa Hà Nội
35 18 -

300 câu hỏi trắc nghiệm ôn tập môn Cơ khí đại cương bản PDF (1) | Đại học Bách Khoa Hà Nội
42 21 -
Thiết kế dầm hộp trong cơ khí
36 18 -
Chương 6: Thiết bị vỏ mỏng | Bài giảng môn Cơ khí ứng dụng | Đại học Bách khoa hà nội
264 132