Bài giảng Chương 7 - Phân tích không gian trạng thái hệ thống LTI môn Tín hiệu và hệ thống | Học viện Công Nghệ Bưu Chính Viễn Thông
Trạng thái của hệ thống tại thời điểm t = t0 (hoặc n = n0) là thông tin tối thiểu đủ để xác định trạng thái và đầu ra của hệ thống tại mọi thời điểm t ≥ t0 (hoặc n ≥ n0) khi biết trước đầu vào của hệ thống tại mọi thời điểm t ≥ t0. Tài liệu được sưu tầm gồm 44 trang, giúp các bạn nắm vững kiến thức, rèn luyện kỹ năng và đạt được kết quả tốt trong học tập. Mời các bạn đón xem!
Môn: Tín hiệu và hệ thống (TEL1368) 11 tài liệu
Trường: Học viện Công Nghệ Bưu Chính Viễn Thông 1.8 K tài liệu
Tác giả:



Preview text:
lOMoAR cPSD| 59031616 CHƯƠNG 7 1 KH NG GIAN TRẠNG TH
I CỦA HỆ THỐNG LTI Ng Thu Trang 5/19/21
Chương 7 — Kh ng gian trạng th i của hệ thống LTI 2
▪ Kh i niệm về trạng th i
▪ Ph n t ch kh ng gian trạng th i của hệ thống LTI li n tục
- M h nh kh ng gian trạng th i
- Nghiệm trong miền tần số của phtr trạng th i
- Nghiệm trong miền thời gian của phtr trạng th i
- Biến đổi tuyến t nh của vector trạng th i
▪ Ph n t ch kh ng gian trạng th i của hệ thống LTI rời rạc
- M h nh kh ng gian trạng th i
- Nghiệm trong miền tần số của phtr trạng th i
- Nghiệm trong miền thời gian của phtr trạng th i lOMoAR cPSD| 59031616
C c kĩ thuật ph n t ch hệ thống 3 - Phương tr nh vi
¥ Tập trung x c định mối quan hệ giữa đầu ra theo đầu v o
ph n/ sai ph n ¥ Hiệu quả cho c c hệ thống tuyến t nh bất - T ch
chập/ Tổng chập biến theo thời gian
¥ Ph hợp với c c hệ thống một đầu v o — - H m truyền đạt một đầu ra
¥ Cho ph p x c định mối quan hệ b n trong
của hệ thống th ng qua c c biến b n
- Phương tr nh trong/ trung gian của hệ thống
¥ Hiệu quả cho cả c c hệ thống phi tuyến v
trạng th i ¥ biPh hến đổợi theo thp cho c c hời gian ệ thống nhiều đầu v o — nhiều đầu ra
Kh i niệm về trạng th i 4
▪ Định nghĩa 1: Đối với c c hệ thống nh n quả
- Trạng th i của hệ thống tại thời điểm t = t0 (hoặc n = n0)
l th ng tin tối thiểu đủ để x c định trạng th i v đầu ra của
hệ thống tại mọi thời điểm t ≥ t0 (hoặc n ≥ n0) khi biết
trước đầu v o của hệ thống tại mọi thời điểm t ≥ t0.
- C c biến chứa th ng tin n y được gọi l c c biến trạng th i lOMoAR cPSD| 59031616
Kh i niệm về trạng th i 5
▪ Định nghĩa 2: Đối với c c mạch điện SI - SO LTI
- Nếu biết được to n bộ th ng tin của đầu v o x(t) trong khoảng
(−∞, t) th sẽ đủ để x c định đầu ra y(t) trong khoảng (−∞, t)
- Nếu chỉ biết đầu v o x(t) của hệ thống trong khoảng (t0, t) th
cần biết c c biến trung gian tại thời điểm t0 (v dụ như d ng
diện qua điện trở, điện p tr n tụ,
) để c thể x c định được
đầu ra y(t) của hệ thống trong khoảng (t0, t)
- C c biến trung gian n y được gọi l trạng th i của hệ thống tại thời điểm t0 5/19/21
Lựa chọn biến trạng th i 6
▪ C rất nhiều c ch lựa chọn c c biến trạng th i cho một hệ thống cho trước
- C c biến trạng th i l đầu ra của c c phần tử c nhớ của hệ thống
- Hệ thống rời rạc gồm c c bộ trễ, bộ cộng, bộ khuếch đại → biến
trạng th i được chọn l đầu ra của bộ trễ
- Hệ thống li n tục gồm bộ t ch ph n, bộ cộng, bộ khuếch đại →biến
trạng th i được chọn l đầu ra của bộ t ch ph n
- Hệ thống li n tục c chứa c c bộ lưu giữ năng lượng vật lý (cuộn
cảm, tụ điện, ) →đầu ra của ch ng được chọn l m biến trạng th i
- C c biến trạng th i l c c biến đạo h m trung gian trong trường
hợp hệ thống được biểu diễn bởi phtr vi ph n/ sai ph n - lOMoAR cPSD| 59031616
th ố ng lin t ụ c 7
▪ Hệ thống Single Input - Single Output CT-LTI được m tả bởi phtr vi ph n sau
Tập c c điều kiện ban đầu l y(0), y(1)(0), , y(N)(0) với y(k)(t) = dky(t)/dtk
→ Định nghĩa N biến trạng th i g1(t), g2(t), , gN(t) như sau: g1(t) = y(t)
ġ1(t) = g2(t) g2(t) = y(1)(t) ġ với ġ1(t) = dgk(t)/d 2(t) = g3(t) t gN(t) = yN-1(t)
ġN(t) = —aNg1(t) — aN—1g2(t) — — a1gN(t) + x(t)
Ph n t ch kh ng gian trạng th i của hệ thống li n tục 8
▪ Viết lại mối quan hệ giữa c c biến trạng th i, đầu v o v đầu ra dưới dạng ma trận
ġ1(t) 0 1 0 0 0 ġ2(t) 0 0 1 0 g 1 ( t ) 0 x(t) g 2 ( t ) a (t ġ — 1 g N )
N(t) —aN — aN—1 — aN—2 1 g 1 ( t) g 2 (t) y(t) 1 0 0 0 g N ( t) lOMoAR cPSD| 59031616
Ph n t ch kh ng gian trạng th i của hệ thống li n tục 9
▪ Định nghĩa vector trạng th i N chiều như sau: g1(t) ġ1(t) g(t) g2(t) dg(t)/dt ġ(t) ġ2(t) gN(t) ġN(t)
→ Hệ thống SI-SO CT-LTI được m tả bởi phtr trạng th i 0 1 0 0 0 A = 0 0 1 ġ(t) = Ag(t) + bx(t) 0 b = 0 y(t) = cg(t) —aN — aN—1 — aN— 2 — a1 1 c = 1 0 0 0
Ph n t ch kh ng gian trạng th i của hệ thống li n tục 10
▪ Hệ thống SI-SO CT-LTI được m tả bởi kh ng gian trạng th i
tổng qu t, biểu diễn c c đại lượng ma trận, như sau ġ(t) = Ag(t) + bx(t) y(t) = cg(t) + dx(t)
Trong đ : Ma trận A(NxN) l ma trận hệ thống
b, c, d l c c vector hệ số gồm N phần tử
▪ Như vậy, c th m một c ch thức nữa để biểu diễn hệ thống
▪ Với mỗi tập điều kiện ban đầu kh c nhau sẽ c ma trận hệ thống kh c nhau
▪ Để x c định đầu ra của hệ thống từ đầu v o v ma trận hệ
thống, cần giải phtr trạng th i lOMoAR cPSD| 59031616
Ph n t ch kh ng gian trạng th i của hệ thống li n tục 11
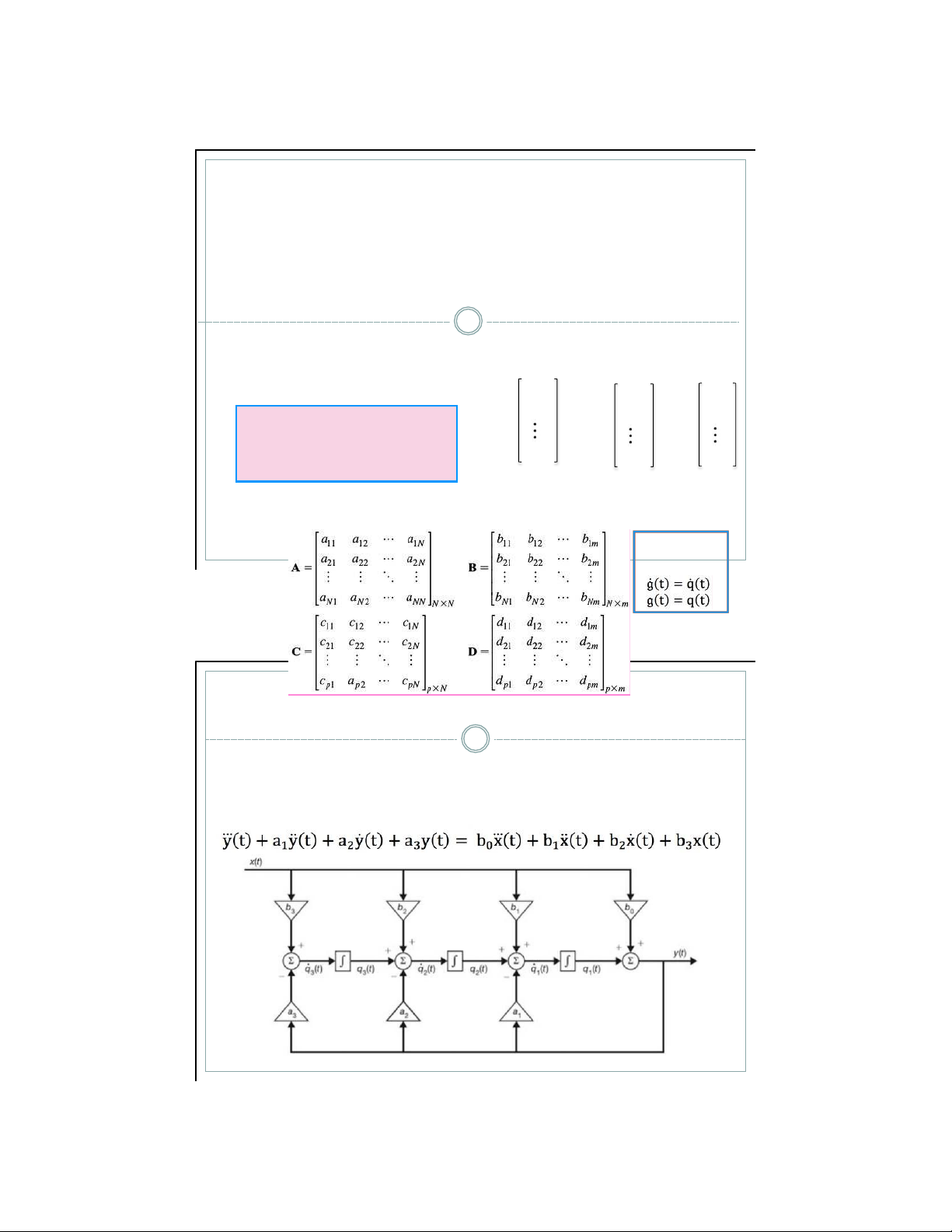
▪ Hệ thống Multi Input - Multi Output CT-LTI gồm m đầu v o, p đầu ra
được m tả bởi kh ng gian trạng th i tổng qu t, r t ra từ hệ thống SI-SO CT-LTI, như sau g1(t) x1(t) y1(t)
g(t) = g2(t) x(t) = x2(t) y(t) = Bx(t) y2(t) ġ(t) = Ag(t) + y(t) = Cg(t) + Dx(t) gN(t) xm(t) yp(t) Trong đ : cc k hi ệ u t ươ ng đươ ng V dụ 1 12
▪ Phtr vi ph n biểu diễn mối quan hệ giữa đầu v o v đầu ra
cho hệ thống li n tục sau lOMoAR cPSD| 59031616 V dụ 1 13
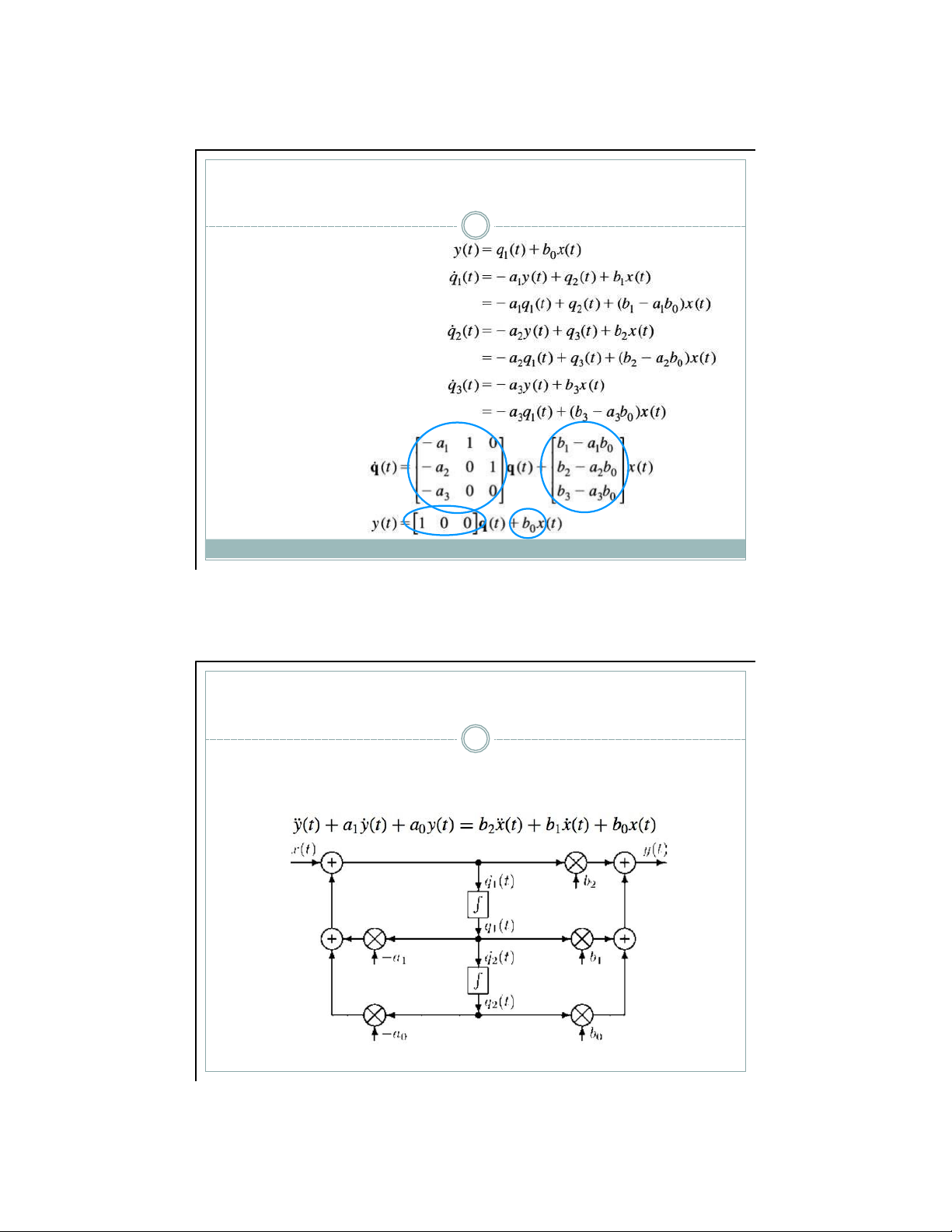
▪ Ch ọ n đầ u ra c ủ a cc b ộ tch phn lm bi ế n tr ạ ng thi q(t):
▪ Vi ế t l ạ i d ướ i d ạ ng ma tr ậ n A B C D 5 /19/21 V dụ 2 14
▪ Phtr vi ph n biểu diễn mối quan hệ giữa đầu v o v đầu ra
cho hệ thống li n tục sau lOMoAR cPSD| 59031616 V dụ 2 15
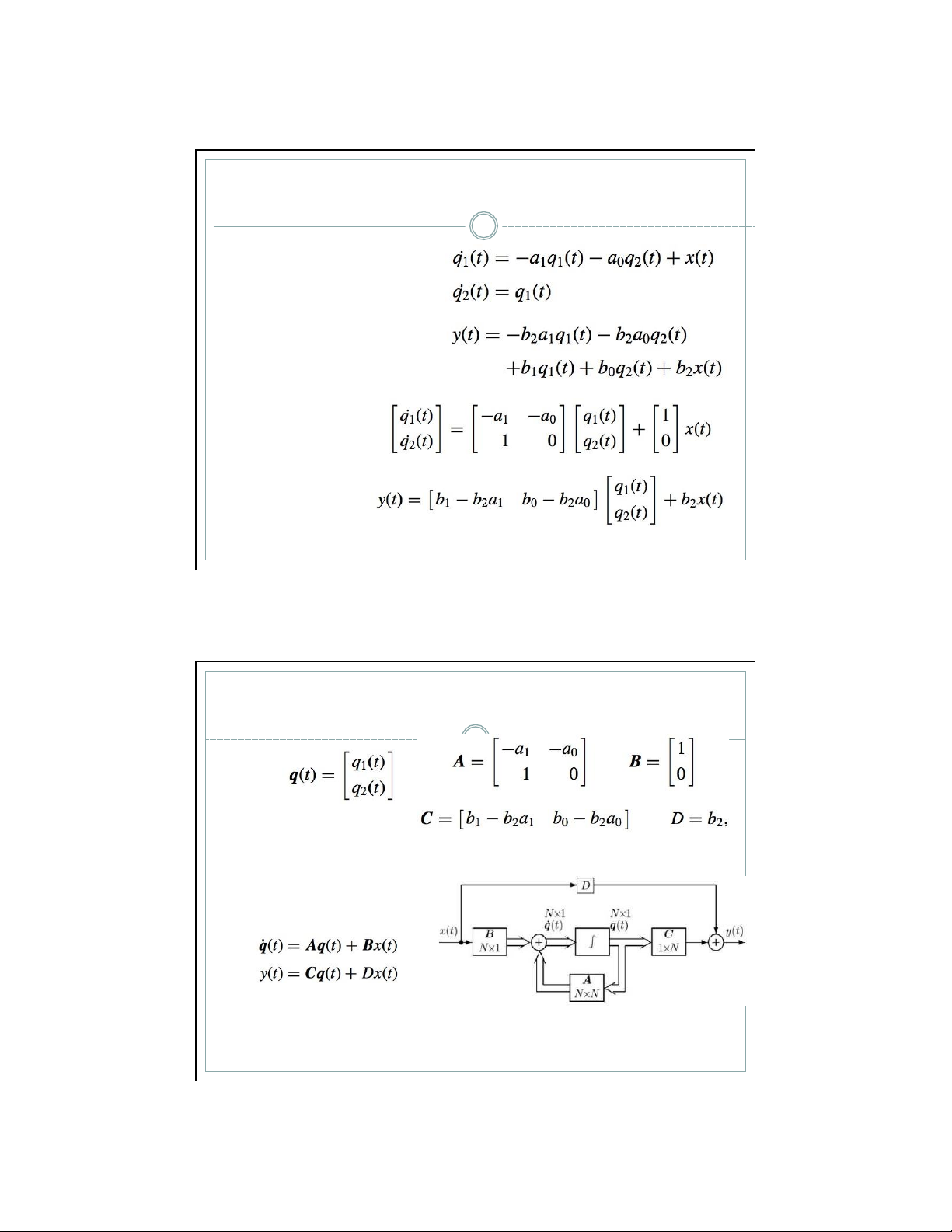
▪ Ch ọ n đầ u ra c ủ a cc b ộ tch phn lm bi ế n tr ạ ng thi q(t): ▪ Đầ u ra y(t) ▪ V ế t l ạ i d ướ i d ạ ng ma tr ậ n 5 /19/21 V dụ 2 16 ▪ M h nh kh ng gian
trạng th i của hệ thống lOMoAR cPSD| 59031616
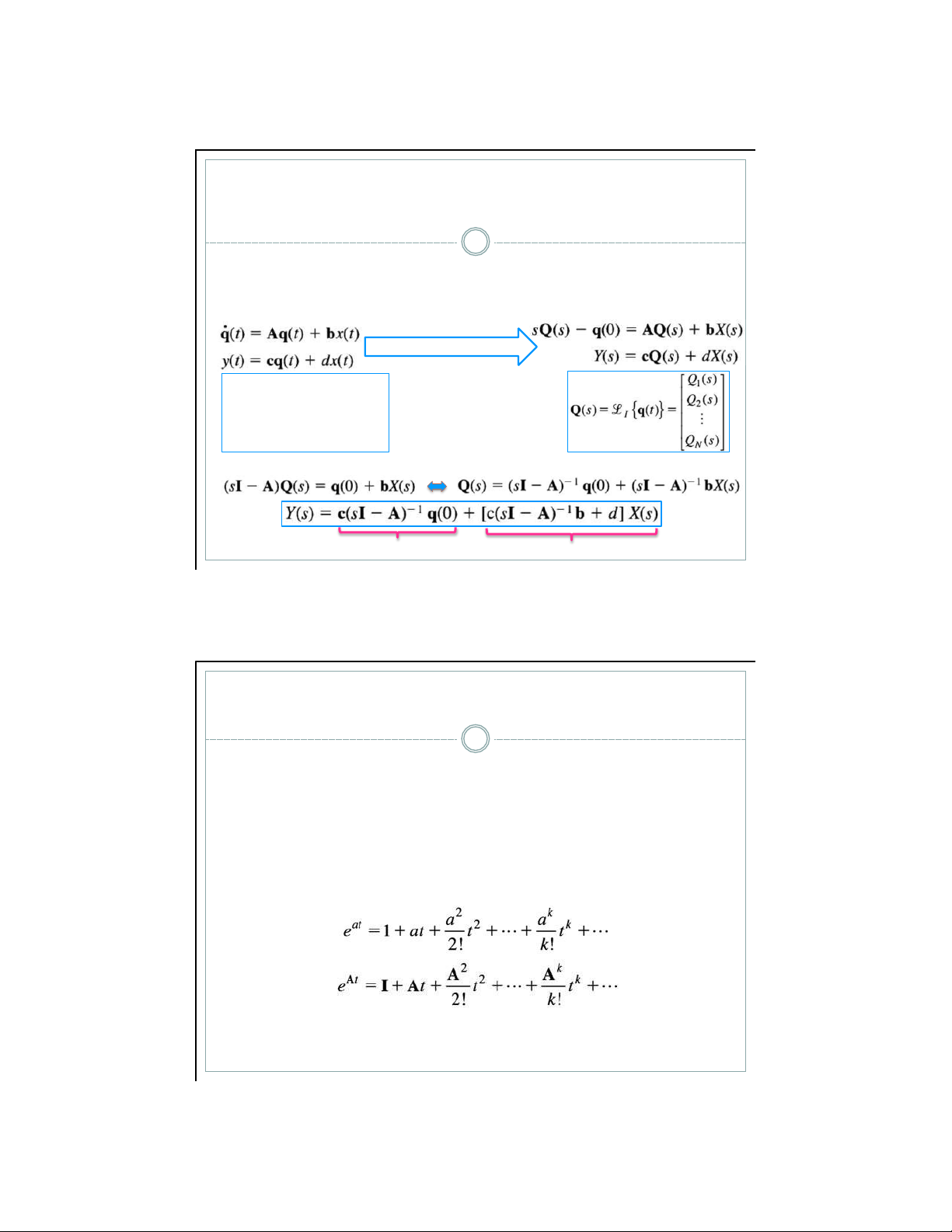
Nghiệm trong miền tần số của phtr trạng th i 17
▪ Giải phtr trạng th i trong miền tần số → thu được nghiệm
trong miền tần số: p dụng biến đổi Laplace
Bi ế n đổ i Laplace m ộ t pha
K ch th ướ c c c ma tr ậ n: A(NxN), b(Nx1), c(1xN), d(1x1)
q(0): tr ạ ng th i ban đầ u
▪ Chuy ể n v ế phtr tr ạ ng thi v nhn hai v
ế v ớ i (s I — A ) — 1, thu đượ c Y(s) đ p ứ ng h ệ th ố ng
đ p ứ ng h ệ th ố ng ở khi đầ u vo b ằ ng 0 tr ạ ng thi 0
Nghiệm trong miền thời gian của phtr trạng th i 18
▪ Giải phtr trạng th i trong miền thời gian → thu được nghiệm trong miền thời gian.
▪ Định nghĩa h m mũ ma trận eAt v đạo h m của n như sau:
▪ p dụng chuỗi v hạn x c định h m mũ của số v hướng a cho trường hợp
h m mũ của ma trận A lOMoAR cPSD| 59031616
Nghiệm trong miền thời gian của phtr trạng th i 19
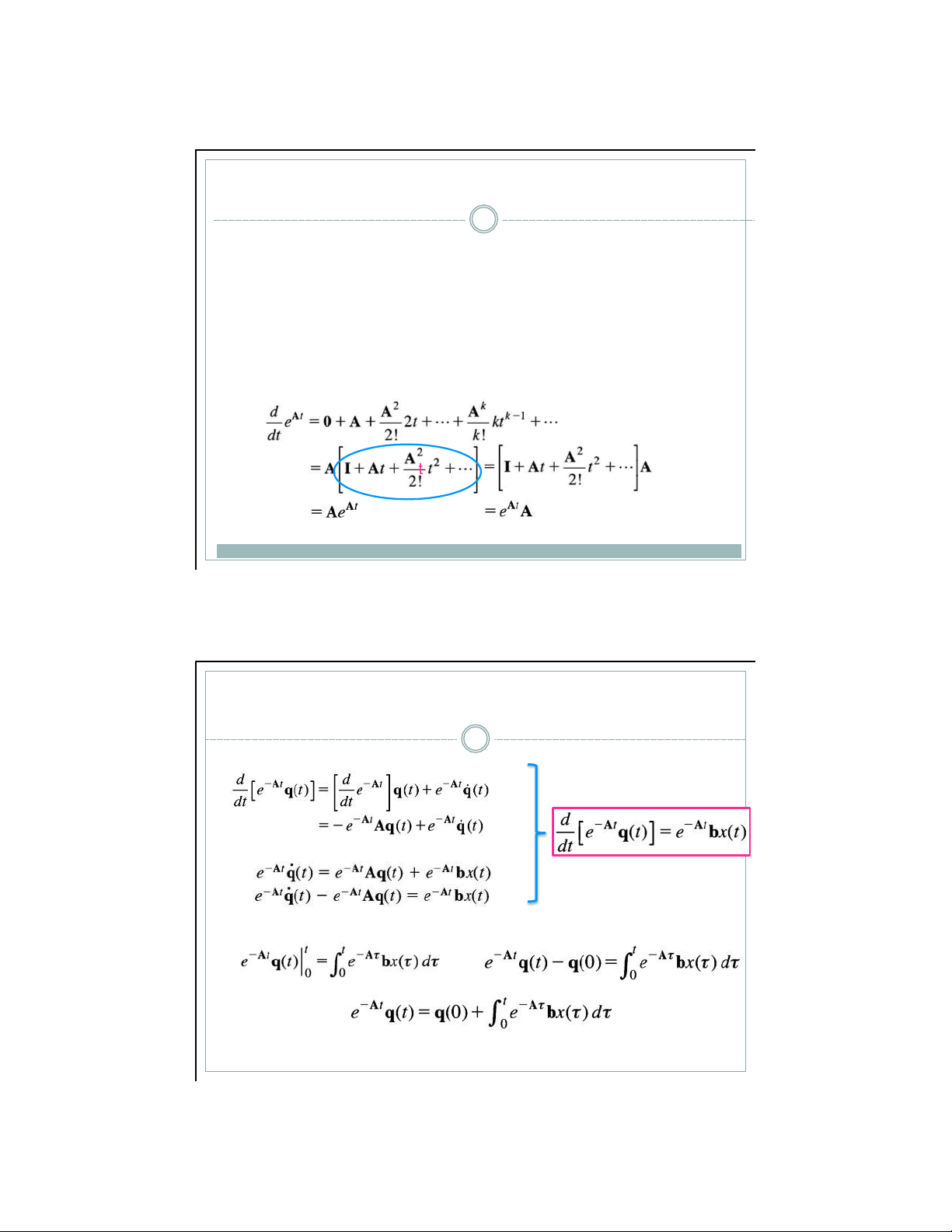
▪ p dụng c c t nh chất sau:
▪ Tại t = 0, ta c : e0 = I với 0 l ma trận 0 k ch thước NxN
▪ eA(t — τ) = eAte—Aτ = e— Aτ eAt → eAt e— At = e— At eAt = e0 = I
▪ Tồn tại nghịch đảo: e— At = (eAt)—1
▪ Lấy đạo h m cả hai ph a khai triển chuỗi eAt theo t eA t 5/19/21
Nghiệm trong miền thời gian của phtr trạng th i 20
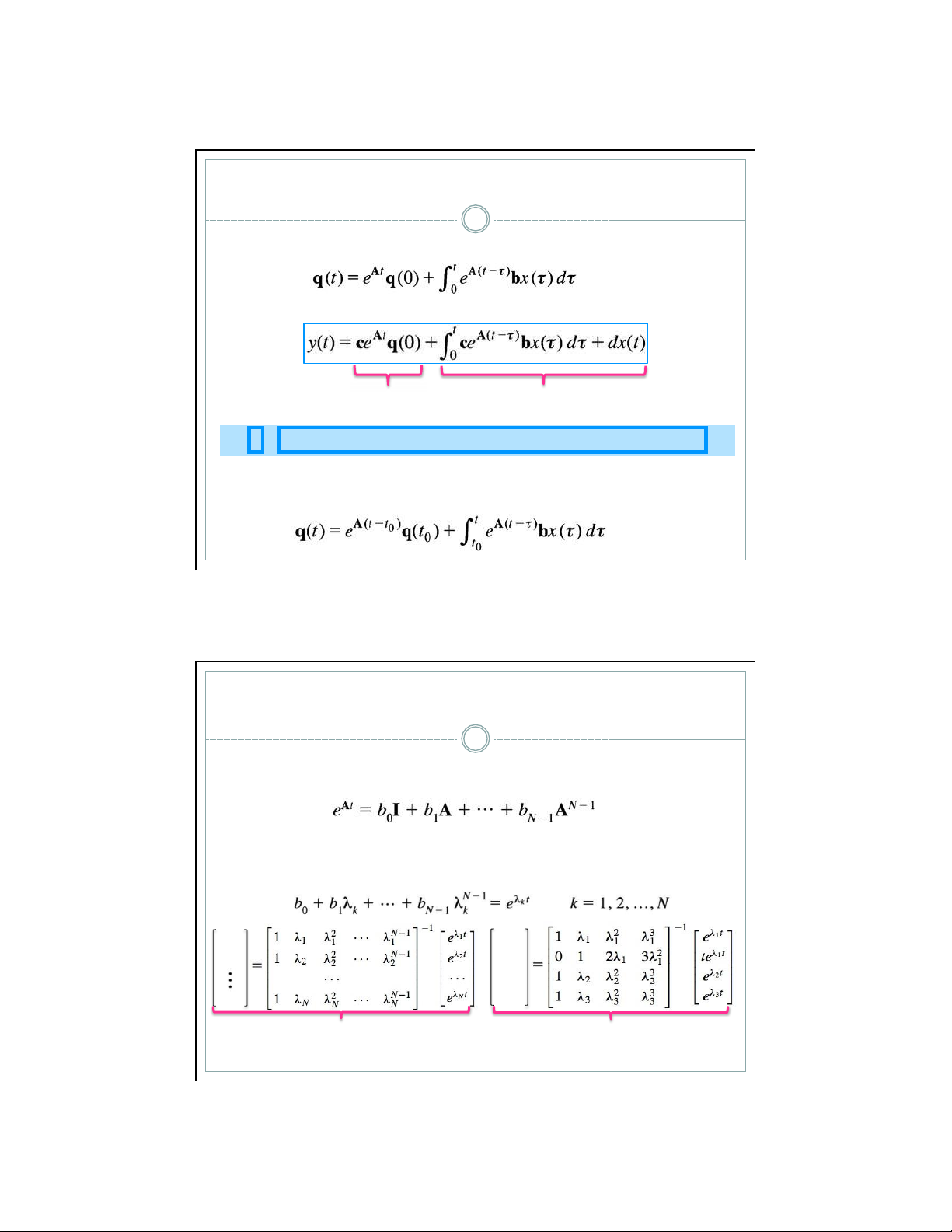
▪ p d ụ ng đạ o hm t ừ ng ph ầ n
▪ Nhn hai v ế phtr tr ạ ng thi v ớ i e — A t
▪ Tnh tch phn bi ể u th ứ c trn trong kho ả ng t t ừ 0 đế n t lOMoAR cPSD| 59031616
Nghiệm trong miền thời gian của phtr trạng th i 21
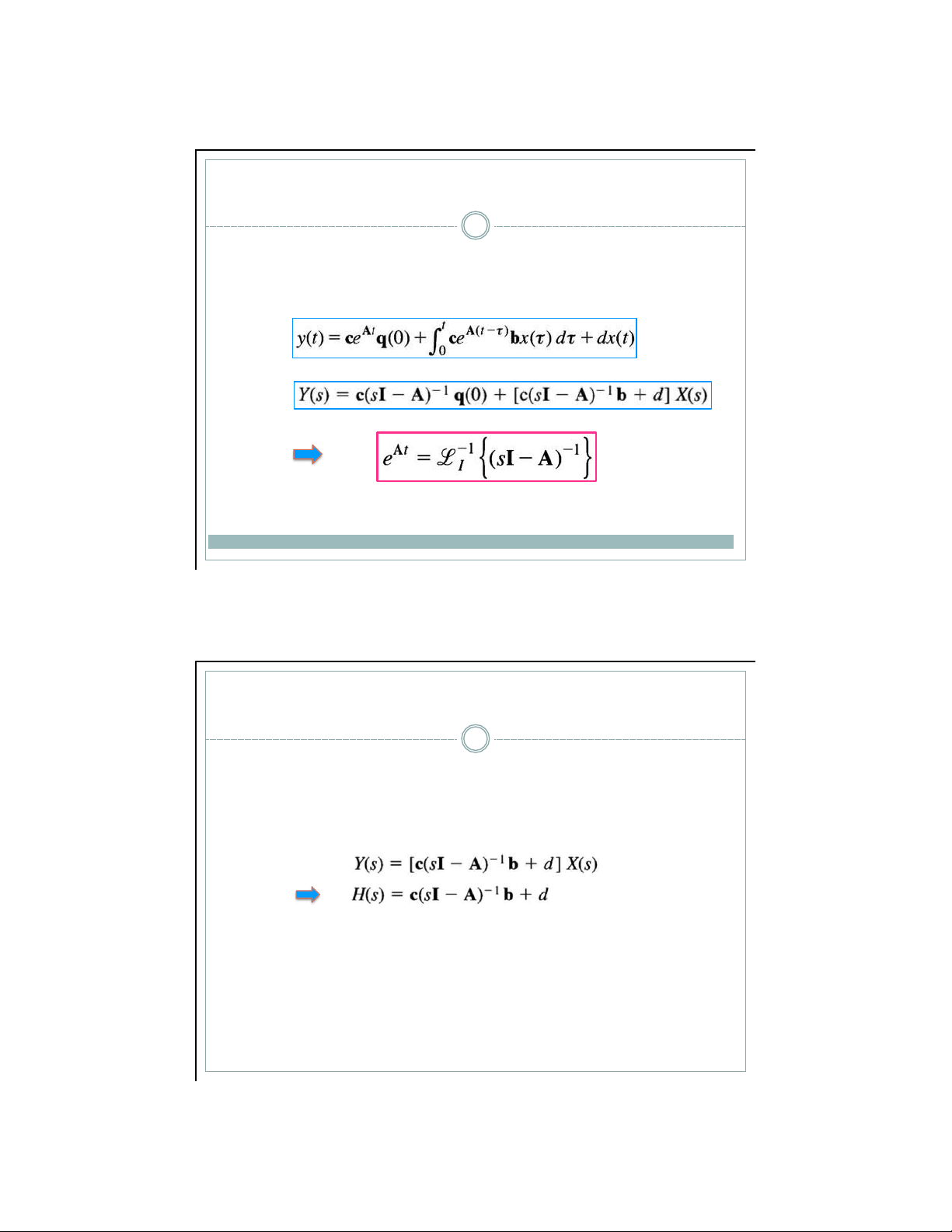
▪ Nhn hai v ế c ủ a e — A tq(t) v ớ i e A t , thu đượ c vector tr ạ ng thi
▪ C vector tr ạ ng thi, tm đượ c nghi ệ m trong mi ề n th ờ i gian
y zi ( t): đ p ứ ng h ệ th ố ng
y zs ( t ) : đ p ứ ng h ệ khi đầ u vo b ằ ng 0 th ố ng ở tr ạ ng thi 0
e At : ma trận chuyển tiếp/ ma trận cơ bản của hệ thống
▪ Nếu trạng th i ban đầu của hệ thống l q(t0) v biết x(t) ∀ t ≥
t0 th vector trạng th i sẽ l (lấy t ch ph n từ t0 đến t) X c định eAt 22
▪ Phương ph p 1: dựa tr n định lý Cayley - Hamilton ▪ Từ
định lý Cayley — Hamilton, ta c :
▪ Nếu c c gi trị ri ng λk của ma trận A l ph n biệt, c c hệ số b0, b1, ,
bN-1 thu được từ phtr điều kiện sau b b 0 0 b b 1 1 b 3 b b N-1 4 Cc h ệ s ố b Cc h ệ s ố b l gi tr ị
k đượ c tnh t ừ N gi tr ị
k trong tr ườ ng h ợ p λ k
ring phn bi ệ t c ủ a ma tr ậ n A
ring kp b ậ c 2 (hng 2 c ủ a ma tr ậ n l đạ o hm theo λ k c ủ a hng 1) lOMoAR cPSD| 59031616
X c định eAt 23
▪ Phương ph p 2: dựa tr n đường ch o ho ma trận A
▪ Nếu tất cả gi trị ri ng λk của ma trận A l ph n biệt, ta c :
▪ Với ma trận P l ma trận đường ch o ho v xk (k = 1, 2, , N) l c c
vector ri ng của ma trận A, được t nh lần lượt như sau
X c định eAt 24
▪ Phương ph p 3: dựa tr n phương ph p ph n t ch phổ ma trận A
▪ Với N gi trị ri ng λk (k = 1, 2,
, N) ph n biệt của ma trận A, t
m c c ma trận cấu th nh Ek sao cho ▪ Khi đ, thu được lOMoAR cPSD| 59031616
X c định eAt 25
▪ Phương ph p 4: sử dụng biến đổi Laplace
▪ So s nh giữa nghiệm trong miền thời gian v miền tần số 5/19/21
Ph n t ch kh ng gian trạng th i của hệ thống li n tục 26
▪ H m truyền đạt hệ thống H(s)
▪ H m truyền đạt của hệ thống CT-LTI sẽ l H(s) = Y(s)/X(s) với
điều kiện ban đầu bằng 0, tức l q(0) = 0, do vậy ▪ Hệ thống ổn định
▪ Nếu c c gi trị ri ng λk của ma trận hệ thống A c phần thực m, tức l Re{λk} < 0 ∀k
th hệ thống được gọi l tiệm cận ổn định | 27
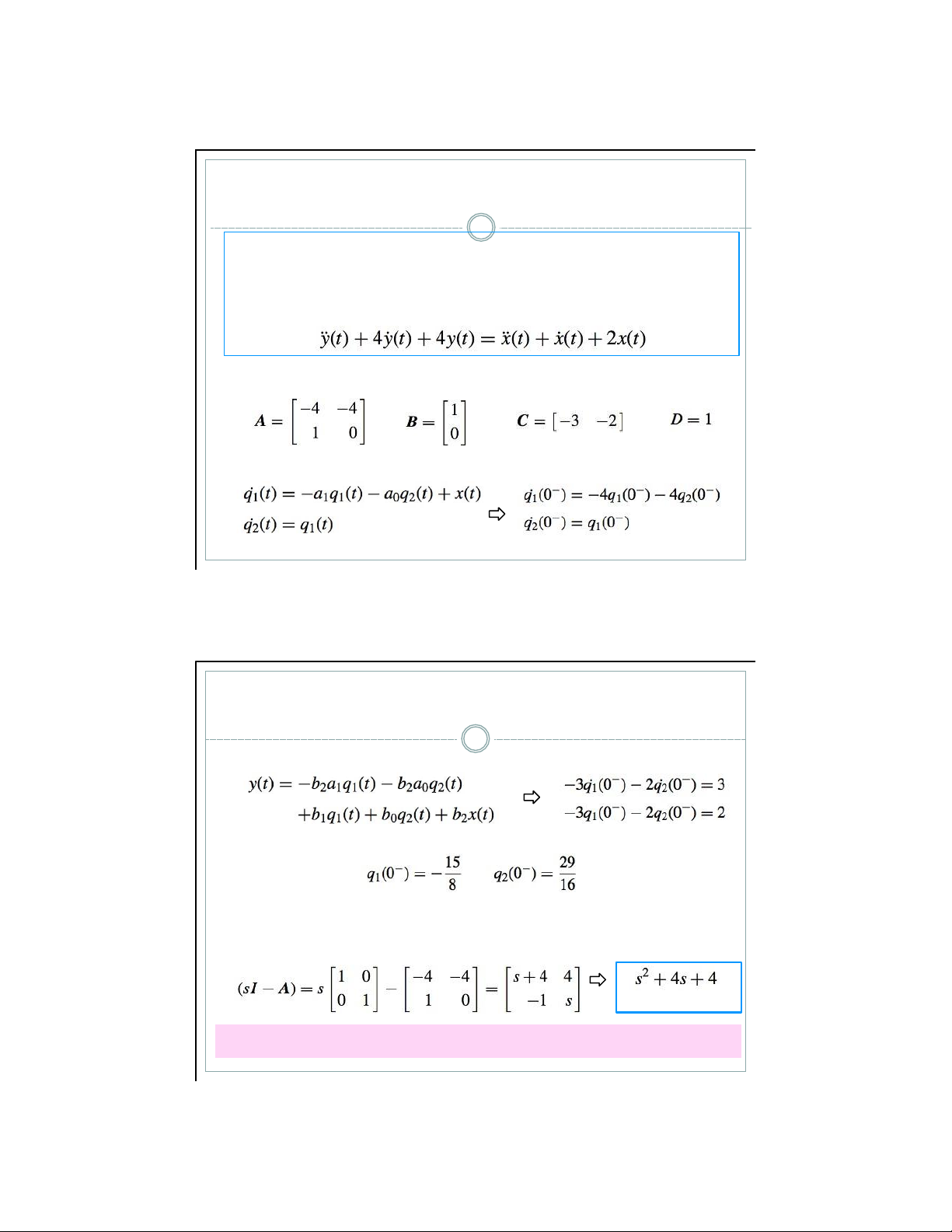
▪ Xc đị nh đầ u ra y(t) c ủ a h ệ th ố ng đượ c m t ả b ở i phtr vi
phn sau s ử d ụ ng ph ươ ng php trong mi ề n th ờ i gian v ớ i
đ i ề u ki ệ n ban đầ u y(0 — ) = 2 v ý (0 — ) = 3 v đầ u vo l u(t) ▪
p d ụ ng v d ụ 2, thu đượ c cc ma tr ậ n sau
▪ Thay đ i ề u ki ệ n ban đầ u vo vector tr ạ ng thi v phtr tr ạ ng thi: 5 /19/21 V dụ 3 28
▪ Ch ý rằng x(t) = u(t) → x(0—) = 0. Thay v o phtr đầu ra, ta c
▪ Gi ả i cc phtr trn, thu đượ c vector tr ạ ng thi ban đầ u
▪ Phtr đặc trưng của hệ thống thu được từ định thức của ma
trận (sI — A) như sau (cũng c thể thu được từ phtr sai ph n) Phtr đặ c tr ư ng
Với c ng một hệ thống c nhiều c ch lựa chọn biến trạng th i kh c nhau n n c thể
c nhiều ma trận A kh c nhau, tuy nhi n phtr đặc trưng lu n kh ng đổi | 29
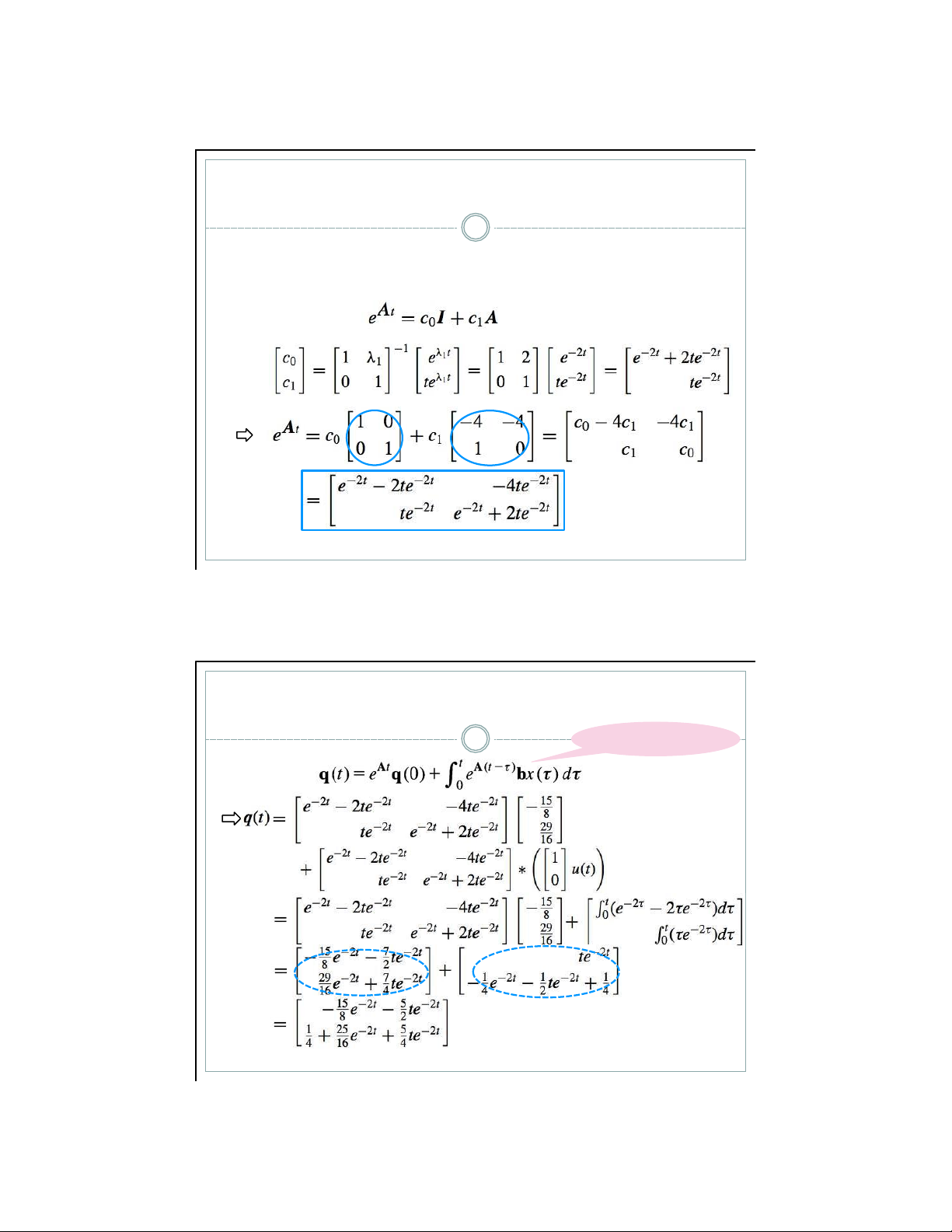
▪ Phtr đặc trưng c nghiệm k p λ1 = λ2 = —2, p dụng định lý
Caley — Hamilton để t m eAt, ta c v ớ i I A V dụ 3 30 ▪ Tch ch
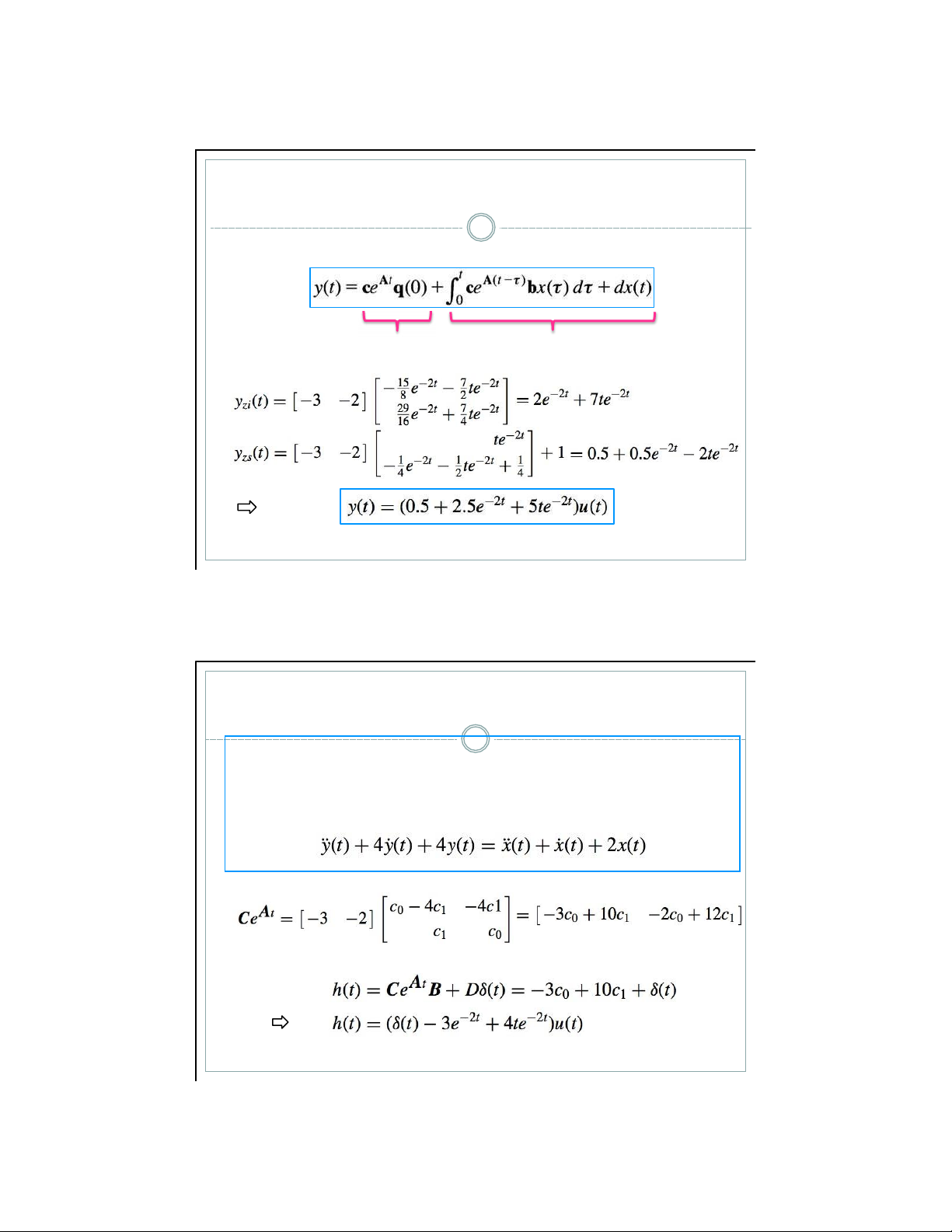
Xc đị nh vector tr ạ ng thi ậ p e A t q (0)
Tch ch ậ p | 31
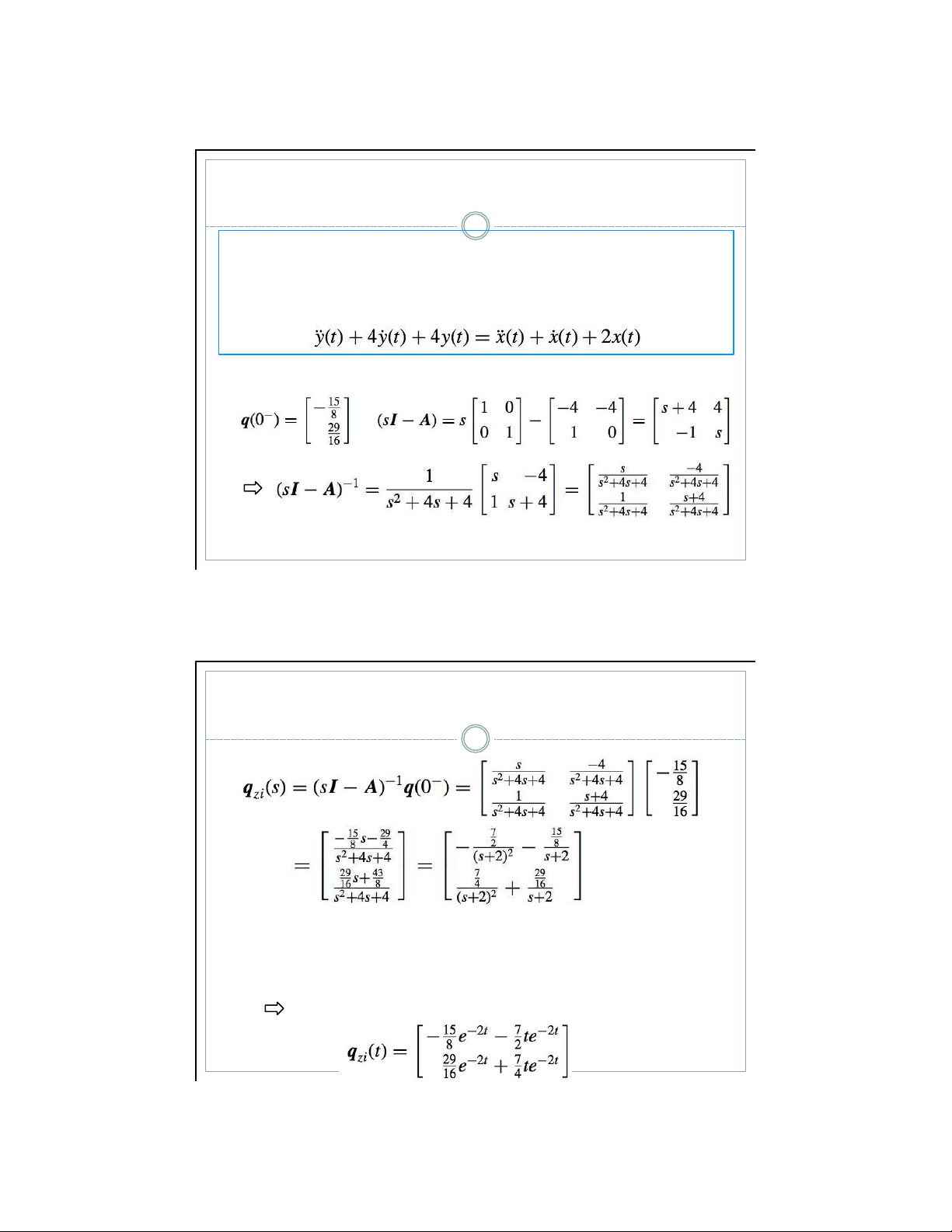
▪ Xc đị nh đầ u ra y(t)
y zi ( t): đ p ứ ng h ệ th ố ng
y zs ( t ) : đ p ứ ng h ệ khi đầ u vo b ằ ng 0 th ố ng ở tr ạ ng thi 0 5 /19/21 V dụ 4 32
▪ X c định đp ứng h(t) của hệ thống được m tả bởi phtr vi ph
n như trong v dụ 3 sử dụng phương ph p trong miền thời gian
▪ T nh tương tự v dụ 3 qua c c biến trạng th i, thu được
▪ Đầ u vo h ệ th ố ng l δ ( t) đầ u ra l đ p ứ ng h(t) c ủ a h ệ th ố ng: V dụ 5 33
▪ Xc đị nh đầ u ra y(t) c ủ a h ệ th ố ng đượ c m t ả b ở i phtr vi
phn nh ư trong v d ụ 3 s ử d ụ ng ph ươ ng php trong mi ề n t ầ n s ố
▪ Từ v dụ 3 thu được vector trạng th i ban đầu v ma trận (sI — A) 5 /19/21 V dụ 5 34
▪ Vector trạng th i khi đầu v o hệ thống bằng 0
▪ Thực hiện biến đổi Laplace ngược lOMoAR cPSD| 59031616 5 35
▪ Vector tr ạ ng thi khi khi h ệ th ố ng ở tr ạ ng thi 0
▪ Th ự c hi ệ n bi ế n đổ i Laplace ng ượ c
▪ Sử dụng phtr đầu ra, thay gi trị vector trạng th i v c c ma
trận hệ số A, B, C, D → thu được y(t) như trong v dụ 3 5/19/21 V dụ 6 36
▪ X c định đp ứng h(t) của hệ thống được m tả bởi phtr vi ph
n như trong v dụ 3 sử dụng phương ph p trong miền tần số
▪ Ta c hm truy ề n đạ t c ủ a h ệ th ố ng
▪ Th ự c hi ệ n bi ế n đổ i Laplace ng ượ c: lOMoAR cPSD| 59031616
Biến đổi tuyến t nh của vector trạng th i 37
▪ Với một hệ thống cho trước, c kh ng giới hạn c ch lựa chọn
biến trạng th i với một hệ thống biết trước mối quan hệ
giữa đầu v o v đầu ra, c kh ng giới hạn cấu tr c b n trong kh c
nhau →c nhiều vector trạng th i kh c nhau cho c ng một hệ thống
▪ Biến đổi tuyến t nh của vector trạng th i: x c định vector
trạng th i mới từ vector trạng th i đ c
▪ Hệ thống c vector trạng th i q → x c định vector trạng th i
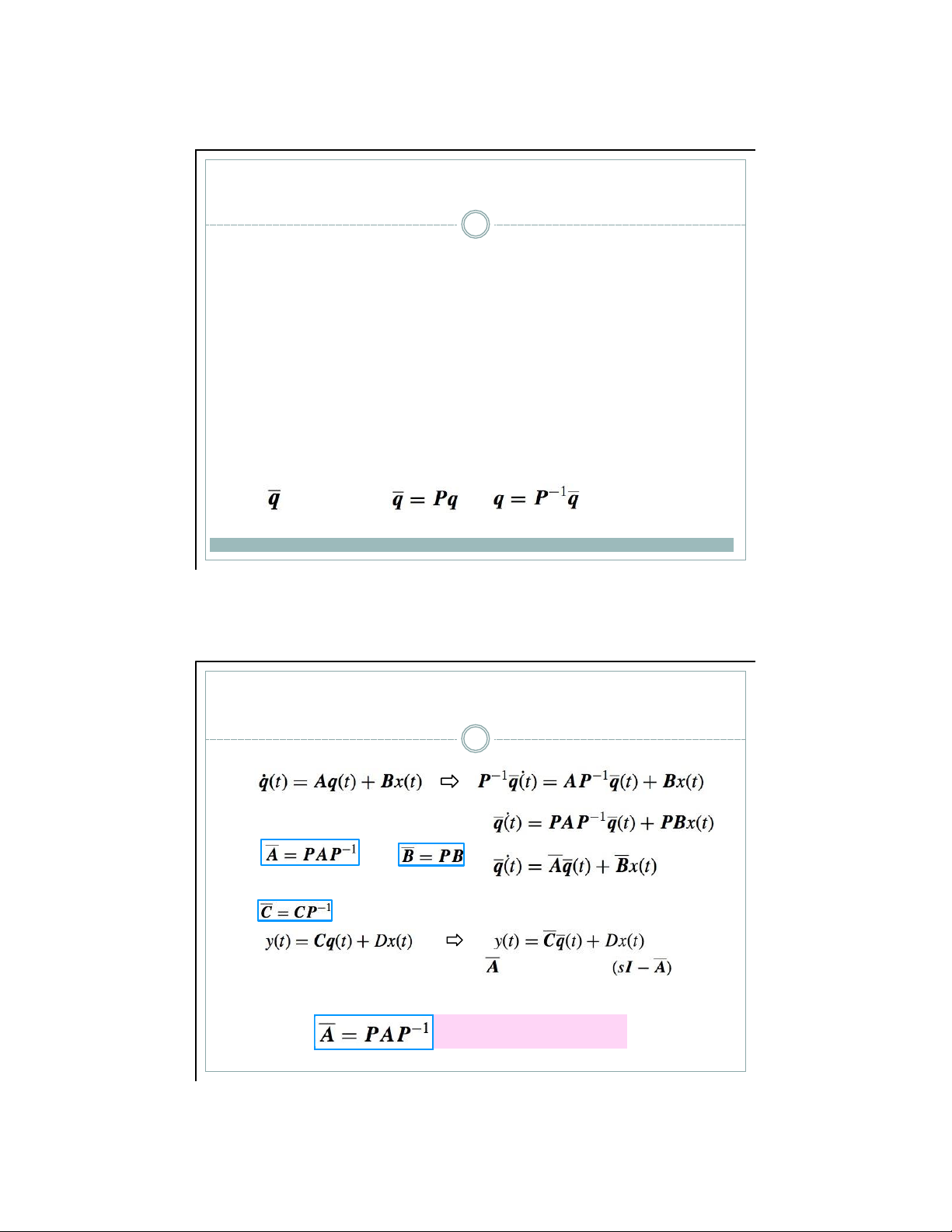
mới th ng qua ma trận kh ng suy biến bất k P (NxN) v tồn tại P—1, sao cho v 5/19/21
Biến đổi tuyến t nh của vector trạng th i 38
▪ Phương tr nh trạng th i mới thu được từ vector trạng th i mới
▪ Nhn c ả hai v ế v ớ i P , ta c ▪ Đặ t v
thu đượ c phtr tr ạ ng thi m ớ i
▪ Đặ t thu đượ c phtr đầ u ra
▪ Đị nh th ứ c c ủ a cc c ặ p ma tr ậ n (A v ) v ( ( s I — A ) v ) l nh ư
nhau → phtr đặ c tr ư ng khng đổ i
Biến đổi tuyến t nh lOMoAR cPSD| 59031616 V dụ 7 39
▪ Xc đị nh vector tr ạ ng thi m ớ i c ủ a h ệ th ố ng bi ế t
▪ Phtr tr ạ ng thi ban đầ u c ủ a h ệ th ố ng t ừ vector tr ạ ng thi ban đầ u
▪ M ố i quan h ệ gi ữ a vector tr ạ ng thi m ớ i v ớ i vector tr ạ ng thi c ũ
▪ Ch ứ ng minh r ằ ng hm truy ề n đạ t gi ố ng nhau trong hai tr ườ ng h ợ p 5 /19/21 V dụ 7 40 ▪ Ta c
▪ H m truyền đạt của hệ thống khi sử dụng vector trạng th i mới: V dụ 7
Tài liệu liên quan:
-

Bài giảng Mô phỏng hệ thống truyền thông môn Tín hiệu và hệ thống | Học viện Công Nghệ Bưu Chính Viễn Thông
53 27 -

Bài giảng Chương 6 - Biến đổi z và phân tích hệ thống LTI rời rạc môn Tín hiệu và hệ thống | Học viện Công Nghệ Bưu Chính Viễn Thông
112 56 -

Bài giảng Chương 4 - Phân tích tín hiệu và biến đổi Fourier rời rạc môn Tín hiệu và hệ thống | Học viện Công Nghệ Bưu Chính Viễn Thông
106 53 -

Bảng tham chiếu - Tài liệu hỗ trợ biến đổi Fourier và Laplace môn Tín hiệu và hệ thống | Học viện Công Nghệ Bưu Chính Viễn Thông
144 72