Báo cáo cuối kỳ Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Khởi động tuần tự: Mạch cần khởi động và điều khiển hai động cơ một cách tuần tự,với động cơ thứ nhất hoạt động trước, hoạt động trong một khoảng thời gian nhất định, sau đó dừng lại trước khi động cơ 2 được kích hoạt và thực hiện quy trình tương tự. Tài liệu được sưu tầm gồm 15 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Điều khiển hệ thống điện công nghiệp (APM436564)L 10 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:






Preview text:
lOMoAR cPSD| 58702377
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP. HỒ CHÍ MINH
KHOA: ĐIỆN-ĐIỆN TỬ
BỘ MÔN ĐIỆN CÔNG NGHIỆP ----- -----
BÁO CÁO CUỐI KỲ HỆ THỐNG ĐIỀU KHIỂN ĐIỆN CÔNG NGHIỆP
GVHD: TS. Trần Quang Thọ Nhóm 3 TP.Hồ Chí Minh, 02/2025 lOMoAR cPSD| 58702377 Giới thiệu
Lớp sáng thứ 7, tiết 1-4
Chuyên ngành: CNKT ĐIỆN – ĐIỆN TỬ
Nội dung: BÀI BÁO CÁO HỆ THỐNG ĐIỀU KHIỂN ĐIỆN CÔNG NGHIỆP
GV hướng dẫn và đánh giá: TRẦN QUANG THỌ
NHẬN XÉT CỦA GIẢNG VIÊN
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
.....................................................................................................................................
..................................................................................................................................... lOMoAR cPSD| 58702377 MỤC LỤC
LIỆT KÊ HÌNH................................................................................................................6
LỜI MỞ ĐẦU...................................................................................................................8
CHƯƠNG I: KHỞI ĐỘNG HAI ĐỘNG CƠ TUẦN TỰ............................................10
1.1.Yêu cầu thiết kế......................................................................................................10
1.2.Thiết kế mạch động lực..........................................................................................10
1.3.Thiết kế sơ đồ nối dây và mô tả các phần tử trong mạch......................................11
1.3.1.Sơ đồ nối dây....................................................................................................11
1.3.2. Bảng mô tả các phần tử trong mạch..............................................................11
1.4.Nguyên lý điều khiển.............................................................................................13
1.4.1.Thiết kế lưu đồ điều khiển...............................................................................13
1.4.2.Giải thích nguyên lý hoạt động.......................................................................14
1.5.Xây dựng mô hình mô phỏng................................................................................14
1.5.1.Thiết kế giao diện (CX-Supervisor hoặc CX-Designer)..................................14
1.5.2.Sơ đồ ladder (CX-Programmer)......................................................................17
1.6.Kết quả và nhận xét...............................................................................................18 lOMoAR cPSD| 58702377
LIỆT KÊ HÌNH
Hình 1.1. Sơ đồ mạch động lực mạch hai động cơ khởi động tuần tự…...….……..………8
Hình 1.2. Sơ đồ nối dây…………………………………………….……………..…….………..9
Hình 1.3. Lưu đồ Điều khiển………………………………………………......…….…..........11
Hình 1.4. Tạo các địa chỉ cho CX-Supervisor……………………………...….….…………12
Hình 1.5. Giao diện trang chủ HOME………………………………………….…….…...…13
Hình 1.6. Giao diện điều khiển khởi động tuần tự 2 động cơ……………………..………13
Hình 1.7. Đèn 1 sáng và timer bắt đầu đếm ngược…………….…………….…….………14
Hình 1.8. Giao Diện CX-Programmer………………………..…………….….…….………15 lOMoAR cPSD| 58702377 LỜI MỞ ĐẦU
1.Tính cần thiết -
Trong bối cảnh đẩy mạnh công nghiệp hóa và hiện đại hóa đất nước, nhu cầu sử
dụng điện trong các ngành công nghiệp, nông nghiệp, dịch vụ và sinh hoạt đang không
ngừng gia tăng. Đặc biệt, lĩnh vực thương mại và dịch vụ ngày càng đóng vai trò quan
trọng trong nền kinh tế, trở thành một trong những khách hàng chính của ngành điện. Sự
phát triển nhanh chóng của các trung tâm thương mại, nhà hàng, khách sạn cao tầng cùng
với việc sử dụng các thiết bị hiện đại và cao cấp đã làm nổi bật tầm quan trọng của hệ
thống điện và hệ thống điều khiển tự động trong đời sống hiện đại. -
Để đáp ứng những yêu cầu ngày càng cao, việc nghiên cứu và phát triển các giải
pháp điều khiển và tự động hóa đang trở thành yếu tố then chốt nhằm nâng cao tính ổn
định, đảm bảo an toàn và giảm thiểu rủi ro. Trong kỷ nguyên cách mạng công nghiệp 4.0,
sự phát triển mạnh mẽ của công nghệ kỹ thuật số, kết hợp với Internet vạn vật (IoT), khả
năng truy cập dữ liệu thời gian thực và sự ra đời của các hệ thống vật lý không gian mạng
đã mang đến những bước tiến vượt bậc. Nhờ đó, các hệ thống điều khiển và tự động ngày
nay đang được tích hợp nhiều công nghệ tiên tiến nhằm tối ưu hóa hiệu quả vận hành.
2.Mục tiêu của đề tài
- Hiểu rõ nguyên lý hoạt động và thiết kế các mạch điều khiển hệ thống điều khiển
tuần tự hai động cơ; mạch điều khiển hệ thống thang cuốn trong các trung tâm thương
mại, tòa nhà cao tầng có thể hoạt động trong giờ hành chính, có cảm biến tự động hoạt
động khi có người tiến lại gần; thiết kế hệ thống ATS có chức năng tự động chuyển mạch
khi nguồn gặp sự cố, và tự động trở lại bình thường khi đã được khắc phục sự cố.
3.Đối tượng và phạm vi nghiên cứu -
Đối tượng nghiên cứu: dựa vào việc phân tích khả năng làm việc tự động, báo cáo
tập trung nghiên cứu: hệ thống tuần tự hai động cơ, hệ thống thang cuốn và hệ thống Automatic Tranfer Switch. -
Phạm vi nghiên cứu: hiểu được các cấu trúc, phân tích sơ đồ và nguyên lý hoạt
động của từng hệ thống điều khiển, từ đó biết được cách vận hành để điều khiển chúng
đơn giản. Sau đó, thực hiện mô phỏng và kiểm tra hoạt động của chúng, từ đó rút ra kết
quả và đánh giá để có phương pháp tốt nhất đảm bảo các hệ thống điều khiển hoạt động
một cách an toàn và hiệu quả. lOMoAR cPSD| 58702377
4.Cách tiếp cận và phương pháp nghiên cứu
Cách tiếp cận: Báo cáo được xây dựng dựa trên việc phân tích ưu và nhược điểm của
các nghiên cứu đã được công bố trên các tạp chí khoa học uy tín. Từ đó, làm cơ sở để
đánh giá hoạt động, đề xuất các giải pháp tối ưu và khám phá ứng dụng thực tiễn của
các hệ thống điều khiển. Phương pháp nghiên cứu:
- Phương pháp phân tích: Tiến hành thu thập và phân tích thông tin từ các nguồn tài
liệu như giáo trình, bài báo khoa học để nắm vững nguyên lý hoạt động của các hệ
thống điều khiển. Qua đó, hình thành cái nhìn tổng quan, trực quan và xác định
hướng nghiên cứu phù hợp.
- Phương pháp mô phỏng: Sử dụng các phần mềm chuyên dụng như
CXProgrammer, CX-Supervisor,… để mô phỏng và kiểm tra hoạt động của các hệ
thống thông qua các mạch điều khiển, từ đó đánh giá hiệu quả và độ tin cậy của
các giải pháp đề xuất. lOMoAR cPSD| 58702377
CHƯƠNG I: KHỞI ĐỘNG HAI ĐỘNG CƠ TUẦN TỰ
1.1.Yêu cầu thiết kế -
Khởi động tuần tự: Mạch cần khởi động và điều khiển hai động cơ một cách tuần
tự,với động cơ thứ nhất hoạt động trước, hoạt động trong một khoảng thời gian nhất định,
sau đó dừng lại trước khi động cơ 2 được kích hoạt và thực hiện quy trình tương tự. -
Điều khiển tốc độ và hướng: Mạch có khả năng điều khiển tốc độ và hướng đi của mỗi động cơ. -
Kiểm soát thời gian chạy:Có thể thiết lập thời gian chạy sao cho phù hợp với yêu cầu ứng dụng. -
Bảo vệ và xử lý lỗi: Mạch bao gồm các tính năng bảo vệ và khả năng xử lý lỗi an
toàn, đảm bảo độ tinh cậy và ổn định trong quá trình hoạt động.
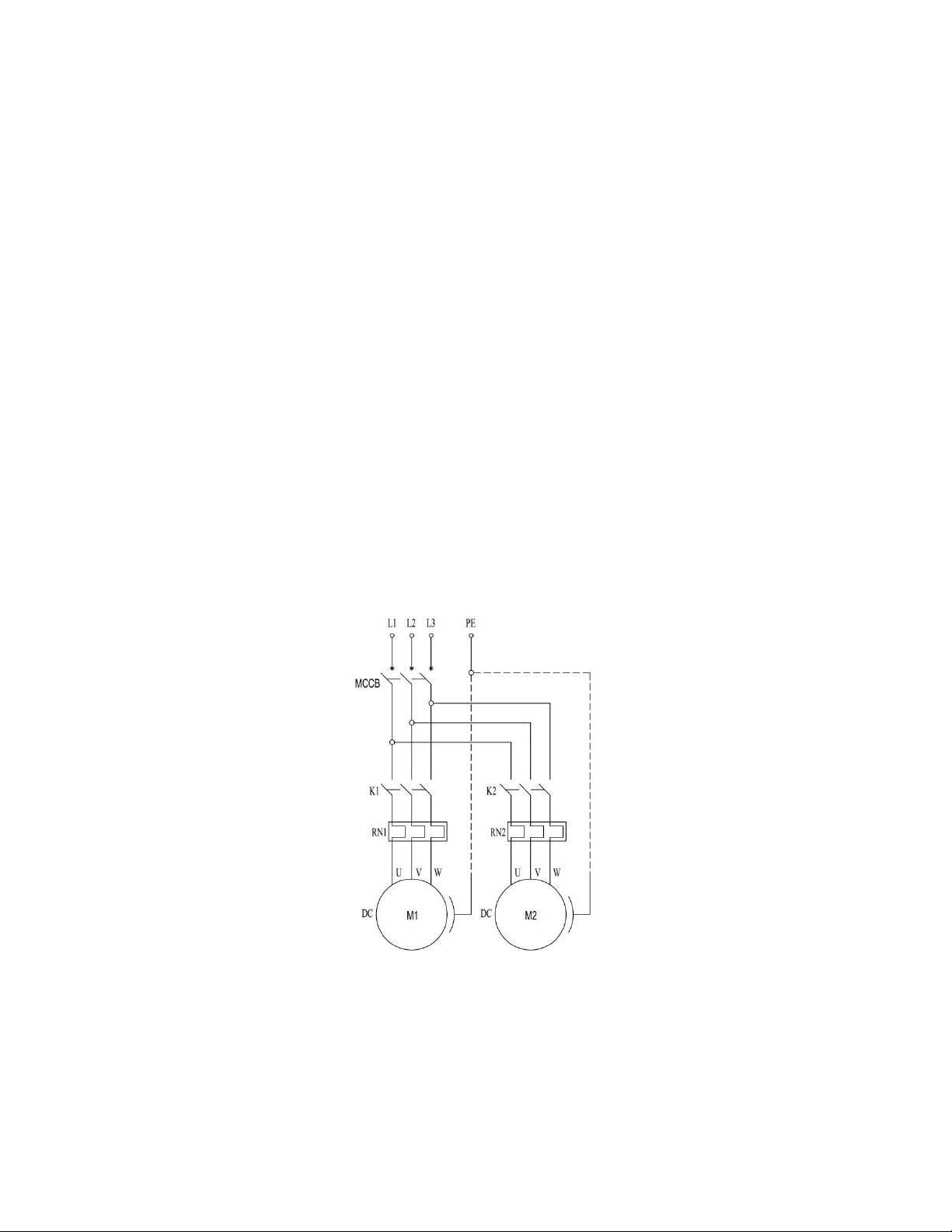
1.2.Thiết kế mạch động lực
- Mạch động lực bao gồm: 1 MCCB 3 pha, 2 contactor là K1và K2, 2 Relay nhiệt
(RN) , và 2 động cơ 3 pha được đấu dây như hình.
Hình 1.1. Sơ đồ mạch động lực mạch hai động cơ khởi động tuần tự lOMoAR cPSD| 58702377
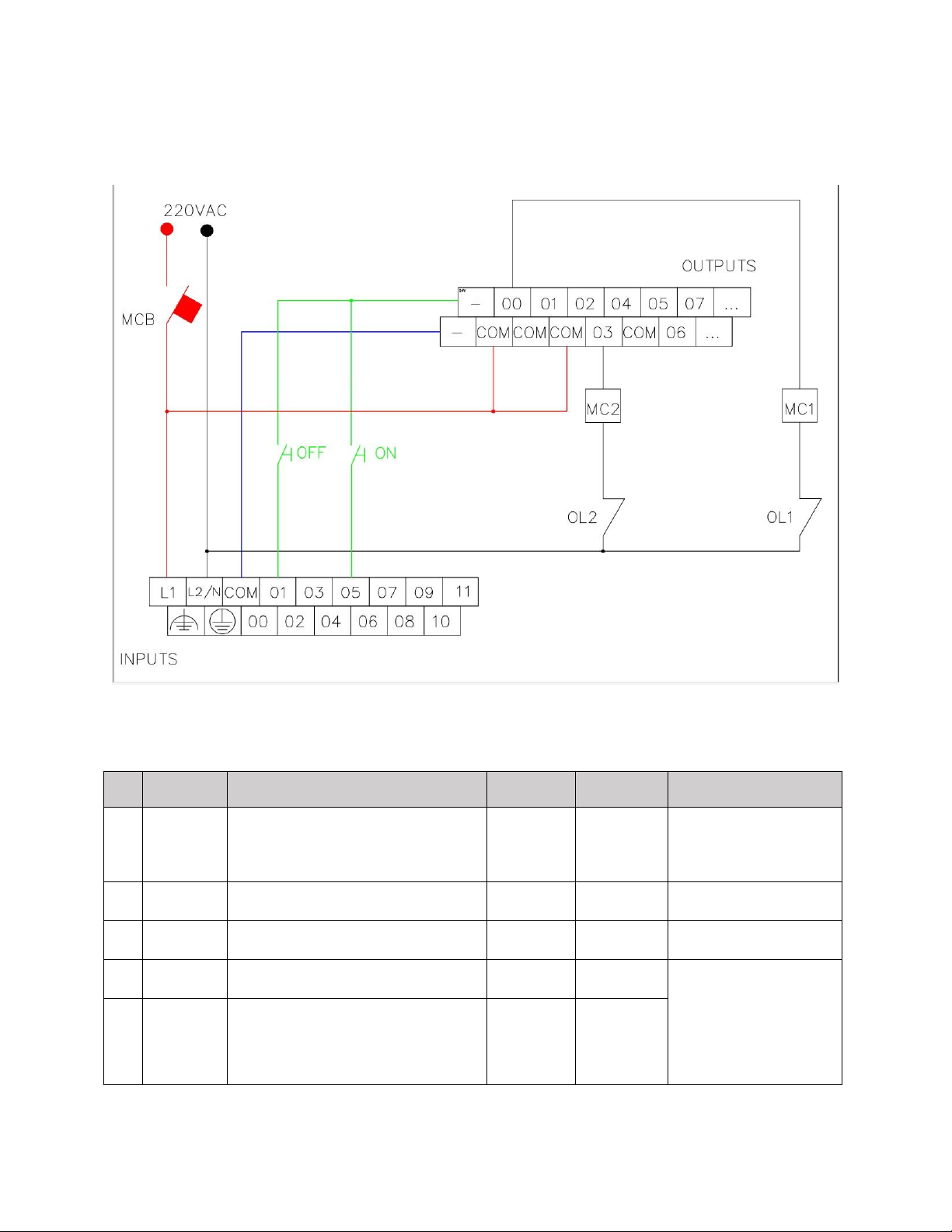
1.3.Thiết kế sơ đồ nối dây và mô tả các phần tử trong mạch
1.3.1.Sơ đồ nối dây
Hình 1.2. Sơ đồ nối dây
1.3.2. Bảng mô tả các phần tử trong mạch # Symbol Description Address Value Note 1 MCCB Moulded case circruit breaker 2 K1 Contactor 1 Motor 1 3 K2 Contactor 2 Motor 2 4 RN1 Thermal Relay 1 Long-term overload 5 RN2 Thermal Relay 2 protection lOMoAR cPSD| 58702377 6 Q1 Coil for MC1 100.00 Output point 7 Q2 Coil for MC2 100.03 8 OFF OFF button 0.01 Input point 9 ON On button 0.05 10 T2 Timer T2 D2 Delay 11 D0 Set timer value D0 2-30 Seconds 12 D4 Displayed timer value D4 T2 T2/10 lOMoAR cPSD| 58702377
1.4.Nguyên lý điều khiển
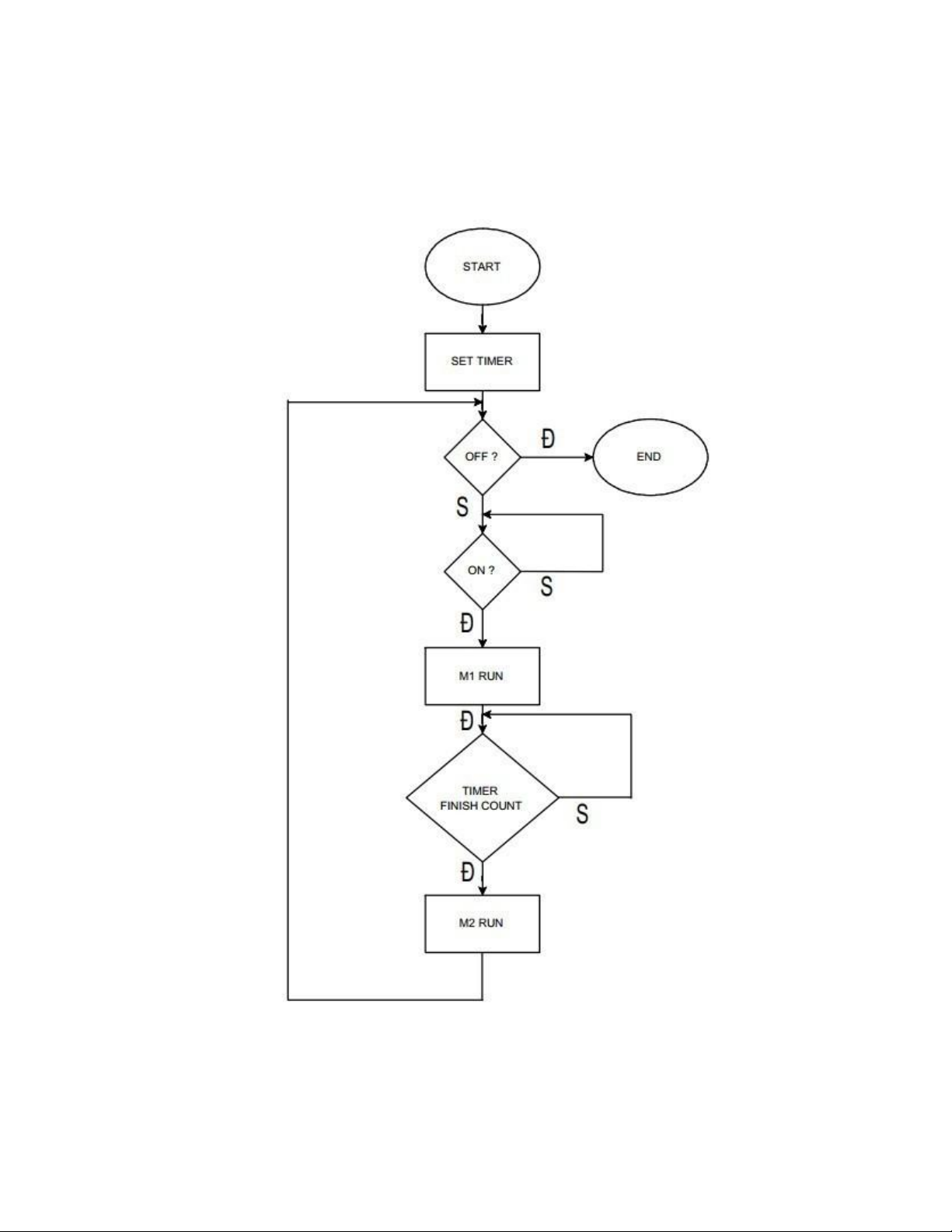
1.4.1.Thiết kế lưu đồ điều khiển
Hình 1.3. Lưu đồ Điều khiển lOMoAR cPSD| 58702377
1.4.2.Giải thích nguyên lý hoạt động
- Sau khi đã thiết lập được thời gian cho Timer ta ấn nút ON thì động cơ M1 chạy và
đợi Timer đếm xong. Sau khi Timer đếm xong thì động cơ M2 chạy. Ấn nút STOP sẽ
dừng chương trình điều khiển.
1.5.Xây dựng mô hình mô phỏng
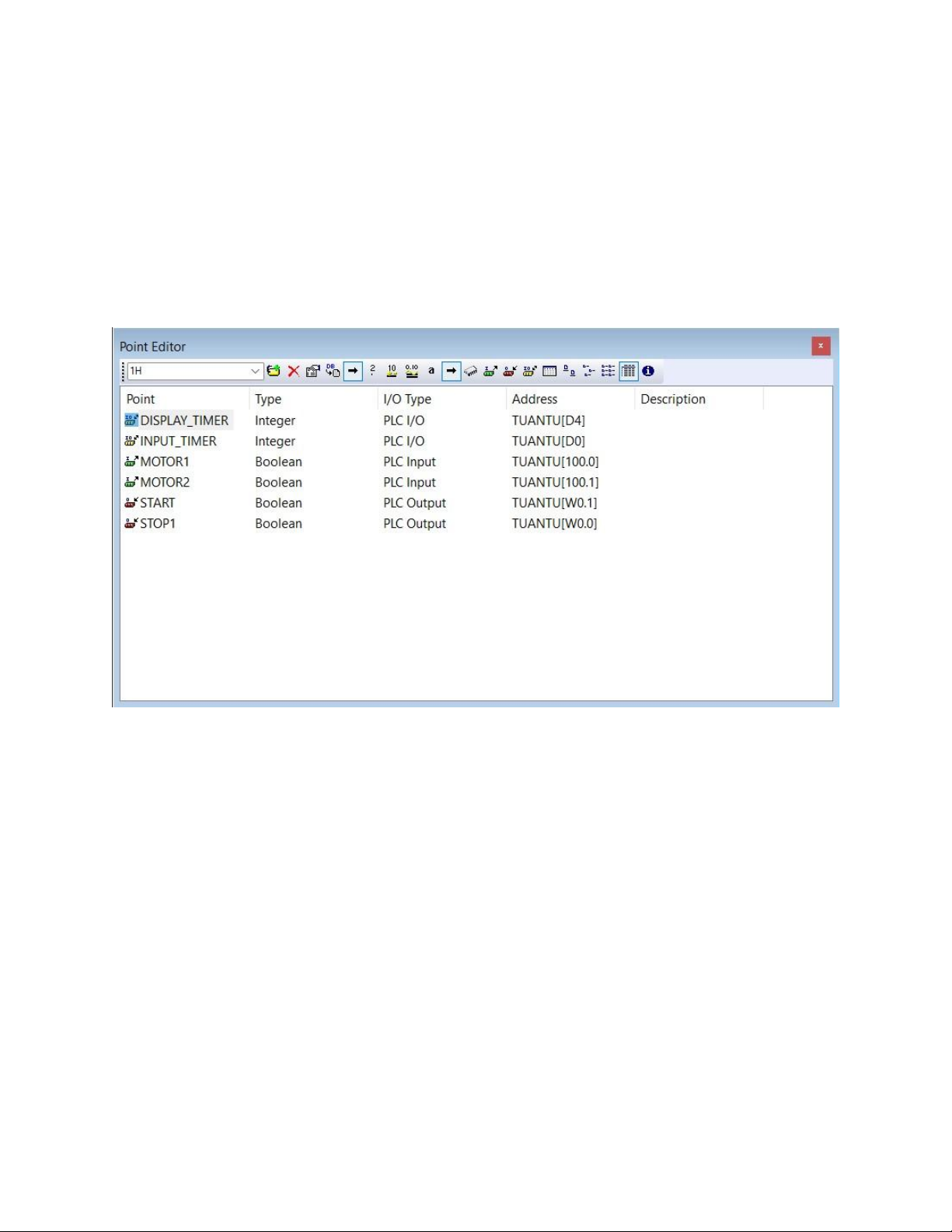
1.5.1.Thiết kế giao diện (CX-Supervisor hoặc CX-Designer)
Hình 1.4. Tạo các địa chỉ cho CX-Supervisor lOMoAR cPSD| 58702377
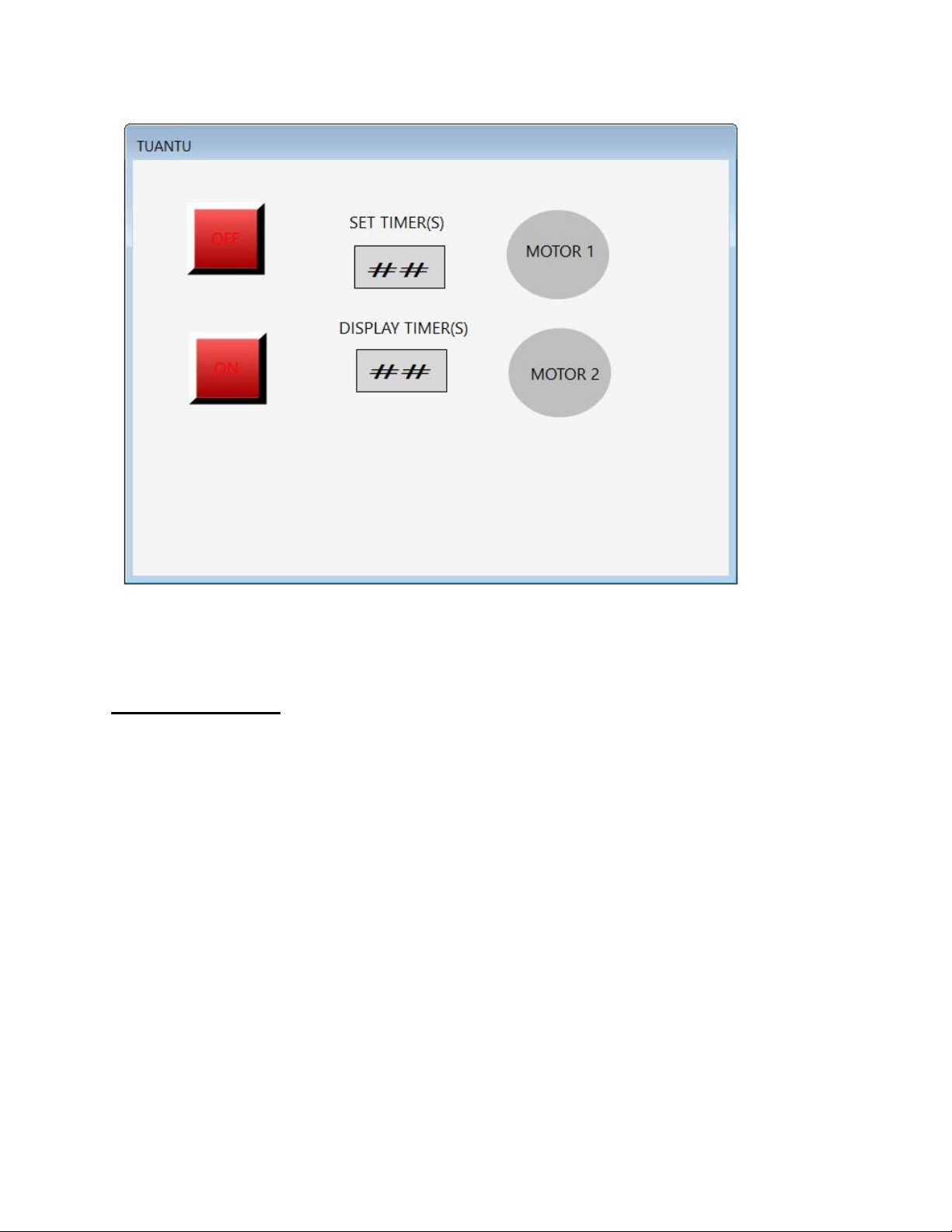
Hình 1.5 Giao diện điều khiển khởi động tuần tự 2 động cơ
Giải thích nguyên lý:
- Sau khi cài đặt thời gian delay cho Timer ở chỗ SET TIMER, sau đó ta ấn vào nút
ON trên màn hình hiển thị, ngay lập tức coil 1 sẽ được tác động hút và cấp điện cho động
cơ 1 bắt đầu quay, đèn báo hiệu số 1 sáng. Cùng lúc đó Timer bắt đầu đếm ngược. Sau
khi hoàn tất quá trình đếm ngược, động cơ số 2 bắt đầu được cấp điện đèn báo hiệu số 2
sáng nhờ coil 2 hút. Ấn nút STOP để tắt cả hai động cơ. lOMoAR cPSD| 58702377
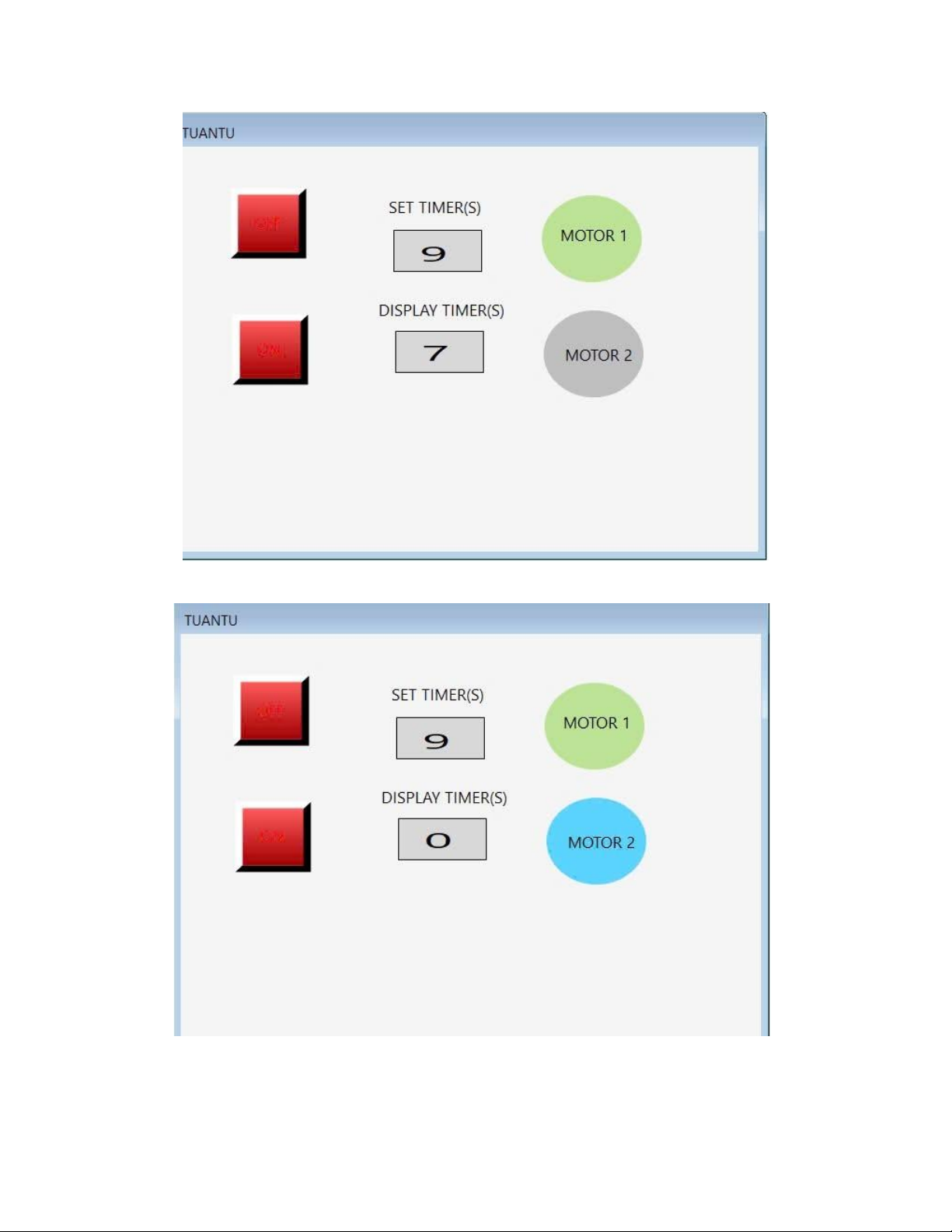
Hình 1.6. Đèn 1 sáng và timer bắt đầu đếm ngược
Hình 1.7. Đèn 2 sáng và timer bắt đầu đếm ngược lOMoAR cPSD| 58702377
1.5.2.Sơ đồ ladder (CX-Programmer)
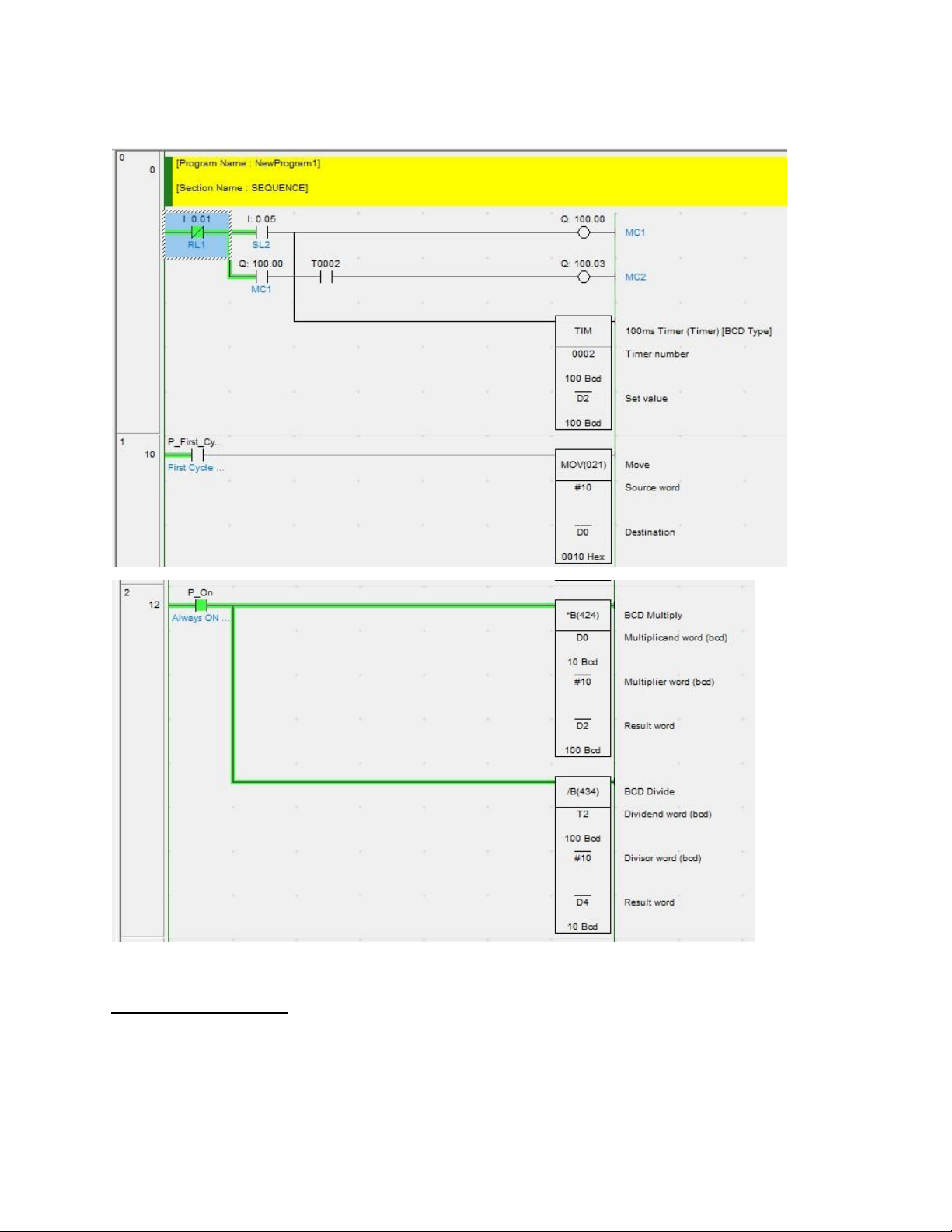
Hình 1.8. Giao Diện CX-Programmer
Giải thích nguyên lý:
- Sau khi cấp điện, ta set thời gian cho timer sẽ được lưu vào D0, thời gian của timer
đếm sẽ được lấy từ D0 và đếm vào D2 rồi từ giá trị của D2 lấy chia 10 sẽ được giá trị hiển
thị trên màn hình. Cấp điện ấn nút Run sẽ cấp điện cho cuộn Q1 (100.00) hút tiếp điểm duy lOMoAR cPSD| 58702377
trì và timer bắt đầu đếm, sau khi hoàn tất đếm ngược tiếp điểm của timer hút cấp điện cho
cuộn Q2 (100.03) hút khởi động động cơ 2.
1.6.Kết quả và nhận xét
- Kết quả: Mạch hoạt động tốt và đúng như yêu cầu.
- Nhận xét: Mạch điều khiển các động cơ theo một chu trình tuần tự đã được cài đặt
trước. Động cơ 1 sẽ được kích hoạt trước, hoạt động trong một khoảng thời gian nhất
định, sau đó dừng lại trước khi động cơ 2 được kích hoạt để thực hiện quy trình tương tự.
Tài liệu liên quan:
-

Đáp án Trắc Nghiệm | Môn Điều khiển hệ thống điện công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
200 100 -

Trắc nghiệm Hệ Thống Điện và Máy Biến Áp | Môn Điều khiển hệ thống điện công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
127 64 -

Báo cáo Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
237 119 -

Trắc Nghiệm Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
229 115