Báo cáo Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
Máy phát điện đồng bộ, hay còn được biết đến là máy phát điện xoay chiều, là một thiết bị có khả năng chuyển đổi năng lượng cơ học từ động cơ một chiều thành điện năng xoay chiều với các thông số điện áp và tần số xác định. Tài liệu được sưu tầm gồm 65 trang, giúp bạn ôn tập tốt hơn. Mời các bạn đón xem.
Môn: Điều khiển hệ thống điện công nghiệp (APM436564)L 10 tài liệu
Trường: Trường Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh 4.4 K tài liệu
Tác giả:






Preview text:
lOMoAR cPSD| 58702377
BỘ GIÁO DỤC VÀ ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT THÀNH PHỐ HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ BỘ MÔN ĐIỆN CÔNG NGHIỆP BÁO CÁO MÔN HỌC
ĐIỀU KHIỂN HỆ THỐNG ĐIỆN CÔNG NGHIỆP
GVHD: PGS.TS. Trần Quang Thọ Nhóm 1 SVTH MSSV Mức độ hoàn thành Nguyễn Đăng Cao Hoàng 22142123 100% % % Lớp: Thứ 7 tiết 1-5
Tp Hồ Chí Minh, ngày 11 tháng 5 năm 2025
CHƯƠNG 1: ĐIỀU KHIỂN MÁY PHÁT ĐỒNG BỘ 3 PHA ............................................. 3
1.1. Giới thiệu: .......................................................................................................................... 3
1.2. Mục tiêu: .......................................................................................................................... 11
1.3. Cơ sở điều khiển: ............................................................................................................. 12
1.4. Mô hình mô phỏng: ......................................................................................................... 13
1.5. Kết quả mô phỏng: .......................................................................................................... 21
1.6. Nhận xét kết quả mô phỏng và kết luận: ...................................................................... 22
CHƯƠNG 2: ĐIỀU KHIỂN ĐỘNG CƠ DC ....................................................................... 24
2.1. Giới thiệu: ........................................................................................................................ 24
2.2. Mục tiêu: .......................................................................................................................... 29
2.3. Mô hình mô phỏng: ......................................................................................................... 30
2.4 Nhận xét kết quả mô phỏng và kết luận: ....................................................................... 38
CHƯƠNG 3: ĐIỀU KHIỂN ĐỘNG CƠ 3 PHA ................................................................ 41
3.1 Giới thiệu ........................................................................................................................... 41
3.2. Mục tiêu ............................................................................................................................ 44
3.3. Nguyên lý điều khiển ....................................................................................................... 44
3.4. Công thức tính toán ........................................................................................................ 46
3.5. Mô hình mô phỏng .......................................................................................................... 48
3.6. Nhận xét kết quả mô phỏng và kết luận ....................................................................... 52
CHƯƠNG 4: NGHỊCH LƯU NỐI LƯỚI 1 PHA ............................................................... 55
4.1 Giới thiệu : ........................................................................................................................ 55
4.2.Mục tiêu ............................................................................................................................. 55
4.3 Nguyên lý điều khiển ........................................................................................................ 56
4.4 Mô hình mô phỏng : ......................................................................................................... 61
4.5 Nhận xét quả mô phỏng và kết luận: ............................................................................. 61
TÀI LIỆU THAM KHẢO: ...................................................................................................... 64
CHƯƠNG 1: ĐIỀU KHIỂN MÁY PHÁT ĐỒNG BỘ 3 PHA 1.1. Giới thiệu: 1.1.1. Khái niệm:
Máy phát điện đồng bộ, hay còn được biết đến là máy phát điện xoay chiều, là một
thiết bị có khả năng chuyển đổi năng lượng cơ học từ động cơ một chiều thành điện năng
xoay chiều với các thông số điện áp và tần số xác định. Đặc điểm nổi bật của động cơ đồng
bộ là vận hành ở một tốc độ duy nhất và ổn định, được gọi là tốc độ đồng bộ.
Đây là một trong những loại máy phát điện xoay chiều được ứng dụng rộng rãi nhất
hiện nay. Chúng đóng vai trò quan trọng trong nhiều lĩnh vực sản xuất điện năng như thủy
điện, nhiệt điện, điện hạt nhân, và cả trong các tổ máy phát điện diesel. 1.1.2. Cấu tạo:
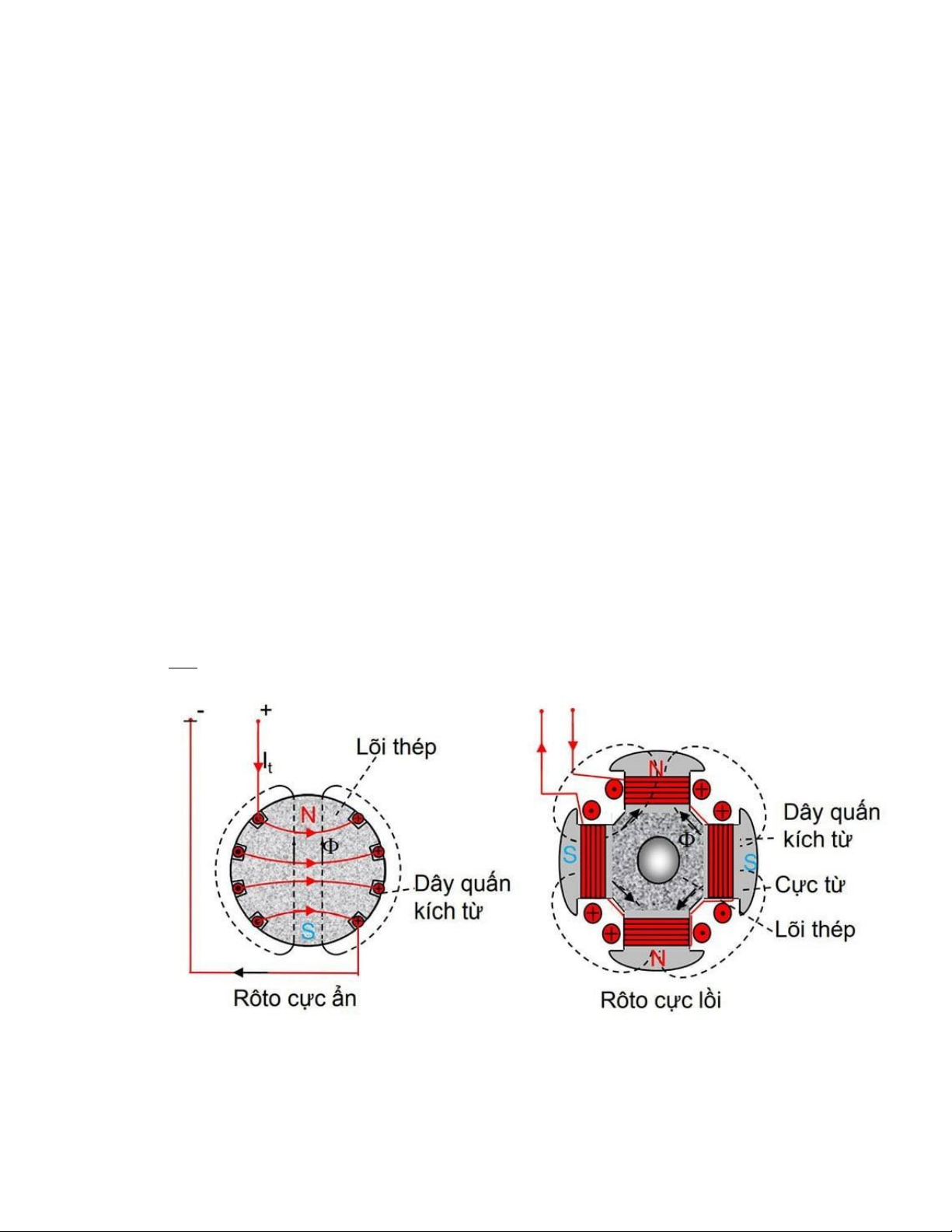
Máy phát điện ba pha hoạt động dựa trên hiện tượng cảm ứng điện từ. Cấu tạo gồm 2
phần: Rotor là nam châm (phần cảm) tạo ra từ trường rất manh, Stator là 3 cuộn dây đặt lệch nhau 120o (phần ứng).
Máy phát điện đồng bộ có tốc độ roto (n) bằng với tốc độ từ trường quay trong máy
(n1). Với máy phát điện nhóm chúng em lựa chọn là 1500 rpm, tần số lưới 50Hz thì với công
60f thức: n = p với P : là số cặp cực. Từ đó ta tính được P=2 cặp.
Hình 1. 1 Cấu tạo máy phát đồng bộ 3 pha
1.1.3. Nguyên lý hoạt động của Máy phát đồng bộ ba pha:
* Sơ đồ Máy phát đồng bộ
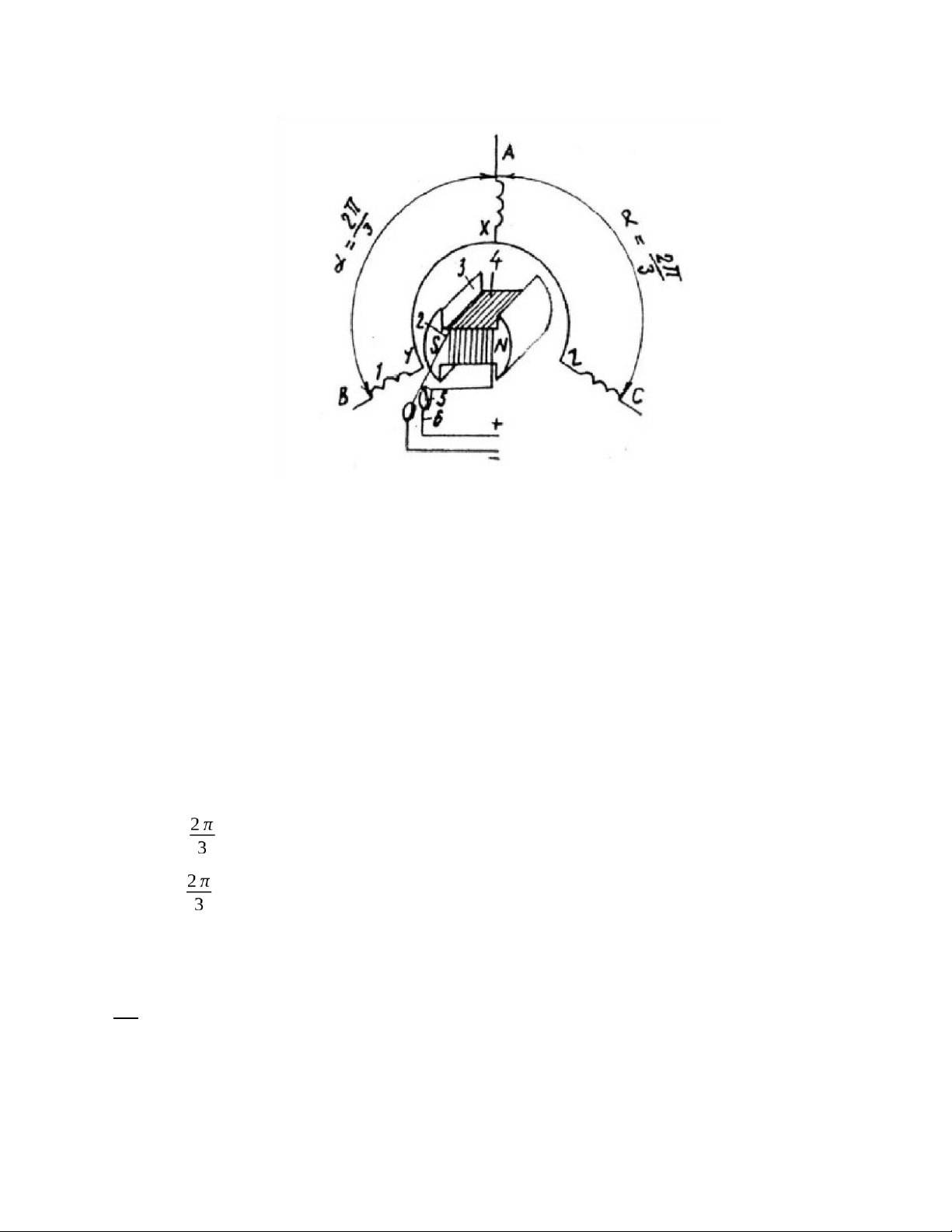
Hình 1. 2 Sơ đồ máy phát điện đồng bộ 3 pha 2 cực
Trên hình 1.2 biểu diễn sơ đồ máy phát đồng bộ 3 pha 2 cực. Cuộn dây phần ứng đặt ở Stator
còn cuộn dây phần cảm đặt ở Rotor. Cuộn dây kích từ được nối với nguồn kích từ (dòng 1
chiều) qua hệ thống chổi than.
Để nhận được điện áp 3pha trên chu vi Stator ta đặt 3 cuộn dây cách nhau 120o và được nối
sao (có thể nối tam giác ). Dòng điện một chiều tạo ra từ trường không đổi. Bây giờ ta gắn
vào trục Rotor một động cơ lai và quay với tốc độ n. Ta được một từ trường quay tròn có từ
thông chính khép kín qua Rotor, cực từ vaf lõi thép Stator. Từ thông này sẽ cắt các thanh dẫn
phần ứng làm xuất hiện trong 3 cuộn dây 3 suất điện động như nhau: e A=Em sinωt;
eB=Em sin(ωt− );
eC=Emsin(ωt+ );
Tần số biến thiên (ω) của các suất điện động này phụ thuộc vào tốc độ quay của Rotor. Nếu
số cặp cực là p thì tần số biến thiên của dòng điện sẽ là: 60f f= (1.1) p
Như vậy tần số biến thiên của dòng điện phụ thuộc vào tốc độ quay của Rotor và số đôi cực.
Nếu ba pha của máy điện được tải bằng 3 tải đối xứng, ta có 3 pha đối xứng.
Theo nguyên lý tạo từ trường quay nên trong máy phát đồng bộ lúc này cũng xuất hiện từ
trường quay mà tốc độ được xác định bằng biểu thức: 60 f ntt= p (1.2)
Thay (1.1) vào (1.2) ta có n = ntt . Nghĩa là trong máy phát đồng bộ quay của Rotor (tốc độ
quay của từ trường kích từ) và tốc độ quay của từ trường tải bằng nhau. Hai từ trường này ở
trạng thái nghỉ với nhau.
Các đặc tính của Máy phát đồng bộ
Để phân tích máy phát đồng bộ người ta dựa vào các đặc tính lấy được từ thí nghiệm hay xây
dựng trên cơ sở của đồ thị vector. Thông thường các máy điện đồng bộ làm việc với tốc độ
không đổi nhằm giữ cho tần số không đổi. Vì thế các đặc tính được lấy với tốc độ không đổi.
Để so sánh các máy điện có cấu tạo, công suất khác nhau người ta không dùng các đại lượng
vật lý mà dùng đại lượng tương đối. Ở hệ thống đo lường này các đại lượng điện áp, dòng
điện, công suất được biểu biễn bằng phần trăm đại lượng so sánh (đại lượng cơ bản) được
nhận giá trị 1. Ở máy điện đồng bộ các đại lượng sau đây được coi là đại lượng cơ bản (so sánh)
Công suất định mức Pđm=U đm Iđm.m
Điện áp pha định mức khi chạy không tải U Dòng đm=Eo định mức pha Iđm. Moment định mức Mđm.
Tốc độ quay định mức của Rotor ωđm. Eo Tổng
trở định mức Zđm= Iđm .
Trên cơ sở các đại lượng cơ bản này ta biểu diễn các đại lượng khác của máy đồng bộ ở đại
lượng tương đối (thêm dấu sao ) như sau: P (1.3) U P¿= ; U¿= ; (1.4) Pđm Uđm I M I¿= ; M¿= ; Iđm (1.5) Mđm (1.6) Đặc tính không tải
Đặc tính không tải là mối quan hệ giữa hàm sđđ với dòng kích từ
Eo=F(Ikt ) khi dòng tải I=0 và n=nđm .
Ở chế độ không tải điện áp U bằng sđđ pha U = Eo.
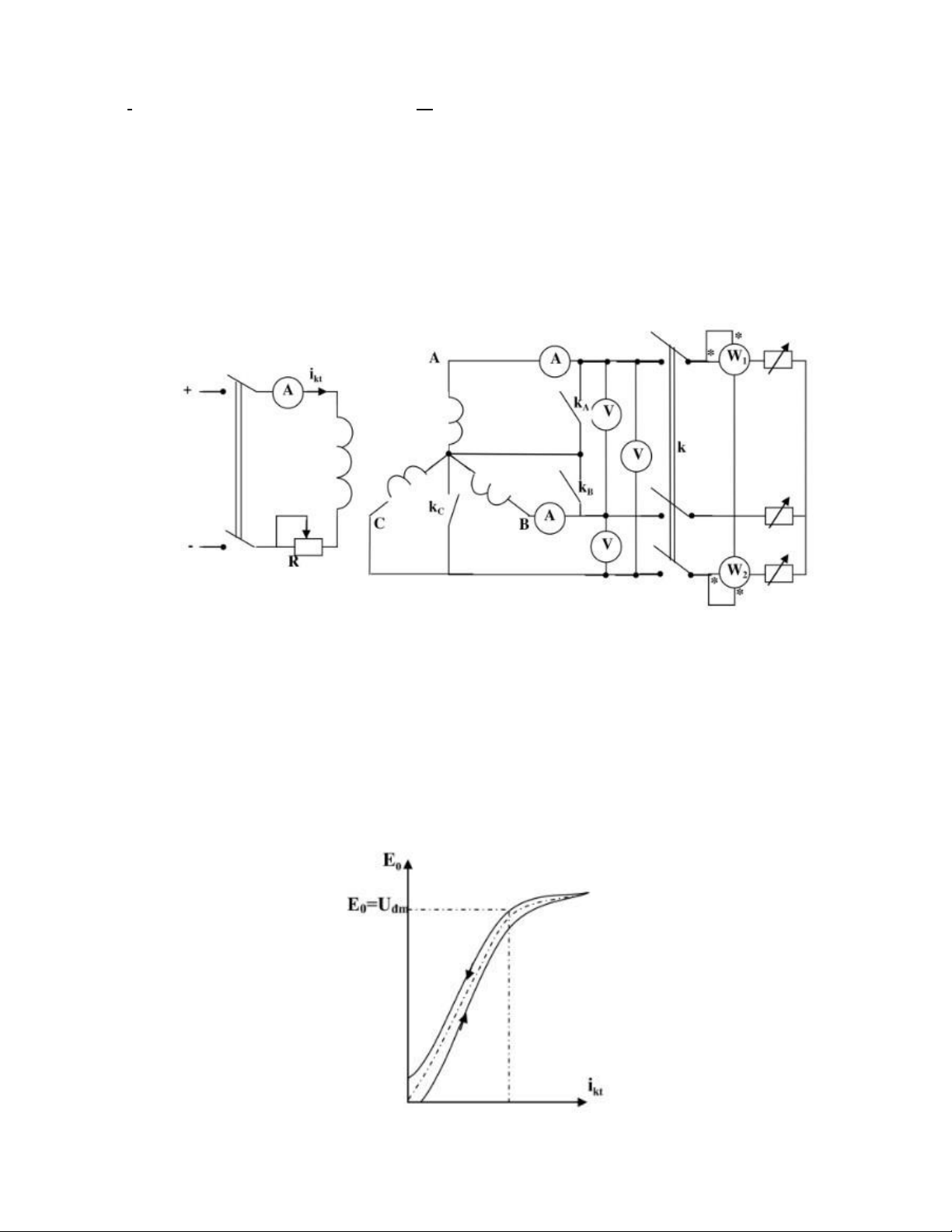
Hình 1. 3 Sơ đồ nối mạch để lấy các đặc tính máy phát
Để có đặc tính không tải ta mở các khoá k, kA, kB, kC rô to quay với tốc độ không đổi, bằng
điện trở R ta có thể thay đổi dòng kích từ từ giá trị lớn nhất tới giá trị nhỏ nhất. Số chỉ các
đồng hồ sẽ cho ta các giá trị cần thiết. Từ chỉ số của các đồng hồ ta dựng mối quan hệ Eo=f
(Ikt) Đặc tính biểu diễn trên hình 1.4
Do có hiện tượng từ trễ đặc tính Eo=f (Ikt) khi ikt tăng và khi ikt giảm không trùng nhau. Điểm
cắt của đặc tính với trục trung (khi ikt = 0 ) là đại lượng sđđ dư của máy phát.
Hình 1. 4 Đặc tính không tải máy phát đồng bộ
Tính không tải cho các máy phát khác nhau cắt nhau tại một điểm. Nếu đường nào nằm trên
điểm đó sẽ có độ bão hoà lớn hơn. Để tiện cho tính toán ta thường dùng đặc tính không tải
trung bình là đường đi qua điểm gốc toạ độ và không có vùng từ trễ (đường không liên tục). Đặc tính ngắn mạch
Đặc tính ngắn mạch là mối quan hệ giữa dòng điện ngắn mạch với dòng kích từ khi điện áp U=0 và n=nđm.
Ngắn mạch có thể3 pha khi cả 3 khoá kA, kB, kC đóng (hình 1.23) , hia pha khi kA và kB đóng,
và 1 pha khi kA đóng (hoặc kB hay kC).
Khi làm thí nghiệm ngắn mạch thường cho dòng kích từ nhỏ nên mạch từ không bão hoà, do
đó mối quan hệ Ingm=f (Ikt ) thường tuyết tính. Sự phi tuyến chỉ xuất hiện khi dòng ngắn mạch
vượt giá trị đinh mức nhiều.
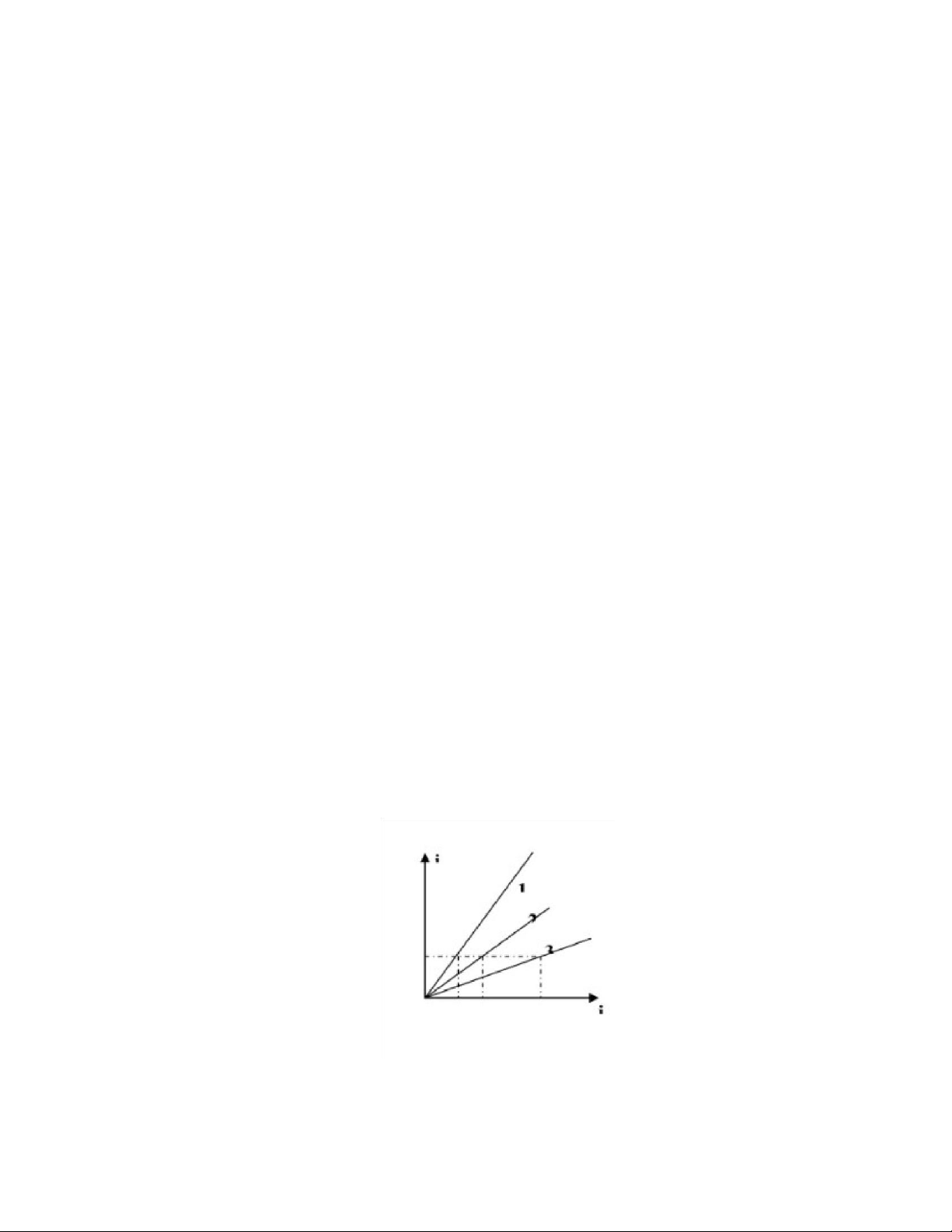
Trên biểu diễn đặc tính ngắn mạch cho 3 trường hợp: Ngắn mạch 3 pha (đường 3), 2 pha
( đường 2) và 1 pha (đường 1).
Từ hình vẽ chúng ta thấy rằng vi ngắm mạch 3 pha có phản ứng phần lớn nên nằm dưới cùng,
sau đó là ngắn mạch 2 pha và nằm trên cùng là ngắn mạch một pha.
Nếu máy có từ dư thì đường đặc tính sẽ cắt trục tung tại điểm tương ứng với từ dư.
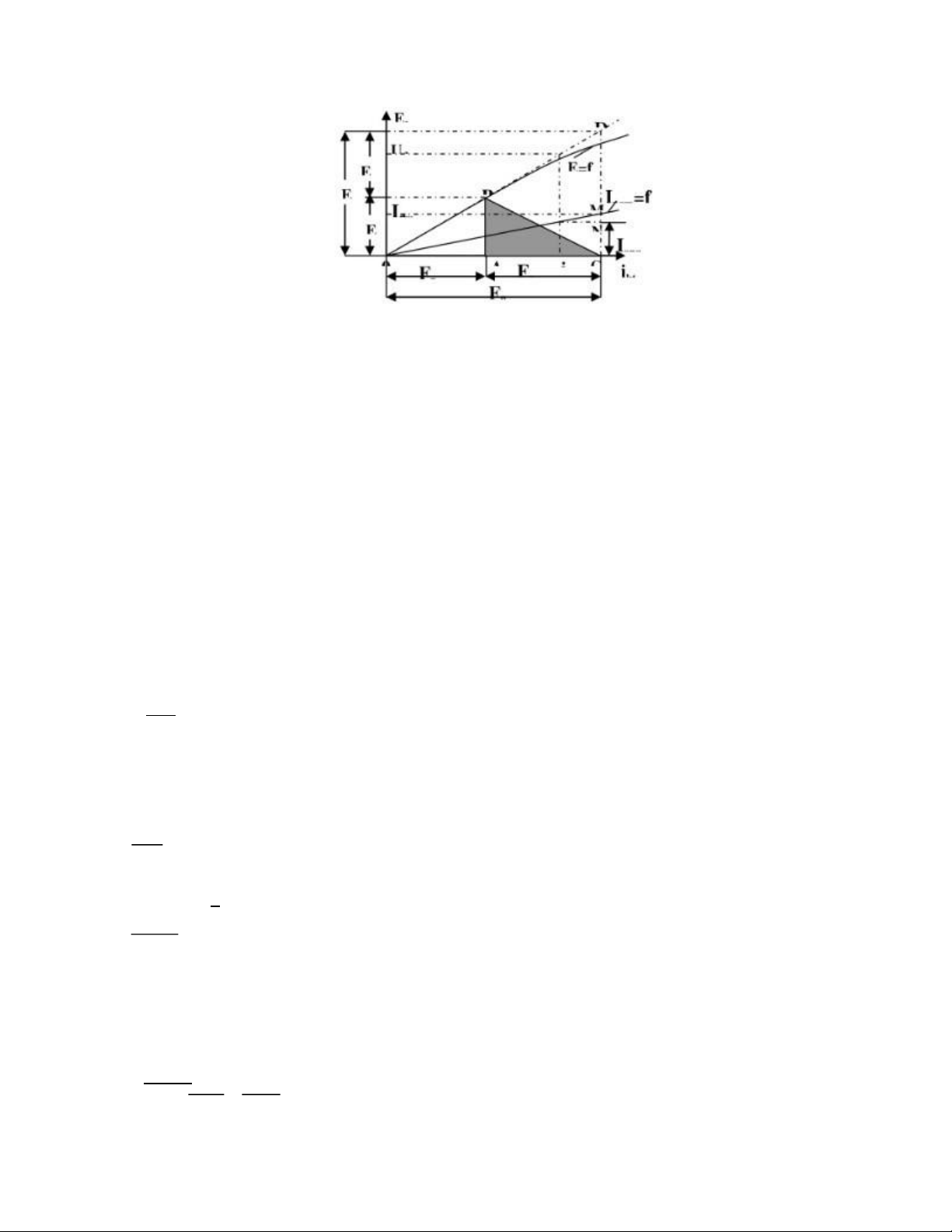
Đặc tính không tải cùng với đặc tính ngắn mạch cho phép ta xác định được tam giác đặc
trưng, và ta có thể sử dụng tam giác đặc trưng này để dựng đồ thị véc tơ. Khi ngắn mạch đối
xứng (3 pha) ta đặt dòng kích từ I
sao cho dòng ngắn mạch của máy bằng dòng định mức ktngm
thì stđ của các cực từ F sẽ tạo ra cho sđđ . Nếu bỏ qua hiện tượng bão hoà từ thì đó là điểm o Eo
D (đường thẳng kéo dài của đường không tải).
Hình 1. 5 Đặc tính ngắn mạch máy phát đồng bộ: 1/ Ngắn mạch một pha. 2/ Ngắn mạch hai pha. 3/ Ngắn mạch ba pha.
Hình 1. 6 Xác định tỉ số ngắn mạch
Như phần trước đã nói dòng ngắn mạch ổn định này chỉ là thành phần dòng dọc trục I và ngm=Iad
stđ của phản ứng phần ứng F sẽ có tác dụng khử từ do vậy stđ tổng: ad E
(1.7) sẽ nhỏ hơn một đại lượng xác định bằng:
p=Es=Idm X sad Eo Ead E (1.8) tức là: ad=Idm X ad E (1.9)
p=Eo−Ead
Đặt E lên đặc tính không tải ta có điểm B. Trong tam giác ABC có: , . p
AC=Fad AB=Ep
- Tỷ số ngắn mạch: Đó là tỷ số dòng ngắn mạch đối xứng với dòng định mức. Theo định nghĩa ta có: Iongm
Kngm= Idm (1.10) vì rằng: U dm Iongm= Xd (1.11) thì Udm 1 Kngm=
Idm X d = Xd¿ (1.12)
Trong đó: X¿ là đại lượng tương đối. d
Từ tam giác đặc trưng ta có : CN Iongm Iokt
Kngm=CM= I (1.13) dm =Iktngm
Như vậy hệ số ngắn mạch có thể tính được bằng tỷ số dòng kích từ.
Hệ số ngắn mạch là một thông số rất quan trọng của máy điện vì cùng với X ta có thể xác d
định được giới hạn của tải ở chế độ công tác ổn định. Nếu hệ số ngắn mạch càng lớn thì giới
hạn tải càng lớn. Với máy điện cực ẩn hệ số ngắn mạch có giá trị 0,8÷1,8; còn cực hiện 0,4÷0,7
và ở các máy phát điện tàu thuỷ hệ số ngắn mạch có giá trị 0,6÷1,0. Đặc tính tải
Đặc tính tải là mối quan hệ giữa điện áp và dòng kích từ khi I=¿const, cos φ=const và n=n . đm
Đặc tính này không liên quan trực tiếp tới một chế độ nào của máy phát và được dùng như
đặc tính phụ để biểu diễn một số đặc điểm của máy và xác định một số thông số của máy, ví
dụ: trở kháng của máy. Đặc tính tải quan trọng nhất là đặc tính tải thuần kháng. (cos φ=0, φ=
) vì thế để thực hiện thí nghiệm ở hình 10.18 người ta dùng tải là biến áp tự ngẫu hay cuộn
kháng có độ cảm kháng thay đổi.
Mở công tắc kA, kB, kC và đóng công tắc k, thay đổi tải, thay đổi điện trở kích từ R, giữ I =
const. Để giữ cosφ=const ta có thể điều chỉnh mô men của động cơ lai.
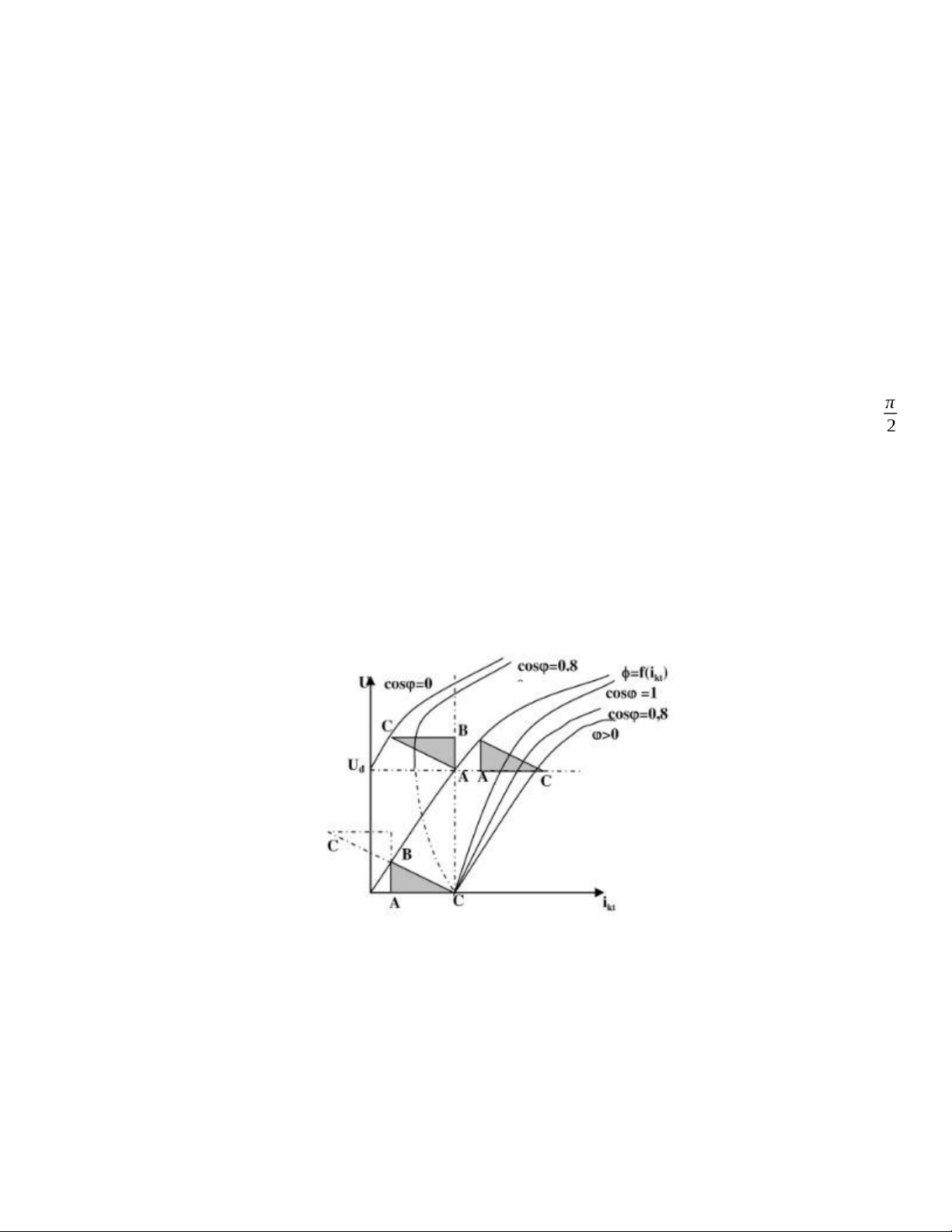
Trên hình 1.7 chúng ta biểu diễn đặc tính tải cho các loại tải khác nhau (có sự phản ứng phần ứng khác nhau).
Hình 1. 7 Đặc tính tải của máy điện đồng bộ
Khi tải thuần cảm thì chỉ có phản ứng phần đứng dọc trục nên để có đặc tính tải thuần cảm ta
có thể thực hiện như sau: Cho đỉnh B của tam giác đặc trưng dịch chuyển tịnh tiến trên đặc
tính không tải thì đỉnh C vẽ cho ta đặc tính tải thuần cảm (cos φ=0, φ>0) còn đặc tính tải có
cosφ=0,8 nằm trên đặc tính cos φ=0. Cần lưu ý rằng các đặc tính này không song song với đặc
tính không tải. Đặc tính cos φ=0, φ<0 có phản ứng phần ứng trợ từ nên đặc tính tải nằm trên
đặc tính không tải.( hình 1.7) Đặc tính ngoài
Đó là mối quan hệ hàm giữa điện áp trên cực phát với dòng tải khi Ikt=const, n=const và cos
φ=const. Để nghiên cứu đặc tính tải ta dựa vào phương trình cân bằng sđđ và phân biệt cho các loại tải khác nhau.
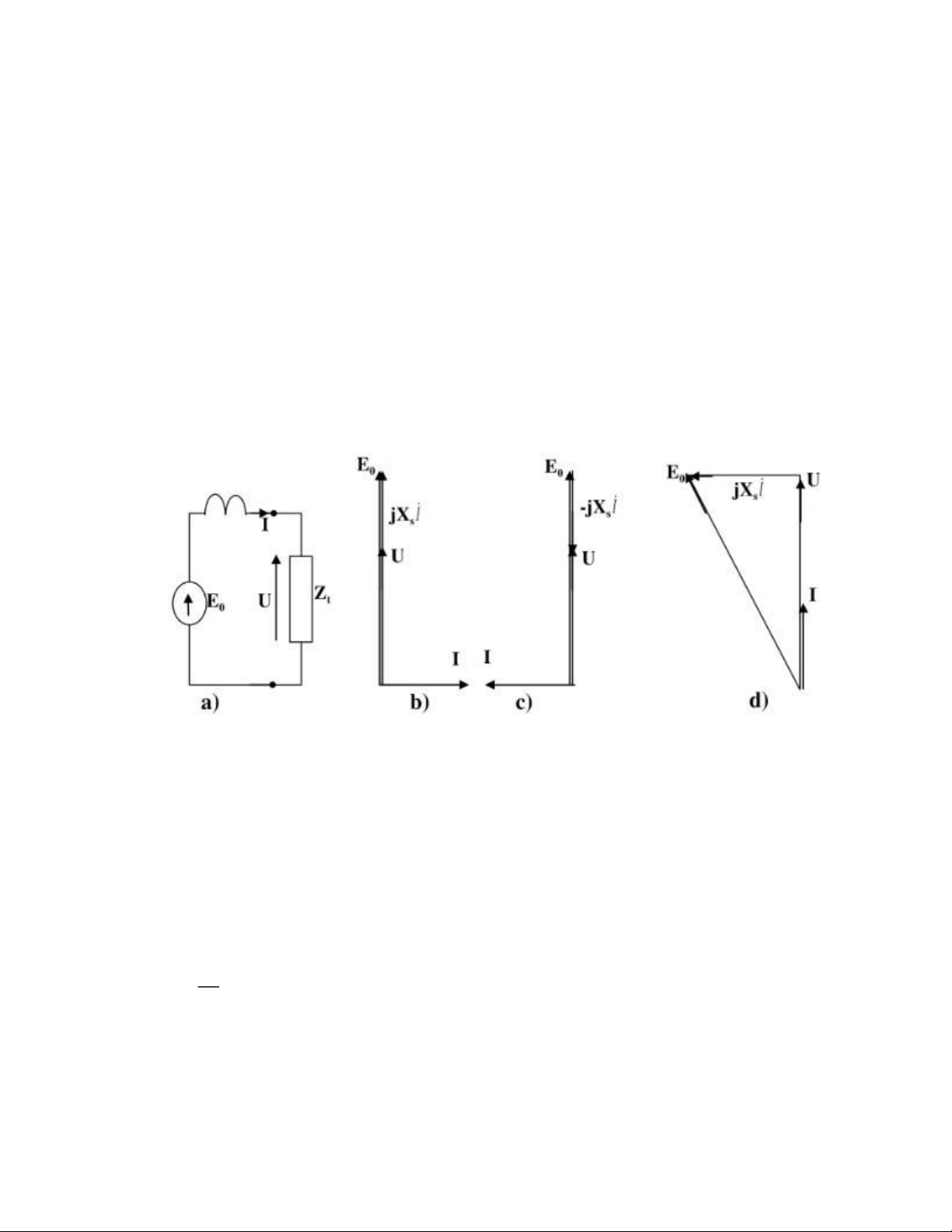
Phương trình cân bằng sđđ cho máy phát điện đồng bộ bỏ qua điện trở thuần cuộn dây dạng:
U˙ =E˙o ±J˙ X s I˙(1.14). Dấu “+” cho trường hợp tải thuần dung, dấu “-” cho tải thuần cảm. Từ
(1.14) ta dựng đồ thị vector.
Cho trường hợp ti thuần cảm (Zt=Xt).
Hình 1. 8 a/ Sơ đồ tương đương máy điện đồng bộ. b/ Đồ thị vector khi tải thuần cảm.
c/ Đồ thị vector khi tải thuần dung. d/ Đồ thị vector khi tải thuần trở
Ta thấy vector Eo và E˙o+J˙ X s I˙ trùng phương, nên ta có thể bỏ cách viết dạng vector và được:
Eo=U+X s I (1.15)
Vì ikt=const , n = const nên Eo=const, do vậy mối quan hệ U=f(I) là một đường thẳng đi qua
Eo hai điểm Eo (khi không tải
I=0) và Ingm= Xs (khi U=0, tức là ngắn mạch). Khi tải thuần dung
Phương trình cân bằng sđđ có dạng:
U˙ =E˙o ±J˙ X s I˙
Đồ thị vector biểu diễn như hình 1.7c . Giống như khi tải thuần cảm phương của Eo và
E˙o−J˙ Xs I˙ trùng nhau nên ta có thể viết:
Eo=U−Xs I (1.16) 1.2. Mục tiêu:
1.2.1. Tính cần thiết:
Việc điều khiển máy phát đồng bộ 3 pha là cực kỳ quan trọng trong hệ thống điện 3 pha vì nó
đảm bảo sự ổn định và hiệu suất của hệ thống. Dưới đây là một số lý do cần thiết của việc
điều khiển máy phát đồng bộ 3 pha: -
Đảm bảo ổn định trong phân phối điện: Máy phát đồng bộ giúp cân bằng tải giữa
các máy phát và đảm bảo rằng mỗi máy phát đang chia sẻ tải một cách đồng đều. Điều này
giúp tránh các vấn đề như quá tải hoặc quá ít tải, tăng tuổi thọ và hiệu suất của máy phát. -
Chống gián đoạn điện: Bằng cách đồng bộ hóa máy phát, chúng ta có thể tránh được
sự gián đoạn trong nguồn cung cấp điện. Nếu một máy phát bị hỏng, các máy phát khác có
thể tiếp tục cung cấp điện mà không gây ra sự cố nghiêm trọng cho hệ thống. -
Tiết kiệm năng lượng và tăng hiệu suất: Việc điều khiển máy phát đồng bộ giúp tối
ưu hóa hoạt động của các máy phát, ngăn chặn các máy phát hoạt động không đồng bộ và lãng phí năng lượng. -
Đảm bảo độ tin cậy của hệ thống: Khi các máy phát đồng bộ hoạt động cùng nhau,
độ tin cậy của hệ thống tăng lên. Điều này giúp đảm bảo rằng nguồn cung cấp điện luôn có
sẵn và không gây ra sự cố không mong muốn. -
Dễ dàng mở rộng hệ thống: Khi cần mở rộng hệ thống, việc thêm máy phát mới vào
hệ thống sẽ dễ dàng hơn khi đã có quy trình điều khiển đồng bộ được thiết lập.
Tóm lại, việc điều khiển máy phát đồng bộ 3 pha không chỉ cần thiết để đảm bảo sự ổn định
và hiệu suất của hệ thống điện mà còn để tăng độ tin cậy và tiết kiệm năng lượng trong quá trình vận hành. 1.2.2. Ứng dụng:
Nhu cầu sử dụng máy phát điện ngày nay rất lớn, vì thời đại công nghiệp hóa- hiện đại
hóa thì sẽ có rất nhiều nhà máy mà buộc phải hoạt động liên tục, nếu có sự cố mất điện ở lưới
thì phải có phương án dự phòng cho những phụ tải loại 1, những tải quan trọng. Còn những
doanh nghiệp, xí nghiệp nhỏ, không có những tải quan trọng thì họ cũng sẽ sử dụng máy phát
để cấp điện cho văn phòng, hành chính khi cúp điện.
Vì khi cúp điện thì tổn hao nó gây ra rất lớn cho doanh nghiệp nên dù ít hay nhiều thì
họ vẫn sẽ chỉ ra một khoản để lắp đặt hệ thống điện dự phòng. Đa số người ta sẽ sử dụng máy
phát 3 pha đồng bộ và máy phát mà nhóm em sẽ nghiên cứu, mô phỏng và điều khiển sẽ là:
Máy phát điện đồng bộ 3 pha 50Hz, 400V, 250kVa, 1500 rpm.
1.2.3. Yêu cầu kỹ thuật:
Yêu cầu kỹ thuật cho việc điều khiển máy phát đồng bộ 3 pha có thể bao gồm các yếu tố sau: -
Đồng bộ hóa máy phát: Hệ thống điều khiển cần có khả năng đồng bộ hóa các máy phát với
nhau và với mạng điện. Điều này đòi hỏi một hệ thống kiểm soát phức tạp để đảm bảo rằng tần
số, pha và điện áp của các máy phát đều đồng nhất. -
Kiểm soát tải chia đều: Hệ thống điều khiển cần có khả năng phân phối tải một cách
đồng đều giữa các máy phát để tránh tình trạng quá tải hoặc quá ít tải. -
Bảo vệ và an toàn: Yêu cầu bảo vệ bao gồm bảo vệ quá dòng, quá áp, quá tải và bảo
vệ quá tần số. Hệ thống cũng cần có các chức năng an toàn như tự động ngắt kết nối nếu phát
hiện sự cố nghiêm trọng. -
Tương tác với hệ thống điều khiển cấp cao hơn: Hệ thống điều khiển máy phát cần
có khả năng tương tác với các hệ thống điều khiển cấp cao hơn như hệ thống quản lý năng
lượng (EMS) hoặc hệ thống quản lý tòa nhà (BMS). -
Kiểm soát từ xa và giám sát: Hệ thống cần có khả năng kiểm soát và giám sát từ xa
để quản lý và theo dõi hoạt động của máy phát từ xa. -
Điều chỉnh tải động: Hệ thống điều khiển có thể cần điều chỉnh tự động hoặc thủ công
tải động để đáp ứng nhu cầu thay đổi trong hệ thống. -
Tuân thủ các tiêu chuẩn và quy định: Hệ thống cần tuân thủ các tiêu chuẩn và quy
định liên quan đến an toàn, bảo vệ môi trường và hiệu suất năng lượng. -
Tích hợp với hệ thống điện thông minh: Trong một môi trường điện thông minh, hệ
thống điều khiển máy phát cần có khả năng tích hợp với các thiết bị và hệ thống thông minh
khác để tối ưu hóa hoạt động của hệ thống điện.
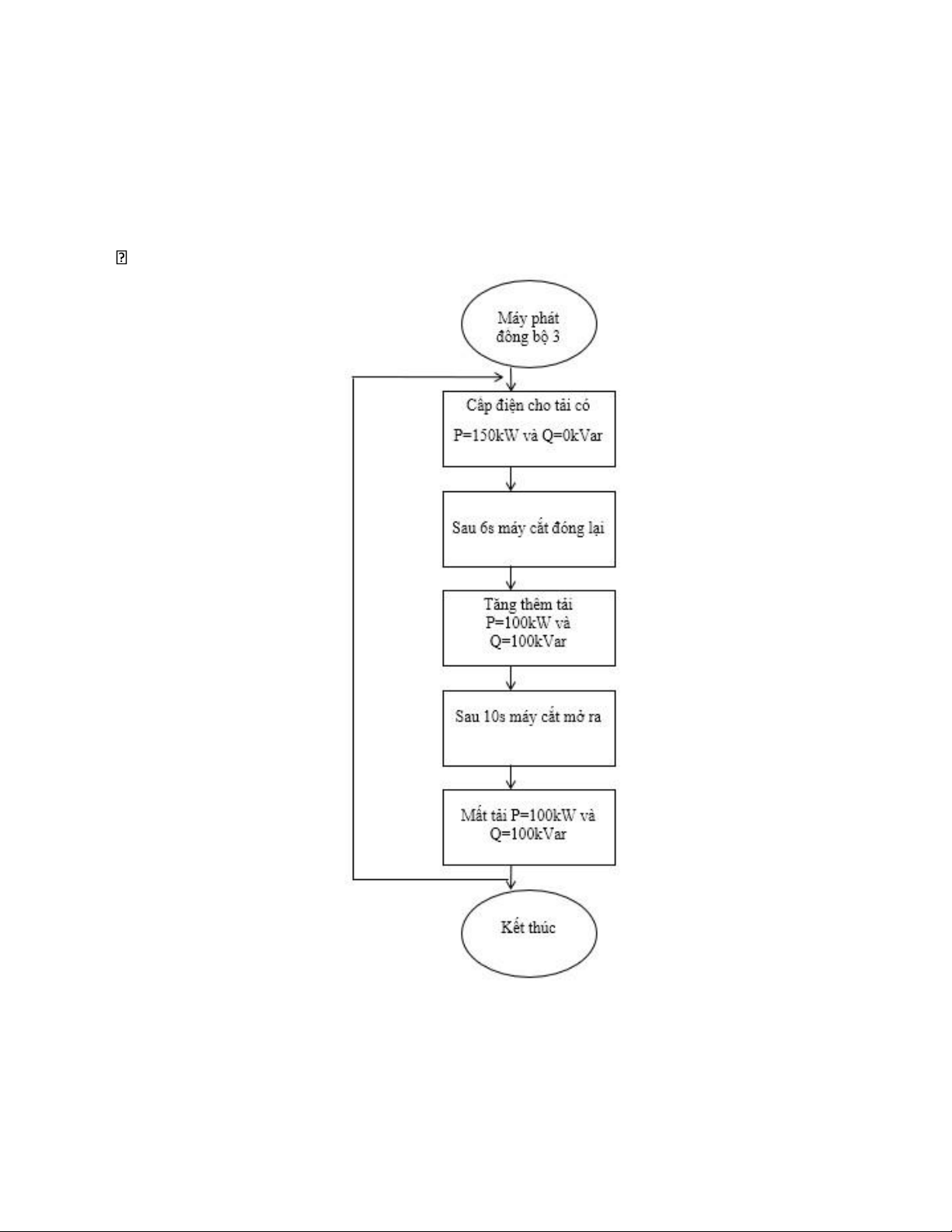
1.3. Cơ sở điều khiển: Nguyên lý điều khiển
Ban đầu máy phát điện 250kVA cấp điện cho tải có công suất 150kW máy cắt sau
khoảng thời gian đặt trước đóng lại tăng thêm tải 100kW và 100kVar, ta có tổng tải là 250kW
và 100kVar chạy một khoảng thời gian đặt trước máy cắt lại mở ra cắt tải 100kW và 100kVar
ra khỏi mạch. Ta dùng bộ điều khiển PI để tần sô và điện áp pha đầu ra luôn ổn định ở 50Hz và 327V.
Khi máy phát đang cấp điện cho tải 150kW thì máy cắt đóng lại làm tăng tải đột ngột
moment quán tính tăng thời gian xác lập dài. Khi máy cắt mở ra cắt bớt tải khỏi mạch
moment quán tính giảm thời gian xác lập ngắn. Lưu đồ giải thuật
Hình 1. 9 Lưu đồ giải thuật quá trình hoạt động
1.4. Mô hình mô phỏng: 1.4.1. Toàn mạch: 1.4.2. Thành Phần:
Xây dựng các khối quan trọng trong mô phỏng
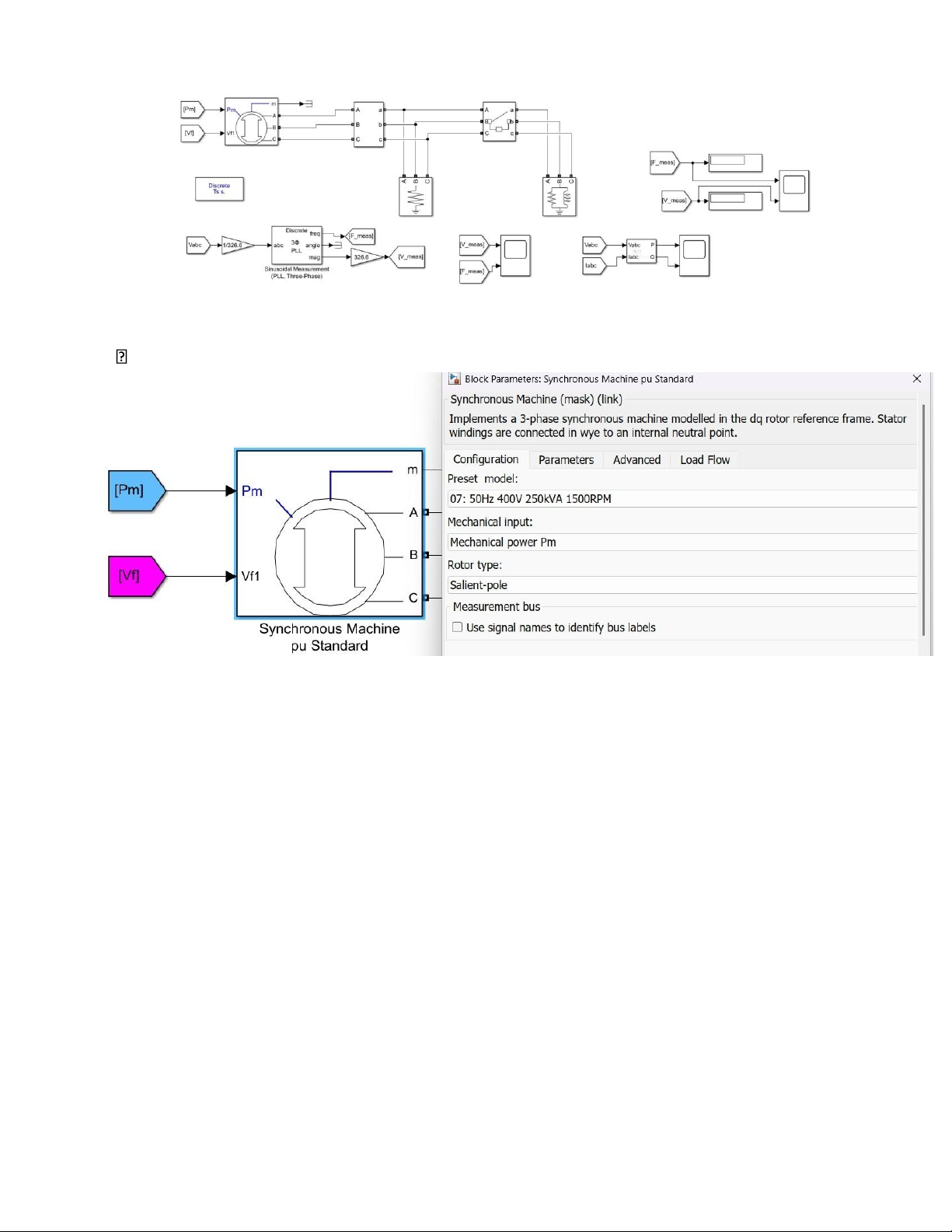
Hình 1. 10 Mô hình máy phát 250kVA, 50Hz, 400V, 1500rpm
- Nút PV (mặc định): Điều khiển công suất hoạt động đầu ra P và cường độ điện áp V.
- Nút PQ: Điều khiển công suất tác dụng đầu ra và công suất phản kháng Q- Nút Swing
(Slack): Điều khiển góc pha và biên độ của điện áp.
Ở đây ta cần kiểm soát điện áp và công suất nên Máy phát chọn loại PV
- Pm, Vf: Công suất cơ và điện áp kích từ để máy phát quay để phát điện áp ở ngõ ra.
- Đầu vào Pm là pu còn Vf không phải là pu.
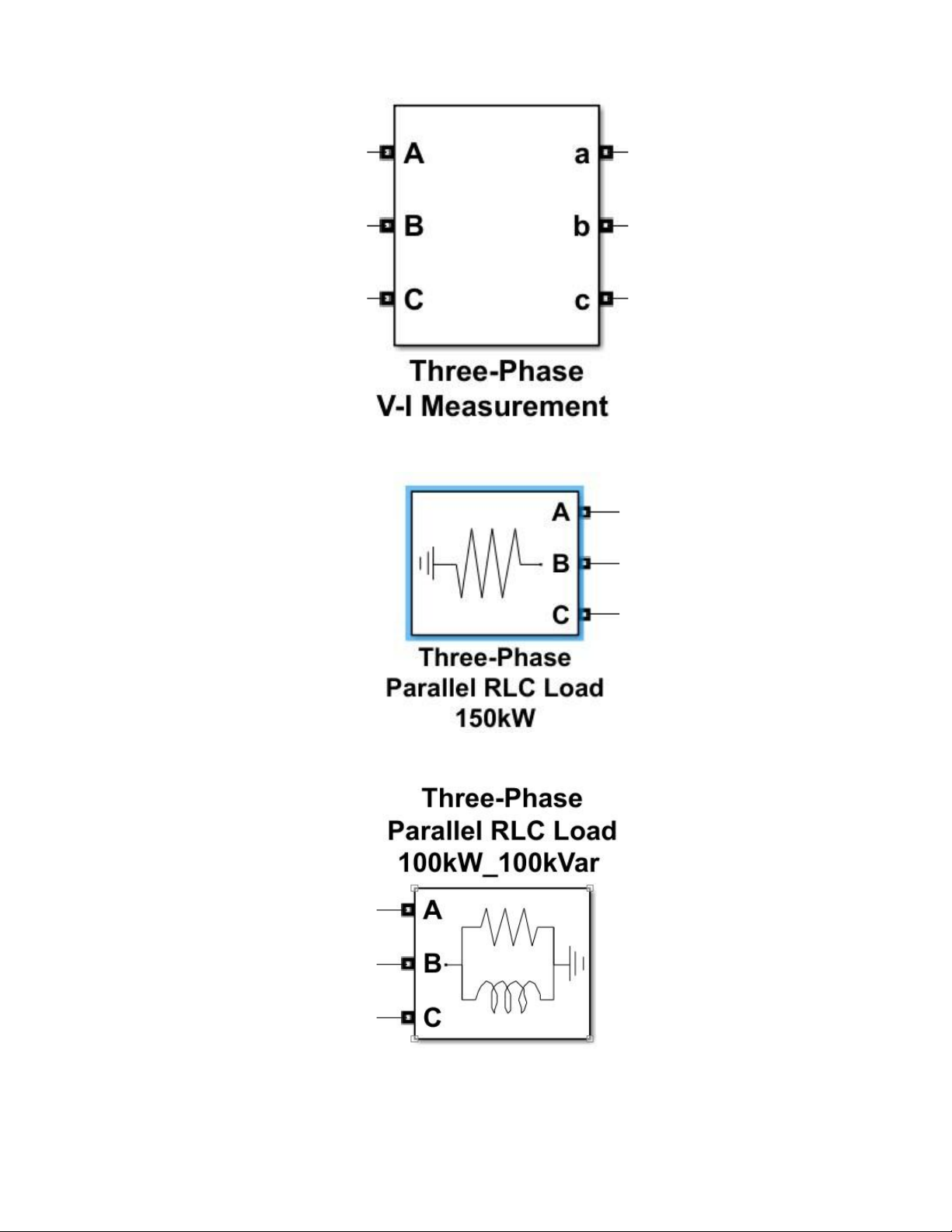
Hình 1. 11 Khối đo dòng áp 3 pha.
Hình 1. 12 Khối tải thuần trở 150kW
Hình 1. 13 Khối tải RC 100kW_100kVar
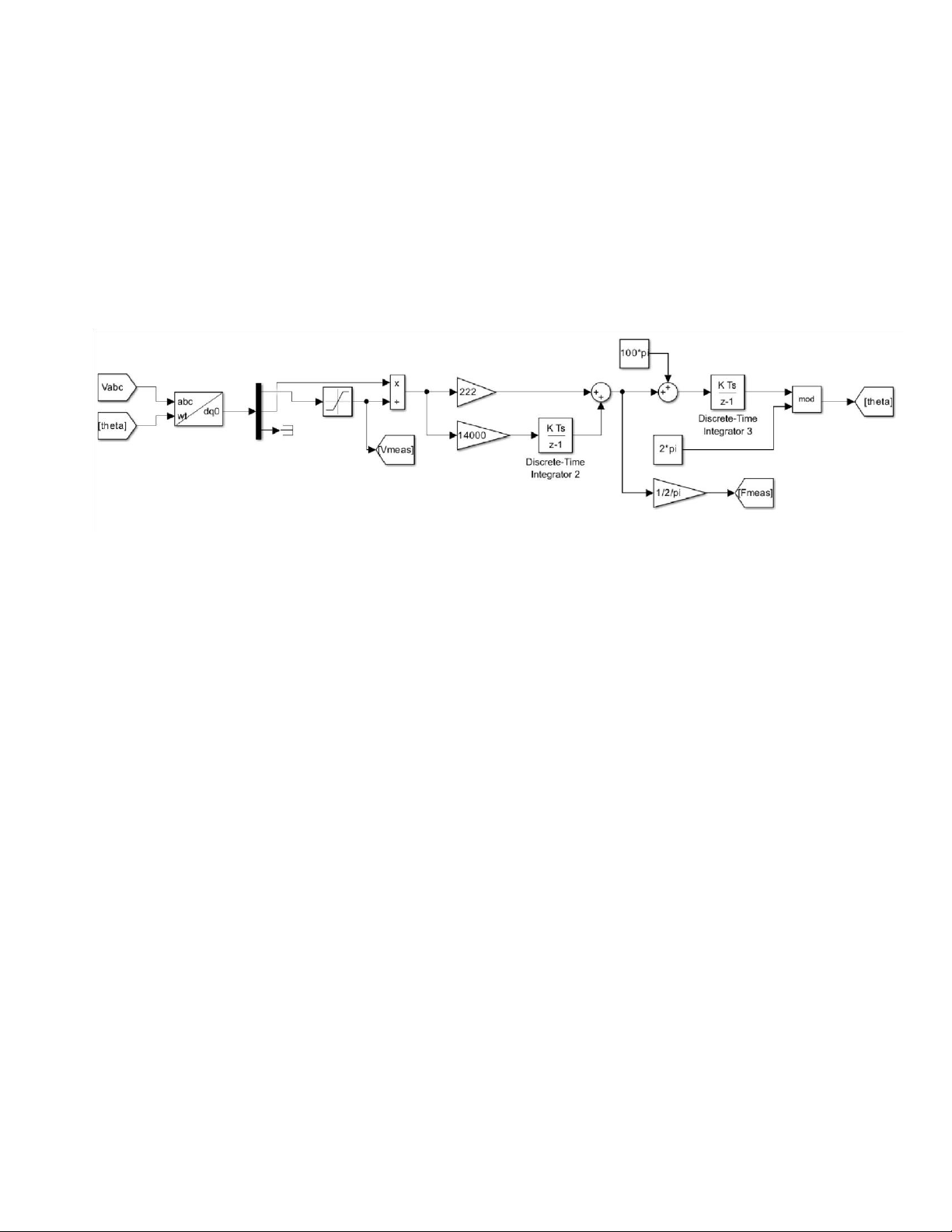
Hình 1. 14 Khối máy cắt 3 pha đóng lại sau 6s_mở ra sau 10s Hình 1. 15 Khối PLL
- PLL là viết tắt của Phase-Locked Loop, là một loại mạch điện tử được sử dụng trong việc
đồng bộ thời gian, giữa tín hiệu vào và tín hiệu ra. Cụ thể, nó bao gồm một giai đoạn xử lý
tín hiệu, đầu vào là tín hiệu không đồng bộ (không được đồng bộ về tần số hay pha với tín
hiệu đầu ra) và đầu ra là một tín hiệu mới có tần số và pha khớp với tín hiệu đầu vào.
- Đầu vào abc đơn vị là pu (giá trị tương đối), nên phải chia 327 để bằng 1 nghĩa là 100% Chia 327 tại vì
(điệnáp phahiệudụng)×2=326.59V (giátrịđỉnh)≈327V . Sau đó đầu ra ta
nhân lại cho 327 để đo được V.
Hình 1. 16 Khối đo công suất P_Q
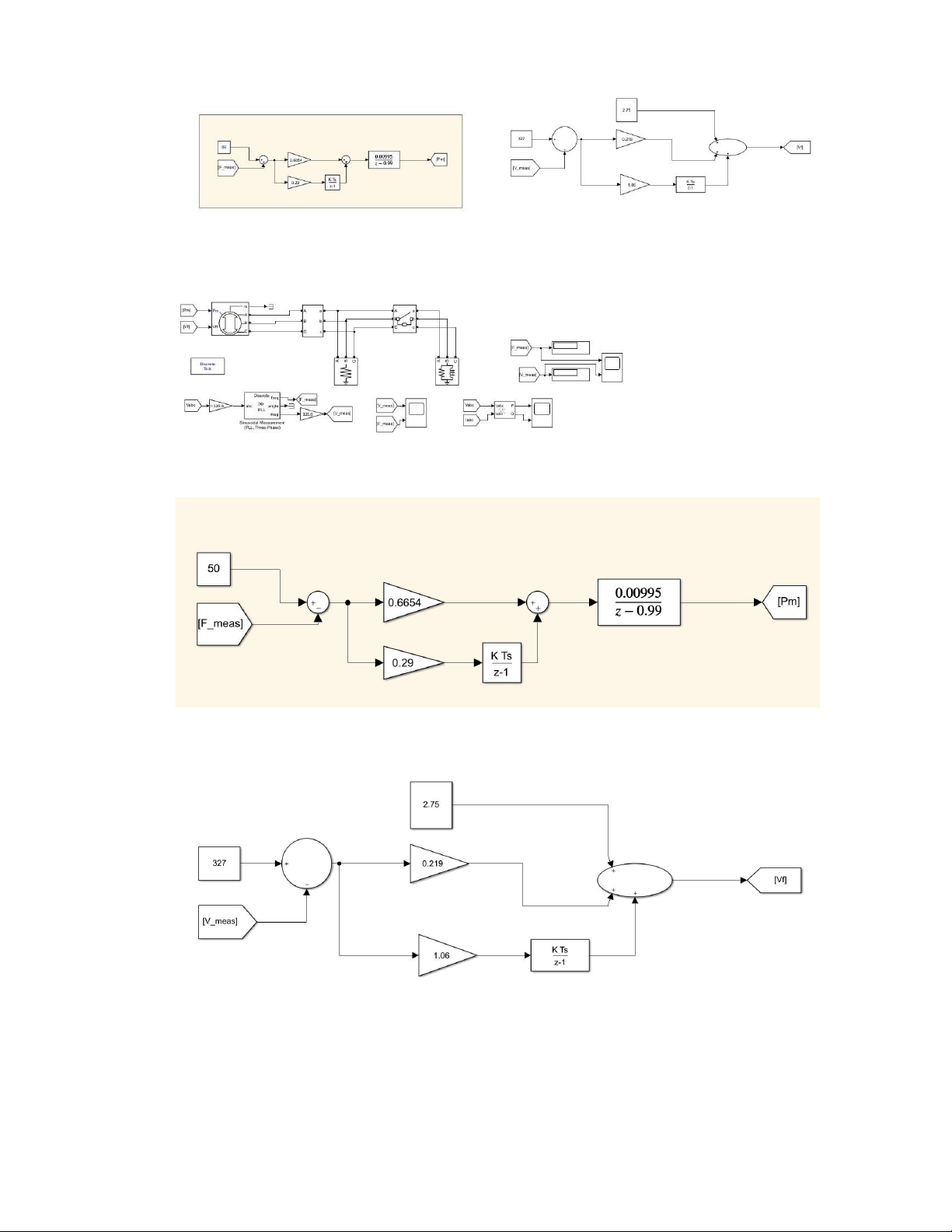
Hình 1. 16 Khối điều khiển điện áp
Hình 1. 17 Khối điều khiển tần số
-Tiến hành xây dựng khối điều khiển tần số (Frequency controller) như hình 4.10 với giá trị
khối “Constan” thiết lập là 50 tức là tần số 50 hz sau khi qua bộ điều khiển Pi tính toán biến
tần số đó thành công suất có cấp cho máy phát. ở đây giá trị của Pm cấp vào sẽ có giá trị như hình 1.18
Hình 1.18. Giá trị công suất cấp cho máy phát.
Sau khi đã có khối điều khiển tần số thì tiếp theo ta sẽ xây dựng khối điều khiển điện áp
(voltage controller) như hình 1.16 giá trị khối “Constan” thiết lập là 327 điện áp cấp vào là
327V sau khi qua bộ điều khiển Pi thì giá trị ngõ ra Vf sẽ được cấp cho máy phát với giá trị
đo được như hình 1.18 bên phải.
Hình 1.9. Khối điều khiển điện áp kích
Khi đã thiết lập xong hai khối điều khiển tần số cấp và điện áp kích của mô hình điều khiển
máy phát thì ta sẽ tiến hành xây dựng khối mô hình tính toán để xuất ra biên độ điện áp và tần
số đo được để ta tiến hành quan xác. Mô hình này được xây dựng như hình 1.13. Các khối “
Goto (V_meas)” và “ Goto (F_meas)” là các biến được thiết lập để khi ta lấy các khối
“From” nhập tên các biến ở khối “Goto” thì khối “From” sẽ nhận các giá trị ở khối “Goto”
sau khi kết nối với scop cũng màng hình thì sẽ hiện thị kết quả đo được khi ta tiến hành chạy chương trình mô phỏng.
Hình 1.20. Mô hình xuất ra biên độ điện áp và tần số đo được.
Cuối cùng ta sẽ xây dựng khối các đo dạng sóng của dòng điện,điện áp, công suất P, công
suất phản kháng Q . Hiện thị các giá trị của tần số, điện áp thiết lập và cân bằng sau khi máy
cắt cắt, các khối đo giá trị cũng như dạng sóng được xây dựng như hình 1.21. Khối bên trên
dùng để hiện thị các giá trị như tần số cũng như điện áp đo được các giá trị này kết nối với
Scope cho ta thấy dạng sóng của chúng. Hai khối bên dưới dùng để quan sát điện áp, dòng
điện, công suất và công suất phản kháng của máy phát trước và sau khi cắt xem mô hình chạy
có đúng với dự kiến ban đầu không.
Tài liệu liên quan:
-

Đáp án Trắc Nghiệm | Môn Điều khiển hệ thống điện công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
199 100 -

Trắc nghiệm Hệ Thống Điện và Máy Biến Áp | Môn Điều khiển hệ thống điện công nghiệp - Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
126 63 -

Báo cáo cuối kỳ Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
224 112 -

Trắc Nghiệm Môn Điều khiển hệ thống điện công nghiệp | Đại học Sư phạm Kỹ thuật Thành phố Hồ Chí Minh
228 114