Trắc Nghiệm Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Trắc Nghiệm Môn Điều khiển hệ thống điện công nghiệp. Tài liệu được sưu tầm gồm 53 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Điều khiển hệ thống điện công nghiệp (APM436564)L 10 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:

Preview text:
lOMoAR cPSD| 58702377
MộtTRẮC NGHIỆM 1: KHÁI NIỆM ĐIỀU KHIỂN TỰ ĐỘNG
1. Ý nào SAI khi nói về điều khiển kinh điển?
A. Lý thuyết điều khiển kinh điển chủ yếu áp dụng cho hệ tuyến tính bất biến theo thời gian.
B. Lý thuyết điều khiển kinh điển mô tả hệ thống trong miền tần số và mặt phẳng s.
C. Lý thuyết điều khiển kinh điển có thể mở rộng để áp dụng cho hệ phi tuyến
D. Lý thuyết điều khiển kinh điển không thể áp dụng cho các hệ thống biến đổi theo thời gian.
2. Một hệ thống được gọi là tuyến tính nếu?
A. Tín hiệu chuẩn r(t) và tín hiệu ra c(t) tỉ lệ với nhau theo công thức c(t)=K.r(t) với K là hằng số.
B. Tín hiệu vào và tín hiệu ra quan hệ theo hàm bậc nhất.
C. Tín hiệu điều khiển u(t) và tín hiệu ra c(t) tỉ lệ với nhau theo công thức c(t)=K.u(t) với K là hằng số.
D. Tín hiệu điều khiển và tín hiệu ra quan hệ theo hàm bậc nhất.
3. Sự khác nhau giữa hệ thống bất biến và hệ thống biến đổi theo thời gian là gì?
A. Hàm truyền của hệ thống biến đổi theo thời gian có chứa các yếu tố tác động từ bên ngoài còn hệ
thống bất biến là một hệ kín lý tưởng.
B. Hàm truyền của hệ thống biến đổi có chứa nhiễu bên ngoài còn hệ thống bất biến không có nhiễu.
C. Các thông số của đối tượng có thể thay đổi trong hệ thống biến đổi theo thời gian còn hệ thống
bất biến thì không thay đổi.
D. Tín hiệu điều khiển không thay đổi theo thời gian trong hệ thống bất biến còn tín hiệu điều khiển
trong hệ thống biến đổi theo thời gian có thể thay đổi theo thời gian
4. Tín hiệu dòng điện có thể đo bằng bộ cảm biến dòng điện dựa trên nguyên tắc nào
A. Đo trực tiếp điện áp trên điện trở có dòng điện cần đo chạy qua
B. Đo gián tiếp bằng cảm biến halt
C. Đo gián tiếp bằng biến dòng điện dựa trên nguyên lý cảm ứng điện từ
D. Tất cả các phương án đều đúng
5. Đối với các hệ thống phức tạp ta phải
A. Chia nhỏ hệ thống điều khiển thành các hệ thống độc lập và điều khiển từng hệ thống này.
B. Loại bỏ thông số để đơn giản hóa các biến điều khiển. Đưa hệ thống về hệ thống đơn giản hơn.
C. Tăng số lượng biến điều khiển, sử dụng các hệ thống điều khiển mạnh mẽ phức tạp để giải quyết
được bài toán điều khiển đưa ra.
D. Chia nhỏ hệ thống điều khiển thành các hệ thống điều khiển và kết hợp hoạt động với hệ thống điều khiển trung tâm
6. Ý nào SAI khi nói về điều khiển thông minh?
A. Có thể kết hợp bộ điều khiển thông thường với các kỹ thuật điều khiển thông minh tạo nên các bộ
điều khiển lai có chất lượng rất tốt.
B. Tự xây dựng mô hình toán của đối tượng điều khiển.
C. Khuyết điểm của điều khiển thông minh là quá trình thiết kế mang tính thử sai, dựa vào kinh nghiệm của chuyên gia.
D. Các phương pháp điều khiển thông minh như điều khiển mờ, mạng thần kinh nhân tạo, thuật toán
di truyền mô phỏng/bắt chước các hệ thống.
7. Một hệ thống điều khiển tự động bao gồm bao nhiêu khối chức năng cơ bản?
A. Không xác định, tùy thuộc vào độ phức tạp của hệ thống. B. 04 Khối chức năng C. 03 Khối chức năng lOMoAR cPSD| 58702377 D. 02 Khối chức năng
8. Nguyên tắc bổ sung ngoài được hiểu là:
A. Hệ thống phải có khả năng dự đoán được các thông số từ bên ngoài tác động đến hệ thống.
B. Hệ thống phải có thêm tùy chọn thêm thông số điều khiển.
C. Hệ thống yêu cầu phải điều khiển cả hệ thống với các thông số không chắc chắn và hay thay đổi.
D. Hệ thống yêu cầu phải điều khiển cả hệ thống và các thông số chưa biết từ bên ngoài.
9. Hệ thống được gọi là liên tục nếu?
A. Hệ thống được lấy mẫu liên tục theo thời gian.
B. Hệ thống được điều khiển liên tục theo thời gian.
C. Hệ thống có tín hiệu điều khiển và tín hiệu ngõ ra làm hàm liên tục theo thời gian
D. Hệ thống có tín hiệu ở bất kỳ phần nào của hệ cũng là hàm liên tục theo thời gian.
10. Sai số đưa vào bộ điều khiển là hiệu của các tín hiệu
A. Tín hiệu đầu ra và tín hiệu đầu vào của đối tượng được điều khiển
B. Tín hiệu đầu ra của đối tượng được điều khiển và tín hiệu tham chiếu
C. Tín hiệu tham chiếu (tín hiệu mong muốn) và tín hiệu đầu ra của khối phản hồi (cảm biến)
D. Tín hiệu vào và ra của bộ điều khiển
TRẮC NGHIỆM PHẦN BĂNG TẢI CÁC LOẠI
1. Chế độ làm việc của các thiết bị vận tải liên tục (băng tải các loại)
A. Chế độ dài hạn với công suất vận hành hầu như không đổi và không yêu cầu điều chỉnh tốc độ.
B. Chế độ không điều chỉnh tốc độ và duy trì lực căng của băng tải
C. Chế độ dài hạn với moment tải hầu như không đổi
D. Chế độ dài hạn với phụ tải hầu như không đổi
2. Công suất động cơ di chuyển vật thể dạng tĩnh cần phải lớn hơn những thành phần công suất nào A. Công suất P = P1+P2+P3
B. Công suất di chuyển vật thể (P1) và Công suất nâng vật thể (P3) tương đương P=P1+P3
C. Công suất khắc phục tổn thất do ma sát ổ đỡ, băng tải và con lăn khi không tải vật thể (P2) D. Công suất P = P1+P2
3. Băng tải dùng để
A. Vận chuyển hành khách và chở hàng ở những địa hình phức tạp, núi non hiểm trở.
B. Vận chuyển hành khách trong các cửa hàng siêu thị, các tòa thị chính, nơi có lưu lượng hành khách
C. Vận chuyển vật liệu dạng hạt và có kích thước nhỏ
D. Vận tải vật thể dạng hạt theo phương thẳng đứng. Bộ phận bốc hàng là những gầu nhỏ.
4. Moment khởi động Mkđ của động cơ có tỷ lệ như thế nào với moment định mức của động cơ? Mđm? A. Mkđ = Mđm B. Mkđ = (2 - 4)Mđm C. Mkđ = (1,6 - 1,8)Mđm lOMoAR cPSD| 58702377 D. Mkđ = (2 - 3)Mđm
5. Thang chuyển (thang cuốn) dùng để
A. Vận tải vật thể dạng hạt theo phương thẳng đứng. Bộ phận bốc hàng là những gầu nhỏ.
B. Vận chuyển vật liệu dạng hạt và có kích thước nhỏ
C. Vận chuyển hành khách và chở hàng ở những địa hình phức tạp, núi non hiểm trở.
D. Vận chuyển hành khách trong các cửa hàng siêu thị, các tòa thị chính, nơi có lưu lượng hành
khách lớn và trong các nhà ga tàu điện ngầm
6. Đường goòng treo dùng để
A. Vận chuyển vật liệu dạng hạt và có kích thước nhỏ
B. Vận tải vật thể dạng hạt theo phương thẳng đứng bằng những gầu nhỏ
C. Bộ phận bốc hàng là những gầu nhỏ. Vận chuyển hành khách và chở hàng ở những địa hình phức tạp, núi non hiểm trở
D. Vận tải các vật thành phẩm và bán thành phẩm trong các phân xưởng, nhà máy sản xuất theo dây chuyền sản xuất.
7. Tính chất của động cơ dùng cho băng tải
A. Công suất tiêu thụ của thiết bị vận tải liên tục thường ít thay đổi trong quá trình làm việc B. Tất cả đều đúng
C. Không cần thiết phải kiểm tra theo điều kiện phát nóng và quá tải.
D. Trong điều kiện làm việc nặng nề của thiết bị: kiểm tra theo điều kiện mở máy
8. Băng gầu dùng để
A. Vận chuyển hành khách trong các cửa hàng siêu thị, các tòa thị chính, nơi có lưu lượng hành
khách lớn và trong các nhà ga tàu điện ngầm
B. Vận chuyển vật liệu dạng hạt và có kích thước nhỏ
C. Vận chuyển hành khách và chở hàng ở những địa hình phức tạp, núi non hiểm trở.
D. Vận tải vật thể dạng hạt theo phương thẳng đứng. Bộ phận bốc hàng là những gầu nhỏ.
9. Băng chuyền dùng để
A. Vận tải các vật thành phẩm và bán thành phẩm trong các phân xưởng, nhà máy sản xuất theo dây chuyền sản xuất.
B. Vận tải vật thể dạng hạt theo phương thẳng đứng.
C. Bộ phận bốc hàng là những gầu nhỏ. Vận chuyển hành khách và chở hàng ở những địa hình phức tạp, núi non hiểm trở
D. Vận chuyển vật liệu dạng hạt và có kích thước nhỏ
10. Hệ truyền động các thiết bị liên tục cần
A. Moment tải thay đổi nhiều và vận tốc làm việc ít thay đổi
B. Đảm bảo khởi động đầy tải, vận tốc làm việc ít thay đổi và an toàn
C. Đảm bảo dừng, an toàn và khởi động lại nhiều lần
D. Vận tốc có khả năng thay đổi trong phạm vi rộng, moment thay đổi ít và an toàn
TRẮC NGHIỆM PHẦN THANG MÁY lOMoAR cPSD| 58702377
Ý nghĩa toán học của độ giật của thang máy chở người là:
Đạo hàm bậc 1 với gia tốc và không liên quan đến vận tốc buồng thang
Đạo hàm bậc 2 với gia tốc và không liên quan đến vận tốc buồng thang
Đạo hàm bậc 1 với gia tốc và bậc 2 vận tốc buồng thang
Đạo hàm bậc 2 với gia tốc và bậc 1 vận tốc buồng thang
Lý do phải đặt contac hành trình phía trước vị trí dừng thang máy là
Để biết được thang đã đến tầng nào đó
Để cho mạch điều khiển và hệ thống hãm làm việc hợp lý và an toàn
Để buồng thang dừng đúng tầng mong muốn Tất cả đều đúng
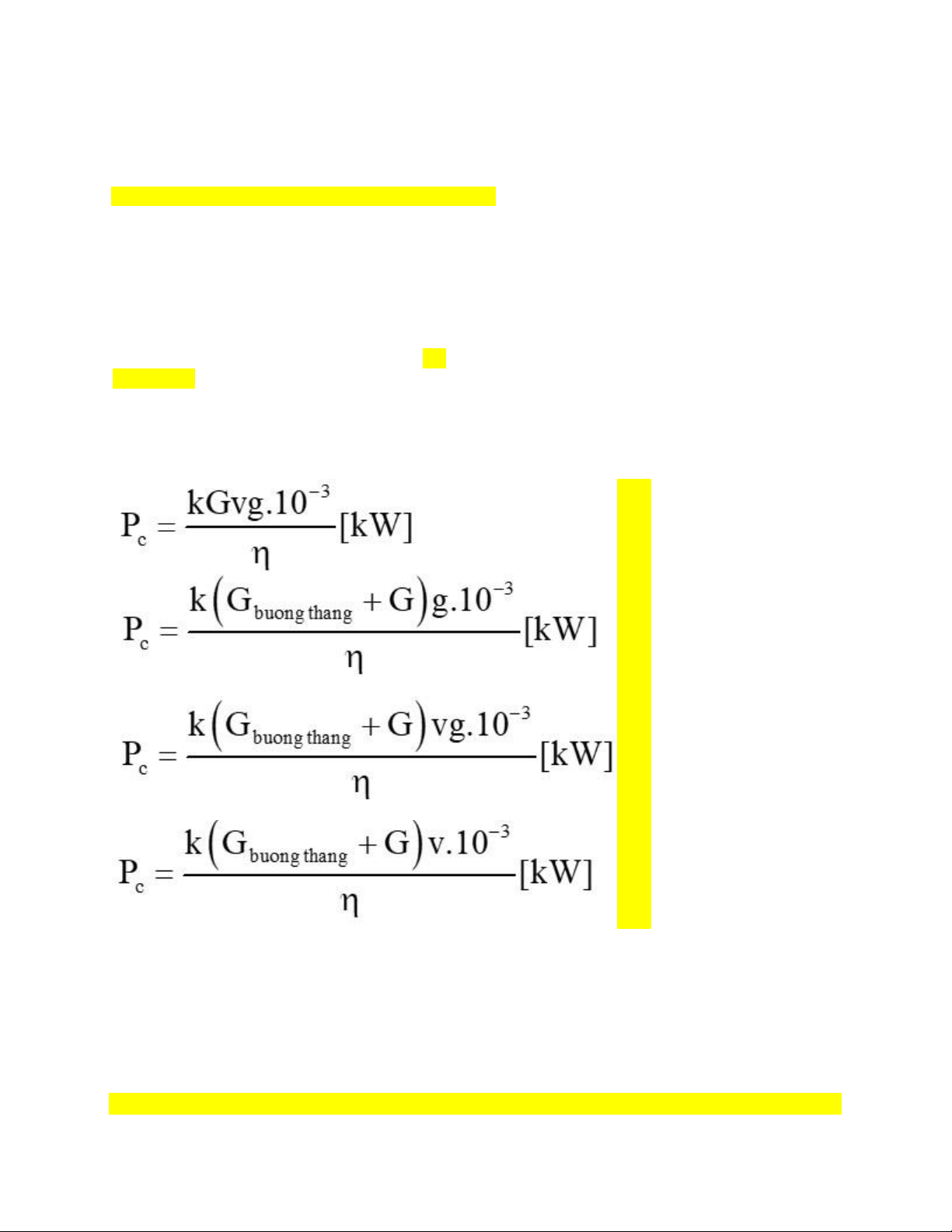
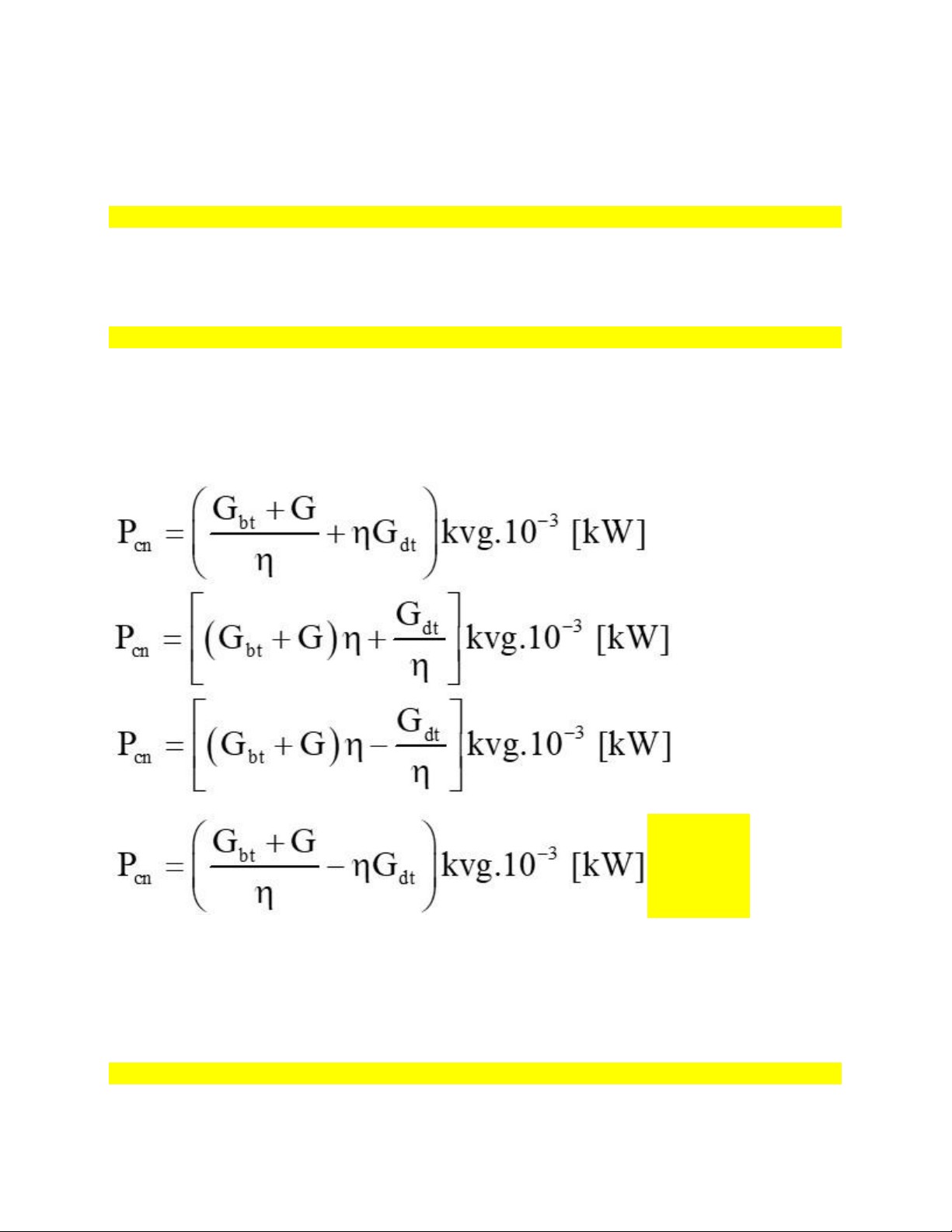
Công suất động cơ nâng thang máy trong hệ thống thang máy không có đối trọng với khối lượng buồng
thang, lượng hàng cần nâng sẽ công thức là vvvv
Thang máy (máy nâng) là thiết bị vận tải dùng để chở hàng và người theo phương hợp với mặt đất một góc là 60o Tất cả đều đúng 30o 90o lOMoAR cPSD| 58702377
Gia tốc thang máy chở người không vượt quá 20m/s2 3.5m/s2 1m/s2 2m/s2
Độ giật của thang máy chở người không vượt quá 20m 20m/s3 20m/s2 20m/s
Công suất tĩnh của động cơ nâng thang máy trong hệ thống thang máy có đối trọng Gdt với khối lượng
buồng thang, lượng hàng cần nâng khi nâng hàng sẽ công thức là vvv đáp án ddungs
Khối lượng đối trọng Gdt trong hệ thống thang máy thường phụ thuộc vào khối lượng buồng thang Gbt,
khối lượng cần nâng G là Gdt = (0.3-0.6)Gbt + G Gdt = Gbt + (0.7-1.2)G Gdt = Gbt + (0.3-0.6)G Gdt = (0.7-1.2)Gbt + G lOMoAR cPSD| 58702377
Thang máy chở người có hệ thống bảo vệ an toàn chống rơi tự do là Bộ điều tốc Dây cáp nâng buồng thang
Phanh điện từ tại đầu trục động cơ
Không có phương án nào đúng
Khoảng cách đặt contac hành trình trước vị trí dừng thang máy một đoạn S được tính từ
Khoảng chuyển động của buồng thang từ khi tiếp điểm hành trình phát hiện đến thời gian điều khiển tác động hãm (S2)
Khoảng cách chuyển động của buồng thang từ khi tiếp điểm hành trình phát hiện đến thời gian mạch điều khiển làm việc (S1)
Tổng của khoảng chuyển động của buồng thang từ khi tiếp điểm hành trình phát hiện, truyền tín hiệu và
khoảng cách cần để tốc độ buồng thang về không (S3) S = S1+S2+S3 lOMoAR cPSD| 58702377
TRẮC NGHIỆM PHẦN MÁY KÉO SỢI THÔ
1. Yêu cầu độ căng của sợi trong quá trình quấn ống và các lớp sợi phải đều nhau nên tốc độ
của ống sợi phải
A. Giảm dần theo sự tăng thời gian của ống sợi sao cho lực căng của sợi luôn không đổi
B. Tăng dần theo sự tăng đường kính của ống sợi sao cho lực căng của sợi luôn không đổi
C. Giảm dần theo sự tăng đường kính của ống sợi sao cho tốc độ ra của sợi luôn không đổi
D. Luôn không đổi để cho tốc độ ra của sợi luôn không đổi
2. Động cơ dùng cho máy kéo sợi thô là loại
A. Động cơ AC không đồng bộ 3 pha vì đặc tuyến vận hành của máy giống đặc tuyến của động cơ
và sử dụng phải đơn giản, vận hành tin cậy, có độ bền cao
B. Động cơ AC không đồng bộ 3 pha vì sử dụng phải đơn giản, vận hành tin cậy, có độ bền cao
C. Động cơ DC không chổi than vì có đặc tuyến cứng sử dụng phải đơn giản, vận hành tin cậy, có độ bền cao
D. Động cơ DC không chổi than vì sử dụng phải đơn giản, vận hành tin cậy, có độ bền cao
3. Bằng cách nào người công nhân có thể phát hiện ống sợi nào bị dứt
A. Sử dụng relay quang giám sát vị trí sự căng của sợi khi cuốn vào ống sợi và báo vị trí ống có sợi bị đứt B. Tất cả đều đúng
C. Kiểm tra lực căng của sợi bằng cảm biến lực, tín hiệu từ cảm biến lực giảm sẽ báo vị trí ống có sợi bị đứt
D. Kiểm tra bằng camera vị trí của sợi đang được cuốn vào ống sợi.
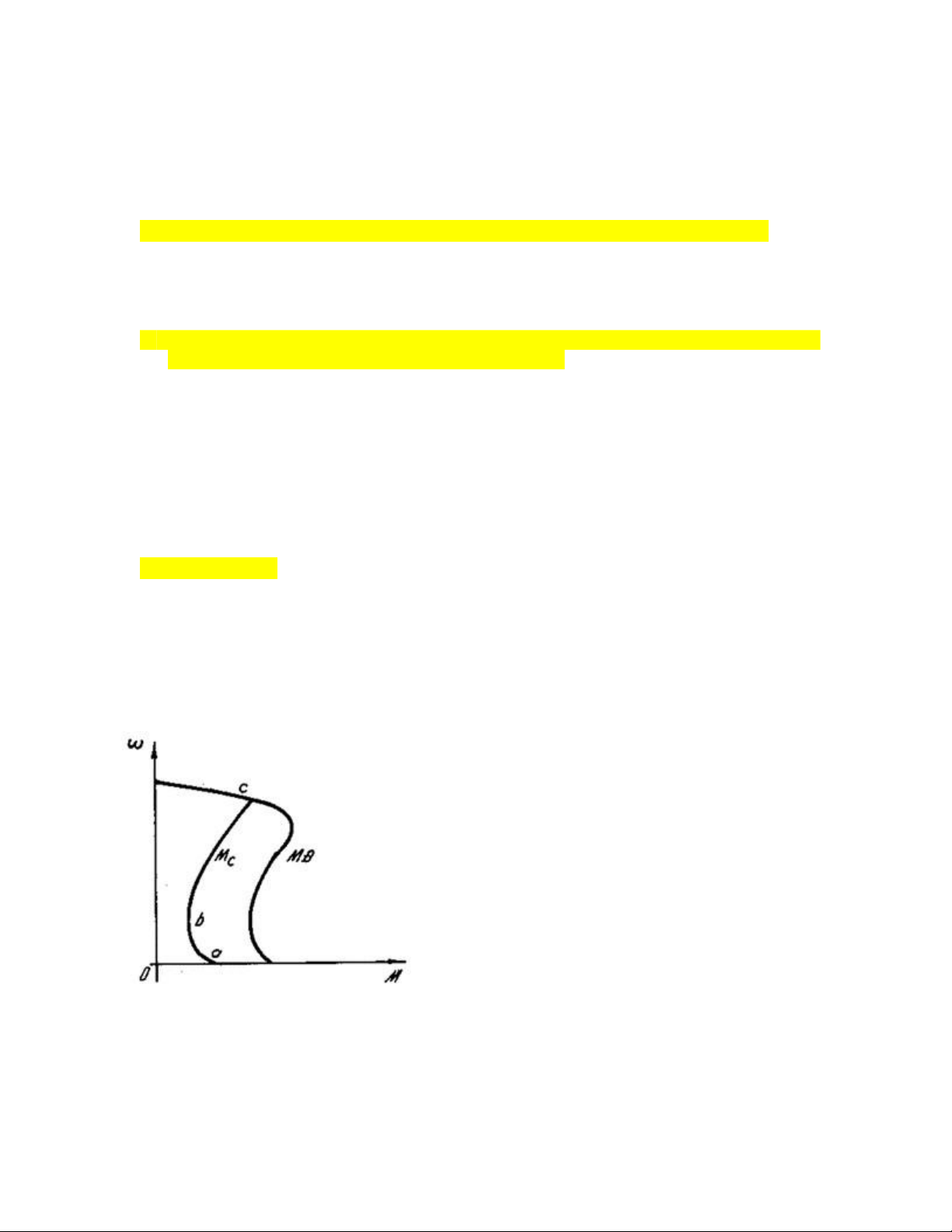
4. Hình bên dưới trình bày moment của quá trình làm việc của động cơ máy kéo sợi thô. Giai
đoạn từ a đến b và c, moment cản của Mc > Ma > Mb vì
A. Ma sát của máy với các ổ trục tại A bé hơn điểm B nhưng lực ma sát của sợi với không khí giảm
đáng kể tại B khi tốc độ quay của gàng tại A lớn hơn B nhiểu. Tại điểm C có lực ma sát với ổ trục tăng nhanh lOMoAR cPSD| 58702377
B. Ma sát của máy với các ổ trục tại A bằng với điểm B nhưng lực ma sát của sợi với không khí
giảm. Tại điểm C có lực ma sát với ổ trục tăng nhanh
C. Ma sát tại điểm làm việc A của máy với các ổ trục lớn khi bắt đầu khởi động, ma sát của máy ổ
trục giảm và lực ma sát của sợi với không khí còn khá thấp khi làm việc tại B, khi đến điểm C, ma sát không khí tăng
D. Ma sát của máy với các ổ trục tại A bằng với điểm B nhưng lực ma sát của sợi với không khí
giảm. Tại điểm C có lực ma sát với ổ trục và lực ma sát của sợi với không khí cùng tăng nhanh
5. Trong máy kéo sợi thô có rất nhiều nút khởi động và dừng là vì
A. Vì có nhiều ống sợi (máy có chiều dài lớn) và sự cố đứt sợi cao (phải dừng máy nhiều để nối) nên
phải nhiều nút khởi động tại nhiều vị trí dọc theo máy để công nhân thuận tiện khởi động lại hay dừng máy
B. Vì có nhiều cúi sợi thô nên phạm vi quan sát của công nhân phải lớn, vì vậy có nhiều nút khởi
động tại nhiều vị trí dọc theo máy để công nhân thuận tiện khởi động lại hay dừng máy
C. Vì có nhiều ống sợi (máy có chiều dài lớn) nên phải nhiều nút khởi động tại nhiều vị trí dọc theo
máy để công nhân thuận tiện khởi động và dừng máy
D. Vì sự cố đứt sợi cao (phải dừng máy nhiều để nối) nên phải nhiều nút khởi động tại nhiều vị trí
dọc theo máy để công nhân thuận tiện khởi động lại hay dừng máy
6. Để đảm bảo độ săn của sợi không đổi cần phải
A. Tốc độ quay của ống sợi không đổi
B. Moment cuốn của gàng luôn là hằng số, tốc độ sơi có thể thay đổi tùy thuộc vào độ kết dính của sợi
C. Tốc độ ra của sợi không đổi
D. Giữ tốc độ của gàng và tốc độ ra sợi là không đổi
7. Bộ phận chính thực hiện quá trình công nghệ kéo nhỏ cúi thành sợi thô:
A. Các bộ phận dẫn cúi hay sợi thô vào máy, Đầu khuôn rút, Bộ phận kéo dài, Cơ cấu xe, quấn ống
B. Các bộ phận dẫn cúi hay sợi thô vào máy và Cơ cấu xe, quấn ống.
C. Các bộ phận dẫn cúi hay sợi thô vào máy, Bộ phận kéo dài và Cơ cấu xe, quấn ống.
D. Các bộ phận dẫn cúi hay sợi thô vào máy, Bộ phận kéo dài, Cơ cấu xe, quấn ống và Gàng điều hướng
8. Yêu cầu cơ bản của truyền động máy sợi:
A. Khởi động nhanh và động cơ được sử dụng phải đơn giản, vận hành tin cậy, có độ bền cao
B. Khởi động êm và động cơ được sử dụng phải đơn giản, vận hành tin cậy, có độ bền cao
C. Số lần khởi động, dừng của máy sợi thô thường lớn nên động cơ được sử dụng phải đơn giản, vận
hành tin cậy, có độ bền cao
Khởi động phải theo chương trình với đặc tuyến động cơ cứng nhằm thắng được các lực ma sát không ổ trục và không khí
9. Máy kéo sợi thô được dùng trong các lĩnh vực
A. Kéo sợi kim loại làm giảm kích thước sợi kim loại
B. Kéo và bọc cách điện cho dây điện (dây một sợi hay dây nhiều sợi) C. Kéo sợi vải D. Tất cả đều đúng lOMoAR cPSD| 58702377
10. Trong quá trình sợi chuyển động quấn vào ống, động cơ máy kéo sợi thô khi khởi động phải
chịu bao nhiêu thành phần lực ma sát
A. Lực ma sát giữa sợi - trục quấn, lực ma sát trong máy, lực ma sát giữa các ô trục và lực ma sát giữa sợi – không khí
B. Lực ma sát giữa sợi - trục quấn
C. Lực ma sát giữa sợi - trục quấn và lực ma sát trong máy
D. Lực ma sát giữa sợi - trục quấn, lực ma sát trong máy và lực ma sát giữa sợi – không khí lOMoAR cPSD| 58702377
TRẮC NGHIỆM MÁY IN CUỘN
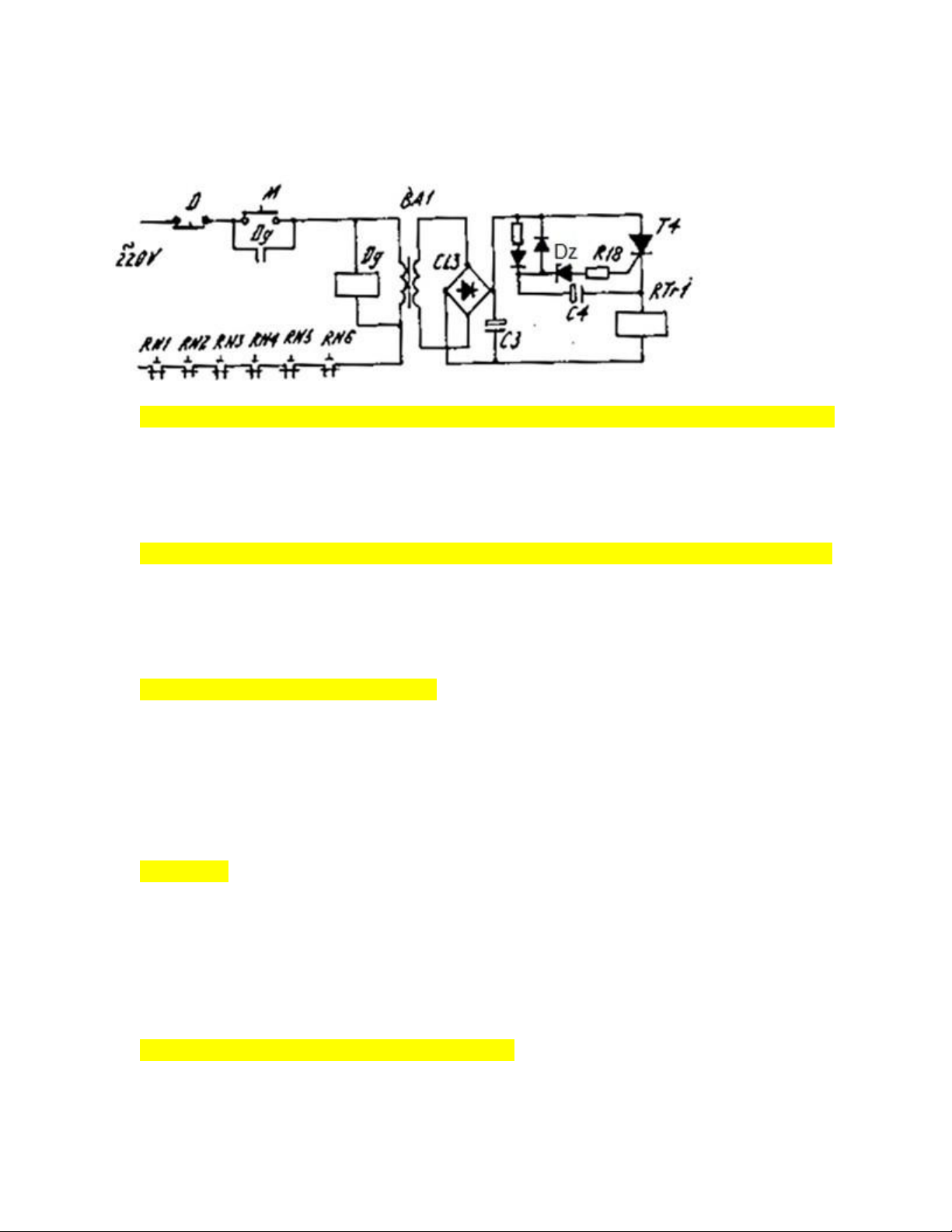
1. Mạch điện bên dưới là mạch khởi động của máy in vải Elitex như hình vẽ, khi nhấn nút M
thì cuộn dây nào sẽ có điện trước
A. Cuộn Dg có trước cuộn RTr1 vì điện áp kích T4 phải qua mạch thời hằng RC4 và diode zener Dz
B. Cuộn Dg có sau cuộn RTr1 vì điện áp kích T4 qua mạch RC4 làm tăng tốc
C. Cả hai cuộn Dg và RTr1 đều có điện đồng thời
D. Cuộn Dg có trước cuộn RTr1 vì điện áp kích T4 phải qua mạch thời hằng RC4
2. Hệ thống in vải cần có khả năng dừng máy
A. Dừng máy nhanh. Nếu không hãm dừng nhanh có thể gây ra phế phẩm vải nhiều, giảm năng suất
B. Dừng máy chậm và đồng bộ để tránh đứt vải
C. Dừng máy chậm và bắt buộc theo chu trình dừng máy
D. Dừng máy chậm. Nếu hãm dừng quá nhanh có thể gây ra phế phẩm vải nhiều, giảm năng suất
3. Độ căng của cuộn vải đến trục in được điều khiển bằng
A. Cách ổn định tốc độ động cơ kéo vải in
B. Cách tăng giảm bán kính trục kéo
C. Cách ổn định lực kéo của động cơ kéo vải in
D. Cách tăng giảm tỷ số truyền cơ khí từ trục quay của động cơ đến trục quay của quả lô in
4. Khi tăng thêm màu in trên vải cần in thì công suất vận hành của động cơ kéo vải in sẽ A.
Tùy thuộc vào chất liệu vải B. Giảm xuống C. Tăng lên D. Không đổi
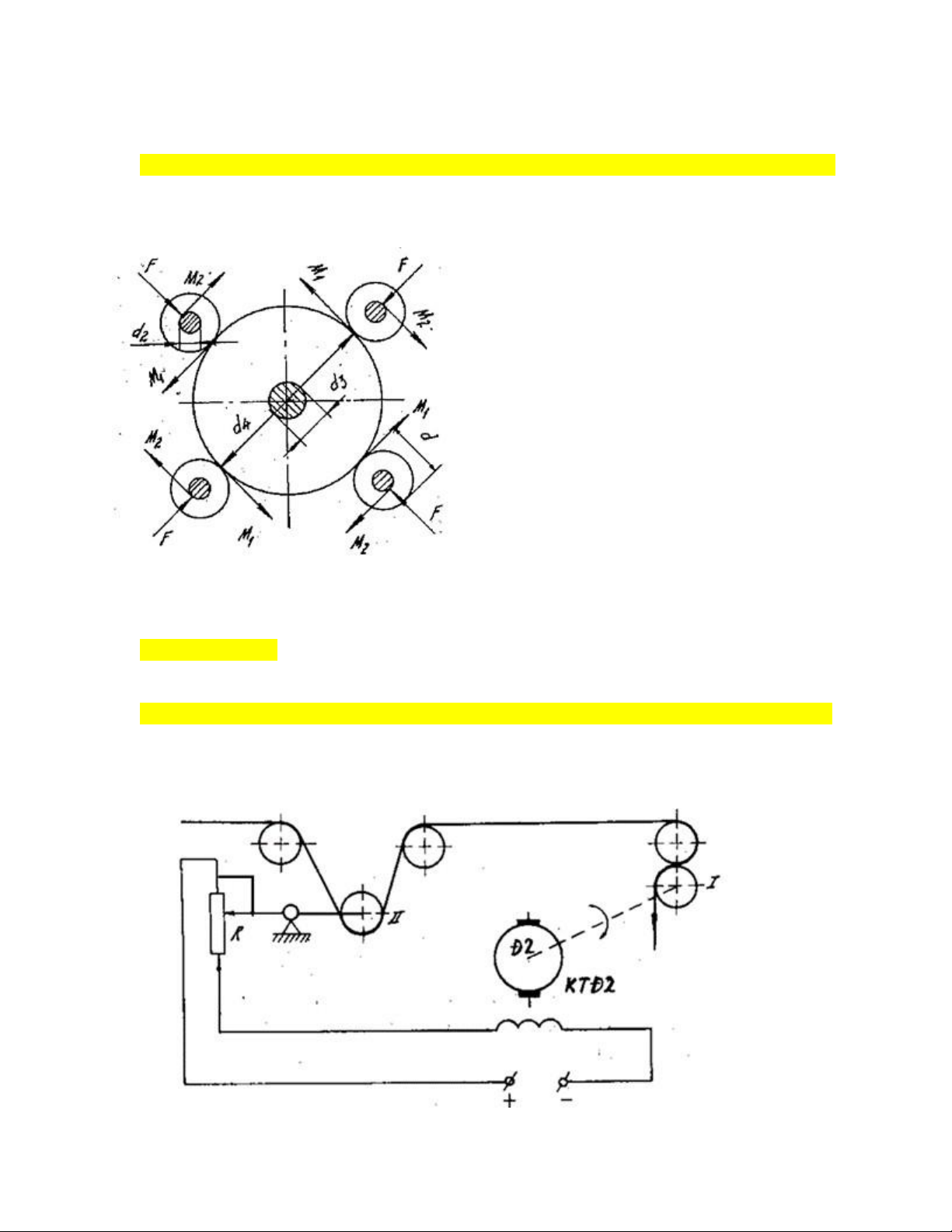
5. Để căng vải với một lực không đổi khi vải bị căng quá mức như hình vẽ, trục quay II, điện
trở R và tốc độ động cơ 2 sẽ như thế nào?
A. Trục II nâng cao, R tăng và động cơ 2 sẽ giảm tốc
B. Trục II nâng cao, R tăng và động cơ 2 sẽ tăng tốc
C. Trục II nâng cao, R giảm và động cơ 2 sẽ tăng tốc
D. Trục II nâng cao, R giảm và động cơ 2 sẽ giảm tốc
6. Đặc tính cơ của động cơ truyền động máy in cần có:
A. Đặc tính cơ gần giống đặc tính động cơ rotor lồng sóc lOMoAR cPSD| 58702377
B. Đặc tính cơ mềm để linh hoạt theo áp lực của trục in, điều này sẽ giúp đảm bảo chất lượng in trên vải
C. Đặc tính cơ có độ cứng cao vì áp lực lên quả lô in có thể thay đổi mà tốc động cơ phải ít thay đổi.
D. Đặc tính cơ có độ cứng thấp vì đảm bảo không bị đứt vải khi đang in
7. Công suất tiêu thụ của động cơ truyền động máy in có quả lô in như hình sẽ tăng khi
A. Lực ép lên quả lô in
B. Tốc độ của máy và lực ma sát ở cổ trục C. Tăng số trục in n D. Tất cả đều đúng
8. Để đảm bảo chất lượng in trên vải, ngoài vải lót người ta dùng thêm băng cao su để làm gì
A. Đảm bảo lực kéo của vải in một lực ổn định
B. Đảm bảo lực ép từ trục in lên vải một lực ổn định và tránh những lỗi do trầy xước, vênh của lô in C. Tất cả đều đúng
D. Đảm bảo vận tốc dài chuyển động của vải cần in không đổi
9. Để căng vải với một lực không đổi khi vải bị trùng như hình vẽ, trục quay II, điện trở R và
tốc độ động cơ 2 sẽ như thế nào? lOMoAR cPSD| 58702377
A. Trục II hạ xuống, R giảm và động cơ 2 sẽ giảm tốc
B. Trục II hạ xuống, R giảm và động cơ 2 sẽ tăng tốc C. Trục II hạ xuống, R
tăng và động cơ 2 sẽ giảm tốc
D. Trục II hạ xuống, R tăng và động cơ 2 sẽ tăng tốc
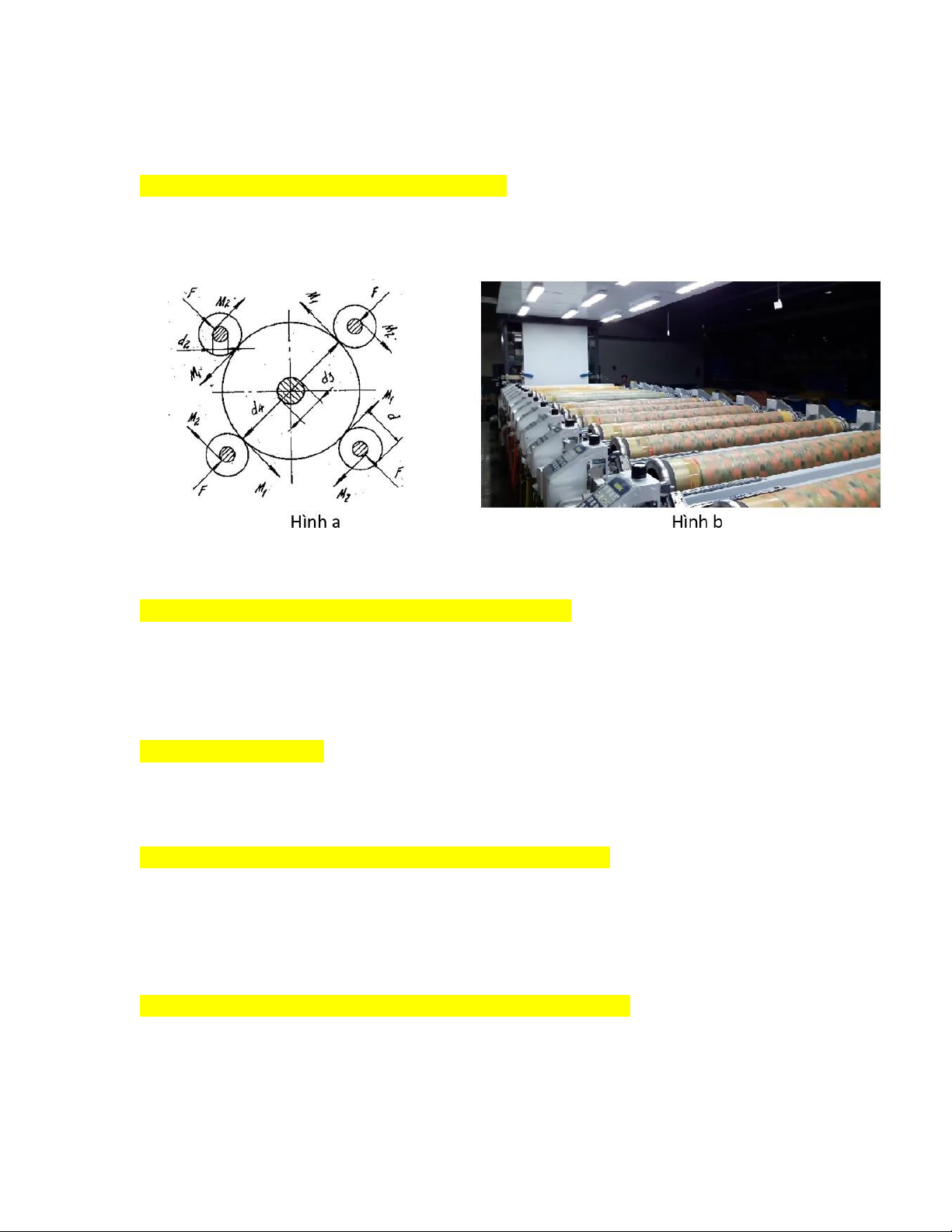
10. Giả sử quả lô in có đường kính d4, có khả năng in được tối đa là 4 màu như hình a nên để
cải tiến máy in được nhiều màu hơn, người ta thay đổi sang bỏ quả lô in như hình b. Cả hai
loại máy đều có tốc độ in vải là như nhau. Hãy cho biết tốc độ quay của các trục in ở 2 loại
máy trên có khác nhau không nếu bán kính trục in ở cả hai máy đều giống nhau
A. Vận tốc trục in máy hình a nhỏ hơn vận tốc trục in máy hình b B. Tùy thuộc thiết kế
C. Vận tốc trục in máy hình a lớn hơn vận tốc trục in máy hình b
D. Vận tốc trục in máy hình a bằng vận tốc trục in máy hình b
TRẮC NGHIỆM MÁY HÀM TRUYỀN 2
1. Cho biết tên của khâu có hàm truyền G(s) = K1+ K2/s + sK3 A. Khâu tỷ lệ vi phân B. Khâu tỷ lê
C. Khâu tỷ lệ vi tích phân
D. Khâu tỷ lệ tích phân
2. Biểu đồ Nyquist biểu diễn tín hiệu gì của đáp ứng đầu ra
A. Góc pha tín hiệu và Biên độ tin hiệu theo tần số trong tọa độ cực
B. Góc pha tín hiệu và Biên độ tin hiệu theo thời gian trong tọa độ decal
C. Góc pha tín hiệu và Biên độ tin hiệu theo tần số trong tọa độ decal
D. Góc pha tín hiệu và Biên độ tin hiệu theo thời gian trong tọa độ cực
3. Các hệ thống điều khiển được mô tả chủ yếu phương pháp nào?
A. Phương pháp hàm truyền đạt và phương pháp không gian trạng thái
B. Phương pháp không gian trạng thái và phương pháp vi tích phân
C. Phương pháp vi tích phân và phương pháp hàm truyền đạt D. Tất cả đếu đúng lOMoAR cPSD| 58702377
4. Lý do sử dụng toán học để mô tả hệ thống điều khiển nói chung và hệ thống điều khiển tự động nói riêng.
A. Dễ dàng khảo sát hệ thống trên máy tính số để đánh giá chất lượng của hệ thống
B. Rẻ tiền hơn hệ thống vật lý C. Tất cả đều đúng
D. Kết quả phụ thuộc vào độ chính xác của phép mô hình hóa từng đối tượng
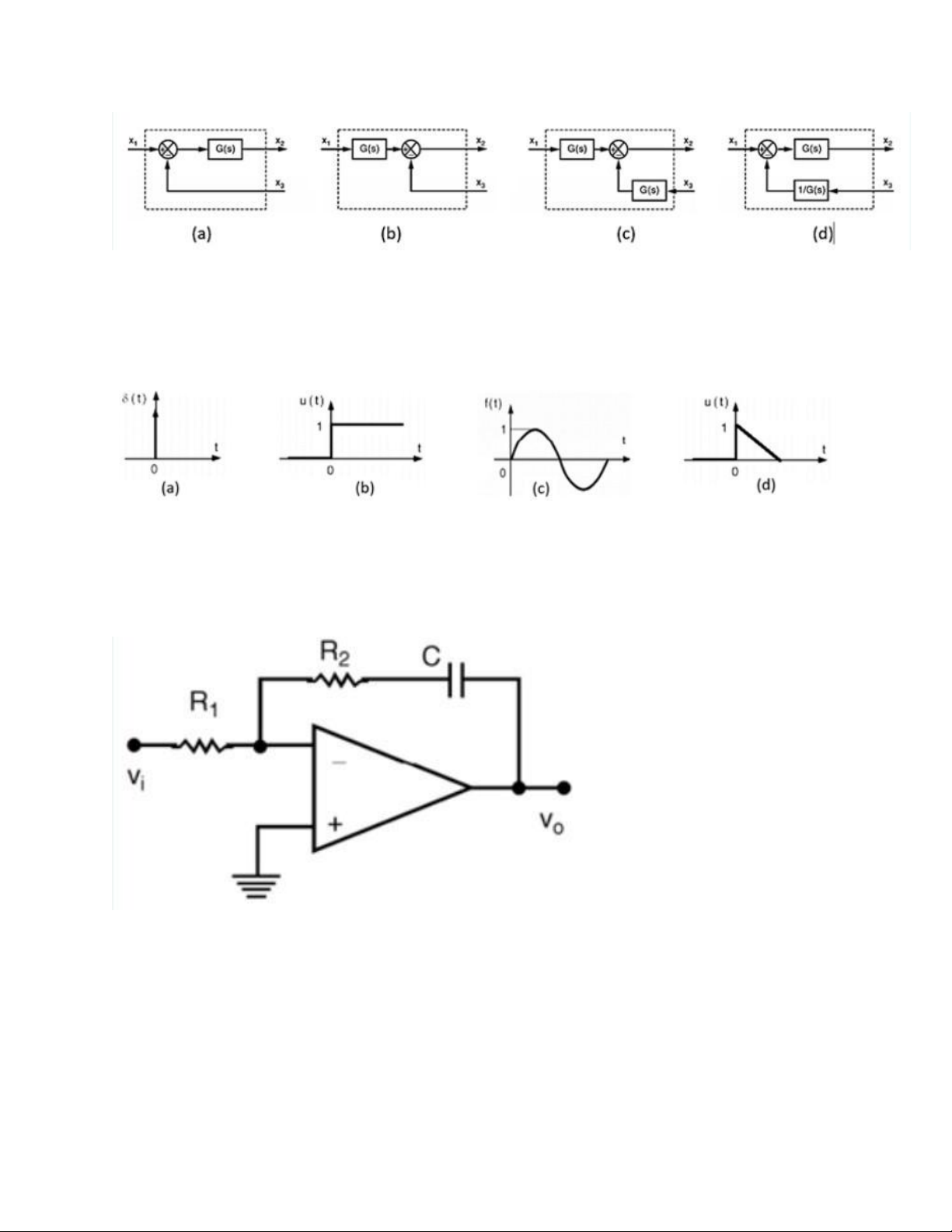
5. Đặc tính thời gian của hệ thống mô tả sự thay đổi tín hiệu ở đầu ra của hệ thống khi tín hiệu vào là A. Tất cả đều đúng
B. Hàm xung đơn vị và Hàm sóng sin điều hòa
C. Hàm xung đơn vị và hàm nấc đơn vị
D. Hàm nấc đơn vị và Hàm sóng sin điều hòa
6. Cho biết tên của khâu có hàm truyền G(s) = K1+sK2
A. Khâu tỷ lệ tích phân
B. Khâu tỷ lệ vi tích phân C. Khâu tỷ lệ vi phân D. Khâu tỷ lê
7. Cho biết tên của khâu có hàm truyền G(s) = K1 A. Khâu tỷ lệ vi phân
B. Khâu tỷ lệ tích phân
C. Khâu tỷ lệ vi tích phân D. Khâu tỷ lê
8. Đặc tính thời gian của một hàm truyền mô tả bằng đồ thị có Trục hoành và trục tung lần
lượt biểu thị thông số A. Thời gian và góc pha B. Thời gian và tần số
C. Góc pha và tần số của tín hiệu theo thời gian
D. Thời gian và biên độ tín hiệu
9. Cho biết tên của khâu có hàm truyền G(s) = K1 + K2/s A. Khâu tỷ lệ vi phân B. Khâu tỷ lê
C. Khâu tỷ lệ tích phân
D. Khâu tỷ lệ vi tích phân
10. Biểu đồ bode mô tả đáp ứng nào sau đây của hệ thống A. Cả hai đều đúng B. Cả hai đều sai
C. Góc pha tín hiệu và Biên độ tin hiệu theo tần số
D. Góc pha tín hiệu và Biên độ tín hiệu theo thời gian lOMoAR cPSD| 58702377
TRẮC NGHIỆM HÀM TRUYỀN 3
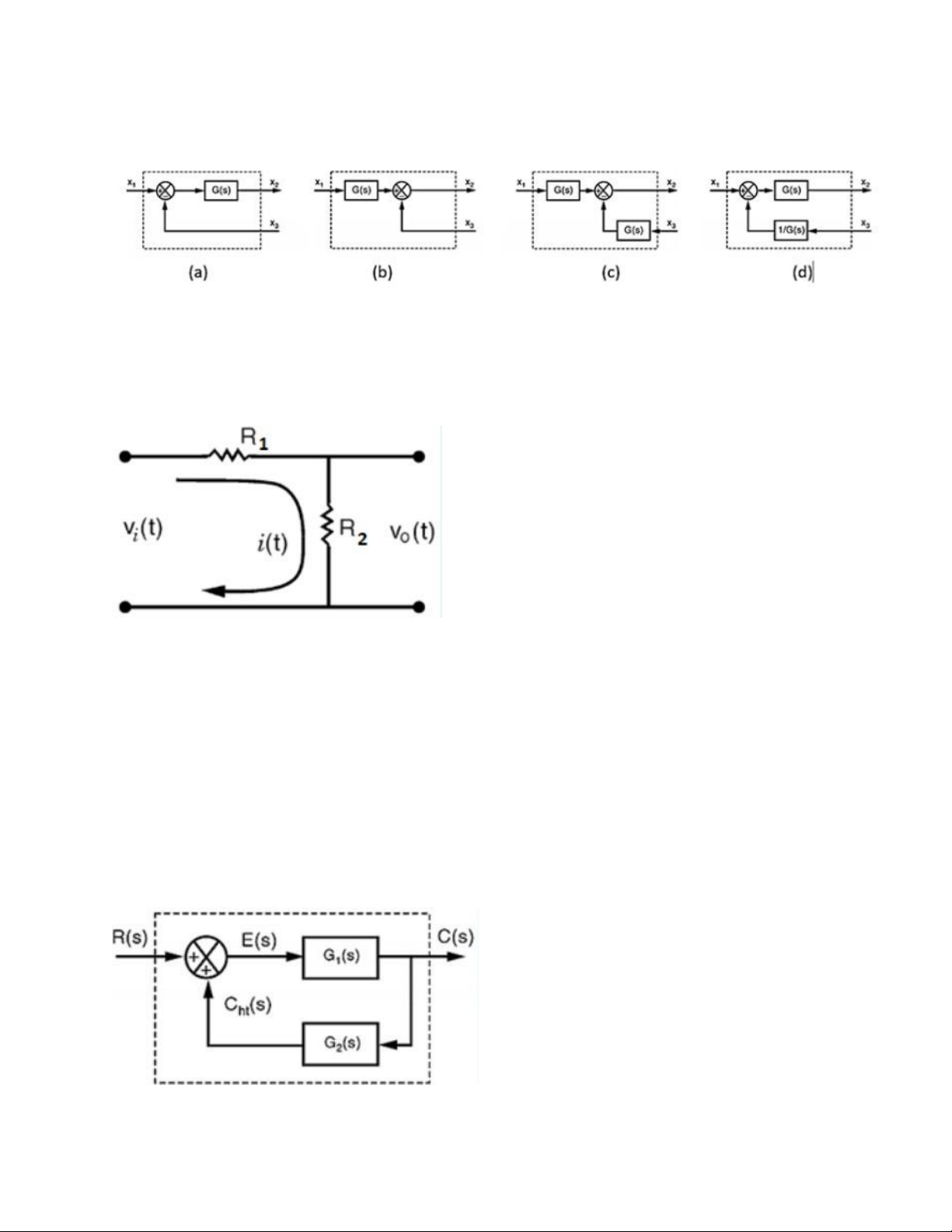
1.Sơ đồ tương đương của hình (a) là hình A. Hình (d)
B. Tất cả các hình đều không phù hợp C. Hình (c) D. Hình (b)
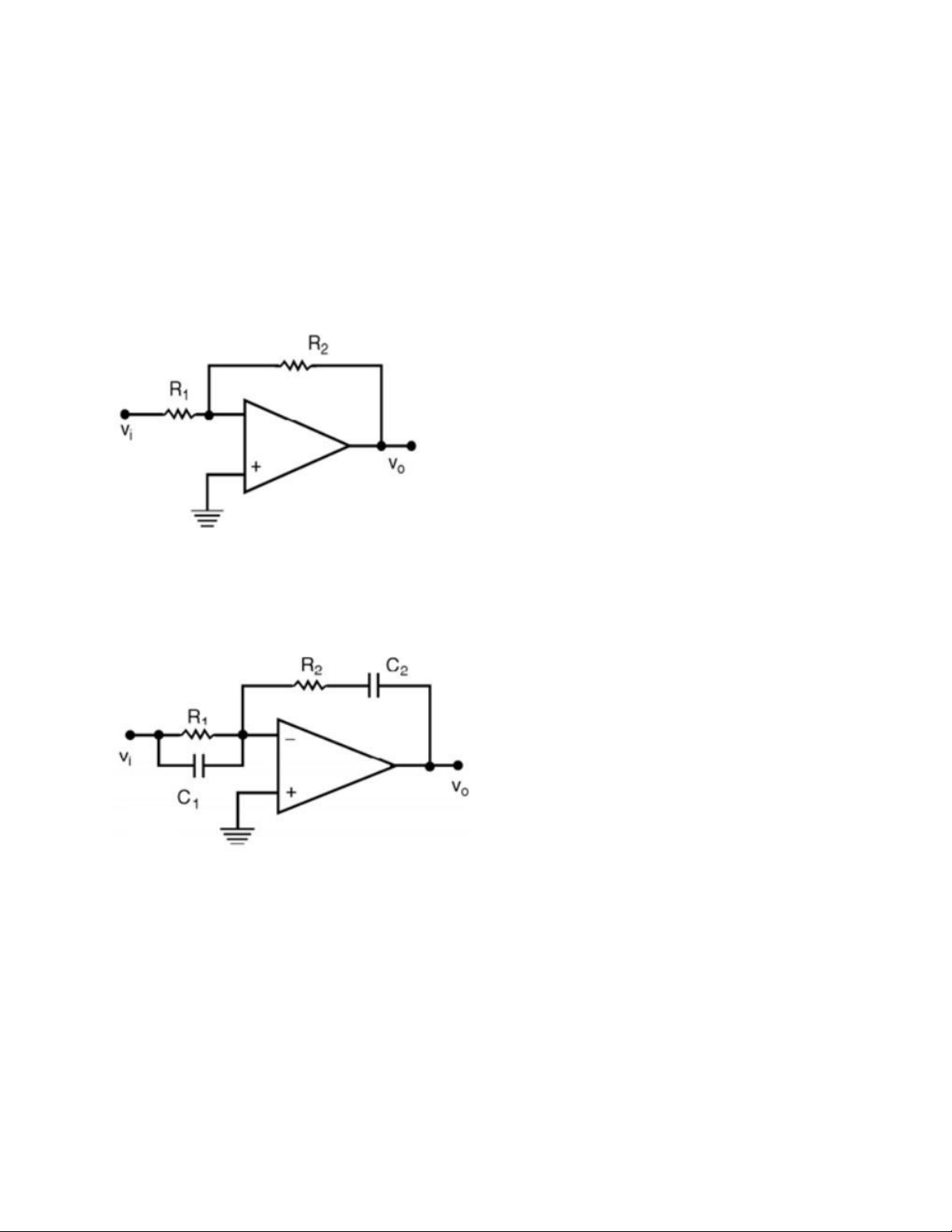
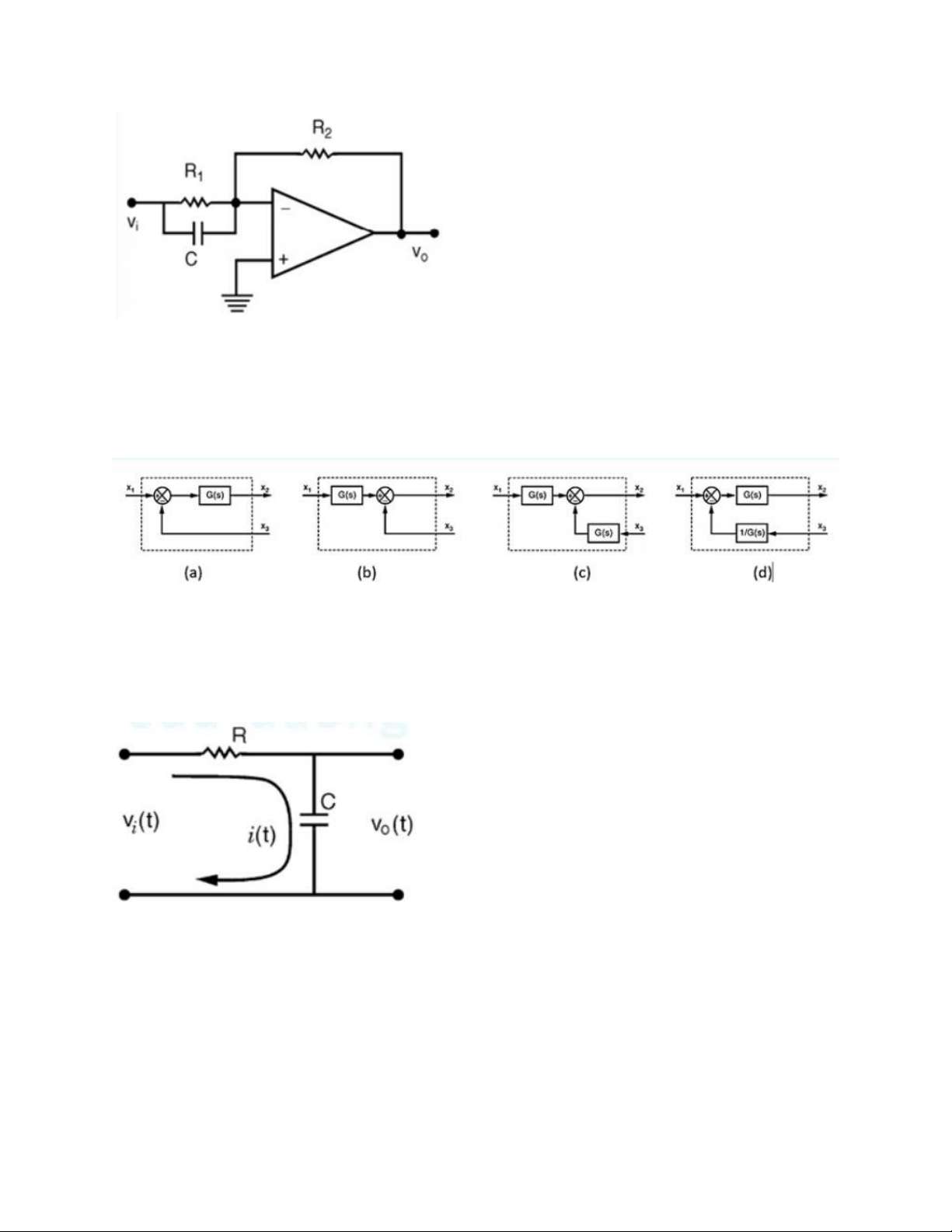
2. Sơ đồ mạch điện trong hình mô tả khâu?
A. Khâu tích phân (Khâu I) B. Khâu vi phân (Khâu D)
C. khâu tỷ lệ vi tích phân (Khâu PID) D. Khâu tỷ lệ (khâu P)
3. Đặc tính tần số của hệ thống tuyến tính liên tục mô tả quan hệ giữa tín hiệu ra và tín hiệu vào
củahệ thống ở trạng thái xác lập khi thay đổi
A. Biên độ của tín hiệu dao động điều hòa tác động ở đầu vào của hệ thống
B. Góc pha của tín hiệu dao động điều hòa tác động ở đầu vào của hệ thống
C. Tần số của hàm nấc đơn vị tác động ở đầu vào của hệ thống
D. Tần số của tín hiệu dao động điều hòa tác động ở đầu vào của hệ thống
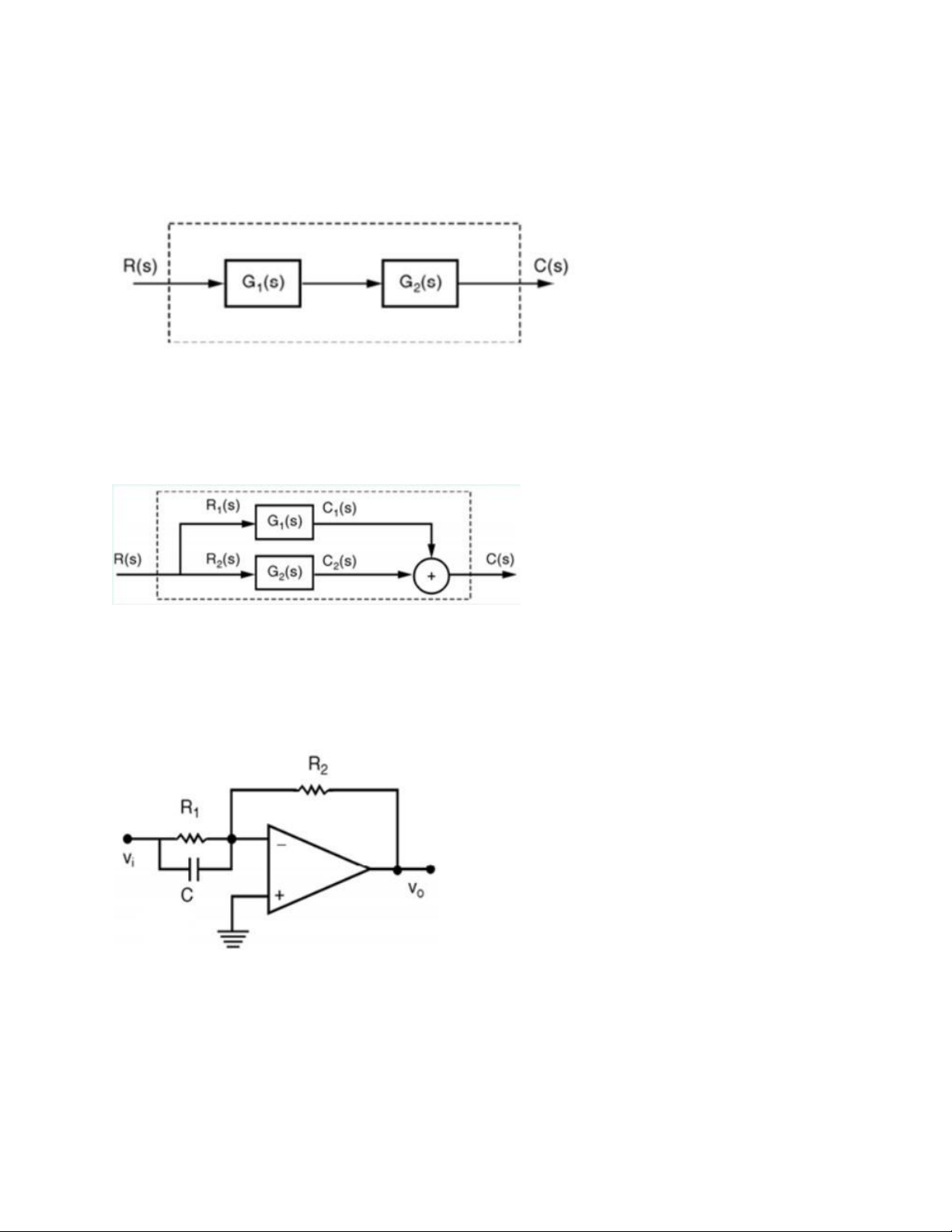
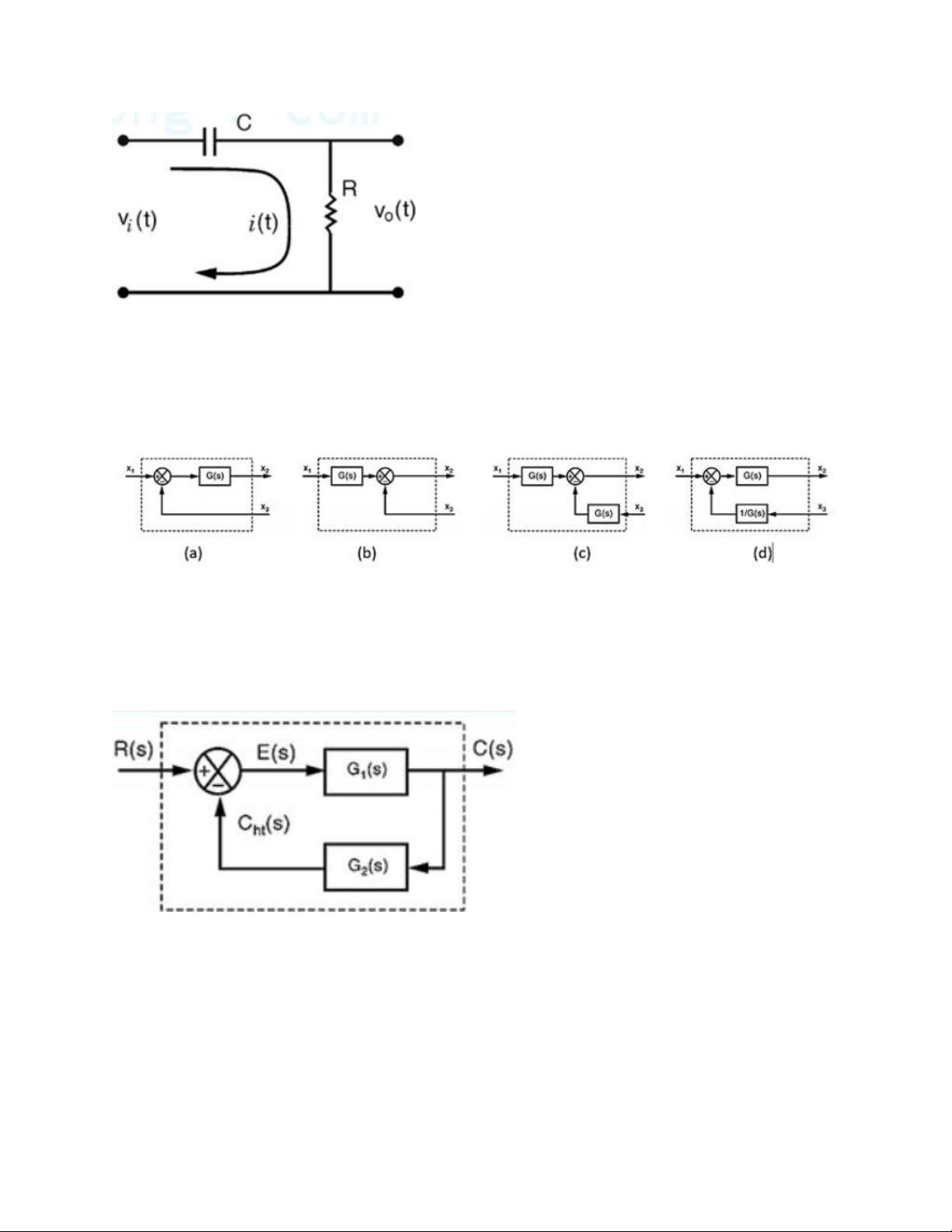
4. Hàm truyền tương đương của hàm truyền trong hình vẽ có dạng A. Gtd(s) = G1(s)xG2(s) lOMoAR cPSD| 58702377
B. Gtd(s) = G1(s)/(1+G1(s)G2(s)) C. Gtd(s) = G1(s)+G2(s)
D. Gtd(s) = G1(s)/(1-G1(s)G2(s))
5. Hàm truyền tương đương của hàm truyền trong hình vẽ có dạng
A. Gtd(s) = G1(s)/(1+G1(s)G2(s)) B. Gtd(s) = G1(s)+G2(s)
C. Gtd(s) = G1(s)/(1-G1(s)G2(s)) D. Gtd(s) = G1(s)xG2(s)
6. Hàm truyền tương đương của hàm truyền trong hình vẽ có dạng
A. Gtd(s) = G1(s)/(1+G1(s)G2(s))
B. Gtd(s) = G1(s)/(1-G1(s)G2(s)) C. Gtd(s) = G1(s)+G2(s) D. Gtd(s) = G1(s)xG2(s)
7. Sơ đồ mạch điện trong hình mô tả khâu?
A. khâu tỷ lệ vi tích phân (Khâu PID)
B. Khâu tỷ lệ vi phân (Khâu PD)
C. Khâu tỷ lệ tích phân (Khâu PI) D. Khâu tỷ lệ (khâu P)
8. Sơ đồ tương đương của hình (c) là lOMoAR cPSD| 58702377 A. .Hình (a) B. .Hình (b) C. Hình (d)
D. Cả hình (a) và (b) đều đúng
9. Hàm xung đơn vị là hàm có hình vẽ A. Hình (c) B. Hình (b) C. Hình (d) D. Hình (a)
10. Sơ đồ mạch điện trong hình mô tả khâu?
A. .Khâu tỷ lệ vi phân (Khâu PD) B. Khâu tỷ lệ (khâu P)
C. .khâu tỷ lệ vi tích phân (Khâu PID)
D. .Khâu tỷ lệ tích phân (Khâu PI)
TRẮC NGHIỆM HÀM TRUYỀN 4
1. Hàm trọng lượng của một hàm truyền là A. Tất cả đều đúng B. Đáp ứng xung lOMoAR cPSD| 58702377
C. Là đáp ứng của hàm truyền khi tín hiệu đầu vào là hàm đơn vị
D. .Biến đổi Laplace ngược của hàm truyền
2. Hàm quá độ của một hệ thống là A. Tất cả đều đúng B. .Đáp ứng nấc
C. Biến đổi Laplace ngược của hàm truyền
D. .Vi phân của đáp ứng xung
3. Sơ đồ mạch điện trong hình mô tả khâu?
A. .Khâu tỷ lệ vi phân (Khâu PD)
B. khâu tỷ lệ vi tích phân (Khâu PID)
C. Khâu tỷ lệ tích phân (Khâu PI) D. Khâu tỷ lệ (khâu P)
4. Sơ đồ mạch điện trong hình mô tả khâu?
A. .Khâu tỷ lệ tích phân (Khâu PI)
B. .khâu tỷ lệ vi tích phân (Khâu PID) C. Khâu tỷ lệ (khâu P)
D. .Khâu tỷ lệ vi phân (Khâu PD)
5. Sơ đồ mạch điện trong hình mô tả khâu? lOMoAR cPSD| 58702377 A. .Khâu tỷ lệ (khâu P)
B. khâu tỷ lệ vi tích phân (Khâu PID)
C. Khâu tỷ lệ tích phân (Khâu PI)
D. Khâu tỷ lệ vi phân (Khâu PD)
6. Sơ đồ tương đương của hình (b) là A. Hình (d) B. Không có hình đúng C. .Hình (a) D. .Hình (c)
7. Sơ đồ mạch điện trong hình mô tả khâu? A. Khâu vi phân (Khâu D) B. Khâu tỷ lệ (khâu P)
C. .Khâu tích phân (Khâu I)
D. .khâu tỷ lệ vi tích phân (Khâu PID)
8. Sơ đồ mạch điện trong hình mô tả khâu? lOMoAR cPSD| 58702377 A. Khâu tỷ lệ (khâu P)
B. .Khâu tích phân (Khâu I) C. Khâu vi phân (Khâu D)
D. khâu tỷ lệ vi tích phân (Khâu PID)
9. Sơ đồ tương đương tại hình (d) là A. .Hình (b) B. Hình (a) C. Hình (c)
D. Tất cả các hình đều không phù hợp
10. Hàm truyền tương đương của hàm truyền trong hình vẽ có dạng
A. .Gtd(s) = G1(s)/(1+G1(s)G2(s))
B. Gtd(s) = G1(s)/(1-G1(s)G2(s)) C. Gtd(s) = G1(s)xG2(s) D. .Gtd(s) = G1(s)+G2(s)
TRẮC NGHIỆM HÀM TRUYỀN 5
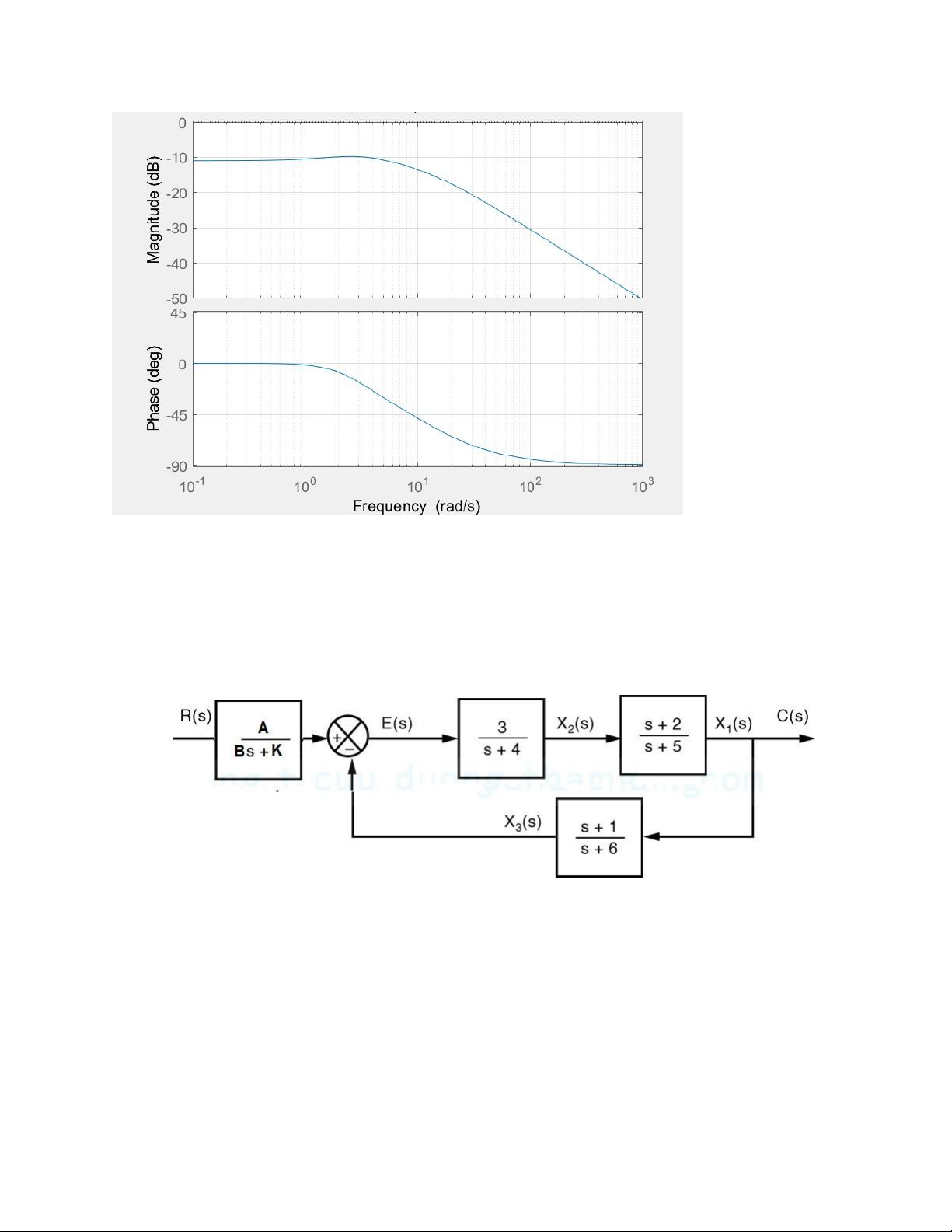
1. Cho biểu đồ bode của một hàm truyền có dạng như hình vẽ, Hãy cho biết hệ thống có ổn định không lOMoAR cPSD| 58702377 A. Hệ không ổn định
B. Không xác định được
C. Hệ ở biên giới ổn định D. Hệ ổn định
2. Cho một sơ đồ như hình vẽ, biết các giá trị K=1; B=9,4. Hãy cho biết A để hệ thống đạt giá
trị xác lập là 2pU biết tín hiệu R(s) là hàm nấc có giá trị là 6,5 A. A = 16,9 B. A = 1,1 C. A = 11,4 D. A = 6,5 Ko biết làm
3. Cho một đáp ứng có đang như hình vẽ, Cmax = 9,5 và Cxl = 6,8. Hãy tính độ vọt lố POT
của đáp ứng đầu ra.
Tài liệu liên quan:
-

Đáp án Trắc Nghiệm | Môn Điều khiển hệ thống điện công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
199 100 -

Trắc nghiệm Hệ Thống Điện và Máy Biến Áp | Môn Điều khiển hệ thống điện công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
127 64 -

Báo cáo cuối kỳ Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
224 112 -

Báo cáo Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
237 119