Bài thí nghiệm 5: ĐIều khiển hồi tiếp biến trạng thái | Bộ môn hệ thống điện - điện tử ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
Hệ thống xe – lò xo bao gồm 2 xe và 2 lò xo liên kết nối tiếp nhau. Trong bài thí nghiệm này sinh viên sẽ xây dựng phương trình biến trạng thái mô tả hệ thống xe – lò xo, Sau đó sẽ xây dựng bộ điều khiển hồi tiếp biến trạng thái để điều khiển vị trí của xe 1 hoặc vị trí của xe 2 theo giá trị đặt mong muốn. Tài liệu giúp bạn tham khảo, ôn tập và đạt kết quả cao. Mời bạn đọc đón xem!
Môn: Hệ thống điện - Điện tử ô tô (AEES330233) 18 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:




Preview text:
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
BI TH NGHIM 5
ĐIU KHIN HI TIP BIN TRNG THI I. MC ĐCH
H thng xe – l xo bao gm 2 xe v 2 l xo liên kt ni tip nhau. Trong bài thí
nghim này sinh viên sẽ xây dng phương trnh bin trng thi mô t h thng xe – l
xo. Sau đ sẽ xây dng b điu khin hi tip bin trng thi đ điu khin v tr ca
xe 1 hoc v tr ca xe 2 theo gi tr đt mong mun.
Da vào các kt qu thu thập được từ đp ứng thi gian, sinh viên sẽ tm được cc
thông s ca mô hnh xe – l xo như: đ cứng ca l xo, h s ma st. Sau khi tm
được cc thông s ny, sinh viên sẽ xây dng được phương trnh bin trng thi mô t h thng xe – l xo.
Ngoài ra, bài thí nghim còn gip sinh viên hiu r nh hưng ca b điu khin
hi tip bin trng thi lên cht lượng h thng điu khin.
Mục tiêu sau khi hoàn thành bài thí nghiệm này:
Bit cách xây dng và mô phỏng mô hnh điu khin h thng xe – l xo dng
phương php điu khin hi tip bin trng thi.
Bit cch thu thập d liu v nhận dng mô hnh đi tượng xe – l xo.
Đnh gi được cht lượng điu khin dng phương php điu khin hi tip bin trng thi.
II. CƠ S L THUYT
2.1. Mô t ton hc hệ xe – l xo
Mô hnh h xe – l xo được mô t như Hnh 1. H thng bao gm 2 xe vi
trng lượng m1, m2 liên kt vi 2 l xo c đ cứng k1, k2. Lc F tc đng vo xe m2 đ điu khin v t r xe 2 đn v t
r x2 mong mun hoc điu khin v t r xe 1 đn v tr x1 mong mun.
Hnh 1. Mô hnh hệ xe – l xo
Phương trnh vi phân mô t h thng như sau: m x 2 2 2 2 2 2 1 (1) m 1 1 2 2 1 1 1 1 1
trong đ b1 l h s ma st ca xe 1 v b2 l h s ma st ca xe 2. 1/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
Trong mô hnh th nghim h xe – l xo, lc tc đng F được cung cp bi đng
cơ ĐC. Nu bỏ qua phn cm ứng ta c th xp x lc tc đng F t l thuận vi đin p cung cp: F Ku (2)
trong đ, u l đin p cung cp cho đng cơ ĐC, K l h s t l. Phương trnh bin
trng thi mô t h thng (1) được vit li: 0 1 0 0 0 x k k b k x 1 ( ) 1 2 1 2 1 0 0 x 1 1 1 2 1 0 u (3) x 0 0 0 1 x 2 2 K x 2 2 2 2 2 0 m 2 m m m 2 2 2 y 1 0 0
0 x : nu điu khin v tr x1 y 0 0 1
0 x: nu điu khin v tr x2
2.2. Tm thông s ca hệ xe – l xo bng thc nghiệm
Trong phn ny, chng ta sẽ xây dng công thức tm cc thông s chưa bit ca
h xe – l xo: đ cứng k1, k2 ca l xo; h s ma st b
1, b2 ca xe; v h s t l K .
2.2.1. Xây dng công thc tm k1 , b1
Gi T l chu k ly mu tn hiu, đo hm bậc 1 v đo hm bậc 2 ca tn hiu
x(t) ti thi đim kT được tnh như sau: 1 x (
x kT ) x(kT T ) (4) T 1 hay vit tt: x
x(k) x(k 1) T 1
x(kT T) 2x(kT) x(kT T ) (5) 2 T 1 hay vit tt: (
x k 1) 2x(k) x(k 1) 2 T
Gi s đ cứng ca 2 l xo l ging nhau v c gi tr k k k , phương 1 2 12
trnh thứ nht ca (1) được vit li: 2 k T
2 x (k) x (k) b T x (k) x (k 1) 12 1 2 1 1 1 (6) m
x (k 1) 2x (k ) x (k 1) 1 1 1 1
Nu khi lượng xe m bit trưc th phương trnh (6) cn 2 n cn tm l k v 1 12
b . Ti mi thi đim ly mu kT ta sẽ c 1 phương trnh (6), thu thập N mu d liu 1
ta c (N - 2) phương trnh như sau: . (7) 2/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM Trong đ 2
T 2x (2) x (2)
T x (2) x (1) 1 2 1 1 2
T 2x (3) x (3)
T x (3) x (2) 1 2 1 1 ... ... 2 T
2x (N 1) x (N 1) T x (N 1) x (N 2) 1 2 1 1 m
x (3) 2x (2) x (1) 1 1 1 1 k m
x (4) 2x (3) x (2) 1 1 1 1 12 , b ... 1 m
x (N ) 2x (N 1) x (N 2) 1 1 1 1
Gii phương trnh (7) ta tm được k v b : 12 1 1 T T (8)
2.2.2. Xây dng công thc tm K, b2
Khai trin tương t như Mc 2.2.1, phương trnh thứ 2 ca (1) được vit li như sau: 2
T Ku(k ) b T x (k) x (k 1) 2 2 2 (9)
m x (k 1) 2x (k) x (k 1) 2
k T x (k) x (k) 2 2 2 2 12 2 1
Nu khi lượng xe m bit trưc v đ cứng l xo k đ tm được (8) th 2 12
phương trnh (9) cn 2 n cn tm l K v b . Ti mi thi đim ly mu kT ta sẽ c 2
1 phương trnh (9), thu thập N mu d liu ta c (N - 2) phương trnh như sau: . (10) Trong đ 2 T ( u 2)
T x (2) x (1) 2 2 2 T u(3)
T x (3) x (2) K 2 2 , ... ... b 2 2 T u(N 1) T
x (N 1) x (N 2) 2 2
m x (3) 2 x (2) x (1) 2
k T x (2) x (1) 2 2 2 2 12 2 1
m x (4) 2x (3) x (2) 2
k T x (3) x (2) 2 2 2 2 12 2 1 ... m
x ( N) 2x ( N 1) x (N 2) 2
k T x ( N 1) x ( N 2) 2 2 2 2 12 2 1 3/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
Gii phương trnh (10) ta tm được K v b : 2 1 T T (11)
2.3. Điu khin hi tip bin trng thi
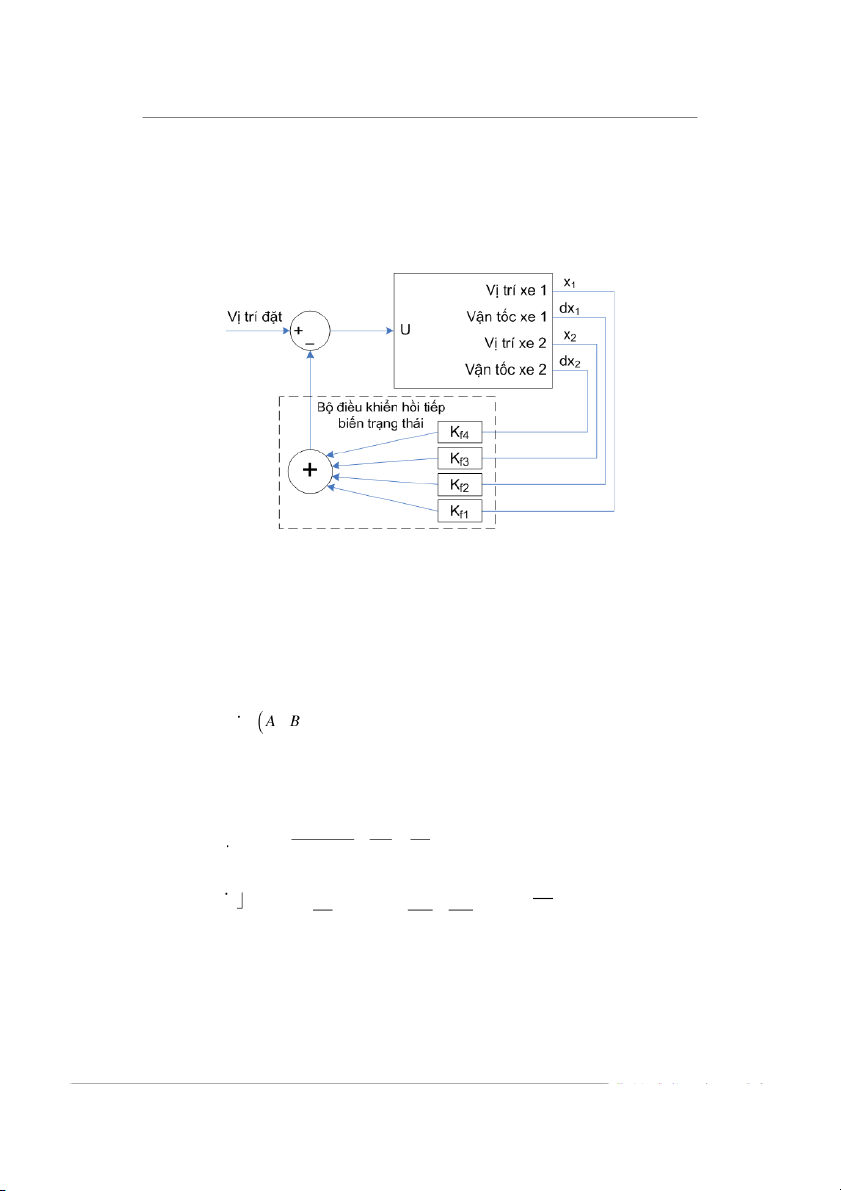
Hnh 2. Cu trc bộ điu khin hi tip bin trng thái
Sơ đ b điu khin hi tip bin trng thi được mô t như Hnh 2. Đi vi
h xe – l xo chng ta sẽ điu khin hi tip 4 tn hiu trng thi: v tr xe 1, vận tc xe
1, v tr xe 2, vận tc xe 2. H s hi tip cho 4 trng thi l: K K K K K (12) f f 1 f 2 f 3 f 4
Phương trnh bin trng thi ca h vng kn sẽ l: x K f x Bu (13) y Cx Trong đ: 0 1 0 0 0 x 1 (k k ) b k 1 2 1 2 0 0 x m m m 1 1 1 2 x , A , B 0 (14) x 0 0 0 1 2 K x k k b 2 2 2 2 0 m 2 m m m 2 2 2 C 1 0 0
0 nu điu khin v tr x1
C 0 0 1 0 nu điu khin v tr x2 4/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
III. MÔ T TH NGHIM
3.1. Phần cn g
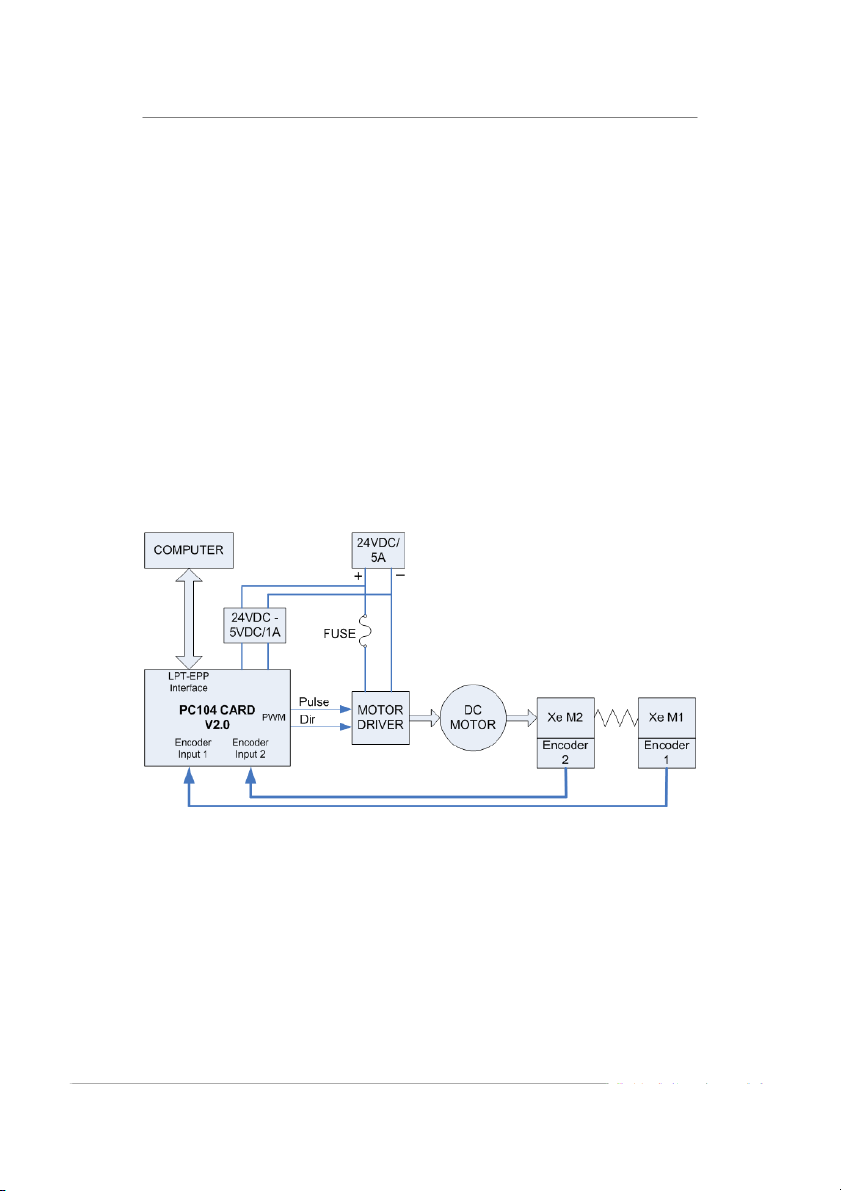
Sơ đ khi phn cứng được mô t như Hnh 3. Trong đ, bo mch
PC104CARD l phn cứng trung tâm trong bi th nghim. Bo mch PC104CARD
xây dng trên nn tng FPGA ca Altera có kh năng giao tip vi máy tính thông
qua phn mm Matlab/ Simulink/ Real-time Windows Target vi các tnh năng sau:
• Điu rng xung (PWM): 4 kênh đ phân gii 0.1% (~ 10bit).
• Encoder: 4 kênh encoder x4.
• Giao tip vi my tnh thông qua cng my in theo chun EPP.
Đng cơ DC s dng trong bi th nghim c đin p đnh mức 24VDC v
encoder gn trên xe c đ phân gii 2048 xung/vng. Tn hiu điu rng xung Pulse
v hưng Dir sẽ điu khin đng cơ chy vi tc đ v chiu quay mong mun:
• Đin p cp cho đng cơ sau khi qua Motor Driver sẽ bng T
* 24 /1000 (V), trong đ T
l gi tr điu rng xung từ (0 – 1000) PWM PWM
tương ứng vi đ phân gii 0.1%.
• V tr (đơn v: mm) v tc đ (đơn v: mm/s) ca xe được tnh theo phương
php đo s xung trong mt chu k ly mu T = 2ms.
Hnh 3. Sơ đ phn cng bi th nghiệm
3.2. Phần mm
Phn mm s dng trong cc bi thí nghim ny l b phn mm Matlab/
Simulink/ Real-time Windows Target. Công c Real-time Windows Target cho php
mô hnh Simulink c kh năng kt ni vi phn cứng bên ngoi v chy theo thi gian
thc. Đ biên dch v chy mô hnh Simulink liên kt vi phn cứng sinh viên phi
thc hin trnh t cc bưc sau: 5/14
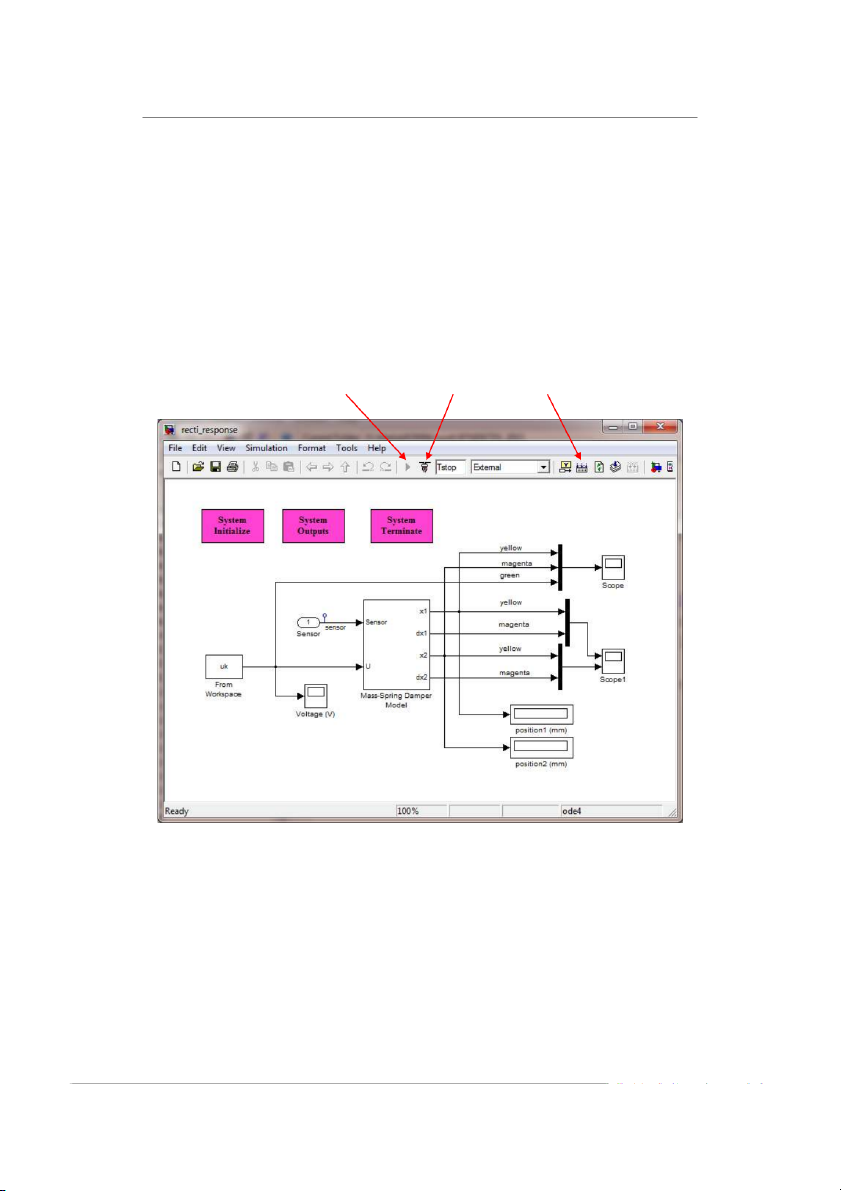
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM • To hoc m mt f
ile simulink như Hnh 4.
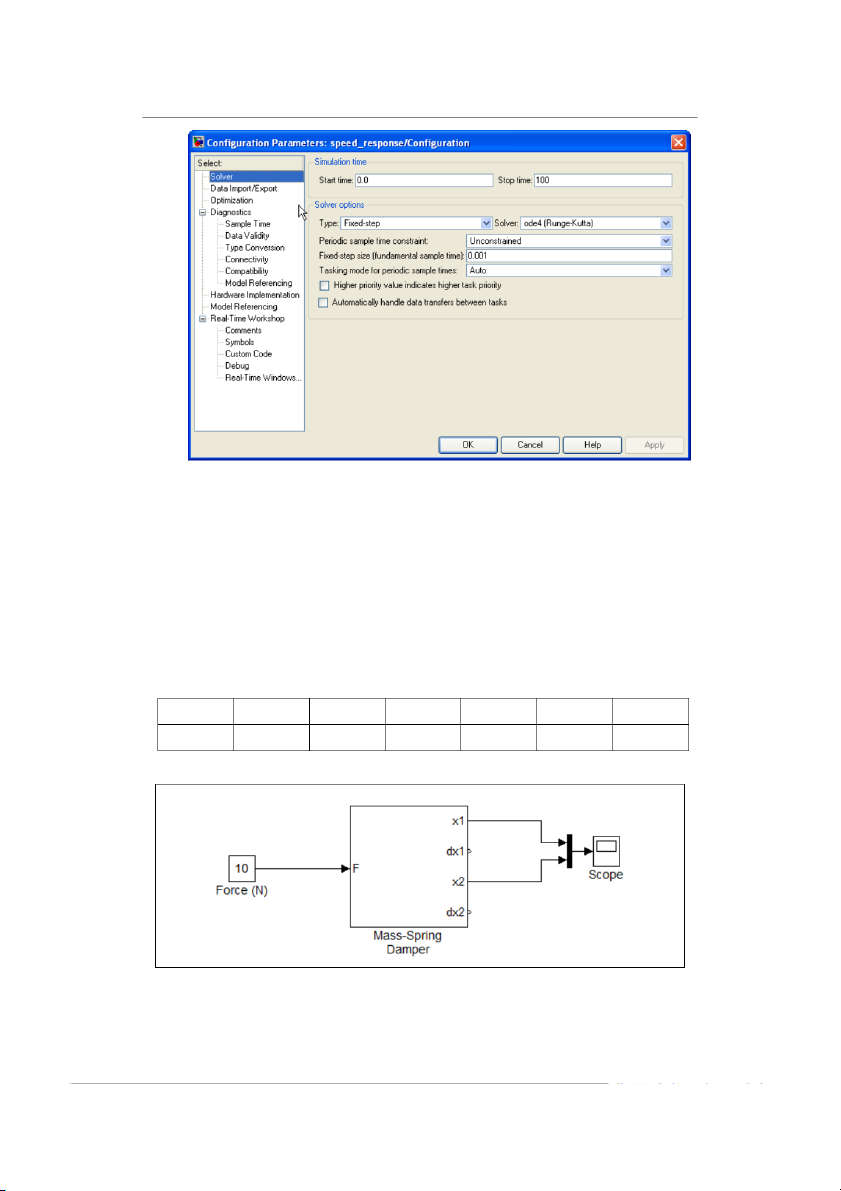
• Vo menu Simulation -> Configuration, chn mc Solver đ ci đt cc
thông s v thi gian mô phỏng (Simulation time) v phương php mô
phỏng (Solver Options) như Hnh 5.
• Vo menu Tool -> Real-Time Workshop -> Build Model (hoc nhn
chut tri vo biu tượng Incremental Build) đ biên dch mô hnh.
• Sau khi mô hnh biên dch thnh công, vo menu Simulation -> Connect
To Target (hoc nhn chut tri vo biu tượng Connect To Target) đ
kt ni mô hnh Simulink ti phn cứng.
• Vo menu Simulation -> Run (hoc biu tượng Run) đ tin hnh chy mô hnh. Run Connect To Target Incremental Build
Hnh 4. Mô hnh Simulink kt ni phn cng 6/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM Hnh 5. Ci
đ t các thông s mô phng
IV. CHUN B TRƯC TH NGHIM
4.1. Xây dng mô hnh hệ xe – l xo
Đ thc hin tt thí nghim trên lp, sinh viên cn chun b trưc phn lý
thuyt và thc hin mô phỏng trên máy tính.
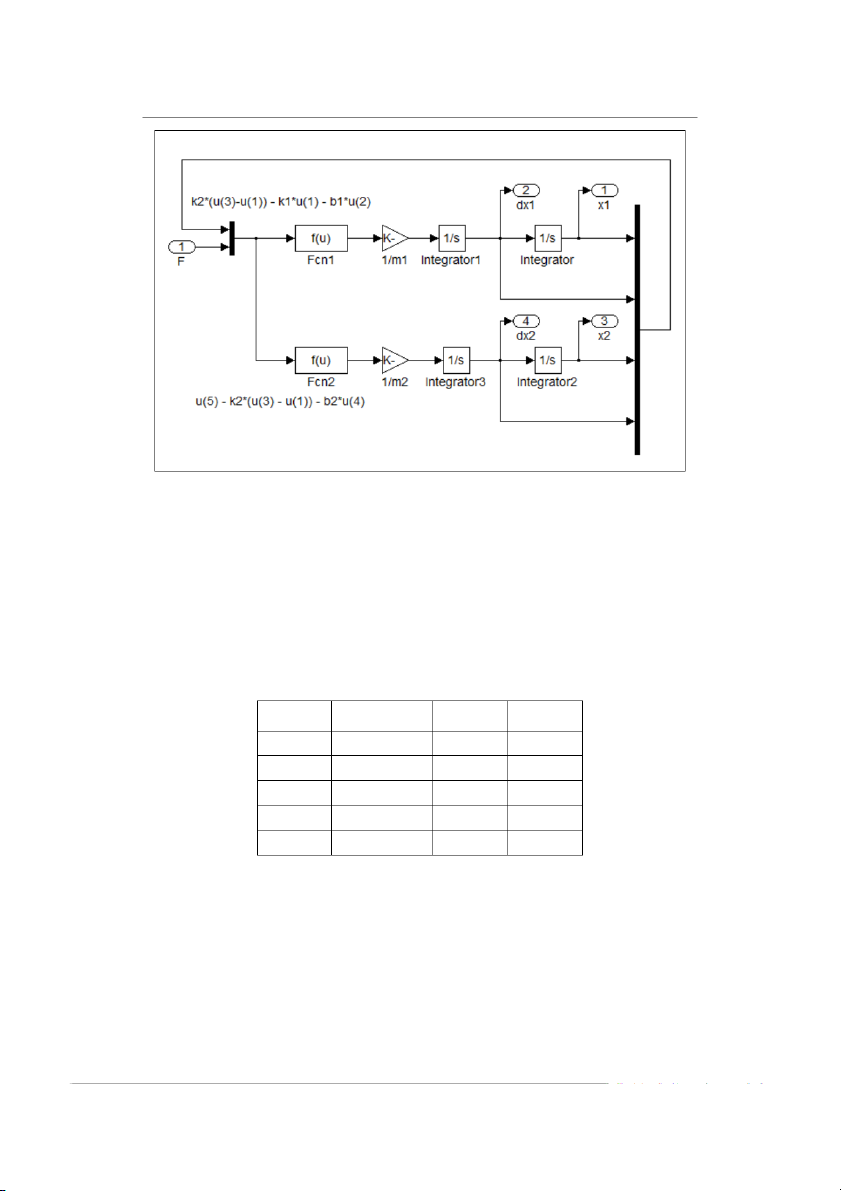
Xây dng mô hnh Simulink đ kho st đp ứng ng ra ca h xe – l xo như
Hnh 6. Trong đ, khi “Mass-Spring Damper” chứa mô hnh h xe – l xo được
xây dng từ phương trnh vi phân (1) v mô t như Hnh 7 vi bng thông s: Thông s m1 m2 k1 k2 b1 b2 Gi tr 1.3 0.7 1000 1000 10 5
Hnh 6. Mô hnh kho sát á
đ p ng ng ra ca hệ xe – l xo 7/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
Hnh 7. Mô hnh hệ xe – l xo
a) To file mô hnh simulink như Hnh 6. b) Ci đt g i tr Force = 10 (N). c) Chy mô phỏng.
d) M scope đ xem đp ứng, xc đnh khong cch di chuyn ca xe 1, xe 2 v
ghi li các kt qu vào Bng 1.
e) Lp li bưc b) đn d) vi các gi tr Force cn còn li như trong Bng 1. Vẽ đ t
h biu din x1 theo Force v x2 theo Force. Nhận xt kt qu đ th.
Bng 1. Khong cách di chuyn theo lc tác động Ln chy Force (N)
x (mm) x (mm) 1 2 1 10 10 20 2 20 3 30 4 40 5 50
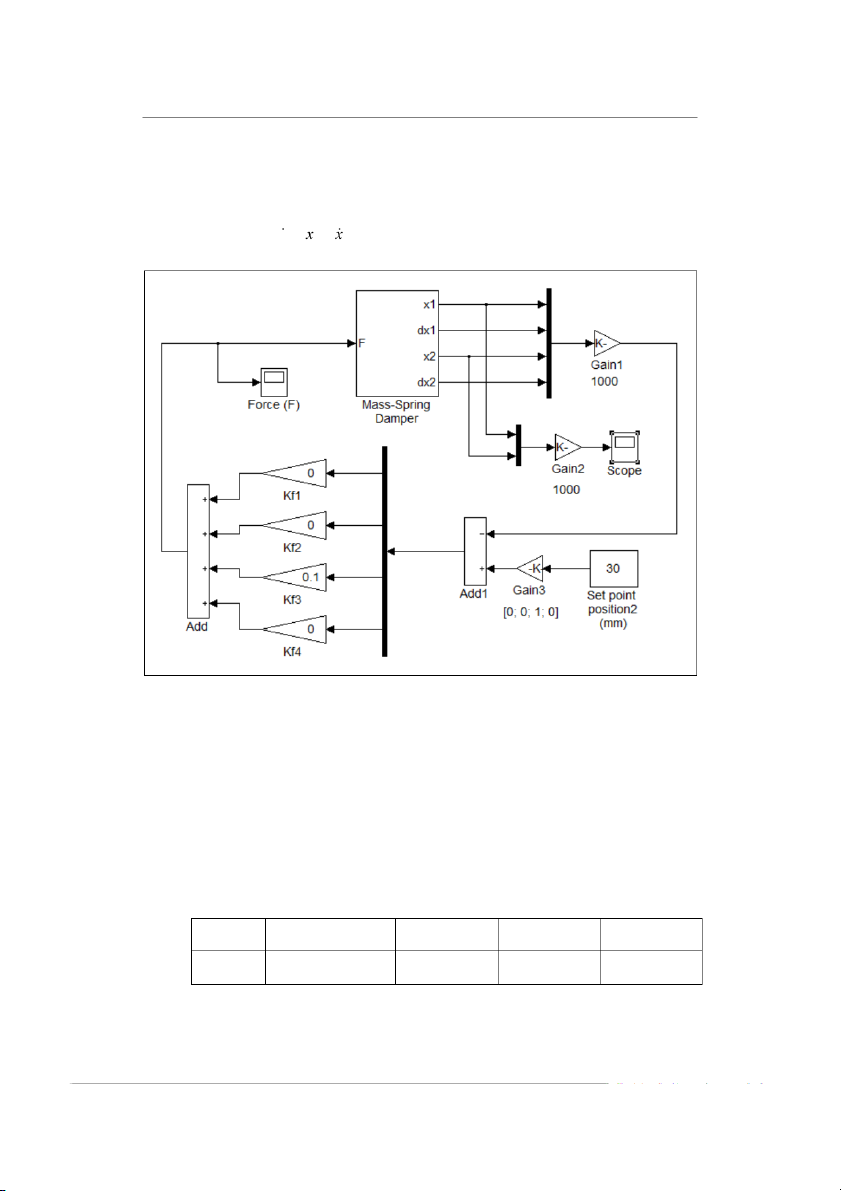
4.2. Điu khin hi tip bin trng thi hệ xe – l xo
Xây dng b điu khin hi tip bin trng thi đ điu khin v tr ca xe 2
như Hnh 8. Trong đ:
• Khi “Gain1” v “Gain2” c gi tr bng 1000 đ chuyn từ đơn v meter sang milimeter. 8/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
• Khi “Gain3” c gi tr bng 0; 0; 1; 0 đ la chn tn hiu đt l v tr x . 2
(Nu tn hiu đt l l v tr x th “Gain3” c gi tr bng 1; 0; 0; 0). 1
• H s hi tip K K K K K f f 1 f 2 f 3 f 4
tương ứng cho 4 tn hiu trng T
thi x x x . 1 1 2 2
Hnh 8. Sơ đ điu khin hi tip bin trng thái
a) To file mô hnh simulink như Hnh 8.
b) K 0 0 0.1 0 . Ci đt gi tr đt cho xe 2 l 30mm. f c) Chy mô phỏng.
d) M scope đ xem đp ứng, xc đnh đ vt l, thi gian qu đ và sai s xác lập ca v tr xe 2.
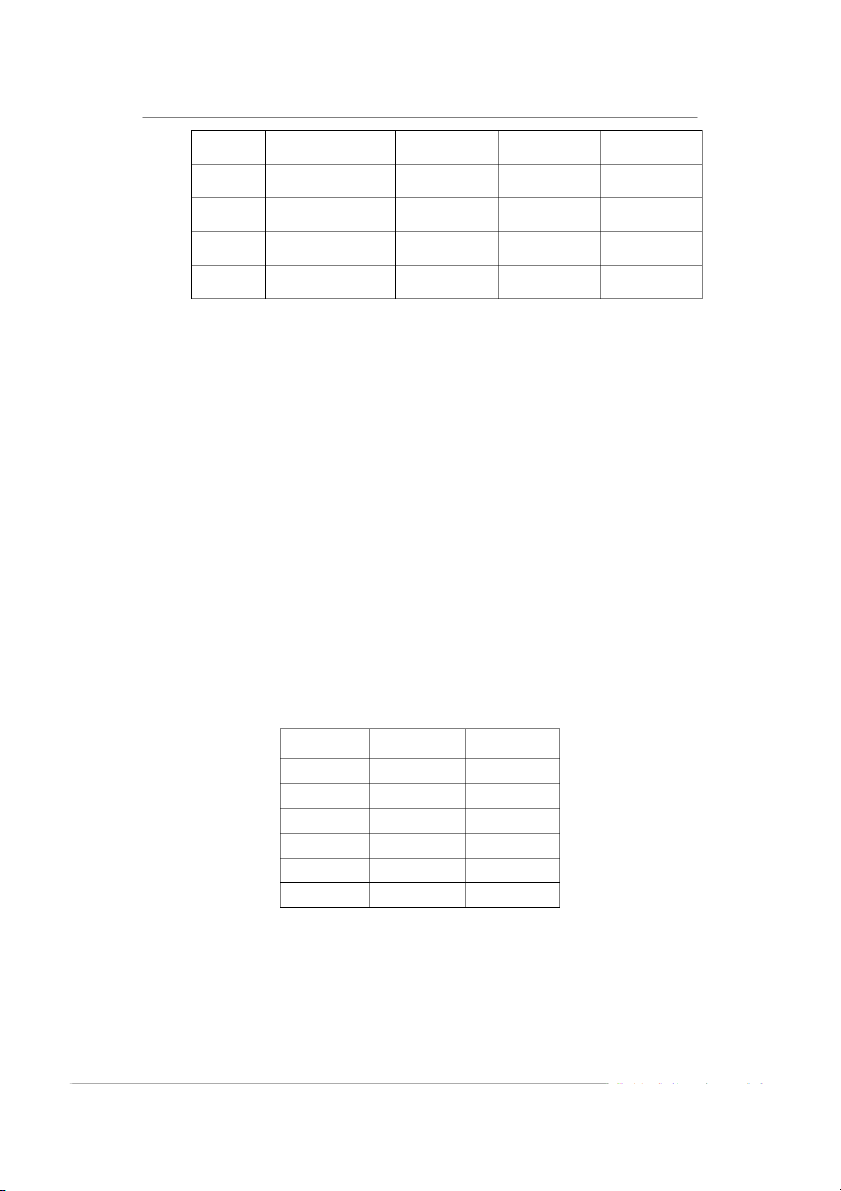
e) Lp li bưc b) đn d) vi các gi tr K cn còn li như trong Bng 2. Nhận f
xt kt qu mô phỏng khi tăng h s hi tip K . f
Bng 2. Bng giá t r K f Ln chy K Đ f vt l Sai s x c lập T/g xc lập 1 0 0 0.1 0 9/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM 2 0 0 1 0 3 0 0 10 0 4 0 0 10 0. 1 5 0 0 10 0.3 6 0 0 10 0.5
V. THC HIN TH NGHIM
5.1. Tm thông s ca hệ xe –l xo
Trong phn ny, sinh viên sẽ thu thập tn hiu đu vo v đu ra ca h thng v
p dng công thức Mc 2.2 đ tm cc thông s chưa bit ca h xe – l xo: đ cứng
k1, k2 ca l xo; h s ma st b
1, b2 ca xe; v h s t l K .
5.1.1. Tm k1 , b1
Các bước thí nghiệm:
a) M file recti_ident.m v chy đ khi to cc thông s stop-time v step-size
cho phn mô phỏng. Sinh viên không cn ci đt li phn thit lập trong Simulink- Configuration.
Lưu : Khi chy file ny ln đu tiên chương trnh s báo li nhưng vn khi
to đưc giá tr bnh thưng.
b) Biên dch v chy file recti_response.mdl đ thu thập s liu (xem hưng dn Mc 3.2)
c) Chy li file recti_ident.m đ tm thông s k1, b1.
d) Lp li bưc b) v c) vi 5 ln chy v ghi kt qu vo Bng 3. Sau đ, tnh gi
tr trung bnh ca thông s k1, b1.
Bng 3. Giá tr k , b 1 1 Ln chy k (N/m) b (N.s/m) 1 1 1 2 3 4 5 Trung bnh 10/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
5.1.2. Tm K , b2
Các bước thí nghiệm:
a) M file recti_ident.m v vit đon chương trnh đ tnh K, b2 theo (9) - (11) .
Hưng dn: Sinh viên tham kho đon chương trnh tnh k , b theo (6) - (8) 1 1
v da vo đ đ vit thêm vo phn dưi như sau: % Tim thong so cua he thong: % Do cung k cua lo xo: k1_hat
% He so ma sat tren m1: b1_hat
a1 = T*T*(2*x1(2:N-1) - x2(2:N-1));
a2 = T*(x1(2:N-1) - x1(1:N-2)); PHI = [a1 a2];
lamda = (2*x1(2:N-1) - x1(1:N-2) - x1(3:N))*m1;
theta = inv(PHI'*PHI)*PHI'*lamda; k1_hat = theta(1) b1_hat = theta(2)
% Sinh vien tham khao doan code o tren
% de tim thong so cua he thong:
% He so khuech dai U = K.F: K_hat
% He so ma sat tren m2: b2_hat a1 = ... a2 = ... PHI = ... lamda = ...
theta = inv(PHI'*PHI)*PHI'*lamda; K_hat = theta(1) b2_hat = theta(2)
b) Biên dch v chy file recti_response.mdl đ thu thập s liu.
c) Chy li file recti_ident.m sau khi đ vit chương trnh đ tm thông s K, b2.
e) Lp li bưc b) v c) vi 5 ln chy v ghi kt qu vo Bng 4. Sau đ, tnh gi
tr trung bnh ca thông s K, b2.
Bng 4. Giá t r K , b 2 Ln chy K b (N.s/m) 2 1 2 3 4 5 Trung bnh 11/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
5.2. Điu khin v tr xe 2
Các bước thí nghiệm:
a) M file recti_feedback_ctrl2.mdl.
b) K 0 0 0.1 0 . Ci đt gi tr đt cho xe 2 l 30mm. f
c) Biên dch v chy chương trnh (xem hưng dn Mc 2.3).
d) M scope đ xem đp ứng, xc đnh đ vt l, thi gian qu đ và sai s xác
lập ca v tr xe 2. Chú ý: Phi m Scope trưc khi chy mô hnh hoc chy
xong mi đưc m Scope, nu không máy tnh s b treo.
e) Lp li bưc b) đn d) vi các gi tr K cn còn li như trong Bng 5. Nhận f
xt nh hưng ca từng h s K v K
lên cht lượng h thng. f 3 f 4
Bng 5. Bng giá t r K f Ln chy K Đ f vt l Sai s x c lập T/g xc lập 1 0 0 0.1 0 2 0 0 0.5 0 3 0 0 1 0 4 0 0 5 0 5 0 0 10 0 6 0 0 10 0.02 7 0 0 10 0.05 8 0 0 10 0. 1 9 0 0 10 0.2
5.3. Điu khin v tr xe 1
Các bước thí nghiệm:
a) M file recti_feedback_ctrl1.mdl. b) K 0.2 0 0 0 Ci đ f .
t gi tr đt cho xe 1 l 15mm .
c) Biên dch v chy chương trnh
d) M scope đ xem đp ứng, xc đnh đ vt l, thi gian qu đ và sai s xác
lập ca v tr xe 2. Chú ý: Phi m Scope trưc khi chy mô hnh hoc chy
xong mi đưc m Scope, nu không máy tnh s b treo.
e) Lp li bưc b) đn d) vi các gi tr K cn còn li như trong Bng 6. Nhận f
xt nh hưng ca từng h s K , K v K
lên cht lượng h thng. f 1 f 2 f 4 12/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
Bng 6. Bng giá t r K f Ln chy K Đ f vt l Sai s x c lập T/g xc lập 1 0.2 0 0 0 2 0.5 0 0 0 3 1 0 0 0 4 1.5 0 0 0 5 2 0 0 0 6 1 0.001 0 0 7 1 0.002 0 0 8 1 0.005 0 0 9 1 0.008 0 0 10 1 0.01 0 0 11 1 0 0 0.0 1 12 1 0 0 0.0 2 13 1 0 0 0.0 5 14 1 0 0 0. 1 15 1 0 0 0. 2 13/14
Bộ môn Điu khin T động – Khoa Điện-Điện tử - ĐH Bách Khoa TPHCM
Báo cáo thí nghiệm
H và tên: Nhóm: Ngày:
1. Từ bng s liu Bng 3 v Bng 4, vit phương trnh bin trng thi h xe – l xo theo (3)?
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
2. Da vo kt qu th nghim Mc 5.2, nhận xt nh hưng ca từng h s K , f 3 K
lên cht lượng h thng? f 4
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
3. Da vo kt qu th nghim Mc 5.3, nhận xt nh hưng ca từng h s K , f 1 K v K
lên cht lượng h thng? f 2 f 4
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
...............................................................................................................................................
............................................................................................................................................... 14/14
Tài liệu liên quan:
-

Báo cáo thực tập - Bài thực tập số 1: Linh kiện điện tử cơ bản | Môn Hệ thống điện – Điện tử ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
602 301 -

Toyota Lexus Rx450h Hybrid 2018 | Báo cáo môn hệ thống điện điện tử ôto | Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
276 138 -

Electromagnetic interference | Báo cáo môn: Hệ thống điện – điện tử ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
258 129 -

Hướng dẫn sử dụng mô hình điện thân xe Lexus | Đồ án môn Hệ thống điện – điện tử ô tô Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
322 161 -

Hệ thống chiếu sáng – kỹ thuật viên chuẩn đoán | Tài liệu môn Hệ thống Điện – điện tử ôto Trường đại học sư phạm kỹ thuật TP. Hồ Chí Minh
214 107